Presentation #1 ()
advertisement
")
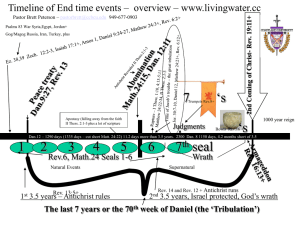
MATV Memorial University All Terrain Vehicle Team members Jonathan Cole Trevor Dwyer Fabio Faragalli Project Overview • Design an autonomous amphibious vehicle able to navigate rough terrain • Allow for the attachment of components for navigation, automation, and various future endeavors • Improve upon the design of existing competitors vehicles that have inherent design weaknesses Project Deliverables • Design and fabrication of one complete hydraulically powered wheel assembly • Design and fabricate a closed hydraulic system to support driven wheels • Design and fabricate robust offroad suspension for vehicle • Design and fabricate amphibious platform to support vehicle automation equipment and payload Design Specifications • • • • • • • • • • • 6 wheel vehicle/platform Hydraulically driven Amphibious Must have enough torque to climb a vertical wall 50 lbs pay load Less than 48” wide 12-14” ground clearance Weight less than 300 lbs At least 2 cubic feet cargo space 24 hour autonomy Attains speed up to 30 km/hr Hydraulic System Motor, Pump & Engine Sizing Example Specifications: • Powered by 6 hydraulic wheel motors • One pump per side, powering 3 hydraulic wheel motors each - in series • Gas powered internal combustion engine, governed at 3600rpm used to run pumps • Employs a closed loop, bi-directional hydraulic transmission (reversible pumps) System Diagram Tank Radiator Filter Q Hydraulic Motors Relief Valve Engine Reversible Pump Check Valves Check Valves Sizing Assumptions • 2 front wheels have enough torque to lift ½ the weight up a vertical wall • 3000psi operating pressure • Hydraulic motors in series – equal pressure drop • MATV Weight 300lbs • Wheel diameter 0.3m • Efficiencies all assumed η = 0.9 • Max speed 30 km/h • Engine governed at 3600rpm Required Wheel Torque D = 0.3m Fr • 1 wheel schematic • Use ½ weight Fg 30° • Fg = (300lbs)(1/2 weight)(1kg/2.2lbs)(9.81m/s^2) • Fr = (Fg)(Sin30 °) • Tr = (Fr)(0.3m) • Tr = 50.2 N·m Sizing Motor Displacement 1000psi (per motor) • Tr = (Dm)(P)(ηmm) • Dm = (50.2 N·m) / (6.89x10^6 N/m^2)(0.9) • Dm = 8.1x10^-6 m^3/rad • Dm = 3.1 in^3/rev Sizing Motor Flowrate • Vmax = (30km/h)(1000m/km)(1h/3600s) • V = (ωm)(π)(0.3m) • ωm = 8.84 rev/s • Qm = (ωm)(Dp) / (ηvm) • Qm = 4.9x10^-4 m^3/s • Qm = 29.5 L/min Sizing Pump Displacement • Qp = Qm (Series) – Pump flowrate • Qp = (ωp)(Dp) / (ηvp) • • • • Dp = (4.9x10-4 m^3/s) / (3600 rev/min)(1min/60sec)(0.9) Dp = 9.1x10^-6 m^3/rev Dp = 9.1 cm^3/rev Dp = 0.55 in^3/rev Hydraulic pump specifications • • • • • Pump type 3070 Nominal Delivery: 32 L/min (29.5 L/min Required) Displacement: 21.33 cm3/ rev (9.1 cm3/ rev Required) Maximum Continuous Pressure 3000 Psi Speed at Maximum Continuous Pressure 3000 rpm Engine Sizing • Rolling Resistance • Assume 10% of operating pressure (300psi) Dp 300psi • Tp = (9.1x10^-6 m^3/rev)(1 rev/2π rad)(2.068x10^6 N/m^3) / (0.9) • Tp = 3.33 N·m • • • • Engine Power Power = (Tp)(3600 rev/min)(1min/60sec)(2π rad/1 rev) Power = 1255W Power = 1.7 HP • Engine runs 2 pumps • Power = 3.4 HP Selected Engine Specifications • Air-cooled, 4-Stroke, OHV, single cylinder • Displacement: 163 cm3 (9.9 cu in) • Net horse power output: 3.6kW (4.8HP) at 3,600 rpm • Net torque:10.3 Nm (7.6 lbs ft) at 2,500 rpm Selected Engine Specifications • • • • • • Starting system: Electric Starter Oil Capacity: 0.6 liter (0.63 US qt) Dry weight: 13.0 kg (28.7 lbs) Dimensions: 12.0 in x 13.4 in x 12.5 in Fuel tank capacity: 3.1 liter (3.3 US qt) Requires 1.26 Qt/h fuel Required Fuel Reserves • Engine requires 1.26 Qt/h • 24h Automation • R = (24h)(1.26 Qt/h)(0.946352 L/Qt) • R = 28.6 L • Design for 32 L (10% reserve) • Modified tank required Suspension • Double A-arm suspension chosen • Upper a-arm shock mount chosen – More clearance for hydraulic motors • Allows for maximum suspension travel and ground clearance in offroad environments Existing Competition Frontline Robotics Foster Miller Gantt Chart MATV Project Management Plan 7-Jan-10 Kickoff Meeting Webpage Design Research Project Presentation 1 System Sizing Component Selection Design Mini Report 1 Parts Ordering Project Presentation 2 Fabrication Mini Report 2 Testing Final Presentation Final Report 27-Jan-10 16-Feb-10 8-Mar-10 28-Mar-10 17-Apr-10 Questions!!!