lecture 4
advertisement

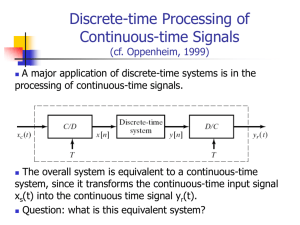
Husheng Li, UTK-EECS, Fall 2012 DISCRETE-TIME SIGNAL PROCESSING LECTURE 4 (SAMPLING) PERIODIC SAMPLING Sampling: 𝑥 𝑛 = 𝑥𝑐 (𝑛𝑇), where T is the sampling period. In practice, it is done by A/D converter. The sampling operation is generally invertible. TWO STAGE REPRESENTATION We represent the sampling procedure in two stages: • Multiplication with an impulse train 𝑠 = ∞ −∞ 𝛿(𝑡 − 𝑛𝑇) with output 𝑥𝑠 𝑡 = 𝑥𝑐 𝑡 𝑠 𝑡 . • Conversion from impulse train to discrete time sequence Note: this is a mathematical formulation, not a physical circuit implementation FREQUENCY-DOMAIN REPRESENTATION The frequency domain of the post-sampling signal is given by 𝑋𝑠 𝑗𝑤 ∞ 1 = 𝑋𝑐 (𝑗(𝑤 − 𝑘𝑤𝑠 )) 𝑇 𝑘=−∞ Assume that the signal has a limited band −𝑤𝑁 , 𝑤𝑁 . If the sampling frequency satisfies 𝑤𝑠 ≥ 2𝑤𝑁 , there will be no overlap. EXACT RECOVERY An ideal low pass filter can be used to obtain the exact original signal. ALIASING If the inequality 𝑤𝑠 ≥ 2𝑤𝑁 is not valid, the frequency copies of signal will overlap, which incurs a distortion called aliasing. See the example of cosine function. NYQUIST-SHANNON THEOREM Theorem: For a band limited signal within band −𝑤𝑁 , 𝑤𝑁 , it is uniquely determined by its samples 𝑥𝑐 (𝑛𝑇), if 𝑤𝑠 ≥ 2𝑤𝑁 . EXAMPLE OF SINUSOIDAL SIGNAL RECONSTRUCTION OF A BANDLIMITED SIGNAL The reconstruction is given by 𝑥𝑟 𝑡 ∞ = 𝑛=−∞ sin(𝜋 𝑡 − 𝑛𝑇 /𝑇) 𝑥(𝑛) 𝜋 𝑡 − 𝑛𝑇 /𝑇 INTUITIVE EXPLANATION It can be used for D/C converter: 𝑋𝑟 𝑗𝑤 = 𝐻𝑟 𝑗𝑤 𝑋(𝑗𝑤) DISCRETE-TIME PROCESSING We can use C/D converter to convert a continuous-time signal to a discrete-time one, process it in a discrete-time system, and then convert it back to continuous time domain. EXAMPLE: LTI AND LPF We can use a discrete-time low pass filter (LPF) to do the low pass filtering for continuous time signal. EXAMPLE: LTI AND LPF The ideal low pass discrete-time filter with discrete-time cutoff frequency w has the effect of an ideal low pass filter with cutoff frequency w/T. CONTINUOUS-TIME PROCESSING OF DISCRETETIME SIGNALS We can also use continuous-time system to process discrete-time signals. RESAMPLING: DOWNSAMPLING The downsampling 𝑥𝑑 𝑛 = 𝑥(𝑛𝑀) implies 1 𝑋𝑑 𝑗𝑤 = 𝑀 𝑀−1 𝑖=0 𝑤 𝑋(𝑗( − 2𝜋𝑖/𝑀)) 𝑀 INTUITION IN THE FREQUENCY DOMAIN With aliasing Without aliasing DECIMATOR A general system for downsampling by a factor of M is the one shown above, which is called a decimator. UPSAMPLING The upsampling is given by 𝑥𝑖 𝑛 = 𝑥(𝑛/𝐿), where L is the integer factor. EXPANDER The output of expander is given by 𝑥𝑒 𝑛 = ∞ −∞ 𝑥(𝑘)𝛿(𝑛 − 𝑘𝐿 . In the frequency, we have 𝑋𝑒 𝑤 = 𝑋 𝑤𝐿 . INTERPOLATOR It can be shown that the above structure realizes the upsampling and interpolates the signals between samples: ∞ sin(𝜋(𝑛 − 𝑘𝐿)/𝐿) 𝑥𝑖 𝑛 = 𝑥(𝑘) 𝜋(𝑛 − 𝑘𝐿)/𝐿 −∞ SIMPLE AND PRACTICAL INTERPOLATION The ideal interpolator is impossible to implement. In practice, we can use a linear interpolator: 𝑛 ℎ 𝑛 = 1 − 𝐿 , |𝑛| ≤ 𝐿 0, 𝑜𝑡ℎ𝑒𝑟𝑤𝑖𝑠𝑒 TIME AND FREQUENCY OF LINEAR INTERPOLATOR CHANGING SAMPLING RATE BY A NON-INTEGER FACTOR The change of sampling rate by a non-integer factor can be realized by the cascade of interpolator and decimator. THE FREQUENCY INTUITION MULTIRATE SIGNAL PROCESSING Multirate techniques refer in general to utilizing upsampling, downsampling, compressors and expanders in a variety of ways to improve the efficiency of signal processing systems. INTERCHANGE OF FILTERING WITH COMPRESSOR / EXPANDER The operations of linear filtering and downsampling / upsampling can be exchanged if we modify the linear filter. MULTISTAGE DECIMATION The two stage implementation is often much more efficient than a single-stage implementation. The same multistage principles can also be applied to interpolation DIGITAL PROCESSING OF ANALOG SIGNALS In practice, continuous time signals are not precisely band limited, ideal filters cannot be realized, ideal C/D and D/C converters can only be approximated by A/D and D/A converters. PREFILTERING TO AVOID ALIASING We can use oversampled A/D to simplify the continuous-time antialiasing filter. FREQUENCY DOMAIN INTUITION Key point: the noise is aliased; but the signal is not. Then, the noise can be removed using a sharp-cutoff decimation filter. A/D CONVERSION SAMPLE-AND-HOLD The zero-order-hold system has the impulse response given by 1, 0 < 𝑡 < 𝑇 ℎ0 𝑡 = 0, 𝑜𝑡ℎ𝑒𝑟𝑤𝑖𝑠𝑒 QUANTIZATION This quantizer is suitable for bipolar signals. Generally, the number of quantization levels should be a power of tow, but the number is usually much larger than 8. ILLUSTATION D/A CONVERSION The ideal D/A is given by ∞ sin(𝜋 𝑡 − 𝑛𝑇 /𝑇) 𝑥𝑟 𝑡 = 𝑥(𝑛) 𝜋 𝑡 − 𝑛𝑇 /𝑇 𝑛=−∞ In practice, we need to use the above structure. OVERSAMPLING Oversampling can make it possible to implement sharp cutoff antialiasing filtering by incorporating digital filtering and decimation. Oversampling and subsequent discrete-time filtering and downsampling also permit an increase in the step size of the quantizer, or equivalently, a reduction in the number of bits required in the A/D conversion.