Presentation2

Damage Detection in a Simple Shear Beam Model:
Modal Analysis and Seismic Interferometry
Vanessa Heckman
Monica Kohler
Tom Heaton
May 25, 2012
University of Memphis
Overview
• Modeling a building as a continuous beam
• Seismic Interferometry of UCLA Factor Building
• Experimental Analysis Using Uniform Shear Model
Flexible Building as a Continuous
Cantilevered Beam
• Dynamic motions of a continuous beam can provide insight into the deformation of buildings.
• Example: MRF
•
•
•
• If the building is considered as a continuum, it would often be anisotropic.
Stiffness associated with inter-story drift ( ε
13 and ε
23
) much less than the stiffness associated with shearing the actual floor slabs
(ε
12
).
Stiffness associated with extension along columns ( ε than for extension along the floor slabs (ε
11 and ε
22
).
33
) is different
Assume that only parts of the strain tensor which are important to describe the deformation of the building are inter-story shear strain and extensional strain along the columns.
• Can thus approximate the building as being isotropic, since the other elastic moduli are not important.
Heaton, T. CE 151 Class Material, 2010.
Shear Beam
•
•
•
•
When the ground beneath the building moves horizontally, this is identical to the problem of having an SH wave propagate vertically in a layer of building; the bending is approximately zero in this case.
Total stiffness against shear is equal to the shear modulus times the cross sectional area.
While actual buildings are neither a true bending beam nor a shear beam, we can gain some useful insight by looking at these approximate modes of deformation.
It is identical to the problem of a vertically propagating SH wave in a plate with a rigid boundary at the bottom and a free boundary at the top.
Heaton, T. CE 151 Class Material, 2010.
Shear Beam
• Solution to this problem can be written as a sum of reflecting pulses. The motion in the building is given by
• u
1 g (t) Horizontal motion of the ground at the base of the building c = β = Shear wave velocity in the building
Drift is given by
•
•
•
Base of the building: zero displacement, double the drift
Top of the building: zero drift, double the displacement
Sequence repeats with periodicity 4 h/c , which is the fundamental period of the building oscillation.
Heaton, T. CE 151 Class Material, 2010.
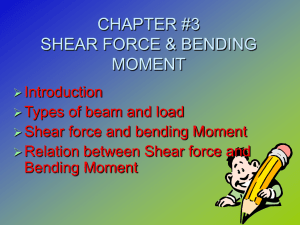
Shear Beam
• Mode Shapes for the first four modes
• Natural Frequencies
Background: UCLA Factor Building
• UCLA Factor Building
•
•
•
• 17-story, moment-resisting steel-frame structure
Embedded 72-channel accelerometer array
N-S modal frequencies: 0.59 Hz, 1.8 Hz, 3.1 Hz (1:3:5 ratio for shear beam)
E-W modal frequencies: 0.55 Hz, 1.6 Hz, 2.8 Hz (1:3:5 ratio for shear beam)
• Experimental data and numerical model (ETABS)
Kohler, M. Heaton, T., Bradford, C. 2007. BSSA.
Background: UCLA Factor Building
•
•
•
Impulse Response Function
• Deconvolution is used to extract the transfer function
•
•
Bandpass filtered between 0.5 Hz and 10 Hz
Stack over small EQs to stay in linear response
Shear beam: waves travel nondispersively throughout the lower floors of the building (v = ~160 m/sec)
Experimental Hammer Test
For bending beams, the waves would disperse with the wave velocity increasing as the square root of the frequency
Impulse Response Functions
Kohler, M., Heaton, T., Bradford, C. 2007. BSSA.
Laboratory Example: Uniform Shear Beam
• Experimental Setup
• Five-story uniform shear model
• Piezoelectric accelerometers, DAQ
• Force transducer hammer
• Shake table, signal generator
• Damaged/undamaged configuration
Laboratory Example: Uniform Shear Beam
•
•
Consider the structure modeled by a multi-degree-of-freedom system x ( t )
=
çç
è
ç
ç
ç
ç
ç
æ x
1
( t ) x
2
( t ) x
3
( t ) x
4
( t ) x
5
( t )
÷÷
ø
÷
÷
÷
÷
÷
ö
Mx ( t )
+
Cx ( t )
+
Kx ( t )
= f ( t )
M
= m
ç
ç
æ
çç
è
ç
ç
1 0 0 0 0
0 1 0 0 0
0 0 1 0 0
0 0 0 1 0
0 0 0 0 1
÷
÷
÷
ö
÷÷
ø
÷
K
= k
ç
ç
ç
æ
çç
è
ç
2
-
1 0 0 0
-
1 2
-
1 0 0
0
-
1 2
-
1 0
0 0
-
1 2
-
1
0 0 0
-
1 1
Compute constants m, k from mass, geometry, and material properties
÷
÷
÷
ö
÷÷
ø
÷
•
• m: Mass of each floor k: Stiffness due to bending plate (column)
• Determine the mode shapes and frequencies of the system from the eigenvalues and eigenvectors of M -1 K
• Damping is found experimentally
•
•
•
1 st mode: logarithmic decrement method
Higher modes: half-power bandwidth method
Neglected: ζ n
< 0.005, n = 1,…,5
Kohler, M., CE 181 Class Notes, 2010.
MDOF System
• Transfer function used to find mode shapes
• Relates the response at DOF k to simple harmonic excitation at DOF m
H km
( w r
)
N
å
r
=
1
M rr
(
f r k f r m w
2 +
2 i z r w r
+ w r
2
) f z r r w k r k th component of the r th mode shape modal damping frequency of the r th mode
• Consider the transfer function at the r th modal frequency
H km
( w r
)
= f r k f
M (2 z m r r w r
2
) i
+
0
H
H km
( w mm
( w r r
)
)
= f f r r k m f f r r m m
= f r k f r m
Kohler, M., CE 181 Class Notes, 2010.
Damping Coefficient
•
•
Logarithmic Decrement Method
1 st Mode damping ratio
Free vibration
Half-Power Bandwidth Method
• Higher Mode damping ratio
• Based on the response of a SDOF system, but can be used for MDOF system as long as there is no coupling between the modes
• Can be problems obtaining low damping ratio due to freq resolution
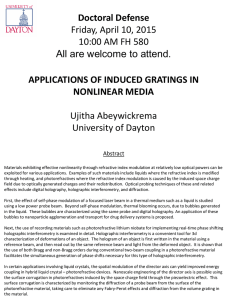
Mode Shapes, Frequencies, and Wave Propagation
•
•
• Calculated vs. Observed: Good agreement
Damage: Introduced at the 4 th floor
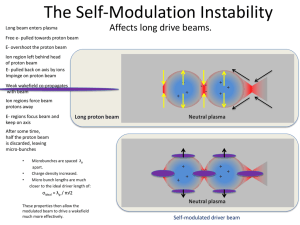
Damaged vs. Undamaged
• Significant decrease in frequencies
•
• Changes in mode shapes
Changes in wave propagation
ω
1
ω
2
ω
3
ω
4
ω
5
Calculate d
3.2
9.5
14.9
19.2
21.9
Observed Damaged
3.3
9.6
15.2
20.0
22.4
2.6
6.2
10.8
14.6
21.2
SH Plane Waves
• Ray Path Diagram
• Continuous displacements
• Continuous tractions
• Reflection/Transmission Coefficients
β
2
< β
1
θ
T transmitted
β
2
=sqrt (μ
2
/ρ
2
) x
1
β
1
=sqrt (μ
1
/ρ
1
) incident
θ
I x
3
θ
R reflected
• Vertical incidence
•
•
•
Fixed Surface: R ss
= -1
Free Surface: R ss
= 1
Higher to Lower Velocity/Stiffness: R ss
> 0; T ss
> 1
Heaton, T. CE 151 Class Material, 2010.
Experimental Results: 1
st
Floor
Experimental Results: 2
nd
Floor
Experimental Results: 3
rd
Floor
Experimental Results: 4
th
Floor
Experimental Results: 5
th
Floor
Seismic Interferometry
• Seismic interferometry may aid in damage detection by comparing post-event waveforms with pre-event waveforms
• Changes in wave speed
• Floor-to-floor reflections
• Forward modeling using a numerical model
(ETABS) will be used to test the application to civil structures
Impulse Response Function
Kohler, M., Heaton, T., Bradford, C. 2007. BSSA.
Hayashi, Y., Sugino, M., Yamada, M., Takiyama, N., Onisha, Y. 2012. STESSA
Acknowledgements
• Thomas Heaton, Professor of Seismology, Caltech
• Dr. Monica Kohler, Researcher, Caltech
• Ming Hei Cheng, PhD Candidate, Caltech
• Rob Clayton, Professor of Geophysics, Caltech
• Hartley Fellowship
• Housner Fund
THANK YOU!
Questions?
Seismic Interferometry
•
• Cross-Correlation of Ambient Noise vs Deconvolution
Synthetic Example: Simple Shear Beam
• D’Alembert Solution
• Cross-Correlation
• Deconvolution
12
10
8
6
4
2
0
0
IRF
0.5
1
12
10
8
6
4
2
0
0
Cross-
Correlation
0.5
Time (s)
1
12
10
8
6
4
Deconvolution
2
0
0 0.5
1
Seismic Interferometry
• IRF from Cross-correlation of Ambient Noise
Prieto, G., Lawrence, J..Chung, A., Kohler, M. 2010