ppt
advertisement

Uninformed Search
Reading: Chapter 3 by today, Chapter 4.1-4.3 by
Wednesday, 9/12
Homework #2 will be given out on Wednesday
DID YOU TURN IN YOUR SURVEY? USE
COURSEWORKS AND TAKE THE TEST
Pending Questions
Class web page:
http://www.cs.columbia.edu/~kathy/cs
4701
Reminder: Don’t forget assignment
0 (survey). See courseworks
2
When solving problems, dig at
the roots instead of just hacking
at the leaves.
Anthony J. D'Angelo, The College
Blue Book
3
Agenda
Introduction of search as a problem-solving
paradigm
Uninformed search algorithms
Example using the 8-puzzle
Formulation of another example: sodoku
Transition to greedy search, one method for
informed search
4
Goal-based Agents
Agents that work towards a goal
Select the action that more likely achieve
the goal
Sometimes an action directly
achieves a goal; sometimes a series
of actions are required
5
Problem solving as search
Goal formulation
Problem formulation
Actions
States
6
Uninformed
Search through the space of
possible solutions
Use no knowledge about which path
is likely to be best
7
Characteristics
Before actually doing something to solve
a puzzle, an intelligent agent explores
possibilities “in its head”
Search = “mental exploration of
possibilities”
Making a good decision requires exploring
several possibilities
Execute the solution once it’s found
8
Formulating Problems as Search
Given an initial state and a goal, find the sequence
of actions leading through a sequence of states to
the final goal state.
Terms:
Successor function: given action and state, returns
{action, successors}
State space: the set of all states reachable from the
initial state
Path: a sequence of states connected by actions
Goal test: is a given state the goal state?
Path cost: function assigning a numeric cost to each path
Solution: a path from initial state to goal state
9
Example: the 8-puzzle
How would you use AI techniques
to solve the 8-puzzle problem?
10
8-puzzle URLS
http://www.permadi.com/java/puzzle8
http://www.cs.rmit.edu.au/AISearch/Product
11
8 Puzzle
States: integer locations of tiles
(0 1 2 3 4 5 6 7 B)
(0 1 2)(3 4 5) (6 7 B)
Action: left, right, up, down
Goal test: is current state = (0 1 2 3 4 5
6 7 B)?
Path cost: same for all paths
Successor function: given {up, (5 2 3 B 1
8 4 7 6)} -> ?
What would the state space be for this
problem?
12
What are we searching?
State space vs. search space
Nodes
State represents a physical configuration
Search space represents a tree/graph of
possible solutions… an abstract configuration
Abstract data structure in search space
Parent, children, depth, path cost, associated
state
Expand
A function that given a node, creates all
children nodes, using successsor function
13
14
Data structures:
Searching data
AI: Searching solutions
15
Uninformed Search Strategies
The strategy gives the order in which
the search space is searched
Breadth first
Depth first
Depth limited search
Iterative deepening
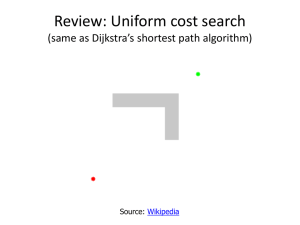
Uniform cost
16
Breadth first Algorithm
17
18
19
20
21
Depth-first Algorithm
22
23
24
25
26
27
28
29
30
Complexity Analysis
Completeness: is the algorithm
guaranteed to find a solution when there
is one?
Optimality: Does the strategy find the
optimal solution?
Time: How long does it take to find a
solution?
Space: How much memory is needed to
perform the search?
31
Cost variables
Time: number of nodes generated
Space: maximum number of nodes stored
in memory
Branching factor: b
Depth: d
Maximum number of successors of any node
Depth of shallowest goal node
Path length: m
Maximum length of any path in the state
space
32
Can we combine benefits of both?
Depth limited
Select some limit in depth to explore the
problem using DFS
How do we select the limit?
Iterative deepening
DFS with depth 1
DFS with depth 2 up to depth d
33
34
35
36
Properties of the task environment?
Fully observable
Deterministic
Episodic
Static
Discrete
Single agent
Partially
observable
Stochastic
Sequential
Dynamic
Continuous
Multiagent
37
Three types of incompleteness
Sensorless problems
Contingency problems
Adversarial problems
Exploration problems
38
End of Class Questions?
39
Sodoku
40
Informed Search
Heuristics
Suppose 8-puzzle off by one
Is there a way to choose the best
move next?
Good news: Yes!
We can use domain knowledge or
heuristic to choose the best move
42
0
1
2
3
4
5
6
7
43
Nature of heuristics
Domain knowledge: some
knowledge about the game, the
problem to choose
Heuristic: a guess about which is
best, not exact
Heuristic function, h(n): estimate
the distance from current node to
goal
44
Heuristic for the 8-puzzle
# tiles out of place (h1)
Manhattan distance (h2)
Sum of the distance of each tile from its
goal position
Tiles can only move up or down city
blocks
45
0
1
2
3
4
5
6
7
Goal State
0
1
2
0
2
5
3
4
5
3
1
7
7
6
6
h1=1
h2=1
4
h1=5
h2=1+1+1+2+2=7
Best first searches
A class of search functions
Choose the “best” node to expand
next
Use an evaluation function for each
node
Estimate of desirability
Implementation: sort fringe, open
in order of desirability
Today: greedy search, A* search
47
Greedy search
Evaluation function = heuristic
function
Expand the node that appears to be
closest to the goal
48
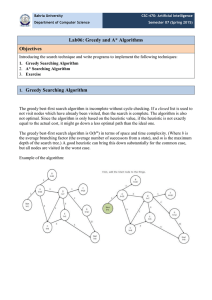
Greedy Search
OPEN = start node; CLOSED = empty
While OPEN is not empty do
Remove leftmost state from OPEN, call it X
If X = goal state, return success
Put X on CLOSED
SUCCESSORS = Successor function (X)
Remove any successors on OPEN or CLOSED
Compute heuristic function for each node
Put remaining successors on either end of OPEN
Sort nodes on OPEN by value of heuristic function
End while
49
End of Class Questions?
50