Chapter 8:
advertisement

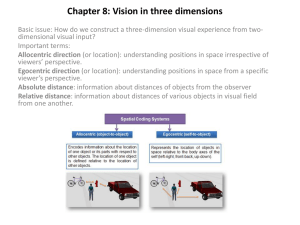
Chapter 8: Seeing a Three-Dimensional World The visual system must compute: Depth (distance of an object from the perceiver) Egocentric direction (direction of an object relative to the perceiver) Allocentric frame of reference Independent of the vantage point of a viewer. Examples: Ten miles north of the Eiffel Tower. Half way between Detroit and Chicago. Not nearly as useful to perceiver’s as egocentric direction. Egocentric views are specified relative to fixation points in one’s field of view: Cartesian co-ordinates. Polar co-ordinates. People are good at describing the locations of objects independent of their field of view. Egocentric viewing People are good at locating points in free viewing. Marksmen Pointing at points of light in the dark People are poor at locating points in the periphery of their visual field. Remarkable Vernier acuity Can discriminate less than the width of human hair. 1/6 the size of a single cone photoreceptor Fixation point ≠ point of attention Posner (1980), Posner, Snyder, & Davidson (1980) Inverted Goggles George Stratton (1897) Linden, et al., (1999). Depth perception Camera vs. the visual system Both are initially 2D. Retinal image is constantly moving. Visual system has two eyes. Depth is not directly perceived. Depth is judged via a series of cues that work over different ranges. Depth is judged absolute distance and relative distance. Effectives distances of cues Personal space: ~1.5 meters Action space: ~30 meters Vista space: beyond action space in visual space. Broad distinction among types of cues Oculomotor Visual Oculomotor depth cues Angle of convergence of the eye muscles Accommodation of the lens of the eyes Accommodation Accommodation works only at relatively close distances (< a few meters). Not very accurate Convergence Works for short distance (< 6 meters). Can be used in isolation from accommodation. Visual cues Binocular Monocular Binocular cues Retinal disparity = the difference in distance between two objects as seen from the left eye and the right eye. Stereoscope Charles Wheatstone (1838/1964). Two drawings on an object. One from a perspective ~65 mm from the perspective of the other. Show one image to one eye and the other image to the other eye. Computing retinal disparity Identify features to match. Compute magnitude and direction of disparity. Computing retinal disparity Identify features to match. E.g. a face in one eye and a face in the other, a bottle in one eye and a bottle in the other. Random dot stereograms. Compute magnitude and direction of disparity. Computing retinal disparity Identify and compare only low frequency information. (Ignore or filter out high frequency information.) Digression: Binocular rivalry When two patterns can be fused, they are. When two patterns cannot be fused, they create a mosaic or sometimes one merely attends to one rather than the other. Some binocular cells are selective for zero- retinal disparity. Some binocular cells are selective for some degree of retinal disparity. Cats with monocular stimuli. Stereoblindness Some people (5-10%) are unable to detect depth from disparity. These individuals may be those who cannot see “magic eye” images. Most common cause may be strabismus, a misalignment of the two eyes. Monocular depth information Motion parallax As you move through the world, objects at different distances move at different rates. This provides a powerful depth cue. This occurs either when the viewer or the objects viewed move. Some depth from motion demos: http://epsych.msstate.edu/descriptive/Visio n/mparallax/DC4a.html Interposition Occlusion of one object by another is perhaps the most elementary depth cue. The potency of occlusion is revealed in Kanisza figures. Amodal completion We perceive occluded objects as complete wholes, when it is logically possible that they are mere parts of objects. Sekuler & Palmer, (1992) Perceptual representations of partially occluded objects start out as a mosaic-like snapshot of the individual pieces, then evolves over time into perceptually complete objects. Occlusion and transparency Lightness values within the “covered” regions must be intermediate between the lightness values of the “uncovered” regions. The occluding transparent object must be plausibly a single object. Special case: Occlusion and Transparency Occlusion and transparency Lightness values within the “covered” regions must be intermediate between the lightness values of the “uncovered” regions. The region must be plausibly a single object. A region will be perceived as transparent only if binocular disparity specifies that the region is in front of the object. Neon spreading Colors move from one region to the next. The role of occlusion is found in: Amodal completion Illusory figures Transparency Neon spreading Size cues for depth Perspective Linear perspective (objects receding) Aerial perspective (blur, haze) Shading Integration of depth information Size, interposition, motion, and perspective interact additively (Bruno and Cutting, 1998). Depth cues compete. When two cues give conflicting evidence,