automatic flight control system (afcs) - AVIONICA-ALA-22
advertisement
 - AVIONICA-ALA-22")
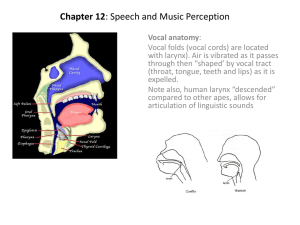
AUTOMATIC FLIGHT CONTROL SYSTEM (AFCS) • The AFCS incorporates several features to reduce pilot workload: • stability augmentation, • control augmentation, • manual, auto trim facilities and various autopilot modes. • The digital electronics Automatic Flight Control System (AFCS) is fully coupled in four axes (pitch, roll, yaw & collective) to enhance handling qualities • The AFCS has duplex lanes in pitch, roll and collective axes and has a simplex lane in yaw axis. • Each lane is built around one Automatic Flight Control Computer (AFCC). • • • • • • • • • • • • The system consists of two AFCS computers, two Attitude Heading Reference Systems (AHRS), two Air Data Units, one Vertical Gyro, one Pilot Control Unit (PCU) and Reconfiguration switches. The system is integrated to avionics equipments such as radio altimeter, weather radar. Integrated Architecture Display System (IADS), which provides the cockpit displays (AFCS master warning, AFCS annunciation for autopilot mode status and failure warning,heading bug, AFCS reference bug for airspeed, baroaltitude and Radio height hold). • Aircraft control inputs are achieved through the use of series actuators also known as • CSAS actuators in pitch, roll, yaw and collective. The CSAS actuators are integrated • with the main hydraulic boosters and are electrohydraulic servo actuators • with limited authority of ± 12% for pitch, roll and collective axis. • There is a simplex CSAS actuator for yaw axis with maximum authority of ± 20%. • Auto trim is achieved through parallel actuators in pitch, roll, yaw and collective with 100% authority. • The Trim/Force Feel System (FFS) is an electromechanical unit interfaced • 1. with the mechanical flight control system and • 2.with the Automatic Flight Control system (AFCS). • 3.The Trim/FFS can be operated directly through manual control as well as by the AFCS. Auto trim actuators provides the following: • • • • • • • 1. Engagement/Disengagement of anchor point by means of a magnetic clutch in the spring based actuators. This anchor point can be displaced either automatically or manually. 2. Artificial Force Feel about the anchor point generating a predetermined feel force. The artificial feel is proportional to displacement in pitch, roll and collective trim actuator as these trim actuators are spring based. The force feel is a constant friction in the yaw axis. 3. Pilot input detection by means of a dual micro-switch. 4. Measure of pilot control displacement from the neutral position. 5. Pilot controlled displacement of the anchor point by means of an electrical motor (manual trim function) or by declutching the artificial feels (stick release function). “Manual trim” and “stick release” are operative even when the AFCS is disconnected for pitch, roll & collective Trim/FFS units 6. Automatic displacement of the anchor point so as to maintain the series actuators around their center position (auto trim function). 7. Viscous damping of the output shaft rotation when the anchor point is disengaged so as to prevent overshoots or oscillations in spring based Trim/FFS unit. Stability Augmentation: • This forms the inner loop of the AFCS. It is a prerequisite for the AP modes and is engaged at all times (from engagement of AFCS to its disengagement). • The objectives are as under: • - To provide basic stabilisation throughout the flight envelope. • - To reduce pilot workload in turbulence. • - To provide long-term attitude retention for hands-off flying and short-term attitude retention in reversionary mode. Control Augmentation: • This is designed to optimize the handling qualities. This is engaged at all times. Auto-Trim: • Four trim actuators, one each in pitch, roll, collective and yaw axes are provided to • enable AFCS to provide auto trim facility. This is designed to ensure that the series • actuators are not saturated and always operate about their center. Auto-Pilot Modes: • The system supports the following AP modes: • “A/S” mode: Hold through the pitch axis of the IAS existing at the time of mode engagement. • “ALT” mode: Hold through the pitch axis of the baro-altitude existing at the time of mode engagement. This function is performed through the collective axis, when the “A/S” mode is active on the pitch axis. • “HDG” mode: Acquisition and hold through the roll axis of the heading bugged on the pilot or co-pilot HSI on PFD page as per selection of the HDG selection switch on the main instrument panel. • “NAV” mode: Acquisition and hold through the roll axis of a NAV route by means of the steering command signal supplied by the NAV system. • “H.HT + HOV” mode: When selected, this mode holds through the collective axis, the radio-height existing at the time of mode engagement. Also it acquires and holds zero doppler velocities (longitudinal & lateral) through the cyclic axes. • AFCS Computer • The digital AFCS computer is responsible for performance of all functions and features of the autopilot. • Pilot Control Unit (PCU) • The function of the PCU is to interface the crew and the flight control subsystem, for controls and displays for basic stabilization, upper modes, preflight test, maintenance function, and trim reconfiguration. PCU failure messages are displayed on PCU window, Air Data Unit (ADU) • The ADU is pneumatically connected to the total and static pressure probes and is electrically connected to the total temperature probe, the AHRS and the IADS. The ADU measures the anemo-barometric data and transmits these to the user systems through • two low speed ARINC 429 digital links. Attitude Heading Reference System (AHRS) • • • • There are two AHRSs. Each AHRS comprises the following: a) Integrated Sensor unit (ISU) b) Magnetometer The Integrated Sensor unit (ISU) consists of 3 Fiber Optic Gyro (FOG) based rate gyros and 3 accelerometers in perpendicular directions. • The ISU receives magnetic heading from external magnetometer, receives speed (indicated airspeed and true air speed) and • baro altitude inputs from Air Data Units. ISU internally uses TAS information to improve the attitude and rate information. • ISU outputs through ARINC 429 high-speed digital link, the pitch and roll attitudes, heading, three axes rates, acceleration in three axes, baro altitude and indicated airspeed. Vertical Gyro: • The Vertical Gyro, which is installed on the nose equipment platform, provides pitch and • roll attitudes to the AFCS, as the back-up source. Navigation System • • IADS provides the following navigation system output to AFCS: • a. Roll steering command, • b. Longitudinal ground speed (Vx) • c. Lateral ground speed (Vy) AFCS Annunciator Strip • The AFCS annunciator strip on the IADS-PFD page indicates failure and auto pilot modes status indication. • Trouble shooting of afcs system can be done by the following inputs • Pilot SNAG REPORT • PCU ERROR MESSAGE • PCU MAINTENANCE CODES • PRE- TEST ON GROUND SPECIAL TOOL –DTS COMPUTER