ELEC ENG 3101 Control
ELEC ENG 7082 Principles of Control Systems
In-Class Test 2 Sample
Total Duration:
45 minutes
Permitted Materials: Calculator; One A4 single-sided sheet with own notes.
Total Mark:
12 marks
There are 12 questions (child questions) distributed within 3 main questions,
each question worth 1 mark.
Question 1 [2 marks] (Dominant poles)
Consider the following loop transfer function and unity negative feedback:
𝐿𝐿(𝑠𝑠) =
200
𝑠𝑠(𝑠𝑠 2 + 44𝑠𝑠 + 165)
200
1.1 – Show that the transfer function of the closed-loop system is 𝑇𝑇(𝑠𝑠) =
(𝑠𝑠 + 40)(𝑠𝑠 2 + 4𝑠𝑠 + 5)
and determine the poles of 𝑇𝑇(𝑠𝑠).
1.2 – For the given third-order system 𝑇𝑇(𝑠𝑠), is the step response underdamped, overdamped, or
critically damped, and explain why based on the pole locations and their dominance? Refer to
Topic 1 - Dominant Poles (in Test 2 Review)
Question 2 [2 marks] (Transfer function and state space model)
Consider the differential equation of
9 𝑑𝑑 3 𝑦𝑦(𝑡𝑡)
𝑑𝑑 2 𝑦𝑦(𝑡𝑡) 90 𝑑𝑑𝑑𝑑(𝑡𝑡)
4.5 𝑑𝑑𝑑𝑑(𝑡𝑡)
𝑑𝑑 2 𝑢𝑢(𝑡𝑡)
+ 18
+
+ 45𝑦𝑦(𝑡𝑡) = 54𝑢𝑢(𝑡𝑡) +
+9
7 𝑑𝑑𝑡𝑡 3
𝑑𝑑𝑡𝑡 2
14 𝑑𝑑𝑑𝑑
7 𝑑𝑑𝑑𝑑
𝑑𝑑𝑡𝑡 2
representing the dynamic of a linear system.
𝑌𝑌(𝑠𝑠)
2.1 – Using the Laplace transform, find the transfer function 𝐺𝐺(𝑠𝑠) = 𝑈𝑈(𝑠𝑠) of this system,
given ℒ {𝑦𝑦(𝑡𝑡)} = 𝑌𝑌(𝑠𝑠), ℒ {𝑢𝑢(𝑡𝑡)} = 𝑈𝑈(𝑠𝑠), ℒ �𝑦𝑦̇ (𝑡𝑡) =
𝑑𝑑𝑑𝑑(𝑡𝑡)
𝑑𝑑𝑑𝑑
� = 𝑠𝑠𝑠𝑠(𝑠𝑠).
2.2 – Obtain a state space model of the system above using phase variables, where y
is the output, 𝑢𝑢 is the input. Refer to Topic 4 – Canonical forms (Test 2 Review).
Question 3 [3 marks] (Rough-Hurwitz stability criterion)
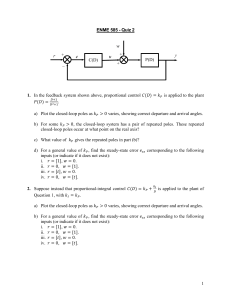
3.1 – Consider the following feedback control system:
R(s)
+_
1
𝑠𝑠(𝑠𝑠 − 3)
𝐾𝐾𝑝𝑝 + 𝐾𝐾𝑑𝑑 𝑠𝑠
Y(s)
(a) Using the Routh-Hurwitz stability criterion to find the range of 𝐾𝐾𝑑𝑑 and 𝐾𝐾𝑝𝑝 for the stability
of the closed-loop system. 𝐾𝐾𝑑𝑑 > 3. 𝑥𝑥𝑥𝑥 and 𝐾𝐾𝑝𝑝 > 0
(b) Choose a value of 𝐾𝐾𝑝𝑝 , determine 𝐾𝐾𝑑𝑑 to obtain the following performance:
The output response to the unit step input has 4.32% maximum peak, i.e. the percent
2
overshoot (P.O.) is 4.32, given P.O. = 100 𝑒𝑒 −𝜋𝜋𝜋𝜋/�1−𝜁𝜁 . Similar to Test 1.
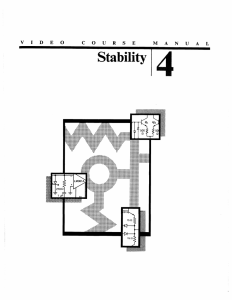
3.2 – Consider the following feedback control system:
1
(0.45𝑠𝑠 + 1)(𝑠𝑠 + 1.5)
𝐾𝐾
𝑠𝑠 + 1.5
1
0.007𝑠𝑠 + 1
Find the range of 𝐾𝐾 for the stability of the closed-loop system. Answer: -2.xx < K < 18.xx
Question 4 [3 marks] (Optimal control with LQR design)
The following state space model is used in a position control application:
𝒙𝒙̇ (𝑡𝑡) = �
−0.8
0.8
0
2.5
� 𝒙𝒙(𝑡𝑡) + � � 𝑢𝑢(𝑡𝑡), 𝑦𝑦(𝑡𝑡) = [0 1]𝒙𝒙(𝑡𝑡).
0
0
The controllability matrix [𝑩𝑩 𝑨𝑨𝑨𝑨] = �2.5 −2� has full rank of 2 with the determinant being non-zero.
0
2
Consider the full state-feedback optimal control law 𝑢𝑢(𝑡𝑡) = −𝑲𝑲𝑲𝑲(𝑡𝑡) that minimise the cost function
∞
𝐽𝐽 = � (𝒙𝒙𝑇𝑇 𝑸𝑸𝑸𝑸 + 𝑢𝑢𝑇𝑇 𝑹𝑹𝑢𝑢)𝑑𝑑𝑑𝑑
0
with 𝑸𝑸 = �1
0
� and two cases of 𝑹𝑹 = [1.3] and 𝑹𝑹 = [3], 𝑲𝑲 = 𝑹𝑹−𝟏𝟏 𝑩𝑩𝑻𝑻 𝑷𝑷, where 𝑷𝑷 is the solution to
0 1.5
the algebraic Riccatti equation as follows:
(i) 𝑷𝑷 = �0.4357 0.4523� when 𝑹𝑹 = [1.3], and (ii) 𝑷𝑷 = �0.3746 0.3394� when 𝑹𝑹 = [3].
0.4523
1.1307
0.3394
0.8485
4.1 – Determine the state feedback gain 𝑲𝑲 for the two cases of 𝑹𝑹 above (𝑲𝑲 = 𝑹𝑹−𝟏𝟏 𝑩𝑩𝑻𝑻 𝑷𝑷). Use ChatGPT.
4.2 – Using the characteristic equation det(𝑠𝑠𝑰𝑰 − 𝑨𝑨 + 𝑩𝑩𝑩𝑩) = 0 of the closed-loop system to find the
𝑎𝑎 𝑏𝑏
two poles for the two cases of 𝑲𝑲 in (a), noting that det �
� = 𝑎𝑎𝑎𝑎 − 𝑏𝑏𝑏𝑏. Use ChatGPT.
𝑐𝑐 𝑑𝑑
4.3 – Are the transient responses underdamped or overdamped? Underdamped if complex conjugate
poles, overdamped if real poles.
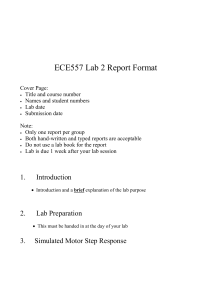
4.4 – If the state vector 𝒙𝒙(𝑡𝑡) is not available for the control law 𝑢𝑢(𝑡𝑡) = −𝑲𝑲𝑲𝑲(𝑡𝑡), the following full state
observer has been derived by Luenberger for the state-space system above:
𝑢𝑢(𝑡𝑡)
�.
𝑦𝑦(𝑡𝑡)
(a) Rewrite the state space model of the observer in the block diagram with the input vector of �
(b)
𝑢𝑢(𝑡𝑡)
�̇ (𝑡𝑡) = (𝑨𝑨 − 𝑳𝑳𝑳𝑳)𝒙𝒙
� (𝑡𝑡) + [𝑩𝑩 𝑪𝑪] �
𝒙𝒙
�
𝑦𝑦(𝑡𝑡)
What should the settling time of the observer be relatively to the settling time of the statefeedback closed-loop system? – At least half, one fifth is even better.
 0
0