Uploaded by
Siobhan Surban Black
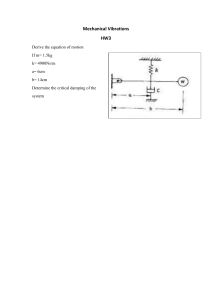
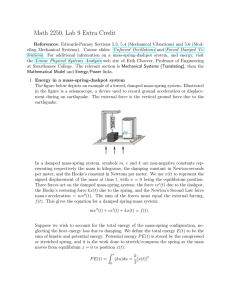
Free & Damped Vibrations Summary: Equations & Formulas
advertisement

Summary of Free Undamped Vibrations 1. Key Concept: Free Undamped Vibrations What is Free Vibration? Free vibration occurs when a system oscillates naturally after being displaced from its equilibrium position without any external forces acting on it (e.g., no driving forces, no damping). The system continues oscillating indefinitely as long as there’s no energy loss, meaning no damping is involved. In the mass-spring system, the restoring force (spring) causes the mass to oscillate. The motion is simple harmonic (i.e., sinusoidal) and determined by the system's natural frequency. Key Points to Remember: The system is assumed to be undamped (no energy loss). The oscillations are determined solely by the system’s stiffness and mass. 2. The Equation of Motion for Free Undamped Vibrations For a mass-spring system, the general equation of motion is: ¨ m x + k x=0 Where: m = mass (kg) x = acceleration (second derivative of displacement x (t ) , m/s ) k = spring stiffness (N/m) ¨ 2 x (t ) = displacement (m) This is a second-order linear differential equation that governs the vibration of the system. Key Concept: This equation describes the motion of an object where the displacement is proportional to the restoring force from the spring, and there are no external forces or energy losses. 3. The General Solution to the Equation of Motion ¨ The solution to the equation m x + k x=0 is: x (t )=C sin ( ω n t+ ψ ) Where: C = amplitude of the motion (depends on initial displacement) ω n = natural frequency (rad/s), given by: ω n= √ k m ψ = phase angle (depends on initial velocity and displacement) 4. Period and Frequency of the Vibration Period T is the time taken for the system to complete one full oscillation: T= 2π ωn Frequency f n is the number of oscillations per second: 1 ωn f n= = T 2π This tells you how fast the system oscillates. The natural frequency ω n is inversely related to the period T . 5. Initial Conditions To fully solve the motion, we need initial conditions, which are usually given: Displacement at t=0 : x ( 0 )=x 0 Velocity at t=0 : x ( 0 )=v 0 ˙ From these initial conditions, we can find C and ψ : √ () v0 2 C= x + ωn ψ=tan 2 0 −1 ( ) x 0 ωn v0 These formulas help you solve the system’s exact displacement at any point in time. 6. Spring Stiffness The key factor governing the motion of the system is the spring stiffness k . Here, we’ll review different types of spring stiffness and their formulas, which are crucial for the exam. A. Linear Spring Stiffness For most mass-spring systems, the spring stiffness is defined as: k= F Δx Where: F = Force applied (N) Δ x = Displacement from equilibrium (m) This is a simple linear spring, where the stiffness k is constant. B. Helical Spring Stiffness (For torsion) For a helical spring (one that twists under load), the stiffness k is given by: 4 k= Gd 3 64 n R Where: G = shear modulus (N/m²) (material property) d = diameter of the wire (m) n = number of turns in the spring R = radius of the spring (m) This equation describes how much torsional resistance a helical spring offers when twisted. C. Beam Axial Stiffness For a beam under axial load (compression or extension), the stiffness is given by: k= EA l Where: E = Young’s modulus (N/m²) (material property) A = cross-sectional area of the beam (m²) l = length of the beam (m) This formula describes the axial stiffness of a beam — how much the beam resists deformation along its length. D. Torsional Stiffness (for rotating shafts) For a shaft subject to torsion (twisting), the stiffness k is: k= G Jp l Where: G = shear modulus (N/m²) J p = polar moment of inertia of the beam's cross-section (m⁴) l = length of the shaft (m) This is used when dealing with rotational vibration problems, where you need to account for twisting of the shaft. E. Beam Transverse Stiffness (Bending) When a beam is subjected to bending (perpendicular force), its stiffness is: k= 3EI 3 l Where: E = Young’s modulus (N/m²) I = second moment of area (or area moment of inertia) of the beam’s cross-section (m⁴) l = length of the beam (m) This formula gives us the resistance of a beam to bending under an applied force. 7. Springs in Series and Parallel When multiple springs are involved, they can be combined in series or parallel. A. Springs in Series For springs in series (connected end to end), the equivalent stiffness is: 1 1 1 = + k eq k 1 k 2 This means the effective stiffness is lower than that of any individual spring. B. Springs in Parallel For springs in parallel (connected side by side), the equivalent stiffness is: k eq=k 1+ k 2 This means the effective stiffness is the sum of the individual spring constants. 8. Energy Considerations In free undamped vibrations, the total mechanical energy (kinetic + potential energy) remains constant because there is no energy loss due to damping. The energy simply oscillates between kinetic energy (due to velocity) and potential energy (due to the spring's compression/extension). 9. Summary of Key Formulas to Learn for the Exam Formulas Given in the Exam Formula Sheet: Natural frequency ω n=√ k /m 2π Period T = ω n ωn Frequency f n= 2π Formulas You Need to Derive/Understand (Not on the Sheet): General solution for displacement x (t )=C sin ( ω n t+ ψ ) Initial condition solutions: √ () ( ) v0 2 −1 x 0 ωn C= x + , ψ=tan ωn v0 2 0 Combination of Springs: 1 1 1 o Series: k = k + k eq 1 2 o Parallel: k eq=k 1+ k 2 4 Gd Helical spring stiffness: k = 3 64 n R Beam axial stiffness: k = Torsional stiffness: k = Beam bending stiffness: k = EA l G Jp l 3EI 3 l 10. Conclusion Free undamped vibration is all about mass-spring systems and understanding how they oscillate at a natural frequency ω n=√ k /m . Springs in series and parallel are crucial for problems involving multiple springs. Make sure to memorize the key spring stiffness formulas (axial, torsional, beam) and be able to recognize when to use each one in the context of a problem. The initial condition solutions and energy conservation are vital when you need to fully describe the motion of the system. Summary of Free Damped Vibrations for the Exam Key Concepts in Free Damped Vibrations In free damped vibrations, damping forces are introduced, which causes energy loss and results in a decreasing amplitude over time. This is contrasted with free undamped vibrations, where the oscillation continues indefinitely with constant amplitude. Damping Force: The damping force is proportional to the velocity and acts in the opposite direction: ˙ f c =− c x ( t ) Where: o c = damping coefficient (N·s/m) ˙ o x (t ) = velocity (m/s) Equation of Motion for Damped Free Vibration The general equation of motion for a damped system is: ¨ ˙ m x ( t )+ c x ( t ) + k x ( t )=0 Where: m = mass (kg) x (t ) = acceleration (m/s²) c = damping coefficient (N·s/m) ¨ k = spring stiffness (N/m) x (t ) = displacement (m) x (t ) = velocity (m/s) ˙ This is a second-order linear differential equation that governs the motion of the system. Damping Ratio ζ and Types of Damping The behavior of the system is determined by the damping ratio ζ : ζ= c 2 √k m Where: c = damping coefficient (N·s/m) k = spring stiffness (N/m) m = mass (kg) Types of Damping: 1. Underdamped (ζ < 1): The system oscillates with exponentially decaying amplitude. 2. Critically Damped (ζ =1): The system returns to equilibrium without oscillating in the shortest possible time. 3. Overdamped (ζ > 1): The system decays without oscillation but at a slower rate. Solution for Underdamped Vibration For underdamped systems, the displacement is given by: x (t )= A 1 e − ζ ωn t cos ( ω d t ) + A 2 e − ζ ωn t sin ( ωd t ) Where: A1, A2 = constants determined by initial conditions ω n=√ k /m = natural frequency (rad/s) ω d=ωn √ 1 − ζ 2 = damped natural frequency (rad/s) The motion decays exponentially with the factor e −ζ ω t , while oscillating at the damped frequency ω d. n Damped Natural Frequency and Period The damped natural frequency is defined as: ω d=ωn √ 1 − ζ 2 And the damped period is: T d= 2π ωd The system oscillates at a lower frequency than the undamped system due to damping. Logarithmic Decrement Method (for Lightly Damped Systems) For lightly underdamped systems, you can estimate the damping ratio ζ using the logarithmic decrement method: 1. Measure the amplitude ratio between successive peaks (at t 0 and t n): ( ) x (t 0) 1 δ= ln n x (t n) 2. The damping ratio ζ can then be estimated as: ζ= δ √ 4 π 2+ δ 2 For small damping (ζ ≈ δ /2 π ). This formula allows for experimental determination of damping from the decay of oscillations. It's important to understand how to use this method for measuring damping in practical systems, especially in light damping cases. Important Equations for the Exam Given in the Exam Formula Sheet: 1. Equation of Motion for Damped Free Vibration: ¨ ˙ m x ( t )+ c x ( t ) + k x ( t )=0 2. Damping Ratio: ζ= 3. Damped Natural Frequency: c 2 √k m ω d=ωn √ 1 − ζ 2 4. Solution for Underdamped Vibration: x (t )= A 1 e − ζ ωn t cos ( ω d t ) + A 2 e − ζ ωn t sin ( ωd t ) Not on the Formula Sheet (but should be memorized): 1. Logarithmic Decrement and Damping Ratio: ( ) x (t 0) 1 δ δ= ln ,ζ= n 2π x (t n) ζ= δ √ 4 π 2+ δ 2 Where δ is the logarithmic decrement. Relevant Concepts for the Exam 1. Sketching Responses for Different Damping Types: You may be asked to sketch or interpret the responses of the system for underdamped, critically damped, and overdamped motions. The general shape of the graph depends on the damping ratio ζ : o Underdamped: Oscillations with exponentially decaying amplitude. o Critically damped: Fastest return to equilibrium without oscillation. o Overdamped: Slow return to equilibrium without oscillation. 2. Estimating Damping Using the Logarithmic Decrement: For lightly underdamped systems, estimate damping using the logarithmic decrement method. This is important for experimental analysis and might be directly tested in your exam. Conclusion In preparation for the exam on free damped vibrations: Memorize the key equations: Understand how to apply them to solve for damping ratio ζ , damped natural frequency ω d, and displacement. Be able to sketch and describe responses for underdamped, critically damped, and overdamped systems. Practice using the logarithmic decrement method for estimating the damping ratio in practical applications. 1. Forced Vibrations In forced vibrations, a system is subject to an external force, causing it to oscillate. Unlike free vibrations, forced vibrations persist as long as the external force is applied. Key Equations for Forced Vibrations (Given in the Exam Formula Sheet) Undamped Forced Vibration: ¨ m x + ω2n x= F 0 sin ( ω t ) m Where: o ω n is the natural frequency, o F 0 is the amplitude of the external force, o ω is the driving frequency, o x (t ) is the displacement in the system. The solution for the displacement x (t ) is: x p (t )= X sin ( ω t ) Where: o X= F 0 /k is the amplitude. 2 1 − ( ω/ω n ) Damped Forced Vibration: ¨ ˙ m x +2 ζ ω n x +ω 2n x= F 0 sin ( ω t ) m Where: o ζ is the damping ratio. o X= F0 /k 2 ( 1− ω2 /ω 2n ) + ( 2 ζ ω /ωn )2 o The phase angle ϕ is: 1/ 2 is the displacement amplitude. ϕ=tan −1 ( ( 2 ζ ω /ωn 2 1 − ω/ω n ) ) The Magnification Factor M is: M= 1 √( 1 − ( ω /ω ) ) +( 2 ζ ω /ω ) 2 2 2 n n This factor shows the amplification of the system's response as it nears resonance. Rotating Machine Unbalance: m0 e ω 2r sin ( ωr t ) m x +2 ζ ω n x +ω x= m ¨ ˙ 2 n Where: o m0 is the unbalanced mass, o e is the eccentricity, o ω r is the rotational frequency. The solution for displacement and phase angle is similar to the general damped forced vibration equations, but adjusted for the rotating unbalance. Seismometers and Accelerometers: These devices measure forced vibrations in buildings or other structures. The equation is: ¨ ˙ 2 m x +2 ζ ω n x +ω n x= 2 bω sin ( ω t ) m Where: o b is a constant related to the measuring device. Concepts to Remember for Forced Vibrations: 1. Resonance: Occurs when the driving frequency ω matches the natural frequency ω n, causing the system's amplitude to grow large. The Magnification Factor M describes this behavior. 2. Damping: Helps control resonance and reduce vibration amplitude. The damping ratio ζ plays a critical role in system design. 2. Rigid Body Vibrations In rigid body vibrations, we study the motion of entire bodies that rotate and oscillate in space. These vibrations are critical in engineering when analyzing rotating machinery, beams, or shafts. Key Concepts for Rigid Body Vibrations: Rotation: Unlike particle motion, rigid bodies can rotate, and we focus on angular displacement. Moment of Inertia: In rotational dynamics, the moment of inertia I 0 is analogous to mass in linear motion. It resists changes in rotational velocity. Key Equation for Rigid Body Vibrations (involving rotational motion): The equation of motion for a rigid body undergoing rotational vibration is: ¨ ˙ I 0 θ + c θ + k θ=F 0 cos ( ω t ) Where: θ is the angular displacement, I 0 is the moment of inertia of the body, c is the damping coefficient, k is the spring constant, ω is the driving frequency. Moment of Inertia (for a bar): 1 2 I 0= m l 9 Where: m is the mass of the bar, l is the length of the bar. This formula is essential for calculating the system's resistance to rotational motion. Concepts to Remember for Rigid Body Vibrations: 1. Rotational Motion: The dynamics of rigid body vibrations are governed by rotational motion, which involves angular displacement, velocity, and acceleration. 2. Moment of Inertia: The moment of inertia plays a central role in how the body resists angular acceleration. Larger I 0 means the body resists rotation more. Summary of Formulas to Memorize: Forced Vibrations: 1. Undamped Forced Vibration: ¨ m x + ω2n x= F 0 sin ( ω t ) m 2. Damped Forced Vibration: ¨ ˙ m x +2 ζ ω n x +ω 2n x= ϕ=tan M= −1 F 0 sin ( ω t ) m ( ( 2 ζ ω /ωn 2 1 − ω/ω n ) ) 1 √( 1 − ( ω /ω ) ) +( 2 ζ ω /ω ) 2 2 2 n n 3. Rotating Machine Unbalance: 2 m0 e ω r sin ( ωr t ) m x +2 ζ ω n x +ω x= m ¨ ˙ 2 n 4. Seismometers & Accelerometers: ¨ ˙ 2 m x +2 ζ ω n x +ω n x= 2 bω sin ( ω t ) m Rigid Body Vibrations: 1. Equation of Motion: ¨ ˙ I 0 θ + c θ + k θ=F 0 cos ( ω t ) 2. Moment of Inertia: 1 2 I 0= m l 9 Key Exam Preparation Tips: Resonance and Damping: Understand how resonance occurs when the driving frequency matches the system's natural frequency. The damping ratio ζ is crucial for reducing resonance and controlling vibration amplitudes. Practice Solving Forced Vibration Problems: Focus on problems involving undamped and damped forced vibrations, systems with unbalanced rotating masses, and vibrating sensors. Rigid Body Vibration Analysis: Understand how to calculate angular displacement and use the moment of inertia in rotational systems. Be able to apply the equation of motion for rotating bodies. Review Practical Applications: Know how these concepts apply in realworld systems such as rotating machinery, seismometers, and accelerometers. Conclusion: This summary covers the critical formulas and concepts for forced vibrations and rigid body vibrations. Make sure you understand the theoretical concepts, memorize the key formulas, and practice solving problems to apply these concepts effectively.