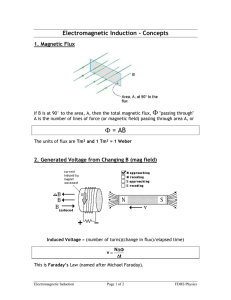
MTS 231 Actuating System Dr. Basharat Ullah Week 02 Department of Mechatronics College of Electrical and Mechanical Engineering Energy Losses in a Ferromagnetic Core Let us now apply an alternating current (AC) to a coil and observe what happens. Assume that the flux in the core is initially zero. The core is ‘perfect’ i.e. there are no residual flux present during the negative cycle of the ac current flow f 1st Positive Cycle 2nd Negative Cycle F Energy Losses in a Ferromagnetic Core As the current increases for the first time, the flux in the core traces out path ab. This is basically the saturation curve. As the current decreases, the flux in the core traces out path bcd. When the current increases again, the flux traces out path deb. Notice that the amount of flux present in the core depends not only on the amount of current applied to the windings of the core, but also on the previous history of the flux in the core. Energy Losses in a Ferromagnetic Core This dependence on the preceding flux history and the resulting failure to retrace flux paths is called hysteresis. Path bcdeb traced out in Figure as the applied current changes is called a hysteresis loop. When mmf is removed, the flux does not go to zero. A magnetic field is left in the core, called the residual flux. This is how permanent magnets are produced. To force the flux to zero, an amount of mmf known as the coercive mmf ( ℱ𝑐 ) must be applied to the core in the opposite direction. Why does hysteresis occur? To understand hysteresis in a ferromagnetic core, we have to look into the behavior of its atomic structure before, during and after the presence of a magnetic field. The atoms of iron and similar metals tend to have their magnetic fields closely aligned with each other. Within the metal, there is an existence of small regions known as domains where in each domain there is a presence of a small magnetic field which randomly aligned through the metal structure. Why does hysteresis occur? An example of a magnetic domain orientation in a metal structure before the presence of a magnetic field. When mmf is applied to the core, each magnetic field will align with respect to the direction of the magnetic field. As more and more domain are aligned to the magnetic field, the increase in total magnetic flux will reduce and maintain at a constant level (saturation). When mmf is removed, the magnetic field in each domain will try to revert to its random state. However, not all magnetic field domain’s would revert to its random state hence it remained in its previous magnetic field position. Why does hysteresis occur? Hence the material will retain some of its magnetic properties (permanent magnet) up until an external energy is applied. Examples of external energy may be in the form of heat or large mechanical shock. That is why a permanent magnet can lose its magnetism if it is dropped, hit with a hammer or heated. Therefore, in an AC current situation, to realign the magnetic field in each domain during the opposite cycle would require extra mmf (coercive mmf). This extra energy requirement is known as hysteresis loss. The larger the material, the more energy is required hence the higher the hysteresis loss. FARADAY’S LAW – Induced Voltage Faraday's First Law: Whenever a conductor is placed in a varying magnetic field an EMF gets induced across the conductor (called as induced emf), and if the conductor is a closed circuit, then induced current flows through it. Magnetic field can be varied by various methods o By changing magnetic flux o By moving the magnet o By rotating the coil relative to magnetic field Faraday's Second Law: If a flux passes through a turn of a coil of wire, a voltage will be induced in the turn of wire that is directly proportional to the rate of change in the flux with respect to time. df eind dt df eind N dt FARADAY’S LAW – Induced Voltage df eind N dt The negative sign in above equation, is in accordance with Lenz’ Law. Lenz’ Law: The direction of the voltage buildup in the coil is such that if the coils were short circuited, it would produce current that would cause a flux opposing the original flux change. If the flux is increasing in strength, then the voltage built up in the coil will tend to establish a flux that will oppose the increase. NOTE: In Chapman, the minus sign is left out because the polarity of the resulting voltage can be determined from physical considerations. FARADAY’S LAW – Induced Voltage Practical considerations df eind N dt Above equation assumes that exactly the same flux is present in each turn of the coil. This is not true, since there is leakage flux. This equation will give valid answers if the windings are tightly coupled, so that the vast majority of the flux passing through one turn of the coil does indeed pass through all of them. If leakage is quite high or if extreme accuracy is required then a different expression without assumption is required. FARADAY’S LAW – Induced Voltage Practical considerations Now consider the induced voltage in the ith turn of the coil, Since there are N turns in the coil, so; The term in parentheses is called the flux linkage λ of the coil. FARADAY’S LAW – Induced Voltage Practical considerations Faraday’s law can be rewritten in terms of flux linkage as Where Faraday’s law is the fundamental property of magnetic fields involved in transformer operation. Lenz’s Law in transformers is used to predict the polarity of the voltages induced in transformer windings. Eddy Current Losses A time-changing flux induces voltage within a ferromagnetic core. These voltages cause swirls of current to flow within the core – eddy currents. Energy is dissipated (in the form of heat) because these eddy currents are flowing in a resistive material (iron). The amount of energy lost to eddy currents is proportional to the size of the paths they follow within the core. To reduce energy loss, ferromagnetic core should be broken up into small strips, or laminations, and build the core up out of these strips. Eddy Current Losses The second approach to reducing eddy current losses is to increase the resistivity of the core material. Together, they can reduce the eddy current losses to the point where they are much smaller than the hysteresis losses in the core. Eddy current Losses in machines Eddy currents occur when a solid metallic mass is rotated in a magnetic field, because the outer portion of the metal cuts more lines of force than the inner portion. Hence the induced electromotive force not being uniform, tends to set up currents between the points of greatest and least potential. Production of Induced Force on a Wire A current-carrying conductor/wire present in a uniform magnetic field of flux density B, would produce a force on the conductor/wire. Dependent upon the direction of the surrounding magnetic field, the force induced is given by; F i l B where i = magnitude of current in wire l = length of wire, in the direction of current flow B = magnetic flux density vector x = cross product Production of Induced Force on a Wire The direction of the force is given by the right-hand rule. Right-Hand Rule: If the index finger of the right hand points in the direction of the vector l and the middle finger points in the direction of the vector B, then the thumb points in the direction of resultant force F on the wire. The magnitude of the force is given by F i l B F ilB sin Example 1.7 The figure shows a wire carrying a current in the presence of a magnetic field. The magnetic flux density is 0.25T, directed into the page. If the wire is 1m long and carries 0.5A of current in the direction from the top of the page to the bottom, what are the magnitude and direction of the force induced on the wire? Solution: The direction of the force is given by the right-hand rule as being to the right. The magnitude is given by Therefore 𝐹 = 0.125𝑁 , directed to right is exerted. The induction of a force in a wire by a current in the presence of a magnetic field is the basis of motor action. Induced Voltage on a Conductor Moving in a Magnetic Field If a wire with the proper orientation moves through a magnetic field, a voltage is induced in it. The induced voltage is dependent upon the velocity of the wire assuming that the magnetic field is constant. This can be summarized in terms of formulation as shown: 𝑒𝑖𝑛𝑑 = (𝒗 𝑩) · 𝒍 where: v – velocity of the wire B – magnetic field density l – length of the wire in the magnetic field · – dot product Induced Voltage on a Conductor Moving in a Magnetic Field Note: The value of l (length) is dependent upon the angle at which the wire cuts through the magnetic field. Hence a more complete formula will be as follows: 𝑒𝑖𝑛𝑑 = (𝒗 𝑩) · 𝒍 𝑒𝑖𝑛𝑑 = (𝒗 𝑩)𝑙 𝑐𝑜𝑠 Where - angle between the conductor and the direction of (v B) Note: The induction of voltages in a wire moving in a magnetic field is fundamental to the operation of all types of generators. Example 1.8 The figure shows a conductor moving with a velocity of 5m/s to the right in the presence of a magnetic field. The flux density is 0.5T into the page, and the wire is 1m length, oriented as shown. What are the magnitude and polarity of the resulting induced voltage? Solution: Thus, the induced voltage is 2.5 V, positive at the top of the wire. Example 1.9 Figure shows a conductor moving with a velocity of 10 m/s to the right in a magnetic field. The flux density is 0.5 T, out of the page, and the wire is 1.0 m in length, oriented as shown. What are the magnitude and polarity of the resulting induced voltage? Solution: Sinusoid An ac signal is expressed as 2𝜋𝑡 𝑥 𝑡 = 𝑋𝑚 sin = 𝑋𝑚 sin 2𝜋𝑓𝑡 𝑇 Where x(t) = instantaneous value of the signal Xm = Amplitude T = Period f = frequency f is the number of oscillations in one second Sinusoid Angular Frequency 2𝜋𝑡 𝑥 𝑡 = 𝑋𝑚 sin = 𝑋𝑚 sin 2𝜋𝑓𝑡 𝑇 𝟐𝝅𝒕 𝒙 𝒕 = 𝑿𝒎 𝒔𝒊𝒏 = 𝑿𝒎 𝒔𝒊𝒏 𝟐𝝅𝒇𝒕 = 𝑿𝒎 sin 𝝎𝒕 𝑻 Note: To avoid confusion, f is also known as cyclical frequency or ordinary frequency Sinusoid Phase Angle As we know 𝒙 𝒕 = 𝑿𝒎 sin 𝝎𝒕 As, 𝑆𝑖𝑛(0) = 0, so waveform passes through origin This means 𝒙 𝒕 = 𝑿𝒎 sin 𝝎𝒕 always passes through origin We need additional parameter 𝒙 𝒕 = 𝑿𝒎 sin 𝝎𝒕 + 𝜃 θ is the phase angle, because of the presence of the phase angle, any point on the waveform 𝒙 𝒕 = 𝑿𝒎 sin 𝝎𝒕 + 𝜃 occurs θ radians earlier in time than the corresponding point on the waveform 𝒙 𝒕 = 𝑿𝒎 sin 𝝎𝒕. Phasors Phasor: A graphical way of representing the magnitude and directional relationship between two or more alternating quantities. In rectangular form In polar form 𝑉 = 𝑉𝑚 ∠𝜃 or 𝑋 = 𝑋𝑚 ∠𝜃 Phasors The length of phasor X , also called modulus or magnitude of X is non-negative by definition and denoted by 𝑋 = 𝑋𝑚 The angle of phasor X, also called the argument of X is denoted as ∢𝑋 and is always measured counterclockwise relative to the positive horizontal axis, as indicated by arrow ∢X = θ Correspondence between ac signal and its phasor Note: Phasors look like vector but don’t obey vector analysis rules. AC Response of basic circuit elements Resistor Capacitor Inductor AC Response of Resistor AC Response of basic circuit elements AC Response of a Capacitor Voltage and Current amplitudes are linearly proportional. Current always leads voltage by 90°. AC Response of basic circuit elements AC Response of an Inductor Voltage and Current amplitudes are linearly proportional. Current always lags voltage by 90°. AC Rule for Inductance Impedance Impedance (symbol Z) is a measure of the overall opposition of a circuit to current. It is like resistance, but it also takes into account the effects of capacitance and inductance. Impedance is measured in ohms (ohm). The effects of capacitance and inductance vary with the frequency of the current passing through the circuit and this means impedance varies with frequency. The capacitance and inductance cause a phase shift between the current and voltage. θ gives the phase difference between voltage and current