578
CHAPTER 10
VECTORS AND THE GEOMETRY OF SPACE
TEC In Module 10.6B you can see how
changing a, b, and c in Table 1 affects the
shape of the quadric surface.
The idea of using traces to draw a surface is employed in three-dimensional graphing software for computers. In most such software, traces in the vertical planes x ! k
and y ! k are drawn for equally spaced values of k, and parts of the graph are eliminated using hidden line removal. Table 1 shows computer-drawn graphs of the six
basic types of quadric surfaces in standard form. All surfaces are symmetric with
respect to the z-axis. If a quadric surface is symmetric about a different axis, its equation changes accordingly.
TABLE 1
Surface
Graphs of Quadric Surfaces
Equation
x2
y2
z2
!1
2 !
2 !
a
b
c2
All traces are ellipses.
If a ! b ! c, the ellipsoid is
a sphere.
Ellipsoid
z
y
x
z
y2
x2
! 2 ! 2
c
a
b
Horizontal traces are ellipses.
Vertical traces are parabolas.
The variable raised to the
first power indicates the axis
of the paraboloid.
z
Equation
Cone
z
x
Elliptic Paraboloid
x
Surface
y
Hyperboloid of One Sheet
z
x
y
z2
x2
y2
2 !
2 !
c
a
b2
Horizontal traces are ellipses.
Vertical traces in the planes
x ! k and y ! k are
hyperbolas if k " 0 but are
pairs of lines if k ! 0.
t
x2
y2
z2
! 2 " 2 !1
2
a
b
c
Horizontal traces are ellipses.
Vertical traces are hyperbolas.
The axis of symmetry
corresponds to the variable
whose coefficient is negative.
I
y
Hyperbolic Paraboloid
z
y
z
x2
y2
! 2 " 2
c
a
b
Horizontal traces are
hyperbolas.
Vertical traces are parabolas.
The case where c # 0 is
illustrated.
Hyperboloid of Two Sheets
z
x
y
x2
y2
z2
" 2 ! 2 !1
2
a
b
c
Horizontal traces in z ! k are
ellipses if k $ c or k # "c.
Vertical traces are hyperbolas.
The two minus signs indicate
two sheets.
"
x
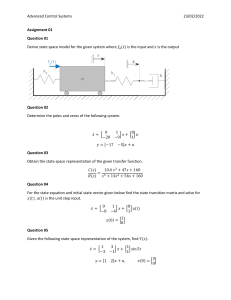
EXAMPLE 7 Classify the quadric surface x 2 ! 2z 2 " 6x " y ! 10 ! 0.
■
www.stewartcalculus.com
See Additional Example A.
=
SOLUTION By completing the square we rewrite the equation as
y " 1 ! !x " 3"2 ! 2z 2
Comparing this equation with Table 1, we see that it represents an elliptic paraboUnless otherwise noted, all content on this page is © Cengage Learning.
Copyright 2012 Cengage Learning. All Rights Reserved. May not be copied, scanned, or duplicated, in whole or in part. Due to electronic rights, some third party content may be suppressed from the eBook and/or eChapter(s).
Editorial review has deemed that any suppressed content does not materially affect the overall learning experience. Cengage Learning reserves the right to remove additional content at any time if subsequent rights restrictions require it.
SECTION 10.6
CYLINDERS AND QUADRIC SURFACES
579
loid. Here, however, the axis of the paraboloid is parallel to the y-axis, and it has
been shifted so that its vertex is the point !3, 1, 0". The traces in the plane y ! k
!k $ 1" are the ellipses
!x " 3"2 ! 2z 2 ! k " 1
y!k
The trace in the xy-plane is the parabola with equation y ! 1 ! !x " 3"2, z ! 0.
The paraboloid is sketched in Figure 10.
z
0
y
x
FIGURE 10
≈+2z@-6x-y+10=0
10.6
■
EXERCISES
1. (a) What does the equation y ! x 2 represent as a curve
2
in ! ?
(b) What does it represent as a surface in ! 3 ?
(c) What does the equation z ! y 2 represent?
2. (a) Sketch the graph of y ! e x as a curve in ! 2.
(b) Sketch the graph of y ! e x as a surface in ! 3.
(c) Describe and sketch the surface z ! e y.
3–8 ■ Describe and sketch the surface.
-
2n
T
3. x 2 ! z 2 ! 1
4. 4x 2 ! y 2 ! 4
5. z ! 1 " y 2
6. y ! z 2
7. xy ! 1
8. z ! sin y
..
9. (a) Find and identify the traces of the quadric surface
"
(3, 1, 0)
x 2 ! y 2 " z 2 ! 1 and explain why the graph looks like
the graph of the hyperboloid of one sheet in Table 1.
(b) If we change the equation in part (a) to
x 2 " y 2 ! z 2 ! 1, how is the graph affected?
(c) What if we change the equation in part (a) to
x 2 ! y 2 ! 2y " z 2 ! 0?
10. (a) Find and identify the traces of the quadric surface
"x 2 " y 2 ! z 2 ! 1 and explain why the graph looks
like the graph of the hyperboloid of two sheets in
Table 1.
(b) If the equation in part (a) is changed to
x 2 " y 2 " z 2 ! 1, what happens to the graph? Sketch
the new graph.
11–20 ■ Use traces to sketch and identify the surface.
.
11. x ! y 2 ! 4z 2 elliptic paraboloid12. 9x 2 " y 2 ! z 2 ! 0
13. x 2 ! y 2 ! 4z 2
14. 25x 2 ! 4y 2 ! z 2 ! 100
15. "x 2 ! 4y 2 " z 2 ! 4
16. 4x 2 ! 9y 2 ! z ! 0
17. 36x 2 ! y 2 ! 36z 2 ! 36
18. 4x 2 " 16y 2 ! z 2 ! 16
19. y ! z 2 " x 2
20. x ! y 2 " z 2
21–28 ■ Reduce the equation to one of the standard forms, classify the surface, and sketch it.
1
21. y 2 ! x 2 ! 9 z 2
22. 4x 2 " y ! 2z 2 ! 0
j
23. x 2 ! 2y " 2z 2 ! 0
24. y 2 ! x 2 ! 4z 2 ! 4
25. 4x 2 ! y 2 ! 4 z 2 " 4y " 24z ! 36 ! 0
26. 4y 2 ! z 2 " x " 16y " 4z ! 20 ! 0
27. x 2 " y 2 ! z 2 " 4x " 2y " 2z ! 4 ! 0
28. x 2 " y 2 ! z 2 " 2x ! 2y ! 4z ! 2 ! 0
29. Sketch the region bounded by the surfaces z ! sx 2 ! y 2
and x 2 ! y 2 ! 1 for 1 % z % 2.
Unless otherwise noted, all content on this page is © Cengage Learning.
Copyright 2012 Cengage Learning. All Rights Reserved. May not be copied, scanned, or duplicated, in whole or in part. Due to electronic rights, some third party content may be suppressed from the eBook and/or eChapter(s).
Editorial review has deemed that any suppressed content does not materially affect the overall learning experience. Cengage Learning reserves the right to remove additional content at any time if subsequent rights restrictions require it.
580
CHAPTER 10
VECTORS AND THE GEOMETRY OF SPACE
; 33. Graph the surfaces z ! x ! y and z ! 1 " y on a
30. Sketch the region bounded by the paraboloids
2
2
2
2
z ! x ! y and z ! 2 " x " y .
2
# #
common screen using the domain x % 1.2, y % 1.2
and observe the curve of intersection of these surfaces.
Show that the projection of this curve onto the xy-plane is
an ellipse.
31. Find an equation for the surface consisting of all points
that are equidistant from the point !"1, 0, 0" and the
plane x ! 1. Identify the surface.
32. Find an equation for the surface consisting of all points P
34. Show that the curve of intersection of the surfaces
x 2 ! 2y 2 " z 2 ! 3x ! 1 and 2x 2 ! 4y 2 " 2z 2 " 5y ! 0
lies in a plane.
for which the distance from P to the x-axis is twice the
distance from P to the yz-plane. Identify the surface.
10.7
2
# #
2
VECTOR FUNCTIONS AND SPACE CURVES
In general, a function is a rule that assigns to each element in the domain an element
in the range. A vector-valued function, or vector function, is simply a function whose
domain is a set of real numbers and whose range is a set of vectors. We are most interested in vector functions r whose values are three-dimensional vectors. This means
that for every number t in the domain of r there is a unique vector in V3 denoted by
r!t". If f !t", t!t", and h!t" are the components of the vector r!t", then f , t, and h are
real-valued functions called the component functions of r and we can write
r!t" ! $ f !t", t!t", h!t"% ! f !t" i ! t!t" j ! h!t" k
We use the letter t to denote the independent variable because it represents time in
most applications of vector functions.
EXAMPLE 1 If
r!t" ! $ t 3, ln!3 " t", st %
then the component functions are
f !t" ! t 3
t!t" ! ln!3 " t"
h!t" ! st
By our usual convention, the domain of r consists of all values of t for which the
expression for r!t" is defined. The expressions t 3, ln!3 " t", and st are all defined
when 3 " t $ 0 and t & 0. Therefore the domain of r is the interval &0, 3".
■
The limit of a vector function r is defined by taking the limits of its component
functions as follows.
1
If lim t l a r!t" ! L, this definition is
equivalent to saying that the length and
direction of the vector r!t" approach the
length and direction of the vector L.
If r!t" ! $ f !t", t!t", h!t"% , then
■
$
%
lim r!t" ! lim f !t", lim t!t", lim h!t"
tla
tla
tla
tla
provided the limits of the component functions exist.
Equivalently, we could have used an '-( definition (see Exercise 70). Limits of vector functions obey the same rules as limits of real-valued functions (see Exercise 69).
Unless otherwise noted, all content on this page is © Cengage Learning.
Copyright 2012 Cengage Learning. All Rights Reserved. May not be copied, scanned, or duplicated, in whole or in part. Due to electronic rights, some third party content may be suppressed from the eBook and/or eChapter(s).
Editorial review has deemed that any suppressed content does not materially affect the overall learning experience. Cengage Learning reserves the right to remove additional content at any time if subsequent rights restrictions require it.
SECTION 10.7
VECTOR FUNCTIONS AND SPACE CURVES
EXAMPLE 2 Find lim r!t", where r!t" ! !1 ! t 3 " i ! te"t j !
tl0
581
sin t
k.
t
SOLUTION According to Definition 1, the limit of r is the vector whose compo-
nents are the limits of the component functions of r:
&
'
&
'
(
lim r!t" ! lim !1 ! t 3 " i ! lim te"t j ! lim
tl0
tl0
!i!k
tl0
tl0
sin t
t
)
k
■
(by Equation 1.4.6)
A vector function r is continuous at a if
lim r!t" ! r!a"
tla
z
P { f(t), g(t), h(t)}
In view of Definition 1, we see that r is continuous at a if and only if its component
functions f , t, and h are continuous at a.
There is a close connection between continuous vector functions and space curves.
Suppose that f , t, and h are continuous real-valued functions on an interval I. Then
the set C of all points !x, y, z" in space, where
2
C
0
x
r(t)=kf(t), g(t), h(t)l
y
FIGURE 1
C is traced out by the tip of a moving
position vector r(t).
x ! f !t"
y ! t!t"
z ! h!t"
and t varies throughout the interval I, is called a space curve. The equations in 2 are
called parametric equations of C and t is called a parameter. We can think of C as
being traced out by a moving particle whose position at time t is ( f !t", t!t", h!t"). If
we now consider the vector function r!t" ! $ f !t", t!t", h!t"% , then r!t" is the position
vector of the point P ( f !t", t!t", h!t") on C. Thus any continuous vector function r
defines a space curve C that is traced out by the tip of the moving vector r!t", as shown
in Figure 1.
V EXAMPLE 3 Describe the curve defined by the vector function
r!t" ! $1 ! t, 2 ! 5t, "1 ! 6t %
TEC Visual 10.7A shows several curves
being traced out by position vectors,
including those in Figures 1 and 2.
SOLUTION The corresponding parametric equations are
x!1!t
y ! 2 ! 5t
z ! "1 ! 6t
which we recognize from Equations 10.5.2 as parametric equations of a line passing
through the point !1, 2, "1" and parallel to the vector $1, 5, 6% . Alternatively, we
could observe that the function can be written as r ! r0 ! tv, where r0 ! $1, 2, "1%
and v ! $1, 5, 6% , and this is the vector equation of a line as given by Equation 10.5.1.
■
Plane curves can also be represented in vector notation. For instance, the curve
given by the parametric equations x ! t 2 " 2t and y ! t ! 1 (see Example 1 in Section 9.1) could also be described by the vector equation
r!t" ! $t 2 " 2t, t ! 1% ! !t 2 " 2t" i ! !t ! 1" j
where i ! $ 1, 0% and j ! $0, 1% .
Unless otherwise noted, all content on this page is © Cengage Learning.
Copyright 2012 Cengage Learning. All Rights Reserved. May not be copied, scanned, or duplicated, in whole or in part. Due to electronic rights, some third party content may be suppressed from the eBook and/or eChapter(s).
Editorial review has deemed that any suppressed content does not materially affect the overall learning experience. Cengage Learning reserves the right to remove additional content at any time if subsequent rights restrictions require it.
582
CHAPTER 10
VECTORS AND THE GEOMETRY OF SPACE
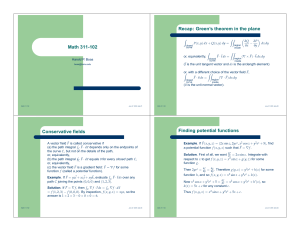
V EXAMPLE 4 Sketch the curve whose vector equation is
z
r!t" ! cos t i ! sin t j ! t k
SOLUTION The parametric equations for this curve are
x ! cos t
π
”0, 1, 2 ’
y
(1, 0, 0)
x
FIGURE 2
y ! sin t
z!t
Since x 2 ! y 2 ! cos 2t ! sin 2t ! 1, the curve must lie on the circular cylinder
x 2 ! y 2 ! 1. The point !x, y, z" lies directly above the point !x, y, 0", which moves
counterclockwise around the circle x 2 ! y 2 ! 1 in the xy-plane. (The projection of
the curve onto the xy-plane has vector equation r!t" ! $ cos t, sin t, 0%. See Example 2 in Section 9.1.) Since z ! t, the curve spirals upward around the cylinder as t
increases. The curve, shown in Figure 2, is called a helix.
■
The corkscrew shape of the helix in Example 4 is familiar from its occurrence in
coiled springs. It also occurs in the model of DNA (deoxyribonucleic acid, the genetic
material of living cells). In 1953 James Watson and Francis Crick showed that the
structure of the DNA molecule is that of two linked, parallel helixes that are intertwined as in Figure 3.
In Examples 3 and 4 we were given vector equations of curves and asked for a geometric description or sketch. In the next two examples we are given a geometric description of a curve and are asked to find parametric equations for the curve.
EXAMPLE 5 Find a vector equation and parametric equations for the line segment
that joins the point P!1, 3, "2" to the point Q!2, "1, 3".
FIGURE 3
SOLUTION In Section 10.5 we found a vector equation for the line segment that
joins the tip of the vector r 0 to the tip of the vector r1:
■ Figure 4 shows the line segment PQ
in Example 5.
r!t" ! !1 " t"r 0 ! t r1
0%t%1
z
(See Equation 10.5.4.) Here we take r 0 ! $1, 3, "2% and r1 ! $ 2, "1, 3% to obtain
a vector equation of the line segment from P to Q :
Q(2, _1, 3)
y
x
P(1, 3, _2)
FIGURE 4
or
r!t" ! !1 " t"$1, 3, "2% ! t$2, "1, 3 %
0%t%1
r!t" ! $1 ! t, 3 " 4t, "2 ! 5t%
0%t%1
The corresponding parametric equations are
x!1!t
y ! 3 " 4t
z ! "2 ! 5t
0%t%1
■
V EXAMPLE 6 Find a vector function that represents the curve of intersection of
the cylinder x 2 ! y 2 ! 1 and the plane y ! z ! 2.
SOLUTION Figure 5 shows how the plane and the cylinder intersect, and Figure 6
shows the curve of intersection C, which is an ellipse.
Unless otherwise noted, all content on this page is © Cengage Learning.
Copyright 2012 Cengage Learning. All Rights Reserved. May not be copied, scanned, or duplicated, in whole or in part. Due to electronic rights, some third party content may be suppressed from the eBook and/or eChapter(s).
Editorial review has deemed that any suppressed content does not materially affect the overall learning experience. Cengage Learning reserves the right to remove additional content at any time if subsequent rights restrictions require it.
SECTION 10.7
VECTOR FUNCTIONS AND SPACE CURVES
z
583
z
y+z=2
(0, _1, 3)
(_1, 0, 2)
C
(1, 0, 2)
(0, 1, 1)
≈+¥=1
0
y
x
y
x
FIGURE 5
FIGURE 6
The projection of C onto the xy-plane is the circle x 2 ! y 2 ! 1, z ! 0. So we
know from Example 2 in Section 9.1 that we can write
x ! cos t
y ! sin t
0 % t % 2)
From the equation of the plane, we have
z ! 2 " y ! 2 " sin t
So we can write parametric equations for C as
x ! cos t
y ! sin t
z ! 2 " sin t
0 % t % 2)
The corresponding vector equation is
z
r!t" ! cos t i ! sin t j ! !2 " sin t" k
0 % t % 2)
This equation is called a parametrization of the curve C. The arrows in Figure 6
indicate the direction in which C is traced as the parameter t increases.
y
■
USING COMPUTERS TO DRAW SPACE CURVES
Space curves are inherently more difficult to draw by hand than plane curves; for an
accurate representation we need to use technology. For instance, Figure 7 shows a
computer-generated graph of the curve with parametric equations
x
FIGURE 7 A toroidal spiral
z
x ! !4 ! sin 20t" cos t
y ! !4 ! sin 20t" sin t
z ! cos 20t
It’s called a toroidal spiral because it lies on a torus. Another interesting curve, the
trefoil knot, with equations
x ! !2 ! cos 1.5t" cos t
x
FIGURE 8 A trefoil knot
y
y ! !2 ! cos 1.5t" sin t
z ! sin 1.5t
is graphed in Figure 8. It wouldn’t be easy to plot either of these curves by hand.
Even when a computer is used to draw a space curve, optical illusions make it difficult to get a good impression of what the curve really looks like. (This is especially
true in Figure 8.) The next example shows how to cope with this problem.
Unless otherwise noted, all content on this page is © Cengage Learning.
Copyright 2012 Cengage Learning. All Rights Reserved. May not be copied, scanned, or duplicated, in whole or in part. Due to electronic rights, some third party content may be suppressed from the eBook and/or eChapter(s).
Editorial review has deemed that any suppressed content does not materially affect the overall learning experience. Cengage Learning reserves the right to remove additional content at any time if subsequent rights restrictions require it.