Chapter 2: Introduction to the
Stiffness (Displacement) Method
1
2. Introduction to the Stiffness
(Displacement) Method
Objectives:
1. To define the stiffness matrix.
2. To derive the stiffness matrix for a spring element.
3. To demonstrate how to assemble stiffness matrices into a global
stiffness matrix.
4. To illustrate the concept of direct stiffness method to obtain the
global stiffness matrix and solve a spring assemblage problem.
5. To describe and apply the different kinds of boundary conditions
relevant for spring assemblages.
6. To show how the potential energy approach can be used to both
derive the stiffness matrix for a spring and solve a spring assemblage
problem.
2
2.1 Definition of the Stiffness Matrix
• For an element, a stiffness matrix [k] is a matrix such that
{d} nodal displacements
{f} nodal forces of a single element
node
• For a structure comprising a series of elements, a stiffness matrix
[K] is a matrix such that
{d} global-coordinate NODAL displacements
{F} global forces of the whole structure
[K] stiffness matrix of the whole spring assemblage
(relates to global coordinate (x, y, z)
3
2.2 Derivation of the Stiffness Matrix
for a Spring Element
• Linear Spring:
• Spring Element:
Notice the directions
of the two forces.
u1, u2 = local nodal displacements
T = tension in spring
f1x, f2x = local nodal forces on x-axis
L = original length of spring
4
•
Select a displacement function
Most of the times, it is difficult to obtain a closed form or exact
solution, we assume a solution shape or distribution of displacement
within the element by using an appropriate mathematical function.
The most common functions used are polynomials.
Assume a linear displacement variation along x axis of the spring,
therefore:
or
Express u as a function of the nodal displacements u1 and u2 (not x1,
x2):
u is a function for the
entire element, not just for
the two nodes.
5
In matrix form:
or
Ni: called shape functions or interpolation functions.
Ni = 1
6
• Define the deformation relationships (in tension)
δ = u2 - u1 & T = kδ
T = k (u2 - u1)
• Force balance (Comparing the two figures):
In matrix form
7
• The stiffness matrix for a linear element is derived as
[k]: local stiffness matrix for the
element
1.
2.
3.
4.
Symmetric
Square
Singular
Positive semidefinite
• Force balance (Comparing the two figures):
In matrix form
8
2.3 Establishing the Global Stiffness Matrix for
a Spring Assemblage
• For two-spring assemblage:
•
•
Axial forces: applied at nodes 3 and 2.
x-axis: global axis of the assemblage.
• For element 1:
• For element 2:
• Continuity or compatibility requirement:
9
• FBD:
External forces must equal internal forces at each node.
• Nodal equations:
• Taking the form: {F} = [K]{d}:
10
2.4 Direct Stiffness Method
• Reliable method of directly assembling individual element
stiffness matrices to form the total structure stiffness matrix
and the total set of stiffness equations.
• Individual element stiffness matrices are superimposed
to obtain the global stiffness matrix.
• To superimpose the element matrices, they must be
expanded to the order (size) of the total structure
stiffness matrix.
11
• Revisit:
12
Example:
13
14
15
16
17
2.5 Boundary Conditions (BCs)
• Boundary (or support) conditions for structure models
must be specified or [K] will be singular.
• In general, the number of BCs necessary is equal to the
number of possible rigid body modes.
Boundary Conditions (BCs)
• Homogeneous BCs
• Most common type
• Occur at locations completely prevented from
moving
• Zero degrees of freedom
• Nonhomogeneous BCs
• Occur where finite nonzero values of
displacements are specified
• Nonzero degree of freedom
Homogenous BCs
• Homogenous BC is at the location which is fixed, (Node 1: u1
=0)
• The system relation can be written as:
• For all homogenous BCs, the row and columns
corresponding to the zero-displacement DOF can be deleted,
this makes solving for the unknown displacements possible.
20
Nonhomogeneous BCs
•
Consider: known displacement, δ, at Node 1
•
Let u1 = δ
•
By considering only the second and third force equations we can
arrive at the equation:
•
So for nonhomogeneous BCs we cannot initially delete row 1 and
column 1 like was done for homogenous BCs. We must transform
the terms associated with the known displacements to the right-side
force matrix before solving for the unknown nodal displacements.
21
Example:
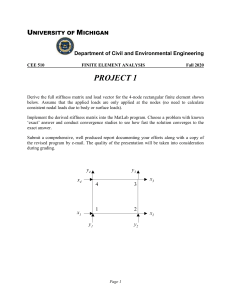
(a) Express the boundary conditions, the compatibility or
continuity condition, and the nodal equilibrium conditions.
Then formulate the global stiffness matrix and equations for
solution of the unknown global displacement and forces. The
spring constants for the elements are k1; k2, and k3; P is an
applied force at node 2.
(b) Using the direct stiffness method, formulate the same global
stiffness matrix and equation as in part (a).
22
23
Page 8
24
25
2.6 Minimum Potential Energy Approach
• Alternative method to derive the element equations and
stiffness matrix.
• More adaptable to the determination of element equations
for complicated elements such as:
•
•
•
•
Plane stress/strain element
Axisymmetric stress element
Plate bending element
3D solid stress element
• This principle is only applicable to elastic materials.
• Categorized as a “variational method” of FEM
• Use the potential energy approach to derive the spring
element equations as we did earlier with the direct method.
26
Principle of minimum potential energy
Statement:
Of all the displacements which satisfy the boundary
conditions of a structural system, those corresponding to
stable equilibrium configurations make the total potential
energy a relative minimum.
27
Three types of Equilibrium
Potential Energy
• Force always acts in the direction of decreasing potential energy.
• When potential energy is minimum, the body has stable equilibrium.
28
Spring with an external force
We do not employ force balance equation in the context of
the min PE principle, which has nothing to do with this eqn.
Two PEs:
1. Internal PE:
PE in spring (strain energy) U= ½ kx2
2. External PE:
PE of external force system Ω = - Fx
29
30
Potential Energy Approach to Derive
Spring Element Eqs.
• Consider the linear spring subject to nodal forces:
• The total potential energy is:
• To minimize the total potential energy the partial derivatives
of πp w.r.t each nodal displacement must be taken:
31
Potential Energy Approach to Derive
Spring Element Eqs.
• Simplify to:
• In matrix form:
• The results are identical to the direct method
32
Spring with two external forces
33
Conclusion
Using minimum potential energy principle, we can find out that
displacements at each DOF of a structure for which the system
attains stable equilibrium.
34
Example:
Use the principle of minimum potential energy to
solve the spring problem. That is, plot the total
potential energy for variations in the displacement
of the free end of the spring to determine the
minimum potential energy.
35
36