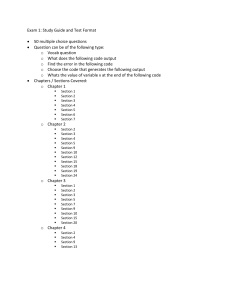
http://kitech.in/ Concepts of Contact Formulation Algorithm in CAE Contact Non-linearity-Class-Share KI TECHNOLOGIES, CONTACT NONLINEARITY MODELING SERIES. JOB oriented project based CAE Course, Basic to Advance Level +91 7692805413 | E: Info@kitech.in FEA tools offer several different formulations to enforce compatibility at a contact interface, a contact is enforced numerically based on three rules : No penetration between the bodies. A proper balance between the applied and the contact forces in case of a static problem. Conservation of momentum in case of dynamic problems such as impact. These are the most important requirements for any contact formulation to capture the interaction accurately. In general, there are two most popular formulations that meet these criteria. They are a Penalty formulation And a Lagrange formulation. Apart from these methods, Pure Penalty and Augmented Lagrange are penalty-based methods, and they are expected to produce small, non-zero penetration Penalty Formulation : Think in terms of springs Penalty formulation treats contact as a stiff spring that resists bodies from penetrating each other. This resistance is modeled in the form of contact stiffness which is derived as a function of several factors such as Material properties of both the bodies. The geometry of both surfaces. Kinematics of both the bodies. Contact stiffness is used in both the normal and tangential directions. Penalty formulation allows for a small amount of penetration, delta u, between the two bodies. Contact stiffness, K, is calculated, and restoring force, F, is calculated to prevent this penetration. JOB oriented project based CAE Course | Whats App : +91 7692805413 | E: Info@kitech.in This restoring force is nothing but the contact force. Contact stiffness should be large enough to provide restoring force enough to reduce the penetration to close to zero. Penalty formulation is used for calculating both contact pressure and also frictional stresses. If un is the contact gap, and Δu1 and Δu2 are the sliding distances in lateral directions, then the contact traction vector is defined by Some finite amount of penetration, D > 0, is required mathematically to maintain equilibrium. However, physically contacting bodies do not interpenetrate (D = 0). Tip: As long as the penetration does not lead to a change in the contact region, The penetration will not influence the contact pressure and Stress underneath the contact element. JOB oriented project based CAE Course | Whats App : +91 7692805413 | E: Info@kitech.in The normal Contact Stiffness knormal is the most important parameter affecting both accuracy and convergence behavior. A large value of stiffness gives better accuracy, but the problem may become more difficult to converge. If the contact stiffness is too large, the model may oscillate, with contacting surfaces bouncing off of each other. There is no additional DOF. There is no over constraining problem Iterative solvers are applicable – large models are doable! Tip: Always use Penalty if: Symmetric contact or self-contact is used. Multiple parts share the same contact zone 3D large model(> 300.000 DOFs), use PCG solver. JOB oriented project based CAE Course | Whats App : +91 7692805413 | E: Info@kitech.in Augmented Lagrange Like penalty with intelligence. Penetration will be a limited internal algorithm. Use this if penetration matters. For nonlinear solid body contact of faces, Pure Penalty or Augmented Lagrange formulations can be used: Both of these are penalty-based contact formulations Here, for a Fnormal, there is a stiffness knormal. The higher the contact stiffness, the lower the penetration x penetration, as shown in the figure below Ideally, for an infinite knormal, one would get zero penetration. This is not numerically possible with penalty-based methods, but as long as x penetration is small or negligible, the solution results will be accurate. JOB oriented project based CAE Course | Whats App : +91 7692805413 | E: Info@kitech.in The main difference between Pure Penalty and Augmented Lagrange methods is that the latter augments the contact force (pressure) calculations: Because of the extra term, the augmented Lagrange method is less sensitive to the magnitude of the contact stiffness knormal. Add an internally calculated term lamda. Lagrange Formulation Lagrange formulation treats contact as a constraint. Unlike penalty formulation, it does not require contact stiffness. Instead enforces contact penetration to be zero. This is the constraint that it uses in calculations The contact traction vector is included as part of the total reaction force vector. Contact gaps, and sliding distance are also solved as additional degrees of freedom. The equations of motion are then solved by imposing the constraint on contact gap, un and sliding distances Δu1 and Δu2 . JOB oriented project based CAE Course | Whats App : +91 7692805413 | E: Info@kitech.in Another available option is Lagrange multiplier Formulation: The Normal Lagrange Formulation adds an extra degree of freedom (contact pressure) to satisfy contact compatibility. Consequently, instead of resolving contact force as contact stiffness and penetration, contact force (contact pressure) is solved explicitly as an extra DOF. Fnormal = DOF Enforces nearly-penetration with pressure DOF zero/nearly zero Does not require a normal contact stiffness (zero elastic slip). Requires Direct Solver, which can be more computationally expensive. The contact formulations discussed in this lesson have both advantages and disadvantages compared to each other. JOB oriented project based CAE Course | Whats App : +91 7692805413 | E: Info@kitech.in MPC (Multi Point Constraints) Full bonded (linear – doesn’t separate) Rigid Beams instead of springs Handled well by the solver (better than CERIG) Can slightly stiffen surfaces For the specific case of “Bonded” and “No Separation” type of contact between two faces, a multi-point constraint (MPC) formulation is available. MPC internally adds constraint equations to “tie” the displacements between contacting surfaces. This approach is not penalty-based or Lagrange multiplier-based. It is a direct, efficient way of relating surfaces of contact regions that are bonded. Large-deformation effects also are supported with MPC-based bonded contact. JOB oriented project based CAE Course | Whats App : +91 7692805413 | E: Info@kitech.in Chattering is an issue that often occurs with the Normal Lagrange method If no penetration is allowed (left), then the contact status is either open or closed (a step function). This can sometimes make convergence more difficult because contact points may oscillate between open/closed status. This is called chattering If some slight penetration is allowed (right), it can make it easier to converge since contact is no longer a step change. The table below summarizes some pros (+) and cons (-) with different contact formulations: JOB oriented project based CAE Course | Whats App : +91 7692805413 | E: Info@kitech.in +91 7692805413 Info@kitech.in http://kitech.in/ JOB oriented project based CAE Course | Whats App : +91 7692805413 | E: Info@kitech.in