� vlcsnap-2020-06-15-14h40m46s325 - Windows Photo Viewer
File
""
Print ""
E-mail
Burn ""
Open ""
F
- -- .... '
F
---
�M
Mo
I
'
I
\
' .....
.... _____
.,
✓
I
I
o
I
''
.....;
\
' ....
I
I
I
..... ____ .,
-Fd
-Fd
X
6/15/202
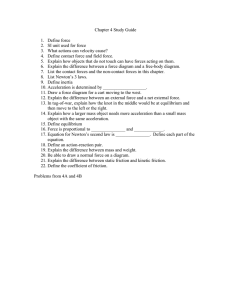
4.4 - Principle of Moments
Varignon's Theorem, the moment of a force about a point is equal to the
sum of the moments of the components of the force about the point.
~
Let's decompose Finto components
f', & f.;i.
•
:::::,,
----
::>-
r :--: F" + F~
1
D9
No Internet access
y
F
I
I
M 0 == r x F
I
I
I
I
I
I
M 0 = r x (F1 + F2 )
r
~--------~
0
X
)'
F
I
I
I
I
I
M 0 == r'xF
I
r'
- - -- - - - - - - - ~ X
0
y
F
I
I
I
I
M 0 = r'xF
I
I
I
F1 , _ __
- -- - - - - - - - ~ X
0
y
F2
F
I
I
•
M 0 == r'xF
I
I
I
•
I
I
I
I
I
F1
I
I
0
I
I
r1
I
I
I~
r?
-
•
I
I
M O == r 1 x F1 + r 2 x F2
\
-Mo,1 +M o.2
::...____ _ _ _ _ _ _ _------.::.
0
X
y
F
I
FY
-----
A (x, y)
r
- -- - - - - - - - - - - - - + X
0
y
F
'
''
/
''
/
''
/
/
," / F
2
r
- - -- - - - - - - - - - - + X
0
•
According to Varignon's Theorem,
Similarly for 2D problems,
"")
y
F,
>
r
y
0
,c..
f'7
0
••
f,<;
::,
p)i
<o
)
~
F
Mo ..,.
0
F
-•
~-;•~
/\
/
t:
F= = S K.N
. ,.,
7
/'1b = .
o.,..~\e.. ; ..,-fo
r->
r
=?
,
(a) °'
d
F
h -= CS L<.NJl ~ co5 \S
.
- ---.,.r
0
0
09
=:
\4.~ ~N·M ~
No/ntem1
..
"),
J -:: l~ <-; + i, j
~ :::- ~ ~ ~ --- ty J
So\f\ ~ -1-
<;ca \o-e~ re~v l~r"k
(3 Mo : n" -: :
- r J 1 - f°7 J
)L
::: -(Sco.5,4sei)(~s ;,,3o
0
)
-
>(
(Ss;("l4\·')(1c.o\Soj
a.
~o \v'> ) -
ve c-+-or
r
I
::,
Mo ---<
J
l(
~,
b
F ~ -F7
0
c\)(_
.,,.
09
Nolntemet
- - - - - - - - - - - - - - - - - - - - - - Ia
I
I
I
I
I
10
I
I
I
I
\
I
\
I \l a '
la
I
a
I
I
\
~ o
-r.
aa
0
\
I
\
I Ua '
la
•
I
I
M aa =U a ·M·o
ll ay
l/ 0 _
,,.l'
rz
~
F;·
-
Fz
0
I
I
I
I
I
I Ua
F
M aa =Mu
aa a
~
I
la
a
4.5 - Moment of a Force about a Specified Axis
Sometimes you want to find the moment produced by a
force about a Specified Axis.
Scalar
F
Moment about axis, y
Moment about any axis, a
X
)'
09
No Internet access
Moment Axis
d~, Moment arm - perpendicular distance
from the axis to the line of action of force
Magnitude
tAOI -.(..
lAo , -,
C-\
'("")(..
'(' '1
Yz
F )(.
F,
Fz
~
--
°'.1 '2
.•
-
u°" - Unit Direction vector al,o of axis a
r - Position vector from ANY point O to the ANY point on
the line of action of the force
Cartesian Moment Vector
r ," i ..\-k ....
i,~.._,,.+
O ... . A
+ 0. b.v-\- p:pe.
OA
(D
F = 3.00IV
D.'\'- + o .~~
J
---r -
(' r,..
Lols
®
C, \ ~ 4 e,. -;..\ \
-......>
.. ~ ..li"-"--
,r () l)
-- G· <':>~ .\ o. S k
I'
-:::.
'Fc1> = F ~ C C)
--:>
(\
_.>
D ~ () . S
'l'cu :::
f'
-l-6. L\ .J + o.~ \,(.
= 0. \
I';"' +- -C,
I'
C)
/\
J +o.s )(
ft> - V'c,.
--- - J
(!) 1\-{' -0.'t.'.J +-0.)~
Ucc;,
-
\I\;,
(). <\~ +o .l\~-1-0)~--
V'----
Vlt>A •
Mor,, = ~
:::
c- ~o}
~
,( OD
o. (.
C) .~
0. i;,.
0
C, '::,
~00
-}.oo
\oo
0
_ 0 , [ D ·\Oo- (>5 .-~o~- o .t. lo .c,, .\oo -o.':> •).o;:\ .; o
MoA. :: \c,o N · # '
IU .(.
4.6 - Moment of a Couple
A couple is defined as two parallel forces Lhat have the same Magnitude
and ~osite Directions, and are separated by a perpendicular distance, J
Scalar Formulation
+
F · Magnitude of one of the forces
G
J • perpendicular distance between
the forces
-,.
Vector Formulation
-'F.
~
r
0
_,.
• Position vector between the fore es
Thus,
T;_ ::- - F"'
Equivalent Coupl<.s
tf two couples produce a moment of the same magnitude
and direction in these two couples are equivalent
Resultant Couple Moment
A system of couple moments can be vector added to find the
resultant couple moment of the system
F
~Mo= F. d +F. d
2
2
~F-d
-F
y
X
F
I
I
I
d'
A
·-------------------I
I
I
d
•
0
I
I
I
I
I
I
•
;·
-F
X
~
MA = F . (d + d' )- F . d'
== F ·d
-F
I,.
MB: : : I\)(. V + r1 )(. -V
......
::::: (1\ - r1) )(. V
: : : (f · d)k
B
• The moment of a couple is a free vector
because it does not depend on the reference
point.
• The net external effect of a couple is that the
net force equals zero and the magnitude of
the net moment equals F·d.
Sea la r formulation
Vector formulation
F
-F
d
---------
-F
M == r xF
4.7 - Simplification of a Force and Couple System
Sometimes it is worthwhile to simplify a system of forces and coupled
moments into a equivalent system, consisting of a single Resultant
Force and Resultant Moment acting at a point.
Simply loaded beam - replace force at A with equivalent system at B
l=
., A
Add an equal and opposite force at B
Replace blue forces with
couple moment at B
System of Forces and Couple Moments
,
Cartesian Vector Form
Mechanical System
Chap 06
Any system that is designed to handle the effect of forces and/or manage energy.
Mechanical Engineering
Design/Size
Manage
Energy
Important parameters of a Mechanical System
Mass (inertia), Stiffness and Natural frequency (dynamics)
Structural Analysis
(Chapter 06)
• In mechanics structure is any thing that can sustain external loading or exert and alter forces.
• Structures are all around us. (try to identify) !!!
Structures
Trusses
Frames
Machines
Stationary/fixed
2-force members
Stationary/fixed
multi-force
members
Moving
multi-force
members
• In order to properly design or size structures we need to perform force analysis i.e. we need to
find the magnitude of forces they sustain.
• This chapter tells us how to perform force analysis of various structures.
• Force analysis also becomes important in dynamics (kinetics of motion)
Two Force Member
• All members (irrespective of their shape and size) when subjected to forces acting only at two
distinctive points of the member (usually the end or joining points) will be strictly two force
members.
Condition for Equilibrium of Two Force Members:
1. The resultant forces acting at the two points will be same in magnitude but opposite in
direction (to avoid translations)
2. The two resultant forces must be colinear to each other (to avoid rotation/moments)
3. The colinear line of action of the force will be a straight line joining the two points where all
the forces were initially acting.
• All members that are pin connected at
both their ends ar essentially two force
members.
Trusses
• Trusses are structures that are used to support external loads.
• Every member of a truss is a stationary member and is assumed to be a two force member.
• Trusses are extensively used in construction of roofs, bridges, communication and transmission
towers.
• Also known as simplified frames.
Zero-Force Member
• Member of a truss structure which has no force or load in it. In other words it does not
support any part of the external loading.
• Its purpose is to provide additional stability during the construction phase of the truss
structure.
• It may start to support load if the applied loading is altered or changes in future.
• Identification: If only two members form a truss joint provided that no external load or
support reaction acts at that joint than both the members will be zero-force members.
(a)
FBD of Joint A
Frames
• Frames are stationary structures that are composed of multi force members (more than two
forces )
• Frames are used to support external loads only.
Examples:
Load bearing Frame
Chair
Bicycle Frame
Lifting Frame of a crane
Catapult Frame
Over head
Crane Frame
Machine tool Frame
Machines
• Machines are structures that are composed of moving interconnected multi force members.
• Machines can transmit or alter forces from one point to another point for the purpose of
reducing human effort.
Examples:
Gear Train
Can Crusher Machine
Construction m/c
Pulley
System
IC Engine
Oil Pumping
Machine
Steering Mechanism
Internal
Expanding Brake
Mechanism
Methods for Analyzing Truss Structure
• There are actually two methods for analyzing truss structures.
1. Method of Joints = useful when force in all members of the truss is required.
2. Method of Sections = useful when force in only few members of the truss is required.
Method of Sections
• This method is based on the fact that if a truss structure is in equilibrium than any portion of
the truss is also in equilibrium.
• In this method an imaginary section is passed from those members only in which the forces
are required.
• In general the section must not pass from more than three members with unknown forces.
• The section must divide the entire truss structure in two separate portions.
• Eqs of equilibrium can than be used for any of the two portions to find the values of the
unknown forces.
• Sometimes more than one section is
required for the complete solution !!
FBD of Joint H:
Eqs of Equb:
We have 6 unknowns & for entire frame we
have 3 equilibrium eqs !!! (disconnect
members and analyze separately)
900 N.m
Entire FBD:
Finally for Mc
Finally,
Mechanical advantage = M.A = output/input = 285.68/40 = 7.142 !!
Force of clamp
on blk is equal
& opposite !!
Friction
(Chap # 08)
Friction is a reaction force that resist impending motion between two contacting surfaces due to
roughness, inter-surface adhesion, surface contaminations and possibly surface deformations.
Friction force always acts tangent or parallel to the contacting surfaces in a direction opposite
to that of the intended motion.
Advantages of Friction:
High friction is desirable in machine elements like clutches, brakes, clamps (vice), belt drives,
screws and wedges. Also friction allows us to walk and helps maintain the equilibrium.
Friction is also important in manufacturing processes like friction welding, friction saw blade
for metal cutting and rolling processes
Triboelectric generators (a device to generate electricity when friction exist b/w two dissimilar
materials)
Disadvantages of Friction:
Friction can be unwanted e.g. in machining processes such as lath turning, thermodynamic
machines, anti friction bearings and sliding surfaces.
Another unwanted effect of friction is wear of the material.
Generation of heat.
Cause of Dry Friction
In reality no surface is smooth and contains many micro irregularities (roughness features).
The micro irregularities can cause interlocking between the contacting surfaces which results in
frictional resistance.
The tangential or parallel reaction force of friction mechanistically models the effect of these
micro irregularities during the equilibrium analysis of contacting bodies.
Smooth contacting surface
N
Infinite micro irregularities
at the contact surface
In order to balance the “tipping” effect caused by the force P the resultant normal force
(N) acts at a distance x from the line of action of W such that.
Note: Tipping motion also means that force of friction between the contacting surfaces
is high such that slipping is prevented. When tipping motion is about to take place N
acts at a/2 (i.e. contact being made at single point only)
Regimes of Motion during Dry Friction
There can be three regimes:
1) No motion (static equilibrium)
2) Impending motion
3) Motion
Referring to Fig . 1 the force of friction (F) will increase as the applied force (P) increases and
F reaches its maximum value after which the body will start to slip.
F = μs N
Fig. 1
Impending motion
F < μs N
F = μk N
The drop in the curve is due to the fact that
it is relatively easy to keep the body in
motion once it has started to move.
φs = Angle of static friction
µs is the coefficient of static friction
(a measure of degree of roughness b/w the
mating surfaces). It can be only experimentally
measured
φk = Angle of kinetic friction
µk is the coefficient of kinetic friction.
Type 1: (no impending motion)
• These are essentially equilibrium problems. (body remains in static equilibrium)
• F = µs N can not be applied at any point of contact.
• The frictional force must be calculated through equilibrium equations only and than compared
with the maximum value of the frictional force i.e. F = µs N to justify the equilibrium state.
• In these problems usually the applied force is given and the task is to determine whether the
applied force can cause impending motion /slipping of the body at the point of contacts or not.
No. of unknowns = No. of equilibrium equations only.
l
L
Step 01
Equilibrium will only be maintained if:
Step 02
(must apply this check)
Calculate the friction forces using
equilibrium equations only:
𝐹𝑥 = 0
𝐹𝑦 = 0
𝑀=0
Type 2: (impending motion at all points)
• These problems can be identified by the fact that impending motion /slipping of the body at all
point of contacts can take place at the same time.
• Use F = µs N at all points of contacts.
No. of unknowns = No. of equilibrium equations + frictional equations.
Impending
motion point
?
Available Equations:
Equilibrium + Friction
𝐹𝑥 = 0
𝐹𝑦 = 0
𝑀=0
Type 3: (impending motion at some points only)
• These problems can be identified by the fact that impending motion /slipping of the body is
allowed only at some point of contacts.
• F = µs N can only be applied where impending motion/slipping is taking place.
• Usually in these problems the external applied load is to be determined by assuming
impending motion at one point of contact and equilibrium at all other contacts thereby
calculating the value of P and satisfying the condition of equilibrium at all other points.
• If the condition of equilibrium at other points are not satisfied than we must solve the problem
again by changing our assumption.
No. of unknowns less than ˂ No. of equilibrium + frictional equation.
Either:
Or:
𝐹𝑥 = 0
𝐹𝑦 = 0
𝑀=0
Example 8-1
→ + 𝐹𝑥 = 0
80cos(30)-F = 0 → 𝐹 = 69.28 𝑁
↑ + 𝐹𝑦 = 0
-80sin(30)+NC -196.2 = 0 → 𝑁𝑐 = 236.2 𝑁
FBD
Check for Tipping:
x < 0.4 m tipping will
not take place
Check for Slipping:
Fmax = µNc = 0.3× 236.2 = 70.86 𝑁
Since F < Fmax slipping will not take place.
Observations:
1.
2.
3.
4.
5.
No clear indication of impending motion is specified in the problem statement.
External load is given.
Dimensions are given therefore must check for tipping.
3 unknowns = 3 equilibrium equations.
Therefore it can be finally concluded that
It is type 1 problem (cannot use F=µN during solution)
the crate will remain in equilibrium. ANS
Find the value of ϴ for which member AB slips at both the ends. The weight of the
member is 100 N.
FBD:
Equations of Equilibrium:
Observations:
=5 (3 equb + 2 fric)
F = µN can be used in the solution
Friction Eqs
(FB = µBNB)
(FA = µANA)
(FA = NB)
F8–3. Determine the maximum force P that can be applied without causing the two 50-kg crates to
move. The coefficient of static friction between each crate and the ground is µs = 0.25.
Entire FBD:
Observations:
• Indication of impending motion is given.
• No size given so tipping & moment
equations can not be used.
• Unknowns = 06
• Equilibrium eqs = 04
• Friction eqs = 02
• Unknowns = Equb eqs +Friction eqs
• Type 2 problem
• F= µN can be used during the solution.
Equilibrium of crate A:
Equilibrium of crate B:
(1)
(2)
122.5 = 0
8–47. Block C has a mass of 50 kg and is confined between two walls by smooth rollers. If the
block rests on top of the 40-kg spool, determine the minimum cable force P needed to move the
spool. The cable is wrapped around the spool’s inner core. The coefficients of static friction at A
and B are µA = 0.3 & µB = 0.6.
Equilibrium of Blk C:
Observations:
• Size is given eq of moment can be used.
• External load P is unknown.
• Total unknowns = 05
• Equb eqs = 3+2 = 05 (3 for spool & 2 for blk C)
• Friction eqs = 02 (one for A & one for B)
• Unknowns < Equb eqs + Fric eqs.
• Type 3 problem
• Cannot use F = µN at all points simultaneously.
Equilibrium of Spool:
(a) Assuming B will slip first:
Check:
FA, max = µANA = 0.3×490 = 147 N
Since FA > FA, max our assumption is wrong and
point A is actually slipping.
Therefore we need to repeat our calculations
by changing our assumption.
(b) Assuming A will slip first:
F9–1. Determine the centroid (x, y) of the shaded area.
9-26 Locate the centroid of the area.
𝑥1 = 𝑦 2
1
𝑥2 = 𝑦 2
𝑥ҧ = 0.45 𝑚
Ans
•9–73. Locate the center of mass of the assembly. The hemisphere and the cone are made from
materials having densities of 8 Mg/m3 and 4 Mg/m3 respectively.
❖ Note that the given 3D object (volume) is symmetric about the z-axis i.e.
z-axis is the axis of symmetry for this object. (means centroid, C.M & C.G
all three will lie on z-axis only.
1
Table:
(For Center of Mass)
S no.
m = ρV (kg)
𝒛 (mm)
𝒛 m (kg-mm)
1
4×10-6 ×3141592.654
100+75
= 175
2199.114
2
8×10-6 ×2094395.102 100-37.5
= 62.5
1047.197
2 o
Σ
29.321
3246.311
𝑧𝑚
ҧ = 110.72 mm
Because gravity (g) is uniform
Table: (For Centroid)
S. no
𝒛 (mm)
V (mm3)
𝒛 V (mm4)
1
175
3141592.654
549778714.5
2
62.5
2094395.102
130899693.9
𝑧𝑐ҧ = 130 mm
Note that centroid will not coincide with the C.M
because the material is not homogeneous (density is
not constant)
9–59. Locate the centroid (x, y) of the composite area.
❖ Given area is not symmetrical so its centroid will not lie on x or y axes.
in2
in3
3
2
o
4
4
1
Table: (For 𝑥ҧ of the Centroid)
in2
in3
3
2
4
1
o
Table: (For 𝑦ത of the Centroid)
4
Second Moment of Area & Moment of Inertia
(Chapter 10)
Formulations:
In subjects like fluid mechanics, machine design and solid mechanics an integral of the form shown below is often required to be
calculated.
❖ Note that:
𝐼𝑥 = 𝑦 2 𝑑𝐴 & 𝐼𝑦 = 𝑥 2 𝑑𝐴
Ix is the second moment of area of cross section about the x-axis and Iy is the second
moment of the area of cross section about the y-axis. Integration with strip method will be
used as we did in chapter 09. Also for composite shapes integration sign can be converted
to summation sign as we did in chapter 09.
Physical Concept:
Second moment of area of cross section is the ability of a cross section to resist bending or
wrapping of the cross sectional area about a particular axis when acted upon by an external
loading. This quantity is essentially calculated when designing structural members like
beams, shafts and columns in order to predict their strength and deflections. It is purely a
geometric property.
න 𝑦𝑑𝐴 & න 𝑥𝑑𝐴
Already have been evaluated in chapter 9
within formulas related to centroid of areas.
These were the first moment of areas of
cross section.
Note that the degree of the
bending of the beam can be
altered if the dimensions of
the cross sectional area are
altered. In other words if the
second moment of area of the
beam cross section can be
increased its bending can be
decreased.
The Parallel Axis Theorem
It is clear that second moment of area is always calculated about a certain axis. This axis can be the centroidal axis of the cross
sectional area (i.e. set o f axes that passes from the centroid of the cross sectional area) and on the other hand this axis can be any
other axis as well. The parallel axis theorem as the name suggest can be utilized in calculating the second moment of area of a
cross section about any axis that is parallel to the centroidal axis of the cross sectional area.
𝐼𝑥 = second moment of cross
sectional area about the x-axis.
𝐼𝑥ҧ ′ = second moment of cross
sectional area about the
centroidal axis 𝑥 ′ . (formulas
available for simple shapes)
A = cross sectional area.
dy = perpendicular distance
between the two axes.
Since 𝑥 ′ & 𝑦 ′ are the centroidal axes and their origin is placed at the centroid C of
the area therefore, the coordinates of the centroid are (0, 0). Hence second integral
in the above equation vanishes and we can finally integrate and write:
&
The above equations are known as the parallel axis theorem.
Moment of Inertia
It is the ability of a body to resist angular acceleration and deceleration when the body is in rotational motion about an axis. It
depends on the distribution of mass within the body and its geometry. It is most often used in studying the rotational dynamics
and vibration of machine elements and/or mechanical structures.
𝐼𝑚 = 𝑟 2 dm = 𝑟 2 𝜌𝑑𝑉
Im is the moment of inertia of the body and r is the perpendicular distance of the mass from the axis of rotation. Its value will
be different about different axis of rotation. Formulas are available for simple shaped bodies like thin rod, circular disk &
plates etc. Also for composite bodies integration can be converted to summation sign.
❖ Flywheels due to their high moment of inertia are used in power generating machines to keep the
output power uniform.
❖ Hollow shafts can transmit more power compared to solid shafts due to higher moment of inertia.
❖ Ship’s moment of inertia is made higher about the pitching axis to encounter large waves.
❖ Higher moment of inertia is required to make mechanical structures more robust against vibrations.
❖ Knowledge of moment of inertia is required to study problems in vibration engineering.
Parallel Axis Theorem
A similar expression for parallel axis theorem also exist for moment of inertia.
IG = moment of inertia of the body about the axis
passing through its center of mass. (formulas are
available for simple shaped bodies)
m = mass of the body.
d = perpendicular distance between the axes.
Why Moment of Inertia (MOI) is r2m ?
• Assume a single particle of mass m rotating about the z-axis at a distance r from the axis.
• Angular velocity of the particle will be ω rad/s.
• Tangential velocity of the particle will be v = rω.
1
Linear K.E = 2 𝑚𝑣 2
(Note: m represents the inertia in linear dynamics)
1
Rotational K.E = 2 𝑚𝑟 2 𝜔2
• It means that in rotational dynamics the analogue of inertia is not just represented by m
but is given by mr2.
• The term mr2 appears so frequently in rotational dynamics that it is given a symbol Im
or J which is known as the moment of inertia (MOI).
• It should be noted that Im = r2m is only valid for a single particle located at a distance
of r from the axis of rotation.
• Since a rigid body is composed of infinite number of such particles which are also
located at different positions measured from the axis of rotation therefore for rigid
bodies we use integration.
Hence we write:
𝐼𝑚 = න 𝑟 2 𝑑𝑚
m
F10–4. Determine the second moment of area about the y axis.
ANS
Let us solve problem F10-4 using a horizontal strip !!!
Note: The moment arms measured from the
y-axis changes as we move along the length of
the strip. Therefore, now Iy cannot be directly
calculated using the formula 𝐼𝑦 = 𝑥 2 dA.
When this situation occurs we need to use the
parallel axis theorem.
Parallel axis theorem on differential basis:
𝑥2 = 𝑦3
From the given function
&
3
𝑥 = 𝑦 ൗ2
Using integration both sides:
16
16
3
16
9
= 𝑦𝐼𝑑 48 𝑥 3 𝑑𝑦 = 48 𝑦 3 𝑦 Τ2 𝑑𝑦 = 48 𝑦 Τ2 𝑑𝑦
Integrating between the limits 0 to 1 m on y-axis we get:
16 2
11
𝐼𝑦 =
×
(1) ൗ2
48 11
Iy = 0.061 m4
ANS (same result)
10-36/37. Find the centroid yഥ for the composite area shown and calculate the second moment of area Ix´ and Iy.
❖ The given composite area is completely
symmetric about the y-axis but it is not
symmetric about the x´ axis.
❖ Remember
when
a
composite
area/volume is not symmetric about a
given axis it’s second moment of area
about that axix is always calculated
using the parallel axis theorem.
❖ The second moment of area about the
symmetric axis can be calculated using
the Boolean algebra of simple shapes if
and only if the centroid of all simple
shapes lies on that axis.
Second moment of area Ix´
Finally for the entire area Ix´:
Second moment of area Iy
Finally for the entire area Iy:
CONCLUSION:
The given cross section has higher second
moment of area about the y-axis. It means that it
is more difficult to bend the given cross sectional
area about the y-axis
10–120. The pendulum consists of the slender rod OA, which has a mass per unit length of 3kg/m . The thin disk has a mass per
unit area of 12 k/m2 . Determine the distance 𝑦ത to the center of mass G of the pendulum; then calculate the moment of inertia of
the pendulum about an axis perpendicular to the page and passing through G.
❖ Note that moment of inertia
MOI is always calculated for
a volume and therefore, the
given figure represents a
composite volume.
❖ Note that the center of mass of the individual
volumes is off set from the axis that is passing
from point G. This means that in order to
calculate the MOI for this composite volume we
need to use the parallel axis theorem.
❖ The concept of Boolean algebra in case of MOI
can only be used if the center of mass of
individual volumes coincides with the center of
mass of the composite volume.
Finally
ANS
10–97. Determine the mass moment of inertia of the solid formed by revolving the shaded area around the axis. The density of
the material is ρ = 7.85 Mg/m3
(1)
❖ Again note that the given figure
represents a volume.
❖ The volume is symmetric abt the z-axis.
❖ We need to consider a differential disk
element in order to find the MOI for the
given solid volume.
❖ However first the MOI for the disk
element must be estimated relative to
the z-axis as disk itself is a finite body
not a particle.
(differential area of
the ring element)
Finally eq (2) can be used to estimate the moment of
inertia of the given solid abt the z-axis.
Method of Virtual Work
(Chap 11)
• Method of virtual work is an alternative (additional) method of analyzing rigid bodies in equilibrium.
• As the name suggests it is based on the concept of “work or energy”. (energy methods are also useful concepts in mechanics)
• Since bodies in equilibrium generally remains at rest hence the work done in this method remains hypothetical or just virtual
i.e. it does not really exist. However, quantities calculated like forces, angles and moments will be real.
• This method is best suited for system of connected rigid bodies like frames and machines.
• Unlike equilibrium method (chap 05), the solution is obtained without calculating the support reactions. (obvious advantage)
Virtual Work of a Force
Virtual Work of a Couple Moment
Positive work = when direction of F and dr is same otherwise
Positive work = when sense of M and ϴ is same otherwise
negative.
negative.
❖ Note here δr and δϴ are first order differential quantities (very small quantities) that are only virtual (does not exist in
reality) and are established by considering the geometry of the problem and the space variables (i.e. x, y coordinates for 2D
problems).
Principal of Virtual Work
If a rigid body is in equilibrium than the algebraic sum of virtual work of all the active forces and couple moments acting on
the body is zero.
Note: only active forces will be able to do work.
11–5. Determine the force developed in the spring required to keep the 10 lb uniform rod AB in equilibrium when ϴ = 35°.
Fs
W = 10 lb
G
δyG
yG
Ax
δϴ
δxB
xB
Ay
From Geometry:
xB = 6cosϴ & yG = 3sinϴ
Applying Principle of Virtual Work:
δU = 0
M δϴ + W δyG −Fs δxB = 0
(1)
Virtual Displacements:
By differentiating wrt ϴ both sides of eq (1)
δxB = -6sinϴδϴ & δyG = 3cosϴδϴ
M δϴ + 3Wcosϴδϴ − Fs(-6sinϴδϴ) = 0
Fs = (−M −3Wcosϴ)/6sinϴ = (−10−30cos(35))/6sin(35)
Work done by Active Loads:
δUM = M δϴ, δUW = W δyG & δUFs = −Fs δxB
Note Ax & Ay are non-active forces as pt A does not move at all.
Fs = −10.046 lb
ANS
11–9. If a force P = 100 N is applied to the lever arm of the toggle press, determine the clamping force developed in the block
when ϴ = 45°. Neglect the weight of the block.
FD
δyD
yD
δyA
δϴ
δϴ
Bx
δϴ
From Geometry:
yD = 2(0.2cosϴ) & δyA = 0.5δϴ
Virtual Displacements:
By differentiating wrt ϴ both sides of yD = 2(0.2cosϴ)
δyD = -0.4sinϴδϴ
Work done by Active Loads:
δUP = P δyA , δUFD = FD δyD
Note Bx & By are non-active forces as pt B does not move & CD is
a two-force member.
By
Applying Principle of Virtual Work:
δU = 0
δUP + δUFD = 0
P δyA + FD δyD = 0
0.5Pδϴ + FD (-0.4sinϴδϴ) = 0
FD = 0.5P/0.4sinϴ = 0.5×100/0.4sin(45)
FD = 176.77 ≈ 177 N
ANS