Weight Operated Material Handling Device Project Declaration
advertisement

DECLARATION
We hereby declare that the project entitled “FABRICATION OF WEIGHT OPERATED MATERIAL
HANDLING DEVICE”, is an authentic work carried out under the supervision of Mr. Yogendra Singh
Rajpoot, Assistant Professor, Department of Mechanical Engineering, Rajkiya Engineering College, Mainpuri
in partial fulfilment for the award of the degree Bachelor of Technology. This is also declared that this
dissertation has not been submitted to any other Institute/University for the award of any degree or diploma.
REC Mainpuri
DATE: 05/06/2024
Amit Kumar Yadav (2008400400006)
Anish Chand Yadav (2008400400008)
Nitin Narayan (2008400400038)
Nitish Kumar (2008400400039)
I
CERTIFICATE
This is to certify that the dissertation entitled “FABRICATION OF WEIGHT OPERATED
MATERIAL HANDLING DEVICE”, submitted by Anish Chand Yadav (2008400400008) in partial
fulfilment for the award of the Degree of Bachelor of Technology in Mechanical Engineering of Rajkiya
Engineering College Mainpuri, is an authentic record of student’s own work carried out by them under
my guidance and supervision. The content of this report in full or in parts has not been submitted to any
other Institute/University for the award of any degree or diploma.
Mr. YOGENDRA SINGH RAJPOOT
(Assistant Professor)
(Department Of Mechanical Engineering)
(Rajkiya Engineering College Mainpuri)
Dr. A.K SHARMA
(Head Department of Mechanical Engineering)
(Rajkiya Engineering College Mainpuri)
II
ACKNOWLEDGEMENT
It is said that gratitude is a virtue. This part is dedicated to special thanks that we would like to deliver to
the people who helped us in making the fulfilment of this project possible.
First and foremost, we offer our sincere gratitude to our mentor Mr. Yogendra Singh Rajpoot, Assistant
Professor, Department of Mechanical Engineering who has given us a chance to work under profound
guidance and have supported throughout our project with his patience and knowledge. We attribute the
level of our bachelor’s degree to his encouragement and effort without whom, this project would not have
been possible.
We express our deepest gratitude to Dr. Avadesh K. Sharma, Head of Mechanical Engineering
Department. He always encouraged us and advised us to keep in constant touch with our mentors. He is a
source of great knowledge and he is always working hard to do the best for his students.
We are also grateful to project coordinator Mr. Kushal Saxena for his kind support. Also, we are thankful
to our departmental faculties Mr. Vikrant Mishra & Mr. Desh Deepak for their generous support.
Last but definitely not the least, we would like to thank all the staff of mechanical department for their
continuous help throughout the project.
III
ABSTRACT
Material handling is one of the most used operations in industry. Material handling
involves transfer of jobs from one machine station to another, also used in storage and
packaging. This Weight operated material handling device has load carrying capacity of
maximum 55kg, with less or no maintenance. This project is basically fabrication of weight
operated material handling device. This device has more reliability, it does not require
external power i.e., electrical, it totally operate and depends on weight of material or job.
Industrial material handling device are operating on electrical power but this device does
not require electricity, it is operating on weight of job. This project solves the problem of
different types of material handling related work in a typical material handling system in a
small-scale industry. Spring operated material handling device has large load carrying
capacity, easy to maintenance and high reliability of operation. Material handling
equipment is the mode to transport material from one point to another in a commercial
point or space.
IV
TABLE OF CONTENTS
DECLARATION ..............................................................................................................................I
CERTIFICATE ............................................................................................................................... II
ACKNOWLEDGEMENT ............................................................................................................. III
ABSTRACT .................................................................................................................................. IV
LIST OF TABLES ....................................................................................................................... VII
LIST OF FIGURES .................................................................................................................... VIII
LIST OF SYMBOLS ..................................................................................................................... IX
CHAPTER 1: INTRODUCTION .................................................................................................... 1
1.1 Existing technology ...................................................................................................................... 1
1.2 Weight operated material handling device.................................................................................... 3
CHAPTER 2: LITERATURE REVIEW ......................................................................................... 4
2.1 Objectives of present work ........................................................................................................... 6
CHAPTER 3: SYSTEM DESIGN ................................................................................................... 7
3.1. Frame ........................................................................................................................................... 7
3.1.1
Selection of square tube size ........................................................................................... 8
3.1.2
CAD of frame.................................................................................................................. 9
3.1.3
Fabrication .................................................................................................................... 10
3.2. Extension spring......................................................................................................................... 11
3.2.1 CAD of spring ...................................................................................................................... 11
3.3. Rack and pinion ......................................................................................................................... 12
3.4 Chain and sprocket ...................................................................................................................... 13
3.5 Shaft ............................................................................................................................................ 14
3.6 Pedestal bearing (P204) .............................................................................................................. 15
3.7 PPCP Wheel ................................................................................................................................ 16
CHAPTER 4: EXPERIMENTAL PROCEDURE ......................................................................... 18
4.1 Welding ....................................................................................................................................... 18
4.1.1. Shielded Metal Arc Welding (SMAW): ............................................................................. 18
4.1.2. Gas Metal Arc Welding (GMAW): .................................................................................... 18
4.1.3. Gas Tungsten Arc Welding (GTAW): ................................................................................ 18
4.2 Drilling ........................................................................................................................................ 18
4.3 Machining ................................................................................................................................... 19
4.4 Cutting ........................................................................................................................................ 19
4.5 For machining ............................................................................................................................. 21
4.6 For cutting ................................................................................................................................... 21
CHAPTER 5: CALCULATIONS ................................................................................................. 22
5.1 Calculations for spring ................................................................................................................ 22
5.2 Calculations for rack and pinion ................................................................................................. 22
5.3 Calculations for chain drive ........................................................................................................ 23
V
5.4 Calculations of shaft ................................................................................................................... 24
5.5 Formulas used for theoretical distance covered .......................................................................... 26
CHAPTER 6: RESULT AND CONCLUSION ............................................................................. 27
6.1 Comparison between theoretical and practical values ................................................................ 27
6.2 Conclusion .................................................................................................................................. 28
REFERENCE ................................................................................................................................ 29
APPENDIX.................................................................................................................................... 30
VI
LIST OF TABLES
Table 1.Components material and count. ............................................................................ 7
Table 2.Material properties of frame. .................................................................................. 8
Table 3.Material specifications of spring .......................................................................... 11
Table 4.Observation table.................................................................................................. 27
VII
LIST OF FIGURES
Figure 1.Conveyor belt .................................................................................................................... 1
Figure 2.Forklift truck...................................................................................................................... 1
Figure 3.Industrial crane .................................................................................................................. 1
Figure 4.Material handling robot ..................................................................................................... 2
Figure 5:Leonardo da Vinci’s spring-operated cart. ........................................................................ 4
Figure 6.Stress analysis of frame ..................................................................................................... 8
Figure 7. CAD of frame in SolidWorks ........................................................................................... 9
Figure 8. Isometric section views of frame...................................................................................... 9
Figure 9.Cutting of square tubes on chop saw ............................................................................... 10
Figure 10.Base frame and vertical tube welding on base frame. ................................................... 10
Figure 11.CAD of spring on SolidWorks. ..................................................................................... 11
Figure 12.Rack and pinion ............................................................................................................. 12
Figure 13.Rear sprocket ................................................................................................................. 13
Figure 14.Chain and sprocket ........................................................................................................ 13
Figure 15.Shaft .............................................................................................................................. 14
Figure 16.P204 Pedestal bearing. .................................................................................................. 16
Figure 17.Polypropylene copolymer (PPCP) wheel. ..................................................................... 16
Figure 18.Welding equipment ....................................................................................................... 18
Figure 19.Drilling machine ............................................................................................................ 19
Figure 20.Chop saw ....................................................................................................................... 19
Figure 21.Lathe machine ............................................................................................................... 20
Figure 22.Grinding machine .......................................................................................................... 21
Figure 23.BMD for vertical plane.................................................................................................. 24
Figure 24.BMD for horizontal plane. ............................................................................................ 24
Figure 25.BMD for vertical plane.................................................................................................. 25
Figure 26.BMD for horizontal plane. ............................................................................................ 25
Figure 27. Graph plot between distance, time and load. ................................................................ 27
Figure 28. Graph plot between theoretical and practical distance covered. .................................. 28
VIII
LIST OF SYMBOLS
•
FOS (factor of safety)
•
Shear stress (𝜏)
•
Spring index(C)
•
Modulus of rigidity(G)
•
Module(m)
•
Stiffness of spring(K)
•
Lewis form factor(Y)
•
Number of teeth(z)
•
Chain tension(P)
•
Pressure angle (𝜙)
•
Ultimate tensile strength (𝑠𝑢𝑡 )
•
Radial force on gear (𝐹𝑅 )
•
Tangential force on gear (𝐹𝑡 )
•
Number of active coils in spring(N)
•
Velocity factor (𝐶𝑣 )
•
Service factor (𝐶𝑠 )
•
PPCP (polypropylene copolymer)
IX
CHAPTER 1: INTRODUCTION
Material handling is an essential aspect of various industries, requiring efficient and reliable
solutions for transporting heavy loads. Traditional material handling devices often involve
manual effort or external power sources, which can be time-consuming and labor-intensive.
The self-weight operated material handling device offers a unique solution by utilizing the
weight of the load itself to drive the cart. This innovative approach aims to streamline the
material handling process and reduce the physical strain on workers.
1.1 Existing technology
1.1.1 Conveyors: Conveyors are used for moving material between two fixed workstations,
either continuously or intermittently. They are mainly used for continuous and mass production
operations; they are suitable for most
operations where the flow is more or less
steady. Conveyors are of various types, with
rollers, wheels or belts to help. To move the
material along conveyors may be power-driven
or may roll freely. The decision to provide
Figure 1.conveyor belt
conveyors must be taken with care, as they are
expensive to install moreover, they are not much flexible and, where two or more converge, it
is necessary to adjust the speeds at which the two conveyors move.
1.1.2 Industrial trucks: Industrial trucks are more
adaptable than conveyors since they can move between
various points and are not permanently fixed in one place.
They are therefore more suitable for intermittent
production and for handling various sizes and shapes of
material. There are many types of truck petrol-driven,
electric, hand powered, and so on. Their greatest advantage
lies in the wide range of attachments available these
increase the truck’s ability to operate various types and
shapes of material.
Figure 2.Forklift truck
1.1.3 Cranes and hoists: The major advantage of cranes
and hoists are that they can move heavy materials through
overhead space. However, they can usually serve only for a
limited area. Here again, there are several types of cranes
and hoist, and within each type there are various loading
capacities. Cranes and hoists can be used both for
intermittent and for continuous production.
Figure 3.Industrial crane
1
1.1.4 Robots: Many types of robots exist. They vary in shape, size, and in function and
maneuverability. While many robots are used for handling and
transporting material from one place to another, others are used to
perform operations such as welding or spray painting. The choice of
material-handling equipment among the various possibilities that
exist is not an easy task. In several cases the same material may be
handled by various types of equipment, and the great diversity of
equipment and attachments are available which does not make the
problem any easier. In some cases, the nature of the material to be
handled narrows the choice.
Figure 4.Material
handling robot
Table 1. Above summarizes the different technology used for material handling process
Technology
Pros
Cons
CONVEYORS Faster Speeds, Ergonomic Working, Very limited features, Belt
Fewer Mistakes & Accidents, Utilize can be difficult to clean
Shopfloor Space Effectively.
INDUSTRIAL Lift Heavy Weights, Maneuverability,
Highly Customizable.
TRUCKS
CRANES
AND HOISTS Higher Overall Capacity, Longer Life
Expectancy, Designed Specifically for
the Application.
ROBOTS
Shorter Lead Times,
High Upfront Cost,
Maintenance Required,
Training required
Large and Semi-Permanent,
Height of Storage Racking
should be less than crane.
High initial investment,
scarcity of expertise of
workers.
2
1.2 Weight operated material handling device
A weight-operated material handling device is an innovative tool designed to facilitate the
efficient and safe movement of materials within various industrial settings. Utilizing the
principles of gravity and mechanical leverage, this device is engineered to automatically
respond to the weight of the load it handles. The primary advantage of such a system lies in its
ability to adjust to different load weights without the need for manual recalibration or
adjustment, thereby increasing operational efficiency and reducing the potential for human
error.
This device is particularly beneficial in environments where materials of varying weights need
to be transported frequently, such as warehouses, manufacturing plants, and distribution
centers. By integrating weight-sensitive mechanisms, this device ensure that each load is
handled with optimal force and precision, minimizing the risk of damage to both the materials
and the device itself. Moreover, the automation of the weight adjustment process contributes
to a safer work environment, as it reduces the need for manual lifting and the associated risks
of musculoskeletal injuries among workers.
In summary, a weight-operated material handling device represents a significant advancement
in industrial logistics, offering a blend of efficiency, adaptability, and safety that meets the
demands of modern material handling tasks.
3
CHAPTER 2: LITERATURE REVIEW
The idea of making a spring-operated cart can be traced back to centuries ago, it was first told
by Leonardo da Vinci, he sketched out his plans for this vehicle around the year 1478. Although
it remained on paper during his lifetime, it has since captured the imagination of historians and
engineers alike. Here are the key details about Leonardo’s innovative creation:
1. Concept and Purpose:
o Leonardo’s car wasn’t designed for mass-production or practical transportation.
o It lacked a seat and wasn’t meant for passengers.
o Instead, it served as a special attraction for Renaissance festivals, aiming to
instill wonder and awe in attendees.
2. Design Features:
o The car was powered by two
symmetric springs hidden within
cylindrical drum-like casings.
o The machine’s power source was not
the commonly believed leaf springs
(used in automotive suspensions) but
rather coiled springs located inside
the frame.
3. Working Mechanism:
o Rotating the wheels in the opposite
direction wound up the internal Figure 5:Leonardo da Vinci’s springoperated cart.
springs.
o Once released, the car could travel
approximately 130 feet (40 meters).
o Think of it as a mechanical wind-up toy or a precursor to modern robots.
4. Building a Working Model:
o In 2004, Paolo Galluzzi, finally build a functional model based on Leonardo’s
sketches.
o Previous attempts during the 20th century had failed due to unclear instructions.
o The team meticulously designed a digital model to ensure its feasibility.
o The full-scale car matched Leonardo’s original dimensions: 5 feet 6 inches long
(1.68 meters) and 4 feet 11 inches wide (1.49 meters).
o However, due to safety concerns, they also created a smaller one-third scale
model for testing and demonstrations.
Balpreet Singh et al. [1] In this paper a weight operated material handling device (WOMHD)
is designed and fabricated. A mathematical relation is also derived between various variables.
This helps us to understand the variation of different variables on the performance of WOMHD.
Experiments are performed on the machine and a graph is plotted between theoretical and
practical values after getting the data from the experiment.
Mahesh Kadam et al. [2] In this research paper only one compression spring has been used to
design the weight operated material handling cart, to further decrease the cost of the project,
4
this decreases the weight carrying capacity but as a whole the cost of the project gets decreased
and it becomes more feasible.
Design proposed is not practically feasible as in this design platform is mounted on a single
road. When loaded may tilt producing unbalance forces and uneven or no motion. No
mathematical relation between variables has been given.
Fanisam M.BN. et al. [3] This paper gives idea about weight operated material handling
device. They have used four compression springs for this purpose, this paper discusses the
problem of different types of material handling equipment in a typical material handling
system. Spring operated material handling equipment has large load carrying capacity, which
is easy to maintenance and high reliability of operation.
S. Kamble et al. [4] In this research paper in order to propelled dead weight type automatic
guided vehicle, they have treated rack pinion mechanism to conventional AGV in order to
acquires self-propelled motion to material handling conventional AGV by utilizing rack and
pinion motion transfer in this type of mechanism they have using rack and pinion type gear
rack and pinion type gear are connected to platform, four springs are connected each corner of
the platform so it will be acts power saving units. When dead weight is kept in the platform,
platform moves downward direction so there exist gear train, it is subjected to lower portion
(front or rear axle of the vehicle). When gravitational force is applied on the platform and then
platform is moving downward direction. When weight is removed from the platform, vehicle
move backward direction without application of external forces.
MD. Muztahid Hasan et al. [5] In this work, a spring operated SWMH system is developed
and this system does not need external energy or manpower to operate which reduce the
material handling cost as well as production cost. At first design of various mechanical parts,
a details drawing is done using SOLIDWORKS software. All the designed elements are
fabricated and assembled for final SWMH system. After constructed the system, a performance
test is performed in for loading condition. The performance test results show that the maximum
75.5 kg of weight covered is about 4 m distance. The calculated and experimental results show
the 1.92% error due to ignore the frictional loses during calculation.
5
2.1 Objectives of present work
To fabricate a weight operated material handling device using extension springs, the objective
of the present work in material handling devices is to enhance efficiency, safety, and
adaptability in the movement, storage, control, and protection of materials throughout
manufacturing, distribution, consumption, and disposal processes. This involves leveraging
advanced technologies and innovative design principles to optimize operations, reduce costs,
and minimize downtime. Key goals include:
1. Automation and Robotics Integration: Implementing automated systems and robotics to
streamline material handling processes, reduce human error, and increase throughput. This
includes using Automated Guided Vehicles (AGVs).
2. Ergonomics and Safety Enhancements: Designing equipment that minimizes physical strain
and injury risks to operators, incorporating features such as ergonomic controls, improved load
handling mechanisms, and real-time safety monitoring systems.
3. Energy Efficiency and Sustainability: Developing devices that consume less energy and
utilize sustainable materials. This includes energy-efficient motors, regenerative braking
systems, and the adoption of eco-friendly materials and manufacturing processes.
5. Flexibility and Scalability: Creating modular and adaptable systems that can easily adjust to
varying loads, different types of materials, and changing operational needs. This involves
designing equipment with interchangeable parts and scalable features to accommodate future
growth and technological advancements.
6. Cost Reduction and Productivity Improvement: Aiming to lower the total cost of ownership
through improved design and maintenance practices while boosting productivity by reducing
cycle times, increasing handling speeds, and enhancing the overall efficiency of material flow.
By focusing on these objectives, the present work in material handling devices seeks to create
solutions that not only meet the current demands of industries but also anticipate future
challenges and opportunities, ensuring sustainable and efficient operations in the long term.
6
CHAPTER 3: SYSTEM DESIGN
Table 1.Components material and count.
Sr.
No.
1.
Object
Material
Material Properties
Quantity
Rack & Pinion
High corrosion
resistance
1
2.
Spring
High Strength &
Elasticity
2
3.
Pedestal
Bearing
Ductility, weldability
6
4.
Square tube
18/8 Stainless
Steel
18% Chromium
8% Nikel
High carbon Steel
(0.5-1) % carbon
+other alloy
Mg\Si\Mn
Mild Steel
(0.2-0.05) %
carbon
Mild Steel
(0.2-0.05) %
carbon
42ft
5.
Chain
Alloy Seel
Mo, Mn, Ni, Cr
6.
Wheel
7.
Sprocket
PPCP
(Polypropylene
Copolymer)
Cast iron
Ductility, Weldability,
Impact Strength
resistance, tensile
strength
Corrosion, wear and
tear resistance and
hardness
High strength,
durability, and
chemical resistance.
Hard, Brittle, good in
compression
1
4
2
3.1. Frame
An assembly of rigid members (of which one is multi force member) intended to be a stationary
structure for supporting a load. The structure of frame of a machine tool is an essential
functional component inside the machining system. Important tasks of machine structures are
the assurance of the geometric configuration of the machine elements even under the static,
dynamic and thermal loads, as well as the absorption and guiding of forces and torques. There
are two basic types of frames for machines: machine frames and support frames. The strength
of the machine frame and support frame is a function of both the weight of the supported
machinery and the frame's material of construction.
7
3.1.1 Selection of square tube size
As the cart was to be made for loads around 50kg to 55kg, various frames designs were made
and were tested on SolidWorks under the given load, stress analysis was done to see whether
the frame is feasible for the load or not. After performing the test following specification of
the square tube were found suitable for the given load.
Figure 6.Stress analysis of frame
•
Specification of square tube as per the analysis:
1. Material-AISI 1020
2. Dimension-25mm*25mm*2mm
Table 2.Material properties of frame.
Property
Elastic Modulus
Poisson’s Ratio
Shear Modulus
Mass Density
Tensile Strength
Compressive Strength
Yield Strength
Thermal Expansion Coefficient
Thermal Conductivity
Specific Heat
Material Damping Ratio
Value
200000
0.29
77000
7900
420.507
351.571
1.5e-050
47
420
-
Units
N/mm^2
N/A
N/mm^2
Kg/m^3
N/mm^2
N/mm^2
N/mm^2
/K
W/(m-k)
J/ (kg. k)
N/A
8
3.1.2 CAD of frame
Figure 7. CAD of frame in SolidWorks
Figure 8. Isometric section views of frame
9
3.1.3 Fabrication
After the selection of suitable specification of square tube through analysis of CAD,
procurement of material has been done and following methodology was followed:
1.Cutting of square tubes
• 10*75cm
• 7*60cm
• 2*18cm
• 2*24cm
• 2*13cm
• 1*4cm
Figure 9.Cutting of
square tubes on chop
saw
2.Welding of the cut square tubes
• 2*60cm tubes and 2*75cm tubes are welded to make lower and
upper frame as shown in figure.
• 4*75 tubes are welded vertically to join upper and lower frame.
• 1*60cm tube is welded 30cm from one end on lower frame as a base to the middle
vertical frame.
• 2*60cm tubes are welded on upper frame at 30cm and 43cm from one end to hang the
springs on them.
• Remaining tubes are welded in middle to house the pedestal bearings, and to restrict
the motion of rack in only vertical direction.
Figure 10.Base frame and vertical tube welding on base frame.
3.Total weight of frame
• Weight = 0.375 kg/ft
• Total length of square tubes used=42.12ft.
• Total weight of frame = 15.8kg
10
3.2. Extension spring
A spring is an elastic object that stores the mechanical energy and releases it when an opposing
force is removed. If you need to apply force to create movement or hold something in a place
without the use of engines or other powered means, springs could be the solution. Extension
springs also called helical wound springs that are so closely coiled together to create initial
tension in the coils. This initial tension creates resistance against the force applied to its ends
for extension. The initial tension helps to determine how closely and tightly the coils are
attached. Extension springs absorb and stores energy as well as it creates a resistance to a
pulling force. These springs are normally attached at both ends with other components and
when these components move apart, the spring tries to bring them back together again.
3.2.1 CAD of spring
Figure 11.CAD of spring on SolidWorks.
Table 3.Material specifications of spring
Property
Elastic Modulus
Poisson's Ratio
Tensile Strength
Yield Strength
Tangent Modulus
Thermal Expansion
coefficient
Mass Density
Hardening Factor
Value
204999.9984
0.29
425.0000032
282.685049
1.2e-05
Units
N/mm^2
N/A
N/mm^2
N/mm^2
N/mm^2
/k
7858.000032
0.85
Kg/m^3
N/A
11
3.3. Rack and pinion
Rack and pinion is a type of linear actuator that has a circular gear (the pinion) engaging a
linear gear (the rack). Together, they convert rotational motion into linear motion. The rack
and pinion system is a fundamental mechanical design used widely across various industries.
Its ability to convert rotational motion to linear motion efficiently makes it invaluable in
applications ranging from vehicle steering to industrial machinery. Its design and functionality
are straightforward yet highly effective, balancing simplicity, precision, and reliability.
Components
1. Rack: This is a flat, toothed part that
looks like a straight gear.
2. Pinion: This is a small, circular gear
that meshes with the teeth of the rack.
How It Works
- Rotational to Linear Motion: When
the pinion rotates, its teeth engage with
the teeth on the rack, causing the rack to
move in a straight line. Conversely,
linear motion of the rack causes the
pinion to rotate.
- Gear Ratio: The gear ratio between the
rack and pinion determines the distance
the rack moves for each rotation of the
pinion.
Figure 12.Rack and pinion
Applications
1. Steering Systems in Automobiles: Rack and pinion steering is common in cars. When the
driver turns the steering wheel, the pinion rotates, moving the rack side to side and thus turning
the vehicle's wheels.
2. Railway Systems: In some mountain railways, a rack and pinion system help trains climb
steep grades.
3. Industrial Machinery: Used in various machines for precise linear movements, like CNC
machines.
Advantages
- Simplicity and Efficiency: The system is mechanically simple and efficient at converting
motion.
- Precision: Provides accurate and controlled linear motion, essential for applications like
vehicle steering.
- Compact Design: Suitable for applications with limited space.
12
Disadvantages
- Wear and Tear: The constant meshing of gears can lead to wear, requiring maintenance.
- Backlash: Slight play or slack in the system can occur, affecting precision.
Variants
1. Variable Ratio Rack and Pinion: Provides a variable steering ratio, improving vehicle
handling at different speeds.
2. Power Rack and Pinion: Includes hydraulic or electric assistance to reduce the effort required
to turn the steering wheel.
3.4 Chain and sprocket
A chain and sprocket mechanism is a simple and effective method used to transfer rotary
motion and torque between two shafts, commonly employed in bicycles, motorcycles,
industrial machinery, and conveyor systems. The mechanism consists of two primary
components: the chain and the sprockets.
Components
1. Sprockets:
- Driving Sprocket: Attached to the power source (e.g., engine,
pedals). It initiates the motion.
- Driven Sprocket: Connected to the output (e.g., wheels,
machinery). It receives the motion.
- Sprockets are toothed wheels that engage the links of the chain,
ensuring efficient transmission of power. The size of the sprocket
and the number of teeth determine the gear ratio and influence the
speed and torque transmitted.
2. Chain:
- A flexible, looped component that wraps around the sprockets.
It is composed of a series of interconnected links with pins
and rollers, allowing for smooth engagement with the
sprocket teeth.
- Chains are designed to handle high tension and
transmit power over long distances without significant
stretching or breaking.
Figure 13.Rear
sprocket
Operation
Figure 14.Chain and sprocket
The driving sprocket rotates, pulling the chain along its
teeth. This motion causes the chain to engage the teeth of
the driven sprocket, which in turn rotates. The continuous movement of the chain allows for
the transfer of power from the driving sprocket to the driven sprocket, facilitating motion in
the desired direction.
13
Advantages
1. Efficiency: Chain and sprocket mechanisms are highly efficient in transferring power with
minimal energy loss.
2. Durability: Chains are robust and can withstand significant wear and tear, making them
suitable for heavy-duty applications.
3. Simplicity: The design and operation of chain and sprocket systems are straightforward,
allowing for easy maintenance and repair.
Applications
- Bicycles: The most familiar use, where pedaling turns the driving sprocket, moving the chain
and rotating the rear wheel.
- Motorcycles: Similar to bicycles but designed to handle higher speeds and power.
- Conveyor Systems: Chains and sprockets are used to move materials along a production line.
3.5 Shaft
A shaft is a rotating machine element, typically cylindrical, that is used to transmit power from
one part of a machine to another. The primary function of a shaft is to transmit torque and
rotation. They are commonly found in engines, gearboxes, turbines, and various machinery.
Shafts can vary in size, material, and design based on their application.
Types of Shafts
1. Transmission Shaft: Used to transmit power
between the source and the machine, like in
automobiles where it connects the engine to the
wheels.
2. Machine Shaft: Integral parts of machines
themselves, such as the crankshaft in an engine.
3. Axle Shaft: These are stationary shafts that
support rotating elements like wheels or gears.
4. Flexible Shaft: Used where the transmission of
power needs to be done over a path that cannot be
straight, they can bend around corners.
Figure 15.Shaft
Materials
Shafts are made from a variety of materials depending on the required strength, durability, and
flexibility. Common materials include:
- Carbon Steel: Offers high strength and durability, making it ideal for heavy-duty applications.
- Alloy Steel: Provides enhanced mechanical properties and corrosion resistance.
- Stainless Steel: Used in applications requiring corrosion resistance, such as marine
environments.
Design Considerations
When designing a shaft, engineers consider several factors to ensure its efficiency and
longevity:
14
- Load: Shafts must be designed to handle the mechanical load they will transmit, which
includes both the torque and bending moments.
- Stress Concentration: Sharp changes in geometry can create stress concentrations, leading to
potential failure points. Smooth transitions and fillets can mitigate this.
- Deflection: Excessive deflection can lead to misalignment and vibrations. Therefore, the shaft
must be designed to minimize deflection.
- Torsional Rigidity: The shaft should be torsionaly rigid to avoid excessive twisting under
load.
Manufacturing Processes
Shafts can be manufactured using various processes such as:
- Machining: Turning, milling, and grinding processes shape the shaft to the desired
dimensions.
- Forging: Enhances the mechanical properties by aligning the grain structure.
- Casting: Used for complex shapes but may require additional machining for precision.
Applications
Shafts are ubiquitous in mechanical systems. In automotive engines, the crankshaft converts
reciprocating motion into rotational motion to drive the vehicle. In industrial machinery, shafts
are used in conveyor systems, turbines, and pumps to transmit power and motion.
3.6 Pedestal bearing (P204)
The P204 pedestal bearing, part of the P200 series, is a widely used component in mechanical
engineering and machinery applications. It is designed to provide support and facilitate the
rotation of shafts in various types of equipment. Here are the key features and specifications of
the P204 pedestal bearing:
1. Housing: The housing of the P204 bearing is typically made from cast iron or pressed steel.
Cast iron provides strength and durability, making it suitable for heavy-duty applications, while
pressed steel offers a lighter and more cost-effective option.
2. Bearing Insert: The insert is usually a UC204 bearing, which is a spherical, self-aligning
insert that allows for minor misalignments of the shaft. This feature is crucial in applications
where perfect alignment is challenging to achieve.
3. Dimensions:
- Bore Diameter: 20 mm
- Base to Center Height: 30.2 mm
- Total Length: 127 mm
- Width of Base: 38.1 mm
- Bolt Hole Diameter: 10 mm
4.Sealing: P204 bearings often come with seals or shields to protect against contamination from
dust, dirt, and moisture. This extends the bearing's lifespan and reduces maintenance needs.
15
5. Lubrication: The bearing typically has a provision for re-lubrication, usually through a grease
fitting, allowing for regular maintenance and ensuring smooth operation over time.
6. Applications: P204 pedestal bearings are versatile and used in a wide range of applications,
including agricultural machinery, conveyor systems, fans, HVAC equipment, and other
industrial machines. Their design supports moderate radial loads and light axial loads, making
them suitable for various operating conditions.
7. Installation: The P204 bearing unit is easy to install, with mounting bolts securing it to the
supporting structure. The set screws on the inner ring ensure a firm attachment to the shaft.
Overall, the P204 pedestal bearing is valued for its reliability, ease of installation, and ability
to handle misalignment, making it an essential component in many mechanical systems.
Figure 16.P204 Pedestal bearing.
3.7 PPCP Wheel
Polypropylene Copolymer (PPCP) wheels are widely used
in various industrial and commercial applications due to
their excellent balance of mechanical properties and costeffectiveness. PPCP, a type of thermoplastic polymer, is
made by polymerizing propylene with small amounts of
other monomers, which enhances its impact resistance and
flexibility compared to homopolymer polypropylene.
Key Features and Specifications of PPCP Wheels:
1. Material Properties:
Figure 17.Polypropylene
- Impact Resistance: PPCP offers superior impact
copolymer (PPCP) wheel.
resistance, making it suitable for applications involving
rough surfaces or heavy loads.
- Chemical Resistance: It is resistant to a wide range of chemicals, including acids, alkalis,
and organic solvents, ensuring durability in harsh environments.
- Moisture Resistance: PPCP is hydrophobic, providing excellent performance in wet or
humid conditions without degrading.
16
2. Design and Construction:
- Weight: PPCP wheels are lightweight, reducing the overall weight of the machinery or
equipment they are used in, which can improve energy efficiency.
- Temperature Tolerance: They typically operate effectively within a temperature range of 20°C to +80°C, making them suitable for both cold and moderately hot environments.
- Non-Marking: These wheels are non-marking, which means they do not leave stains or
marks on floors, making them ideal for indoor applications where floor appearance is
important.
3. Applications:
- Material Handling: Commonly used in trolleys, carts, and pallet jacks in warehouses and
distribution centers due to their durability and ease of movement.
- Medical and Food Industry: Their chemical resistance and non-marking properties make
them suitable for hospital and food service equipment.
- Automotive and Aerospace: Used in various support and transportation equipment due to
their lightweight nature and high load-bearing capacity.
4. Advantages:
- Cost-Effective: PPCP wheels are generally more affordable compared to wheels made from
other materials like metal or rubber, offering a cost-efficient solution without compromising
on performance.
- Maintenance: They require minimal maintenance and are easy to clean, which enhances
their appeal in hygiene-sensitive environments.
Installation and Maintenance:
- Ease of Installation: PPCP wheels are straightforward to install, typically using standard axle
fittings or bearings.
- Longevity: With proper maintenance, such as regular cleaning and ensuring they are used
within their operational limits, PPCP wheels can have a long service life.
17
CHAPTER 4: EXPERIMENTAL PROCEDURE
4.1 Welding
Welding is a fabrication process that involves joining two or more pieces of metal or
thermoplastic materials together by applying heat, pressure, or a combination of both. The
materials being joined are melted, and upon cooling, they form a strong bond, resulting in a
continuous and permanent joint. Welding is widely used in various industries for the
construction, repair, and manufacturing of structures, machinery, and components. Arc
Welding: Arc welding utilizes an electric arc to generate the heat required to melt the work
pieces and create the weld joint. The most common types of arc welding include:
4.1.1. Shielded Metal Arc Welding (SMAW):
Also known as "stick welding," SMAW uses a coated electrode that melts during the welding
process, forming the weld pool and creating a protective shield of slag.
4.1.2. Gas Metal Arc Welding (GMAW):
Also referred to as "MIG welding," GMAW uses a continuous wire electrode and a shielding
gas to protect the weld pool from atmospheric contamination.
4.1.3. Gas Tungsten Arc Welding (GTAW):
Also known as "TIG welding," GTAW uses a non-consumable tungsten electrode and an inert
gas shield to produce high-quality welds with precise control.
Figure 18.Welding equipment
4.2 Drilling
Drilling is a machining process that involves creating holes in a solid material using a rotating
cutting tool called a drill bit. The drill bit is pressed against the work piece, and as it rotates, it
applies axial force and rotational motion to remove material and form a hole. Drilling is a
fundamental process used in various industries for creating holes of different sizes and depths
in a wide range of materials.
18
Figure 19.Drilling machine
4.3 Machining
Machining refers to the process of shaping or altering a work piece using various cutting tools
and machinery. It involves the removal of material from the work piece to achieve the desired
shape, size, and surface finish. Machining operations can be performed on a wide range of
materials, including metals, plastics, composites, and wood.
Advantages of machining include:
Wide Range of Operations: Machining encompasses a variety of operations, such as turning, milling,
drilling, grinding, and threading. This allows for the creation of different features, shapes, and surface
finishes to meet specific requirements.
Material Removal: Machining allows for efficient and controlled removal of material, enabling
the creation of desired shapes and sizes. It is particularly useful when working with hard
materials or when intricate details are required.
Surface Finish: Machining processes can provide excellent surface finishes, ensuring smooth
and precise surfaces that meet desired aesthetic and functional requirements.
Repairability: Machining allows for the repair and reconditioning of components, extending
their lifespan and reducing the need for complete replacements. This can result in cost savings
and reduced waste.
4.4 Cutting
In mechanical engineering, cutting refers to the process
of separating or dividing a material into smaller pieces or
altering its shape by removing excess material. Cutting
operations are commonly performed using various
cutting tools, such as saws, drills, milling cutters, turning
tools, and grinding wheels. These tools are designed to
penetrate, shear, or abrade the material, resulting in the
removal of chips and the creation of the desired shape or
size.
Figure 20.Chop saw
19
Cutting operations in mechanical engineering can be classified into different categories:
1. Turning: Turning involves rotating the work piece while a cutting tool removes
material to create cylindrical shapes. This operation is commonly used for creating
shafts, cylindrical features, and symmetrical components.
Figure 21.Lathe machine
2. Milling: Milling uses a rotating cutting tool with multiple cutting edges to remove
material from the work piece. It can produce various shapes, including flat surfaces,
contours, slots, and complex three-dimensional forms.
3. Drilling: Drilling involves creating holes in the work piece using a rotating drill bit.
The drill bit penetrates the material, creating a cylindrical hole with a specific
diameter.
4. Sawing: Sawing is the process of using a reciprocating or rotating blade to cut through
a material, typically in a linear motion. It is commonly used for cutting bars, pipes,
and other stock materials to desired lengths.
5. Grinding: Grinding uses an abrasive wheel to remove material and achieve precise
surface finishes. It is often employed for creating smooth surfaces, sharpening cutting
tools, and removing burrs.
Following tools were used for the various operations in the fabrication of the prototype:
20
4.5 For machining
4.5.1 Grinding Machine:
Grinding machines use abrasive wheels or belts to remove
material and achieve precise surface finishes. They are used
for grinding, honing, and polishing operations to create
smooth and accurate surfaces.
Figure 22.Grinding machine
4.5.2 Filing:
In the context of machining and metalworking, refers to a manual material removal process
that involves the use of a file. A file is a hand tool with a handle and a hardened steel or
diamond-coated surface containing multiple parallel ridges called teeth. Filing is performed by
applying the file to the surface of a work piece, using a back-and-forth motion, to remove
material and shape or smooth the surface.
4.6 For cutting
4.6.1 Cutting Wheels:
Cutting wheels, also known as abrasive discs or cutting discs, are abrasive tools that consist of
a thin, circular disc with abrasive particles embedded in it. They are used with power tools,
such as angle grinders or rotary tools, to cut through metal, stone, concrete, or other hard
materials.
4.6.2 Hacksaw:
A hacksaw is a cutting tool commonly used in metalworking and woodworking to cut through
various materials, particularly metals. It consists of a C-shaped frame with a handle at one end
and a removable blade stretched across the open end of the frame.
21
CHAPTER 5: CALCULATIONS
5.1 Calculations for spring
The spring has to be designed for the given known parameters:
• P=540N, x=20cm(fixed)
• The constant ‘A’ and ‘m’ are 1855 and 0.187(from the design data book)
• Modulus of rigidity = 81370N/mm^2
• Spring index C = 6
Step 1. Permissible shear stress
𝑆𝑢𝑡 =A/d^m = 1857/d^0.187
𝜏 = 0.5𝑠𝑢𝑡 = 927.5/d^0.187
Step 2. Spring wire diameter
4𝑐−1
0.615
K = 4𝑐−4 + 𝑐 = 1.2525
8𝑃𝐶
𝜏 = K (𝜋𝑑2 ) = 927.5/d^0.187
927.5/d^0.187 = [1.2525(8) (270) (6)]/𝜋𝑑 2
d = 2.57~3mm
Step 3. Check for design
From design data book the ultimate tensile strength for SW grade and 3mm diameter=
1520N/mm^2
𝜏 = 0.5𝑆𝑢𝑡 = 0.5*1520= 760N/mm^2
8𝑃𝐶
1.2525(8∗270∗6)
Also 𝜏 = K (𝜋𝑑2 ) =
= 574.1037N/mm^2
π∗9
760𝑁
Therefore 𝜏 < 𝑚𝑚2
The design is satisfactory for the wire diameter of 3 mm.
Step 4. Mean coil diameter
D = C*d = 18mm
Step 5. No of active coils
𝛿=
8𝑃𝐷 3 𝑁
𝐺𝑑4
= 104.6 ~ 105
Step 6. Stiffness of spring
𝐺 𝑑4
k= 8𝐷3𝑁 = 277.68N/m
5.2 Calculations for rack and pinion
•
•
•
•
Length of rack = length of spring + distance of pinion shaft from upper frame +needed
expansion of spring = 30cm + 40cm + 20cm.
Pressure angle, 𝜙 = 200
Maximum weight to be applied on rack, F = 55*9.8=539.55N
Value of Lewis form factor, Y for 200 full depth involute system = 0.484(from design
22
data book) [6]
Step 1.
Radial force,𝐹𝑅 = Fsin𝜙 = 184.53N
Tangential force, 𝐹𝑇 = Fcos𝜙 = 507.01N
Lewis beam strength
𝑠𝑏 = mb𝜎Y = 2.75*1.65*260*0.484 = 570N
⇒ 𝒔𝒃 > 𝑭𝑻 therefore, design is safe.
Step 2.
Estimation of module based on beam strength [7]
60∗10^6(𝑘𝑤)(𝐶𝑠 )(𝐹𝑠 )
m= [
𝑠
𝑏
𝑚
𝜋𝑧𝑛( 𝑢𝑡 )𝐶𝑣( )𝑌
3
]^1/3
=2.537~2.75mm
Step 3.
Million number of teeth to avoid interference
2𝐴
T≥ 𝑠𝑖𝑛2𝑅𝜙
T≥ 17
5.3 Calculations for chain drive
•
•
•
•
•
•
•
•
•
Number of teeth on rear sprocket 𝑧2 = 44
Number of teeth on smaller sprocket, 𝑧1 = 18
Approximate Centre distance, a = 78.5
Chain pitch, p = 12.70mm (from design data book) [6]
𝑝
Pitch circle diameter, D =
180 = 17.8cm
𝑠𝑖𝑛(
•
•
)
KW rating of chain at 124 rpm = 0.65(from design data book) [6]
Roller diameter,𝑑1 = 7.95mm (from design data book) [6]
Transverse pitch, 𝑝𝑡 = 14.3mm (from design data book) [6]
Number of chain links
𝑎
•
𝑧2
𝑧 +𝑧
𝑧 −𝑧
2
𝑝
𝐿𝑛 = 2 (𝑝)+( 1 2 2) + ( 22𝜋 1) × (𝑎) = 155 links
Correct center distance
2
𝑧 +𝑧
𝑧 +𝑧
𝑧 −𝑧 2
𝑝
a = ⁄4 {[𝐿𝑛 − ( 1 2 2 )] + √[𝐿𝑛 − ( 1 2 2 )] − 8 ( 22𝜋 1) } = 64.5cm
Chain tension
𝑧1 𝑝𝑛1
V = 60∗10
3 = 0.47244 m/s
P = 1000*(KW/V) = 1375.836N
Factor of safety
𝐹𝑠 = 13800/1375.836= 10.03(13800=breaking load taken from design data book)
23
Specification of sprockets
•
•
•
•
•
•
Diameter of rear sprocket = 17.4cm
Diameter of smaller sprocket = 7.8 cm
Number of teeth on rear sprocket 𝑧2 = 44
Number of teeth on smaller sprocket, 𝑧1 = 18
Pitch of rear sprocket = 1.24cm
Pitch of smaller sprocket = 1.36cm
5.4 Calculations of shaft
Shaft 1
• Tangential force, 𝐹𝑇 = 497.8N
• Radial force 𝐹𝑅 =181.18
• FOS = 3
• Chain tension, p = 1375.84N
• Vertical component of chain tension= Psin 𝜃= 1224.12N
Horizontal component of chain tension = P cos 𝜃 = 637.5
On applying equilibrium equation
• ∑𝐹𝑦 = 0
𝑇1 +𝑇2 = 1721.4N
• Bending moment about point D = 0
𝐹𝑇 *16+p*4 = 𝑇1 *27.5
𝑇1 = 467.38N
𝑇2 = 1254.01N
In vertical plane
Bending moment at B
=𝑇1 *11.5 = 5374.87Ncm
Bending moment at C
=𝑇1 *23.5-𝐹𝑇 *12 = 5016.07Ncm
(𝜃=62.34)
Figure 23.BMD for vertical plane.
In horizontal plane
𝑇3 +𝑇4 =818.94N
Bending moment about D is 0
𝑇3 *27.5=181.18*16+637.75*4
𝑇3 = 198.177N
𝑇4 = 621.76N
Bending moment at B = 2279.03Ncm
Bending moment at C = 2478.84Ncm
Bending moment is maximum at point B
2 + 2279.832 = 5838.084 Ncm
̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅
𝑀𝑏 = √5374.87
𝑀𝑡 = 8.7*637.75 = 5548.42 Ncm
𝜏 = 0.5𝑆𝑢𝑡 /FOS = 66.67MPa
16
𝜏𝑚𝑎𝑥 = 𝜋𝑑3 √𝑚𝑏2 + 𝑚𝑡2 = 66.67MPa
𝑑= 1.832 ~ 2cm
24
Figure 24.BMD for horizontal plane.
Shaft 2
• Chain tension, p = 1375.84N
• FOS = 1.5
On applying equilibrium equation
•
•
•
For vertical plane
∑𝐹𝑦 = 0
𝑇1 +𝑇2 = 1224.12 N
Bending moment about point C = 0
𝑇1 *60 – 1224.12*22.5 = 0
𝑇1 = 459.04 N
𝑇2 = 761.075 N
Figure 25.BMD for vertical plane.
Bending moment at B = 17212.5 Ncm
For horizontal plane
𝑇3 +𝑇4 = 637.75 N
Bending moment about C= 0
𝑇3 *60 = 637.75*22.5
𝑇3 = 239.065 N
𝑇4 = 398.68
Bending moment at B = 8964.84 Ncm
2 + 17212.832 = 19407.17 Ncm
̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅
𝑀𝑏 = √8964.87
𝑀𝑡 = 637.75*3.9 = 2487.22 Ncm
𝑇1 *37.5 = 19348.875Ncm
𝜏 = 0.5𝑆𝑢𝑡 /FOS = 125MPa
16
𝜏𝑚𝑎𝑥 = 𝜋𝑑3 √𝑚𝑏2 + 𝑚𝑡2 = 125MPa
𝑑= 1.99 ~ 2cm
25
Figure 26.BMD for horizontal plane.
5.5 Formulas used for theoretical distance covered
•
•
•
•
•
•
•
Weight of the job = m kg
Stiffness of spring = k N/m
Deflection in spring = 𝛿 𝑚
Gravity force of job =spring force
mg = K𝛿
𝛿 = mg/K
𝛿 = θ𝑅𝑃
θ = 𝛿/𝑅𝑃 = 𝑚𝑔/𝐾𝑅𝑃
Angular distance moved by larger sprocket
θ𝑅1 = mg𝑅1 /K𝑅𝑃
Angular displacement moved by small sprocket
= mg 𝑅1 /K𝑅𝑃 . 𝑅2
(θ=angular rotation of pinion)
(𝑅𝑃 =radius of pinion)
(𝑅1 =radius of larger sprocket)
(𝑅2 = radius of small sprocket)
Angular displacement of wheels (𝑥)
𝑥 = mg.𝑅1 .𝑅w /K 𝑅p .𝑅2
(𝑅w = radius of wheel)
26
CHAPTER 6: RESULT AND CONCLUSION
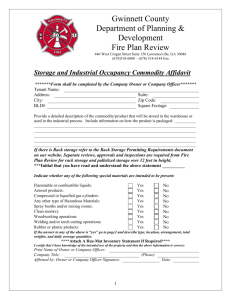
6.1 Comparison between theoretical and practical values
We performed experiments after fabrication. And variation of distance has been analyzed with
respect to the weight placed on it. Initially 5 kg load is placed on the machine and then increased
by 10 kg upto 55 kg and distance is measured each time.
Table 4.Observation table
Weight(kg)
Time(s)
5
Practical
Distance(cm)
0
Percentage error
0
Theoretical
distance(cm)
52
10
47
5.53
140
66.4%
15
83
5.94
211
60.66%
25
183
6.36
357
48.7%
35
307
7.2
492
37.6%
45
400
7.4
633
35.32%
55
560
7.7
759
25.16%
-
9
Time(s) and dsitance(m)
8
7
6
5
4
3
2
1
0
5
10
15
25
Load
35
45
distance(cm)
Figure 27. Graph plot between distance, time and load.
27
55
time(s)
In the above graph blue line represent theoretical values while the other one practical values.
It can be easily observed that both the lines are following the same pattern. There is an error of
approximately 25.16 % between the both the values which can be attributed to the fact that we
have not considered the mass of the components as well as friction between them. The same
pattern between both the lines verifies that the mathematical relation has been correctly
derived.
800
700
Distance(cm)
600
500
400
300
200
100
0
5
10
15
25
35
45
55
Weight(kg)
practical distance(cm)
theoretical distance covered
Figure 28. Graph plot between theoretical and practical distance covered.
6.2 Conclusion
After practical performance of the WOMHD and analysis we get the following results and
conclusions: 1. We have successfully derived mathematical relation between the various
variables for WOMHD
2. WOMHD has been designed and fabricated.
3. The performance of WOMHD has been analyzed both theoretically and practically and a
graph has been plotted after getting the data from the experiment.
28
REFERENCE
1. Balpreet Singh1, Poonam Kumari2, “Design and Fabrication of Weight Operated Material
Handling Device (WOMHD)”, 2022 IJRTI | Volume 7, Issue 6.
2. Mahesh Kadam1, Kedar Kesarkar 2, Shubham Narvekar 3, Prashant Gurav 4, Tanmay
Chaudhari 5, Vyankatesh Koshti, “Design and Development of Weight Operated Material
Handling Device” Journal of Modern Mechanical Systems and Machining Volume 1 Issue 2
September 2018.
3. Fanisam M.BN., Bari Dewa., Mishra Ayush., Mandlik Yogesh and More Harshal, Material
Handling Equipment, International Journal of Recent Scientific Research Vol. 9, Issue, 2(E),
pp. 24083-24085, February, 2018.
4. S. Kamble1, H. Ukande1, T. Savant1, A. Haral1, S. Pawar2, “Material Handling
Equipment”, 2018 IJSRSET | Volume 4 | Issue 7.
5. MD. Muztahid Hasan*, Md. Rafiquzzaman, Salman Polock, “Design and Fabrication of
Self-Weighted Material Handling (SWMH) Equipment” International Conference on
Mechanical, Industrial and Energy Engineering 2020,19-21 December, 2020, Khulna,
BANGLADESH.
6. V.B. Bhandari “Design of machine elements” Tata McGraw hill company publishing
limited, Year of Publication 2007, second edition.
7. DR.V.P. Singh “Theory of machines” Dhanat Rai & Co. Publication, Year of Publication
2017, sixth edition.
8.https://1library.net/document/zln1xd2q-material-handling-equipment-operated-by-jobweight.html Basic diagram WOMHD
9.https://rakagrp.com/handling/blog/types-and-uses-for-material-handling-equipment/ Types
of Material handling devices.
29
APPENDIX
55 kg
weight
Rack
Chain
Pedestal
bearing
P204
Square tube
frame
PPCP wheel
Rear sprocket
Pinion
Shaft
Sprocket
30
20cm spring
extension
560 cm displacement
31