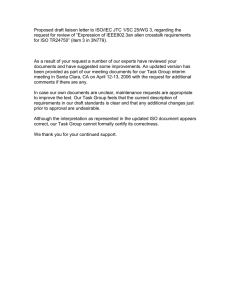
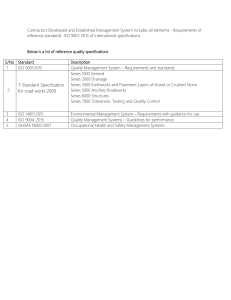
BS ISO 20474‑5:2017 BSI Standards Publication Earth-moving machinery — Safety Part 5: Requirements for hydraulic excavators BS ISO 20474‑5:2017 BRITISH STANDARD National foreword This British Standard is the UK implementation of ISO 20474‑5:2017. The UK participation in its preparation was entrusted to Technical Committee B/513/1, Earth moving machinery (International). A list of organizations represented on this committee can be obtained on request to its secretary. This publication does not purport to include all the necessary provisions of a contract. Users are responsible for its correct application. © The British Standards Institution 2017 Published by BSI Standards Limited 2017 ISBN 978 0 580 81824 0 ICS 53.100 Compliance with a British Standard cannot confer immunity from legal obligations. This British Standard was published under the authority of the Standards Policy and Strategy Committee on 31 July 2017. Amendments/corrigenda issued since publication Date Text affected INTERNATIONAL STANDARD BS ISO 20474‑5:2017 ISO 20474-5 Second edition 2017-07 Earth-moving machinery — Safety — Part 5: Requirements for hydraulic excavators Engins de terrassement — Sécurité — Partie 5: Exigences applicables aux pelles hydrauliques Reference number ISO 20474-5:2017(E) © ISO 2017 BS ISO 20474‑5:2017 ISO 20474-5:2017(E) COPYRIGHT PROTECTED DOCUMENT © ISO 2017, Published in Switzerland All rights reserved. Unless otherwise specified, no part o f this publication may be reproduced or utilized otherwise in any form or by any means, electronic or mechanical, including photocopying, or posting on the internet or an intranet, without prior written permission. Permission can be requested from either ISO at the address below or ISO’s member body in the country o f the requester. ISO copyright o ffice Ch. de Blandonnet 8 • CP 401 CH-1214 Vernier, Geneva, Switzerland Tel. +41 22 749 01 11 Fax +41 22 749 09 47 copyright@iso.org www.iso.org ii © ISO 2017 – All rights reserved BS ISO 20474‑5:2017 ISO 20474-5:2017(E) Contents Page Foreword ........................................................................................................................................................................................................................................ iv Introduction .................................................................................................................................................................................................................................. v 1 2 3 4 Scope ................................................................................................................................................................................................................................. 1 Normative references ...................................................................................................................................................................................... 1 Terms and definitions ..................................................................................................................................................................................... 2 Safety requirements and protective measures ..................................................................................................................... 4 4.1 4.2 4.3 4.4 4. 5 4. 6 5 General ........................................................................................................................................................................................................... 4 Operator station ..................................................................................................................................................................................... 4 4.2.1 Operator protection ...................................................................................................................................................... 4 f ......................................................................................................................... 5 Controls for driving and steering ............................................................................................................................................ 5 Swing brakes ............................................................................................................................................................................................. 5 f .......................................................................................................................................................... 5 4.5.1 General...................................................................................................................................................................................... 5 4.5.2 Bucket and shovel applications ........................................................................................................................... 5 4.5.3 Object-handling applications ................................................................................................................................ 5 f ............................................................................................................. 6 4.6.1 Operator station ............................................................................................................................................................... 6 ...................................................................................................................................................... 6 4.6.3 Operator protection ...................................................................................................................................................... 7 .................................................................................................................................................................................... 7 4.6.5 Retrieval and towing .................................................................................................................................................... 9 4. 2 . 2 Rear windo w de ro s ting sys tem S tab ility and s a ety devices S p ecific requirements o r walking excavato rs 4. 6 . 2 Wheel b rake sys tem 4. 6 . 4 S tab ility Information for use ............................................................................................................................................................................................ 9 Annex A (normative) Requirements for excavator swing brakes ........................................................................................ 10 Annex B (informative) Illustrations .................................................................................................................................................................... 13 Bibliography ............................................................................................................................................................................................................................. 16 © ISO 2017 – All rights reserved iii BS ISO 20474‑5:2017 ISO 20474-5:2017(E) Foreword ISO (the International Organization for Standardization) is a worldwide federation of national standards bodies (ISO member bodies). The work o f preparing International Standards is normally carried out through ISO technical committees. Each member body interested in a subject for which a technical committee has been established has the right to be represented on that committee. International organizations, governmental and non-governmental, in liaison with ISO, also take part in the work. ISO collaborates closely with the International Electrotechnical Commission (IEC) on all matters o f electrotechnical standardization. The procedures used to develop this document and those intended for its further maintenance are described in the ISO/IEC Directives, Part 1. In particular the different approval criteria needed for the di fferent types o f ISO documents should be noted. This document was dra fted in accordance with the editorial rules of the ISO/IEC Directives, Part 2 (see www.iso .org/directives). Attention is drawn to the possibility that some o f the elements o f this document may be the subject o f patent rights. ISO shall not be held responsible for identi fying any or all such patent rights. Details o f any patent rights identified during the development o f the document will be in the Introduction and/or on the ISO list of patent declarations received (see www.iso .org/patents). Any trade name used in this document is in formation given for the convenience o f users and does not constitute an endorsement. For an explanation on the voluntary nature o f standards, the meaning o f ISO specific terms and expressions related to con formity assessment, as well as in formation about ISO’s adherence to the World Trade Organization (WTO) principles in the Technical Barriers to Trade (TBT) see the following URL: www.iso .org/iso/foreword .html This document was prepared by Technical Committee ISO/TC 127, Earth-moving machinery, Subcommittee SC 2, Safety, ergonomics and general requirements. This second edition cancels and replaces the first edition (ISO 20474-5:2008), which has been technically revised with the following changes: — normative references have been updated; — references to national and regional provisions in the withdrawn ISO/TS 20474-14 have been deleted; — new sa fety requirements and protective measures have been added, including requirements for load sa fety devices and the normative annex, Requirements for excavator swing brakes. It is intended to be used in conjunction with ISO 20474-1. A list of all parts in the ISO 20474 series, published under the general title, Earth-moving machinery — Safety, can be found on the ISO website. iv © ISO 2017 – All rights reserved BS ISO 20474‑5:2017 ISO 20474-5:2017(E) Introduction This document is a type-C standard as stated in ISO 12100. The machinery concerned and the extent to which hazards, hazardous situations or hazardous events are covered are indicated in the Scope of this document. When requirements o f this type-C standard are di fferent from those which are stated in type-A or B standards, the requirements o f this type-C standard take precedence over the requirements o f the other standards for machines that have been designed and built according to the requirements of this type-C standard. ISO 20474 provides acceptable sa fety requirements for earth-moving machinery. This standard does not necessarily provide requirements to meet all national and regional regulatory provisions, e.g. Japan does not allow object handling with earth-moving machinery. © ISO 2017 – All rights reserved v BS ISO 20474‑5:2017 BS ISO 20474‑5:2017 INTERNATIONAL STANDARD ISO 20474-5:2017(E) Earth-moving machinery — Safety — Part 5: Requirements for hydraulic excavators 1 Scope This document gives the sa fety requirements specific to hydraulic excavators as defined in ISO 6165. It is intended to be used in conjunction with ISO 20474-1, which specifies general sa fety requirements common to two or more earth-moving machine families. The specific requirements given in this document take precedence over the general requirements of ISO 20474-1. This document deals with all significant hazards, hazardous situations and events relevant to the earthmoving machinery within its scope (see ISO 20474-1:2017, Annex A) when used as intended or under conditions o f misuse reasonably foreseeable by the manu facturer. It specifies the appropriate technical measures for eliminating or reducing risks arising from relevant hazards, hazardous situations or events during commissioning, operation and maintenance. This document is not applicable to machines manufactured before the date of its publication. 2 Normative references The following documents are re ferred to in the text in such a way that some or all o f their content constitutes requirements o f this document. For dated re ferences, only the edition cited applies. For undated re ferences, the latest edition o f the re ferenced document (including any amendments) applies. ISO 3449:2005, Earth-moving machinery — Falling-object protective structures — Laboratory tests and performance requirements ISO 3471, Earth-moving machinery — Roll-over protective structures — Laboratory tests and performance requirements ISO 6165, Earth-moving machinery — Basic types — Identification and terms and definitions ISO 6682, Earth-moving machinery — Zones of comfort and reach for controls ISO 6683, Earth-moving machinery — Seat belts and seat belt anchorages — Performance requirements and tests ISO 7096, Earth-moving machinery — Laboratory evaluation of operator seat vibration ISO 7135, Earth-moving machinery — Hydraulic excavators — Terminology and commercial specifications ISO 7451, Earth-moving machinery — Volumetric ratings for hoe-type and grab-type buckets of hydraulic excavators and backhoe loaders ISO 7546, Earth-moving machinery — Loader and front loading excavator buckets — Volumetric ratings ISO 8643, Earth-moving machinery — Hydraulic excavator and backhoe loader lowering control device — Requirements and tests ISO 10262, Earth-moving machinery — Hydraulic excavators — Laboratory tests and performance requirements for operator protective guards ISO 10567, Earth-moving machinery — Hydraulic excavators — Lift capacity © ISO 2017 – All rights reserved 1 BS ISO 20474‑5:2017 ISO 20474-5:2017(E) ISO 12117, Earth-moving machinery — Tip-over protection structure (TOPS) for compact excavators — Laboratory tests and performance requirements ISO 12117-2:2008, Earth-moving machinery — Laboratory tests and performance requirements for protective structures of excavators — Part 2: Roll-over protective structures (ROPS) for excavators of over 6 t. Amended by ISO 12117-2:2008/Amd 1:2016 ISO 20474-1:2017, Earth-moving machinery — Safety — Part 1: General requirements 3 Terms and definitions For the purposes o f this document, the terms and definitions given in ISO 20474-1, ISO 6165 and ISO 7135, and the following apply. ISO and IEC maintain terminological databases for use in standardization at the following addresses: — ISO Online browsing platform: available at http://www.iso .org/obp — IEC Electropedia: available at http://www.electropedia .org/ 3.1 excavator hydraulic excavator sel f-propelled machine on crawlers, wheels or legs, having an upper structure normally capable o f a 360° swing with mounted equipment (3.3 ), primarily designed for excavating with bucket, without moving the undercarriage during the work cycle Note 1 to entry: An excavator work cycle normally comprises excavating, elevating, swinging and the discharging of material. Note 2 to entry: An excavator can also be used for object or material handling/transportation. Note 3 to entry: Unless specifically identified as a cable excavator, an excavator is commonly re ferred to as a hydraulic excavator. Note 4 to entry: See Annex B for illustrations. [SOURCE: ISO 6165:2012, 4.4, modified — By adding Note 4.] 3.1.1 compact excavator excavator (3.1) with an operating mass 6 000 kg or less Note 1 to entry: See Annex B for illustrations. [SOURCE: ISO 6165:2012, 4.4.4, modified — By adding Note 1.] 3.1.2 walking excavator excavator (3.1) with three or more supporting legs which can be articulated, telescopic or both and which can be fitted with wheels Note 1 to entry: See Annex B for an illustration. [SOURCE: ISO 6165:2012, 4.4.2, modified — By adding Note 1.] 3.2 extra-long reach equipment application application of hydraulic excavator (3.1) equipped with extra-long reach equipment Note 1 to entry: Extra-long reach equipment application includes the following: 2 © ISO 2017 – All rights reserved BS ISO 20474‑5:2017 ISO 20474-5:2017(E) — extra-long front equipment application consisting of an extra-long boom and an extra-long arm with lighter duty bucket for extra wide working range purpose; — telescopic arm application; — telescopic arm with clamshell bucket application; — extra-long front equipment demolition application consisting of an extra-long boom (multi-booms), extralong arm and demolition attachment. 3.3 material handling moving of scrap and loose bulk material, e.g. scrap iron, demolition debris and mulch 3.4 material handling excavator (3.1) purpose-built for material handling and typically equipped with an elevated (fixed or movable) operator station hydraulic excavator 3.5 demolition application demolishing by pushing or pulling, or fragmenting by crushing or shearing, buildings or other civil engineering structures and their component parts 3.6 swing rotation o f the upper structure o f an excavator in relation to a fixed re ference frame on the ground 3.7 working swing revolution speed turntable-swing speed, reached in a 180° revolution of the upper structure with maximum rotation command input starting from a still position Note 1 to entry: It is expressed in revolutions per minute (r/m). 3.8 deceleration swing angle angle measured in degrees of swing while the swing motion is decelerated from working swing revolution speed to a complete stop (halt) 3.9 swing torque torque which propels the upper structure relative to the undercarriage Note 1 to entry: It is expressed in newton metres (N · m). 3.10 swing service brake device or system to decelerate the rotation o f the upper structure and to bring it to a stop in any position EXAMPLE Frictional brake, electrically operated brake, hydrostatically or other hydraulically operated brake. Note 1 to entry: See Annex A. 3.11 swing parking brake device or system to hold the stopped upper structure in a stationary position Note 1 to entry: See Annex A. © ISO 2017 – All rights reserved 3 BS ISO 20474‑5:2017 ISO 20474-5:2017(E) 3.12 swing lock mechanically engaged device designed to block the upper structure in a fixed position with respect to the undercarriage Note 1 to entry: See Annex A. 4 Safety requirements and protective measures 4.1 General Hydraulic excavators shall comply with the sa fety requirements and protective measures o f ISO 20474-1, in as far as those are not modified by the specific requirements o f this clause. 4.2 Operator station 4.2.1 Operator protection 4.2.1.1 Operator protective guard Excavators with an operating mass greater than 1 500 kg shall be designed so that an operator offer a protective guard. The protective guard shall be in accordance with ISO 10262. protective guard can be fitted. The manu facturer, according to the intended use o f the machine, shall NOTE For excavators used in demolition applications, additional requirements exist. 4.2.1.2 Roll-over protective structures (ROPS) and tip-over protective structures (TOPS) 4.2.1.2.1 General Except for walking excavators (see 4.6.3 ), ISO 20474-1:2017, 4.3.3 does not apply. Hydraulic excavators with an operating mass o f 1 000 kg up to 6 000 kg shall be equipped with a TOPS in accordance with ISO 12117. If the structure is compliant with the performance requirements given in both ISO 12117 (TOPS) and ISO 12117-2 (ROPS), the manu facturer may identi fy both standards (TOPS and ROPS) on the label. Hydraulic excavators with an operating mass greater than 6 000 kg and less than 50 000 kg shall be provided with a ROPS in accordance with ISO 12117-2. Material-handling excavators with fixed cab risers and with an operating mass greater than 1 000 kg and less than 50 000 kg shall be fitted with a TOPS. For evaluation of the performance of the TOPS, ISO 12117-2 shall be used in respect of lateral loading only and with the following lateral load energy, Us : Us = 6,500 × (M/10 000) 1,25 The TOPS shall be labelled in accordance with ISO 12117-2:2008, Clause 9, as amended by ISO 12117-2:2008/Amd 1:2016, except that the reference shall be made to ISO 20474-5. Alternatively, in fulfilling this requirement a manu facturer may provide a ROPS in accordance with ISO 12117-2. In such cases, the labelling may either be in accordance with ISO 12117-2 for ROPS or modified as specified above for TOPS. Where a structure complies with both ROPS and TOPS 4 © ISO 2017 – All rights reserved BS ISO 20474‑5:2017 ISO 20474-5:2017(E) per formance requirements, a manu facturer may optionally identi fy both standards (ROPS and TOPS) on the label. NOTE ISO 12117 is intended to be applied to compact excavators having a swing type boom and an operating mass o f between 1 000 kg and 6 000 kg. This does not preclude the possibility o f establishing a reproducible means o f evaluating the load-carrying characteristics o f TOPS under static loading, and prescription o f performance requirements of a representative specimen under such loading for excavators with an operating mass over 6 000 kg. In this case, the test is carried out in accordance with ISO 12117-2. 4.2.1.3 Operator’s seat I f a suspension seat is provided for excavators, the seat shall comply with spectral class EM 6 as given in ISO 7096:2008. 4.2.2 Rear window defrosting system ISO 20474-1:2017, 4.3.2.7, shall only apply for rear window de frosting i f visibility through the rear window is required according to ISO 20474-1, 4.8.1. 4.3 Controls for driving and steering ISO 20474-1:2017, 4.5.1 and 4.6.1 shall apply with the following addition/exception: the movements o f the controls for driving and steering do not need to correspond to the intended direction of movement if the upper structure is not in the normal driving direction. 4.4 Swing brakes Swing brakes shall comply with the requirements given in Annex A. NOTE Requirements can differ for excavators with extra-long reach equipment. 4.5 Stability and safety devices 4.5.1 General ISO 20474-1:2017, 4.11 shall apply with the additions given in 4.5.2 to 4.5.4 below. NOTE All rated capacities as defined herea fter are based on tests, calculations, or both, o f machines on a level and firm supporting sur face. The mass o f the load, its density and the location o f its centre o f gravity, as well as the mass o f the attachment and the quick coupler, i f fitted, shall be included in the determination o f the rated operating load and the size/capacity o f the attachment. In order to provide su fficient stability, the rated operating load in intended operations shall be determined as specified in 4.5.2 and 4.5.3. 4.5.2 Bucket and shovel applications The rated li ft capacity o f an excavator used in a bucket or shovel application shall be determined according to ISO 10567. The volumetric rating of the bucket or shovel shall be determined according to ISO 7451 or ISO 7546. 4.5.3 4.5.3.1 Object-handling applications General The capacity o f excavators shall be determined in accordance with 4.5.3.2 and 4.5.3.3. © ISO 2017 – All rights reserved 5 BS ISO 20474‑5:2017 ISO 20474-5:2017(E) 4.5.3.2 Rated lift capacity in object handling The rated li ft capacity in object handling shall be defined by its rated li ft capacity according to ISO 10567. 4.5.3.3 Rated lift capacity table in object handling A table o f the rated li ft capacity in object handling, established by the manu facturer, shall be provided in accordance ISO 10567. The tables shall be available at the operator’s station for each object-handling configuration specified in the operator’s manual. 4.5.3.4 Load safety devices Excavators used in object-handling operations with a maximum rated li ft capacity o f ≥ 1 000 kg, according to ISO 10567 or an overturning moment o f ≥ 40 000 N · m shall have provisions for the following. a) An acoustic or visual warning device which indicates to the operator when the rated li ft capacity/ corresponding load moment is reached and continues as long as the li ft capacity or load moment is exceeded. The rated li ft capacity is defined in 4.5.3.2. This device may be deactivated while the excavator is per forming operations other than object handling. The activation shall be clearly indicated. The control device for activation and deactivation shall be within the operator’s zone of comfort according to ISO 6682. A warning sign shall be placed close to the control device indicating the need for activation during object handling. b) A lowering control device on each raising boom and arm cylinder to prevent uncontrolled movement in the case o f a hydraulic line failure or rupture. For each arm cylinder the device shall be installed at the end which is pressurized to raise the arm away from the base machine. The lowering control device for each boom and arm cylinder shall be tested in accordance with ISO 8643. 4.5.3.5 Other applications The rated li ft capacity o f material-handling excavators and derivative machinery shall be determined by the manu facturer according to the load specification given in 4.5.3.2 and 4.5.3.3 and considering the comparable hazard. 4 . 6 S p e c i f i c r e q u i r e m e 4.6.1 Operator station 4.6.1.1 Steering system n t s f o r w a l k i n g e x c a v a t o r s ISO 20474-1:2017, 4.6.1, is not applicable. 4.6.1.2 Visibility ISO 20474-1:2017, 4.8.1, is not applicable. The ground contacting part of each leg in all possible positions shall be visible from the operator’s station in order to ensure that the operator can place the legs on firm ground. 4.6.2 Wheel brake system ISO 20474-1:2017, 4.7, is not applicable to walking excavators having a maximum of two wheels. 6 © ISO 2017 – All rights reserved BS ISO 20474‑5:2017 ISO 20474-5:2017(E) 4.6.3 4.6.3.1 Operator protection Roll-over protective structures (ROPS) Walking excavators shall be fitted with ROPS in accordance with ISO 3471, as applicable in that International Standard to backhoe loaders of equivalent mass. 4.6.3.2 Restraint systems All walking excavators fitted with a cab shall be equipped with an operator restraint system in accordance with ISO 6683. 4.6.3.3 Falling-object protective structure (FOPS) Walking excavators shall be designed so that a FOPS in accordance with ISO 3449:2005, level II, can be fitted (see also ISO 20474-1:2017, 4.3.4). 4.6.3.4 Legs, hydraulic circuit All leg cylinders shall be fitted with lock valves to prevent the machine from becoming unstable in the case o f a hydraulic system failure. 4.6.4 4.6.4.1 Stability Test conditions The stability shall be determined under the following test conditions: a) on a level and firm supporting test sur face; b) with stabilizer and wheels (at maximum spread position) extended as specified by the manufacturer; c) with the lower side o f the undercarriage at a levelled position o f approximately 350 mm above the test surface; d) with tipping lines as shown in Figure 1; e) at maximum reach with/without telescopic arm to the front/rear, as shown in Figure 2, and to the side as shown in Figure 3. © ISO 2017 – All rights reserved 7 BS ISO 20474‑5:2017 ISO 20474-5:2017(E) Figure 1 — Tipping lines of walking excavators Dimensions in metres Key 1 2 3 fully extended fully retracted measuring line Figure 2 — Measurement of rated tipping load to front/rear 8 © ISO 2017 – All rights reserved BS ISO 20474‑5:2017 ISO 20474-5:2017(E) Dimensions in metres Key 1 2 3 fully extended fully retracted measuring line Figure 3 — Measurement of rated tipping load to the side 4.6.4.2 Bucket applications T he c ap acity o f wa l king e xc avator i n bucke t appl ic ation s sha l l b e de term i ne d accord i ng to I S O 10 5 67. The volumetric rating of the bucket shall be determined in accordance with ISO 7451. 4.6.4.3 Object-handling applications T he rate d l i ft c ap ac ity i n obj e c t h and l i ng s ha l l b e de term i ne d accord i ng to I S O 10 5 67. 4.6.5 Retrieval and towing I S O 2 0 474 -1 : 2 017, 4.1 5 , sh a l l apply, excep t for I S O 2 0 474 -1 : 2 017, 4.1 5 . 2 and 4.1 5 . 5 . 5 Information for use I S O 2 0 474 -1 : 2 017, 6 . 2 , sh a l l apply with the fol lowi ng add ition s: — a de s c rip tion o f the exc avator con figu ration re qu i re d i f i ntende d to b e u s e d for obj e c t hand l i ng; — a de s c rip tion o f e xc avator s tabi l ity i n d i fferent appl ic ation s; — a description of special precautions for walking excavators; — i n s truc tion s for op eration o f the lo ad s a fe ty device s , i f fitte d; — where appl icable, a table o f the rate d l i ft c ap acity i n obj e c t ha nd l i ng; — instructions for the selection and use of operator protective guards, e.g. top guard, front guard (see 4.2.1.1), appropriate for the application. © ISO 2017 – All rights reserved 9 BS ISO 20474‑5:2017 ISO 20474-5:2017(E) Annex A (normative) Requirements for excavator swing brakes A.1 General Annex A s p e ci fie s m i n i mu m p er formance criteri a a nd te s t me tho d s for the s wi ng s er vice bra ke, s wi ng p arki ng bra ke a nd s wi ng lo ck o f hyd rau l ic e xc avators . A.2 Minimum performance A.2.1 Swing movement A.2.1.1 Test-swing revolution speed The test-swing revolution speed shall be the working swing revolution speed. A.2.1.2 Deceleration swing angle, βB The deceleration swing angle, βB , shall be less than the higher of the following values: βB = 90° or βB = where n 2 ⋅ 360 2 ⋅ n B′ + β B0 is the test-swing revolution speed (min ); n B′ = 250 (min ); βB0 = 40°. n −1 −2 A.2.2 Swing service brake The swing service brake shall be capable of decelerating the upper structure to a complete stop from A.2.1.1. A disconnection of the swing service brake shall not be possible. See Figure A.1. the te s t s wi ng revolution s p e e d a s s p e c i fie d i n 10 © ISO 2017 – All rights reserved BS ISO 20474‑5:2017 ISO 20474-5:2017(E) Key X upperstructure revolutions, r/min−1 Y deceleration swing angle, ° Figure A.1 — Swing service brake During no less than 10 tests the deceleration swing angle shall not exceed by more than 20 % the deceleration swing angle βB (see A.2.1.2). These tests shall be made at a sequence rate as rapid as the swing acceleration and deceleration will allow. A.2.3 Swing parking brake The swing parking brake shall be capable of holding the upper structure for 30 min in the maximum slope and in the most un favourable position o f the upper structure, as specified by the manu facturer. The working equipment shall be extended to maximum radii with the empty bucket in rollout position. The swing parking brake shall apply automatically in case o f engine stop or shall be capable o f being manually applied, with and without the engine running. The swing parking brake shall remain e ffective when the source o f energy fails. The swing parking brake on excavators with an operating mass ≥6 000 kg shall be fully mechanical, e.g. spring friction brake. On excavators with an operating mass <6 000 kg the swing parking brake may be a hydraulic lock valve applied directly to the swing motor and i f so a separate swing lock according to A.2.4 shall be provided. NOTE 1 The above requirement o f a fully mechanical swing parking brake is not intended to prevent future development o f other types o f technology providing equivalent sa fety. NOTE 2 A swing parking brake could per form as an emergency brake in case o f hose failure. Excavators with an operating mass <1 000 kg do not require a swing parking brake. A.2.4 Swing lock The swing lock shall be capable of withstanding without permanent deformation the maximum swing motor torque. A swing lock is not required i f its function is provided by the swing parking brake. © ISO 2017 – All rights reserved 11 BS ISO 20474‑5:2017 ISO 20474-5:2017(E) A.3 Test conditions The tests shall be made with the standard equipment specified by the manu facturer. Outriggers and blade, i f present, shall be placed on the ground in their working position as specified by the manufacturer. All fluid system shall be filled as specified by the manu facturer. The fuel tank shall be at least hal f full. The swing system pressures shall be adjusted and function as specified by the manu facturer. The test for the swing service brake to define the test swing revolution speed according to A.2.1.1 and deceleration swing angle according to A.2.1.2 shall be made with the working equipment extended to maximum radii with the empty bucket in rollout position. The measurement starts with the actuation of the braking at test swing revolution speed. For the test o f the service swing brake and the swing lock, the machine shall be positioned on a flat sur face with a maximum gradient slope o f ± 1 %. A.4 Test report The test report shall contain the following information: — machine manufacturer; — model and serial-number; — machine specification; — result of test. 12 © ISO 2017 – All rights reserved BS ISO 20474‑5:2017 ISO 20474-5:2017(E) Annex B (informative) Illustrations See Figures B.1 to B.5. Figure B.1 — Crawler excavator Figure B.2 — Compact crawler excavator © ISO 2017 – All rights reserved 13 BS ISO 20474‑5:2017 ISO 20474-5:2017(E) Figure B.3 — Wheeled excavator Figure B.4 — Compact wheeled excavator 14 © ISO 2017 – All rights reserved BS ISO 20474‑5:2017 ISO 20474-5:2017(E) Figure B.5 — Walking excavator © ISO 2017 – All rights reserved 15 BS ISO 20474‑5:2017 ISO 20474-5:2017(E) Bibliography Earth-moving machinery — Determination of ground speed [1] I S O 6 0 14 , [2 ] ISO [3 ] ISO 8 0 8 4, ISO 1 2 10 0 , [4] 16 Earth-moving machinery — Methods of measuring the masses of whole machines, their equipment and components 6 016 , Machinery for forestry — Operator protective structures — Laboratory tests and performance requirements reduction Safety of machinery — General principles for design — Risk assessment and risk © ISO 2017 – All rights reserved BS ISO 20474‑5:2017 BS ISO 20474‑5:2017 ISO 20474-5:2017(E) ICS 53.100 Price based on 16 pages © ISO 2017 – All rights reserved This page deliberately left blank NO COPYING WITHOUT BSI PERMISSION EXCEPT AS PERMITTED BY COPYRIGHT LAW British Standards Institution (BSI) BSI is the national body responsible for preparing British Standards and other standards-related publications, information and services. BSI is incorporated by Royal Charter. British Standards and other standardization products are published by BSI Standards Limited. About us Reproducing extracts We bring together business, industry, government, consumers, innovators and others to shape their combined experience and expertise into standards -based solutions. For permission to reproduce content from BSI publications contact the BSI Copyright & Licensing team. The knowledge embodied in our standards has been carefully assembled in a dependable format and ref ned through our open consultation process. Organizations of all sizes and across all sectors choose standards to help them achieve their goals. Information on standards We can provide you with the knowledge that your organization needs to succeed. Find out more about British Standards by visiting our website at bsigroup.com/standards or contacting our Customer Services team or Knowledge Centre. Buying standards You can buy and download PDF versions of BSI publications, including British and adopted European and international standards, through our website at bsigroup.com/shop, where hard copies can also be purchased. If you need international and foreign standards from other Standards Development Organizations, hard copies can be ordered from our Customer Services team. Copyright in BSI publications All the content in BSI publications, including British Standards, is the property of and copyrighted by BSI or some person or entity that owns copyright in the information used (such as the international standardization bodies) and has formally licensed such information to BSI for commercial publication and use. Save for the provisions below, you may not transfer, share or disseminate any portion of the standard to any other person. You may not adapt, distribute, commercially exploit, or publicly display the standard or any portion thereof in any manner whatsoever without BSI’s prior written consent. Storing and using standards Standards purchased in soft copy format: • A British Standard purchased in soft copy format is licensed to a sole named user for personal or internal company use only. • The standard may be stored on more than 1 device provided that it is accessible by the sole named user only and that only 1 copy is accessed at any one time. • A single paper copy may be printed for personal or internal company use only. Standards purchased in hard copy format: • A British Standard purchased in hard copy format is for personal or internal company use only. • It may not be further reproduced – in any format – to create an additional copy. This includes scanning of the document. If you need more than 1 copy of the document, or if you wish to share the document on an internal network, you can save money by choosing a subscription product (see ‘Subscriptions’). Subscriptions Our range of subscription services are designed to make using standards easier for you. For further information on our subscription products go to bsigroup.com/subscriptions. With British Standards Online (BSOL) you’ll have instant access to over 55,000 British and adopted European and international standards from your desktop. It’s available 24/7 and is refreshed daily so you’ll always be up to date. You can keep in touch with standards developments and receive substantial discounts on the purchase price of standards, both in single copy and subscription format, by becoming a BSI Subscribing Member. PLUS is an updating service exclusive to BSI Subscribing Members. You will automatically receive the latest hard copy of your standards when they’re revised or replaced. To f nd out more about becoming a BSI Subscribing Member and the bene f ts of membership, please visit bsigroup.com/shop. With a Multi-User Network Licence (MUNL) you are able to host standards publications on your intranet. Licences can cover as few or as many users as you wish. With updates supplied as soon as they’re available, you can be sure your documentation is current. For further information, email subscriptions@bsigroup.com. Revisions Our British Standards and other publications are updated by amendment or revision. We continually improve the quality of our products and services to benef t your business. If you f nd an inaccuracy or ambiguity within a British Standard or other BSI publication please inform the Knowledge Centre. Useful Contacts Customer Services Tel: +44 345 086 9001 Email (orders): orders@bsigroup. com Email (enquiries): cservices@bsigroup. com Subscriptions Tel: +44 345 086 9001 Email: subscriptions@bsigroup. com Knowledge Centre Tel: +44 20 8996 7004 Email: knowledgecentre@bsigroup.com Copyright & Licensing Tel: +44 20 8996 7070 Email: copyright@bsigroup. com BSI Group Headquarters 389 Chiswick H igh Road London W4 4AL UK