arXiv:2108.08482v1 [cs.CV] 19 Aug 2021
VIL-100: A New Dataset and A Baseline Model for
Video Instance Lane Detection
Yujun Zhang1 *, Lei Zhu2 *, Wei Feng1†, Huazhu Fu3 , Mingqian Wang1 ,
Qingxia Li4 , Cheng Li1 , and Song Wang1,5
1
Tianjin University, 2 University of Cambridge, 3 Inception Institute of Artificial Intelligence,
4
Automotive Data of China (Tianjin) Co., Ltd, 5 University of South Carolina
#186
#027
#000
#042
#084
#030
#000
#000
#060
#234
#135
#033
#075
#099
#075
#057
#060
#120
#270
#174
#063
#102
#132
#150
#180
#120
#165
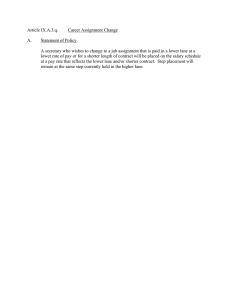
Figure 1: Our proposed Video Instance Lane Detection (VIL-100) dataset contains different real traffic scenarios, and
provides the high-quality instance-level lane annotations.
Abstract
Lane detection plays a key role in autonomous driving.
While car cameras always take streaming videos on the
way, current lane detection works mainly focus on individual images (frames) by ignoring dynamics along the video.
In this work, we collect a new video instance lane detection
(VIL-100) dataset, which contains 100 videos with in total
10,000 frames, acquired from different real traffic scenarios. All the frames in each video are manually annotated to
a high-quality instance-level lane annotation, and a set of
frame-level and video-level metrics are included for quantitative performance evaluation. Moreover, we propose a new
baseline model, named multi-level memory aggregation network (MMA-Net), for video instance lane detection. In our
approach, the representation of current frame is enhanced
by attentively aggregating both local and global memory
features from other frames. Experiments on the new collected dataset show that the proposed MMA-Net outperforms state-of-the-art lane detection methods and video object segmentation methods. We release our dataset and code
at https://github.com/yujun0-0/MMA-Net.
fundamental and challenging task is lane detection in traffic scene understanding. Lane detection assists car driving
and could be used in advanced driving assistance system
(ADAS) [28, 27, 42]. However, accurately detecting lanes
in real traffic scenarios is very challenging, due to many
harsh scenarios, e.g., severe occlusion, bad weather conditions, dim or dazzle light.
In recent years, autonomous driving has received numerous attention in both academy and industry. One of the most
With the advancement of deep learning, lane detection
has achieved significant progress in recent years by annotating and training on large-scale real data [25, 37, 14, 30, 33].
However, most of the existing methods are focused on
image-based lane detection, while in autonomous driving,
car camera always collects streaming videos. It is highly
desirable to extend deep-learning based lane detection from
image level to video level since the latter can leverage temporal consistency to resolve many in-frame ambiguities,
such as occlusion, lane damage etc. The major obstacle
for this extension is the lack of a video dataset with appropriate annotations, both of which are essential for deep
network training. Existing lane datasets (e.g., TuSimple
[43], Culane [33], ApolloScape [15] and BDD100K [49])
either support only image-level detection or lack temporal
instance-level labels. However, according to the United Nations Regulation No.157 [1] for autonomous and connected
vehicles, continuous instance-level lane detection in videos
is indispensable for regular/emergency lane change, trajectory planning, autonomous navigation, etc.
* Yujun Zhang and Lei Zhu are the joint first authors of this work.
† Wei Feng (wfeng@ieee.org) is the corresponding author.
To address above issues, in this work, we first collect a
new video instance lane detection (VIL-100) dataset (see
1. Introduction
Figure 1 for examples). It contains 100 videos with 10,000
frames, covering 10 common line-types, multiple lane instances, various driving scenarios, different weather and
lighting conditions. All the video frames are carefully annotated with high-quality instance-level lane masks, which
could facilitate the community to explore further in this
field. Second, we develop a new baseline model, named
multi-level memory aggregation network (MMA-Net).
Our MMA-Net leverages both local memory and global
memory information to enhance multiple CNN features extracted from the current key frame. To be specific, we
take past frames of the original video to form a local
memory and past frames of a shuffled ordered video as a
global memory, and the current video frame as the query
is segmented using features extracted from video frames
of both local memory and global memory. A local and
global memory aggregation (LGMA) module is devised
to attentively aggregate these multi-level memory features,
and then all CNN features are integrated together to produce the video instance lane detection results. Finally,
we present a comprehensive evaluation of 10 state-ofthe-art models on our VIL-100 dataset, making it the
most complete video instance-level lane detection benchmark. Results show that our MMA-Net significantly outperforms existing methods, including single-image lane detectors [25, 37, 14, 30, 33], and video instance object segmentation methods [18, 50, 32, 24, 44].
2. Related Works
Lane detection datasets. Large-scale datasets are important for deep learning methods. Several public datasets,
such as Caltech-Lanes [2], TuSimple [43], Culane [33],
ApolloScape [15] and BDD100K [49], have been used for
lane detection study. Table 1 provides a comparison of
VIL-100 and other public available datasets from different
perspectives. Caltech-Lanes only contains 1,224 images
and is usually not used for training deep networks, while
TuSimple and Culane provide large-scale image data with
instance-level lane annotations. However, we are interested
in video instance lane detection in this paper, for which both
TuSimple and Culane are not applicable. BDD100K and
ApolloScape are two large-scale video datasets for driving.
However, these two datasets do not provide annotations of
lane instances – on each frame, multiple lanes of the same
kind are not separated and annotated with one label. Laneinstance detection is important for regular/emergency lane
change, trajectory planning, autonomous navigation in autonomous driving, and we provide video-level lane-instance
annotations on our collected VIL-100 dataset. In our VIL100, we increase six lanes annotated at a time by including
more complex scenes. In addition, we annotate the relative location of each lane to the camera-mounted vehicle in
VIL-100 and such location information was not annotated
on any previous datasets.
Lane detection. Early lane detection methods mostly
relied on hand-crafted features, such as color [41, 45],
edge [9, 22, 27] and texture [23]. Recently, the use of deep
neural networks [39, 16, 30] has significantly boosted the
lane detection performance. In VPGNet [20], vanishing
points were employed to guide a multi-task network training for lane detection. SCNN [33] specifically considers the
thin-and-long shape of lanes by passing message between
adjacent rows and columns at a feature layer. SAD [14] and
inter-region affinity KD [13] further adopt the knowledge
distillation to improve lane detection. PolyLaneNet [3] formulates the instance-level lane detection as a polynomialregression problem, and UFSA [37] provides ultra-fast lane
detection by dividing the image into grids and then scanning
grids for lane locations. Recently, GAN [10] and Transformer [25] are also used for detecting lanes. Different from
the above methods that detect lanes from individual images, this paper addresses video lane detection, for which
we propose a new VIL-100 dataset and a baseline MMANET method.
Video object segmentation. General-purpose video object segmentation (VOS) methods can also be adapted for
video lane detection. Existing VOS methods can be divided into two categories: zero-shot methods and oneshot methods. They differ in that the latter requires the
true segmentation on the first frame while the former does
not. For zero-shot VOS, traditional methods are usually
based on heuristic cues of motion patterns [19, 31], proposals [21, 36] and saliency [8, 47]. Recent deep-learning
based methods include the two-stream FCN [7, 17] that integrates the target appearance and motion features. Recurrent networks [34, 44] are also used for video segmentation
by considering both spatial and temporal consistency. For
the one-shot VOS, earlier methods usually compute classical optical flow [29, 11, 46] for inter-frame label propagation. Recent deep-network based methods [4, 38, 32, 18, 50]
include GAM [18], which integrates a generative model
of the foreground and background appearance to avoid online fine-tuning. TVOS [50] suggests a deep-learning based
approach for inter-frame label propagation by combining
the historical frames and annotation of the first frame.
STM [32] uses the memory network to adaptively select
multiple historical frames for helping the segmentation on
the current frame. STM exhibits superior performance on
many available tasks and we take it as the baseline to develop our proposed MMA network.
3. Our Dataset
3.1. Data Collection and Split
VIL-100 dataset consists of 100 videos, 100 frames per
video, in total 10,000 frames. The fps rate of all the videos
Table 1: Comparisons of our dataset and existing lane detection datasets. ‘#Frames’ column shows the number of annotatedframes and the total number of frames. While TuSimple provides a video dataset, it only annotates the last frame of each
video and supports image-level lane detection.
Dataset
Size
Lane detecion on
#Videos
Caltech Lanes
2008 [2]
TuSimple
2017 [43]
Average
Length
#Frames
1224/
1224
6.4K/
128K
Instance-level
Annotation
Maximum
#Lanes
Diversity
Lane
Line-type
Location
-
!
4
-
-
1s
!
5
-
-
133K/
133K
-
!
4
-
-
235
115K/
115k
16s
%
-
-
13
Video
100K
100K/
120M
40s
%
-
-
11
Video
100
10K/
10K
10s
!
6
8
10
Video
4
Image
6.4K
Culane
2017 [33]
Image
-
ApolloScape
2019 [15]
Video
BDD100K
2020 [49]
VIL-100(ours)
2021
Scenario
light traffic,
day
light traffic,
day
multi-weather,
multi-traffic scene,
day & night
multi-weather,
multi-traffic scene,
day & night
multi-weather,
multi-traffic scene,
day & night
multi-weather,
multi-traffic scene,
day & night
Resolution
640 × 480
1280 × 720
1640 × 590
3384 × 2710
1280 × 720
640 × 368
∼
1920 × 1080
3.2. Annotation
(a)
(b)
Figure 2: (a) Co-occurrence of different scenarios. (b) Scenario statistics of the proposed VIL-100.
4,370
Image Number
3,371
1,566
503
175
(a)
(b)
0
13
Lane Number
Figure 3: (a) Distributions of 10 line-types in our VIL-100.
(b) Video frame statistics of the number of annotated lanes
in our VIL-100.
is 10, by down-sampling from 30fps videos. Among these
100 videos, 97 are collected by monocular forward-facing
camera mounted near the rear-view mirror. The remaining 3
videos are collected from Internet and they are taken in hazy
weather, which increases the complexity and reality of the
collected dataset. We consider 10 typical scenarios in data
collection: normal, crowded, curved road, damaged road,
shadows, road markings, dazzle light, haze, night, crossroad. Other than the normal one, the latter nine of them
usually bring more challenges to lane detection. We split
the dataset to training set and test set according to the ratio
of 8:2, and all 10 scenarios are presented in both training
and test sets. This can facilitate the consistent use of and
fair comparison of different methods on our dataset.
For each video, we place a sequence of points positioned
along the center line of each lanes in each frame and store
them in json-format files. Points along each lane are stored
in one group, which provides the instance-level annotation
in our work. We then fit each group of points into a curve
by third-order polynomials, and expand it into a lane-region
with a certain width. Empirically, on 1,920 × 1,080 frames,
we select the width to be 30 pixels. For lower-resolution
frames, the width is reduced proportionally. We further annotate each lane as one of the 10 line-types, i.e., single white
solid, single white dotted, single yellow solid, single yellow
dotted, double white solid, double yellow solid, double yellow dotted, double white solid dotted, double white dotted
solid, double solid white and yellow. In each frame, we
also assign an number label to reflect its relative position
to the ego vehicle, i.e., an even label 2i indicates the i-th
lane to the right of vehicle while an odd label 2i − 1 indicates the i-th lane to the left of vehicle. In VIL-100, we set
i = 1, 2, 3, 4 that enables us to annotate as many as eight
lanes in a frame.
3.3. Dataset Features and Statistics
While we consider 10 scenarios in data collection, multiple scenarios may co-occur in the same video, or even in
the same frame. Actually 17% of the video frames contain
multiple scenarios, and Figure 2 (a) shows the frame-level
frequency of such co-occurrence of the 10 scenarios in VIL100. Meanwhile, one scenario may occur only in part of the
video. For example, in video, the scenario may change from
‘normal’ to ‘crossroad’, and then get back to ‘normal’ again
in the frames corresponding to ‘crossroad’, there should be
no lane detected. Figure 2 (b) shows the total number of
frames for each scenario – a frame with co-occurred sce-
Local memory
Memory:
past frames with object mask
𝐻𝑡−5 , 𝐻𝑡−4 , … , 𝐻𝑡−1
𝐿𝑡−5 , 𝐿𝑡−4 , … , 𝐿𝑡−1
ordered video frames
LGMA
Module
𝐼𝑡−5 , 𝐼𝑡−4 , … , 𝐼𝑡−1
LGMA
Module
Global memory
Encoder
𝐿 𝑡−5 , 𝐿 𝑡−4 , … , 𝐿 𝑡−1
shuffled video frames
𝑡−5 , 𝐻
𝑡−4 , … , 𝐻
𝑡−1
𝐻
Query:
current frame
𝐼መ𝑡−5 , 𝐼መ𝑡−4 , … , 𝐼መ𝑡−1
MR
Module
𝐿𝑡
Supervision
MR
Module
𝐻𝑡
Frame 𝐼𝑡
Encoder
Decoder
𝑆𝑡
Figure 4: The schematic illustration of our multi-level memory aggregation network (MMA-Net) for video instance lane
detection. “LGMA” denotes the local-global memory aggregation module while “MR” module is the memory read module.
narios is counted for all present scenarios.
As shown in Table 1, our VIL-100 contains 10 line-types
and provides 6 annotated lanes at most in video frames.
Specifically, Figure 3(a) shows the number of annotated
lanes for 10 line-types,while Figure 3(b) presents the number of video frames with different annotated lanes, showing that 3,371 video frames have 5 annotated lanes and 13
frames have 6 annotated lanes in our VIL-100.
4. Proposed Method
Figure 4 shows the schematic illustration of our multilevel memory aggregation network (MMA-Net) for video
instance lane detection. Our motivation is to learn memorybased features to enhance low-level and high-level features
of each target video frame for video instance lane detection. The memory features are obtained by integrating a local attentive memory information from the input video and a
global attentive memory information from a shuffled video.
Our MMA-Net starts by randomly shuffling an ordered
video index sequence {1, ..., T } of the input video (T
frames) to obtain a shuffled index sequence, which is then
utilized to generating a shuffled video by taking all corresponding video frames of the input video based on the shuffled video index sequence. To detect lane regions of a target video frame (i.e., It of Figure 4), we then take five past
frames ({It−5 , It−4 , ..., It−1 }) of the original video and five
past frames ({Ibt−5 , Ibt−4 , ..., Ibt−1 }) of the shuffled video as
the inputs. Then, we pass each video frame to a CNN encoder consisting of four CNN layers to obtain a high-level
feature map (H) and a low-level feature map (L). By doing
so, we can construct a local memory (denoted as Ml ) by
storing five low-level features and five high-level features
from {It−5 , It−4 , ..., It−1 }, and form a global memory (denoted as Mg ) to contain five low-level features and five
high-level features from {Ibt−5 , Ibt−4 , ..., Ibt−1 }. After that,
we develop a local-global memory aggregation (LGMA)
module to integrate all low-level features at Ml and Mg ,
and another LGMA module to fuse all high-level features at
Ml and Mg . We use Lma and Hma to denote output features of two LGMA modules. Then, we pass Lma and the
low-level features Lt of the target video frame It to a memory read (MR) module for enhancing Lt by computing their
non-local similarities. We also refine the high-level features
Ht of the target video frame It by passing it and Hma into
another MR module. Finally, we follow other memory networks [32] to adopt a U-Net decoder to progressively fuse
features at different CNN layers and predict a video instance
lane detection map for the target video frame It .
4.1. Local and Global Memory Aggregation Module
Existing memory networks [32, 5, 26, 40, 48] utilized a
regular sampling on every N frames to include close and
distant frames, but all sampled frames are ordered, and extracted features may depend so much on temporal information. In contrast, we devise a local-global memory aggregation (LGMA) module to utilize five frames from a shuffled video in global memory to remove the temporal order
and enhance the global semantic information for detecting
lanes. More importantly, due to varied contents of differ-
Local memory
1×1
conv
Attention
Block
3×3
conv
3×3
conv
value maps
features
(ordered video)
key maps
Attention
Block
C
𝑊5
𝑍5
Attention
Block
𝑘
𝑍𝑎𝑡𝑡
𝑣
𝑍𝑎𝑡𝑡
𝑊3
𝑍3
𝑍2
𝑍1
Attention
Block
value maps
𝑊4
𝑍4
key maps
features
(shuffled video)
1×1
W
conv
split
& softmax
Global memory
(a) LGMA Module
𝑊2
channel-wise
multiplication
𝑍𝑎𝑡𝑡
𝑊1
C Concatenate
Element-wise add
(b) Attention Block
Figure 5: Schematic illustration of (a) our local and global memory aggregation (LGMA) module, and (b) our attention block.
These input five features of LGMA module can be low-level features or high-level features; see Figure 4. And these input
features {Z1 , Z2 , . . . , Z5 } of our attention block can be these five key maps or five value maps of our LGMA module.
ent video frames, memory features from different frames
should have varied contributions for helping the current
video frame to identify the background objects. Hence, we
leverage an attention mechanism to learn attention maps to
automatically assign different weights on both local memory features and global memory features.
Figure 5 (a) shows the schematic illustration of the developed LGMA module, which takes five features from the input video and five features from the shuffled video. We first
follow the original memory network [32] to extract a pair
of key and value maps by applying two 3×3 convolutional
layers on each input feature map. Then, we pass key maps
of the local memory to an attention block for a weighted
average on them, fuse key maps of the global memory by
passing them into another block, add these features obtained
from two attention block to produce a output key map (denoted as Zkatt ) of the LGMA module. Meanwhile, we generate of the output value map (denoted as Zvatt ) of our LGMA
module by adding these generated features of two attention
blocks, which aim to aggregate the value maps of the local
memory and the global memory, respectively. Mathematically, the output key map Zkatt and the output value map
Zvatt of our LGMA module are computed as:
L
L
G
G
G
Zkatt = fatt (kL
1 , k2 , . . . , k5 ) + fatt (k1 , k2 , . . . , k5 ) ,
Zvatt = fatt (v1L , v2L , . . . , v5L ) + fatt (v1G , v2G , . . . , v5G ) ,
(1)
where fatt (·) denotes an attention block to attenL
L
tively integrate memory features. {kL
1 , k2 , . . . , k5 } and
L
L
L
{v1 , v2 , . . . , v5 } denote key maps and value maps of five
G
G
input features of the local memory. {kG
1 , k2 , . . . , k5 } and
G
G
G
{v1 , v2 , . . . , v5 } are key maps and value maps of five input features of the global memory. As shown in our framework of Figure 4, we pass these low-level features of both
the local memory and the global memory into a LGMA
module to aggregate them for generating a pair of key map
and value map (denoted as L(Zkatt ) and L(Zvatt )). Also, another LGMA module is devised to aggregate the high-level
features of both the local memory and the global memory,
and these two output key and value maps are denoted as
G(Zkatt ) and G(Zvatt ); see Figure 4.
Attention block. Figure 5 (b) shows the developed attention block to attentively integrate input five feature maps
{Z1 , Z2 , . . . , Z5 }, which can be the five key maps or five
value maps features of Figure 5 (a). Specifically, we first
concatenate five input maps and then utilize a 1×1 convolutional layer, two successive 3×3 convolutional layer, a 1×1
convolutional layer, and a Softmax function on the concatenated feature map to produce an attention map W with five
feature channels. Then, we multiply each channel of W
with these input five maps, and then we add these multiplication results together to produce an output map (Zatt ) of
the attention block. Hence, Zatt is computed as
Zatt =
5
X
O
(Wi
Zi ) ,
(2)
i=1
where {Z1 , Z2 , . . . , Z5 } denotes all five input maps of our
attention block, and they can be five key maps or five value
maps of LGMA module; see Figure
N 5 (a). Wi is the i-th
channel of the attention map W.
is the multiplication of
Wi and Zi .
4.2. Implementation Details
Memory read module. Following the original memory
network [32], we also develop a memory read (MR) module
to retrieve the relevant memory information (i.e, the key and
value map of our LGMA module; see Figure 5 (a)) for the
query frame (i.e., the target video frame It of Figure 4).
Specifically, we first apply two 3×3 convolutional layers on
features of the query frame It to obtain a pair of key map
and value map, Then, the MR module first obtains an nonlocal affinity matrix by computing similarities between all
pixels of the output key map of our LGMA module and the
key map of It . After that, we multiple the affinity matrix
with the output value map of our LGMA module, and then
concatenate the multiplication result with the value map of
It to produce the output features of the MR module.
Decoder. As shown in Figure 4, our network employs two
memory read (MR) modules to read the corresponding attentive memory features to enhance features at the 3rd CNN
layer and the 4-th CNN layer. After that, the decoder of our
network takes the output features of two MR modules to
predict the instance-level lane detection result of the target
video frame It . To do so, we first compress the output features of two MR modules to have 256 channels by a convolutional layer and a residual block. Then, three refinement
blocks (see [32] for the details of the refinement block) are
employed to gradually fuse two compressed feature maps
and these two encoder features at the first two CNN layer,
and each refinement block upscales the spatial resolution by
a factor of two. Finally, we follow [32] to produce the video
instance-level lane detection result from the output features
of the last refinement block.
Our training procedure. Like [32], we first train the feature extraction backbone (i.e., encoder of Figure 4) of our
network to extract features for each video frame. Specifically, we take the past two frames (only from the input
video) of the current video frame (query frame) to construct
a local memory, and then employ a memory read (MR)
module to read the local memory feature for producing a
instance-level lane detection result of the query frame. After
that, we take five past frames from the input video and five
past frames of a shuffled video of the current video frame
(query frame), and the encoder trained in the first training
stage to obtain their feature maps, and then follow the network pipeline of Figure 4 to predict an instance-level lane
detection result of the target video frame to train our network. In these two training stages, we empirically add a
cross entropy loss and a IoU loss to compute the loss of
the predicted instance-level lane map and the corresponding ground truth for training.
Training parameters. We implement our MMA-Net using
Pytorch and train our network on a NVIDIA GTX 2080Ti.
In the first training stage, we initialize the feature extraction
backbone by using pre-trained ResNet-50 [12], and employ
Adam optimizer with a learning rate of 10−5 , a momentum
value of 0.9, and a weight decay of 5 × 10−4 . In the second
training stage, stochastic gradient descent optimizer is employed to optimize the whole network with the learning rate
as 10−3 , a momentum value of 0.9, a weight decay of 10−6 ,
and a mini-batch size of 1. The first training stage takes
about 14 hours with 100 epochs while the second training
stages takes about 7 hours with 50 epochs.
5. Experiments
Dataset. Currently, there is no benchmark dataset dedicated for training video instance lane detection by annotating instance-level lanes of all frames in videos. With our
VIL-100, we test the video instance lane detection performance of our network and compared methods.
Evaluation metrics. To quantitatively compare different
methods, we first employ six widely-used image-level metrics, including three region-based metrics and three linebased metrics. Three region-based metrics [33, 6] are
mIoU, F1(IoU>0.5) (denoted as F10.5 ), and F1(IoU>0.8)
(denoted as F10.8 ), while three line-based metrics are Accuracy, FP, and FN. Apart from image-level metrics [43],
we also introduce video-level metrics to consider the temporal stability of the segmentation results for further quantitatively comparing different methods. Video-level metrics
are MJ , OJ , MF , OF , and MT ; please refer to [35] for
definitions of these video-level metrics. In general, a better video instance lane detection method shall have larger
mIoU, F10.5 , F10.8 , and accuracy scores, as well as smaller
FP and FN scores. According to [35], a better video instance segmentation method has larger scores for all videobased metrics.
Comparative methods. To evaluate the effectiveness of
the developed video instance lane detection method, we
compare it against 10 state-of-the-art methods, including
LaneNet [30], SCNN [33], ENet-SAD [14], UFSA [37],
LSTR [25], GAM [18], RVOS [44], STM [32], AFBURR [24] and TVOS [50]. Among them, LaneNet, SCNN,
ENet-SAD, UFSA, and LSTR are image-level lane detection methods, while GAM, RVOS, STM, AFB-URR and
TVOS are instance-level video object detection. Since our
work focuses on video instance lane detection, we do not
include video binary segmentation methods (e.g., video
salient object detection, video shadow detection) for comparisons. For all comparing methods, we use their public
implementations, and re-train these methods on our VIL100 dataset for a fair comparison.
5.1. Comparisons with State-of-the-art Methods
Quantitative comparisons. Table 2 reports six image-level
quantitative results of our network and all compared methods. Basically, we can observe that lane detection methods have a better performance on line-based metrics, since
they often utilize line-related information (e.g., shape and
direction) to infer the lines. By contrast, the VOS methods formulate the lane detection task as a region-based segmentation with abjectness constraint and thus perform better on region-based metrics. Specifically, LaneNet has the
best mIoU score of 0.633, STM has the best F10.5 of 0.756,
Table 2: Quantitative comparisons of our network and state-of-the-art methods in terms of image-based metrics.
Region
Line
Methods
Year
mIoU↑ F10.5 ↑ F10.8 ↑ Accuracy ↑ FP ↓ FN ↓
LaneNet [30]
2018
0.633
0.721
0.222
0.858
0.122 0.207
SCNN [33]
2018
0.517
0.491
0.134
0.907
0.128 0.110
2019
0.616
0.755
0.205
0.886
0.170 0.152
ENet-SAD [14]
UFSA [37]
2020
0.465
0.310
0.068
0.852
0.115 0.215
2021
0.573
0.703
0.131
0.884
0.163 0.148
LSTR [25]
GAM [18]
2019
0.602
0.703
0.316
0.855
0.241 0.212
2019
0.294
0.519
0.182
0.909
0.610 0.119
RVOS [44]
STM [32]
2019
0.597
0.756
0.327
0.902
0.228 0.129
2020
0.515
0.600
0.127
0.846
0.255 0.222
AFB-URR [24]
TVOS [50]
2020
0.157
0.240
0.037
0.461
0.582 0.621
MMA-Net (Ours) 2021
0.705
0.839
0.458
0.910
0.111 0.105
(a) Input frames
(b) Ground truths
(c) Our method
(d) STM
(e) GAM
(f) LaneNet
(g) ENet-SAD
(h) UFSA
(i) LSTR
Figure 6: Visual comparison of video instance lane detection maps produced by our network (3rd column) and state-of-the-art
methods (4-th to 9-th columns) against ground truths (2nd column). Please refer to supp. material for more comparisons.
Table 3: Quantitative comparisons of our network and stateof-the-art methods in terms of video-based metrics.
Methods
GAM [18]
RVOS [44]
STM [32]
AFB-URR [24]
TVOS [50]
MMA-Net
(Ours)
MJ ↑
0.414
0.251
0.656
0.308
0.255
OJ ↑
0.203
0.251
0.626
0.251
0.251
MF ↑
0.721
0.251
0.743
0.415
0.257
OF ↑
0.781
0.251
0.763
0.435
0.256
MT ↑
0.568
0.251
0.656
0.362
0.255
0.679
0.735
0.848
0.873
0.764
and the best F10.8 of 0.327. Regarding Accuracy, FP, and
FN, RVOS has the best Accuracy of 0.909; UFSA has the
best FP of 0.115; and SCNN has the best FN of 0.110; see
Table 2. Compared to these best scores of different metrics,
our method has a mIoU improvement of 11.37%, a F10.5
improvement of 10.98%, a F10.8 improvement of 40.06%,
a Accuracy improvement of 0.11%, a FP improvement of
3.48%, and a FN improvement of 4.55%.
Moreover, Table 3 summaries video-based metric scores
of our network and compared methods. Among results of
compared video-based methods, we can find that GAM has
the largest OF score (i.e., 0.781), while STM has the best
performance of other four video-based metrics. These corresponding best four values of STM are MJ of 0.656, OJ
of 0.626, MF of 0.743, and MT of 0.656. More importantly, our method achieves a further improvement for all
five video-based metrics, showing that our method can more
accurately segment lanes of different videos. To be specific,
our method improves MJ from 0.656 to 0.679; OJ from
0.626 to 0.735; MF from 0.743 to 0.848; OF from 0.781
to 0.873; and MT from 0.656 to 0.764.
Visual comparisons. Figure 6 visually compares video instance lane detection maps produced by our network and
compared methods. Apparently, compared methods neglect some lane regions or wrongly recognized parts of
road regions as target lane regions, as shown in 4-th to 9th columns of Figure 6. Moreover, instance labels of different lanes are also mistakenly detected in video instance
Table 4: Quantitative results of our network with different
sampling numbers.
3 frames
5 frames (ours)
7 frames
mIoU ↑
0.678
0.715
0.705
F10.5 ↑
0.816
0.838
0.839
Accuracy ↑
0.904
0.907
0.910
FP ↓
0.125
0.106
0.111
FN ↓
0.116
0.111
0.105
Table 5: Quantitative results of our network and constructed
baseline networks of ablation study in terms of image-level
and video-level metrics.
Measure
Basic +LM +GM +LGM Ours
mIoU ↑
0.638 0.688 0.670
0.693
0.705
F10.5 ↑
0.758 0.790 0.796
0.822
0.839
F10.8 ↑
0.402 0.425 0.423
0.450
0.458
Accuracy ↑ 0.857 0.862 0.887
0.897
0.910
FP ↓
0.195 0.128 0.150
0.122
0.111
0.173 0.163 0.136
0.124
0.105
FN ↓
MT ↑
0.708 0.706 0.721
0.760
0.764
MJ ↑
0.627 0.632 0.640
0.678
0.679
OJ ↑
0.664 0.676 0.679
0.729
0.735
MF ↑
0.789 0.781 0.802
0.842
0.848
OF ↑
0.811 0.795 0.826
0.865
0.873
lane detection results of compared methods. On the contrary, our method can more accurately detect lane regions
and has correct instance labels for all lanes, and our results
are more consistent with the ground truths of Figure 6 (b).
In addition, for these challenging cases (i.e, traffic scenes
at night or haze weather conditions) at the last two rows,
our method also predicts more accurate lane detection maps
than competitors, showing the robustness and effectiveness
of our video instance lane detection method.
Sampling number. Existing VOS methods usually sampled 3/5/7 (less than 10) neighboring frames as the input
due to the limitation of GPU memory, while memory-based
methods (e.g., [30]) required 20 frames in the memory to
process a video with 100 frames. Moreover, we also provide an experiment of our network with 3/5/7 frames in
the Table 4, where our method with 5 frames outperforms
that with 3 frames significantly, and is comparable with the
one employing 7 frames. By balancing the GPU memory
and computation consuming, we empirically use 5 frames
in our method.
5.2. Ablation Study
Basic network design. Here, we construct four baseline
networks. The first one (denoted as “Basic”) is to remove
the attention mechanism from the local memory, the whole
global memory, and the multi-level aggregation mechanism
from our network. It means that “Basic” is equal to the
original STM but removes the mask initialization of the
first video frame. The second one (“+LM”) is to add the
attention mechanism to the local memory of “Basic” to
weighted average local memory features, while the third
one (“+GM”) is to add the attentive global memory to “Basic”. The last baseline network (“+LGM”) is to fuse the
global memory and the local memory together into “Basic”.
It means that we remove the multi-level integration mechanism from our network to construct “LGM”. Table 5 reports
image-based and video-based metric results of our method
and compared baseline networks.
Effectiveness of the attention mechanism in memory.
As shown in Table 5, “+LM” outperforms “Basic” on all
image-level and video-level metrics. It indicates that leveraging the attention mechanism to assign different weights
for all memory features, which enables the local memory to
extract more discriminative memory features for the query
feature refinement, thereby resulting in a superior improving video instance lane detection performance.
Effectiveness of the global memory. “GM” has a better
performance of image-based metrics and video-based metrics than “Basic”, demonstrating that the global memory has
a contribution to the superior performance of our method.
Moreover, “LGM” has superior metrics on all metrics over
“LM” and “GM”. It shows that aggregating the local memory and the global memory can further enhance the query
features of the target video frame and thus incurs a superior
video instance lane detection performance.
Effectiveness of our multi-level mechanism. As shown
in the last two columns of Table 5, our method has larger
mIoU, F10.5 , F10.8 , and Accuracy, smaller FP and FN
scores, as well as larger video-based metric (MJ , OJ ,
MF , OF , and MT ) scores than “+LGM”. It indicates that
applying our LGMA modules on low-level and high-level
features of the target video frame enable our network to better detect video instance lanes.
6. Conclusion
To facilitate the research on video instance lane detection, we collected a new VIL-100 video dataset with highquality instance-level lane annotations over all the frames.
VIL-100 consists of 100 videos with 10, 000 frames covering various line-types and traffic scenes. Meanwhile, we developed a video instance lane detection network MMA-Net
by aggregating local attentive memory information of the
input video and global attentive memory information of a
shuffled video as a new baseline on VIL-100. Experimental
results demonstrated that MMA-Net outperforms state-ofthe-art methods by a large margin. We agree that more diverse scenes/viewpoints could enhance the dataset, and we
definitely continue to collect more data in our future work.
Acknowledgments
The work is supported by the National Natural Science
Foundation of China (Project No. 62072334, 61902275,
61672376, U1803264).
References
[1] UN
Regulation
No.
157.
https://globalautoregs.com/rules/247-automated-lanekeeping-systems-alks, 2021.
[2] Mohamed Aly. Real time detection of lane markers in urban
streets. In IVS, pages 7–12, 2008.
[3] Massimo Bertozzi and Alberto Broggi. Gold: A parallel realtime stereo vision system for generic obstacle and lane detection. IEEE Transactions on Image Processing, 7(1):62–81,
1998.
[4] Xi Chen, Zuoxin Li, Ye Yuan, Gang Yu, Jianxin Shen, and
Donglian Qi. State-aware tracker for real-time video object
segmentation. In CVPR, pages 9384–9393, 2020.
[5] Yihong Chen, Yue Cao, Han Hu, and Liwei Wang. Memory enhanced global-local aggregation for video object detection. In CVPR, pages 10337–10346, 2020.
[6] Zhihao Chen, Liang Wan, Lei Zhu, Jia Shen, Huazhu Fu,
Wennan Liu, and Jing Qin. Triple-cooperative video shadow
detection. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages 2715–
2724, 2021.
[7] Jingchun Cheng, Yi-Hsuan Tsai, Shengjin Wang, and MingHsuan Yang. Segflow: Joint learning for video object segmentation and optical flow. In ICCV, pages 686–695, 2017.
[8] Alon Faktor and Michal Irani. Video segmentation by nonlocal consensus voting. In BMVC, 2014.
[9] Chao Fan, Lilong Hou, Shuai Di, and Jingbo Xu. Research
on the lane detection algorithm based on zoning hough transformation. In Advanced Materials Research, pages 1862–
1866, 2012.
[10] Mohsen Ghafoorian, Cedric Nugteren, Nóra Baka, Olaf
Booij, and Michael Hofmann. El-gan: Embedding loss
driven generative adversarial networks for lane detection. In
ECCV Workshops, pages 0–0, 2018.
[11] Matthias Grundmann, Vivek Kwatra, Mei Han, and Irfan
Essa. Efficient hierarchical graph-based video segmentation.
In CVPR, pages 2141–2148, 2010.
[12] Kaiming He, Xiangyu Zhang, Shaoqing Ren, and Jian Sun.
Deep residual learning for image recognition. In CVPR,
pages 770–778, 2016.
[13] Yuenan Hou, Zheng Ma, Chunxiao Liu, Tak-Wai Hui, and
Chen Change Loy. Inter-region affinity distillation for road
marking segmentation. In CVPR, pages 12483–12492, 2020.
[14] Yuenan Hou, Zheng Ma, Chunxiao Liu, and Chen Change
Loy. Learning lightweight lane detection cnns by self attention distillation. In ICCV, pages 1013–1021, 2019.
[15] Xinyu Huang, Peng Wang, Xinjing Cheng, Dingfu Zhou,
Qichuan Geng, and Ruigang Yang. The apolloscape open
dataset for autonomous driving and its application. IEEE
Transactions on Pattern Analysis and Machine Intelligence,
42(10):2702–2719, 2019.
[16] Brody Huval, Tao Wang, Sameep Tandon, Jeff Kiske, Will
Song, Joel Pazhayampallil, Mykhaylo Andriluka, Pranav Rajpurkar, Toki Migimatsu, Royce Cheng-Yue, et al. An empirical evaluation of deep learning on highway driving. arXiv
preprint arXiv:1504.01716, 2015.
[17] Suyog Dutt Jain, Bo Xiong, and Kristen Grauman. Fusionseg: Learning to combine motion and appearance for fully
automatic segmentation of generic objects in videos. In
CVPR, pages 2117–2126, 2017.
[18] Joakim Johnander, Martin Danelljan, Emil Brissman, Fahad Shahbaz Khan, and Michael Felsberg. A generative appearance model for end-to-end video object segmentation. In
CVPR, pages 8953–8962, 2019.
[19] Margret Keuper, Bjoern Andres, and Thomas Brox. Motion trajectory segmentation via minimum cost multicuts. In
ICCV, pages 3271–3279, 2015.
[20] Seokju Lee, Junsik Kim, Jae Shin Yoon, Seunghak Shin,
Oleksandr Bailo, Namil Kim, Tae-Hee Lee, Hyun Seok
Hong, Seung-Hoon Han, and In So Kweon. Vpgnet: Vanishing point guided network for lane and road marking detection
and recognition. In ICCV, pages 1947–1955, 2017.
[21] Yong Jae Lee, Jaechul Kim, and Kristen Grauman. Keysegments for video object segmentation. In ICCV, pages
1995–2002, 2011.
[22] Yadi Li, Liguo Chen, Haibo Huang, Xiangpeng Li, Wenkui
Xu, Liang Zheng, and Jiaqi Huang. Nighttime lane markings
recognition based on canny detection and hough transform.
In RCAR, pages 411–415, 2016.
[23] Zuoquan Li, Huimin Ma, and Zhengyu Liu. Road lane detection with gabor filters. In ISAI, pages 436–440, 2016.
[24] Yongqing Liang, Xin Li, Navid Jafari, and Qin Chen.
Video object segmentation with adaptive feature bank and
uncertain-region refinement. In NeurIPS, 2020.
[25] Ruijin Liu, Zejian Yuan, Tie Liu, and Zhiliang Xiong. Endto-end lane shape prediction with transformers. In WACV,
pages 3694–3702, 2021.
[26] Xinkai Lu, Wenguan Wang, Martin Danelljan, Tianfei Zhou,
Jianbing Shen, and Luc Van Gool. Video object segmentation with episodic graph memory networks. In ECCV, pages
661–679. Springer, 2020.
[27] Nicolás Madrid and Petr Hurtik. Lane departure warning for
mobile devices based on a fuzzy representation of images.
Fuzzy Sets and Systems, 291(10):144–159, 2016.
[28] J. C. McCall and M. M. Trivedi. Video-based lane estimation and tracking for driver assistance: survey, system, and
evaluation. IEEE Transactions on Intelligent Transportation
Systems, 7(1):20–37, 2006.
[29] Nicolas Märki, Federico Perazzi, Oliver Wang, and Alexander Sorkine-Hornung. Bilateral space video segmentation.
In CVPR, pages 743–751, 2016.
[30] Davy Neven, Bert De Brabandere, Stamatios Georgoulis,
Marc Proesmans, and Luc Van Gool. Towards end-to-end
lane detection: an instance segmentation approach. In IVS,
pages 286–291, 2018.
[31] Peter Ochs and Thomas Brox. Object segmentation in video:
a hierarchical variational approach for turning point trajectories into dense regions. In ICCV, pages 1583–1590, 2011.
[32] Seoung Wug Oh, Joon-Young Lee, Ning Xu, and Seon Joo
Kim. Video object segmentation using space-time memory
networks. In ICCV, pages 9226–9235, 2019.
[33] Xingang Pan, Jianping Shi, Ping Luo, Xiaogang Wang, and
Xiaoou Tang. Spatial as deep: Spatial cnn for traffic scene
understanding. In AAAI, pages 7276–7283, 2018.
[34] Bo Pang, Kaiwen Zha, Hanwen Cao, Chen Shi, and Cewu
Lu. Deep rnn framework for visual sequential applications.
In CVPR, pages 423–432, 2019.
[35] Federico Perazzi, Jordi Pont-Tuset, Brian McWilliams, Luc
Van Gool, Markus Gross, and Alexander Sorkine-Hornung.
A benchmark dataset and evaluation methodology for video
object segmentation. In CVPR, pages 724–732, 2016.
[36] Federico Perazzi, Oliver Wang, Markus Gross, and Alexander Sorkine-Hornung. Fully connected object proposals for
video segmentation. In ICCV, pages 3227–3234, 2015.
[37] Zequn Qin, Huanyu Wang, and Xi Li. Ultra fast structureaware deep lane detection. In ECCV, pages 276–291.
Springer, 2020.
[38] Andreas Robinson, Felix Jaremo Lawin, Martin Danelljan,
Fahad Shahbaz Khan, and Michael Felsberg. Learning fast
and robust target models for video object segmentation. In
CVPR, pages 7406–7415, 2020.
[39] David E. Rumelhart, Geoffrey E. Hinton, and Ronald J.
Williams.
Learning internal representations by backpropagating errors. Nature, 99(6088):533–536, 1986.
[40] Hongje Seong, Junhyuk Hyun, and Euntai Kim. Kernelized
memory network for video object segmentation. In ECCV,
pages 629–645. Springer, 2020.
[41] Tsungying Sun, Shangjeng Tsai, and Vincent Chan. Hsi
color model based lane-marking detection. In 2006 IEEE
Intelligent Transportation Systems Conference, pages 1168–
1172, 2006.
[42] Jigang Tang, Songbin Li, and Peng Liu. A review of lane
detection methods based on deep learning. Pattern Recognition, 111:107623, 2021.
[43] TuSimple. http://benchmark.tusimple.ai, 2017.
[44] Carles Ventura, Miriam Bellver, Andreu Girbau, Amaia Salvador, Ferran Marques, and Xavier Giro i Nieto. RVOS: Endto-end recurrent network for video object segmentation. In
CVPR, pages 5277–5286, 2019.
[45] Jun Wang, Tao Mei, Bin Kong, and Hu Wei. An approach
of lane detection based on inverse perspective mapping. In
ITSC, pages 35–38, 2014.
[46] Wenguan Wang, Jianbing Shen, Fatih Porikli, and Ruigang
Yang. Semi-supervised video object segmentation with
super-trajectories. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 41(4):985–998, 2018.
[47] Wenguan Wang, Jianbing Shen, Ruigang Yang, and Fatih
Porikli. Saliency-aware video object segmentation. IEEE
Transactions on Pattern Analysis and Machine Intelligence,
40(1):20–33, 2017.
[48] Ruizheng Wu, Huaijia Lin, Xiaojuan Qi, and Jiaya Jia. Memory selection network for video propagation. In ECCV, pages
175–190. Springer, 2020.
[49] Fisher Yu, Haofeng Chen, Xin Wang, Wenqi Xian, Yingying
Chen, Fangchen Liu, Vashisht Madhavan, and Trevor Darrell. Bdd100k: A diverse driving dataset for heterogeneous
multitask learning. In CVPR, pages 2633–2642, 2020.
[50] Yizhuo Zhang, Zhirong Wu, Houwen Peng, and Stephen Lin.
A transductive approach for video object segmentation. In
CVPR, pages 6949–6958, 2020.