VECTOR ANALYSIS
5.1 Vector differential calculus
5.1.1 Scalar and vector fields, limits, continuity and differentiability
A scalar function F(x, y, z) defined over some region space D is a function that assigns to each
point P0 in D with coordinates, (x0, y0, z0) the number F(P0) = F(x0, y0, z0).
The set of all numbers F(P) for all points P in D are said to form a scalar field over D.
If P has a vector r, we can write the scalar field F(x, y, z) in the form F(P) = F(r) and in physical
problems P is usually a point in space and in addition to depending on P the function F often
depends on the time, t hence F(P, t) = F(x, y, z, t) and in this case we can write, F(P,t) = F(r,t).
Scalar and vector fields
A vector field is defined by a vector function, F(x, y, z) over some space D that assigns to each
point P0 in D with coordinates (x0, y0, z0) the vector F(P0) = F(x0, y0, z0). Such functions are called
vector functions or vector – valued functions.
In general the terms of the unit vectors, i, j, and k, a time – dependent vector – valued function can
be defined by setting;
𝑭(𝒓, 𝑡) = 𝑓1 (𝒓, 𝑡)𝒊 + 𝑓2 (𝒓, 𝑡)𝒋 + 𝑓3 (𝒓, 𝑡)𝒌, where the scalars f1(r,t), f2(r,t), and f3(r,t) are
components of F(r,t) that depends on both position and time.
Example
(a) The scalar function of position F(x, y, z) = xyz2 for (x, y, z) inside the unit sphere x2+y2+z2=1
defines a scalar field throughout the sphere.
(b) The vector valued function F(x,y,z) = (x – y)i + (y - z)j + (xyz – 2)k for (x, y, z) inside the
𝑥2
𝑦2
𝑧2
ellipsoid 𝑎2 + 𝑏2 + 𝑐 2 = 1, defines a vector throughout the ellipsoid.
Single real variable vector function
A single real variable vector function, F(t), is the one that can be written as;
𝑭(𝑡) = 𝑓1 (𝑡)𝒊 + 𝑓2 (𝑡)𝒋 + 𝑓3 (𝑡)𝒌 where f1(t), f2(t), and f3(t) are functions of t.
Such functions are called vector functions of single real variable over some interval 𝑎 ≤ 𝑡 ≤ 𝑏.
Limits and continuity of vector functions of a single variable
A vector function of a single real variable, 𝑭(𝑡) = 𝑓1 (𝑡)𝒊 + 𝑓2 (𝑡)𝒋 + 𝑓3 (𝑡)𝒌 is said to have L as
its limit at t = t0 written as;
lim 𝑭(𝑡) = 𝐿
𝑡→𝑡0
Where; 𝐿 = 𝐿1 𝒊 + 𝐿2 𝒋 + 𝐿3 𝒋, if;
lim 𝑓1 (𝑡) = 𝐿1 , lim 𝑓2 (𝑡) = 𝐿2 , 𝑎𝑛𝑑 lim 𝑓3 (𝑡) = 𝐿3
𝑡→𝑡0
𝑡→𝑡0
𝑡→𝑡0
Continuity
If the vector function is defined at t = t0 and lim F(t ) = F(t0 ) , then the function F(t) is said to be
t →t 0
continuous. A vector function that is continuous over the interval 𝑎 ≤ 𝑡 ≤ 𝑏 is continuous at each
t in the interval.
A vector function of a single real variable that is not continuous at a point t0 is said to be
discontinuous at t0.
Differentiability
If t is increased to 𝑡 + ∆𝑡, the change ∆𝑭 produced in F is;
∆𝑭 = 𝑭(𝑡 + ∆𝑡) − 𝑭(𝑡)
∴ ∆𝑭 = {𝑓1 (𝑡 + ∆𝑡)𝒊 + 𝑓2 (𝑡 + ∆𝑡)𝒋 + 𝑓3 (𝑡 + ∆𝑡)𝒌} − {𝑓1 (𝑡)𝒊 + 𝑓2 (𝑡)𝒋 + 𝑓3 (𝑡)𝒌}
Therefore,
∆𝑭
𝑓1 (𝑡 + ∆𝑡) − 𝑓1 (𝑡)
𝑓2 (𝑡 + ∆𝑡) − 𝑓2 (𝑡)
𝑓3 (𝑡 + ∆𝑡) − 𝑓3 (𝑡)
=(
)𝒊 +(
)𝒋 + (
)𝒌
∆𝑡
∆𝑡
∆𝑡
∆𝑡
If the functions f1(t), f2(t) and f3(t) are differentiable by letting ∆𝑡 → 0, then;
𝑑𝑭 𝑑𝑓1
𝑑𝑓2
𝑑𝑓3
=
𝒊+
𝒋+
𝒌 … … … … … … … … … … … … … … … … … … … … … … … … … … … . . (1)
𝑑𝑡
𝑑𝑡
𝑑𝑡
𝑑𝑡
Therefore, the vector function F(t) of a single variable is differentiable at point t0 if its components
are differentiable at the point and hence its derivative is given by the equation (1).
The second order derivative of F(t) is then given by;
𝑑2 𝑭
𝑑𝑡 2
𝑑
𝑑𝑭
= 𝑑𝑡 ( 𝑑𝑡 )
And in general;
𝑑𝑛 𝑭
𝑑𝑡 𝑛
𝑑
𝑑𝑛−1 𝑭
= 𝑑𝑡 ( 𝑑𝑡 𝑛−1 ) for 𝑛 ≥ 2
5.1.2 Differentiation rules of vector functions of single real variable
Let u(t) and v(t) be differentiable functions of t over some interval 𝑎 ≤ 𝑡 ≤ 𝑏 with C being an
arbitrary vector constant and K an arbitrary scalar constant, then;
1.
2.
3.
4.
𝑑𝑪
𝒅𝒕
𝑑
𝑑𝑡
𝑑
𝑑𝑡
𝑑
𝑑𝑡
𝑑
=0
(𝐾𝒖) = 𝐾
(𝒖 ± 𝒗) =
(𝒖. 𝒗) = 𝒗
𝑑𝒖
𝒅𝒕
𝑑𝒖
𝒅𝒕
𝑑𝒖
𝑑𝒗
± 𝑑𝑡
𝑑𝒖
+ 𝒖 𝑑𝑡
𝒅𝒕
𝑑𝒖
𝒅𝒗
5. 𝑑𝑡 (𝒖 × 𝒗) = 𝒅𝒕 × 𝒗 + 𝒖 × 𝑑𝑡
6. If u(t) is a differentiable function of t and 𝑡 = 𝑡(𝑠) a differentiable function of s, then;
𝑑𝒖 𝑑𝒖 𝑑𝑡
=
.
𝑑𝑠
𝑑𝑡 𝑑𝑠
Or explicitly; if 𝒖(𝑡) = 𝑢𝟏 (𝑡)𝒊 + 𝑢𝟐 (𝑡)𝒋 + 𝑢3 (𝑡)𝒌, then;
𝑑𝒖 𝑑𝑢1 𝑑𝑡
𝑑𝑢2 𝑑𝑡
𝑑𝑢3 𝑑𝑡
=
. 𝒊+
. 𝒋+
. 𝒌
𝑑𝑠
𝑑𝑡 𝑑𝑠
𝑑𝑡 𝑑𝑠
𝑑𝑡 𝑑𝑠
Example 5.1
Find the first three derivatives of r with respect to t, given that;
𝒓(𝑡) = 𝑐𝑜𝑠𝑡𝒊 + 𝑠𝑖𝑛ℎ𝑡𝒋 + 𝑡 2 𝒌
Solution
𝑑𝒓
= −𝑠𝑖𝑛𝑡𝒊 + 𝑐𝑜𝑠ℎ𝑡𝒋 + 2𝑡𝒌
𝑑𝑡
𝑑𝟐 𝒓
= −𝑐𝑜𝑠𝑡𝒊 + 𝑠𝑖𝑛ℎ𝑡𝒋 + 2𝒌
𝑑𝑡 2
𝑑3𝒓
= 𝑠𝑖𝑛𝑡𝒊 + 𝑐𝑜𝑠ℎ𝑡𝒋
𝑑𝑡 3
Example 5.2
𝑑
Given that 𝒖 = 𝑡𝒊 − 2𝑡𝒋 + 𝑡 2 𝒌, 𝒗 = 𝑡𝒊 + 3𝑡𝒌 and 𝒘 = 𝑡𝒊 − 𝑡 2 𝒌, find 𝑑𝑡 [(𝒖. 𝒗)𝒘]
Solution
𝒖. 𝒗 = −2𝑡 2 + 3𝑡 3
(𝒖. 𝒗) = (3𝑡 4 − 2𝑡 3 )𝒊 − (3𝑡 5 − 2𝑡 4 )𝒌
𝑑
[(𝒖𝒗)𝒘] = (12𝑡 3 − 6𝑡 2 )𝒊 − (15𝑡 4 − 8𝑡 3 )𝒌
𝑑𝑡
Vector differential
∴
By analogy with real variable calculus, if 𝑭(𝑡) = 𝑓1 (𝑡)𝒊 + 𝑓2 (𝑡)𝒋 + 𝑓3 (𝑡)𝒌, the vector differential
dF is defined as;
𝑑𝑭 = (
𝑑𝑓1
𝑑𝑓2
𝑑𝑓2
𝒊+
𝒋+
𝒌) 𝑑𝑡
𝒅𝒕
𝑑𝑡
𝑑𝑡
5.1.3 Application of vector differential to arc length
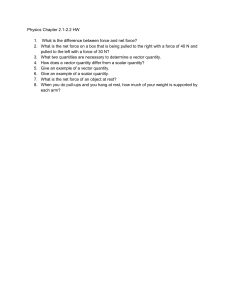
Considering Figure 5.1; The concept of vector differential can be applied to the element of arc
length along a space curve, Γ defined by the position vector 𝒓(𝑡) = 𝑥1 (𝑡)𝒊 + 𝑥2 (𝑡)𝒋 + 𝑥3 (𝑡)𝒌 for
𝑡 ≥ 𝑡0 .
If s is the arc length measured along, Γ, from some fixed point,
𝑑𝑥
𝑑𝑥
𝑑𝑥
𝑑𝑥1 = 𝑑𝑡1 𝑑𝑡, 𝑑𝑥2 = 𝑑𝑡2 𝑑𝑡 and 𝑑𝑥3 = 𝑑𝑡3 𝑑𝑡.
Applying pythogoras theorem, gives;
1/2
𝑑𝑥1 2
𝑑𝑥2 2
𝑑𝑥3 2
𝑑𝑠 = [(
) +(
) +(
) ]
𝑑𝑡
𝑑𝑡
𝑑𝑡
𝑑𝑡
Figure5.1 The geometrical relationship between the differentials ds, dx1, dx2, and dx3
Hence,
1/2
𝑑𝑠
𝑑𝑟
𝑑𝑥1 2
𝑑𝑥2 2
𝑑𝑥3 2
= | | = [(
) +(
) +(
) ]
𝑑𝑡
𝑑𝑡
𝑑𝑡
𝑑𝑡
𝑑𝑡
𝑑𝑠
𝑑𝒓
This shows that if t is time and r(t) is position vector in the space, then, 𝑑𝑡 = |𝑑𝑡 | is the speed with
which the tip of position vector r(t) traces out a space curve, Γ.
Example 5.3
If r(t) is position vector and t is the time, find the velocity, speed and acceleration of a particle
with position vector; 𝒓(𝑡) = 𝑎𝑐𝑜𝑠𝜔𝑡 + 𝑎𝑠𝑖𝑛𝜔𝑡, where a and ω are constants.
Solution
We have |𝒓(𝑡)| = |𝑎2 𝑐𝑜𝑠 2 𝜔𝑡 + 𝑎2 𝑠𝑖𝑛2 𝜔𝑡| = 𝑎, hence the particle s describing a circle of radius
a and centre at the origin of the x - y plane.
𝑑𝒓
𝑑𝑡
𝑑𝒓
= −𝜔𝑎𝑠𝑖𝑛𝜔𝑡𝒊 + 𝜔𝑎𝑐𝑜𝑠𝜔𝑡𝒋 ; 𝑠𝑝𝑒𝑒𝑑 = |𝑑𝑡 | = 𝜔𝑎
𝑑2 𝒓
= −𝜔2 𝑎𝑐𝑜𝑠𝜔𝑡𝒊 − 𝜔2 𝑎𝑠𝑖𝑛𝜔𝑡𝒋 = −𝜔2 𝑟. Hence the acceleration is proportional to the position
r but oppositely directed hence acting towards the centre.
𝑑𝑡 2
Exercise 5.1
1. Find the first and second derivatives of the following and their values at the given value of t
𝜋
(a) 𝒓(𝑡) = 𝑡𝑠𝑖𝑛𝑡𝒊 + 𝑡𝑐𝑜𝑠𝑡𝒋 + 𝑡 2 𝒌, 𝑡 = 2
(b) 𝒓(𝑡) = ln(1 + 𝑡) 𝒊 + ln(1 + 𝑡 2 ) 𝒋 + 𝑒 3𝑡 𝒌, t = 0
𝑑𝒓
2. Given 𝒓(𝑡) = 𝑡𝒊 + 3𝑡 2 𝒋 − (𝑡 − 1)𝒌, and 𝑡 = ln(1 + 𝑠 2 ), find 𝑑𝑠.
3. A particle has a position vector at time t given by; 𝒓 = 𝑡 2 𝒊 + 4𝑐𝑜𝑠2𝑡𝒋 + 3𝑠𝑖𝑛2𝑡𝒌. Find the
component of its velocity in the direction 2𝒊 + 𝒋 + 2𝒌 at time t.
5.2 Integrating of scalar and vector functions of a single variable
If F(t) is any antiderivative of f(t), then an indefinite integral of the function f with respect to t is
given by;
∫ 𝒇(𝑡)𝑑𝑡 = 𝑭(𝑡) + 𝐶 where C is an arbitrary vector constant.
If 𝒇(𝑡) = 𝑓1 (𝑡)𝒊 + 𝑓2 (𝑡)𝒋 + 𝑓3 (𝑡)𝒌, then;
∫ 𝒇(𝑡)𝑑𝑡 = ∫ 𝑓1 (𝑡)𝑑𝑡 𝒊 + ∫ 𝑓2 (𝑡)𝑑𝑡 𝒋 + ∫ 𝑓3 (𝑡)𝑑𝑡 𝒌 = 𝑭(𝑡) + 𝐶
The definite integral of f(t) over the interval 𝑎 ≤ 𝑡 ≤ 𝑏 is defined by;
𝑏
𝑏
𝑏
𝑏
∫ 𝒇(𝑡)𝑑𝑡 = ∫ 𝑓1 (𝑡)𝑑𝑡 𝒊 + ∫ 𝑓2 (𝑡)𝑑𝑡 𝒋 + ∫ 𝑓3 (𝑡)𝑑𝑡 𝒌
𝑎
𝑎
𝑎
𝑎
Example 5.4
Given that 𝒇(𝑡) = 𝑠𝑖𝑛𝑡𝒊 + (1 − 𝑡 3 )𝒋 + 𝑒 −2𝑡 𝒌,find;
1
(a) ∫ 𝒇(𝑡)𝑑𝑡
(b) ∫0 𝒇(𝑡)𝑑𝑡
Solution
∫ 𝒇(𝑡)𝑑𝑡 = ∫ 𝑠𝑖𝑛𝑡 𝑑𝑡𝒊 + ∫(1 − 𝑡 3 )𝑑𝑡 𝒋 + ∫ 𝑒 −2𝑡 𝒌
𝑡4
1
= −𝑐𝑜𝑠𝑡𝒊 + (𝑡 − 4 ) 𝒋 − 2 𝑒 −2𝑡 𝒌 + 𝑐1 𝒊 + 𝑐2 𝒋 + 𝑐3 𝒌
Which can be written as;
−𝑐𝑜𝑠𝑡𝒊 + (𝑡 −
𝑡4
1
) 𝒋 − 𝑒 −2𝑡 𝒌 + 𝑪
4
2
Where C is an arbitrary vector constant.
1
1
1
1
(b) ∫0 𝒇(𝑡)𝑑𝑡 = ∫0 𝑠𝑖𝑛𝑡 𝒊 + ∫0 (1 − 𝑡 3 ) 𝑑𝑡𝒋 + ∫0 𝑒 −2𝑡 𝑑𝑡 𝒌
3
1 1
= (1 − 𝑐𝑜𝑠1)𝒊 + 𝒊 + ( − 𝑒 −2 ) 𝒌
4
2 2
5.2.1 Length of an arc on a curve defined by a vector function of a single variable
From,
𝑑𝑠
𝑑𝑥
2
𝑑𝑥
2
𝑑𝑥
2 1/2
= [( 𝑑𝑡1 ) + ( 𝑑𝑡2 ) + ( 𝑑𝑡3 ) ]
𝑑𝑡
Integrating this in the, 𝑡1 ≤ 𝑡 ≤ 𝑡1 gives;
𝑡2
1/2
𝑑𝑠
𝑑𝑥1 2
𝑑𝑥2 2
𝑑𝑥3 2
∫
𝑑𝑡 = 𝑠 = 𝑠(𝑡2 ) − 𝑠(𝑡1 ) = ∫ [(
) +(
) +(
) ]
𝑑𝑡
𝑑𝑡
𝑑𝑡
𝑡1 𝑑𝑡
𝑡2
𝑑𝑡
𝑡1
Example 5.5
Find the arc length of arc along the helix 𝒓(𝑡) = 𝑐𝑜𝑠𝑡𝒊 + 𝑠𝑖𝑛𝑡𝒋 + 𝛼𝑡𝒌, between the points 𝑡 = 0
and 𝑡 = 2𝜋, with α a constant.
Solution
𝑡2
1/2
𝑑𝑥1 2
𝑑𝑥2 2
𝑑𝑥3 2
𝑠 = ∫ [(
) +(
) +(
) ]
𝑑𝑡
𝑑𝑡
𝑑𝑡
𝑑𝑡
𝑡1
𝑑𝑥1
𝑑
= 𝑑𝑡 (𝑐𝑜𝑠𝑡) = −𝑠𝑖𝑛𝑡,
𝑑𝑡
𝑑𝑥1
𝑑
𝑑𝑥
𝑑
= 𝑑𝑡 (𝑠𝑖𝑛𝑡) = 𝑐𝑜𝑠𝑡 and 𝑑𝑡1 = 𝑑𝑡 (𝛼𝑡) = 𝛼
𝑑𝑡
2𝜋
2𝜋
𝑠 = ∫ [(−𝑠𝑖𝑛𝑡)2 + (𝑐𝑜𝑠𝑡)2 + (𝛼)2 ]1/2 𝑑𝑡 = ∫ [1 + 𝛼 2 ]1/2 𝑑𝑡
0
0
2𝜋
2
∴ 𝑠 = √1 + 𝛼 2 ∫ 𝑑𝑡 = √1 + 𝛼 2 [𝑡]2𝜋
0 = 2𝜋 √1 + 𝛼
0
5.3 The tangent vector
The unit tangent vector, T along a path Γ as a function of t is given by;
𝑇=
(𝑑𝒓/𝑑𝑡)
|𝑑𝒓/𝑑𝑡|
𝑑𝒓
𝑑𝒓
i.e. 𝑑𝑡 = 𝑇 |𝑑𝑡 |
Let F(x, ,y, z) be defined along a piece wise smooth space curve, Γ, along which the arc length is
s and let Γ extend frpm point r1 at 𝑠 = 𝑠1 to point r2 at 𝑠 = 𝑠2 . If T(s) is the unit tangent vector to
𝑠
Γ at arc length, s, then the expression; 𝐼 = ∫𝑠 2 𝑭. 𝑻𝑑𝑠 is called the line integral of F or scalar line
1
integral of F along the space curve Γ.
But 𝑇𝑑𝑠 = 𝑑𝑟, hence;
𝑠2
𝐼 = ∫ 𝑭𝑑𝒓
𝑠1
This expression can be used to compute the work done by a force on its point of application;
𝑠2
𝑊 = ∫ 𝑭𝑑𝒓
𝑠1
𝑑𝒓
Substituting for, 𝑑𝒓 = (𝑑𝑡 ) 𝑑𝑡, to change the expression to time dependence, gives;
𝑠2
𝑊 = ∫ 𝑭. (
𝑠1
𝑑𝒓
) 𝑑𝑡
𝑑𝑡
5.3.1 Circulation and irritation flow
The line integral in an area of fluid mechanics is called the flow of the liquid along Γ because 𝑑𝒓 =
𝑑𝒓
(𝑑𝑡 ) 𝑑𝑠 = 𝑻𝑑𝑠 where T is the unit tangent along Γ.
Hence 𝒒. 𝑻 is the component of the flow along Γ where q is the fluid velocity vector.
The circulation K of fluid is defined as the flow around a closed curve Γ and it is given by;
𝐾 = ∮ 𝒒. 𝑑 = ∮𝒒. 𝑻𝑑𝑠
𝛤
𝛤
Where the symbol ∮𝛤 is used to indicate that the line integral of q.dr is taken around the closed
curve Γ
Example 5.6
Find the line integral of 𝑭 = −𝑦𝑧 2 𝒊 + 𝑥𝑧 2 𝒋 + 𝑦𝑧𝒌 along the helix Γ given by 𝒓(𝑡) = 𝑐𝑜𝑠𝑡𝒊 +
𝑠𝑖𝑛𝒋 + 𝑡𝒌 from t = 0 to t = 2π.
Solution
Differentiation of r gives;
𝑑𝒓
= −𝑠𝑖𝑛𝑡𝒊 + 𝑐𝑜𝑠𝑡𝒋 + 𝒌
𝑑𝑡
On the helix; 𝑥 = 𝑐𝑜𝑠𝑡, 𝑦 = 𝑠𝑖𝑛𝑡 𝑎𝑛𝑑 𝑧 = 𝑡
Hence the general vector – valued function becomes;
𝑭 = −𝑡 2 𝑠𝑖𝑛𝑡𝒊 + 𝑡 2 𝑐𝑜𝑠𝑡𝒋 + 𝑡𝑠𝑖𝑛𝑡𝒌
𝑑𝒓
Hence, 𝑭. (𝑑𝑡 ) = (−𝑡 2 𝑠𝑖𝑛𝑡𝒊 + 𝑡 2 𝑐𝑜𝑠𝑡𝒋 + 𝑡𝑠𝑖𝑛𝑡𝒌). (−𝑠𝑖𝑛𝑡𝒊 + 𝑐𝑜𝑠𝑡𝒋 + 𝒌) = 𝑡 2 + 𝑡𝑠𝑖𝑛𝑡
Hence the line integral is;
2𝜋
8
∫ 𝑭. 𝑑𝒓 = ∫ (𝑡 2 + 𝑡𝑠𝑖𝑛𝑡)𝑑𝑡 = 𝜋 3 − 2𝜋
3
𝛤
0
Exercise 5.2
1. Find the following:
(a) ∫ 𝑡𝑠𝑖𝑛𝑡𝒊 + 3𝑡 2 𝒋 − 3𝑡𝒌 𝑑𝑡
2
(b) ∫0 ln(1 + 3𝑡) 𝒊 + (𝑡 3 − 2𝑡)𝒋 + 𝑡𝑒 𝑡 𝒌 𝑑𝑡
(c) ∫ 𝑐𝑜𝑠ℎ2 𝑡𝒊 + 2𝑠𝑖𝑛2 2𝑡𝒋 + 𝒌 𝑑𝑡
𝜋
(d) ∫0 (1 + 3𝑡 2 )𝒊 + 𝑐𝑜𝑠4𝑡𝒋 + (𝑡 2 − 4)𝒌 𝑑𝑡
2. Find the arc length along the circular helix 𝒓(𝑡) = 𝑎𝑐𝑜𝑠𝑡𝒊 + 𝑎𝑠𝑖𝑛𝑡𝒋 + 𝛼𝑡𝒌, between the points
corresponding to t = π to t = 3π/2
3. Given the vector valued function, 𝑭 = −𝑧𝒊 + 𝑥𝒋 − 𝑦𝒌, find the scalar integral of F along the
space curve 𝒓(𝑡) = 𝑠𝑖𝑛𝑡𝒊 − 𝑐𝑜𝑠𝑡𝒋 + 𝑒 𝑡 𝒌 between the points t = 0 and t = π/2
5.4 Direction derivatives and gradient operator
Consider a function 𝑤 = 𝑓(𝑥, 𝑦, 𝑧) with continuous first order partial derivatives with respect to
x, y, and z, that is defined in some region D of space and let Γ be a space curve in D having
parametric equations 𝑥 = 𝑥(𝑡), 𝑦 = 𝑦(𝑡)𝑎𝑛𝑑 𝑧 = 𝑧(𝑡).
By chain rule;
𝑑𝑤 𝜕𝑓 𝑑𝑥 𝜕𝑓 𝑑𝑦 𝜕𝑓 𝑑𝑧
=
+
+
𝑑𝑡
𝜕𝑥 𝑑𝑡 𝜕𝑦 𝑑𝑡 𝜕𝑧 𝑑𝑡
It is seen from this that
𝜕𝑓
𝜕𝑥
𝜕𝑓
𝜕𝑓
𝑑𝑤
𝑑𝑡
can be interpreted as the scalar product of two vectors;
𝑑𝑥
𝑑𝑦
𝑑𝑧
𝒊 + 𝜕𝑦 𝒋 + 𝜕𝑧 𝒌 and 𝑑𝑡 𝒊 + 𝑑𝑡 𝒋 + 𝑑𝑡 𝒌
The first vector is denoted by;
𝜕𝑓
𝜕𝑓
𝜕𝑓
𝑔𝑟𝑎𝑑𝑓 = 𝜕𝑥 𝒊 + 𝜕𝑦 𝒋 + 𝜕𝑧 𝒌 , which is called the gradient of the scalar function f expressed in terms
of Cartesian coordinates.
𝑑𝒓
𝑑𝑥
𝑑𝑦
𝑑𝑧
The second vector, 𝑑𝑡 = 𝑑𝑡 𝒊 + 𝑑𝑡 𝒋 + 𝑑𝑡 𝒌 is seen to be a vector that is tangent to the space curve
Γ.
Another notation for 𝑔𝑟𝑎𝑑𝑓 that is commonly used is;
∇𝑓 =
𝜕𝑓
𝜕𝑓
𝜕𝑓
𝒊+
𝒋+
𝒌
𝜕𝑥
𝜕𝑦
𝜕𝑧
If vector v, given by, 𝒗 = 𝑙𝒊 + 𝑚𝒋 + 𝑛𝒌 is a unit vector, with l, m, and n being directional cosines
of the tangent to the space curve Γ;
𝑑𝑥
𝑙 = 𝑑𝑡⁄𝑑𝒓 ,
| |
𝑑𝑡
With,
𝑑𝒓
𝑑𝑥 2
𝑑𝑦
𝑑𝑧
𝑑𝑡
𝑚 = ⁄𝑑𝒓 , 𝑎𝑛𝑑 𝑛 = 𝑑𝑡⁄𝑑𝒓
| |
| |
𝑑𝑡
𝑑𝑡
𝑑𝑦 2
1/2
𝑑𝑦 2
|𝑑𝑡 | = [( 𝑑𝑡 ) + ( 𝑑𝑡 ) + ( 𝑑𝑡 ) ]
Since the scalar product (dot product) of a vector F and the unit vector v is the projection of F in
the direction of v, it follows that the directional derivative of f in the direction v is given by;
𝐷𝑣 𝑓 = 𝒗. 𝑔𝑟𝑎𝑑𝑓 = 𝑙
𝜕𝑓
𝜕𝑓
𝜕𝑓
+𝑚
+𝑛
𝜕𝑥
𝜕𝑦
𝜕𝑧
This expression can be used even when v is not a tangent to the space curve, Γ.
Example 5.7
Find the directional derivative of 𝑓 = 𝑥 2 + 3𝑦 2 + 2𝑧 2 in the direction of the vector 2𝒊 − 𝒋 − 2𝒌,
and determine its value at the point (1, -3, 2).
Solution
∇𝑓 =
𝜕𝑓
𝜕𝑓
𝜕𝑓
𝒊+
𝒋+
𝒌 = 2𝑥𝒊 + 6𝑦𝒋 + 4𝑧𝒌
𝜕𝑥
𝜕𝑦
𝜕𝑧
The unit vector in the required direction is;
𝒗=
2𝒊 − 𝒋 − 2𝒌
=
2
1
2
𝒊− 𝒋− 𝒌
3
3
3
√22 + 1 + 22
Hence the required direction derivative is;
2
1
2
4
8
𝐷𝑣 𝑓 = ( 𝒊 − 𝒋 − 𝒌) (2𝑥𝒊 + 6𝑦𝒋 + 4𝑧𝒌) = 𝑥 − 2𝑦 − 𝑧
3
3
3
3
3
At (1, -3, 2);
𝐷𝑣 𝑓 =
4
16
+6−
=2
3
3
5.4.1 Rules of the gradient operator
Let the gradients of f and g be defined over a region D. Then the gradient operator has the following
properties:
1. Gradient of a constant multiple of f:
𝑔𝑟𝑎𝑑(𝐶𝑓) = 𝐶𝑔𝑟𝑎𝑑𝑓, where C is scalar constant.
2. Gradient of a sum or difference of functions;
∇(𝑓 ± 𝑔) = ∇f ± ∇g
3. Gradient of a product of functions;
∇(𝑓𝑔) = 𝑓∇𝑔 + 𝑔∇𝑓
4. Gradient of a quotient;
𝑓
𝑔∇𝑓 − 𝑓∇𝑔
∇( ) =
𝑔
𝑔2
5.4.2 Application of the gradient function
One of the applications of the gradient function involves determination of the plane tangent to the
surface S, defined by the function f(x, y, z) = constant at a point (x0, y0, z0) on the surface S.
Consider the function 𝑤 = 𝑓(𝑥, 𝑦, 𝑧) − 𝐶 so that the surface S then has the equation 𝑤 = 0. Let
any space curve, Γ, on S have the parametric equations 𝑥 = 𝑥(𝑡), 𝑦 = 𝑦(𝑡), 𝑎𝑛𝑑 𝑧 = 𝑧(𝑡).
Differentiating w with respect to t gives;
𝑑𝑤 𝜕𝑓 𝑑𝑥 𝜕𝑓 𝑑𝑦 𝜕𝑓 𝑑𝑧
=
+
+
𝑑𝑡
𝜕𝑥 𝑑𝑡 𝜕𝑦 𝑑𝑡 𝜕𝑧 𝑑𝑡
But on S, w = 0, therefore;
𝜕𝑓 𝑑𝑥 𝜕𝑓 𝑑𝑦 𝜕𝑓 𝑑𝑧
+
+
=0
𝜕𝑥 𝑑𝑡 𝜕𝑦 𝑑𝑡 𝜕𝑧 𝑑𝑡
This result shows that any space curve, Γ, on S must be orthogonal to gradf and so at any point P
on the surface, the vector gradf is normal to the surface.
The equation of the plane with normal n containing a point P0 with position vector r0 is given by;
(𝒓 − 𝒓0 )𝒏 = 𝟎
r is a position vector of an arbitrary point (x, y, z) on the plane.
If 𝒓 = 𝑥𝒊 + 𝑦𝒋 + 𝑧𝒌 and 𝒓0 = 𝑥0 𝒊 + 𝑦0 𝒋 + 𝑧0 𝒌, n is defined with gradf at pont P0 i.e.
𝜕𝑓
𝜕𝑓
𝜕𝑓
𝒏 = 𝑔𝑟𝑎𝑑𝑓(𝑃0 ) = ( ) 𝒊 + ( ) 𝒋 + ( ) 𝒌
𝜕𝑥 𝑃0
𝜕𝑦 𝑃
𝜕𝑧 𝑃0
0
Example 5.8
Find the tangent plane at the point (2, -1, 3) on the sphere (𝑥 − 1)2 + (𝑦 + 1)2 + (𝑧 − 4)2 = 3
Solution
It is first necessary to check whether the point (2, -1, 3) lies on the given sphere.
Substituting this point into the sphere equation, we have;
(2 − 1)2 + (−1 + 1)2 + (3 − 4)2 ≡ 3, hence the point lies on the sphere.
With 𝑓 = (𝑥 − 1)2 + (𝑦 + 1)2 + (𝑧 − 4)2 − 3
⇒
𝜕𝑓
= 2(𝑥 − 1),
𝜕𝑥
𝜕𝑓
𝜕𝑓
= 2(𝑦 + 2) 𝑎𝑛𝑑
= 2(𝑧 − 4)
𝜕𝑦
𝜕𝑧
With P0 = (2, -1, 3)
𝜕𝑓
( ) = 2(2 − 1) = 2
𝜕𝑥 𝑃0
𝜕𝑓
(𝜕𝑦)
= 2(−1 + 2) = 2 and
𝑃0
𝜕𝑓
( ) = 2(3 − 4) = −2
𝜕𝑧 𝑃0
This gives the normal vector as;
𝒏 = 2𝒊 + 2𝒋 − 2𝒌
The equation of the required plane is;
(𝑥 − 1)2 + (𝑦 + 1)2 + (𝑧 − 3). (−2) = 0 ⇒ 𝑥 + 𝑦 − 𝑧 = −2
Exercise 5.3
1. Find the derivative of the scalar function f in the direction of the vector v and find its value at
the given point P.
(a) 𝑓 = 𝑥𝑠𝑖𝑛𝑦 + 𝑦𝑐𝑜𝑠𝑥, with 𝒗 = 𝒊 + 2𝒋 and P(π/4, 0) (Ans: √5(𝜋 + 2√2)/10)
(b) 𝑓 = 𝑥𝑒 𝑥𝑦 + 2𝑥 − 𝑦, with 𝒗 = 𝒊 + 𝟒𝑗 and P (-2, 1)
(Ans: (15𝑒 −2 − 2)/√17)
𝜋
(c) 𝑓 = sin(𝑥𝑦) + 𝑒
3𝑥𝑧
, 𝒗 = 𝒊 − 2𝒋 + 2𝒌 and P(1, π/4, 1) (𝐴𝑛𝑠:
√2( 8 −1)
3
+ 2𝑒 3 )
(d) 𝑓 = 𝑠𝑖𝑛ℎ(𝑥𝑦 2 𝑧 + 3𝑦), 𝒗 = 2𝒊 + 𝒌 and P(2, -3, 1) 𝐴𝑛𝑠: 4√5𝑐𝑜𝑠ℎ2
2. Find the equation of the tangent plane to the surface 𝑥 3 + 3𝑥𝑦 + 𝑧 2 = 11 at the point on the
surface, (1, 2, 2)
3. Derive the vector equation of the straight line that is normal to the surface f(x y, z) = constant
at a point with position vector r0 on the surface.
4. Find the equation of the tangent plane to the surface sin(𝑥𝑦) + 2 cos(𝑦𝑧) + 3𝑥 = 4 at the
point on the surface (1, π/2, 1).
5.5 Conservative fields and potential functions
𝒓
If the value of the line integral ∫𝒓 2 𝑭𝑑𝒓 along a path Γ joining the points r1 and r2 in a region D of
1
space is independent of the choice of the path Γ in D, the field F is called a conservative field.
Path invariance and integrals around loops
If F is a conservative field in a region D, then ∮𝛤 𝑭𝑑𝒓 = 0 around every closed loop Γ in D hence
if ∮𝛤 𝑭𝑑𝒓 = 0 around every closed loop Γ in region D, then F is conservative field in D.
5.5.1 Condition for the path independence of a line integral
Let F be a vector field defined on an open interval D of space and let Γ be any path in D connecting
two arbitrary points P at r1 and Q at r2 in D, then;
(i) If the line integral ∮𝛤 𝑭𝑑𝒓 is independent of the path Γ joining r1 andr2 a scalar field exists
such that 𝑭 = 𝑔𝑟𝑎𝑑𝑓
(ii) If 𝑭 = 𝑔𝑟𝑎𝑑𝑓 with 𝑭 = 𝐹1 𝒊 + 𝐹2 𝒋 + 𝐹3 𝒌 and 𝒓(𝑡) = 𝑥(𝑡)𝒊 + 𝑦(𝑡)𝒋 + 𝑧(𝑡)𝒌, then;
𝑄
∮ 𝑭. 𝑑𝒓 = ∫(𝐹1 𝑑𝑥 + 𝐹2 𝑑𝑦 + 𝐹3 𝑑𝑧) = 𝑓(𝑄) − 𝑓(𝑃)
𝛤
𝑃
5.5.2 Testing for conservativeness and finding the potential function
The vector field 𝐹 = 𝐹1 𝑖 + 𝐹2 𝑗 + 𝐹3 𝑘 with components that are continuous and differentiable is a
conservative field if:
(i)
𝜕𝐹1
𝜕𝐹
𝜕𝐹
𝜕𝐹
= 𝜕𝑥2 , 𝜕𝑧2 = 𝜕𝑦3 , 𝑎𝑛𝑑
𝜕𝑦
𝜕𝐹3
𝜕𝐹
= 𝜕𝑧1
𝜕𝑥
When F is a conservative field, the scalar potential function, f, is found by integrating the
equations;
𝜕𝑓
𝜕𝑓
𝜕𝑓
(ii) 𝜕𝑥 = 𝐹1 , 𝜕𝑦 = 𝐹2 𝑎𝑛𝑑 𝜕𝑧 = 𝐹3
Proof
If F is a conservative field, the n a scalar potential function, f exists such that, 𝑭 = 𝑔𝑟𝑎𝑑𝑓, so;
𝐹1 𝒊 + 𝐹2 𝒋 + 𝐹3 𝒌 =
𝜕𝑓
𝜕𝑓
𝜕𝑓
𝒊+
𝒋+
𝒌
𝜕𝑥
𝜕𝑦
𝜕𝑧
Equating components leads to;
𝜕𝑓
𝜕𝑓
𝜕𝑓
= 𝐹1 ,
= 𝐹2 𝑎𝑛𝑑
= 𝐹3
𝜕𝑥
𝜕𝑦
𝜕𝑧
The equality of mixed derivatives requires that;
𝜕 𝜕𝑓
𝜕𝐹1
𝜕 𝜕𝑓
𝜕𝐹2
( )=
=
( )=
𝜕𝑦 𝜕𝑥
𝜕𝑦
𝜕𝑥 𝜕𝑦
𝜕𝑥
The other two results in (i) are obtained in a similar fashion by equating the other two missed
derivatives.
Example 5.9
Show that 𝑭 = 𝑦 2 𝑧𝒊 + 2𝑥𝑦𝑧𝒋 + (2𝑧 + 𝑥𝑦 2 )𝒌 is a conservative field in any open connected region
𝑄
space, and find the associated scalar potential, f. use the result to evaluate the line integral ∫𝑃 𝑭. 𝑑𝒓,
where P is the point (2, 1, 1) and Q is a point (3, 2, 2)
Solution
𝐹1 = 𝑦 2 𝑍,
𝐹2 = 2𝑥𝑦𝑧 𝑎𝑛𝑑 𝐹3 = 2𝑧 + 𝑥𝑦 2
𝜕𝐹1
𝜕𝐹2
𝜕𝐹2
𝜕𝐹3
𝜕𝐹1
𝜕𝐹3
= 𝑦 2 𝑧,
= 2𝑦𝑧,
= 2𝑥𝑦,
= 2𝑥𝑦,
= 𝑦 2 𝑎𝑛𝑑
= 𝑦2
𝜕𝑦
𝜕𝑥
𝜕𝑧
𝜕𝑦
𝜕𝑧
𝜕𝑥
𝜕𝐹
𝜕𝐹
𝜕𝐹
𝜕𝐹
Since 𝜕𝑦1 = 𝜕𝑥2 , 𝜕𝑧2 = 𝜕𝑦3 𝑎𝑛𝑑
𝜕𝐹1
𝜕𝑧
𝜕𝐹
= 𝜕𝑥3 , the given vector field is conservative.
To find the scalar potential function we use;
𝜕𝑓
𝜕𝑥
𝜕𝑓
𝜕𝑦
𝜕𝑓
𝜕𝑧
= 𝐹1 = 𝑦 2 𝑧;
= 𝐹2 = 2𝑥𝑦𝑧 and;
= 𝐹3 = 2𝑧 + 𝑥𝑦 2
Integrating the first equation with respect to x gives;
𝑓 = 𝑥𝑦 2 𝑧 + 𝑟(𝑦, 𝑧), where r(y, z) is an arbitrary function of y and z. combining this result with
𝜕𝑓
the expression for 𝜕𝑦 given earlier, we get;
𝜕𝑓
𝜕𝑟
𝜕𝑟
= 2𝑥𝑦𝑧 + 𝜕𝑦 = 2𝑥𝑦𝑧 ⇒ 𝜕𝑦 = 0
𝜕𝑦
Hence r = s(z), with s(z) an arbitrary function of z only.
𝜕𝑓
Finally using result with the expression of 𝜕𝑧 given earlier, we get,
𝜕𝑓
𝑑𝑠
= 𝑥𝑦 2 +
= 2𝑧 + 𝑥𝑦 2
𝜕𝑧
𝑑𝑧
𝑑𝑠
Hence, 𝑑𝑧 = 2𝑧 ⇒ 𝑠 = 𝑧 2 + 𝐶
Combining these results gives;
𝑓 = 𝑥𝑦 2 𝑧 + 𝑧 2 + 𝐶
As F is conservative, the line integral between two points in an open connected region D can be
evaluate by;
𝑄
∫ 𝑭. 𝑑𝒓 = 𝑓(𝑄) − 𝑓(𝑃) = (𝑥𝑦 2 𝑧 + 𝑧 2 + 𝐶)(3,2,2) − (𝑥𝑦 2 𝑧 + 𝑧 2 + 𝐶)(2,1,1)
𝑃
28 − 3 = 25
Exercise 5.4
Show that the following vector fields F are conservative and by finding the scalar potential, f,
𝑄
evaluate the integral ∫𝑃 𝑭𝑑𝒓 between the given points P and Q.
(a) 𝑭 = (𝑧 3 + 6𝑥𝑦 2 )𝒊 + 6𝑥 2 𝑦𝒋 + 3𝑥𝑧 2 𝒌 with P(1, 0, 1) and Q(2, 1, 0)
Ans: 𝑓 = 𝑥𝑧 3 + 3𝑥 2 𝑦 2 + 𝑐𝑜𝑛𝑠𝑡, I = 11
(b) 𝑭 = 𝑒 𝑥𝑦𝑧 (1 + 𝑥𝑦𝑧)𝒊 + 𝑥 2 𝑧𝑒 𝑥𝑦𝑧 𝒋 + 𝑥 2 𝑦𝑒 𝑥𝑦𝑧 𝒌 with P(0, 0, 0) and Q(1, 1, 2).
Ans: 𝑓 = exp(𝑥𝑦𝑧) + 𝑐𝑜𝑛𝑠𝑡, I = e2
5.6 Divergence and curl of a vector
The divergence of a vector associates a scalar function with a differentiable vector field F. the curl
of a vector associates a vector function with a vector F.
If 𝑭 = 𝐹1 𝒊 + 𝐹2 𝒋 + 𝐹3 𝒌 is differentiable vector field, the divergence of F written as 𝑑𝑖𝑣𝑭 is the
scalar function defined in terms of Cartesian coordinates as;
𝑑𝑖𝑣𝑭 =
𝜕𝐹1 𝜕𝐹2 𝜕𝐹3
+
+
𝜕𝑥
𝜕𝑦
𝜕𝑧
The divergence can also be expressed in terms of the operator ‘del’ as;
∇= 𝒊
𝜕
𝜕
𝜕
+𝒋
+𝒌
𝜕𝑥
𝜕𝑦
𝜕𝑧
By writing;
𝑑𝑖𝑣𝑭 = ∇𝐅 = (𝒊
𝜕
𝜕
𝜕
+𝒋
+ 𝒌 ) . (𝐹1 𝒊 + 𝐹2 𝒋 + 𝐹3 𝒌)
𝜕𝑥
𝜕𝑦
𝜕𝑧
Example 5.10
Find 𝑑𝑖𝑣𝑭 when 𝑭 = 𝑥𝑦 2 𝒊 + 3𝑥𝑦𝑧𝒋 − 4𝑥𝑧𝒌
Solution
𝑑𝑖𝑣𝑭 =
𝜕
𝜕
𝜕
(𝑥𝑦 2 ) +
(3𝑦𝑧) + (−4𝑥𝑧) = 𝑦 2 + 3𝑧 − 4𝑥
𝜕𝑥
𝜕𝑦
𝜕𝑧
Curl of a vector
The curl of the vector 𝑭 = 𝐹1 𝒊 + 𝐹2 𝒋 + 𝐹3 𝒌 is defined as;
𝜕𝐹
𝜕𝐹
𝜕𝐹
𝜕𝐹
𝜕𝐹
𝜕𝐹
𝐶𝑢𝑟𝑙𝑭 = ( 𝜕𝑦3 − 𝜕𝑧2 ) 𝒊 + ( 𝜕𝑧1 − 𝜕𝑥3 ) 𝒋 + ( 𝜕𝑥2 − 𝜕𝑦1 ) 𝒌
This can be easily remembered from;
𝒊
𝜕
𝐶𝑢𝑟𝑙𝑭 = |
𝜕𝑥
𝐹1
𝒋
𝜕
𝜕𝑦
𝐹2
𝒌
𝜕
|
𝜕𝑧
𝐹3
Example 5.11
Given 𝑭 = 𝑥𝑦𝑧 2 𝒊 + 𝑥 2 𝑦𝑧𝒋 + 𝑥𝑦 2 𝒌, find 𝑐𝑢𝑟𝑙𝑭
Solution
𝒊
𝜕
𝐶𝑢𝑟𝑙𝑭 = ||
𝜕𝑥
𝑥𝑦𝑧 2
𝒋
𝒌
𝜕
𝜕
||
𝜕𝑦
𝜕𝑧
𝑥 2 𝑦𝑧 𝑥𝑦 2
𝜕
𝜕
𝜕
𝜕
= ( (𝑥𝑦 2 ) − (𝑥 2 𝑦𝑧)) 𝒊 − ( (𝑥𝑦 2 ) − (𝑥𝑦𝑧 2 )) 𝒋
𝜕𝑦
𝜕𝑧
𝜕𝑥
𝜕𝑧
+(
𝜕 2
𝜕
(𝑥 𝑦𝑧) −
(𝑥𝑦𝑧 2 )) 𝒌
𝜕𝑥
𝜕𝑦
∴ 𝑐𝑢𝑟𝑙𝑭 = (2𝑥𝑦 − 𝑥 2 𝑦)𝒊 − (𝑦 2 − 2𝑥𝑦𝑧)𝒋 + (2𝑥𝑦𝑧 − 𝑥𝑧 2 )𝒌
= 𝑥𝑦(2 − 𝑥)𝒊 − 𝑦(𝑦 − 2𝑥𝑧)𝒋 + 𝑥𝑧(2𝑦 − 𝑧)𝒌
Question
Show that if ϕ is any scalar function with continuous first and second order derivatives, then
𝑐𝑢𝑟𝑙(𝑔𝑟𝑎𝑑𝜑) = 0
5.6.1 Curl test for divergence
A vector F is a conservative vector field, i.e. 𝑭 = 𝑔𝑟𝑎𝑑𝑓 where f is the associated scalar potential,
then; 𝑐𝑢𝑟𝑙𝑭 = 0
Example 5.12
For what values of a and b is the vector field, 𝑭 = (𝑥 + 𝑧)𝒊 + 𝑎(𝑦 + 𝑧)𝒋 + 𝑏(𝑥 + 𝑦)𝒌 a
conservative field.
Solution
𝒊
𝜕
𝐶𝑢𝑟𝑙𝑭 = |
𝜕𝑥
𝑥+𝑧
𝒋
𝒌
𝜕
𝜕
| = (𝑏 − 𝑎)𝒊 + (1 − 𝑏)𝒋
𝜕𝑦
𝜕𝑧
𝑎(𝑦 + 𝑧) 𝑏(𝑥 + 𝑦)
For conservativeness, 𝑐𝑢𝑟𝑙𝑭 = 0
∴ 𝑏 − 𝑎 = 0 𝑎𝑛𝑑 1 − 𝑏 = 0 ⇒ 𝑏 = 𝑎 = 1
5.6.2 Properties of grad, div, and curl
1. 𝑐𝑢𝑟𝑙(𝑔𝑟𝑎𝑑𝜑) = 0
2. 𝑑𝑖𝑣(𝑐𝑢𝑟𝑙𝑭) = 0
3. 𝑐𝑢𝑟𝑙(𝜑𝑭) = 𝜑𝑐𝑢𝑟𝑙𝑭 − 𝑭𝑔𝑟𝑎𝑑𝜑
4. 𝑔𝑟𝑎𝑑(𝑭. 𝑮) = 𝑭 × 𝑐𝑢𝑟𝑙𝑮 + 𝑮 × 𝑐𝑢𝑟𝑙𝑭 + (𝑭. ∇)𝑮 + (𝑮. ∇)𝑭
5. 𝑑𝑖𝑣(𝑭 × 𝑮) = 𝑮. 𝑐𝑢𝑟𝑙𝑭 − 𝑭. 𝑐𝑢𝑟𝑙𝑮
6. 𝑐𝑢𝑟𝑙(𝑭 × 𝑮) = 𝑭𝑑𝑖𝑣𝑮 − 𝑮𝑑𝑖𝑣𝑭 + (𝑮. ∇) − (𝑭. ∇)𝑮
7. 𝑐𝑢𝑟𝑙(𝑐𝑢𝑟𝑙𝑭) = 𝑔𝑟𝑎𝑑(𝑑𝑖𝑣𝑭) − ∆𝑭
Example 5.13
Find 𝑐𝑢𝑟𝑙(𝑐𝑢𝑟𝑙𝑭) given that; 𝑭 = 𝑥 2 𝑦 2 𝒊 + 𝑦 2 𝑧 2 𝒋 + 𝑥 2 𝑧 2 𝒌
Solution
𝑑𝑖𝑣𝑭 = 2𝑥𝑦 2 + 2𝑦𝑧 2 + 2𝑧𝑥 2
Hence;
𝑔𝑟𝑎𝑑(𝑑𝑖𝑣𝑭) = (2𝑦 2 + 4𝑥𝑦)𝒊 + (2𝑧 2 + 4𝑥𝑦)𝒋 + (2𝑥 2 + 4𝑦𝑧)𝒌
𝜕2
𝜕2
𝜕2
∆𝑭 = ( 2 + 2 + 2 ) (𝑥 2 𝑦 2 𝒊 + 𝑦 2 𝑧 2 𝒋 + 𝑥 2 𝑧 2 𝒌)
𝜕𝑥
𝜕𝑦
𝜕𝑧
2
2 )𝒊
= 2(𝑥 + 𝑦
+ 2(𝑦 2 + 𝑧 2 )𝒋 + 2(𝑥 2 + 𝑧 2 )𝒌
Using,
𝑐𝑢𝑟𝑙(𝑐𝑢𝑟𝑙𝑭) = 𝑔𝑟𝑎𝑑(𝑑𝑖𝑣𝑭) − ∆𝑭
∴ 𝑐𝑢𝑟𝑙(𝑐𝑢𝑟𝑙𝑭) = (4𝑥𝑧 − 2𝑥 2 )𝒊 + (4𝑥𝑦 − 2𝑦 2 )𝒋 + (4𝑦𝑧 − 2𝑧 2 )𝒌
Assignment
Read and make notes about application of vector calculus on volume integral and surface integrals.