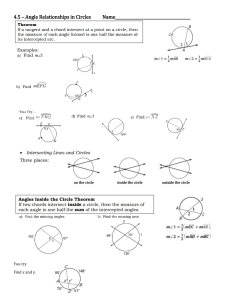
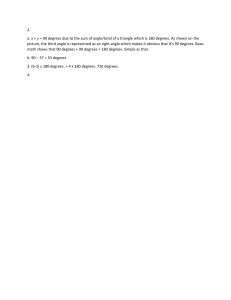
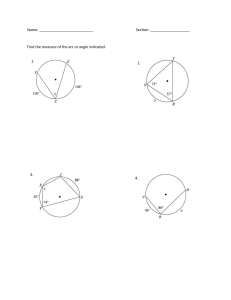
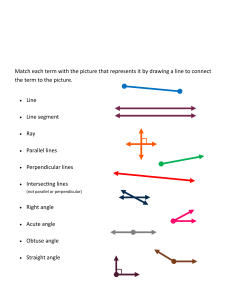
Mechanical Analysis of a Gearless Elbow Transmission Mechanism Adebayo Badmos and Fyzal Badarudeen Mechanical Engineering Higher Colleges of Technology Al Ain Campus, UAE Abstract A three-pin gearless elbow transmission mechanism was designed and fabricated and the operation was studied at different input torques and different angles between the input and out shafts. The operation of the mechanism was simulated using the SolidWorks 3D software and different pin materials were investigated for stress, strain, and deformation at varying input torque and angles. Three input torques of 0.4, 0.8, and 1.5 Nm and six different angles from 0 to 90 degrees between the input and output shafts were investigated. Generally, and as should be expected, the stress, strain, and deformation developed in the pin materials increase with the input torque. The stress generally appears to decrease with the angle from 0 degrees to a minimum at 30 degrees angle and then subsequently increases with the angle to its maximum at 90 degrees. Whereas the strain also appears to decrease from 0 degrees to a minimum at 30 degrees, the value fluctuates with a pattern that appears repeated for two regions, 0-45 degrees and 45 to 90 degrees with the values at 0 and 90 degrees the same. The deformation of the pin materials shows a reverse pattern to that of the stress, increasing with the angle from 0 degrees to its maximum at 30 degrees and then decreasing to its minimum at 90 degrees. Keywords: Gearless elbow transmission, shafts angle, input torque, stress, strain, deformation Introduction The gearless elbow mechanism, also known as gearless transmission, or Orbital transmission mechanism, is simple in construction and mainly used in place of bevel gears where the motion is to be transmitted at 90⁰ [1]. The angle between the input and output shafts is generally taken as 90⁰ [2, 4, 5, 6, 7, 8, 11, 12, 14, 15], however, the mechanism can also be used to transmit power at varying angles [4, 10, 11, 14]. The mechanism is usually made with 3 L-pins but the system operates more smoothly with increasing number of L-pins [9]. It system be used for any shaft diameter [13] and whereas the efficiency of the gear drive is only up to 42%, the elbow mechanism can go up to 90-92% efficiency [13]. Typically, odd numbers of pins are used and a minimum of 3 are required for the system to run. The pins are inserted into holes on the cylindrical discs connected to the input and output shafts and the motion is transmitted through the simultaneous sliding and rotating movement of the pins. The mechanism studied in this work, shown in Figure 1, consists of 3 L-pins at an angular spacing of 120⁰ and the power is supplied from a motor. Figure 1: Layout of L-Pin Elbow Mechanism Experimental Simulation and Analysis The effect of input torque on the operation of the mechanism was studied with 3 input torques of 0.4, 0.8, and 1.5 Nm, and the effect of angular orientation was investigated by varying the angles between the input and output shafts from 0o to 90o, with 0o at the point where the two shafts are aligned in a straight line. The experimental simulation was carried out with SolidWorks 3D modeling and simulation software. The operation of the mechanism was simulated to study the stress, strain, and deformation developed in the pin material for each input torque at different angles between the shafts. The effect of the pin material was also investigated using the capability of the software to independently specify the materials for the individual model components. Results and Discussion Stress versus Angular Orientation Figure 2 shows the plot of stress for 1020-Steel as a function of the angle between the input and output shafts for different input torques. The stress is shown to increase with torque as expected with the maximum of the input torques investigated, 1.5 Nm, producing the highest stress, and the minimum torque, 0.4 Nm, the least stress for all the angles studied. For each torque, the stress is shown to fall continuously with an increasing angle to a minimum value at the same angle of 30o, then rises but fluctuates between 30 and 60o then rises continuously with the increasing angle from 60 to 90o. 1020 Steel-0.4 Nm Torque 30.000 120.000 100.000 26.000 Stress, MPa Stress, MPa 28.000 24.000 22.000 80.000 60.000 40.000 20.000 20.000 0 a 0.4 Nm-Torque 0.8 Nm-Torque 1.5Nm-Torque 1020 STEEL 20 40 60 Angle 80 100 0.000 b 0 50 Angle Figure 2: Stress versus orientation angle (a) and effect of input speed (b) 100 Strain versus Angular Orientation Figure 3 shows the plot of strain as a function of the angle for different input torques. The pattern is similar to that of the stress with the strain increases with increasing torque. For all the input torques, the strain is also shown to decrease continuously with an increasing angle to a minimum value at an angle of 30o for all the torques. Subsequently, the value increases generally with increasing angles, however, it fluctuates alternately between angles from 30 to 90o. 1020 Steel: 0.4 Nm - Torque 0.4 Nm-Torque 0.8 Nm-Torque 1.5 Nm-Torque 1020 STEEL 75 300 70 250 65 200 60 Strain Strain 80 55 50 100 45 50 40 0 a 150 20 40 60 80 100 Angle 0 b 0 Angle 50 100 Figure 3: Strain versus orientation angle (a) and effect of input speed (b) Deformation versus Angular Orientation Figure 4 shows the plot of deformation as a function of the angle for the different input torques. The deformation is shown to increase with torque as observed for the stress and strain. For each torque, the deformation increases continuously with an increasing angle to the maximum value at the same angle of 30o, it then falls continuously with the increasing angle to 90o. 1020 Steel: 0.4 Nm -Torque 0.5 1.6 Deformation, mm 0.4 Deformation 0.4 Nm-Torque 0.8 Nm-Torque 1.5 Nm-Torque 1020 STEEL 0.3 0.2 0.1 1.2 0.8 0.4 0 0 a 50 100 0 Angle b 0 50 Angle 100 Figure 4: Deformation versus orientation angle between shafts at different speeds Conclusions Experiments and simulations have been used to conduct a mechanical analysis of a 3-pin gearless transmission mechanism to investigate the effect of the input torque and the angle between the input and output shafts on the stress, strain, and deformation developed in the pin material. The following observations were made: 1. The stress, strain and deformation developed the pin material increase with increasing input torque 2. Stress decreases with increasing angle to a minimum at an angle of 30o for all the torques, fluctuates from 30-60o then increases continuously to 90o. 3. Strain pattern is similar to that of the stress but fluctuates between alternate angles from 30-90o. 4. Deformation increases with increasing angle to the angle of 30o then decreases with increasing angle to 90o. References 1. Y. khan, S. Raihan, P. Pankil, P. Hiren, D. Patel, “A review paper on design and analysis of gearless transmission mechanism using elbow mechanism” International Journal of Advanced Mechanical Engineering, Volume 7, Number 1 (2017), pp. 31-40 2. R. Somraj, B. Sailesh, “Design and fabrication of Gearless Power Transmission for Skew Shafts”, International Research Journal of Engineering and Technology (IRJET), Volume: 04 Issue: 04 | Apr -2017 3. N. Patil, Jayesh Gaikwad, Mayur Patil, Chandrakant Sonawane, Shital Patel, “Gearless Transmission Mechanism and its Applications” International Journal of Innovative Research in Science, Engineering and Technology, Vol. 6, Issue 3, March 2017 4. A. Kumar, Puneet Pawar, Sagar Rana, Shishir Bist, “Multi-Angular Gearless Drive” International Journal of Scientific & Engineering Research, Volume 6, Issue 7, July-2015 5. S. Nehal Pramesh, Patel Harshil K, Singh Montu, Rajwani Avesh, “DESIGN AND ANALYSIS OF GEARLESS TRANSMISSION THROUGH ELBOW MECHANISM” International Journal of Scientific Research in Engineering (IJSRE) Vol. 1 (3), March 2017 6. S. Pratap Singh Yadav, Sandeep G M, Rudra Naik, G C Keerthi Prakash, Gaurav Kulkarni, Hemanth Kumar S, Thalanki G Vamsi Krishna, “Design, Analysis and Fabrication of Gearless Power Transmission by using Elbow Mechanism” International Journal of Engineering Research & Technology (IJERT) Vol. 6 Issue 04, April-2017 7. B. N. Bardiya, T. karthik, L Bhaskara Rao “Analysis and Simulation of Gearless Transmission Mechanism", International Journal Of Core Engineering & Management (IJCEM) ,Volume 1, Issue 6, September 2014, Page.no: 136-142. 8. A. Kumar and Mukesh Kumar, “Gearless Power Transmission for Skew Shafts (A SRRS Mechanism) ”International Journal of Advanced Science and Technology Vol.79 (2015), pp.61-72 9. G.S. Jagushte, Kudalkar Hrishikesh, Patil Vikas, Varak Vishal, “Design, Analysis and Fabrication of Gearless Transmission by Elbow Mechanism”IJSRD - International Journal for Scientific Research & Development| Vol. 4, Issue 02, 2016 10. M. Tanodi, “Gearless power transmission-offset parallel shaft coupling", International Journal of engineering Research and Technology (IJERT), volume 3, Issue 3, March 2014, Page.no.129-132 11. M. Tanodi, S. B. Yapalaparvi, Anand C. Mattikalli, D. N. Inamdar, “Gearless Power Transmission- L Pin Coupling” International Journal of Ethics in Engineering & Management Education Volume 1, Issue 5, May2014 12. P. Nikam, Atish Lahu Patil, Vinay Prabhakar Jadhav, Sagar Padmakar Patil, Roshan Suresh Shelar, ” Gearless Mechanism in Right Angle” International Journal on Recent and Innovation Trends in Computing and Communication Volume: 4 Issue: 4 13. M. Lokesh, R. Ranjith Kumar, R. Revanth, K. Renugadevi and S. Ramesh, “Gearless Power Transmission Mechanism using 6 Elbow Rods” International Advanced Research Journal in Science, Engineering and Technology Vol. 4, Issue 6, June 2017 14. A. Kumar and S. Das, “An arrangement for power transmission between co-axial shafts of different diameter”, International Journal of Engineering Research and Technology (IJERT), ISSN: 2278-0181, Volume 2, Issue 2, March 2013, Page .no: 338-347. 15. United States Patent, Patent No. US 6,287,206 B1, “Limited Angle Universal Joint”, Inventor: Jack W. Stage, 100 Mt. Lyell Dr., San Rafael, CA (US) 94903 16. United States Patent, Patent No. 2938415, Pin And Slot “Angle-Drive Wrench” Inventor: Charles Kostka, 4 Dock St., Mount Vernon, Bronx, N.Y.