Robotics Kinematics: Spatial Descriptions & Transformations
advertisement

FACULTY OF ELECTRICAL ENGINEERING & TECHNOLOGY
UNIVERSITI MALAYSIA PERLIS
EMJ37303 ROBOTIC SYSTEMS
KINEMATICS (PART I)
“SPATIAL DESCRIPTIONS AND TRANSFORMATIONS”
EMJ37303 ROBOTIC SYSTEMS
Introduction
2
EMJ37303 ROBOTIC SYSTEMS
Introduction
3
EMJ37303 ROBOTIC SYSTEMS
Kinematics Problem
(𝑥, 𝑦, 𝑧)
• How to make sure the robot can
follows required trajectory path?
• What are the angles needed to
be set to obtain the required
position?
4
EMJ37303 ROBOTIC SYSTEMS
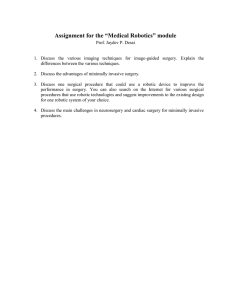
Reference Frames
𝚺𝐞
• Σ𝑤 : World reference frame
• Σ𝑒 : End-effector reference frame
• Σ𝑐 : Cylinder reference frame
• Σ𝑏 : Box reference frame
𝚺𝐛
𝚺𝐰
𝚺𝐜
All joints and object can be described by the position and orientation
with the aid of reference frames.
5
EMJ37303 ROBOTIC SYSTEMS
Coordinate Systems
Left Handed
Right Handed
𝑧
𝑧
𝑦
𝑥
𝑦
𝑥
6
Forward Kinematics
EMJ37303 ROBOTIC SYSTEMS
Robot Kinematics
VS
Inverse Kinematics
What the differences between both approaches?
How to solve both?
Which one should be used?
7
(𝒙, 𝒚)
𝜽2
Forward Kinematics:
EMJ37303 ROBOTIC SYSTEMS
Forward Kinematics VS Inverse Kinematics
To determine the end-effector
position based on joint’s angle
(𝜽1 , 𝜽2 )
𝒀
𝜽1
Forward
Kinematics
(𝒙, 𝒚)
Inverse Kinematics:
𝑿
To determine the joint’s angle
based on end-effector position
(𝒙, 𝒚)
Inverse
Kinematics
(𝜽1 , 𝜽2 )
8
• Vector representation
EMJ37303 ROBOTIC SYSTEMS
Vector Calculus
• Transpose
• Magnitude
9
EMJ37303 ROBOTIC SYSTEMS
Locating Object
How to locate an object?
• Position
𝑧
P
𝐴
𝑷BORG
𝑦
𝑎𝑥
𝑃 = 𝑏𝑦 = 𝑎𝑥 𝑏𝑦
𝑐𝑧
𝑎𝑥
𝐴
𝑷BORG = 𝑏𝑦 = 𝑎𝑥
𝑐𝑧
𝑐𝑧
𝑏𝑦
𝑇
𝑐𝑧
𝑇
𝑥
10
EMJ37303 ROBOTIC SYSTEMS
Locating Object
How to locate an object?
• Position
• Orientation
P
𝒙𝐵 ∙ 𝒙𝐴
𝐴
𝒙 𝐵 ∙ 𝒚𝐴
𝐵𝑅 =
𝒙𝐵 ∙ 𝒛𝐴
{B}
𝐴
𝑷BORG
𝒙𝐴
𝜃
𝑍መ𝐵
𝒙𝐵
𝒚𝐵 ∙ 𝒙𝐴
𝒚𝐵 ∙ 𝒚𝐴
𝒚𝐵 ∙ 𝒛𝐴
𝒛𝐵 ∙ 𝒙𝐴
𝒛𝐵 ∙ 𝒚𝐴
𝒛𝐵 ∙ 𝒛𝐴
Dot Product
𝒙𝐴 ∙ 𝒙𝐵 = 𝒙𝐴 𝒙𝑩 cos (𝜃)
Since the magnitude of unit vector is 1, then
𝒙𝐴 ∙ 𝒙𝐵 = cos (𝜃)
11
EMJ37303 ROBOTIC SYSTEMS
Locating Object (General)
𝐴
𝐵
P
𝐴
𝑷
𝐴
𝐵
𝑷
𝑷BORG = 𝑋𝐵𝑂𝐴
𝑷 = 𝑋𝐵
𝑌𝐵
𝒙𝐵 ∙ 𝒙𝐴
𝐴
𝒙 𝐵 ∙ 𝒚𝐴
𝐵𝑅 =
𝒙𝐵 ∙ 𝒛𝐴
𝑌𝐵𝑂𝐴
𝑍𝐵
𝐶𝐵𝑂𝐴
𝑇
𝑇
𝒚𝐵 ∙ 𝒙𝐴
𝒚𝐵 ∙ 𝒚𝐴
𝒚𝐵 ∙ 𝒛𝐴
𝒛𝐵 ∙ 𝒙𝐴
𝒛𝐵 ∙ 𝒚𝐴
𝒛𝐵 ∙ 𝒛𝐴
𝑷BORG
General Form:
𝐴
𝑷 = 𝐵𝐴𝑅 𝐵𝑷 + 𝐴𝑷BORG
𝒙𝐵 ∙ 𝒙𝐴
𝑋𝐴
𝑌𝐴 = 𝒙𝐵 ∙ 𝒚𝐴
𝒙𝐵 ∙ 𝒛𝐴
𝑍𝐴
𝒚𝐵 ∙ 𝒙𝐴
𝒚𝐵 ∙ 𝒚𝐴
𝒚𝐵 ∙ 𝒛𝐴
𝒛𝐵 ∙ 𝒙𝐴
𝒛𝐵 ∙ 𝒚𝐴
𝒛𝐵 ∙ 𝒛𝐴
𝑋𝐵𝑂𝐴
𝑋𝐵
𝑌𝐵 + 𝑌𝐵𝑂𝐴
𝑍𝐵
𝑍𝐵𝑂𝐴
12
EMJ37303 ROBOTIC SYSTEMS
Locating Object (General)
𝐴
General Form:
Conceptual Form:
𝑷 = 𝐵𝐴𝑅 𝐵𝑷 + 𝐴𝑷BORG
𝐴
𝑷 = 𝐵𝐴𝑇 𝐵𝑷
𝐴
𝐴
𝑷 =
𝐵𝑅
1
0 0 0
𝒙𝐵 ∙ 𝒙𝐴
𝑋𝐴
𝒙 ∙𝒚
𝑌𝐴
= 𝐵 𝐴
𝑍𝐴
𝒙𝐵 ∙ 𝒛𝐴
1
0
𝒚𝐵 ∙ 𝒙𝐴
𝒚𝐵 ∙ 𝒚𝐴
𝒚𝐵 ∙ 𝒛𝐴
0
𝐴
𝑷BORG
1
𝒛𝐵 ∙ 𝒙𝐴
𝒛𝐵 ∙ 𝒚𝐴
𝒛𝐵 ∙ 𝒛𝐴
0
𝐵
𝑷
1
𝑋𝐵𝑂𝐴
𝑌𝐵𝑂𝐴
𝑍𝐵𝑂𝐴
1
𝑋𝐵
𝑌𝐵
𝑍𝐵
1
Homogenous Transformation Matrix
𝐴
𝐵𝑻
Homogeneous Transformation Matrix can describe both orientation and
position by a single square matrix. Why?
• It is much easier to calculate the inverse of square matrices.
• To multiply two matrices, their dimensions must match.
13
EMJ37303 ROBOTIC SYSTEMS
Transformation
• Fixed frame:
Fixed or reference frame is
referring to a frame that
usually used as global
reference frame. The frame
is static and fixed.
• Moving frame
Moving or current frame is
referring to the frame that is
currently moving or
operated
Moving Frame
𝑧𝐵
𝑦𝐵
𝑧𝐴
𝐴
𝑷𝐵𝑂𝑅𝐺
𝑦𝐴
𝑥𝐵
𝑥𝐴
Fixed Frame
14
EMJ37303 ROBOTIC SYSTEMS
Pure Translation and Rotation
Assume that initial position and orientation of frame B is similar to frame A
Pure Translation:
𝐴
𝑃 = 𝐵𝑃 + 𝐴𝑃𝐵𝑂𝑅𝐺
Pure Rotation:
𝑧𝐴
𝐴
𝑃 = 𝐵𝐴𝑅 𝐵𝑃
𝑧𝐴
𝑧𝐵
𝑧𝐵
𝑦𝐵
𝑦𝐴
𝑦𝐴
𝑥𝐴
𝑦𝐵
𝑥𝐵
1
0
𝐴
𝐵𝑻 =
0
0
0
1
0
0
0 𝑋𝐵𝑂𝐴
0 𝑌𝐵𝑂𝐴
1 𝑍𝐵𝑂𝐴
0
1
𝑥𝐴
𝑥𝐵
𝒙𝐵 ∙ 𝒙𝐴
𝒙 𝐵 ∙ 𝒚𝐴
𝐴
𝐵𝑻 =
𝒙𝐵 ∙ 𝒛𝐴
0
𝒚𝐵 ∙ 𝒙𝐴
𝒚𝐵 ∙ 𝒚𝐴
𝒚𝐵 ∙ 𝒛𝐴
0
𝒛𝐵 ∙ 𝒙𝐴
𝒛𝐵 ∙ 𝒚𝐴
𝒛𝐵 ∙ 𝒛𝐴
0
0
0
0
1
15
No rotation, so this part is
equal to Identity Matrix
EMJ37303 ROBOTIC SYSTEMS
Pure Translation
Represents the frame before translation
This column represents the translation
16
EMJ37303 ROBOTIC SYSTEMS
Pure Rotation
𝑅11
𝑅
𝑇 = 21
𝑅31
0
𝑅12
𝑅22
𝑅32
0
𝑅13
𝑅23
𝑅33
0
0
0
0
1
17
𝒙𝐵 ∙ 𝒙𝐴
𝐴
𝒙 𝐵 ∙ 𝒚𝐴
𝐵𝑅 =
𝒙𝐵 ∙ 𝒛𝐴
𝒚𝐵 ∙ 𝒙𝐴
𝒚𝐵 ∙ 𝒚𝐴
𝒚𝐵 ∙ 𝒛𝐴
𝒛𝐵 ∙ 𝒙𝐴
𝒛𝐵 ∙ 𝒚𝐴
𝒛𝐵 ∙ 𝒛𝐴
Alternative: Solving based on rotation angle
Solve based on current
information of orientation
EMJ37303 ROBOTIC SYSTEMS
Rotation Matrix
Alibi Transformation
Alias Transformation
18
EMJ37303 ROBOTIC SYSTEMS
Rotation Matrix
Rotation about 𝒛-axis: 𝐑𝐨𝐭 𝑧, 𝛾
𝑦
𝑃1 (𝑥1 , 𝑦1 , 𝑧1 )
𝛾
𝑟
𝜃
𝑃0 (𝑥0 , 𝑦0 , 𝑧0 )
𝑥
Try solving the rotation matrix around
𝑥 and 𝑦 axis.
19
• By assuming the rotation around 𝑥-, 𝑦-, and 𝑧-axis as 𝛼, 𝛽
and 𝛾, the respective rotation matrix are:
EMJ37303 ROBOTIC SYSTEMS
Rotation Matrix
20
Relative to Fixed Frame
EMJ37303 ROBOTIC SYSTEMS
Combined Transformations
21
Relative to Fixed Frame
𝑇1 = rot(𝑧, 90°)
𝑇2 = rot(𝑦, 90°)
𝑇 = 𝑇3 𝑇2 𝑇1
EMJ37303 ROBOTIC SYSTEMS
Combined Transformations
𝑇3 = trans(4, −3,7)
22
Relative to Fixed Frame
EMJ37303 ROBOTIC SYSTEMS
Combined Transformations
23
Relative to Fixed Frame
𝑇1 = rot(𝑧, 90°)
𝑇2 = trans(4, −3,7)
𝑇 = 𝑇3 𝑇2 𝑇1
EMJ37303 ROBOTIC SYSTEMS
Combined Transformations
𝑇3 = rot(𝑦, 90°)
24
Relative to Moving Frame
EMJ37303 ROBOTIC SYSTEMS
Combined Transformations
25
Relative to Moving Frame
𝑇1 = rot(𝑎, 90°)
𝑇2 = trans(4, −3,7)
𝑇 = 𝑇1 𝑇2 𝑇3
EMJ37303 ROBOTIC SYSTEMS
Combined Transformations
𝑇3 = rot(𝑜, 90°)
26
Relative to Moving & Fixed Frame
EMJ37303 ROBOTIC SYSTEMS
Combined Transformations
27
Relative to Moving & Fixed Frame
EMJ37303 ROBOTIC SYSTEMS
Combined Transformations
28
Assume for transformation 𝑇1 , 𝑇2 , 𝑇3
• Transformations relative to Fixed Frame
𝑇 = 𝑇3 𝑇2 𝑇1
• Transformations relative to Moving Frame
𝑇 = 𝑇1 𝑇2 𝑇3
EMJ37303 ROBOTIC SYSTEMS
Summary: Combined Transformation
Assume for transformation 𝑇1 , 𝑇2 , 𝑇3 , 𝑇4 . Where,
𝑇1 and 𝑇3 are relative to Fixed Frame, while 𝑇2 and 𝑇4
are relative to Moving Frame.
𝑇 = 𝑇3 𝑇1 𝑇2 𝑇4
29
EMJ37303 ROBOTIC SYSTEMS
Inverse Transformation
𝑧𝐵
𝑧𝐴
𝑦𝐵
𝐵
𝑷𝑨𝑂𝑅𝐺
𝐴
𝑥𝐴
𝑦𝐴
𝐴
𝐵𝑇
𝐴 −1
𝐵𝑇
𝑷𝐵𝑂𝑅𝐺
=
𝐵
𝐴𝑇
=
=
𝐴
𝐴
𝐵𝑅
0
0 0
𝐴 𝑇
𝐵𝑅
0 0
0
𝑥𝐵
𝐵
𝑷BORG
1
𝑷AORG
− 𝐵𝐴𝑅𝑇 𝐴𝑷BORG
1
𝑅 −1 = 𝑅𝑇 , 𝑇 −1 ≠ 𝑇 𝑇
𝐵
𝐴𝑅
30
EMJ37303 ROBOTIC SYSTEMS
Compound Transformations
𝑈
𝐸𝑇
= 𝑈𝑅𝑇 𝐻𝑅𝑇 𝐻𝐸𝑇= 𝑈𝑃𝑇 𝐸𝑃𝑇
𝑅
𝐻𝑇
=?
𝑈 −1 𝑈 𝑅 𝐻 𝐻 −1
𝑈 −1 𝑈 𝑃 𝐻 −1
𝑇
𝑇
𝑇
𝑇
𝑇
=
𝑅
𝑅 𝐻 𝐸
𝐸
𝑅𝑇
𝑃𝑇 𝐸 𝑇 𝐸 𝑇
𝑅
𝐻𝑇
=
𝐴 𝐵 −1
𝐵 𝑇 𝐴𝑇
=I
𝑈 −1 𝑈 𝑃 𝐻 −1
𝑅𝑇
𝑃𝑇 𝐸 𝑇 𝐸 𝑇
31
EMJ37303 ROBOTIC SYSTEMS
Compound Transformations
𝐴
𝑃 = 𝐵𝐴𝑇 𝐵𝑃
𝐵
𝑃
𝐵
𝐴
𝑃=
𝐴
𝑃=
𝐴 𝐵
𝐵𝑇 𝑃
𝐴 𝐵 𝐶
𝐵𝑇 𝐶 𝑇 𝑃
∴ 𝐵𝐴𝑇 𝐵𝐶𝑇 = 𝐴𝐶𝑇
𝐴
𝐶𝑇
=
𝐴 𝐵
𝐵𝑅 𝑷CORG
𝐴 𝐵
𝐵𝑅 𝐶 𝑅
0 0
𝑃 = 𝐵𝐶𝑇 𝐶𝑃
0
+ 𝐴𝑷BORG
1
32
EMJ37303 ROBOTIC SYSTEMS
Compound Transformations
{C}
B
C
T
C
D
T
{B}
{D}
A
B
T
C
E
T
{A}
D
E
T
E
A
T
T CBT CDT DAT = I
A
B
T = CDT DET = CBT −1 ABT −1 EAT −1
C
E
C
B
T BAT EAT
{E}
33
{C}
T = CDT DET EAT ABT
EMJ37303 ROBOTIC SYSTEMS
Compound Transformations
C
B
C
B
T
C
D
T
{B}
{D}
A
B
T
{A}
D
E
T
E
A
T
{E}
T = DET −1 CDT −1 CBT ABT −1
E
A
I = EAT −1 DET −1 CDT −1 CBT ABT −1
34
EMJ37303 ROBOTIC SYSTEMS
Exercise
Exercise 1
Solution:
𝑧𝐵
Position:
𝑦𝐵
𝑧𝐴
𝐴
𝑷𝐵𝑂𝑅𝐺
𝑦𝐴
𝑥𝐵
𝑥𝐴
Frame B is located at 3,4,5 unit from
frame A, with yB axis is parallel to yA
axis. Its xB and zB at 30 deg relative to
xA and zA due to a 30 deg rotation
around yB axis. Describe Frame B with
respect to frame A.
𝐴
𝑷𝐵𝑂𝑅𝐺 = 3 4 5
Orientation:
cos 30°
𝐴
𝐵𝑅 = cos 90°
cos 120°
𝑇
cos 90°
cos 0°
cos 90°
cos 60°
cos 90°
cos 30°
Thus, frame B can be described with
respect to frame A by
√3
2
𝐴
𝐵𝑇
= 0
−12
0
0
1
0
0
1
2
0
√3
2
0
3
4
5
1
35
EMJ37303 ROBOTIC SYSTEMS
Transformation: Summary
{B}
Description of a frame
A
A
BR
T
=
B
0 0 0
{A}
A
PBORG
{B}
B
{A} A P
A
P
PBORG
A
PBORG
1
Transform Mapping
A
P = ABT B P
A P BA R
=
1 0 0 0
A
PBORG B P
1 1
Transform Operator
A
{A} A P
2
Q
A
P1
P2 = T A P2
1
A P2 0
= 0
1
0
0 0 qx
1 0 q y A P1
0 1 qz 1
0 0 1
A
P2 = A P2 + Q
(vector operation)
36