Prepared by Professor Eliathamby Ambikairajah, Head of
School
Electrical Engineering and Telecommunications
University of New South Wales (UNSW), Australia
Modified and Delivered by Dr. T. Thiruvaran
Chapter 3
Chapter 3: Discrete-Time Systems ................................................... 49
3.1 Introduction........................................................................... 49
3.2 Block Diagram Representation............................................. 49
3.2.1 An adder .......................................................................... 50
3.2.2 A constant multiplier....................................................... 50
3.2.3 A Unit Delay Element ..................................................... 51
3.3 Difference Equations ............................................................ 52
3.4 Classification of Discrete-Time Systems ............................. 56
3.4.1 Static systems .................................................................. 56
3.4.2 Time-invariant systems ................................................... 57
3.4.3 Linear Systems ................................................................ 58
3.4.4 Causal systems ................................................................ 59
3.4.5 Stable Systems ................................................................ 60
3.5 Linear Time-Invariant Discrete (LTD) Systems ................... 62
3.5.1 Transformation of Discrete-Time signals ....................... 62
3.5.2 The impulse Response of a LTI system .......................... 65
3.5.3 Finite Impulse Response (FIR) System .......................... 68
3.5.4 Infinite Impulse response (IIR) system .......................... 69
3.5.5 Convolution .................................................................... 73
3.6 Stability of Linear Time-Invariant Systems ......................... 79
3.7 Summary ............................................................................... 81
Chapter 3
48
Chapter 3: Discrete-Time Systems
3.1 Introduction
A discrete-time system is a device or algorithm that operates on a
discrete-time signal called the input or excitation according to
some well defined rule, to produce another discrete-time signal
called the output or response.
We say that the input signal x[n] is transformed by the system into
a signal y[n], and express the general relationship between x[n]
and y[n] as
yn H xn
(3.1)
where the symbol H denotes the transformation or processing
performed by the system on x[n] to produce y[n] (see Figure 3.1).
x[n]
x[n]
y[n]
H
H
y[n]
Figure 3.1: Block diagram representation of a discrete-time system
3.2 Block Diagram Representation
In order to introduce a block diagram representation of discretetime systems, we need to define some basic blocks that can be
interconnected to form complex systems.
Chapter 3
49
An adder
3.2.1
A system that performs the addition of two signal sequences to
form another sequence, which we denote as y[n].
Note: It is not necessary to store either one of the sequences in
order to perform the addition. In other words, the addition
operation is memoryless.
x1[0] x1[2]
sequence
x1[n] = {4, 5, -3}
at n=0 n=2
x1[n]
y[n] = x1[n]+x2[n]
+
y[0]
x2[n]
x2[n] = {-2, 4, 3}
n=0
y[2]
y[n] = {2, 9, 0}
n=2
n=0 n=1 n=2
Figure 3.2: Block diagram representation of an adder, x1[n] and x2[n] denote
discrete-time input signals and y[n] denote a discrete-time output signals.
3.2.2
A constant multiplier
This operation simply represents applying a scale factor on the
input x[n]. Note that this operation is also memoryless.
multiplier
x[n]
a
y[n] = ax[n]
Figure 3.3: Block diagram representation of a multiplier. x[n] and y[n] denote
discrete-time input and output signals respectively. ‘a’ denotes a scalar multiplier.
Chapter 3
50
Example:
sequence
x[n] = {2, -5, 6, 8}; a = 0.1; y[n] ={0.2, -0.5, 0.6, 0.8}
n=0 n=3
3.2.3
n=0
n=3
A Unit Delay Element
The unit delay is a special system that simply delays the signal
passing through it by one sample.
If the input signal is x[n], the output is x[n-1]. In fact, the sample
x[n-1] is stored in memory at time n-1 and it is recalled from
memory at time n to form y[n] = x[n-1].
Thus this basic building block requires memory. We use the
symbol T or z-1 to denote the unit of delay.
x[n]
y[n] = x[n-1]
T
Figure 3.4: Block diagram representation of a unit delay.T denotes the sampling
period.
Example:
unit delay
y[n] = x[n-1]
x[n]
Z-1
n= -1; n=0; n=1
x[n] = {0, 1, 0, 5, 7, -2, -1, 0}
y[n] =
{0, 1, 0, 5, 7 , -2, -1}
y[0] y[1] y[2] … y[6]
{ y[n] = x[n-1]; y[0]=x[0-1]=x[-1]; y[1] = x[1-1]=x[0];…}
Chapter 3
51
Note: Normally a combination of adders, multipliers and unit
delays form a complex discrete-time system.
3.3 Difference Equations
A discrete-time system consisting of combinations of adders,
multipliers and unit delays can always be described by a set of
difference equations. The equations would be ordinary algebraic
equations if no delays were present.
Examples:
(a) y[n] = x[n-2]
x[n-1]
x[n]
T
T
y[n] = x[n-2]
T
- Unit sample delay
sampling period
(b)
y[n]
1
1
1
x[n] x[n 1] x[n 2]
2
4
4
x[n-1]
x[n]
T
0.5
T
0.25
0.5 x[n]
Chapter 3
x[n-2]
0.25
+
52
y[n]
(c) yn xn 0.25 yn 1
x[n]
y[n]
+
0.25
T
y[n-1]
4
(d) y[ n] x[n k ] x[n] x[n 1] x[ n 2] x[ n 3] x[n 4]
k 0
Example
yn a0 xn a1 xn 1 b1 y[n 1]
Draw a system implementation for the above difference equation.
a0
x[n]
+
v[n]
y[n]
+
T
T
a1
System 1
-b1
Feedforward Part
Feedback Part
System 2
Directthe
Formabove
I structure
WeFigure
can3.5:
write
difference equation as a set of two
equations
vn a0 xn a1 xn 1
yn vn b1 yn 1
Chapter 3
53
- system 1
- system 2
x[n]
v[n]
System 1
System 2
y[n]
Cascade
structure
x[n]
p[n]
System 2
System 1
y[n]
Figure 3.6: Two systems forming a cascade structure can be interchanged
without affecting the final output signal.
Without changing the input-output relationship, we can reverse
the ordering of the two systems in the cascade representation.
a0
x[n]
p[n]
y[n]
+ for two delay operations; they can be+combined
There is no need
into a single delayp[n-1]
as shown
delay operations
T in Figure 3.8. Since
T p[n-1]
are implemented with memory in a computer, the implementation
-b1
a1
System 2
Feedback Part
Feedforward Part
System 1
Figure 3.8: Direct Form II structure
x[n]
p[n]
+
a0
+
T
-b1
p[n-1]
Figure 3.8: Canonic form.
Chapter 3
54
a1
y[n]
of Figure 3.8 would require less memory compared to the
implementation of Figure 3.8.
It can be proven that both block diagrams Figure 3.5 and Figure
3.8/Figure 3.8 represent the same difference equation.
Proof:
yn a0 xn a1 xn 1 b1 yn 1
(3.2)
From Figure 3.8:
pn xn b1 pn 1
(3.2.a)
yn a0 pn a1 pn 1
(3.2.b)
Substituting n → n-1 in equation (3.2.b),
yn 1 a0 pn 1 a1 pn 2
(3.2.c)
Multiplying equation (3.2.c) by b1,
b1 yn 1 a0 b1 pn 1 a1b1 pn 2
(3.2.d)
Adding equation (3.2.b) and (3.2.d),
yn b1 yn 1 a0 pn a0b1 pn 1 a1 pn 1 a1b1 pn 2
a0 x n
a1x n1
Therefore,
yn a0 xn a1 xn 1 b1 yn 1
as in equation (3.2)
Exercise:
Given a system as shown below, write the difference equation.
Chapter 3
55
y[n]
x[n]
T
T
3.4 Classification of Discrete-Time Systems
In the analysis as well as in the design of systems, it is desirable
to classify the systems according to the general properties that
they satisfy. For a system to possess a given property, the property
must hold for every possible input signal to the system. If a
property holds for some input signals but for others, the system
does not possess the property.
General Categories are:
Static systems
Time - invariant systems
Linear systems
Causal systems
Stable systems
3.4.1
Static systems
A discrete-time system is called static or memoryless if its output
at any instant ‘n’ depends at most on the input sample at the same
time, but not on past or future samples of the input.
Example:
Chapter 3
56
yn axn
yn nxn bx 3 n
Both are static or memoryless.
On the other hand, the systems described by the following inputoutput relations, such as
yn xn 3xn 1
N
yn xn k
k 0
are dynamic systems or system with memory.
3.4.2
Time-invariant systems
A time-invariant system is defined as follows:
H
xn n0
yn n0
where y[n] = H{x[n]}.
Specifically, a system is time invariant if a time shift in the input
signal results in an identical time shift in the output signal.
Example: Determine if the system is time variant or time
invariant.
yn H xn nxn
Chapter 3
57
(3.3)
The response of this system to x[n-k] is
wn nxn k
Now if we delay y[n] in (3.3) by k units in time, we obtain
yn k n k xn k
nxn k kxn k
This system is time variant, since
yn k wn
3.4.3
Linear Systems
A linear system is defined as follows:
H
a1 x1 n a2 x2 n
a1 y1 n a2 y2 n
where a1 and a2 are arbitrary constants.
Chapter 3
58
(3.4)
Example: Three sample averager
yn
1
xn 1 xn xn 1 H xn
3
H
xn
yn
1
H {ax1 n bx2 n} {ax1 n 1 bx2 n 1
3
ax1 n bx2 n
ax1 n 1 bx2 n 1}
[ay1 n by2 n]
The 3-sample averager is a linear system.
Example:
yn H xn x 2 n
H ax1 n bx2 n ax1 n bx2 n
2
a 2 x12 n b 2 x22 n 2abx1 nx2 n
2
2
which is not equal to ax1 n bx2 n. This system is nonlinear.
Example:
yn nxn H xn
H ax1 n bx2 n anx1 n bnx2 n
ay1 n by2 n
The system is linear.
3.4.4
Causal systems
A system is said to be causal if the output of the system at any
time ‘n’ depends only on present and past inputs, but does not
depend on future inputs. If a system does not satisfy this
definition, it is called noncausal. Such a system has an output
Chapter 3
59
that depends not only on present and past inputs but also on future
inputs.
Example:
yn xn xn 1 Causal
yn axn
Causal
yn x n
Noncausal
yn xn 3xn 4 Noncausal
{Let n = -1 y[-1]= x [1], the output at n = -1 depends on the
input at n = 1.}
Discrete - time sequence is called causal if it has zero values for
n<0.
y[n]
Causal
& Stable
n
Figure 3.9: An example of causal discrete-time sequence.
3.4.5
Stable Systems
A discrete signal x[n] is bounded if there exists a finite M such
that |x[n]| < M for all n.
A discrete-time system in Bounded Input-Bounded Output
(BIBO) stable if every bounded input sequence x[n] produced
a bounded output sequence.
If xnmax A, then ynmax B
Chapter 3
60
Example:
The discrete-time system
yn nyn 1 xn, n 0
is at rest [i.e. y[-1]=0]. Check if the system is BIBO stable.
If x[n]=u[n], then |x[n]| 1. But for this bounded input, the output
is
n 0 y0 x0 1
n 1 y1 1 y0 x1 2
n 2 y2 2 y1 x2 5
which is unbounded. Hence the system is unstable.
y[0]=1 y[1]=2 y[2]=5 increasing
Exercise:
A discrete-time system can be (1) Static or Dynamic, (2) Linear
or nonlinear, (3) Time invariant or time varying, (4) Causal or
noncausal, (5) Stable or unstable
Examine the following system with respect to the properties
above.
(a)
y[n] e a x[ n ]
(b)
y (n) x(n) nx(n 1)
Chapter 3
61
3.5 Linear Time-Invariant Discrete (LTD) Systems
Transformation of Discrete-Time signals
3.5.1
A discrete-time signal, x[n] may be shifted in time (delayed or
advanced) by replacing the variables n with n-k where k > 0 is an
integer
x[n-k] => x[n] is delayed by k samples
x[n+k] => x[n] is advanced by k samples
For example consider a shifted version of the unit impulse
function (see Figure 3.10). If we multiply an arbitrary signal x[n]
by this function, we obtain a signal that is zero everywhere,
except at n = k.
yn xn n k xk n k
[n-k]
(3.5)
x[n]
1
1
n
n
0 1 2 k-1 k k+1
0 1
2 k-1 k k+1
y[n]
1
n
0 1 2 k-1k k+1
Figure 3.10: Multiplying a discrete-time signal, x[n], with a shifted unit impulse
function, [n-k], produces a discrete-time signal whose sample is zero except at n=k.
Chapter 3
62
An arbitrary sequence can then be expressed as a sum of scaled
and delayed unit impulses.
p[n]
a4
a3
a1
1
-3
-2
-1 0
1 2 3 4 5
a2
6 7
a7
n
p[n] = a-3[n+3] + a1[n-1] + a2[n-2] + a4[n-4]+ a7[n-7]
Figure 3.11: An example of expressing arbitrary discrete-time sequences
as a sum of scaled and delayed unit impulses.
More generally, the discrete-time sequence can be expressed
according to
xn
xk n k
(3.6)
k
For real time signals
xn xk n k
k 0
and for a real-time signal with a finite number of samples N.
N 1
xn xk n k
k 0
Chapter 3
63
(3.7)
If x[n] has finite duration, the infinite sum in equation (3.7) may
be replaced by a finite sum. That is if x[n] 0 for –N2 n N1.
N1
xn
xk n k
k N2
x[n]
N2
0
N1
n
Figure 3.12: An example of finite duration discrete-time sequences.
Equation (3.7) is a special form of convolution. Generally, the
convolution of two sequences x[n] and y[n] is defined as
xn* yn
xk yn k
k
convolution
xn k yk
k
Note that, convolution is commutative :
i.e. x[n] * y[n] = y[n] * x[n]
Chapter 3
64
(3.8)
3.5.2
The impulse Response of a LTI system
For example consider the discrete-time system, H, shown in
Figure 3.13.
x[n]
System H
T
b
a
v[n]
+
+
c
T
y[n]
Figure 3.13: An example of discrete-time system, whose input and output are
represented by x[n] and y[n], respectively.
Difference equation for the system H:
vn axn bxn 1 yn
yn cvn 1
(3.9)
From the above difference equations, y[n] can be determined for
a given input.
Let x[n] = [n]
Unit impulse
Assume v[n] = 0 for n 0 y[n] is also initially zero for n 0.
Substituting n = 0,1,2,... in equation (3.9), we obtain
n=0
Chapter 3
v[0]=ax[0]+bx[-1]+y[0]=a1+b0+0=a
y[1] = ac
65
n=1
v[1] = ax[1] + bx[0] + y[1] = a0 + b1+ ac= b+ac
y[2] = cv[1] = c(b+ac)
n=2
v[2] = ax[2] + bx[1] + y[2] = 0 + 0 + c(b+ac)
y[3] = cv[2] = c2(b+ac)
...
n = n – 1 v[n-1] = bcn-2 + acn-1
y[n] = c v[n-1] = bcn-1 + acn
yn xn n hn bcn1u(n 2) acnu(n 1)
Impulse response
The response yn hn to an impulse excitation (x[n] = [n]) is
known as the impulse response and it is a very important
characteristic of a discrete system.
x[n]
H
y[n]
If x[n] = [n], then y[n] = h[n]. The output tells us the system
behaviour as the system is being hit by all input frequencies. h[n]
completely characterizes the system.
We have
[n]
H
h[n]
and since the system is time invariant, the response to [n-k] must
be h[n-k]
[n-k]
Chapter 3
H
66
h[n-k]
Therefore
x[k][n-k]
H
x[k]h[n-k]
Now recall that each x[n] can be written as a weighted sum of
shifted unit impulse (see equation (3.6)). Therefore
x[k ] [n k ] x[k ]h[n k ]
H
k
(3.10)
k
x[n]
x[n] * h[n] (see equation (3.8))
and
H
xn
yn xn* hn
The response to an arbitrary input signal x[n] is the convolution
of x[n] with the impulse response of the system.
System H:
x[n]
H
y[n]
impulse response of the system
yn xn* hn
Chapter 3
67
(3.11)
yn xn * hn
xk hn k
k
yn hn * xn
hk xn k
(3.12)
k
where h[n]=H{[n]}.
Finite Impulse Response (FIR) System
3.5.3
If the impulse response of a LTI system is of finite duration, the
system is said to be Finite Impulse Response (FIR).
x[n] = [n]
x[n] = [n]
2
T
x[n]
-1/2
2
0 1
Input
2
n
y[n]
+
Non-recursive system
n
Impulse Response
Figure 3.14: An example of LTI systems with finite impulse response.
x[n] = [n] y[n] = 2x[n] - 0.5x[n-1]
n=0
n=1
n=2
y[0] = h[0] = 2x[0] – 0.5x[-1] = 2
y[1] = h[1] = 2x[1] – 0.5x[0] = -0.5
y[2] = h[2] = 2x[2] – 0.5x[1] = 0
n=n
Chapter 3
0
68
3.5.4
Infinite Impulse response (IIR) system
If the impulse response of a linear time-invariant system is of
infinite duration, the system is said to be an Infinite Impulse
Response (IIR) system.
x[n] = [n]
recursive system
v[n]
x[n]
T
+
0 1 2
Input
1
y[n]
n
Figure 3.15: An example of discrete systems with infinite impulse response.
vn xn yn
yn 1.vn 1
If x[n] = [n], calculate h[n] for n=0,1,2,...
Example:
Find the impulse response h[n] of the following first-order
recursive system.
n0
ayn 1 xn
yn
0
otherwise
To find h[n], we let x[n] = [n] and apply the zero initial condition.
Chapter 3
69
n = 0, y[0] = h[0] = ay[-1] + [0] = 1
n = 1, y[1] = h[1] = ay[0] + [1] = a
n = 2, y[2] = h[2] = ay[1] + [2] = a2
n = n, y[n] = h[n] = an for n 0
y[n] = h[n] = 0 for n < 0, because [n] is zero for n < 0 and
1]= 0.
y[-
Hence, h[n]=anu[n] for all n
h[n]
h[n]
0<a<1
1
a>1
1
0
x[n]
h[n]=anu[n]
0
n
y[n]
n
x[n]
y[n]
+
y[n] = x[n] * h[n]
a
T
Example:
Find the impulse response h[n] of the following fourth order nonrecursive system.
yn a0 n a1 xn 1 a 2 xn 2 a3 xn 3 a 4 xn 4
Chapter 3
70
To find h[n], we let x[n] = [n].
n=0 h[0] = a0[0] + a1[-1] + a2[-2] + a3[-3] + a4[-4] = a0
n=1 h[1] = a0[1] + a1[0] + a2[-1] + a3[-2] + a4[-3] = a1
n=2 h[2] = a0[2] + a1[1] + a2[0] + a3[-1] + a4[-2] = a2
n=3 h[3] = a0[3] + a1[2] + a2[1] + a3[0] + a4[-1] = a3
n=4 h[4] = 0 + 0 + 0 + 0 + a4[0] = a4
n=5 h[5] = 0 + 0 + 0 + 0 + a4[1] = 0
For n 5, h[n] = 0, since the nonzero value of [n] has moved out
of the memory of this system.
[n]
x[n]
T
a0
T
T
a1
T
a2
a3
a4
+
y[n]=h[n]
h[n]
a0
a2
a1
a3
a4
a0, a1, a2, a3 and a4 are called coefficients (+ or -) or constants.
Chapter 3
71
Example:
Two structures are shown below:
(a) Write the difference equation
(b) Calculate the impulse response
x[n]
T
T
1
1
Structure 1
1
y[n]
+
x[n]
T
T
Structure 2
-1
+1
y[n]
+
Structure 1: y[n] = x[n] + x[n-1] + x[n-2]
h[n]=y[n]|x[n] =[n]
h[n] = [n] + [n-1] + [n-2]
h[0]=1; h[1] = 1; h[2] = 1 and h[n] = 0 n 3
Structure 2:
y[n] = x[n]-x[n-2]
h[n] = [n] - [n-2]
h[0]=1; h[1] = 0; h[2] = -1 and h[n] = 0
Chapter 3
72
n3
Exercise:
A difference equation for a particular filter is given by
y(n) = 0.12 x(n) – 0.1 x(n-2) + 0.82 x(n-3) – 0.1 x(n-4) + 0.12 x(n-6)
Find the impulse response of the above filter
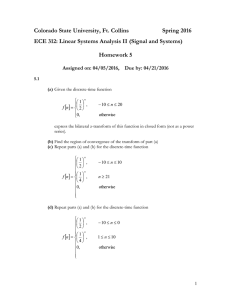
Convolution
3.5.5
yn xn * hn
xk hn k
k
yn hn* xn
hk xn k
k
Commutative Law:
xn* hn hn* xn
Associative Law:
xn* h1 n * h2 n xn* h1 n* h2 n
x[n]
x[n]
h1[n]
h2[n]
h1[n]
h2[n]
Chapter 3
y[n]
y[n]
73
x[n]
x[n]
h[n]= h1[n]*h2[n]
h2[n]
h1[n]
y[n]
y[n]
Distributive Law:
xn* h1 n h2 n xn* h1 n xn* h2 n
h1[n]
y[n]
y[n]
x[n]
+
x[n]
h[n]= h1[n]+ h2[n]
h2[n]
Graphical computation of convolution
The convolution of two signals x[n] and h[n] is shown in steps in
the diagram below.
x[n]
h[n]
1
0 1 2 3 4
n
n
h[-i]
1
Step 1: Fold h[i] over in time; this
gives h[-i].
i
Chapter 3
74
Step 2: Shift h[-i] through a
distance n, This gives h[n-i].
We have chosen n=2 in the diagram.
h[2-i]
1
0 1 2 3 4 5
i
x[i]h[2-i]
Step 3:
Multiply x[i] by h[n-i]
1
0 1 2 3 4 5
Step 4:
Sum this product over all i. This gives
the signal value y[2],
y2
y[n]
y[2]
xi h2 i
0 1 2 3 4 5
i
Step 5:
Vary n from - to . This gives y[n].
75
n
y[n]
0 1 2 3 4 5
Chapter 3
i
n
Convolution of Finite Sequence
The convolution of two finite-length sequences is also of finite
length.
Find the convolution of h[n] = [2, 5, 0, 4] and x[n] = [4, 1, 3]; i.e.,
y[n] = x[n] * h[n]. Assume that both sequences start at n=0. The
flipped sequence is h[-i] = [4, 0, 5, 2]. Line up flipped sequence
below x[n] to begin overlap and shift it successively, summing
the product sequence to obtain the discrete convolution
0 shift
1 shift
x[n]:
4 1 3
4 0 5 2
← h[-i]
y[0] = Sum of products = 8
x[n]:
4 1 3
4 0 5 2
← h[1-i]
y[1] = (5x4)+(2x1) = 22
2 shifts
4 1 3
4 0 5 2
y[2] = 0 + 5 + 6 = 11
3 shifts
x[n]:
x[n]:
4 1 3
4 0 5 2 ← h[3-i]
y[3] = 16 + 0 + 15 = 31
← h[2-i]
4 shifts
x[n]:
5 shifts
4
1 3
4 0 5 2 ← h[4-i]
y[4] = 4 + 0 = 4
x[n]:
4
1
3
4 0 5 2 ← h[5-i]
y[5] = 12
y[n] x[n] h[n] [8 22 11 31 4 12]
Note: Length of y[n] = Length of x[n] + Length of h[n] - 1
6
=
3
+
4
-1
Exercise:
Compute the convolution y[n] = x1[n] * x2[n] of the digital
signals given by
x1 n 1,2,1
1, for 0 n 5
x2 n
0, elsewhere
Chapter 3
76
Example:
Determine the impulse response for the cascade of two linear
time-invariant systems having impulse response.
n
n
1
1
h1n un and h2 n un
2
4
x[n]
p[n]
h1[n]
y[n] = p[n] * h2[n] and
p[n]=x[n]*h1[n]
= (x[n] * h1[n]) * h2[n]
using associative law: h1[n]
* h2[n] =h[n]
= x[n] * (h1[n] * h2[n])
x[n]
h k h n k
1
k
k
1
1
uk
4
k 2
1
4
1
hn
2
n n
n
2
nk
k
1 1
un k
k 0 2 4
n
nk
n
1 n1
2
(2 1)
4
k 0
k
1 n
2
2
Note:
for n 0
h[n] = 0 for n < 0
Chapter 3
y[n]
h[n]
hn h1 n* h2 n
y[n]
h2[n]
77
1 r r 2 r n1
1 r n
1 r
hn h2 n* h1 n
h k h n k
k
k
1
1
uk
2
k 4
k
1 1
2
k 0 4
n
nk
2
nk
1
un k
1
2
n n
k
1 1
2
k 0 4
k
n 1
1
1
n
k
n
1 n 1
1
2
1
2 k 0 2
2
1
2
n
n
1 1
2
for
n0
2 2
1 n
2 un
2
h1[n] h2 [n] h2 [n] h1[n]
1
hn
2
n
Exercise:
Determine the response of the (relaxed) system characterised by
the impulse response, h[n], to the input signal, x(n) = 2n u(n)
y[n]
x[n]
Ans: yn 2 2n 1 1
3
Chapter 3
78
2
n 1
un
3.6 Stability of Linear Time-Invariant Systems
An LTD system is stable if, and only if, the stability factor
denoted by S, and defined by
S
| hk |
(3.13)
k
is finite.
Let x[n] be a bounded input sequence {i.e. | x[n]|<M for all n,
where M is a finite number}. We must show that the output is
bounded when S is finite. To this end, we work again with the
convolution formula.
yn
hk xn k
k
If we take the absolute value of both sides of the above equation,
we obtain
| yn |
hk xn k
k
Now, the absolute value of the sum of terms is always less than
or equal to the sum of the absolute values of the terms
| yn |
| hk |
| xn k |
k
Since the input values are bounded, say by M, we have for all n:
| yn | M
| hk |
MS
k
Hence, since both M and S are finite, the output is also bounded.
ie, a LTD system is stable if its impulse response is absolutely
summable.
Chapter 3
79
Example: Check the stability of the first-order recursive system
shown below:
yn ayn 1 xn
The impulse response of this system is:
hn a n un
S
for all formula
| hn |
k
n
|
a
|
k
It is obvious that S is unbounded for |a| 1, since then each term
in the series is 1.
For |a| < 1, we can apply the infinite geometric sum formula, to
find
S
1
1 | a |
for |a| < 1
Since S is finite for |a| < 1, the system is stable.
Exercise:
For the discrete time system given below, check if it is a linear
time-invariant and BIBO stable. Assume y(-1) = 0.
𝑦(𝑛) = 𝑛𝑦(𝑛 − 1) + 𝑥 (𝑛)
𝑛≥0
Chapter 3
80
3.7 Summary
At the end of this chapter, it is expected that you should know:
The definition of a discrete-time system.
Basic blocks of a discrete-time system: the adder, multiplier
and unit delay.
How to draw the block diagram of a discrete-time system given
its difference equation.
How to write the difference equation of a discrete-time system
given its block diagram.
The difference between Direct Forms I and II and Canonical
Form, and how to write a difference equation in all three forms,
showing the equivalence between them.
The definition (showing proofs and/or examples) of the
following types of system:
o Static
o Time Invariant
o Linear
o Causal
o Stable
Interpretation of a discrete time signal as a weighted sum of
delayed impulses.
Definition and understanding of convolution (including hand
and graphical computation of convolution).
The impulse response of a linear, time-invariant system, and
how to calculate it from a difference equation.
The difference between an FIR and an IIR system. In particular,
that the impulse responses of FIR systems have identical values
to the coefficients of the difference equation.
Given the impulse responses of two cascaded systems, be able
to compute the overall impulse response.
Chapter 3
81