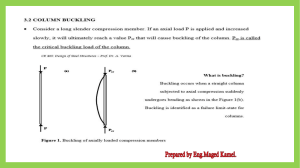
About upheaval and lateral buckling of embedded pipelines K. Peters The problem of upheaval or lateral buckling of pipelines not only occurs naturally for offshore pipelines (due to reduced soil resistance and buoyancy forces), but also for gathering and injection lines of oil and gas production fields (see e.g. Hisham Saadawi [I]). Theories and special purpose calculation programs for offshore lines have been developed by Palmer et al 12, 31 and Klever et ai [4] respectively. Palmer et al's theorv assumes elasticallv ore-deformed oioelines and is desianed to explicitly take advantage from this assumption which kidequate for offshok lines. For onshore Ifnes,d rectlonal changes (atera and also vertical, are otren acn eved by manufacued oenos or f~eldoends An alternatwe aDDroacn s therefore developeo .. suitable to handle the rougher onshore profiles. Chapter 1: Theories based on the local equilibrium of forces perpendicular to the pipe axis are discussed, especially the theory of Palmer et al. Problems concerning the general applicability already indicated by Palmer himself (see [2,3]) are reviewed. Chapter 2: Within this chapter, the alternative approach is developed. The special feature is that the theory allows for a local lack of soil resistance leading to a controlled elastic deformation. A simplified heuristic model is presented with the intention to clearly demonstrate that the theory is of second order, and that piping programs not able to produce second order solutions may not be used in solving Upheaval or Lateral Buckling problems. Chapter 3: Criteria are derived for either aiiowabie deflection angles on a (Euier) buckling length in case of given soil resistances or for the required soil resistances in case of given deflection angles on a buckling length. These criteria can be used for profile design or control purposes. An essential advantage is that, compared to local equilibrium theories, the necessary knowledge concerning the lateral or vertical trench profile is significantly reduced. Chapter 4: A typical gas injection line is chosen to demonstrate an application and to exhibit the quantitative results to be expected. Theories relying on local equilibrium Let an embedded pipeline be described by its D. Outer diameter [m] Dimensions: t Wall thickness [m] I Moment of Inertia [ma] Material: E Young's modulus [Nlm*] v Poisson's ratio a Thermal expansion coefficient [1/KJ Load duty: p pressure [N/m] AT Temperature range [K] Soil properties: R Ultimate soil resistance [Nlm] Alignment profile: x Cumulative chainage [m] h(x) Height or lateral profile [m] Due to the temperature and pressure loads, and due to friction between soil and pipe wall a compressive restraining force F, generated for soil fixed pipeline sections: is For curved lines, the restraining force induces a line force q(x) perpendicular to the pipe line axis acting between pipeline and soil. 8 3R international- InternationalEdition 2006 ENGINEERING & CONSTRUCTION For moderately rough alignments (h'(x)<<l) we may assume. Definition: The profile h(x) is called an "Equilibrium Profile of the First Kind" if and only if R 2 Iq(x)l for each choice of x. The well known theory of Palmer et al assumes that the alignment curve is gained by elastic deformation of the pipeline. Elementary beam theory delivers the following condition to establish local equilibrium: Definition: The profile h(x) is called an "equilibrium profile of the Palmer type" if and only if equation (3) is fulfilled for each choice of x. With respect to upheaval buckling and elastic deformation h due to pipeline weight W(x) per unit length, we have the following special situation: d4h El-(x) dx4 = W(x) for almost all x Therefore and in the case of upheaval buckling, Palmer's equilibrium does not introduce a further relief. It is obviously always allowed to take into account the pipeline weight as a resistance against upheaval buckling, also in the case of manufactured overbends. The weight might be considered as a part of soil resistance. Both types of equilibrium are "local" in the sense that for each position x the forces perpendicular to the pipe axis are balanced. Assumina riaid-~lasticsoil resistance behaviour, no DiDeline deformation is needed to achieve eauilibrium. Formallv, no soil resistance is required in the case of a straight line. ~he'ciassicalbuckling problem is therefore not included, and the existence of a lower limit Rmi.> 0 for the soil resistance is essential for the validity of local theories. The real problem is to decide upon the higher differentialsof h(x). Ideas have been developed concerning dimensionless download and dimensionless imperfection length parameters gained for special profile types to characterise an allowed "roughness" of a profile (see 121 and [3]). But it remains difficult to develop or control a profile with the help of these characteristic values. It is sometimes proposed to gain the differentials of h by measurements of the trench sole or pipe top respectively. It is my opinion that this is not a simple task due to the fact that higher order numerical differentiation based on discrete values is an operation of extreme inaccuracy. The inaccuracy demands a smooth interpolation scheme as an intermediate step. The only interpolation of physical significance is cubic spline interpolation hcs which simulates an elastic beam forced into the measured positions by forces P, concentrated at the measured chainage locations. As a consequence of the principle of minimum potential energy, this is the interpolation of minimum integral curvature. et now (x., hJ,.,.., be the measured profile points: .a Especially: X )( , ,h4d dx4 = o for x + xn for all n Therefore, and together with (2) and (3) for a local equilibrium: Equations (2) and (6) show that, for practical purposes and depending on the interpolation scheme, the Palmer Equilibrium can 'develop" into an Equilibrium of the First Kind. The problem is attacked by Palmer et al by considering "typical" deformations. For an Equilibrium Profile of the First Kind or an elastically pre-deformed pipeline in a trench of the Palmer type buckling is obviously excluded and the pipeline is fixed. The loading via F, does not lead to any displacements. On the other hand it is not always practicable to produce First Kind or Palmer equilibrium profiles for significantly loaded onshore pipelines. In general, 3R international - International Edition 2006 9 manufactured or field bends are involved. To deal with this problem is he intention of the theory to be developed. In this sense it is an alternative t o the classical (Palmer) approach which is modelled for offshore pipelines usually laid without using manufactured bends or field bends. An alternative approach to upheaval and lateral buckling The theories as described above rely on the local equilibrium of the forces perpendicular to the pipe axis. This approach is not practicable if narrow bends or even mitre joints are involved. In this case, axial resistance by pipe bending has to be activated. A heuristic model Before startng the mathernat~calappararm, tne mechan sms effect ve in bbi dmg up axial resistance against b ~ c kng l are shown for a simple h e ~st r c mooel. This sim~liteo model s also meant to clear v oemonstrate mat the ap~roachD ~ O D O 1 Ss ~ based ~ on the equilibrium for deformed structur&. Beware that only those piping caiculation programs might be used'to attack upheaval or lateral buckling which are able to produce second order solutions (e.g.14-6)). Fig. 1: Heuristic model of an upheaval or lateral buckling configuration P represents the soil resistance, the rotational spring S the inherent pipe stiffness. By assuming P <, ,F . dh) a potential buckling situation is described. It is presupposed that the spring S is relaxed for the height h (e.g. if q(h) represents a manufactured lateral bend or overbend). TO produce an equilibrium situation, a displacement Dh must necessarily occur. If ~h represents an equilibrium, the principle of virtual work delivers the following condition (8 a virtual displacement): For modestly rough profiles (h<<U2) we may assume in linear approximation: $.+Ah+&) 2 + L~4 j L2 (h+Ah)2+-= 4 4h q(h) = - q(h + Ah) = 4(h+Ah) L L 2(h+ Ah) L q(h+Ah+q)= 4(h+Ah+S) L Therefore (see (8) and (9)): 0 = Frestr The term 4S 4Ah 4(h + Ah) 6---S-PS L L L 45 4Ah 45 might be interpreted as the contribution to equilibrium delivered by an axial resistance - due to the L L L inherentpipe stiffness. For h=O and P d formula (10) reveals that Figure 1. 10 (10) 3R international . InternationalEdltion 2006 4s 1s the Euler buckling force of the system according to L Reformulation of equation (1 0) yields: 4s Here Buckling is excluded fie. Ah is finite and positive) i f the local lack of "soil resistance" P i s limited to a length L < A = Freer h means the buckling length with respect to F,,, This is the type of theorems to be expected also for the more complex situation of an embedded line. The always existing first order solution ser interest). 4Ah 4S 1 . , =, ,F . q(h) - P is obviously not sufficient (see (11)) and only useful for the case C << h (a case of lesL L Embeddedlines The Figure 2 below shows a possible buckling situation for an embedded pipeline. R means the maximum soil resistance (rigid- Fig. 2: Pipeline configurationfor possible upheaval or lateral buckling plastic soil behaviour assumed). As usual,,F is the restraining compressive force. Let r be the bending radius leading to the deflection angle cp which is assumed to be manufactured (e.g. by afield bend). Without loss of generality, we assume x, = 0 and we define: 1 @(x)=-lflxls(pr 3@(x) = 0 otherwise2 - - The limit r 0 represents a mitre joint. For sufficiently small bending radii r the local equilibrium is violated in any case. Therefore, a pipeline deflection f is provoked on a certain length L. On this length, the following differential equation is valid: It is important to recognise the difference between the equations (3) and (13): Equation (3) 0.e. Palmer's equation) asks which soil resistance R is needed for local equilibrium if an elastic deformation h is given. Equation (13)asks for the elastic deformation f ifthe local equilibrium is violated. Due to symmetry, f may be developed into the ~ourier-series: Equation (13) now allows to solve for L and the Fourier-coefficients An (n z 1): ENGINEERING & CONSTRUCTION There are obvious interpretations of the last two equations: Deflection takes place on a length L defined by the global equilibrium b&tweensoil resistance and upheaval (or lateral) force induced by F,, (equation (15)). The Fourier-series converges to limited values for f(x) and f(0) > 0 t e . no elastic buckling) if the i 4'2 buckling length 2., = . 'I Frestr is greater than L (equation(l6)). Especially, equations (15) and (16) include Euler's buckling theory. It might be of some interest to look at the Fourier-coefficientA, for r - 0 to confirm the full analogy between (11) and (17). For r . cq = L all coefficients 4, vanish (see (16)). Together with (15): This is the case of an Equilibrium Profile of the First Kind (local equilibrium). Although there is no equation for the Fourier-coefficient A, the maximum displacement Ah can be evaluated. The maximum bending moment is available as: - 4rr2nz ,A ,, n=1 "'*,I LZ How to use chapter 2 for design and control purposes As discussed above, equation (15) lends itself for the following natural use: with 0 < q c 1 Equations (16) and (20) can be reformulated: I IMJ = E l . r n a x T max n=l \ 12 3R international - Internatiand Edition 2006 ,.-. ENGINEERING & CONSTRUCTION For mitre joints (r stress): - O), equations (21) and (23) deliver the following conservative assessment (om, means the maximum bending Since the equations 3 - have unique solutions 0 r ~$3) r 1 for 0 < % < (i = 1,2), equations (21) and (24) may be used to decide upon an allowable deflection angle q,,,(A) on a buckling length h if the ultimate soil resistance R and the allowable bending stress on,,are given, or to decide upon the required ultimate soil resistance R, observing the bending stress a,, if the deflection angle on a buckling length at the chainage position x is given: :.(-.-I= =1 "=In -11 cos nq oan 'Frem sinq D,.E,R * %,IW) =q - h . ~ F,& Due to the fact that (25) is gained by the conservative assumption that height deflections might be realised also by mitre joints, any reasonable interpolation h, (x) for measured profile data (x., hJ (e.g. cubic spline) is sufficient for the angles &,x) to be available: It is worthwhile to remark the reducedprofile information employed compared to the informationneeded to apply local equilibrium theories. For the validity of (26), it is obviously to be assured that there is a reasonably small distance between measured chainage locations, e.g. about one or two buckling lengths. A realistic example The implications under (25) are especially useful to control the As-Built profiles of embedded pipelines. For onshore lines, the height profile h(x) is usually documented by T(op)O(f)P(ipe) measurements once per spool. As an example, a typical gas injection line as operated in oil fields is chosen: E =2.10flpl/m2] D. = 0,273 [m] t = 0,022 [m] P = 449 [barg] 3R internationa. International Edition 2006 1 13 7 AT ,F A R a,, = = = = = 65 [Kj 3,5 ,, 106 [N] 17.8 [m] 23780 [N/m] for the upward direction 1,s -.1@ [Nlmq T L = Oall . Festr = 0,40348 n=,n 2 - q 2 Da.E.R cp(h,x) 5 cp,ll(h) = 1 = 0,4575 (27) 11.h.R = 0,05533 E 3,17" Frestr As a further application, we might assume that a height deflection ~&,x) of 5" = 0.0873 has been detected at a position x. We then ask for the soil resistance required: T?1_= ,, n -qZ Rrq, = %I .h = 0,56015 3 11 = 0,3173 Da.E.cp(Lx) .dh,x) = 54099 (N/ -r.h Frestr It is obvious that, using an appropriate calculation tool (e.g. PI) able to produce e.g. cubic spline interpolation and to solve for 11, an alignment profile can easily be controlled with respect to e.g. Upheaval Buckling once the table of TOP-height measurements is available (see (26), (28)); or that (27) can be used to develop a profile specification. A concluding remark It is warned once again that first order calculations (although often used to control or specify alignment profiles) are in general Frestr can be observed (local equilibrium, see Nevertheless, no calculation is needed at all if bending radii r Z R equation (18)). This might be a first try to specify a profile design. Elaborated calculations are then restricted to special topological situations using the method according to chapters 2.3, 4 or an appropriate (second order) general or special purpose piping Program @.g. [4l, 151, [6l). not sufficient. References 111 H. Saadawi: 'Upheaval Buckling of Gas Injection Pipelines Onshore Abu Dhabi - A Case Study". 2001 SPE Middle East Oil Show, SPE 68224 I21 A.C. Palmer, C.P. Ellinas. D.M. Richards, J. Guijt: "Design of Submarine Pipelines Against Upheaval Buckling". Proceedings of the 22.d Annual Offshore Technology Conference, 1990 PI A.C. Palmer, R.A.King: "Subsea Pipeline Engineering". PennWell Corporation, Tulsa, Oklahoma, 2004 14) F.J. Kiever, L.C. van Helvoirt. A.C. Sluytemlan: "A Dedicated Finite Element Model for AnalySing Upheaval Buckling Response of Submarine Pipelines". Proceedings of the 2Z1 Annual Offshore Technoloav Conference. 1990 ~~I51 rck Consulting ~ngneerslExpert Design Systems b.v: PLE-micro-CAD [61 Sigma lngenieurgesellschanmbH: RohR [71 Wolfram Research, Inc.: Mathernatica~ Author: K, peters TECHNIP Germany GmbH, DiUsseldorf ~ Te1..+49(0)211-6593 280 Ernail: kpeters@technip.com 1 Visit u s in Hall 7, Booth 1 E 49 1 I I -I 14 3R internabnd - Internat~ondEdition 2006 : :