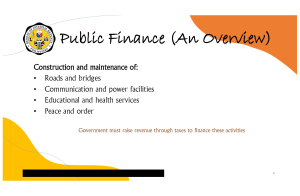
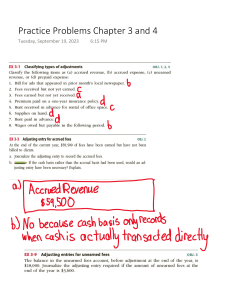
High School Math Formulas Percentage and interest = r r : growth rate F : final value I : Initial value F −1 I p %= r ⋅100% Percentage-wise change p K = K 0 ⋅ (1 + r ) n K : Future value after n interest terms K 0 : initial value Factorization and Quadratic Identities 𝑥𝑥 · 𝑎𝑎 + 𝑥𝑥 · 𝑏𝑏 = 𝑥𝑥 · (𝑎𝑎 + 𝑏𝑏) 1 (𝑎𝑎 ± 𝑏𝑏)2 = 𝑎𝑎2 + 𝑏𝑏 2 ± 2𝑎𝑎 · 𝑏𝑏 Fraction rules 𝑎𝑎2 − 𝑏𝑏 2 = (𝑎𝑎 − 𝑏𝑏) · (𝑎𝑎 + 𝑏𝑏) 𝑏𝑏 𝑎𝑎 · = 𝑎𝑎/𝑏𝑏 𝑐𝑐 𝑎𝑎 Exponent rules 𝑏𝑏 𝑐𝑐 = 𝑐𝑐 𝑎𝑎·𝑏𝑏 𝑎𝑎 𝑏𝑏·𝑐𝑐 · = 𝑑𝑑 𝑐𝑐 𝑎𝑎·𝑐𝑐 𝑏𝑏·𝑑𝑑 𝑎𝑎𝑟𝑟 · 𝑎𝑎 𝑠𝑠 = 𝑎𝑎𝑟𝑟+𝑠𝑠 (𝑎𝑎𝑟𝑟 )𝑠𝑠 = 𝑎𝑎𝑟𝑟·𝑠𝑠 𝑎𝑎 𝑟𝑟 𝑎𝑎 𝑟𝑟 �𝑏𝑏 � = 𝑏𝑏𝑟𝑟 𝑎𝑎−𝑟𝑟 = 1 𝑎𝑎 𝑟𝑟 𝑎𝑎 𝑏𝑏/𝑐𝑐 = 𝑎𝑎/𝑏𝑏 𝑐𝑐/𝑑𝑑 𝑎𝑎 𝑟𝑟 𝑎𝑎 𝑠𝑠 𝑎𝑎·𝑐𝑐 = 𝑏𝑏 𝑎𝑎·𝑑𝑑 𝑏𝑏·𝑐𝑐 = 𝑎𝑎𝑟𝑟−𝑠𝑠 (𝑎𝑎 · 𝑏𝑏)𝑟𝑟 = 𝑎𝑎𝑟𝑟 · 𝑏𝑏 𝑟𝑟 𝑎𝑎0 = 1 , 𝑎𝑎 ≠ 0 𝑠𝑠 √𝑎𝑎𝑟𝑟 = 𝑎𝑎 𝑟𝑟 𝑠𝑠 � � Mathematics Brush Up Course, Department of Mechanical and Electrical Engineering, University of Southern Denmark, DWN, 2023 Logarithm rules The common logarithm: log(𝑎𝑎 𝑥𝑥 ) = 𝑥𝑥 · log (𝑎𝑎) log(𝑎𝑎 · 𝑏𝑏) = log(𝑎𝑎) + log(𝑏𝑏) 𝑎𝑎 log � � = log(𝑎𝑎) − log (𝑏𝑏) 𝑏𝑏 log(10) = 1 Similar rules apply to the natural logarithm (and all other logarithm functions) ln(𝑎𝑎 𝑥𝑥 ) = 𝑥𝑥 · ln (𝑎𝑎) ln(𝑎𝑎 · 𝑏𝑏) = ln(𝑎𝑎) + ln(𝑏𝑏) 𝑎𝑎 ln � � = ln(𝑎𝑎) − ln (𝑏𝑏) 𝑏𝑏 ln(𝑒𝑒) = 1 Graph of the natural logarithm (base e) Only defined for x>0 Vertical asymptote at x=0 Intersects the x-axis at x=1 ln(1) = 0 Heads towards infinity ln(𝑥𝑥) → ∞ for 𝑥𝑥 → ∞ Intersects the point (e,1) Graph of the common logarithm (base 10) Only defined for x>0 Vertical asymptote at x=0 Intersects the x-axis at x=1 log(1) = 0 Heads towards infinity log(𝑥𝑥) → ∞ for 𝑥𝑥 → ∞ Intersects the point (10,1) Mathematics Brush Up Course, Department of Mechanical and Electrical Engineering, University of Southern Denmark, DWN, 2023 2 Functions, graphs and tangents Linear function Definition 𝑓𝑓(𝑥𝑥) = 𝑎𝑎 · 𝑥𝑥 + 𝑏𝑏 The graph of a linear function is a straight line: 𝑦𝑦 = 𝑎𝑎 · 𝑥𝑥 + 𝑏𝑏 a: the slope of the line b: 2nd coordinate of the point where the graph intersects with the y-axis. The slope can be calculated by use of two points (𝑥𝑥1 , 𝑦𝑦1 ) og (𝑥𝑥2 , 𝑦𝑦2 ) on the graph: 𝑎𝑎 = Δy y2 − y1 = Δx x2 − x1 The equation of a tangent t to the graph of the function 𝑓𝑓 at (𝑥𝑥0 , 𝑓𝑓(𝑥𝑥0 )): 𝑦𝑦 = 𝑓𝑓´(𝑥𝑥0 ) · (𝑥𝑥 − 𝑥𝑥0 ) + 𝑓𝑓(𝑥𝑥0 ) The equation of a straight line can also be expressed 𝑎𝑎 · (𝑥𝑥 − 𝑥𝑥0 ) + 𝑏𝑏 · (𝑦𝑦 − 𝑦𝑦0 ) = 0 𝑎𝑎 where � � is a vector that is perpendicular to the line and (𝑥𝑥0 , 𝑦𝑦0 ) is a point on the line. 𝑏𝑏 To fit a linear model to a data set you use linear regression analysis. Mathematics Brush Up Course, Department of Mechanical and Electrical Engineering, University of Southern Denmark, DWN, 2023 3 Exponential function Definition: 𝑓𝑓(𝑥𝑥) = 𝑏𝑏 · 𝑎𝑎 𝑥𝑥 , 𝑏𝑏 > 0 , 𝑎𝑎 > 0 , 𝑥𝑥 ∈ ℝ a: growth factor (a>1) a: decay factor (0<a<1) b: second coordinate of the point where the graph intersects with the y-axis. r : growth rate Growth constant Decay constant 𝑎𝑎 = 𝑇𝑇2 = 𝑇𝑇½ = 𝑥𝑥2 −𝑥𝑥1 � 𝑎𝑎 = 1 + 𝑟𝑟 𝑦𝑦2 𝑦𝑦1 log(2) ln(2) = log(𝑎𝑎) ln(𝑎𝑎) 1 log �2� log(𝑎𝑎) = 1 ln �2� ln(𝑎𝑎) Exponential growth A certain change of x produces a certain %-change of the range element regardless of the initial value of x: f ( x + h) = a h ⋅ f ( x ) To fit an exponential model to a data set you use exponential regression analysis. Mathematics Brush Up Course, Department of Mechanical and Electrical Engineering, University of Southern Denmark, DWN, 2023 4 Power function Definition: 𝑓𝑓(𝑥𝑥) = 𝑏𝑏 · 𝑥𝑥 𝑎𝑎 , 𝑏𝑏 > 0 , 𝑎𝑎 ∈ ℝ , 𝑥𝑥 > 0 Determination of the exponent a using 2 points (𝑥𝑥1 , 𝑦𝑦1 ) og (𝑥𝑥2 , 𝑦𝑦2 ) on the graph: 𝑎𝑎 = log(𝑦𝑦2 ) − log(𝑦𝑦1 ) log(𝑥𝑥2 ) − log(𝑥𝑥1 ) ln(𝑦𝑦2 ) − ln(𝑦𝑦1 ) 𝑎𝑎 = ln(𝑥𝑥2 ) − ln(𝑥𝑥1 ) When the value of x increases by a certain percentage the range element of a power function will change by a certain percentage regardless of the initial value of x : f (h ⋅ x) = h a ⋅ f ( x) To fit a power model to a data set you use power regression analysis. Mathematics Brush Up Course, Department of Mechanical and Electrical Engineering, University of Southern Denmark, DWN, 2023 5 Polynomial Degree n polynomial 𝑝𝑝(𝑥𝑥) = 𝑎𝑎𝑛𝑛 · 𝑥𝑥 𝑛𝑛 + 𝑎𝑎𝑛𝑛−1 · 𝑥𝑥 𝑛𝑛−1 + ⋯ + 𝑎𝑎1 · 𝑥𝑥 + 𝑎𝑎0 Degree 1 polynomial Degree 2 polynomial 𝑓𝑓(𝑥𝑥) = 𝑎𝑎 · 𝑥𝑥 + 𝑏𝑏 𝑝𝑝(𝑥𝑥) = 𝑎𝑎 · 𝑥𝑥 2 + 𝑏𝑏 · 𝑥𝑥 + 𝑐𝑐 Roots (= zeros) of the degree 2 polynomial (if any) 𝑥𝑥 = −𝑏𝑏 ± √𝑑𝑑 2𝑎𝑎 𝑑𝑑 = 𝑏𝑏 2 − 4𝑎𝑎 · 𝑐𝑐 When 𝑥𝑥1 and 𝑥𝑥2 are roots (could be alike) in a degree 2 polynomial it can be factorized 𝑝𝑝(𝑥𝑥) = 𝑎𝑎(𝑥𝑥 − 𝑥𝑥1 )(𝑥𝑥 − 𝑥𝑥2 ) Any polynomial 𝑝𝑝 with one or more roots can be factorized: 𝑝𝑝(𝑥𝑥) = (𝑥𝑥 − 𝑥𝑥1 )𝑞𝑞(𝑥𝑥) where 𝑥𝑥1 is a root of 𝑝𝑝 and q(x) is a polynomial with or without any roots. Mathematics Brush Up Course, Department of Mechanical and Electrical Engineering, University of Southern Denmark, DWN, 2023 6 Trigonometric functions The unit circle The length x is equal to the angle v in radians 𝑥𝑥 = 𝑣𝑣 = Definition of cosine og sine Degrees sin 30° 45° 60° 90° 0 1 2 √2 2 √3 2 1 √3 3 1 √3 - 1 cos 0 tan 180 𝑥𝑥 𝜋𝜋 0° 0 Radians 𝜋𝜋 𝑣𝑣 180 𝜋𝜋 6 √3 2 𝜋𝜋 4 √2 2 𝜋𝜋 3 1 2 𝜋𝜋 2 0 sin2 (𝑥𝑥) + cos2 (𝑥𝑥) = 1 Cosine cosine is periodic: cosine is even: Sine sine is periodic: sine is odd: Harmonic function 7 cos(𝑥𝑥 + 2𝜋𝜋) = cos (𝑥𝑥) cos(−𝑥𝑥) = cos (𝑥𝑥) cos(𝜋𝜋 − 𝑥𝑥) = −cos (𝑥𝑥) sin(𝑥𝑥 + 2𝜋𝜋) = sin (𝑥𝑥) sin(−𝑥𝑥) = −sin (𝑥𝑥) sin(𝜋𝜋 − 𝑥𝑥) = sin (𝑥𝑥) f (t ) = A ⋅ sin(ω ⋅ t + ϕ ) + k A : amplitude ω : angular frequency ϕ : initial phase k : vertical shift T= 2π ω ϕ : phase shift (to the left) ω Mathematics Brush Up Course, Department of Mechanical and Electrical Engineering, University of Southern Denmark, DWN, 2023 Differential calculus The derivative of f at x = x 0 : 𝑓𝑓 ′ (𝑥𝑥0 ) = lim ℎ→0 Differentiation rules 𝑓𝑓(𝑥𝑥0 +ℎ)−𝑓𝑓(𝑥𝑥0 ) ℎ f ´( x0 ) = lim x→ x0 f ( x) − f ( x0 ) x − x0 ′ �𝑘𝑘 · 𝑓𝑓(𝑥𝑥)� = 𝑘𝑘 · 𝑓𝑓 ′ (𝑥𝑥) ′ �𝑓𝑓(𝑥𝑥) ± 𝑔𝑔(𝑥𝑥)� = 𝑓𝑓 ′ (𝑥𝑥) ± 𝑔𝑔′ (𝑥𝑥) ′ �𝑓𝑓(𝑥𝑥) · 𝑔𝑔(𝑥𝑥)� = 𝑓𝑓 ′ (𝑥𝑥) · 𝑔𝑔(𝑥𝑥) + 𝑓𝑓(𝑥𝑥) · 𝑔𝑔′(𝑥𝑥) ′ �𝑓𝑓�𝑔𝑔(𝑥𝑥)�� = 𝑓𝑓′(𝑔𝑔(𝑥𝑥)) · 𝑔𝑔′(𝑥𝑥) Function The derivative ln(x) 1 𝑥𝑥 𝑒𝑒 𝑥𝑥 8 𝑒𝑒 𝑥𝑥 𝑒𝑒 𝑘𝑘·𝑥𝑥 𝑘𝑘 · 𝑒𝑒 𝑘𝑘·𝑥𝑥 𝑎𝑎 𝑥𝑥 𝑎𝑎 𝑥𝑥 · ln (𝑎𝑎) 𝑥𝑥 𝑎𝑎 𝑎𝑎 · 𝑥𝑥 𝑎𝑎−1 √𝑥𝑥 1 2√𝑥𝑥 1 𝑥𝑥 − cos (𝑥𝑥) sin (𝑥𝑥) k 1 𝑥𝑥 2 − sin(𝑥𝑥) (constant) cos(𝑥𝑥) 0 Mathematics Brush Up Course, Department of Mechanical and Electrical Engineering, University of Southern Denmark, DWN, 2023 Integral calculus Function Indefinite integral (antiderivative) (+ an arbitrary constant) 𝑒𝑒 𝑥𝑥 𝑒𝑒 𝑥𝑥 𝑒𝑒 𝑘𝑘·𝑥𝑥 1 𝑘𝑘 𝑥𝑥 𝑎𝑎 1 𝑥𝑥 𝑎𝑎+1 𝑎𝑎+1 √𝑥𝑥 2 𝑥𝑥√𝑥𝑥 3 · 𝑒𝑒 𝑘𝑘·𝑥𝑥 𝑎𝑎 𝑥𝑥 ln (𝑎𝑎) 𝑎𝑎 𝑥𝑥 1 𝑥𝑥 ln|x| cos (𝑥𝑥) sin (𝑥𝑥) sin (𝑥𝑥) k (constant) −cos (𝑥𝑥) k· 𝑥𝑥 Integration rules 9 F (x) is an antiderivative of f Indefinite integrals ∫ 𝑓𝑓(𝑥𝑥) 𝑑𝑑𝑑𝑑 = 𝐹𝐹(𝑥𝑥) + 𝑐𝑐 ∫ 𝑘𝑘 · 𝑓𝑓(𝑥𝑥) 𝑑𝑑𝑑𝑑 = 𝑘𝑘 · ∫ 𝑓𝑓(𝑥𝑥) 𝑑𝑑𝑑𝑑 ∫ 𝑓𝑓(𝑥𝑥) ± 𝑔𝑔(𝑥𝑥) 𝑑𝑑𝑑𝑑 = ∫ 𝑓𝑓(𝑥𝑥) 𝑑𝑑𝑑𝑑 ± ∫ 𝑔𝑔(𝑥𝑥) 𝑑𝑑𝑑𝑑 Integration by substitution: ∫ 𝑓𝑓(𝑔𝑔(𝑥𝑥)) · 𝑔𝑔′(𝑥𝑥) 𝑑𝑑𝑑𝑑 = ∫ 𝑓𝑓(𝑡𝑡)𝑑𝑑𝑑𝑑 Integration by parts: ∫ f ( x) ⋅ g ( x)dx = F ( x) ⋅ g ( x) − ∫ F ( x) ⋅ g´(x)dx , t = g (x) Mathematics Brush Up Course, Department of Mechanical and Electrical Engineering, University of Southern Denmark, DWN, 2023 𝑏𝑏 ∫𝑎𝑎 𝑓𝑓(𝑥𝑥) 𝑑𝑑𝑑𝑑 = [𝐹𝐹(𝑥𝑥)]𝑏𝑏𝑎𝑎 = 𝐹𝐹(𝑏𝑏) − 𝐹𝐹(𝑎𝑎) Definite integrals: 𝑏𝑏 𝑐𝑐 𝑏𝑏 � 𝑓𝑓(𝑥𝑥) 𝑑𝑑𝑑𝑑 = � 𝑓𝑓(𝑥𝑥) 𝑑𝑑𝑑𝑑 + � 𝑓𝑓(𝑥𝑥) 𝑑𝑑𝑑𝑑 𝑎𝑎 𝑎𝑎 𝑏𝑏 𝑐𝑐 𝑏𝑏 ∫𝑎𝑎 𝑘𝑘 · 𝑓𝑓(𝑥𝑥) 𝑑𝑑𝑑𝑑 = 𝑘𝑘 · ∫𝑎𝑎 𝑓𝑓(𝑥𝑥) 𝑑𝑑𝑑𝑑 𝑏𝑏 𝑏𝑏 𝑏𝑏 ∫𝑎𝑎 𝑓𝑓(𝑥𝑥) ± 𝑔𝑔(𝑥𝑥) 𝑑𝑑𝑑𝑑 = ∫𝑎𝑎 𝑓𝑓(𝑥𝑥) 𝑑𝑑𝑑𝑑 ± ∫𝑎𝑎 𝑔𝑔(𝑥𝑥) 𝑑𝑑𝑑𝑑 𝑏𝑏 Integration by substitution: b Integration by parts: 𝑔𝑔(𝑏𝑏) 𝑔𝑔(𝑏𝑏) ∫𝑎𝑎 𝑓𝑓(𝑔𝑔(𝑥𝑥)) · 𝑔𝑔′(𝑥𝑥) 𝑑𝑑𝑑𝑑 = ∫𝑔𝑔(𝑎𝑎) 𝑓𝑓(𝑡𝑡) 𝑑𝑑𝑑𝑑 = [𝐹𝐹(𝑡𝑡)]𝑔𝑔(𝑎𝑎) = 𝐹𝐹�𝑔𝑔(𝑏𝑏)� − 𝐹𝐹�𝑔𝑔(𝑎𝑎)� ∫ f ( x) ⋅ g ( x)dx a = [ F ( x) ⋅ g ( x) ]a − b b ∫ F ( x) ⋅ g´( x)dx a Volume of solid of revolution b Vx= π ⋅ ∫ f ( x) 2 dx a 10 Differential Equations Equation 𝑦𝑦 ′ = ℎ(𝑥𝑥) Solution dy = h( x ) dx 𝑦𝑦 = ∫ ℎ(𝑥𝑥)dx dy = k⋅y dx 𝑦𝑦 ′ = 𝑘𝑘 · 𝑦𝑦 𝑦𝑦 ′ = 𝑏𝑏 − 𝑎𝑎 · 𝑦𝑦 𝑦𝑦 ′ = 𝑦𝑦 · (𝑏𝑏 − 𝑎𝑎 · 𝑦𝑦) 𝑦𝑦 ′ = 𝑎𝑎 · 𝑦𝑦 · (𝑀𝑀 − 𝑦𝑦) 𝑦𝑦 ′ + 𝑔𝑔(𝑥𝑥) · 𝑦𝑦 = ℎ(𝑥𝑥) Separation of variables: 𝑦𝑦 = 𝑐𝑐 · 𝑒𝑒 𝑘𝑘·𝑥𝑥 dy = b−a⋅ y dx 𝑏𝑏 𝑎𝑎 𝑦𝑦 = + 𝑐𝑐 · 𝑒𝑒 −𝑎𝑎·𝑥𝑥 dy = y ⋅ (b − a ⋅ y ) dx 𝑦𝑦 = dy = a ⋅ y ⋅ (M − y) dx 𝑦𝑦 = dy + g ( x) ⋅ y = h( x ) dx dy =g ( x) ⋅ h( y ) ⇔ dx 1 𝑏𝑏 𝑎𝑎 1+𝑐𝑐·𝑒𝑒 −𝑏𝑏·𝑥𝑥 𝑀𝑀 1+𝑐𝑐·𝑒𝑒 −𝑎𝑎·𝑀𝑀·𝑥𝑥 𝑦𝑦 = 𝑒𝑒 −𝐺𝐺(𝑥𝑥) ∫ ℎ(𝑥𝑥) · 𝑒𝑒 𝐺𝐺(𝑥𝑥) 𝑑𝑑𝑑𝑑 ∫ h( y) dy =∫ g ( x)dx Mathematics Brush Up Course, Department of Mechanical and Electrical Engineering, University of Southern Denmark, DWN, 2023 Geometry Equiangular Triangles 𝑎𝑎1 𝑏𝑏1 𝑐𝑐1 = = = 𝑘𝑘 𝑎𝑎 𝑏𝑏 𝑐𝑐 Right-angled Triangle B c a 11 A b C Pythagoras cosine, sine & tangent in right-angled triangles 𝑎𝑎2 + 𝑏𝑏 2 = 𝑐𝑐 2 cos(𝐴𝐴) = sin(𝐴𝐴) = tan(𝐴𝐴) = 𝑏𝑏 𝑐𝑐 𝑎𝑎 𝑐𝑐 𝑎𝑎 𝑏𝑏 Mathematics Brush Up Course, Department of Mechanical and Electrical Engineering, University of Southern Denmark, DWN, 2023 Any triangle B c a A b C Sine rule 𝑏𝑏 𝑐𝑐 𝑎𝑎 = = sin (𝐴𝐴) sin (𝐵𝐵) sin(𝐶𝐶) Cosine rule 𝑐𝑐 2 = 𝑎𝑎2 + 𝑏𝑏 2 − 2 · 𝑎𝑎 · 𝑏𝑏 𝑐𝑐𝑐𝑐𝑐𝑐(𝐶𝐶) 𝐶𝐶 = cos−1 � Area of triangle 𝑇𝑇 = Circle Area of circle 𝑎𝑎2 + 𝑏𝑏 2 − 𝑐𝑐 2 � 2𝑎𝑎𝑎𝑎 1 · 𝑎𝑎 · 𝑏𝑏 · 𝑠𝑠𝑠𝑠𝑠𝑠(𝐶𝐶) 2 𝐴𝐴 = 𝜋𝜋 · 𝑟𝑟 2 Circumference of circle 𝑂𝑂 = 2 · 𝜋𝜋 · 𝑟𝑟 Geometry in 2 D Distance between 2 points 𝐴𝐴(𝑥𝑥1 , 𝑦𝑦1 ) og 𝐵𝐵(𝑥𝑥2 , 𝑦𝑦2 ) AB = �(𝑥𝑥1 − 𝑥𝑥2 )2 + (𝑦𝑦1 − 𝑦𝑦2 )2 The midpoint M between two points 𝐴𝐴(𝑥𝑥1 , 𝑦𝑦1 ) og 𝐵𝐵(𝑥𝑥2 , 𝑦𝑦2 ) 𝑥𝑥1 +𝑥𝑥2 2 M =� , 𝑦𝑦1 +𝑦𝑦2 � 2 Mathematics Brush Up Course, Department of Mechanical and Electrical Engineering, University of Southern Denmark, DWN, 2023 12 Vectors in 2 D → Length of a vector 𝑎𝑎⃗ |𝑎𝑎⃗| = �𝑎𝑎12 + 𝑎𝑎22 a a = 1 a2 Coordinates of a vector 𝑎𝑎1 𝑘𝑘 · 𝑎𝑎1 𝑘𝑘 �𝑎𝑎 � = � � 𝑘𝑘 · 𝑎𝑎2 2 Multiplication by a scalar ∧ → ∧ → → Unit vector a in the direction of a : a= → a → (the concept ”tværvektor” is not used outside Denmark) a Sum of vectors / difference of vectors 𝑎𝑎1 𝑏𝑏 𝑎𝑎 ± 𝑏𝑏1 𝑎𝑎⃗ ± 𝑏𝑏�⃗ = �𝑎𝑎 � ± � 1 � = � 1 � 𝑏𝑏2 𝑎𝑎2 ± 𝑏𝑏2 2 Dot product 𝑏𝑏�⃗ 𝑎𝑎⃗ · 𝑏𝑏�⃗ = 𝑎𝑎1 𝑏𝑏1 + 𝑎𝑎2 𝑏𝑏2 → → → 2 a⋅a= a v 𝑎𝑎⃗ 𝑎𝑎⃗ · 𝑏𝑏�⃗ = |𝑎𝑎⃗||𝑏𝑏�⃗| · cos (𝑣𝑣) v is the angle between 𝑎𝑎⃗ and 𝑏𝑏�⃗. Perpendicular vectors 𝑎𝑎⃗ 𝑎𝑎⃗ · 𝑏𝑏�⃗ = 0 ⇔ 𝑎𝑎⃗ ⊥ 𝑏𝑏�⃗ 𝑏𝑏�⃗ Projection of 𝑏𝑏�⃗ on 𝑎𝑎⃗ 𝑏𝑏�⃗ 𝑏𝑏�⃗𝑎𝑎 𝑎𝑎⃗ 𝑏𝑏�⃗𝑎𝑎 = Length of projection vector 𝑎𝑎⃗ · 𝑏𝑏�⃗ 𝑎𝑎⃗ |𝑎𝑎⃗|2 |𝑏𝑏�⃗𝑎𝑎 | = �𝑎𝑎⃗ · 𝑏𝑏�⃗� |𝑎𝑎⃗| Mathematics Brush Up Course, Department of Mechanical and Electrical Engineering, University of Southern Denmark, DWN, 2023 13 Determinant of vectors det�𝑎𝑎⃗, 𝑏𝑏�⃗� = 𝑎𝑎1 𝑏𝑏2 − 𝑎𝑎2 𝑏𝑏1 = � 𝑎𝑎1 𝑎𝑎2 det�𝑎𝑎⃗, 𝑏𝑏�⃗� = |𝑎𝑎⃗||𝑏𝑏�⃗| · sin(𝑣𝑣) 𝑏𝑏1 � 𝑏𝑏2 v is the angle from 𝑎𝑎⃗ to 𝑏𝑏�⃗ (positive anticlockwise and negative clockwise) Parallel vectors: det�𝑎𝑎⃗, 𝑏𝑏�⃗� = 0 ⇔ 𝑎𝑎⃗ ∥ 𝑏𝑏�⃗ Area of the parallelogram spanned by 𝑎𝑎⃗ og 𝑏𝑏�⃗ 𝐴𝐴 = |det (𝑎𝑎⃗, 𝑏𝑏�⃗)| 𝑏𝑏�⃗ 𝑎𝑎⃗ 14 Mathematics Brush Up Course, Department of Mechanical and Electrical Engineering, University of Southern Denmark, DWN, 2023 Vectors in 3 D Most definitions and theorems concerning vectors in 2 D can be transferred to 3 D by adding a 3rd coordinate. Specific definitions and theorems for vectors in 3 D: Vektor product (cross product) 𝑎𝑎⃗ × 𝑏𝑏�⃗ 𝑏𝑏�⃗ v 𝑎𝑎 � 2 𝑎𝑎 ⎛ 3 𝑎𝑎 𝑎𝑎⃗ × 𝑏𝑏�⃗ = ⎜� 3 ⎜ 𝑎𝑎1 𝑎𝑎 � 1 ⎝ 𝑎𝑎2 Lenght of a vector product 𝑏𝑏2 � 𝑏𝑏3 ⎞ 𝑏𝑏3 ⎟ � 𝑏𝑏1 ⎟ 𝑏𝑏1 � 𝑏𝑏2 ⎠ �𝑎𝑎⃗ × 𝑏𝑏�⃗� = |𝑎𝑎⃗||𝑏𝑏�⃗|sin (𝑣𝑣) 𝑎𝑎⃗ v is the angle between 𝑎𝑎⃗ and 𝑏𝑏�⃗ . 𝑎𝑎⃗ × 𝑏𝑏�⃗ Area of the parallelogram spanned by 𝑎𝑎⃗ and 𝑏𝑏�⃗ 𝑏𝑏�⃗ v 𝐴𝐴 = �𝑎𝑎⃗ × 𝑏𝑏�⃗� 𝑎𝑎⃗ Geometry in 3 D Sphere Equation of a sphere with centre 𝐶𝐶(𝑥𝑥0 , 𝑦𝑦0 , 𝑧𝑧0 ) and radius r (𝑥𝑥 − 𝑥𝑥0 )2 + (𝑦𝑦 − 𝑦𝑦0 )2 + (𝑧𝑧 − 𝑧𝑧0 )2 = 𝑟𝑟 2 Mathematics Brush Up Course, Department of Mechanical and Electrical Engineering, University of Southern Denmark, DWN, 2023 15 Line in 3 D Parametric form of the line l through 𝑃𝑃0 (𝑥𝑥0 , 𝑦𝑦0 , 𝑧𝑧0 ) with 𝑟𝑟1 direction vector 𝑟𝑟⃗ = �𝑟𝑟2 � 𝑟𝑟3 𝑥𝑥0 𝑟𝑟1 𝑥𝑥 �𝑦𝑦� = �𝑦𝑦0 � + 𝑡𝑡 �𝑟𝑟2 � 𝑧𝑧0 𝑟𝑟3 𝑧𝑧 Distance between the point P and the line l intersecting the point 𝑃𝑃0 and having the direction vector 𝑟𝑟⃗ P 𝑟𝑟⃗ 𝑃𝑃0 𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑(𝑃𝑃, 𝑙𝑙) = l |𝑟𝑟⃗ × �������⃗ 𝑃𝑃0 𝑃𝑃| |𝑟𝑟⃗| 16 Plane in 3 D 𝑛𝑛�⃗ α P0 The equation of a plane α through 𝑃𝑃0 (𝑥𝑥0 , 𝑦𝑦0 , 𝑧𝑧0 ) where 𝑎𝑎 𝑛𝑛�⃗ = �𝑏𝑏� is a vector perpendicular to the plane 𝑐𝑐 𝑎𝑎 · (𝑥𝑥 − 𝑥𝑥0 ) + 𝑏𝑏 · (𝑦𝑦 − 𝑦𝑦0 ) + 𝑐𝑐 · (𝑧𝑧 − 𝑧𝑧0 ) = 0 P α Distance between the point 𝑃𝑃(𝑥𝑥1 , 𝑦𝑦1 , 𝑧𝑧1 ) and the plane α given by 𝑎𝑎 · 𝑥𝑥 + 𝑏𝑏 · 𝑦𝑦 + 𝑐𝑐 · 𝑧𝑧 + 𝑑𝑑 = 0 𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑(𝑃𝑃, 𝛼𝛼) = |𝑎𝑎 · 𝑥𝑥1 + 𝑏𝑏 · 𝑦𝑦1 + 𝑐𝑐 · 𝑧𝑧1 + 𝑑𝑑| √𝑎𝑎2 + 𝑏𝑏 2 + 𝑐𝑐 2 Mathematics Brush Up Course, Department of Mechanical and Electrical Engineering, University of Southern Denmark, DWN, 2023