SPE-35296 Conversion of a Semisubmersible Drilling Rig to a DP Unit
advertisement

Ei!!!B
m
Society of Petrm
SPE 35296
Engineere
Conversion of a Semisubmersible Drilling Rig to a DP Unit
Edson L. Megale Vale, Edmilson S. de Medeiros, Arthur C. Neto, Paulo P, Ribas Ferreira, Petrobras
Co~cght
1996
Soc,ety
of Petroleum
Thns paper was prepared
Mexico
held (m V(llaherm.sa.
Th(s paper was elected
!n!omnatmn
contajned
..!
Engineers,
for presentation
MeKwo, 5.7 March
for pfes.mtatmn
I.
an abstract
m.e.t.d
h...
b-.
ccw..bo.
by the a.thoc(s)
In.
at lhe Intl
[.,,-4
Conference
h Exhtbmo.
Major item addressed are additional generators sets and
azimuthing thrust crs, integrated automation system for
positioning control] and monitoring diesel engine, power
managcmen(. bilge and ballast, stability, ventilation and
alarms.
The conversion design is under development and the
plans are to h:nc the rig ready on DP mode up to middle
1997.
01
1996
by the SPE
s. brndted
Program
by the
Commrftee
a.tm(s)
followng
Contents
of
the
rwew’
of
DaPeC
as
SOCI.V Of petr.1..m
E.g#..e~
..d =e .. bje.t t.
as
presented
does ..[ ne.e$sar(ty
reflect any
mateoal.
‘v
The
Petroleum
the
P.sltlo.
of the Soclely .1 petmle.m
Eng,neers
O( tis members
Paper.
presented at SPE
meetmgs
are subjected
t. publncatmn rewew by Edttorm! Cwnmttee
of the Soc,ety of
Petroleum Engineers
Permtswan
to copy (s Iestrtcted to an abstraa of nol nwe than 3W
‘.wxds
Illuslrat$o.s
acknowledgement
Box 8333836
may
of tieie
Richardson
not
be
cop!ed
and by tiom
TX 75083.3836
The
abstract
should
the papef was presented
U S A
Wfle
contain
conspicuous
Ltbranan,
SPE P O
fax 01.214-952.9435
Description
The scmisubrnersiblc drilling unit PETROBRAS-23 is a 4
columns twin deck catamaran type unit const.meted on 1985
according to the rrrlcs of Norwegian Maritime Directorate
and Department of Energy (’UK), and classified by Det Norsk
Verilas.
The unit has as it is the following main dimensions:
Length over all.
97,70 m
Length bctwccn perpendiculars:
80,56 m
Breadth exkcmc.
82,00 m
Breadth bclofv pon[oon deck:
70,75 m
Height to main deck (morslded): 41,00 m
Height to Iowcr deck (rnouldcd): 33,00 m
Breadth of pomoons (motrlded):
18,09m
Hcigth of pontoons (mouldcd):
7,50 m
Nom]al operation drought
( from underside du-ustcrs):
24,26 m
Maximun opcmtion draugh[
( from underside thrusters)
26,26 m
Transit drought:
10.99 m
Sunrival drauglu
19,96 m
Height from trudcrside thrusters
tOkeel phtc:
3,76 m
Lightweight:
13873 t
Long. Centrc of Gravity (LCG):
0,56m
Trans. Ccmtrc of Gravity (TCG):
0,11 m
Vcrt. Ccntrc of Gravitv (VCG):
27,24 m
Deck payload:
3071 t
Column payload:
700 t
Pontoon payload:
2500 t
Abstract
The scope of \vork ~vhich this paper is based on is the
conversion of the scmisubmersiblc drilling rig PETROBRASXXHI (Ex-VINNI) from the original mode of operation to a
dynamic positioning unit, capable to operate on offshore
fields of Brazilian coas[ from 1(JOto 1500 m \va[er depths.
Originally such unit was dcsigrtcd by GVA, named GVA
4000, 10 operate up to 460 m water depdr, positioned by
mcnns of a 8-point mooring system.
The conversion is based on the brazilian \vatcrs
cnvironmcn(al conditions and the design cri(cria is according
10DNV rules and the principle of W,
as stated for class 2.
Introduction
In [he last fcw !ears the global drilling offshore flcc( IMS
sluunk for many different reasons and the small group of deep
wa{cr mobile platforms arc now facing a high demand,
The most significant aspect is related to the decpwa(cr
dynamic positioning drilling market !rhich seems to be
ovcbookcd in a short and medium scenarios.
Compared 10 new construction, com’crsion of anchored
uni[s is a cost affcctivc solution in order to reduce the
ncgatiic cffcc[s of the market situation on PETROBRAS
drilling program.
The conversion of PET’ROBRAS-XXH1 will help the
Company in slowing down the market pressure as well as
better adjust its own fleet to the company’s scope of drilling
and completion work, mainly located in decptva(crs.
55
2
CONVERSION
OF
A SEMISUBMERSIBLE
DRILLING RIG TO A DP UNIT
SPE 35296
Det norskc \/cri[:]s, Rules for the construction and
classification of Mobile Offshore Units includlng Pt. 6, Ch. 7.
The unit is provided with a generation plant with 4 (four)
3100 Kw, 6300 V, diesel generator sets.
The propulsion of the unit is provided with 4 (four) 2400 Kw
pitc!l controlled azimuth thrusters, however. she is classified
as a non-self-propelled uniL
Sec. 1, eligablc for the class notation * 1Al COLUMN
STABILIZED
UNIT DRILLING
VESSEL,
HELDK.
DYNPOS AUTR, EO, DRILL
httemational Load Line Convention, 1966, as amended;
International Conference on the Safety of Life at Sea
(SOLAS), 1974, as amended;
IMO-MARPOL 73/78, Regulation 26 of Annex I, Protocol
and Resolution MEPC.54(32) of 6 March 1992;
International Regulations for Preventing Collisions at Sea
(London, 1972) with Resolution A-464 (XII);
International Labour Convention (No. 133, 1970, Revision
1971);
International Regulation relating to Tonnage Measurement of
Ships, 1969:
Brazilian Maritime Laws;
IEC-92
IMO Guidelines for Dynamic Positioning Systems for
MODUs and Ships engaged in similar operations DE37
(Draft).
IMO Code for Noise Levels Onboard Ships (new areas)
IMO-MODU CODE 1989 with Amendment 1991.
IMO MSC/CIRC 64S “Guidelines for vessels with Dynamic
Positioning Systems of June 6th, 1994, as class 2.
Data and Results
A first approach of the conversion has been performed in the
way of to get a figure from the technical and economic point
of view and taking into account the strategic aspects vis a vis
the trend of DP rigs market.
The world wide DP rig market have at this time 13 active
units, being six of them in operation off Brazil. The market
trend is to reach close to a collapse as the fleet has been not
increased either from new constructions or conversions.
The PETROBRAS drilling program foreseen for the next
6 year-srequires 12 DP units.
The estimated cost of the conversion had the fi~mres as
shown in Table 1. Therefore, the actual value of the platform
after conversion is (figures in Million USD):
77,8 + 50,0= 127,8
being USD 50,0 million the expected market price for the
platfoml.
pwformancc
requirements
with
Design criteria
loading conrfitions. The positioning system to be designed
and stability to bc evaluated for the environmental conditions
encountered in Cmnpos Basin and Santos Basin in Brazilian
waters. The Table 2 gives the main environmental conditions
representing the most severe e,-qected weather condition
stated for cacti rctum period.
The minimum temperatures considered for hull structural
steel arc -20” C for special areas and zero degree for other
areas.
Not withstanding the requirements given bv the
mentioned mlcs and regulations, the operational limits to be
considered in Ihc design arc specified in Table 3.
The spccificd thruster capacity of 8 thrusters each having
a nominal thrust of 400 kN, to remain even if the above limits
●
rc excccdcd (see Fig. 3,a to 3.e).
Reliability and availability reviews in form of FMEA are
required, M dcscribcd in E600 of abo~rc mentioned DNV
rules. As a guidance, the standard MIL-STD- 1629 is
recommended. The reliability and availability indexes shall bc
predicted based on data gathered from suppliers or databanks
for the overall DP systcru, including power generation,
measuring. remote control and thruster systems and control
panels.
iin(f
Modifications.
1[ is the intent of the conversion of
PETROBRAS-XXII1 to introduce some modifications on the
unit as follows.
The aft part of the deck box to be extended and in this
extension the new diesel generators sets. electrical
switchboards, transformers etc to be located.
Four complete azimutbing thrusters to be installed. one
forward and onc aft in each pontoon.
Four ballast tanks to be converted into thms[er rooms,
which include installation of watertight doors. ven[itation,
lighting. gratings, means for communication etc.
The existing wheelhouse to be extended ~vith a DP
control centrc and a computer.
The engine control room to contain the controls for the
machincn and ballast system. The DP control centre in the
wheelhouse to con[ain the controls for navigation and DP. but
[here ~vill also bc an operators station for machineV
supcn ision and poJvcr management control.
The cxistiog blisters on the four columns to bc increased
as Ivcll as the stability boxes on pontoonslcolumns.
The drilling systems to be upgraded for drilling in deep
water by the addition of a top drive and modification of the
marine riser, BOP system and tensioning system
Rules and RcLwltitions. The modifications and upgrading to
be designed and performed to comply with requirements of
the following rules rmd regulations:
Stationkccping S]-stem. A Dynamic Positioning System (DP
systcm) to bc provided completely separated from all other
control s~stems and capable of keeping the vessel, within the
56
SPE 35296,
E L MEGALE VALE, E S DE MEDEIROS,
qsccificd limits, on a preset position iu)d heading
au[oma[icall~, and follow a prcdctincd track. b} controlling
lhc propulsion systcnl,
The DP control system to bc a DUPLEX systcm (2
computers). according to the rcquircmcnt of the Classification
Society (DnV DYNPOS AUTR).
The two computers to have exactly the same
petfomwtce, opcra[ing on exactly the same input from each
of the sensors and positioning reference systems to calcula(e
the required tfuustcr command for counteracting the
environmental forces in order to keep position and heading. In
case of a fault in one of the two computers, the remaining one
will automatically [akc over. Manual operation is provided.
The priority of the thnrster allocation logic, while
changing heading automatically, to be [o keep the position
!vithin the specified limits.
Simdufirm
Mmfe.The
simulation
mode to provide
possibilities for the operator to simula(c the follo]ving
\,ariables: Ivind condition (speed and direction), currcn[ (speed
a]id direction). wave (hciglu, period and direction), number of
[hrustcrs (including fixed or ~anable azirnuthing) and number
of generators
11P .$’,IWCW.Vcn.wm
urrd Positioning
Reference
Svstems.
The
DP system to provide the necessary interfaces to handle all
LIicsensor equiptnen[ and posi[ion reference systems,
The following ncw sensors and equipment to bc provided
and connected to each of the tivo computers of the DP system
The following new sensors and equipment 10 bc provided
:md connected to each of the two computers pf the DP system.
Unif ,serLYor.Y: Gyrocorupasses (3), Vertical Reference
Sensors (3), Wind Sensors (3)
Surjke
Position
Reference .Sv,r[ew:
DGPS, Upper Bali
Joint Angle, Accoustic Riser Arrglc (ARA).
.suh,sur~ace ReJercncc Swfcn?,s: Hydroaccoustic Position
Rcfcrcncc Systcm (Long Base Line/Short Bmc Line). Taut
Wire (2), Diffcrcncial Elccwic Riser Angle (ERA)
As.wciuted
Hurdwurc
Setr.ww. For displaying and recording
purpose, the follo~ving cn~ironmett[al sensors to bc provided:
Surface current meter type ordinw speed log;
Subsefi current rnctcr for nominal water depth of 1500 m:
Heave meter.
Dufu k~gging sys?em (DLS). Tbc Data Logging Systcm to
be cfipablc of logging and retrieving data from DP system in
order to im’cstigatc reasons for an accident. and for
CII\ ironn]c]][:llda[a logging
Prin(crs. Each computer systcm to bc equipped with a fas[
and good quality printer capable of printing both text ,and
gmpbics for the purpose of producing hard copy of the
systcm’s error messages and graphic copy of the data trending
reports and displays,
Uninterrupted
Power SsqJp{V Unik
Power supply to the DP
syslcm, sensors, positioning reference systems and for each
DP console to be supplied via Unituenupted Power Supply
uni[s (UPS), cacb consisting of a battery charger, batteries, an
Etwironmartul
A C NETO, P P RIBAS FE RREIRA
3
in!crtcr, a sta[ic s]! i[ch and a by-pass switch. !Jith ou(put
suitable for the conncctcd s}stcm.
DP Svstem .Tofhwre
,i fafh,,mafi~ a/ ImN/r/
The DP s~stcm to use a mathematical
model of the Unit to optimize its performance. The model to
be a hydrodynamic description of the vessel} which involves
some charactctist ics such as mass and drag, describing how it
reacts, or moves, as a function of the forces acting upon il. It
shall cs[imatc Icsscl’s hcadirrg, positions and velocities,
,4zintu(hing ~loc~rJ7~.
Blocking of certain azimuthing sectors
is 10 bc iocludcd in the DP software to minimize
thrustcrhhntstcr and thrusterllntll interference.
.4zinfufhirr,g Fai/ure.
in case of failure of the azimuthing
function on a thntster. the DP system to consider a Iocked
azirnuthing angle for any thruster,
7hru.r/cr Power Confrd
The thruster power control system,
~vithin the DP systcm (o bc based on four different operational
modes of Ihc high \ol(agc switch gears configurdion.
DP s}stcm softwwe to use Kahnart
Ko/moH
Fi//vr.
VW
filtering technique Nith positioning reference systems to
cstirnatc position and hc~ding of the vessel. This to be in
addition to the Kairn.an filtering model used to position the
lower riser rcla[ive to the i~ellhead.
Riser EfJectf. The DP sys[crn software to consider the effects
of tbc subsea current onto the column of the riser, when the
BOP is conncctcd (o the wellhead.
Conwqucrrce
.-ina(lsi,f.
Online consequence analysis to be
pcrfonned
during DP operation,
reporting
possible
consequences based upon actual weather conditions, engaged
thrusters and power plant status. This diagnostic to be based
upon prcdctlned Jcsscl worst case failures. If any
consequence of failure exists this will be reported to tbc
operator by an alaml message.
The DP
Power ,1fana(qcmenf and B/acL-ouf Prevention.
system to bc capable of optimally control the propulsion
system during critical opcra[ion, without overloading the
pow’cr plant. The o~crall purpose of the DP black-otd
prcvcrttion function 10 be to perform a pilch or speed
reduction on applicable thrusters, to prevent a pov’er blackout situation on [hc power bus.
Setting of on Ex(ernal ~o17,wJ111 Force .4c[ing on the I’e.v.wl.
The DP systcm softwarc (o compensate an extcmal horizontal
force constant both in in(cnsity and direction, set by the
opcra[or This function to bc used when operating Jvith one or
t~voanchor lines iogc(hcr uith the DP system.
UTM Corrrdiwte
.Sr.rton. When working with DGPS and
absohttc coordinate systems the DP system to use data related
to Hayford Ellipsoid uith UTM projection, according to a
central mandian of minus 39 degrees.
Positioning
Rcferencc
$w-tenm.
Possibilities for the DP
systcm to usc all the surface and subsurface positioning
reference system at the same lime to be provided, thereby
increasing redundancy and quality of the position measured.
The DP systcm soft~}arc to calculate and use a weighing
CONVERSION
4
OF A SEMISUBMERSIBLE
DRILLING RIG TO A DP UNIT
condcnscr
installed.
factor [0 Jveigb the posilion information from one reference
system, cons. idcring t.ha[ the higher a sys[em’s variance is, the
lower shall be its weighing-factor.
IMum point
Possibilities to be arranged for the operator to
al~er the DP system datum point [o the position of the
wellhead (in UTM coordinates) with all offsets, commands,
vessel and transponder positions being referred to it.
4
Type:
Azimuthing thruster with fixed
pitch propeller in nozzle
360 degrees
400 kN
2400 kW
NiAl bronze
.4ngular
movement:
Thrust each:
Outpuf each wlotor:
Propeller material:
.Vutl]bcr oJ blades
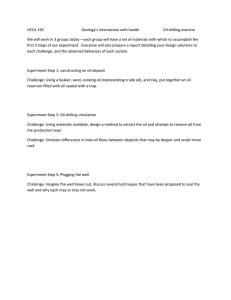
water .~r.tiem. A separate cooling water system (Fig,
1) for the additional generator diesel engines and the
additional azimuthing thrusters to be arranged in accordance
to the enclosed principal diagram. The system to have the
same system layout as the esisting cooling water system for
generator diesel engines and thrusters,
Fuel oiI ~ytiem. A new additional fuel oil distribution system
for the new diesel engines to be arranged.
Lubricating
oil ~ytiem. The new additional diesel engines to
be connected 10the existing lubricating oil system,
.!Varting air sjulenr.
A new additional starting air receiver to
be installed for the new diesel engines,
Exltauw
system.
Each new generator diesel to be provided
with separate exhaust gas pipe and silencer. Exhaust gas pipes
for existing generator diesels to be relocated to have their
outlets aft of the new extended deck box aft.
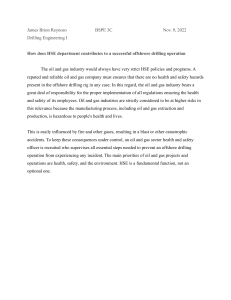
Power Distribution System
See one line diagram in Fig. 2,
High vokuge srri!chbourd.
A new additional high voltage
switchboard to be installed. The switchboard to be divided in
two (2) sections, with the 6.3 kV busbar splitted in two parts
by a bus-tie breaker.
(%ouping,
Each of the four high voltage generator and
thruster groups 10 consist of uvo generators and two thrusters.
[n each of the groups one thruster (o be of the controllable
pitch type, the other of fixed pitch l~pe
One new additional low voltage
Low voltuge switchboard,
switchboard for 450 VAC to be installed. The switchboard to
be divided in hvo parts separated by a bus-tie. One netv
additional low voltage stvitchboard for 230 VAC to bc
installed.
Transformer.v.
Four new additional transformers to be
installed 2 x 6300/450 VAC. 1500 K~a and 2 x 450/230 VAC.
Power GcncWion System
A nmv and additional power generation plant and distribution
system to be installed.
New additional generator diesel
Generator Diesel Engines.
engines to be installed in the extended deck box aft. Two new
compartments to be arranged ~vithIW’Odiesel engines in txch.
.Yumber ojerrgines:
(ea.):
Speed:
4
3100 kW
900 rpm
The diesel engines to be similar in layout and equipment to
the existing generator diesel engines.
(iwwtors.
New additional main gcncra[ors conncc[cd [o the
rrc~vdiesel engines to be installed.
.I’ulltber oJ generators;
4
I Wfage .4C:
6,3
Monitoring And Control Systems
!i)wtem.
A new
Monitoring und Control Duul Nehvork
monitoring and control sys[em to be installed and to comprise
the following functions: existing alarm, monitoring and
control system. additional al,arm and monitoring for new
machincr. a nc~v additiona] Potvcr Management Systcm
(PMS). ExccpI for the DP S!stcm, tbe new additional
monitoring control systcm and the existing system including
all existing controls in the engine control room to be
integrated into a new automation system.
Power Munugemcnt
System
The Power Management System
(PMS), to be integrated in the new monitoring and control
system, and to ensure adequate running generator capacity
reIative to power demand and to command automatically the
starl of a stand-by generator [o keep adequate spinning reserve
and on a second stage to execute load shedding and load
kV
60 Hz
1:)’lvplcncy:
power
10 be
Auxiliary systems
The thrusters to be of underwater mounted type. Each thrusler
[o be driven by an electric motor with speed control via a
frequency converler.
[’onltnuou,r
system
Four
each propeller:
Genera fur output
po!! m control
Cooling
Azimuthing thrusters
New additional azimuthing thrusters to be ins[alled in nc~v
thruster rooms located in the pontoons.
,\ ’umber oj thrusters:
with automatic
SPE 35296
ou[put
each approx k JGIx p,f:
4430 x 0.7
Spewf:
900
rpm
The generators to have similar characteristics as the existing
main generators and to be of brushlcss type, air cooled by a
closed circuit having a fresh water heat exchanger of marine
[ype, The generators to have Y-comection, each with
grounding resistor and two (2) embedded temperature sensors
in the stator winding. One 3 MVAr (approx.) synchronous
58
SPF 35?96
E L MEGALE VALE, E S DE MEDEIROS,
sh:iring opcratiou {0 limit the pou cr consumption [0 prcvcol
bklck-oul due to o~.crload The PMS to bc capable of starting
in case of failure of the first commanded,
aoothcr gcncmtor
The PMS to bc also capable to operate gcncmtors circuit
breakers and bus dc breakers
Ventilation
und Air Conditioning
ControL
The existing
ventilation and air conditioning control system to be increased
as required for the additional ventilation equipment for the
new engine, thruster and electrical rooms and for the
~dditiorral air conditioning equipment to ncw electrical rooms,
Fire & (ius Monitoring
arrd Con~ro/. The new engines,
thruslcrs, switchboard and electrical rooms to provided wiffl
fire and gas dc{ectors as required by the specified authorities.
Ballast Gmtroi $~.rtem. The existing ballast control system to
be modified with regard to the new ballast tank configuration.
TV und IOdeo Cumera.y, One set of cameras to be installed on
the Unit ‘and connected (o a set of TV displays to provide
images to [he DP operators in the wheelhouse from the
stralcgics sites
Conmwniculion
.S)I.tiem. Onc talk-back sys(cm to be installed
in whcclhousc to permit communication bct!vccn wheelhouse
and driller’s house, wheelhouse and engioc control room, and
t~Ilcclhouse ,and supcnntendcnt’s office.
f}{’ .SIUIU.SAlurm .~~.stmn. One audio-visual alarm systcrn to
be provided to infoml of the status of the DP system.
Nuvigufion
Equipment.
One new additional radar system of
“ARPA’ type [o be installed. The systcm to have the
possibility 10 show approaching }vcathcr fronts.
.Ytuhi[itv
Monitoring
und A dvisoqf
,Tjwlcnt
(SMAS).
A
s[ability monitoring and advisory sys[em, to be ins[alled and
to perform stability calculations and to monitor a set of data,
as dcscnbcd below, related to the most important stability
figures. The purpose of such s.ystcm is to get on-line
infomulion and to provide cross checking among measured
and prcdic[cd (calculated) values.
H’ork.rtutiorr. Besides the SMAS sof[ware. the tvorkstation in
Ihc u IICCII1OUSC
to comprise cornputcr and dcdicatcd printer.
A C NETO, P P RIBAS FERREIRA
Rt)P
UIId BOP control
5
,y~.vtcwf
Bop stack to bc con~crtcd for dcployn]cnt in
tvatcrdcp(lls Up to 1500 m without guide wires,
ROP control .~tx~mr. The BOP control systcm to bc modified
[o a mul[iplcx con[rol s! s[cm dimensioned for disconrtcction
[imc according to API-NPD. The pod umbilicals will be
clamped to the riser string. The emergency hydraulic/acoustic
LMRP disconnect system will bc rcplacedlmodilled Surface
control unit to have arrangement for connection of electronics
such as monitors and PC.
ROP stuck.
Murinc
Riser
The
und Riser
Ruck modiJcution.
riser string to support kill and choke lines, 15000 psi wp.
booster [inc. 3fNKlpsi wp and IWOhydraulic lines for BOP con
trol supply, 5000 psi wp all integrated on the joints. The riser
rack to bc modified and extended for storage of the risers
joints.
The
Additional Hull Equipment and Upgrading
ROWI Venti/ution
LON pressure fans to bc arranged
for ~cntilaiion of the ncw cogioc rooms Fans for new engine
rooms [o hm”c a capacity calculated according to Swedish
Standard 780725, One fan for each ncw engine room to be
rcicrsiblc for ctacuation of CO~
Engine
structural
upper hull from box bottom to upper
deck to bc cx[cndcd aft. Ncw engine and sJvitchboard rooms
10bc arranged in the new part
Column b/i,s/er.s. Each existing column blis[crs to bc
increased.
Di.spkwrwnt
lmxm. Each existing displacement box to be
iucrcmcd
Extenddd
(icckh ou.w.
The deckhouse containing the
~vheeihouse to bc increased to accommodate the new DP
control ccnler and electrical room
Thruster rooms. Foor new dmls[cr rooms lo be arranged in
Ihc pontoons as shown in the GA-drawing,
Deck box c~-~cvtsion The
Drilling Equipment Up-grading and Modificiliton
Tcwsimting
.~@ern.
TIc
cxisling riser tensioning
s! stcm to bc refurbished and up.graded to 8 x 100.000 Ibs and
in addition tlvo ncw tensioners to bc installed including idler
shca~cs. Jvirc and tvirc reels.
Conclusion.
The usc of the PETROBRAS-XXIII as a
comcrtcd DP-I 500 m oui[. besides of the relc~zmts market
aspects. Jvill provide (1IC Company ~rith a deeper
acknowledgement in the dynamic positioning tccnolo~.
essential for [oday ’s Brazilian deep wa[crs drilling program.
Ri.wr
59
6
CONVERSION
OF A SEMISUBMERSIBLE
DRILLING RIG TO A DP UNIT
SPE’35296
I
w“
0-3
L
L&3
Fig. 1- Cooling Water Diagmm for the New Diesel Engines (preliminary)
60
SPE 35296,
E.L. MEGALE VALE, E S DE MEDEIROS,
AC. NETO, P.P RIBAS FERREIRA
7
—
“-@-+–
—
I
I
--*
---@H
“-G)+
u
z
-=+”
1
i,-
I
L
Fig. 2- One-line Diagram (preliminary)
61
8
CONVERSION
OF A SEMISUBMERSIBLE
Fip. 3a:
Wird
27,5
m/s
Current
Wave height
1,41
m/s
7,8
m
Wave period
11,4
s
Thrusters
Current load on
riser included
DRILLING
SP E.35296
RIG TO A DP UNIT
DP Capacitv
Plot
-1
DP
1 year storm
Campos Basin
6 THRUSTERS
Petrobras-23
6
125
t
Iiiil
kN
o
❑
o
❑
o
+“?-”*
‘..&a.x’
m
62
“-
/’
\m
SI?E 35296
E L MEGALE VALE, E.S DE MEDEIROS,
Fig. 3.b:
Wind
Current
Wave height
Wave period
Thrusters
Current load on
riser included
A C. NETO, P.P RIBAS FERREIRA
DP Capacitv
Plot -2
21,2 m/s
Petrobras-23 DP
1,41
5,1
1 year storm
7,9
m/s
m
s
Campos Basin
7 THRUSTERS
7
125
kN
0
63
~--
Force (lcN)I
i—
Thrust(kN) I
9
10
CONVERSION
OF A SEMISUBMERSIBLE
DRILLING RIG TO A DP UNIT
Fip. 3.c: DP Capacity
Wind
Current
Wave height
Wave period
Thrusters
Current load on
riser included
21,2
1,41
5,1
7,9
mfs
m/s
m
s
SPE 35296
Plot -3
Petrobras-23 DP
1 year storm
Campos Basin
8 THRUSTERS
8
125 kN
+
IEil
1
o
0
0
❑
I
[ ----
l—
lea
64
Force (kN) ]
Thrust(kN) I
SW= 35296
E.L. MEGALE VALE, ES. DE MEDEIROS,
A.C. NETO, PP. RIBAS FERREIRA
Fig. 3.d: DP Capacity
Wind
Current
Wave height
Wave period
Thrusters
Current load on
riser included
27,5 mls
1,41 mis
7,8
m
11,4
s
Plot -4
Petrobras-23 DP
10 year storm
Campos Basin
7 THRUSTERS
7
125 kN
❑
+
0
M
❑
lea
65
0
11
12
CONVERSION
OF A SEMISUBMERSIBLE
DRILLING RIG TO A DP UNIT
SPE 35296
,—
Fig. 3.e: DP Ca~acitv
Wind
Current
Wave height
Wave period
Thrusters
Current load on
riser included
m/s
1,41 m/s
5,1 m
7,9 s
21,2
Plot -5
Petrobras-23 DP
10 year storm
Campos Basin
8 THRUSTERS
8
125 kN
o
66
SPE 35~6
.
E L MEGALEVALE,
E.S, DE MEDEIROS,
A.C. NETO, P.P. RIBAS FERREIRA
13
●
Table 1- Cost Estimate
. . .. ......
. . .: .,, . .
.,..,,.,
:.......,:,
,...,..,
1. DPCf3N~lHW31N
~;””” “:’
“’
1
3.300.000
1.1’.Structural Works
1,2. Auxiliary Systems
1.3. Power Generation. DP System.
.
. Promdsion
.
1.4. Shipyard Services
600,000
I
15.700.000
14;000;000
500,000
1.5. External Advisory,Traning
Sub-Total 1
2. DRIL?LING SYSTEM :~
3, MISCELWEOUS
~
z2@o,lxMi
:
Sub-Total 2
‘ “.
Sub-Total 3
8oll,NKl
..:”
~ ~:.,4. REPAIRS AND MMNTMSANCE$ERVICES
4.1.
5,400,000
1,000,000
3,000,000
200,000
Overhaul of Equipments
4.2. Hull Painting
4.3. Spare Parts and Contingence
4,4. Hull Special Survey
9,6000,000
Sub-Total 4
~~6,700,00
Contractor Administration
Fee (10%)
Basic Design
Transportation of the Unit
“
.
2,00WI0
2,0’00.000
I
TOTAL ]
67
77,800,000
CONVERSION
14
OF A SEMISUBMERSIBLE
DRILLING RIG TO A DP UNIT
Table 2- Environmental
10-yem
return period
21,22
9,5
10,3
5,1
11,1
7,9
1,41
10 rnin-wind speed (rds)
max wave height (m)
period max wave height (s)
signifkant wave height (m)
peak period sign wave height (s)
zero up-crossing period /ISSC(s)
surface current speed (m/s)
I
Conditions
l-year
CAMPOSBASfN
SANTOS BASIN
I
....- sr--,.
.--,
10 min-win~
~e~~ (mlcl
tnax wav~eheight (m)
hA,+t
(5)
,m.,.,,-.,=
wavw ,,~,g,
period m~a
+f.nh
I
I
—
-
Restricted
operation
,-
7Q
Offset Limit
Offset Limit
(%waterdepth)
1-Year
2°
3“
3
1O-Year
4°
6°
6
Environment
Angle
Heading
al load
68
return period
37,22
14,2
12,1
7,6
13,0
9,2
2,06
I
I
100-year
return period
?4
3
.>-
16,9
11,9
01
Limits
Riser/BOP
Max.
condition
Normal operation
lo-year
return period
275
14,5
I 1,4
I
I
Table 3- Operational
Operational
loo-yw
return period
29,23
11,8
11,2
6,3
12,0
8,5
1,71
I -year
return period
207
11,5
10,8
A9
--,
~Pl? 3$a6
Operation
remarks
Drilling
Riser
Comect d
I