Heuristic Algorithm for Target Coverage with
Connectivity Fault-tolerance Problem in Wireless
Sensor Networks
Nguyen Thi Hanh
Phan Thi Hong Hanh
Huynh Thi Thanh Binh
Nguyen Duc Nghia
School of Information and
Communication Technology
Hanoi University of Science
and Technology
Hanoi, Vietnam
Phuong Dong University
hanhnt0903@gmail.com
School of Information and
Communication Technology
Hanoi University of Science
and Technology
Hanoi, Vietnam
mliafol.phan86@gmail.com
School of Information and
Communication Technology
Hanoi University of Science
and Technology
Hanoi, Vietnam
binhht@soict.hust.edu.vn
School of Information and
Communication Technology
Hanoi University of Science
and Technology
Hanoi, Vietnam
nghiand@soict.hust.edu.vn
Abstract— Wireless sensor networks include a set of sensors
being network nodes and a base station. The objective of such
systems is to monitor changes which might occur at targets’
location. Consequently, assuring the network connectivity is
compulsory to maintain a continuous monitoring of given set of
targets. However, sensor nodes sometimes stop functioning due to
being physically damaged or running out of energy (battery),
thus affecting to the connectivity of the system. This paper
considers the target coverage with connectivity fault-tolerance
problem in wireless sensor networks. The goal of this problem is
to come up with a network topology consisting of the least
number of sensor nodes that not only offers the greatest target
coverage but also maintains the network connectivity even when
one random node is defected. This is an NP-Complete
combinatorial optimization problem. One heuristic algorithm is
proposed to solve the target coverage with connectivity faulttolerance problem and it is tested on 15 randomly generated
instances. Experimental results illustrate a good performance
achieved in terms of target coverage, connectivity and faulttolerance.
Keywords—Wireless Sensor Networks; Target Coverage in
WSNs; Fault-tolerance.
I. INTRODUCTION
In recent years, Internet of Things (IoT) has gained the
attention of many world-leading researchers and companies.
IoT has become the cornerstone of the technology
development in this modern world. However, the impetus
behind its success is the involvement of Wireless Sensor
Networks (WSNs), which are playing an crucial role in
monitoring, collecting and exchanging information in order to
perform given tasks. Moreover, WSNs themselves emerge in
many applications in real life such as disaster forecasts,
intelligent transportation, manufacturing management, security
and health care.
WSNs are formed by a large number of sensor nodes, each
of them is equipped with one or many sensors capable of
detecting and measuring physical variables such as light,
978-1-5090-5732-0/16/$31.00 ©2016 IEEE
temperature, pressure, noise, etc. in a certain sensing range.
One weakness of WSN system is that nodes’ operation
consumes energy from a limited power source (battery), which
is hard to recharge or replace when being used up. Collected
information are then exchanged between nodes or sent to the
base station. Thus, WSN systems are considered as a
revolution in information collecting and communication with
high reliability and large signal transmission lines supported.
However, there are many challenges that WSNs have to face
besides the energy problem, including sensor nodes’ fragility,
data transmission handling, limited coverage, connectivity
assurance and network fault-tolerance. In reality, WSNs are
mostly deployed in harsh environmental conditions and
terrains where people can hardly reach; thus, making it harder
to perform system maintenance.
According to in-depth surveys on the field [1], coverage,
connectivity and fault-tolerance in WSNs are major
optimization problems.
As for coverage criterion, the coverage of sensor nodes is
decided by its radius whose magnitude depends on the
configuration of each individual sensor after manufacture.
There are three types of coverage problems including target
coverage, area coverage, and barrier coverage. This paper
considers the target coverage, which illustrates how well a set
of given targets is monitored. Consequently, it is expected to
cover each target by at least one sensor node. Similarly, the
quality of WSN systems depends on its connectivity, such that
information about a target is transmitted to the base station
successfully in every cycle. The network connectivity depends
primarily on the deployed topography of nodes in the network.
Meanwhile, the fault-tolerance becomes an essential criterion
in WSNs when it comes to the need of maintaining the work
of WSNs in certain condition and continuous period, because
fault sensors cannot be replaced immediately during the
network operation. Fault-tolerance is defined as the ability to
complete the task of WSNs even if some sensor nodes are
defected.
235
TAAI2016
In this paper, we propose solutions to find the minimum
number of sensor nodes deployed in a given area satisfying the
maximum coverage and connectivity for the WSNs.
Additionally, the fault-tolerance is achieved such that the
transmission capacity of the WSNs is maintained when a
random sensor node stops functioning.
The paper includes six sections. Section 1 introduces the
introduction to WSNs and the demand of resolving the
problem of target coverage with connectivity fault-tolerance.
Sections 2 and 3 respectively present related works and
formulate the problem in form of mathematics equations. The
proposed heuristic algorithm is discussed in details in section
4, and its evaluation according to the experimental results is
shown in section 5. Finally, the conclusions and expected
future progress for this paper will come in the last section.
II. RELATED WORKS
Coverage is considered as one of the most important
factors contributing to the quality of WSN systems. Thus,
coverage maximization problem has been extensively
investigated, and as a result, many researches have been
conducted to this topic.
According to a survey over WSNs conducted by Bang
Wang [1], the coverage problems can be divided into three
groups: (1) target coverage problems, (2) area coverage
problems and (3) barrier coverage problems. This paper
investigates the target coverage problem. One of the most
concerning target coverage problems is to minimize the total
number of sensor nodes such that a full coverage is guaranteed
on given targets (also called as objects). This problem has
been tackled using a variety of methods, such as greedy
algorithms, genetic algorithms and so on [1].
Besides, the problems of coverage maximizing and
network lifetime lengthening combined with connectivity
constraints were widely studied as well. The connectivity is
referred to the ability to communicate between sensor nodes.
Two sensors can transmit and receive data with each other
when the distance between them is less than its radius.
One typical target coverage problem is to find the
minimum number of sensors in order to cover all the targets.
This problem is solved using various methods such as greedy
algorithm or genetic algorithm [1]. Apart from the abovementioned problem, the authors also suggested models for
problems of network lifetime maximization that guarantees the
coverage and connectivity constraints. A famous problem for
the connected target coverage problem is the MCT problem
(Maximum Cover Tree) which uses a tree to represent a subset
of active sensors. The MCT problem is NP-complete [4] and
some heuristic algorithms were proposed to solve the MCT
problem by setting up an alternative path for data
transmission, which brings in the fault-tolerance to the system
[4], [5].
Some of the connected target coverage problem is to
enforce k1-coverage and k2-connectivity requirements such
that every target is covered by k1 different active sensors, and
such active sensors can form a k2-connected network. Li et al.
proposed a heuristic algorithm to solve this problem in [6].
However, when the sensors positions are given, both the
number of targets and the number of sensors used are very
small, which was not very practical. In the larger domain with
a great amount of targets, having a more efficient algorithm is
necessary to solve this problem.
A model of a connectivity-guaranteed target coverage
problem was also suggested in [3]. In this model, two sensors
can communicate with each other when the distance between
their locations is less than or equal to the sensor radius. This
sensing model is utilized in this paper.
In conclusion, the target coverage with connectivity faulttolerance problem has been investigated in [6]. However, the
input size was small in term of the number of sensor nodes
and targets and the placement location for nodes are
predefined. This paper approaches the problem differently and
works on larger input datasets. Specifically, the number of
sensor nodes needed as well as their positions are not given.
Our objective is to maximize the target coverage using the
minimum number of sensor nodes while guaranteeing the
connectivity fault-tolerance of the system.
III. PROBLEM FORMULATION
In this paper, we will apply the Boolean disk coverage
model. Assuming that target is a point in 2D domain and every
node is a sensor with same radius R, we have the formula
describing the transmission ability of sensor to target as
follow:
­1, if d ( s, z ) ≤ R,
f ( s, z ) = ®
¯0, otherwise,
(1)
where d(s, z) is the Euclidean distance between the sensor s
and the target z.
Meanwhile, it is assumed that the communication range of
all sensors is 2×R. A sensor or base station s can receive or
retransmit data from others s’ if the Euclidean distance
between s and s’ is less than or equal to 2×R. Determine a
function g(s, s’) by the following formula:
­1, if d ( s, s ') ≤ 2 × R,
g ( s, s ') = ®
¯0, otherwise.
(2)
Considering a set of sensor nodes and a base station placed
on the 2D domain A with A = {( x, y ) : 0 ≤ x ≤ W ; 0 ≤ y ≤ H } .
Let G = (V, E) be a graph with vertices set V = {B, s1 ,..., sn }
and edge set E represents the connection link among the base
station and sensor nodes. The base station is labeled as B and
si (1 ≤ i ≤ n) is a label for the i th sensor. There exists an edge e
∈ E connecting from a to b if and only if g ( a , b) = 1; a , b ∈V .
Thus, an information is able to be transmitted from target t
to base station if there is a path P = ( si1 , e1 , si2 , e2 ,..., sim , em , B )
in graph G where si j ∈V \ {B} and ej is edge connecting si j and
236
si j+1 ( si j+1 = B ) and f ( si1 , t ) = 1 .
Let
P = (sv1 , e1 , sv2 , e2 ,..., svm , em , B)
and
Q = (sv, ' , e1' , sv' , e2' ,..., sv' , e'p , B)
1
2
p
be the two traverse paths from target t to the base station.
These two paths are defined as distinguishable if and only if
vi ≠ v 'j , ∀i :1 ≤ i ≤ m, ∀j :1 ≤ j ≤ p.
Now, the problem can be formulated as follows.
Input:
• W, H are the width and height of the 2D domain
A.
• n is the number of targets which we want to
collect information.
• T = ( xi , yi ) 0 ≤ xi ≤ W , 0 ≤ yi ≤ H , i = 1..n} is
{
the 2D coordinates of n targets.
R is the sensing radius of all sensors.
B(xB , yB ): the 2D coordinates of the base station
(0 ≤ x B ≤ W,0 ≤ y B ≤ H ) .
Output: 2D coordinates of all n sensors and the total
number of sensors used.
Objective: The objective being to minimize the number of
sensors with their coordinates on domain A such that there
are distinguishable paths to send information about each
target in T to the base station.
Figure 1 illustrates the target coverage model with targets
located randomly on the domain A, sensor nodes and a base
station.
•
•
Fig.1. Illustration for target coverage model
IV. PROPOSED ALGORITHM
This paper proposes a heuristic algorithm including two
phases for solving the main problem. The first phase aims at
finding the smallest number of sensors to cover the target set
while the second one assures the connectivity with faulttolerance to the given targets.
A. Finding the smallest number of sensors to cover the target
set
To be specific, the objective of this phase is to find SSCAT
(Sensor Set Covering All Targets), which comprises a base
station and a sensor set placed in a 2D domain A with the
minimum number of sensor such that each target is covered by
at least one sensor. In order to simplify the problem, it is
assumed that the coordinates of the sensors on the domain A
are integers. This algorithm starts with finding sensors’
location on A such that each target is covered by at least one
sensor of this set. This is a set cover problem.
Denote T as the set of targets and F as the set of all
positions at which sensors can be placed. In other words, F is
the set of all integer points on domain A. With a
position f ∈ F , CVf is a set of all targets covered by a sensor
placed at f. The set cover problem can be defined as
finding SSCAT ⊂ F with the minimum size, making sure
that T = * f ∈SSCAT CV f .
Due to being narrowed down to an NP-complete set cover
problem, the target coverage maximization problem
investigated in this phase is also NP-complete. The greedy set
cover algorithm see e.g. [2] will solve this problem in
polynomial time, and often gives a good result.
After covering all given targets by at least one sensor node
in SSCAT, the objective is to enhance the fault-tolerance of the
target monitoring process by letting at least 2 sensor nodes
cover on each target. Doubling the set is the simplest way to
accomplish it in this case, and this method has been widely
used with regards to small and medium number of targets [2].
Hence, we double the sensor set in SSCAT, resulting in
SSCAT’.
However, sensor nodes in this set are not yet connected. In
other words, information about targets cannot be sent to the
base station. When the algorithm proceeds to the second
phase, some sensor nodes will be added so as to guarantee the
connectivity of the network including the base station. In
addition, additional sensors are placed such that they form
backup paths in the WSN that could be utilized when one
random node is dead.
B. Assuring the connectivity with fault-tolerance to the given
targets
The fault-tolerance in WSNs is the ability to bear dead
nodes in the network. To be specific, when some nodes stop
functioning, the network still operates as usual. This paper
considers the case when one random node is dead, backup
routing path is utilized and the system operation is maintained.
The following part presents the second phase of the
algorithm, which aims at assuring the connectivity with faulttolerance to the WSN by producing two paths between any
nodes to the base station.
This phase takes the input as the sensor node set derived
from the first phase and the base station as one separated node.
The idea of this phase is to form a connected path from the
given input sensor node set such that there always exist two
paths between any two nodes. Because the base station
registers as a part of the graph, the connectivity fault-tolerance
is achieved.
This phase includes three steps as follows.
• Clustering SSCAT’.
• Building a complete graph from clusters in step 1.
• Minimizing FS (Final Solution).
More details of these steps can be found in the following part.
1) Clustering SSCAT’
An un-weighted undirected graph G1 = (V1 , E1 ) with V1
being the set of vertices, and each vertex represents one sensor
in SSCAT’. E1 is the edge set, and there exists an edge
237
between two vertices u and v if and only if g (u , v) = 1 . The
mission of this part is to find all connected components of G1.
The distance between two connected components is defined as
follows.
Dis ( X , Y ) = min( d ( nodeX , nodeY ) ,
with ∀nodeX ∈ X , ∀nodeY ∈ Y .
After that, a weighted graph G2 = (V2 , E2 ) is built with
each vertex of V2 representing a connected component of G1
and E2 = {( X , Y , c) | X ∈ V2 , Y ∈ V2 , c = Dis( X , Y )} . Let n
(1 ≤ n ≤ V1 ) be the number of connected components of G1,
the function Connect (i ), (i ∈ V1 ) returns the index of the
connected
component
that
contains
the
vertex
i (1 ≤ i ≤ V1 ≤ Connect (i ) ≤ n ) . The below pseudo code
explaining the process of building graph G2 from the graph G1
is presented below, in which the weight of the edge connecting
X and Y is cost[X , Y ] .
a) USP algorithm
USP algorithm uses Kruskal’s minimum spanning tree
algorithm to find graph G’.
Firstly, Kruskal’s algorithm is used to find the minimum
spanning tree T1 of the graph G2. After that, we add all edges
of T1 to E’. A complete graph H with the vertex set containing
all leaf nodes of T1 is constructed. The weight of the edge
between two vertices of H is the Euclidean distance between
two correspondent sensors.
Then, Kruskal’s algorithm is applied again to find the
minimum spanning tree T2 of H. Adding all edges of T2 to E ' ,
obtain graph G ' = (V2 , E ') that we need to find.
b) UTSP algorithm
UTSP algorithm will find a minimum single cycle which
goes through all vertices. It can be easily seen that this is a
travelling salesman problem. In this research, genetic
algorithm will be exploited to solve the TSP problem
presented in [4] with the following parameters in table I.
TABLE I.
Algorithm: GRAPH CLUSTERING ALGORITHM
Parameters
Input: An un-weighted, undirected
graph G1 = (V1 , E1 )
and all connected component of G1 .
Output: A weighted undirected graph G2 which a
vertex
presents for a connected region of G1 .
Begin
1. for X = 1 to n
for Y = 1 to n
if X ≠ Y cost[ X , Y ] = ∞
else cost[ X , Y ] = 0
2.
for i = 1 to V1
3.
4.
5.
6.
7.
8.
9.
for j = 1 to V1
begin
X = Connect (i )
Y = Connect ( j )
cost[X, Y] = min(cost[X, Y], d (i, j ))
end
V2 = { X 1 ≤ X ≤ V1 }
PARAMETERS
Value
Population size
300
Generation number
200
Crossover probability
0.8
Mutation probability
0.8
Adding all edges of the cycle to E’, obtain
graph G ' = (V2 , E ') that we need to find.
With ∀e = ( X , Y , c) ∈ E ' , we place sensors on the line that
connects X and Y, making sure that sensors of two connected
components X and Y can transfer information to each other.
Denote the newly added sensor set as SSFTP (sensors set
for two paths). Let FS = SSCAT '∪ SSFTP be a sensor set
satisfying the original problem constraints.
After finding G1 = (V1 , E1 ) , with each e = ( X , Y , c ) ∈ E ,
more sensors will be placed on domain A to connect the
connected components together. Let u, v ≤ V1 be two vertices
of G1, satisfying that:
­Connect (u ) = X
°
(3)
®Connect (v) = Y
°cost[ X , Y ] = d (u , v)
¯
10. E2 = E2 ∪ { X ,Y ,cost[X,Y])} ∀X ∈ V2 ,Y ∈ V2
11. return G2 = (V2 ,E2 )
End
2) Building fault-tolerance property.
Based on G2, we build G ' = (V ', E ') , where
V ' = V2 ,, E ' ⊂ E2 and E’ made sure . There always exists two
paths having no common vertices on G’ starting from v to
Base Station.
Two algorithms applied in this step named USP (using
spanning tree) and UTSP (using travelling salesman problem)
to construct a connected tree are presented in the following
part.
With two sensors u and v, more sensors are placed on the
domain so that these two sensors can be connected to each
other. On the line that connects two positions at which two
sensors are located, place a sensor which is 2×R far from u.
Next, place one more sensor that is 2×R far from the previous
sensor, and repeat the task until the Euclidean distance
between the newly placed sensor and v is less than or equal to
2×R.
3) Minimizing FS
Though FS satisfies the original problem constraints, it still
contains redundant sensors. Therefore, this step is to eliminate
those sensors. After that, the final solution is achieved.
Considering all the sensors u ∈ FS , FS ' = FS − {u} , if FS '
satisfies the constraints of the problem, let FS = FS ' .
238
In this step, the definition of bi-connectivity is utilized to
check whether FS ' satisfies the constraints of the problem or
not [3].
In conclusion, when an arbitrary sensor u is eliminated, the
information of all targets can still be transferred to the base
station because there are always two paths without a common
vertex to transfer the information of all the targets to the base
station.
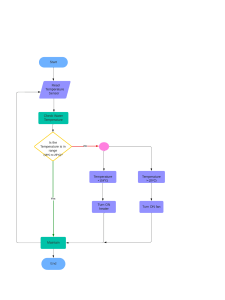
Figure 2 illustrates the proposed heuristic algorithm including
both phases; in which red dots represent targets, green circles
and the red triangle are respectively the coverage area of
sensor nodes and the base station and the black boxes illustrate
connected components appeared in step 1.
a)
The experimental program was implemented in Java
language and run on machine with Intel core i5 2.4GHz, Ram
4G, Window 10 ultimate.
B. Computational Results
Table III illustrate the solutions derived by the proposed
heuristic algorithm using USP and UTSP respectively in the
second step of the second phase in terms of number of sensors
used and execution time averagely in 15 running times over 15
instances with n being the number of sensors and R being their
sensing range. Figure 3 shows the solution found by applying
the proposed heuristic algorithm on instances S1-3 and on
instances S1-8, in which red dots being targets, green circles
and the red triangle represent the coverage area of sensor
nodes and the base station respectively.
b)
(a)
(b)
(c)
(d)
d)
c)
Fig.2. Illustration for the proposed heuristic algorithm: a) Finding SSCAT; b)
Clustering SSCAT’; c) Building graph G’; d) Find the complete sensor set.
V. EXPERIMENTAL RESULTS
A. Experimental settings
This paper experiments the heuristic algorithm on 15
randomly generated instances with the following parameters.
• The dimension of domain A is 200 x 200.
• The coordinates of targets and base station are integers.
• Amongst 15 instances, each 5 of them have the sensor
radius of 3, 8 and 12 respectively. The number of targets
is increased within each value of radius.
Information about all instances is shown in table II.
TABLE II.
EXPERIMENTAL INSTANCES
Instance
no.
n1
r1
Instance
no.
n2
r2
Instance
no.
n3
r3
S1-3
S2-3
S3-3
S4-3
S5-3
50
100
200
500
1000
3
3
3
3
3
S1-8
S2-8
S3-8
S4-8
S5-8
50
100
200
500
1000
8
8
8
8
8
S1-12
S2-12
S3-12
S4-12
S5-12
50
100
200
500
1000
12
12
12
12
12
Fig.3. The solutions found by applying the proposed heuristic algorithm that
uses USP on instances S1-3 and S1-8 are shown in figures (a, b), while that of
the version utilizing UTSP are shown in figures (c, d) respectively.
As for comparing two versions of the algorithm, the
number of sensor is the foremost criterion. Experimental
results show that the version of proposed algorithm that
utilizes UTSP outperformed the other one using USP with
respect to instances having small sensing range. In the first 5
instances having smallest sensing range (R = 3), the heuristic
algorithm using UTSP requires at most 10% fewer sensors
compared to the other one. However, the performance of the
heuristic utilizing UTSP tends to be worse than that of the
USP version when the instance size increases. To be specific,
the proposed algorithm that uses USP outperforms the other
one on 5/6 instances having large size (the number of sensors
being 500 or 1000).
When it comes to execution time, the heuristic that uses
UTSP performs up to 80% better than the one using USP over
5/5 instances with small sensing range of 3. When the sensing
range increases, the former consumes slightly longer execution
time than the latter one does, which is around 15% averagely.
239
Figure 4 illustrate the execution time consumed by the
proposed heuristic algorithm with respect to two techniques
used in the second phase USP and UTSP.
VI. CONCLUSION
TABLE III.
EVALUATING THE PROPOSED HEURISTIC ALGORITHM IN
TERMS OF NUMBER OF SENSORS AND EXECUTION TIME OVER 15 INSTANCES
USP
Instance no.
S1-3
S2-3
S3-3
S4-3
S5-3
S1-8
S2-8
S3-8
S4-8
S5-8
S1-12
S2-12
S3-12
S4-12
S5-12
Num. of
sensors
260
385
576
898
1262
110
152
199
292
377
69
105
124
162
210
This paper aimed at solving the target coverage
maximization with connectivity fault-tolerance problem by
specifying a proper network topology. One heuristic algorithm
is proposed to find a sensors’ placement scheme with the
largest target coverage and is able to maintain the network
connectivity even when one random node is dead. Two
techniques applied in the second phase of the heuristic
algorithm called USP and UTSP lead to two version of the
proposed algorithm. They were experimented over 15
randomly created sensor node sets and the experimental results
show that the formulated problem was resolved using the
proposed algorithm with fairly good performance.
In future, we plan to improve the algorithm targeting at
consuming fewer sensors and shortening running time.
Besides, the problem will be investigated with other practical
constraints such as energy and lifetime.
UTSP
Time (s)
2.514
5.718
27.003
46.396
126.934
0.339
0.704
1.918
6.234
14.484
0.227
0.430
1.007
3.218
9.850
Num. of
sensors
236.73
351.00
543.33
890.40
1270.07
101.60
147.53
200.73
292.60
378.00
67.53
104.67
125.33
166.00
210.00
constant, the result tends to be worse as the genetic algorithm
has lower convergence speed. Meanwhile, the running time of
UTSP algorithm is better on almost instances.
Time (s)
0.686
1.653
5.675
26.107
75.713
0.328
0.763
1.685
6.079
15.735
0.228
0.526
1.084
3.477
14.410
ACKNOWLEDGMENT
This work was supported by the project “Coverage
optimization in wireless sensor networks with obstacles”
funded by Hanoi University of Science and Technology, under
grant number T2016-PC-051.
REFERENCES
[1]
[2]
[3]
[4]
Fig.4. The execution time consumed by the proposed heuristic algorithm
with respect to two techniques used in the second phase USP and UTSP.
With each value of radius, when the number of targets
increases, the USP algorithm delivers the better results than
UTSP algorithm does. This is reasonable because when using
genetic algorithm for finding the minimum weight single
cycle, increasing the size of problem while maintaining the
same number of generation and the size of population is
[5]
[6]
240
Bang Wang, “Coverage problems in sensor networks: A survey”, ACM
Computing Surveys (CSUR), vol. 43(4), pp. 51-95, 2011.
Cormen, T.H., Leiserson, C.E., Rivest, R.L., Stein, “Introduction to
Algorithms”. 2nd Edition. MIT Press, Cambridge, 2001.
Kar, K., Banerjee, “Optimal multicast routing protocol for wireless
sensor networks”. Node placement for connected coverage in sensor
networks. In: International Symposium on Modeling and Optimization
in Mobile, Ad Hoc and Wireless Networks (WiOpt), 2003.
Zhao, Q., Gurusamy, M., “Lifetime maximization for connected target
coverage in wireless sensor networks.”, IEEE/ACM Transactions on
Networking 16(6), pp. 1378–1391, 2008.
Zhao, Q., Gurusamy, M., “Maximizing network lifetime for connected
target coverage in wireless sensor networks. In: IEEE International
Conference onWireless and Mobile, Networkingand Communications
(WiMob), pp. 94–101, 2006.
Li, D., Cao, j. Liu, M., Zheng, Y, “K-connected target coverage in
wireless sensor networks”. In: The 1st International Conference on
Combinatorial Optimization and Application (COCOA), also in LNCN,
vol 4616, pp. 20-31, 2007.