IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 71, NO. 8, AUGUST 2022
8729
A Compressive Sensing and Deep Learning-Based
Time-Varying Channel Estimation for FDD Massive
MIMO Systems
Jiancun Fan , Senior Member, IEEE, Peizhe Liang, Zihan Jiao, and Xiaodong Han
Abstract—To achieve the performance gains of massive multipleinput multiple-output (MIMO) systems, the downlink channel state
information (CSI) must be acquired at the base station (BS). In
frequency division duplexing (FDD) massive MIMO systems, the
BS always first transmits downlink pilot symbols so that the user
equipment (UE) can estimate CSI and then feedback to the BS.
However, the huge number of antennas at the BS will lead to overwhelming feedback overhead. Moreover, time-varying caused by
high mobility of user terminals makes the priori channel knowledge
of the channels to change from one slot to another so that CSI
aquisition is hard. To simultaneously reduce the overhead of overwhelming downlink pilot signaling and uplink feedback in timevarying massive MIMO systems, we propose a channel estimation
scheme based on compressive sensing (CS) and deep learning (DL)
in frequency division duplexing (FDD) massive MIMO systems.
Specifically, we first develop a new CS-based algorithm for sparse
channel estimation, which requires no priori knowledge of channel
statistics. After obtaining the innitial channel estimation, we utilize
two DL-based networks, named DnNet and DnLSTM respectively
for denoising. Simulation results demonstrate that the proposed
method can considerably reduce the training and feedback overhead and outperform the existing classical algorithms.
Index Terms—Channel training and feedback, compressive
sensing, deep learning, FDD, massive MIMO.
I. INTRODUCTION
ASSIVE multiple-input multiple-output (MIMO) has
been viewed as a key technology for the fifth-generation
(5G) wireless communication systems due to its huge performance gains in terms of capacity and reliability [1]. To achieve
these performance gains of massive MIMO, the downlink channel state information (CSI) has to be acquired at the base station
(BS) [2]. In time-division duplexing (TDD) systems, channel
reciprocity is usually used to obtain the downlink CSI, but it
requires accurate calibration of hardware circuitry with high
M
Manuscript received 19 February 2021; revised 25 October 2021 and 18
February 2022; accepted 10 April 2022. Date of publication 20 May 2022; date of
current version 15 August 2022. This work was supported in part by the National
Natural Science Foundation of China under Grant 61671367 and in part by the
Research Foundation of Science and Technology on Communication Networks
Laboratory. The review of this article was coordinated by Prof. Namyoon Lee.
(Corresponding author: Jiancun Fan.)
The authors are with the School of Information and Communications Engineering, Xi’an Jiaotong University, Xi’an, Shaanxi 710049, China (e-mail: fanjc
0114@gmail.com; peizhel@stu.xjtu.edu.cn; 1413564217@qq.com; hxd13414
71413@stu.xjtu.edu.cn).
Digital Object Identifier 10.1109/TVT.2022.3176290
cost [3]. In frequency-division duplexing (FDD) systems, the
reciprocity of the uplink and downlink channels does not hold
yet, hence the users have to estimate the downlink CSI first
and then feed it back to the BS [4]. Fortunately, it doesn’t
require complexity hardware calibration. Meanwhile, the traditional cellular system mainly works in FDD mode. Therefore,
FDD massive MIMO is a very popular topic in academia and
industry. However, FDD massive MIMO will result in a huge
overhead of channel acquisition because the large-scale antennas
are exploited at the BS. Especially, the time-varying fading of
the channel will further increase the complexity of the channel
acquisition. For the traditional methods, such as least-square
(LS) or minimum mean-squared error (MMSE) algorithms [5],
the required number of pilots always scales linearly with the
number of BS antennas. To address this issue, compressive
sensing (CS) has been widely applied in the channel estimation
of massive MIMO so that the sparse CSI is recovered from a
reduced number of received pilots [6], [7]. However, they cannot
work well in the time-varying channel scenarios when considering the cost of channel estimation and feedback. Therefore, it
is necessary to study the channel training and feedack scheme
in FDD massive time-varying MIMO systems.
Although the channel is time-varying, its statistical characteristics are often stable, thus the previous estimated information
can be used in current estimation to track the time-varying
characteristic of channel [8]–[11]. Especially, the stable statistical characteristics will result in the channel sparsity in some
domain so the compressive sensing (CS) technique can be used to
estimate the channel. In [8], a CS recovery approach is proposed
to estimate the time-varying channel by using priori support
information, and it also shows that the training signals could
be further reduced by using the temporal correlation. In [9],
the temporal correlation of time-varying channels is further
exploited to propose a differential-based structured compressive
sampling matching pursuit (S-CoSaMP) algorithm to acquire
CSI. The above methods depend on the priori knowledge of
channels, i.e. the correlation of channel as well as the sparsity
of channel. In [10], a distributed compressed sensing (DCS)aided channel estimation approach is proposed to fully exploits
slow variation of the channel statistics in consecutive time slots
and spatially common sparsity within multiple subchannels in
the frequency-domain. In [11], a feasible downlink training
sequence design approach based on a partial CSI estimation
0018-9545 © 2022 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission.
See https://www.ieee.org/publications/rights/index.html for more information.
Authorized licensed use limited to: The Islamia University of Bahawalpur. Downloaded on November 05,2022 at 20:48:54 UTC from IEEE Xplore. Restrictions apply.
8730
IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 71, NO. 8, AUGUST 2022
is proposed for an FDD massive-MIMO system with a shorter
coherence time. However, the above estimation schemes have
critical requirements to the priori channel information.
In [12]–[16], several channel estimation schemes without
the priori channel information have been proposed. In [12]
and [13], adaptive step size sparsity adaptive matching pursuit
(AS-SAMP) and orthogonal matching pursuit algorithm with
unknown sparsity (OMP-US) are proposed for sparse channel
estimation when the number of non-zero coefficients is unknown. In [14], an adaptive channel estimation and feedback
algorithm with low overhead for OFDM system is proposed,
which can adaptively adjust the training overhead and pilot
design for reliable CSI estimation. Compared with the method
of M-SP in [8], [15] proposes an adaptive M-SP approach which
could adaptively adjust the prior channel support quality parameter to the appropriate value in the case of model mismatch.
In [16], an approximate message passing algorithm based on
expectation-maximization and Gaussian-mixture distribution is
proposed, which can simultaneously learn the signal distribution
and recover the signal. However, all approaches based on CS
have one drawback that the noise added on the non-zero elements
is hard to eliminate. Therefore, it is necessary to find a better
method to eliminate noise after using CS-based estimation.
Recently, deep learning (DL) methods have been successfully
applied in wireless communications [17]–[28], especially for
the part of channel estimation and feedback. An autoencoderbased network, named CsiNet, has been designed for the CSI
feedback. Specifically, the encoder compresses CSI at the user
equipment (UE) and then the decoder at the BS reconstructs
the channel matrix from the compressed representation [17].
Further more, an improved network, CsiNet+, further improves
the performance of CsiNet by enlarging the convolutional kernel
size [18]. In [19] and [20], two RNN networks are proposed to
improve the feedback accuracy of CSI in Massive MIMO systems. In [21], a convolutional long short-term memory (LSTM)
network (ConvLSTM-net)-based method has been proposed to
predict the downlink CSI from the uplink CSI. By exploiting the correlation of time-varying channels, a convolutional
neural network (CNN) and a recurrent neural network (RNN)
in [22] extracts the spatial features and interframe correlation,
respectively. Combining the CS-base and DL-based method, a
framework, in [26], named CS-ReNet, compresses the perfect
CSI at the user side and then reconstructs the CSI at the BS
by utilizing deep neural network. A joint convolution residual
network in [27] can benifit the MIMO channel feature extraction and recovery from the perspective of bit-level quantization
performance. Considering the high mobility environments, [28]
develops a channel estimation network, which consists of a CNN
for mimicing the interpolation processes of frequency-domain
and a bidirection LSTM (BiLSTM) network for time-domain
channel prediction. Except the aforementioned data-driven approaches, there are also some model-driven deep learning approaches to obtain CSI. In [29], a fully convolutional denoising
approximate message passing (FCDAMP) algorithm is proposed
by combining fully convolutional denoising networks (FCDNet)
with learned approximate message passing (LAMP) networks
in millimeter-wave (mmWave) massive MIMO system. A dualdriven network with data and models is formed to retain the
excellent characteristics of FCDNet and LAMP to further reduce
the training information and improve the performance.In [30],
a model-driven deep learning (MDDL)-based channel estimation and feedback scheme is proposed for wideband mmWave
massive hybrid MIMO systems, where the channels’structured
sparsity from an a priori model is first used and then learn
the integrated trainable parameters from data samples. However, these above algorithms don’t eliminate the noise in the
channel estimation and don’t reduce the estimation complexity
by taking advantage of the time-varying characteristics of the
channel.
To solve the above problems, we propose a CS and DL-based
channel estimation scheme for FDD massive MIMO systems,
which simultaneously reduces the overhead for downlink training and uplink feedback and improve the channel estimation
accuracy in the time-varying channel. In the scheme, the users
directly feedback the received pilots to the BS first, and then the
channel matrices are reconstructed using a CS-based method,
named adaptive structured orthogonal matching pursuit (ASJOMP), and two DL-based methods, named DnNet as well as
DnLSTM. Specifically, we first develop on AS-JOMP algorithm,
which could adaptively reconstructe the channel by exploiting its
structured sparsity without using the knowledge of the number
of non-zero elements in CSI. The structured sparsity is caused
by the tight arrangement of antennas at the base station which
makes the signals experience similar paths. After obtaining
the initial estimation of CSI, aiming at the problem that the
preliminary CSI could not effectively eliminate the noise adding
at the position of non-zero elements and did not make full
use of the effective information between time-varying channels, we propose two network models based on deep learning,
namely DnNet network based on multi-layer CNN and DnLSTM network based on a small number of layers CNN and
LSTM network, to further improve the accuracy of the final
CSI estimation. As is well-known, DL-based methods usually
have high computing cost during training stage because of the
large model sizes. In this article, we use a lightweight DNN,
which has a lighter architecture than others for noise reduction
and only needs two hundreds epochs to train. The proposed
channel estimation scheme avoids the complex computations at
power-limited users for channel estimation and CSI projection,
which not only relieves the computational burden for the user
devices but also reduces the cost of feedback. We analyze the
CSI quality at the BS in terms of the normalized mean-squared
error (NMSE). Simulation results demonstrate that the proposed
method outperforms the existing classical algorithm. The main
contribution of this article is summarized as follows:
1) We propose a channel estimation scheme based on CS
and DL for FDD massive MIMO systems, which simultaneously reduces the overhead for downlink training and
uplink feedback and improve the estimation accuracy. In
this scheme, we first send the received pilots from the UE
to the BS, and then reconstruct the channel matrices by
using the method based on CS and DL.
Authorized licensed use limited to: The Islamia University of Bahawalpur. Downloaded on November 05,2022 at 20:48:54 UTC from IEEE Xplore. Restrictions apply.
FAN et al.: COMPRESSIVE SENSING AND DEEP LEARNING-BASED TIME-VARYING CHANNEL ESTIMATION FOR FDD MASSIVE MIMO SYSTEMS
8731
The recieved symbol, y, at the time-domain can be expressed
as
y=
N
BS
hi ∗ xi + n,
(2)
i=1
Fig. 1.
where hi ∈ C L×1 is the CSI from the ith BS antenna to the
user as described in Section II, L is the length of channel, n ∈
C Nc ×1 denotes the independent and identically distributed (i.i.d.)
additive white complex Gaussian noise (AWGN) with zero mean
and variance, ∗ denotes convolution operation, which can be also
expressed as the matrix multiplication.
If the OFDM system is with a cyclic prefix of a proper length,
then the linear convolution in (2) will turn into the circular
convolution after removing the cyclic prefix at the receiver. We
use proper zeros-padding (ZP) for hi , the convolution operation
will be
comb-type pilots.
2) We propose an adaptive structured orthogonal matching
pursuit (AS-JOMP) algorithm, which adaptively reconstructs the sparse channel by exploiting the structured
sparsity of wireless MIMO channels and requires no prior
information about the sparsity of the time-varying channel.
3) We utilize two DL-based methods, DnNet and DnLSTM
networks, trained by training set and verification set to denoise and learn the characteristic of the time-varying channel, which makes the system performance better when the
signal-to-noise ratio (SNR) or the training overhead is low.
The rest of this article is organized as follows. Section II
provides the system model. Section III develops CS-based ASJOMP for CSI estimation and two DL-based methods, DnNeT
and DnLSTM, for denoising. In Section IV, simulation results
are presented and finally Section V concludes this article.
II. CHANNEL MODEL
We consider a massive MIMO OFDM system operating in the
FDD mode. In this system, there are NBS antennas equipped at
the BS and K scheduled single-antenna users. In this article,
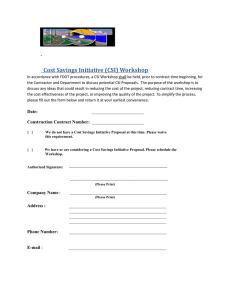
we adopt a comb pilot scheme, which is shown in Fig. 1. In
this scheme, pilots are equally spaced in each OFDM symbol,
and each circle represents a resource unit in the time-domain
and frequency-domain. The users working at the non-overlapped
frequency bands. The pilots at the ith transmit antenna of the kth
user is cik ∈ C P ×1 , where P is the number of pilots. Without loss
of generality, we omit subscript k in the subsequent discussion.
The pilot symbol at the ith antenna is ci ∈ C P ×1 , where the
elements in ci are randomly selected from OFDM symbol xfi .
By inverse discrete Fourier transform (IDFT), we can get the
transmission symbol at the time-domain as
xi = F
H
xfi ,
yo =
where xi ∈ C Nc ×1 , FH ∈ C Nc ×Nc is the DFT matrix, (·)H
denotes the complex conjugate transpose, and Nc is the number
of subcarriers. The transmission symbol, xi , at the time-domain
is trandmitted by the ith antenna at the BS.
hoi ∗ xi + n,
(3)
i=1
where hoi ∈ C Nc ×1 and the Lth to Nc th elements of hoi are
zero. The convolution in (3) can be also expressed into matrix
multiplication
yc =
N
BS
Xci hoi + n,
(4)
i=1
where Xci ∈ C Nc ×Nc is a Toeplitze matrix
⎡
xi [0]
xi [Nc − 1] xi [Nc − 2]
⎢ xi [1]
xi [0]
xi [Nc − 1]
⎢
⎢
xi [1]
xi [0]
Xci = ⎢ xi [2]
⎢
⎣
···
···
···
xi [Nc − 1] xi [Nc − 2] xi [Nc − 3]
⎤
xi [1]
xi [2] ⎥
⎥
xi [3] ⎥
⎥ . (5)
⎥
··· ⎦
· · · xi [0]
···
···
···
..
.
In (4), yc is the accumulation of sequence that is cutted to the
o
length of Nc from yo , yc = +∞
i=−∞ y [n + i(2Nc − 1)]. And
the circular convolution in (3) is used to represent by matrix
convolution.
By using DFT, the recieved symbol at the frequence domain
can be expressed as
yf = Fyc =
N
BS
FXci hoi + Fn,
(6)
i=1
yf =
N
BS
FXci FH Fhoi + Fn
i=1
=
(1)
N
BS
N
BS
diag {xfi }Fhoi + Fn
(7)
i=1
Because Xci is the Toeplitze matrix, FXci FH is the diagonal
matrix whose elements are xfi .
To estimate the CSI hi , the users have to extract the pilot
c
∈ C P ×1 from the recieved symbol yf . The received
symbol yΩ
Authorized licensed use limited to: The Islamia University of Bahawalpur. Downloaded on November 05,2022 at 20:48:54 UTC from IEEE Xplore. Restrictions apply.
8732
IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 71, NO. 8, AUGUST 2022
pilot can be written as
c
yΩ
=
N
BS
diag {xfi,Ω }FΩ,L hi + FΩ nc ,
(8)
i=1
where xfi,Ω is selected from xfi in the index set Ω, which is
selected from subcarriers set {1, 2, . . . , Nc } as the type of comb
pilot, FΩ,L ∈ C P ×L is correspondingly a partial Fourier matrix,
the rows are selected form the index of pilot and the columns
are selected from the first L columns from F. Obviously, xfi,Ω
is equal to ci . Thus
c
yΩ
=
N
BS
Ci FΩ,L hi + nc ,
(9)
i=1
where Ci diag{ci }, hi = [hi (1), hi (2), . . . , hi (L)]T is the
CSI from the ith BS antenna to the user; nc = [n1 , . . . , nP ]T
denotes the i.i.d. additive white complex Gaussian noise with
zero mean and variance σn2 over the pilots. If comb-type pilots
as shown in Fig. 1 are used, the received pilots for a certain user
can be expressed as
c
= Φh + n,
yΩ
(10)
where Φ = [C1 FΩ,L , C2 FΩ,L , . . . , CM FΩ,L ], Φ ∈ C P ×LNBS
and h = [hT1 , hT2 , . . . , hTM ]T , h ∈ C LNBS ×1 .
Based on many pratical measurements and theoretical analysis [31], we have an important observation that the number of
non-zero elements of CSI hi is much smaller than its length, L,
thus the channel could be compressed in the time-domain. It is
obvious that (10) can be treated as a problem of CS, Φ is the
sensing matrix, and h is the sparse signal. Thus we can reconc
by utilizing a CS-based reconstruction
struct h from Φ and yΩ
algorithm. Under this channel model, the uplink channel has
the same SNR as the downlink, and the noise parameter, σn2 ,
denotes the overall noise power both in the downlink and in the
uplink [32].
For block-fading time-varying MIMO channels, the CSI
changes from time slot to another but remains same during a
slot. The dynamic channel could be modeled by the variation
of CSI’s support and the evolution of the non-zero elements’
amplitudes [9] as
ht = st ◦ gt ,
(11)
where ht is the CSI at time t, st (l) ∈ {0, 1} denotes whether the
lth support index of st is zero, gt (l) ∈ C denotes the amplitude at
the lth support index of gt and ◦ denotes the Hadamard product.
Specifically, we use a first-order Markov process to model the
support change, i.e. we define two transition probabilities as
p10 P (st+1 (l) = 1|st (l) = 0) ,
(12)
p01 P (st+1 (l) = 0|st (l) = 1) ,
(13)
and
p
1−p p01 ,
to achieve the steady-state sparsity
where we set p10 =
rate p ∈ (0, 1). As for the amplitudes, we use a first-order
autoregressive model expressed as
gt (l) = ρgt−1 (l) +
1 − ρ2 vt (l),
(14)
where the correlation coefficient ρ = J0 (2πfd τ ) is given by the
zero-order Bessel function of the first kind, with fd being the
maximal Doppler frequency and τ being the time slot duration, and the parameter vt (l) ∼ CN (0, σω2 ) is the i.i.d. complex
Gaussian variables.
Some classical CS-based algorithms require to know ahead
of time that the number of non-zero elements in h, which are
not appropriate for the time-varying channel system since it
is hard to get the priori knowledge at every time slot. So it is
imperative to finding a new CS-based method that requires no
priori knowledge of channel and more suitable for this system.
III. JOINT CHANNEL TRAINING AND FEEDBACK
In this section, we will propose a joint training and feedback
scheme, which includes two steps. In the first step, we adopt the
CS-based AS-JOMP algorithm to recover CSI h from received
c
at the BS, then we analyse the performence of ASpilots yΩ
JOMP by discussing the mutual coherence property (MCP) of
the sensing matrix. In the second step, we use the estimated
CSI as the input of the DnNet and the DnLSTM to denoise and
learn the time-variant characteristic between the time-varying
channels.
A. AS-JOMP Algorithm
For simplicity, we omit superscript t in the above equations.
For the FDD system, the CSI knowledge at the BS is obtained
by the step that the ith user estimates the CSI and then feed it
back to the BS. Using the conventional LS-based CSI estimation
techniques, channel can be estimated by
c
,
ĥ = Φ† yΩ
†
H
H
(15)
−1
where Φ = Φ (ΦΦ ) is the Moore-Pensrose pseudoinverse. However, this LS-based approach requires P ≥ LNBS
[5], which induces an overwhelming pilot training and CSI
feedback overhead, particularly when NBS is large. Thankfully,
when P < LNBS , (7) is a problem in underdetermined but could
be soveled by CS technique by exploiting the sparsity of CSI
c
and Φ are referred to
vector. For the general CS model, yΩ
as the measurement and the measurement matrix, respectively.
Moreover, h ∈ C LNBS ×1 , Φ ∈ C P ×LNBS and y ∈ C P ×1 . Obviously the overhead for downlink training is reduced because of
the decrease of the number of pilots. Furthermore, the users feed
back the recived pilots to the BS, in this way, the uplink feedback
can also be reduced from LNBS to P .
In many compressed sensing reconstruction algorithms, orthogonal matching pursuit (OMP) algorithm is the classic one
which is used and improved many times [33]. OMP reconstructs
the channel by iteratively recognizing the support set that contains the indices of the columns of Φ which correlated with the
c
. In each iteration, it selects an index based on
measurement yΩ
a maximum correlation test and subtracts the contribution of
the corresponding column from the current measurement. The
iterative process continues until the indices of non-zero elements
are all recognized. However, the sparsity S is not available for
practical applications in general. This motivates us to propose an
improved AS-JOMP algorithm based on the characteristics of
Authorized licensed use limited to: The Islamia University of Bahawalpur. Downloaded on November 05,2022 at 20:48:54 UTC from IEEE Xplore. Restrictions apply.
FAN et al.: COMPRESSIVE SENSING AND DEEP LEARNING-BASED TIME-VARYING CHANNEL ESTIMATION FOR FDD MASSIVE MIMO SYSTEMS
the practical channel. From [34], in the case of far field, the CSI
between the BS antennas shares the common support and has
the property of structured sparsity because of the close antenna
(t)
BS
spacing at the BS. Thus {hi }N
i=1 can be generated with the
(t) NBS
same support vectors {si }i=1 . Meanwhile, we also observe
that the decreasing magnitudes of energy difference of remaining
observation vectors between two consecutive iterations are different under the different SNR. Following the structured sparsity,
the AS-JOMP algorithm divides the cross-correlation vector
which is the product of the sensing matrix Φ and the remaining
observation vectors ri into NBS vectors and summation, then
selects the index of maximum value like OMP. This process can
select more accurate indices of non-zero elements of CSI. With
the second observation, two threshold parameter are used to stop
the iteration under high and low SNR. Thus AS-JOMP algorithm
can adaptively recover the CSI without any priori information
of the sparsity.
The pseudocode of the proposed algorithm is provided in
Algorithm 1. For Algorithm 1, some notations should be further
detailed. supp(Γ(x, k)) denotes an operator on x that find the
index of the k largest value in x and Tmin () in step 13 means
to find the first value that makes the inequality true. Then we
further explain the main steps in Algorithm 1 as follows. First,
for steps 3 − 8, we aim to find those columns of measurement
matrix Φ that are participate in forming the measurement y. The
elements in set Λ are the indices of the columns that are more
correlated with y. Second, in steps 9 − 11, we use thresholds
ξ1 to stop the iteration, obtaining the sparsity level and signal
estimation in high SNR. In steps 12 − 15, we use thresholds
ξ2 to stop the iteration and obtain the sparsity level in low SNR.
Thus, until step 17, we get the true sparsity level s. Third, for
steps 18 − 28, we can estimate the signal by the LS algorithm.
Finally, the ture signal estimation can be got by step 29.
Compared to the other state-of-the-art CS-based channel estimation schemes [33], [35], the proposed AS-JOMP algorithm
has the following distinctive features:
1) The proposed AS-JOMP algorithm removes the unrealistic assumption that the channel sparsity level is required
as the priori information for reliable channel estimation
since it can adaptively acquire the sparsity level of wireless
MIMO channels. The proposed stopping criteria enables
AS-JOMP algorithm to estimate channels with good performance under high and low SNR levels.
2) The AS-JOMP algorithm offers a more precise support
update by considering the structured sparsity of h, the
BS
support of each {hi }N
i=1 is updated together. By doing
so, the CSI recovery performance can be improved.
B. Performance Analysis of Proposed AS-JOMP Algorithm
From the theory of CS, sensing matrix Φ plays a decisive
role in the recovery performance of sparse vectors h. In order to
ensure the sparse signal recovery performance, many researches
have proved that the sensing matrix should satisfy the restricted
isometry property (RIP) and MCP [9], [33]. In this section, we
will discuss the MCP of the sensing matrix in our method.
8733
Algorithm 1: AS-JOMP Algorithm.
Input: Received pilots y; Measurement matrix Φ;
Estimated sparsity s; Threshold ξ1 , ξ2 .
Output: CSI recovery ĥ
1: Initialization:
2: ri = y, i = 1, f lag = 0, Λ = ∅.
3: while f lag = 0 do
BS −1
e(mL + l), l =
4:
e = ΦH ri ; z(l) = N
m=0
1, 2, . . . , L
5:
inx = supp(Γ(z, 1))
6:
J0 = {mL + l}, m = 0, 1, 2, . . . , NBS − 1, l =
inx
7:
Λ = Λ ∪ J0 ; ĥt = Φ†Λ y
8:
i = i + 1; ri = y − Φ†Λ ĥt
9:
if i > 1& ri−1 2 > ξ1 ri 2 then
10:
s=i−1
11:
break;
12:
else if i >= m then
13:
j = Tmin ( rj−1 2 < ξ2 rj 2 ), j = 2, . . . , m
14:
do initial again
15:
f lag = 1; s = j − 1
16:
end if
17: end while
18: while f lag = 1 do
BS −1
e(mL + l), l =
19:
e = ΦH ri ; z(l) = N
m=0
1, 2, . . . , L
20:
inx = supp(Γ(z, 1))
21:
J0 = mL + l, m = 0, 1, 2, . . . , NBS − 1, l = inx
22:
Λ = Λ ∪ J0 ; ĥt = Φ†Λ y
23:
i = i + 1; ri = y − Φ†Λ ĥt
24:
if i >= s then
25:
f lag = 0
26:
end if
27: end while
28: ĥΛ = ĥt
29: Return ĥ
The coherence μ(Φ) is defined as the largest normalized inner
product of any two columns of Φ
μ(Φ) =
max
1≤i=j≤LNBS
ΦH
:,i Φ:,j
,
Φ:,i Φ:,j
(16)
where Φ:,i is the ith column vector of μ(Φ). The sparsity, i.e.
the number of non-zero elements of h, is SN BS . Suppose that
(
1
+1)
SNBS ≤ μ(Φ)4
, then the estimated sparse vector ĥ has error
bounded by [9], [33]
ĥ − h
2
≤
γ
1 − μ(Φ)(4SNBS − 1)))
.
(17)
From (17), the estimation error is influenced by the parameters,
the variance of noise vector γ, the value of μ(Φ), which is
always greater than or equal to zero, and the sparsity level
of the channel. Once the communication system is given, the
number of antennas will be given. And the sparsity and SNR are
determined by the propagation features and the characteristics
Authorized licensed use limited to: The Islamia University of Bahawalpur. Downloaded on November 05,2022 at 20:48:54 UTC from IEEE Xplore. Restrictions apply.
8734
IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 71, NO. 8, AUGUST 2022
of communication system. Therefore, the smaller value of the
μ(Φ), the better recovery performance. It will make the design
of Φ very essential.
As for Φ = [C1 FΩ,L , C2 FΩ,L , . . . , CM FΩ,L ], the value of
the μ(Φ) is determined by the pilot symbol Ci . Suppose that
the elements in pilot sequence have random phase and unit
amplitude,
the magnitude of the column vectors of the matrix Φ
√
is P . We have
G=
1 H
ΦH (:, i) Φ(:, j)
Φ Φ=
,
P
Φ(:, i) Φ(:, j)
(18)
thus the maximum absolute value of the non-diagonal elements
gij (i = j) of G is μ(Φ), that is
μ(Φ) = max |gij | .
(19)
i=j
Fig. 2.
The DnNet model for CSI denoising.
And according to formula (18), (19) can be further expressed as
P
2π
1
max
μ(Φ) =
cip cjp e−j Nc mp (n1 −n2 ) ,
P i=j˜or˜n1 =n2 p=1
C. CNN-Based DnNet Method
(20)
where 1 ≤ i, j ≤ LNBS , 0 ≤ n1 , n2 ≤ L − 1, cip (p =
1, 2, . . ., P ) is the complex conjugate of the kth element of ci ,
and the {mp }P
p=1 is the subcarrier index which assigned to the
−j Nc mp (n1 −n2 )
∗
pilot. When i = j or n1 = n2 , P1 P
p=1 cip cjp e
is not the diagonal element of G. Consider three situations:
r if i = j and n1 = n2 , (20) can be expressed as
2π
μ(Φ) =
P
2π
1
max
e−j Nc mp (n1 −n2 ) ,
P
p=1
(21)
m
because Ncp obey uniform distribution U[0, 1), the value
of expectation of μ(Φ) is zero.
r if i = j and n1 = n2 , (20) can be expressed as
P
P
1
1
max
cip cjp = max
ej2π(θjp −θip ) ,
P
P
p=1
p=1
(22)
because θjp and θip is the phase of pilot cjp and cip , they
obey uniform distribution U[0, 1), the value of expectation
of μ(Φ) is zero.
r if i = j and n1 = n2 , (20) can be expressed as
μ(Φ) =
P
mp
1
max
ej2π( Nc (n2 −n1 )+(θjp −θip )) .
i
=jandn
=n
P
1
2
p=1
(23)
m
because Ncp , θjp and θip obey uniform distribution U[0, 1),
the value of expectation of μ(Φ) is zero.
From the above analysis, the elements in pilot sequence have
random phase and unit amplitude can ensure the value of the
μ(Φ) be minimum, i.e. the value of expectation of μ(Φ) is zero.
Hence, the sparse vector h can be estimated accurately.
Eventhough the indices of non-zero elements of sparse channel can be selected by AS-JOMP algorithm, the noise that added
on these indices does not be eliminate, and the time-variation
characteristic is not well used. Based on these requirements, we
proposed a DL-based network, named DnNet.
μ(Φ) =
In this section, we exploit the popular convolutional neural
networks (CNNs) to denoise and improve the reconstruction
quality.
As we know, in the filed of signal denoising, the main
method is sparse decomposition, whose principle is to use an
over-complete atomic libraries to express the noise signal. The
original signal is reconstructed with a few S-large coefficients
and some small coefficients with noise are shielded. However,
the noise that added on the S non-zero elements of the signal
is hard to be eliminated with the CS-based method. Thus, we
propose a CNN-based method, named DnNet, to denoise, i.e.
learn the difference between the initial estimation ĥ and the
original CSI h and then recover a more accuracy CSI h̃.
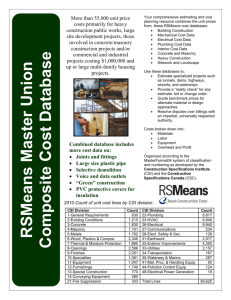
The structure of our developed model, DnNet, is illustrated in
Fig. 2. Here S1 , S2 and S3 denote the length, the width, and the
number of feature maps, respectively. Once CSI is estimated,
which is LNBS × 1, we reshape its real and imaginary parts
into a 2LNBS × 1 real-valued vector and then normalize it.
After that, we reshape the 2LNBS × 1 real-valued vector into
two Ñ1 × Ñ2 matrices with Ñ1 × Ñ2 = LNBS , which can be
regarded as an image with two channels.
Then the reshaped initial estimate CSI is fed into several residual learning networks [36], named Resblock. Each Resblock
consists of four layers, as shown in Fig. 2. The first layer is
the input layer, for layers 2-4, S3 filters of size 3 × 3 × S3 are
used, and batch normalization is added between convolution and
Leaky rectified linear unit (LeakeyReLU), which is used as the
activation function. We consider the input of the Resblock as
a shortcut and add it to the output of the fourth convolutional
layer to avoid the vanishing gradient problem. Once the channel
matrix has been refined by all Resblocks, the channel matrix
is inputted into the final convolutional layer and the sigmoid
function is used to scale values to [0,1]. Finally, we reshape
the output of our network and perform the anti-normalization to
obtain the final reconstruction of CSI h̃.
Through extending simulation, we find using five Resblocks
can obtained the best performance, adding more Resblocks
does not significantly boost reconstruction quality but increases
computational complexity and training time. In this training,
Authorized licensed use limited to: The Islamia University of Bahawalpur. Downloaded on November 05,2022 at 20:48:54 UTC from IEEE Xplore. Restrictions apply.
FAN et al.: COMPRESSIVE SENSING AND DEEP LEARNING-BASED TIME-VARYING CHANNEL ESTIMATION FOR FDD MASSIVE MIMO SYSTEMS
Fig. 3.
The DnLSTM Network data transmission model.
Fig. 4.
The ConvLSTM network basic unit structure.
parameters are updated by the adaptive moment estimation
(ADAM) algorithm. The loss function is the mean-squared error
(MSE), which is calculated as follows:
L(Θ) =
T
1
f (ĥ; Θ) − h)
T i=1
2
2
(24)
where · 2 is the Euclidean norm, Θ is the set of parameters of
our deep learning network, T is the total number of samples in
the training set, and f (ĥ; Θ) is the output of the trained model.
D. CNN-Based DnLSTM Method
In DnNet network, CNN can effectively extract the features
of CSI matrix to reduce the noise, and the network can also
learn time-varying features. However, at training stage, it is
not reliable to only use multi-layer CNN to learn time-varying
features, and there is no theoretical support. Therefore, this
section proposes a joint network based on CNN and LSTM,
named DnLSTM, which can not only extract channel structure
information by CNN to reduce noise, but also learn the correlation of time-domain channel through LSTM network. In this
way, the spatial and temporal characteristics of the channel can
8735
be effectively learned so that the final CSI estimate accuracy can
be improved.
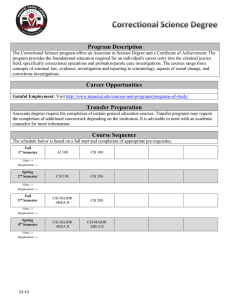
The structure of DnLSTM network proposed in this article
is shown in Fig. 3. In this network, the CSI channel group
Ĥi ∈ C LNBS ×1×T is taken as input, where T is the number of
CSI in a channel group and i = 1, 2, . . . , Nsample , where Nsample
is the number of samples. The output result of the network
is expressed as Hi ∈ C LNBS ×1×T . For convenience, we omit
the subscript i and express Ĥ and H as Ĥ = [ĥ0 , ĥ1 , . . . ĥT −1 ]
and H = [h0 , h1 , . . . hT −1 ]. At present, the input data of deep
neural network are all real numbers. So we use two matrices
of real numbers to represent the real and imaginary parts of the
input channel matrix. Then all the elements in the matrix are
normalized to [0,1], which can be equivalent to image data with
two channels for convenient training. ĥ obtained by as-JOMP
algorithm is a complex vector with the size of LNBS × 1.
Therefore, the real and imaginary parts of the complex vector
are separated into two real vectors of size LNBS × 1, and then
transformed into two real matrices of size Ñ1 × Ñ2 , Ñ1 × Ñ2
= LNBS . Thus, the data of each layer of the network is a
four-dimensional tensor, and S1 × S2 × S3 on the left of each
layer represents the size of CSI channel group. S4 at the top is
the number of feature maps.
In fact, the proposed DnLSTM network is composed of
three layers, mainly including channel feature extraction, timevarying channel correlation extraction, and the CSI reconstruction. The main components are as follows:
1) Channel Feature Extraction: Channel feature extraction
is mainly completed by CNN network at the first layer. In
this process, each matrix of time dimension can be separately
convoluted to extract features. The convolution layer contains
64 3 × 3-sized convolution kernels with sliding step size of 1.
The same padding is used to fill zeros around the input during
convolution, so that the feature graph output by the network of
each layer is kept the same size as the original channel matrix,
and ReLU is used as activation function.
2) Time-varying Channel Correlation Extraction: The extraction of temporal correlation is mainly accomplished by the
second layer LSTM network. At present, most LSTM networks
predicting temporal state use fully connected structure, but the
input of fully connected networks is one-dimensional and the
spatial correlation is not taken into account. Compared with traditional methods, the convolution operation used in ConvLSTM
network can get better space-time relation since the ConvLSTM
layer, like LSTM, takes the output of the previous layer as the
input of the next layer. As shown in Fig. 4, the ConvLSTM network consists of an input gate it to record new information to the
current state, an output gate ot to control how much information
of the current state is visible to the external network, a forgetting
gate ft to control how much information of the historical state
is allowed to enter after flowing to the current state, and a
memory unit Ct to store information of the previous moment.
Here Wxi , Whi , Wci , Wxo , Who , Wco , Wxf , Whf , Wcf is
the weight matrix, bi , bo , bf , bc is the bias, ◦ denotes the
Hadamard product, σ(·) represents the sigmoid layer. The output
is numbers in range of [0,1]. Output 0 represents the proportion
of information passing, 0 means no passing, 1 means all passing.
Authorized licensed use limited to: The Islamia University of Bahawalpur. Downloaded on November 05,2022 at 20:48:54 UTC from IEEE Xplore. Restrictions apply.
8736
IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 71, NO. 8, AUGUST 2022
The above parameters can be calculated by
⎧
it = σ (Wxi ∗ xt + Whi ∗ ht−1 + Wci ◦ Ct−1 + bi )
⎪
⎪
⎪
⎪
⎨ ot = σ (Wxo ∗ xt + Who ∗ ht−1 + Wco ◦ Ct + bo )
ft = σ (Wxf ∗ xt + Whf ∗ ht−1 + Wcf ◦ Ct−1 + bf )
⎪
⎪
C
⎪
t = ft ◦ Ct−1 + it ◦ tanh (Wxc ∗ xt + Whc ∗ ht−1 + bc )
⎪
⎩
ht = ot ◦ tanh (Ct )
(25)
We take the preliminary estimated T CSI matrices as input
to the ConvLSTM layer in chronological order. At each time
step, the ConvLSTM network can fuse the temporal correlation
information learned at the previous time into the input of the
current time step. The correlation information is updated as the
time step passes.
3) CSI Reconstruction: In order to obtain the same dimension as the input data, we consider using the same padding, ReLU
activation function and 3 × 3 × 2 size of filters. Finally, we
implement dimension transformation and inverse normalization
to obtain the final CSI estimation result h.
IV. SIMULATION RESULTS
This section investigates the performence of the proposed ASJOMP-based and DL-based joint channel training and feedback
scheme. In the massive MIMO system, the length of the OFDM
symbol is Nc = 1024, the BS is equipped with NBS = 16
antennas, and the channel length is L = 64. The parameters
that generate the time-varying channel are set as follows [9].
The sparsity probability μ is set as 0.1, i.e. the average channel
sparsity level is μL = 6, the transition probability p01 is set as
0.16, the movement velocity v of users is 12 km/h, the carrier
frequency is 900 MHz, the time slot duration is τ = 0.5 ms,
σv2 = 1 and the initial amplitudes g0 (l) ∼ CN (0, 1). The coefficients ξ1 and ξ2 in Algorithms 1 is set as 2 and 1.1, respectively.
The training overhead is η = P/N .
Keras and Tensorflow with a GPU backend are used to implement our proposed scheme. In the offline stage, the loss
function of the network is measured by MSE and the exploited
optimization algorithm is adaptive moment estimation (ADAM).
The batch size is 200 with the epochs of 200. The training,
validation and testing set contains 84,000, 18,000 and 18,000
samples, respectively. Before training the model, we normalize
the estimated signal. The training set, validation set, and test
set use the same parameters to perform the normalization and
anti-normalization.
The recovery performance is quantified by the NMSE as
2
(26)
NMSE = E h − h̃ / h 22 ,
2
where h and h̃ denote the original and the recovered CSI, respectively. We use the NMSE to measure the difference between
the recovered CSI h̃ and the original h.
Firstly, in Fig. 5, we compare the proposed AS-JOMP algorithm with other calssical methods that we have mentioned under
different training overhead
r J-OMP: Joint orthogonal matching pursuit (J-OMP) algorithm has been proposed in [4] for conducting the CSI
reconstruction by exploiting the joint sparsity in the user
Fig. 5. Performance comparison between CS reconstruction algorithms in
different training overhead.
channel matrices. J-OMP degrades as OMP [33] because
we consider singel user instead of multiple users.
r S-CoSaMP: Structured compressive sampling matching pursuit (S-CoSaMP) [9] is the improvement of
CoSaMP [37] by exploiting the temporal correlation of
MIMO channels.
r SP: Subspace pursuit (SP) algorithm is a very important
greedy methodology in compressed perception. It has a
faster computing speed and better reconstruction probability, and is widely used in practice [38].
r SAMP: Sparsity adaptive matching pursuit (SAMP) algorithm require no sparsity S, it fill the support set by setting
the step size and appropriate stopping conditions (which
greatly affects the accuracy) [39].
r Oracle-LS: It is the performance bound in the CS-based
algorithms. In our paper, this serves as a benchmark to
evaluate the quality of channel estimation, in which the
position of non-zero elements are assumed known and only
the values are estimated by the LS estimator [4], [13].
From Fig. 5, when the training overhead, η, increases, the
accuracy of reconstruction increases too. That is because when
η increase, the P is large, the size of measurement marix is
also large, so the compressive measurement y contains more
information about channel, the more observations are made for
the sparse channel, the more channel features are captured in the
observed value vector, and the better reconstruction is. When the
training overhead increase, the reconstruction performance of
the algorithm is only slightly improved. On the other hand, the
proposed scheme achieves more reduction in channel training
and feedback overhead over the conventional scheme in achieving the same performece on recovering CSI at the BS.
In Fig. 6, the NMSE with respect to SNR is illustrated when
η = 0.3. Note that the NMSE of all methods decreases when
the value of SNR increases because the noisy energy decreases.
In addition, the AS-JOMP algorithm achieves the best NMSE
performance and is superior to the other method. That is because it exploites the structured sparsity of channel and adaptively find the sparsity level under the both high and low SNR
levels.
Authorized licensed use limited to: The Islamia University of Bahawalpur. Downloaded on November 05,2022 at 20:48:54 UTC from IEEE Xplore. Restrictions apply.
FAN et al.: COMPRESSIVE SENSING AND DEEP LEARNING-BASED TIME-VARYING CHANNEL ESTIMATION FOR FDD MASSIVE MIMO SYSTEMS
Fig. 6. Performance comparison between CS reconstruction algorithms in
different SNR.
Fig. 8. Performance comparison between AS-JOMP algorithm and added
DnNet as well as DnLSTM networks.
COMPARISON OF
Fig. 7. Performance comparison between CS reconstruction algorithms in
different number of BS antennas.
In massive MIMO systems, different antenna scale will lead
to different channel estimation performance. Therefore, Fig. 7
shows the evaluation of the effect of BS antennas on the channel
estimation results, when SNR=20, η = 0.3 and the number of
subcarriers Nc is 1024. It can be observed that with the increase
of NBS , the NMSE performance of the AS-JOMP algorithm as
well as other algorithms deteriorates. However, AS-JOMP algorithm can always approach the performance limit, while NMSE
performance of other algorithms deteriorates more seriously.
This is because the proposed algorithm can more accurately
estimate the position of non-zero elements while other methods
cannot when they gradually increase. When NBS > 16, as the
channel length L = 64 and Nc is 2048, the number of pilots
P required by the traditional LS and MMSE method should be
equal or greater than 1024, so it is not applicable. However,
CS-based algorithms, especially the AS-JOMP algorithm, can
still achieve good performance. Therefore, this method has great
advantages in massive MIMO systems.
Fig. 8 shows the NMSE of AS-JOMP algorithm, AS-JOMP
+ DnNet algorithm, and AS-JOMP + DnLSTM algorithm with
SNR, where the number of BS antennas is 32, the pilot overhead
is 30%, and the number of subcarriers is 1024. It can be observed
8737
TABLE I
RECONSTRUCTION TIME OF EACH ALGORITHM
that the estimation performance has been greatly improved by
adding DnNet after the AS-JOMP algorithm, especially in the
case of low SNR. This is because when the SNR is low, there
are more different characteristics between the noisy CSI and
the original CSI are more different. When the SNR is high, the
accuracy of the AS-JOMP algorithm has been very good, so there
is only little difference between the two methods. On the other
hand, when DnLSTM is added after the AS-JOMP algorithm, the
NMSE under different SNR is further reduced. This is because
the AS-JOMP algorithm only estimates the channel in a single
temporal state and does not use the information of time-varying
channels, while the LSTM network in DnLSTM can effectively
learn the long-term time-varying information. In this case, its
performance is also better than the DnNet algorithm.
In order to analyze the computation complexity of each
algorithm, the comparison of the average reconstruction time
of each algorithm is given in Table I. The trained DnNet and
DnLSTM networks were tested on Nvidia GeForce RTX2070
GPU. As the traditional method cannot use GPU acceleration,
Intel Core I7 CPU is used for calculation. It can be observed that
J-OMP algorithm has the shortest reconstruction time, because
it directly reconstructs the measured value according to the
known information of the support and does not need to search
for sparsity adaptively. S-CoSaMP and SP algorithms are also
with known priori information, but the reconstruction time is
higher than AS-JOMP algorithm. This is because AS-JOMP algorithm uses two iterative thresholds, which makes the adaptive
sparseness search faster. At the same time, it can be seen that
the time used for CSI estimation based on DnNet network and
Authorized licensed use limited to: The Islamia University of Bahawalpur. Downloaded on November 05,2022 at 20:48:54 UTC from IEEE Xplore. Restrictions apply.
8738
IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 71, NO. 8, AUGUST 2022
DnLSTM network is much less than that required by traditional
methods. The average CSI reconstruction time is 0.0001 and
0.0002 seconds, and the time used by DnLSTM network is the
smallest because the structure of DnLSTM network is simpler
than that of DnNet.
V. CONCLUSION
In this article, we have proposed a joint channel estimation
method which contains two steps to reduce the training and
feedback overhead in the time-varying channels. We use a new
CS-based algorithm, named AS-JOMP, to reconstruct the CSI
from the received pilots at the BS and then exploit a DL-based
algorithm, named DnNet, to obtain more accurate results. The
stimulation results have verified the performance gains on recovering CSI by the proposed method in terms of recovery accuracy.
REFERENCES
[1] Z. Qin, J. Fan, Y. Liu, Y. Gao, and G. Y. Li, “Sparse representation for
wireless communications: A compressive sensing approach,” IEEE Signal
Process. Mag., vol. 35, no. 3, pp. 40–58, May 2018.
[2] Q. Shi, M. Razaviyayn, Z. Luo, and C. He, “An iteratively weighted
MMSE approach to distributed sum-utility maximization for a MIMO
interfering broadcast channel,” IEEE Trans. Signal Process., vol. 59, no. 9,
pp. 4331–4340, Sep. 2011.
[3] M. Arnold, S. Dörner, S. Cammerer, S. Yan, J. Hoydis, and S. T. Brink,
“Enabling FDD massive MIMO through deep learning-based channel
prediction,” 2019, arXiv:1901.03664.
[4] X. Rao and V. K. N. Lau, “Distributed compressive CSIT estimation and
feedback for FDD multi-user massive MIMO systems,” IEEE Trans. Signal
Process., vol. 62, no. 12, pp. 3261–3271, Jun. 2014.
[5] M. K. Ozdemir and H. Arslan, “Channel estimation for wireless OFDM
systems,” IEEE Commun. Surv. Tut., vol. 9, no. 2, pp. 18–48, Apr.–Jun.
2007.
[6] X. Zhu, L. Dai, G. Gui, W. Dai, Z. Wang, and F. Adachi, “Structured
matching pursuit for reconstruction of dynamic sparse channels,” in Proc.
IEEE Glob. Commun. Conf., 2015, pp. 1–5.
[7] Y. Han, P. Zhao, L. Sui, and Z. Fan, “Time-varying channel estimation
based on dynamic compressive sensing for OFDM systems,” in Proc. IEEE
Int. Symp. Broadband Multimedia Syst. Broadcast., 2014, pp. 1–5.
[8] H. Yang, Y. Fan, D. Liu, Z. Zheng, and S. Lin, “Compressive sensing and
prior support based adaptive channel estimation in massive MIMO,” in
Proc. 2nd IEEE Int. Conf. Comput. Commun., 2016, pp. 1618–1622.
[9] W. Shen, L. Dai, Y. Shi, B. Shim, and Z. Wang, “Joint channel training and
feedback for FDD massive MIMO systems,” IEEE Trans. Veh. Technol.,
vol. 65, no. 10, pp. 8762–8767, Oct. 2016.
[10] R. Zhang, H. Zhao, and J. Zhang, “Distributed compressed sensing aided
sparse channel estimation in FDD massive MIMO system,” IEEE Access,
vol. 6, pp. 18383–18397, 2018.
[11] M. A. Naser, M. Q. Alsabah, and M. A. Taher, “A partial CSI estimation approach for downlink FDD massive-MIMO system with different
base transceiver station topologies,” Wireless Pers. Commun., vol. 119,
pp. 3609–3630, 2021.
[12] Y. Zhang, R. Venkatesan, O. A. Dobre, and C. Li, “An adaptive matching
pursuit algorithm for sparse channel estimation,” in Proc. IEEE Wireless
Commun. Netw. Conf., 2015, pp. 626–630.
[13] M. J. Azizipour and K. Mohamed-Pour, “Compressed channel estimation
for FDD massive MIMO systems without prior knowledge of sparse
channel model,” IET Commun., vol. 13, no. 6, pp. 657–663, Apr. 2019.
[14] Z. Gao, L. Dai, Z. Wang, and S. Chen, “Spatially common sparsity based
adaptive channel estimation and feedback for FDD massive MIMO,” IEEE
Trans. Signal Process., vol. 63, no. 23, pp. 6169–6183, Dec. 2015.
[15] X. Bi, J. Zhao, G. Wang, Y. Lu, L. Zhou, and D. Li, “Modified CSbased downlink channel estimation with temporal correlation in FDD
massive MIMO systems,” in Proc. Wireless Telecommun. Symp., 2018,
pp. 1–7.
[16] J. P. Vila and P. Schniter, “Expectation-maximization Gaussian-mixture
approximate message passing,” IEEE Trans. Signal Process., vol. 61,
no. 19, pp. 4658–4672, Oct. 2013.
[17] C. Wen, W. Shih, and S. Jin, “Deep learning for massive MIMO CSI
feedback,” IEEE Wireless Commun. Lett., vol. 7, no. 5, pp. 748–751,
Oct. 2018.
[18] J. Guo, C. Wen, S. Jin, and G. Y. Li, “Convolutional neural networkbased multiple-rate compressive sensing for massive MIMO CSI feedback:
Design, simulation, and analysis,” IEEE Trans. Wireless Commun., vol. 19,
no. 4, pp. 2827–2840, Jan. 2020.
[19] C. Lu, W. Xu, H. Shen, J. Zhu, and K. Wang, “Mimo channel information
feedback using deep recurrent network,” IEEE Commun. Lett., vol. 23,
no. 1, pp. 188–191, Jan. 2019.
[20] X. Li and H. Wu, “Spatio-temporal representation with deep neural recurrent network in MIMO CSI feedback,” IEEE Wireless Commun. Lett.,
vol. 9, no. 5, pp. 653–657, May 2020.
[21] J. Wang, Y. Ding, S. Bian, Y. Peng, M. Liu, and G. Gui, “UL-CSI data
driven deep learning for predicting DL-CSI in cellular FDD systems,”
IEEE Access, vol. 7, pp. 96105–96112, 2019.
[22] T. Wang, C. Wen, S. Jin, and G. Y. Li, “Deep learning-based CSI feedback approach for time-varying massive MIMO channels,” IEEE Wireless
Commun. Lett., vol. 8, no. 2, pp. 416–419, Apr. 2019.
[23] Y. Wang, J. Yang, M. Liu, and G. Gui, “LightAMC: Lightweight automatic modulation classification via deep learning and compressive
sensing,” IEEE Trans. Veh. Technol., vol. 69, no. 3, pp. 3491–3495,
Mar. 2020.
[24] J. Fan, S. Chen, X. Luo, Y. Zhang, and G. Y. Li, “A machine learning approach for hierarchical localization based on multipath MIMO
fingerprints,” IEEE Commun. Lett., vol. 23, no. 10, pp. 1765–1768,
Oct. 2019.
[25] Y. Ge and J. Fan, “Beamforming optimization for intelligent reflecting
surface assisted MISO: A deep transfer learning approach,” IEEE Trans.
Veh. Technol., vol. 70, no. 4, pp. 3902–3907, Apr. 2021.
[26] P. Liang, J. Fan, W. Shen, Z. Qin, and G. Y. Li, “Deep learning and
compressive sensing-based CSI feedback in FDD massive MIMO systems,” IEEE Trans. Veh. Technol., vol. 69, no. 8, pp. 9217–9222, Aug.
2020.
[27] C. Lu, W. Xu, S. Jin, and K. Wang, “Bit-level optimized neural network
for multi-antenna channel quantization,” IEEE Wireless Commun. Lett.,
vol. 9, no. 1, pp. 87–90, Jan. 2020.
[28] Y. Liao, Y. Hua, and Y. Cai, “Deep learning based channel estimation
algorithm for fast time-varying MIMO-OFDM systems,” IEEE Commun.
Lett., vol. 24, no. 3, pp. 572–576, Mar. 2020.
[29] H. He, C.-K. Wen, S. Jin, and G. Y. Li, “Deep learning-based channel estimation for beamspace mmwave massive MIMO systems,” IEEE Wireless
Commun. Lett., vol. 7, no. 5, pp. 852–855, Oct. 2018.
[30] X. Ma, Z. Gao, F. Gao, and M. Di Renzo, “Model-driven deep learning based channel estimation and feedback for millimeter-wave massive
hybrid MIMO systems,” IEEE J. Sel. Areas Commun., vol. 39, no. 8,
pp. 2388–2406, Aug. 2021.
[31] F. Kaltenberger, D. Gesbert, R. Knopp, and M. Kountouris, “Correlation
and capacity of measured multi-user MIMO channels,” in Proc. IEEE 19th
Int. Symp. Pers. Indoor Mobile Radio Commun., 2008, pp. 1–5.
[32] H. Shirani-Mehr and G. Caire, “Channel state feedback schemes for
multiuser MIMO-OFDM downlink,” IEEE Trans. Commun., vol. 57, no. 9,
pp. 2713–2723, Sep. 2009.
[33] M. F. Duarte and Y. C. Eldar, “Structured compressed sensing: From
theory to applications,” IEEE Trans. Signal Process., vol. 59, no. 9,
pp. 4053–4085, Sep. 2011.
[34] Y. Barbotin, A. Hormati, S. Rangan, and M. Vetterli, “Estimation of sparse
MIMO channels with common support,” IEEE Trans. Commun., vol. 60,
no. 12, pp. 3705–3716, Dec. 2012.
[35] W. Dai and O. Milenkovic, “Subspace pursuit for compressive sensing: Closing the gap between performance and complexity,” CoRR,
vol. abs/0803.0811, pp. 1–19, Jan. 2008.
[36] K. He, X. Zhang, S. Ren, and J. Sun, “Deep residual learning for image
recognition,” in Proc. IEEE Conf. Comput. Vis. Pattern Recognit., 2016,
pp. 770–778.
[37] D. Needell and J. Tropp, “CoSaMP: Iterative signal recovery from incomplete and inaccurate samples – sciencedirect,” Appl. Comput. Harmon.
Anal., vol. 26, no. 3, pp. 301–321, May 2009.
[38] N. Kato, B. Mao, F. Tang, Y. Kawamoto, and J. Liu, “Ten challenges
in advancing machine learning technologies toward 6G,” IEEE Wireless
Commun., vol. 27, no. 3, pp. 96–103, Jun. 2020.
[39] T. T. Do, L. Gan, N. Nguyen, and T. D. Tran, “Sparsity adaptive matching pursuit algorithm for practical compressed sensing,” in Proc. 42nd
Asilomar Conf. Signals Syst. Comput., 2008, pp. 581–587.
Authorized licensed use limited to: The Islamia University of Bahawalpur. Downloaded on November 05,2022 at 20:48:54 UTC from IEEE Xplore. Restrictions apply.