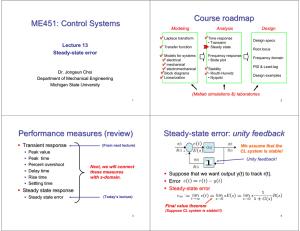
Control Systems Steady state error ch.7 R(s ) G (s ) Lecturer: Musaab Zaroug 2023 C (s ) Outline • Definition of Steady-State Error. • Steady-state error for unity feedback systems. • Steady-state error for non-unity feedback systems. • System types. • Steady-state error for disturbances • Sensitivity • Section 7.8 is not included Introduction • control systems analysis and design focus on three specifications: (1) transient response, (2) stability, and (3) steady-state errors Elevator Location (floor) Definition of the Steady-State error Input command 4 Transient response Steady-state responce 1 Time Steady-state error Input test signals r (t ) • Unit Step fwe want to test t constant position using Unit step r (t ) • Unit Ramp for velocity t If r (t ) • Unit Parabola ace t S.S. Error in terms of G(s) Oo Change between input and output if we know input Rli and Tf G we can calculate the steadystate ero openLoop Tf sing if we want teady stateerror in time domain S.S. Error for unity feedback systems R(s) E (s) G (s) C (s) whenwe have closeloop T f R(s) E (s) G ( s) T ( s) 1 G(s) C (s) close loop TF closeloopTf • Example: Find the S.S. Error for a unity feedback system with • Answer step 43 R'd Le In Li Tin Tin ligy.gg 1 I S.S. Error in terms of G(s) O Dy Example • Find the S.S. Error for the following system for inputs R(s ) E (s ) p GI 100( s 2)( s 6) s ( s 3)( s 4) C (s ) TyPI f 544 es 5 tutti fr Ga Iya s Ey of Ey o SE ult I so a os Error constants • Position constant • Velocity constant • Acceleration constan The system type R(s ) • For the unity feedback system shown above the type of the system is defined as (n). E (s ) K ( s z1 )( s z2 ) C (s ) n sO ( s p1 )( s p2 ) n o n l n2 É O This type Is input give us go to a the table and see value for steady state using Ramp Kult what the type of error e a 0.1 54 esta 6 78 IT 46722 another input 85 s detain wt witnatmyth Tron RIn Eastin that the steady-state error produced by a step ashows disturbance can be reduced by increasing the dc gain of FinTisdeftbecuatthe step G1(s) or decreasing the dc gain of G2(s). m Ms ofsystem exit in theCys The degree to which changes in system parameters affect system transfer functions, and hence performance, is called sensitivity. A system with zero sensitivity (that is, changes in the system parameters have no effect on the transfer function) is ideal. The greater the sensitivity, the less desirable the effect of a parameter change. T Ts Sta f I East y Its S.S. Error for Non-unity feedback systems R(s) + - G C (s ) R(s) + G - - H(s) H(s) (a) -1 R(s) + - G( s) 1 G( s) H ( s) G( s) (c) C (s ) (b) C (s ) Tutorial • For the system shown in the following figure, find the system type, the appropriate error constant, and the steady state error for a unit step input. Assume input and output units are the same. R(s) + - 100 s ( s 10) 1 ( s 5) C (s )