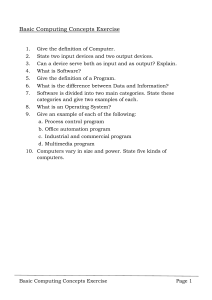
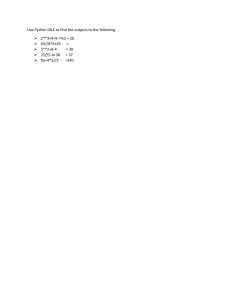
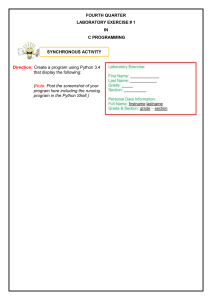
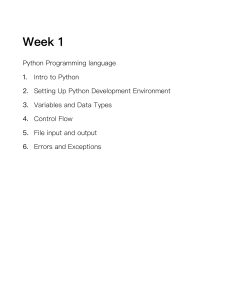
MACRo 2017 - 6th International Conference on Recent Achievements in Mechatronics, Automation, Computer Science and Robotics Network Automation and Abstraction using Python Programming Methods Paul MIHĂILĂ, Titus BĂLAN, Radu CURPEN, Florin SANDU Electronics and Computers Department, Faculty of Electrical Engineering and Computer Science, ”Transilvania” University, Brașov, e-mail: paul_mihaila2002@yahoo.com e-mail: titus.balan@unitbv.ro, e-mail: radu.curpen@unitbv.ro, e-mail: sandu@unitbv.ro Manuscript received September 10, 2017, revised October 19, 2017. Abstract: Network programmability is a trend, enhanced and inspired by Software Defined Networks, that are based on scripting methods and standard programming languages used for controlling and monitoring of network elements. This paper is illustrating some new methods in configuring network devices by using automation, reducing time for equipment configuration and easier maintenance. It also improves network security by recognizing and fixing security vulnerabilities and it increases the network stability. These methods represent the future of networks, allowing the management of an increased number of devices in a unitary way. Keywords: Network automation, software defined networks, computer network operations, network management, python scripting. 1. Introduction The number of devices in a network and their heterogeneous nature is steadily increasing. The traditional methods used for network equipment configuration are time consuming, taking into consideration also the vendor specific know-how needed. The Software Defined Networks (SDN) [1] concept tries to eliminate the vendor dependency via standard protocols, like OpenFlow [2]. However, the “traditional” non-SDN legacy networks need to keep the pace and respond to dynamic network changes. Network automation is a solution for Operational Expenses OPEX saving, improving not only the time spent for configuring the network devices, but also the efficiency of network maintenance through procedures that are easier to follow and implement at large scale. 95 10.1515/macro-2017-0011 Unauthenticated Download Date | 12/23/17 1:59 AM 96 P. Mihăilă, T. Bălan, R. Curpen, F. Sandu Network programmability [3] allows for reliable and dynamic infrastructure configurations by automating deployments, simplifying the network and reducing human generated errors [4]. All major vendors, including Cisco, started promoting the software configurability of networks (e.g. Cisco DevNet concept that promotes the creation of an open source community for network programmability [5]). All new automation implementations are based on generic programing methods (python, java) and standard interfaces (Secure Shell SSH or even RESTful webservices). For the relevance of the Python methods usage of network programmability we can mention the following Open Source and API tools available at Cisco Open Source Dev Center [5]: Yang/NetConf browser, OpenStack automation, network security and Big Data implementations. However, only the newer devices have support for the new programmatic methods (some deployed from centralized controller, like APIC-EM in case of Cisco), and this paper addresses methods to automate legacy network elements. The main objective of this paper is to demonstrate the efficiency of the scripting in configuring network devices. For that we have created an emulated network topology in GNS3, having as main element a Docker Container Ubuntu image, with the role of a network controlling element. We have controlled the network devices in a programmatic way using the Netmiko [6] and Paramiko [7] open source packages, based on Python. Futher we present the possibility of network programmability using abstracting methods and the concept of “driver”. We introduce a method implemented by the authors using the NTAF (Network Test Automation Forum) [8] standards, based on XMPP (eXtensible Messaging and Presence Protocol protocol) [9] and introducing the driver methodology that we plan to implement also with Python, by the use of NAPALM [10] library. 2. Network programmability using Python scripting languages: Netmiko and Paramiko At its core, network programmability [11] and automation has the main goal of simplifying the tasks involved in configuring, managing and operating network equipment, network topologies, network services and network connectivity. In our experimental setup we have used the GNS3 emulator which is a tool for building, designing and testing networks [12], capable now also to connect to external networks and allowing integration with virtual images or Docker Containers. Unauthenticated Download Date | 12/23/17 1:59 AM Network Automation and Abstraction using Python Programming Methods 97 A. Network setup For our specific implementation, we have used an Ubuntu Docker Container which is running Python scripts [13], allowing to connect to devices and automate their configuration via ssh connections. Python scripting is based on Netmiko [6] and Paramiko [7] libraries for controlling the network devices. Both Netmiko and Paramiko are using SSH connection to get the control of devices. SSH (Secure Shell) is a cryptographic network protocol for operating network services securely over an unsecured network. Paramiko is a Python implementation of the SSHv2 protocol, providing both client and server functionality. It is a pure Python interface around SSH networking concepts and it leverages a Python C extension for low level cryptography. [6] Netmiko is a multi-vendor library, based on Paramiko, simplifying connections across a broad set of networking vendors and platforms. The scripts incorporate various functionalities like VLAN creation, routing protocols or configuration backup. These scripts can be used for almost all network devices regardless of the vendor that produces them. [14] The topology contains an Ubuntu Docker Container [15][16] which will run the automated scripts for configuring network devices, a Layer 2 Switch (using real Cisco IOS) that is making the connection to the NAT Cloud (for having access to Internet) and to the three Layer 3 Switches that will be automatically configured (Figure 1). Figure 1: Network topology The Ubuntu Docker Container needs to be in the same network as the devices that we want to automatically configure so it can obtain an IP via a common DHCP or we can configure a static IP address. It also must be connected to Internet for downloading the necessary libraries. Unauthenticated Download Date | 12/23/17 1:59 AM 98 P. Mihăilă, T. Bălan, R. Curpen, F. Sandu Figure 2: Necessary libraries for Ubuntu Docker Container B. Python automation methods With the help of Netmiko and Paramiko, we have written a script that creates simultaneously VLANs on those three Layer 3 Switches. In Figure 3 we can see the script used to create multiple VLANs on a single switch. We have to specify the IP address configured on the switch, the username and the password configured for VTY lines and afterwards the connection via SSH could be done by transmitting those parameters to the switch using Paramiko library. When connection is successful, we have to specify the invoke_shell so we can directly configure the switch via SSH. Afterwards we have created a loop that creates VLANs from 2 to 10 (VLAN 1 is configured implicitly on every switch). At the end, we have close SSH connection via ssh_client.close call. Figure 3: Paramiko script for creating VLANs on a single switch Unauthenticated Download Date | 12/23/17 1:59 AM Network Automation and Abstraction using Python Programming Methods 99 Below we present another script using Netmiko that can create VLANs on a number of switches, available in the topology. Figure 4: Netmiko script for creating VLANs on multiple switches As we can see, the difference between Netmiko and Paramiko is that Netmiko uses an easier way to connect to switches using ConnectHandler which is also using SSH in the backend. In addition, when we use Netmiko we have to specify the device type that we want to control. With the script from Figure 4 we can create multiples VLANs on multiple switches. The main difference between this script and the one from Figure 3 is that in this script uses a variable (all_devices) which includes all the other three switches in this case. Afterwards, same like in the previous script, we have used a loop that is creating 9 VLANs (from 2 to 10). The example above implements a simple functionality, suitable for exemplification purposes, but the configuration possibilities are broad. We consider the two above mention Python implementations as a good alternative and less dependent of vendor specific commands compared to the “expect” method of TCL scripting language, very used by network administrators for automation. Unauthenticated Download Date | 12/23/17 1:59 AM 100 P. Mihăilă, T. Bălan, R. Curpen, F. Sandu 3. Abstraction of network equipment via the “driver” concept Another important aspect of heterogeneous networks is the possibility to program the network, independent of vendor specific functions. In one of our previous implementations [17] we have used the standardization provided by NTAF (Network Test Automation Forum) [8] that is using the concept of generic devices and specific drivers for automation. The NTAF driver concept was so generic that it had an example a Driver for a toaster (see Figure. 5) and was using as main protocol the XMPP [9][18]. The first set of specifications that we have also implemented were addressing the “Tool Registration, Discovery and Activation” and “Tool Automation Harness”. Figure 5: Generic driver concept, example for a toaster (source: NTAF) Previously successfully used for chat rooms, XMPP (Extensible Messaging and Presence Protocol) was proposed by NTAF for network automation, reusing social networking concepts. In our implementation, we have used NTAF used OpenFire as XMPP Server, and Spark as XMPP Client. The network elements were thus aggregated in a ”social network”, having all the integrated equipment listed in the Contact List displayed by Spark (see Figure 6). Network elements are publishing state/availability and capabilities using XMPP. Furthermore, we are able to send commands to an equipment from a chat window based on the XMPP-to-SNMP parser that we have implemented. Unauthenticated Download Date | 12/23/17 1:59 AM Network Automation and Abstraction using Python Programming Methods 101 Figure 6: Implementation of XMPP communication with network equipment using OpenFire XMPP Server: The network element is reachable via the Contact List of the Spark client Using NTAF standard via XMPP protocol we have automated different real, emulated (Cisco Dynapims images) and virtualized resources (Juniper Olive virtual images). However, the communication method to each device was unitary and vendor independent, as we are also counting on drivers (plug-ins). Based on the same driver concept (the concept that was so successful implemented in the case of Virtual Instrumentation and IVI Standardization – Interchangeable Virtual Interfaces) there are also programmable methods for network abstraction using Python. For our future work we plan to automate the network elements using the generic driver concept, based on NAPALM. Network Automation and Programmability Abstraction Layer with Multivendor support [9] is a Python library that implements a set of functions to interact with different router vendor devices using a unified API. The heterogeneous vendors are integrated via drivers, and NAPALM offers support for most of the important vendors. 5. Conclusions Software controllability is a concept that is spreading also in the area of networking, driven by the Software Defined Networks innovative implementations. Configuring and monitoring any device via automation, independent of vendors is a goal implementable not only on SDN devices, but also on other networking solutions. In this paper, we have demonstrated the Unauthenticated Download Date | 12/23/17 1:59 AM 102 P. Mihăilă, T. Bălan, R. Curpen, F. Sandu importance of automation in the “legacy” networks, that are not aware of OpenFlow SDN protocol. The legacy network equipment represents an important set of devices, produced by different vendors, very difficult to control using traditional methods and using unitary/standard methods. We have demonstrated that using Python, network engineers do not need to configure by themselves each individual device, they just need to create the proper infrastructure and by implementing automation scripting. The network controllability becomes easier and changes can be faster deployed, maybe even automatically, as response to events that take place in the network. So the legacy network elements becoming similar with SDNs. We have offered examples of two automation libraries based on Python and Secure Shell connections. Network programmability can be enhanced with the use of an additional abstraction layer, a driver, thus differences between proprietary solutions are eliminated. One proposed method of abstraction that was illustrated in an implementation based on NTAF standardization and the standard XMPP protocol. Organizations will benefit from an automation strategy with benefits on change control, architecture, security and operational management. Troubleshooting can be made easily and quickly when automated systems examine the network continuously. References 1. Software-Defined Networking: The New Norm for Networks. ONF White Paper. April 13, 2012 2. D. F. Macedo, D. Guedes, L. F. M. Vieira, M. A. M. Vieira and M. Nogueira, "Programmable Networks—From Software-Defined Radio to Software-Defined Networking," in IEEE Communications Surveys & Tutorials, vol. 17, no. 2, pp. 1102-1125 3. P. Chaignon, K. Lazri, J. Francois and O. Festor, "Understanding disruptive monitoring capabilities of programmable networks," 2017 IEEE Conference on Network Softwarization (NetSoft), Bologna, 2017, pp. 1-6. 4. Tischer R., Gooley J.: Programming and Automating Cisco Networks, Cisco Press, September 9th 2016 5. Cisco ”DevNet” Open Source Dev Center - https://developer.cisco.com/site/opensource/ 6. Netmiko, https://pynet.twb-tech.com/blog/automation/netmiko.html 7. Paramiko, http://www.paramiko.org/ 8. Network Test Automation Forum, NTAF White Paper. [online] Available: http:// www.ntaforum.org 9. XMPP - Extensible Messaging and Presence Protocol – https://xmpp.org 10. NAPALM (Network Automation and Programmability Abstraction Layer with Multivendor support) https://napalm.readthedocs.io/en/latest/ 11. Edelman J., Lowe S., Oswalt M.: Network Programmability and Automation, O’Reilly Media, Inc., 2017 12. GNS3 emulator, https://www.gns3.com/ Unauthenticated Download Date | 12/23/17 1:59 AM Network Automation and Abstraction using Python Programming Methods 103 13. S. Lowe, J. Edelman, M. Oswalt, “Network Programmability and Automation, Skills for the Next-Generation Network Engineer”, O'Reilly Media, December 2015 14. K. Jambunatha, "Design and implement Automated Procedure to upgrade remote network devices using Python," 2015 IEEE International Advance Computing Conference (IACC), Banglore, 2015, pp. 217-221. 15. Negus C., Henry W.: Docker Containers: From Start to Enterprise, Prentice Hall, September 21th 2015 16. Docker Container, https://www.docker.com/what-container 17. S Zamfir, T Balan, F Sandu, “Automating Telecom Equipment for Cloud Integration”, Review of the Air Force Academy, 2015 18. S. Bendel, T. Springer, D. Schuster, A. Schill, R. Ackermann and M. Ameling, "A service infrastructure for the Internet of Things based on XMPP," 2013 IEEE International Conference on Pervasive Computing and Communications Workshops (PERCOM Workshops), San Diego, CA, 2013, pp. 385-388. Unauthenticated Download Date | 12/23/17 1:59 AM