Reaction Forces in Beams: Support & Loading Analysis
advertisement

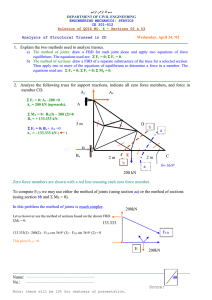
Reaction Forces in a Beam Subjected to Different Supports and Distributed Loading Hamaad Javed School of Mechanical and Manufacturing Engineering (SMME) Natioanl University of Science and Technology (NUST) H-12 Islamabad, Pakistan Humna Fatima School of Mechanical and Manufacturing Engineering (SMME) Natioanl University of Science and Technology (NUST) H-12 Islamabad, Pakistan hamaddj88@gmail.com humnafatima27@gmail.com Mowahhid bin Safdar School of Mechanical and Manufacturing Engineering (SMME) Natioanl University of Science and Technology (NUST) H-12 Islamabad, Pakistan Mowahhid84@gmail.com Muhammad Abdullah Zafar Ghauri School of Mechanical and Manufacturing Engineering (SMME) Natioanl University of Science and Technology (NUST) H-12 Islamabad, Pakistan mazghauri2004@gmail.com Muhammad Zain ul Abideen School of Mechanical and Manufacturing Engineering (SMME) Natioanl University of Science and Technology (NUST) H-12 Islamabad, Pakistan Mustafa Siddiqui School of Mechanical and Manufacturing Engineering (SMME) Natioanl University of Science and Technology (NUST) H-12 Islamabad, Pakistan zainhike82@gmail.com mustafasid1912@gmail.com Abstract—— Comprehending the behaviour of reaction forces in beams is rudimentary to the analysis and design of different structures in engineering. The study investigates the varying effects of different support conditions and distributed loading on reaction forces within a beam. The research employs analytical methods and computational simulations on software like ANSYS and SOLIDWORKS to reconnoitre the complex adaptability between structural elements and external forces. The investigation commences by examination of common support configurations such as simply supported, fixed, and cantilevered beams. While each particular scenario is subjective to a range of distributed loading patterns, representing real-world conditions encountered in engineering applications. The study brings into play different mathematical formulations and numerical simulations to analyse the resulting internal forces, focusing on reactions at the supports. The findings shed light on the nuanced relationships between support types, loading conditions, and reaction forces. Insights gained from this research contribute to the development of more accurate analytical models and aid engineers in designing structures that can efficiently withstand a variety of loading scenarios. The practical implications of these findings extend to a wide array of engineering disciplines, including civil, mechanical, and aerospace engineering, enhancing the understanding of structural behaviour and facilitating the optimization of design processes for improved safety and efficiency. Keywords— ANSYS, SOLIDWORKS, Reaction Forces, Beams, of the two can be considered the action, while the other is its associated reaction. • Distributive Loading: Distributed loads are forces which are spread out over a length, area, or volume. Most real-world loads are distributed, including the weight of building materials and the force of wind, water, or earth pushing on a surface. Pressure, load, weight density and stress are all names commonly used for distributed loads. Distributed load is a force per unit length or force per unit area depicted with a series of force vectors joined together at the top, and will be designated as w(x) to indicate that the distributed loading is a function of.x. For example, although a shelf of books could be treated as a collection of individual forces, it is more common and convenient to represent the weight of the books as a uniformly distributed load. A uniformly distributed load is a load which has the same value everywhere, i.e., w(x)=c, a constant. The magnitude of the distributed load of the books is the total weight of the books divided by the length of the shelf as: It represents the average book weight per unit length. Similarly, the total weight of the books is equal to the value of the distributed load times the length of the shelf or Internal Forces, Structural Behaviour I. INTRODUCTION • Reaction Forces: In accordance to Newton's Third Law of Motion of classical mechanics, all forces exist in pairs such that if one object exerts a force on another object, then the second object exerts an equal and opposite reaction force on the first.[1][2] The third law is also more generally stated as: "To every action there is always opposed an equal reaction: or the mutual actions of two bodies upon each other are always equal, and directed to contrary parts."[3] The ascription of which of the two forces is the action and which is the reaction is arbitrary. Either XXX-X-XXXX-XXXX-X/XX/$XX.00 ©20XX IEEE This total load is simply the area under the curve w(x), and has units of force. If the loading function is not uniform, integration may be necessary to find the area. [4] • Fixed Support: In the case of fixed support, the beam is firmly attached to a fixed support from where it has no chances of being subjective to slippage. For a fixed support analysis there are three unknowns. The reactions are the couple moment and the two force components (respectively along x-axis and y-axis), or the couple moment and the magnitude and direction of the resultant force. itself and perhaps a perfectly vertical load. As soon as a lateral load of any kind pushes on the structure it will roll away in response to the force. The lateral load could be a shove, a gust of wind or an earthquake. Since most structures are subjected to lateral loads it follows that a building must have other types of support in addition to roller supports. There exists one unknown force in roller support. The reaction is a force which acts perpendicular to the slot.[5] Fig.1 Diagrammatic Representation of Fixed Support and the Distributive Load subjected to a Beam • Pinned Support: A pinned support is a type of beam support which can resist both vertical and horizontal forces but not a moment. They will allow the structural member to rotate, but not to translate in any direction. Many connections are assumed to be pinned connections even though they might resist a small amount of moment in reality. It is also true that a pinned connection could allow rotation in only one direction; providing resistance to rotation in any other direction. The knee can be idealized as a connection which allows rotation in only one direction and provides resistance to lateral movement. The design of a pinned connection is a good example of the idealization of the reality. A single pinned connection is usually not sufficient to make a structure stable. Another support must be provided at some point to prevent rotation of the structure. The representation of a pinned support includes both horizontal and vertical forces. Fig.3 Diagrammatic Representation of Roller Support • Beam: A beam is a structural element that primarily resists loads applied laterally to the beam's axis (an element designed to carry primarily axial load would be a strut or column). Its mode of deflection is primarily by bending. The loads applied to the beam result in reaction forces at the beam's support points. The total effect of all the forces acting on the beam is to produce shear forces and bending moments within the beams, that in turn induce internal stresses, strains and deflections of the beam. Beams are characterized by their manner of support, profile (shape of cross-section), equilibrium conditions, length, and their material Fig.2 Diagrammatic Representation of Pinned Support • Roller Support: Roller supports are free to rotate and translate along the surface upon which the roller rests. The surface can be horizontal, vertical, or sloped at any angle. The resulting reaction force is always a single force that is perpendicular to, and away from, the surface. Roller supports are commonly located at one end of long bridges. This allows the bridge structure to expand and contract with temperature changes. The expansion forces could fracture the supports at the banks if the bridge structure was "locked" in place. Roller supports can also take the form of rubber bearings, rockers, or a set of gears which are designed to allow a limited amount of lateral movement. A roller support cannot provide resistance to a lateral force. Imagine a structure (perhaps a person) on roller skates. It would remain in place as long as the structure must only support Fig.4 A statically determinate beam, bending (sagging) under a uniformly distributed load II. PROBLEM ANALYSIS (A) Q. The truss shown consists of nine members and is supported by a ball and socket at B, a short link at C, and two short links at D. (a) Check that this truss is a simple truss, that it is completely constrained, and that the reactions at its supports are statically determinate. (b) Determine the force in each member for P=(-1200N)j and Q= 0 Equations of Analysis ΣFx=ΣFy=ΣFz=0 (1st Condition of Equilibrium should be satisfied) Στx= Στy= Στz=0 (2nd Condition of Equilibrium should be satisfied) • ΣFx=0 Bx=0 N • ΣFz=0 Dz=Bz=0 N • τCD=0 1.8By+1.2P=0 By= -800 N • τBC=0 -3Dy+0.75P=0 Dy= 100 N • ΣFy=0 By+Cy+Dy+P=0 Cy=100 N Analysis at B Joint Figure 5. Problem (A) Numerical Solution Figure 7. Free Body Diagram of B Joint and Reference Axis Joint B connects members BA, BC and BE Involving vector approach for the sake of ease, we may state the following results proceeding as follows: |AB|=√(0.6)2 + (0.75)2 + (3)2 Figure 6. Free Body Diagram and Reference Axis for Problem (A) AB = 3.15 m BC= 0.75m i BE= 0.6m k 𝐹 FAB= 𝐴𝐵 = 𝐹𝐴𝐵 (−0.19 𝒊 + 0.95 𝒋 + 0.24 𝒌 ) |AB| FBC= FBE= 𝐹𝐵𝐶 |BC| 𝐹𝐵𝐸 |BE| = 𝐹𝐵𝐶 𝒊 = −𝐹𝐵𝐸 𝒌 Performing ΣFy=0 |CE|=3.35m 0.95FAB+800=0 FAB=-842.11 N (Compression Force) Performing ΣFx=0 -0.19FAB+FBC=0 FBC=-160 N (Tension Force) Performing ΣFz=0 0.24FAB-FBE=0 FBE=202.11 N (Tension Force) FAC= 𝐹𝐴𝐶 3.317 = 𝐹𝐴𝐵 (1.2 𝒊 + 3 𝒋 + 0.75 𝒌 ) FAC = 𝑭𝑨𝑪 (0.362 i + 0.9 j +0.226 k) 𝐹 FCE= 𝐶𝐸 = 𝐹𝐶𝐸 (1.8 𝒊 + 3 𝒌 ) 3.35 FCE = 𝑭𝑪𝑬 (0.514 i +0.857 k) FCD=FCD k FBC= -160 i Performing ΣFy=0 0.9FAC+100=0 𝑭𝑨𝑪 = 111.11 N (Compression Force) Performing ΣFx=0 0.362FAC+0.514FCE-160=0 FCE=-3.3 N (Compression Force) Performing ΣFz=0 0.226FAC+0.587FCE+FCD=0 FCD=2.5 N (Tension Force) Simulation at B Joint Analysis at C Joint Simulation at C Joint Analysis at D Joint Figure 8. Free Body Diagram of C Joint and Reference Axis C joint is connected to members AC, BC, CE and CD |AC|=√(1.2)2 + (3)2 + (0.75)2 |AC|=3.317m |CE|=√(1.8)2 + (3)2 III. PROBLEM ANALYSIS (B) Q. The truss shown consists of nine members and is supported by a ball and socket at B, a short link at C, and two short links at D. (a) Check that this truss is a simple truss, that it is completely constrained, and that the reactions at its supports are statically determinate. (b) Determine the force in each member for P=0N and Q=(-900N k) Figure 9. Free Body Diagram of D Joint and Reference Axis Joint D connects DA, DC and DE |AC|=√(1.2)2 + (3)2 + (2.25)2 |AC|=3.937 m 𝐹 FAD= 𝐴𝐷 = 𝐹𝐴𝐷 (−1.2 𝒊 + 3 𝒋 + 2.25 𝒌 ) 3.937 FCD=225 N k FDE= -FDE i Performing ΣFy=0 3 F + 300N = 0 3.937 AD 𝐅𝐀𝐃 =-393.7 N (Compressive Force) Performing ΣFx=0 −1.2 F -FDE=0 3.937 AD FDE= 120 N (Tension Force) = -800 N • τBC=0 Figure 10. Problem (B) Numerical Solution Simulation at D Joint So, FAC = (40.222 i + 99.99 j +25.111 k) N FAB = (-154.3 i + 771.5 j +194.91 k)N FAD = (-120 i + 300 j +225 k) FDE= (-120 i) N FCD = (225 k) N FCE = (119.92 i + 199.94 k ) N FBE = (202.11 k )N FBC = (-160 i ) N Figure 11. Free Body Diagram and Reference Axis for Problem (B) Equations of Analysis ΣFx=ΣFy=ΣFz=0 (1st Condition of Equilibrium should be satisfied) Στx= Στy= Στz=0 (2nd Condition of Equilibrium should be satisfied) • ΣFx=0 Bx=0 N • ΣFz=0 Dz=Bz-900=0 N • τBEk=0 |AC|=√(1.2)2 + (3)2 + (0.75)2 =3.317 |CE|=√(1.8)2 + (3)2 =3.5 FAC= 𝐹𝐴𝐶 |AC| = 𝐹𝐴𝐶 (1.2 𝒊 + 3 𝒋 + 0.75 𝒌 ) 𝐹𝐴𝐶 (0.362𝒊 + 0.9 𝒋 + 0.226 𝒌 ) 𝐹 FCE= 𝐶𝐸 = 𝐹𝐶𝐸 (−(1.8)𝒊 + 3 𝒌 ) |CE| 3Dz-(-0.6Q)=0 Dz= 300N Bz= -600 N • τBEj=0 1.8Dy+1.8Cy=0 Cy= -Dy= -900 N • τBC=0 𝐹𝐶𝐸 (−0.514𝒊 + 0.857 𝒌 ) 𝐹𝐶𝐷= 𝐹𝐶𝐷𝑘 Performing ΣFy=0 0.9FAC-900=0 FAC=991.1 N (Tension Force) Performing ΣFx=0 0.362FAC+0.514FCE=0 FBC=-6.8 N (Compression Force) Performing ΣFz=0 0.226FAC+0.857FCE+FCD=0 FCD=3.5 N (Tension Force) -3Dy- 3Q=0 Dy= 900 N • ΣFy=0 By+Cy+Dy=0 By=0 N Analysis at C Joint Simulation at C Joint Analysis at D Joint Figure 12. Free Body Diagram of C Joint and Reference Axis Joint C connects members AC, BC, CE and CD Involving vector approach for the sake of ease, we may state the following results proceeding as follows: - Figure 13. Free Body Diagram of D Joint and Reference Axis Joint C connects members DA, DC and DE Involving vector approach for the sake of ease, we may state the following results proceeding as follows: |AD|=√(1.2)2 + (3)2 + (2.25)2 =3.937 𝐹 FAD= 𝐴𝐷 = 𝐹𝐴𝐷 (1.2 𝒊 + 3 𝒋 + 2.25 𝒌 ) Figure 14. Free Body Diagram of B Joint and Reference Axis Node B aligned members BE FAB=FBC=0 Analysis at E Joint |AD| 𝐹𝐴𝐷 (0.362𝒊 + 0.9 𝒋 + 0.226 𝒌 ) FCD=375 N FDE=-FDE 𝒊 Performing ΣFy=0 3 FAD+900=0 3.937 FAD= -1181.1 N (Compression Force) Performing ΣFx=0 −1.2 FAD- FDE=0 3.937 FDE=360 N (Tension Force) Simulation at D Joint Analysis at B Joint Figure 15. Free Body Diagram of E Joint and Reference Axis AE is zero force member. So, FCE = (359.7 i + 599.73 k) N FAD = (-360 i + 900 j +675 k) FDE= (-360 i) N FCD = (375 k) N FBE = (600 k )N IV. DOMINANT FACTORS FOR VARIATION IN THEORETICAL AND ANSYS SIMULATION • In theoretical calculations, the parameters of Modulus of Elasticity, shear stress and material type does not affect the results, but when simulating on Ansys, the results vary as all parameters come to account. • The truss is considered in equilibrium though it may not remain static after applied loads and forces. • Truss may be deformed which can be the reason for discrepancy in reaction forces. REFERENCES [1] [2] Taylor, John R. (2005). Classical Mechanics. University Science Books. pp. 17–18. ISBN 9781891389221. Shapiro, Ilya L.; de Berredo-Peixoto, Guilherme (2013). Lecture Notes on Newtonian Mechanics: Lessons from Modern Concepts. Springer [3] [4] [5] [6] [7] [8] Science & Business Media. p. 116. ISBN 978-1461478256. Retrieved 28 September 2016. This translation of the third law and the commentary following it can be found in the "Principia" on page 20 of volume 1 of the 1729 translation. https://engineeringstatics.org/distributed-loads.html https://web.mit.edu/4.441/1_lectures/1_lecture13/1_lecture13.html Vector Mechanics for Engineers: Statics", the 11th Edition, Ferdinand Beer and Russel Johnson R. Nicole, “Title of paper with only first word capitalized,” J. Name Stand. Abbrev., in press. [9] Y. Yorozu, M. Hirano, K. Oka, and Y. Tagawa, “Electron spectroscopy studies on magneto-optical media and plastic substrate interface,” IEEE Transl. J. Magn. Japan, vol. 2, pp. 740–741, August 1987 [Digests 9th Annual Conf. Magnetics Japan, p. 301, 1982]. [10] M. Young, The Technical Writer’s Handbook. Mill Valley, CA: University Science, 1989.