Coverage Path Planning for Mine Countermeasures:
Adapting Track Orientation
Veronika Yordanova, Bart Gips, Thomas Furfaro, Samantha Dugelay
NATO STO Centre for Maritime Research and Experimentation (CMRE)
La Spezia, Italy
{veronika.yordanova,bart.gips,thomas.furfaro,samantha.dugelay}@cmre.nato.int
Abstract—Capturing high-quality sonar survey data from autonomous underwater vehicles (AUVs) in complex environments,
with little to no a priori knowledge, requires built-in adaptations.
In particular, in order to locate objects that sit proud on the
sea-floor in areas of sand ripples, special trajectory adaptation is
required to mitigate natural shadow zones. Adaptive orientation
and track spacing are key capabilities, enabling effective search
strategies on the sea bottom. We present two methods for
adaptive AUV track orientation: the first approach improves
mission efficiency (in a resource-utilisation sense) by minimising
the number of AUV turns, whereas the second enhances the
data collection quality by adapting to sand ripples. A sensitivity
analysis compares the two methods and shows that changing the
track orientation during a mission is costly in terms of mission
efficiency. Results from our study suggest that the adaptation
should be applied once there is a considerable ripple field found
on the seabed, and should avoid changing the course multiple
times during the mission.
Index Terms—path planning, mine countermeasures, autonomous underwater vehicles, adaptive behaviour, sand ripples,
robots
I. I NTRODUCTION
Coverage planning or Coverage Path Planning (CPP) is the
problem of defining a path that passes over all points in a given
area. In general path planning problems [1] the goal is to move
from a starting point to a goal point. CPP can be seen as a
path planning algorithm with the objective of moving from a
starting point and reaching a goal point, where the goal point
is the last point of the area that is not yet visited or covered
by the vehicle sensor.
Typical applications for coverage planning are maritime
mine countermeasures (MCM), lawn mowing, vacuum cleaning, farming, painting and manufacturing [1]. The topic of
optimal coverage is well-covered in literature, typically via
the use of cost functions that reflect domain-specific needs.
A. Related Work
The first paper that gave classification of existing methods
and generalised the CPP problem is from 2001 [2], with a
more recent survey available from 2013 [3]. A CPP algorithm
This work is supported by NATO Allied Command Transformation (ACT)
Future Solutions Branch (FuSol).
https://orcid.org/0000-0002-0002-653X
Veronika Yordanova
Bart Gips
https://orcid.org/0000-0003-3392-216X
Thomas Furfaro
https://orcid.org/0000-0002-0561-6053
Samantha Dugelay
https://orcid.org/0000-0001-8932-3858
for an autonomous underwater vehicle (AUV) adapting to
an a priori known bathymetry map explored more closely
some of the specifics relevant to marine robotics [4]. In
addition, a path planning approach for bathymetric mapping
using an autonomous surface vehicle (ASV) presented the
benefits of building a model online, instead of using reactive
sensory triggers [5]. Methods from computational geometry
and manufacturing applications are commonly used in coverage planning algorithms for other robotics domains [6], [7].
In addition to the topics of CPP and moving platforms, the
literature on node placement in sensor networks can also be
relevant [8], despite that the nodes are usually assumed static.
The coverage and connectivity problems related to optimal
sensor placement in applications such as wireless networks,
satellite positioning and fault detection, can motivate CPP
solutions.
B. Mine Countermeasures — MCM
Naval mines are a hazard both in military and civilian
contexts, incurring significant risk to vessels operating in
mined areas. Mine countermeasures is a domain of maritime
security that relates to the detection, classification, identification and removal of naval mines. Mine clearance operations are
typically a costly endeavour, involving expensive specialized
assets deployed in hazardous areas over significant periods of
time. The use of autonomous systems can reduce the costs and
associated risks of performing mine clearance [9].
The specific jobs of detecting and classifying naval mines,
aboard both unmanned and manned systems, is typically
performed using underwater sonar technologies. Sonar can
help realise operationally feasible coverage rates over a survey
area, but suffer from typical problems associated with real
world high-density sensor data — incomplete coverage, environmental sensitivities, and limited effective envelopes for data
acquisition. This work is focused on an approach to performing
a sonar survey in an area, adaptively, to mitigate environmental
impact, leading to area coverage with an improved probability
of detection.
C. Coverage Path Planning for MCM
During an MCM seabed survey mission, the issue of
obstacle avoidance may generally be ignored. This reduces
the problem to taking into account only the boundaries of
an area when optimising the track planning. Relevant survey
Authorized licensed use limited to: Tsinghua University. Downloaded on November 09,2023 at 03:36:09 UTC from IEEE Xplore. Restrictions apply.
978-1-7281-1450-7/19/$31.00 ©2019 IEEE
parameters may be available a priori, such as geospatial and
temporal constraints. However, to improve data collection
quality, sensory information can be used to adapt the track
spacing and orientation of the path during a mission. Bottom texture and composition, water currents, bathymetry, and
sensor deterioration each impact survey quality and must be
accounted for. Being able to adapt to these factors allows for
optimising the data quality collection during a trial.
Ripples and currents influence the preferred orientation of
the vehicle tracks. Adapting the tracks to the ripple orientation
gives a better visibility to the sensor and increases the probability of target detection. Adapting the tracks to the water
current orientation gives better platform stability, which is
linked to higher-quality sensor data. Ripple [10] and current
[11] orientation have been treated as separate variables in
previous research.
The presence of Posidonia, a commonly-found genus of sea
grass, has been linked to reduced probability of target detection
in synthetic aperture sonar (SAS) data [12]. The detection of
Posidonia can drive a change in the track spacing variable.
One way is focusing resources by making the tracks tighter.
Another approach is accepting that the area is not suitable for
mine hunting and reducing the coverage quality by increasing
the track spacing. Sensor malfunction or deterioration can also
inform the track spacing of the vehicle. If a fault is detected,
this can signal that the effective sensor range has changed and
a new path with reduced track spacing should be generated.
The effect of a bathymetry change can be treated in a similar
way.
D. Sand Ripple Adaptation
We are interested in developing adaptive methods for autonomous MCM aimed at improved data quality. Since there
are different factors simultaneously affecting the choice of
parameters, in this paper we focus on the impact of sand
ripples on track orientation. We are not evaluating the gain
in data quality collection before and after adapting the vehicle
orientation to the sand ripples. Instead, we follow conclusions
from [12], where sonar data with sand ripples at various
angles has been analysed for the purposes of MCM. The paper
suggests that significant improvements could be expected if
the data is collected when the vehicle is moving such that the
side looking sonar sensors look down the ripple troughs. This
acquisition angle results in reduced shadows in the final sonar
images, and thus increased probability of mine detection.
E. Contributions
The question we address is “When should the AUV change
its tracks to align their orientation with the detected ripples?”
Since we are not evaluating the gain in data quality, our
cost metric is the additional number of turns, or equivalently,
additional track line segments, the vehicle needs to perform
once it diverges from the most efficient track orientation. For
the remaining of the paper, when “turns” or “tracks” are used
in the context of describing a cost function metric, they should
be considered interchangeable. We define an algorithm that
minimises the number of turns for a survey area based on
polygon altitude. We assume it is beneficial to change the
AUV’s track orientation once it detects a “consistent” sand
ripple area. The initial definition for “consistent” sand ripple
area we use in this paper is based on heuristics following a
recently-acquired data set. However, additional data is required
to define a better threshold for decision making.
The goal of this coverage path planning algorithm for an
MCM vehicle is to adapt the track orientation parameters
in order to improve the quality of collected data. Secondary
objectives include efficient data collection by avoiding path
overlap, minimising manoeuvres that do not allow data collection, and reducing time to completion. In this paper we
study the trade off between adapting the track orientation to
ripple fields and minimising turns.
II. M ETHODS
This section summarizes the methods that define and evaluate adaptive AUV track orientation. Our adaptive AUV track
orientation should consider two aspects. The first is mission
efficiency, i.e., the AUV should cover the survey area using
the fastest/shortest possible trajectory. The second, often competing aspect, is data quality. The track line segments should
be chosen in such a way to achieve the highest possible data
quality, in this case by following the direction of the sand
ripples.
A. Improving Mission Efficiency: Minimising the Number of
Turns (Polygon Altitude Method)
During an MCM mission, SAS data is traditionally collected
only when the vehicle is moving in a straight line. Processing
SAS data while the vehicle is turning, would require circular
SAS processing [13], [14]. However, this method is still
in development, so we treat the AUV turns as a mission
resource loss. The number of turns an AUV has to make
while surveying an area is related to the time it takes to
complete a mission, and hence to the resources used for the
task. Minimising the number of turns is one way of improving
the mission efficiency.
We have developed an algorithm that minimises the number
of AUV turns when surveying a convex polygonal area. The
design of the algorithm was shaped by specifics related to
MCM applications, and ease of use and implementation on
existing systems. The input of the algorithm is a list of coordinates defining the survey area. The output is a list of sequential
waypoints that define the survey legs. The algorithm adapts the
tracks to the sensor nadir range (rmin ) and maximum sonar
operational range (rmax ). The tracks are generated in pairs to
cover the nadir zone. The algorithm we propose in this paper
adapts the orientation of the tracks, but spacing is predefined.
Adaptive track spacing will be addressed in the subsequent
development of the algorithm, outside of this paper’s scope.
We used the idea of polygon altitude, introduced in robotics
coverage applications in [6], [7]. Finding the minimum altitude
corresponds to identifying the orientation of vehicle tracks resulting in area coverage with minimum turns. Polygon altitude
Authorized licensed use limited to: Tsinghua University. Downloaded on November 09,2023 at 03:36:09 UTC from IEEE Xplore. Restrictions apply.
B. Improving Data Quality: Sand Ripples Adaptation
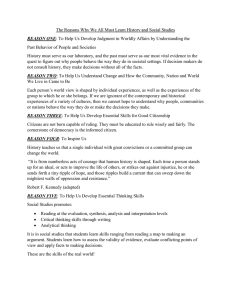
Figures 1 and 2 show maps of sand ripple intensity and
angles based on SAS data collected at sea. We used this data
set as an input to test the through-the-sensor track orientation
approach.
Based on the approach described earlier, given the mission
survey area, we defined an initial coverage path that minimises
the number of turns. We “fed” the simulated AUV with
windows of the ripple intensity (Figure 1) and the ripple angle
(Figure 2). The dimensions of this window matched the sensor
coverage range. In this way, we simulated sequential data
1 Using standard geometry notation where h usually denotes height and
altitude.
1750
0.8
1500
Y (metres)
1250
0.6
1000
750
0.4
500
0.2
250
0
0
0.0
250 500 750 1000 1250 1500 1750
X (metres)
Fig. 1. Ripple intensity in SAS data.
90
1750
Y (metres)
is defined as the perpendicular segment between two parallel
lines that bound a polygon. The altitude length depends on
the angle, θ, formed between the x axis of the polygon and
the altitude segment. The altitude is a continuous function
with respect to θ, which means there are an infinite number
of possible altitudes. Others have proven that the minimum
polygon altitude corresponds to θ being orthogonal to one of
the polygon edges, [6]. This result simplifies the problem down
to computing the altitude with θ = π/2 for all polygon edges
and taking the minimum. For the current MCM survey area
application, which is a simple, convex polygonal area, this is a
trivial computation. However, the method scales for polygons
with holes and can be extended to non-convex polygons, as in
[6], [7], which will be useful once we introduce multi-vehicle
operation and exclusion zones in the future.
We derived the relationship between a polygon altitude h 1
and the number of track lines when operating an AUV with a
SAS sensor (applicable to any sensor with a nadir zone):
k
j
h
(1)
2n =
3rmax − rmin
where n is the number of tracks required to cover the survey
area, h is the altitude , rmax is the sensor range and rmin is
the nadir range.
Since there is a nadir zone underneath the vehicle, that is not
covered by the sensor during the current track line execution,
this coverage gap needs to be filled by a subsequent track line.
This drives the need for having paired track lines, hence the
2n term in (1). At the end of the survey area, a pair of tracks
often does not fit. To avoid unnecessary overlap, we took the
floor function in (1) and we treated the end of the survey area
as a special case where an additional track line can be added
to the overall count. This effect can be seen in Figure 3 and
is briefly discussed in the next section.
The minimum polygon altitude approach gives the track
orientation for area coverage with minimum number of turns.
This can be interpreted as the most efficient coverage path,
given our definition for a cost function. Such path is useful at
the beginning of the mission, when there is no information collected about the seabed or the environment. We also used this
path as a metric to compare the efficiency loss when changing
the track orientation to align with the ripple orientation.
1500
60
1250
30
1000
0
750
30
500
60
250
0
0
250
500
750 1000 1250 1500 1750
X (metres)
90
Fig. 2. Ripple orientation (degrees) — angle of ripples in SAS data. Note that
angle values for areas with low corresponding ripple intensity value (Figure
1) are virtually meaningless.
collection as would be the case in an actual survey mission.
The AUV needs to decide when it has observed “enough”
ripples with “consistent” orientation to justify redefining its
path with a new track orientation, which may be suboptimal
from a resource utilisation perspective, but may provide higher
quality data. The effect of increasing the number of turns is
discussed in the next section.
In order to define a trigger for ripple track adaptation,
we first thresholded the intensity map to create a binary
map indicating if there are ripples detected within the sensor
field of view. This threshold gave an indication if there have
been “enough” observed ripples. The metric for “consistent”
orientation is the variance of the ripples’ angle, σ 2 . We
combined the two metrics to define the trigger for changing
vehicle orientation by multiplying the masked ripple presence
map with (1 − σ 2 ). The ripple angle variance falls within the
interval (0, π 2 /12], it is minimal when the ripple orientation
distribution approaches a Dirac delta function, and is maximized when the ripple orientation is uniformly distributed
Authorized licensed use limited to: Tsinghua University. Downloaded on November 09,2023 at 03:36:09 UTC from IEEE Xplore. Restrictions apply.
across the SAS image. This in turn means that the trigger
value is in the interval [0.178, 1]. One of the limitations of
this approach is the thresholding for the binary map and the
adaptation trigger are based on the current data set and does
not necessarily scale to other inputs. However, this paper aims
at evaluating the cost of adaptive track orientation, rather than
defining metrics that evaluate the sensor data.
area of the sea trial where the data from Figures 1 and 2 was
collected. The simulated mission path starts from the red mark
and ends at the blue. The position of the last track line follows
a special case related to Equation 1, where a pair of tracks did
not fit the area and an additional track was scheduled to cover
the nadir.
C. Ripple map statistics
1750
While the methodology for automated detection of ripple
presence, their intensity and their angle is outside the scope of
this paper, we briefly summarize our current approach which
will be expanded on in future work [15]. We use logistic
regression [16] to classify between absence and presence of
sand ripples. This yields us with an estimated probability of
sand ripple presence, which in this work we use as a proxy for
“ripple intensity”. We use fractal dimensionality [17] metrics
as predictive features. As suggested in [17] we used three
different length scales (1:2, 2:4, and 4:8 pixels respectively)
for which we computed the fractal dimension for both a lower
and upper surface, split up in horizontal and vertical directions.
This gave us a total of 12 different features per pixel.
We trained the logistic regression model through the use of
15 example SAS tiles where the pixels containing sand ripples
were manually flagged. The weight parameters of the logistic
regression model were set to their maximum likelihood values
given our training dataset using Newton’s method.
Ripple orientation was estimated on the level of individual
SAS images. This was done by first masking the sonar image
by multiplying it with the ripple intensity values as predicted
by the logistic regression. In this way we generated an artificial
SAS image where all details, save for the sand ripples, were
suppressed. From this artificial image we generated a power
spectrum of the spatial frequencies in the image through a 2D
Fourier transform. The ripple angle was estimated by finding
the angle at which the power peaked in the spatial frequency
interval [0.5, 2.5] m−1 .
1500
III. R ESULTS
Evaluating the two approaches we presented in the previous
section, using the data from Figures 1 and 2, does not provide
a general solution, as they are applied to a single data set.
However, the results give an indication of how different the
vehicle path becomes, if we change the trigger of the adaptive
ripple adaptation. We show the effect by inputing the data in
a different sequence.
In order to compare the added cost for changing the track
orientation, we show a sensitivity analysis of how the number
of tracks varies as a function of track orientation angle, given
a constant area size.
A. Evaluating Adaptive Track Orientation based on Input
Data
The tracks for a simulated mission when only polygon
adaptation is applied (i.e. without the ripple adaptation) is
shown in Figure 3. The size of the polygon matches the survey
Y (metres)
1250
1000
750
500
250
polygon adaptation
start path
end path
0
0
250 500 750 1000 1250 1500 1750
X (metres)
Fig. 3. Tracks adapting to polygon shape.
The background of Figure 4 shows a binary map based on
Figure 1 that was used as a data input for the adaptive track orientation. The simulated mission started with the orange tracks,
the same as in Figure 3, following a path, based on the polygon
altitude approach with the aim of minimising the number of
turns. Once the ripple adaptation trigger was reached, a new
path (green) was defined with track lines following the angle,
computed from Figure 2. In Figure 4(a), it took the simulated
AUV four track lines until it identified a significant number
of ripples to justify the change in track orientation. In Figure
4(b), it took only one track line as in this case the AUV had
started in an area with strong ripple intensity, and therefore
ripple adaptation was triggered immediately after the first leg.
Notice the new tracks overlapped with the old orange track,
as the nadir needed to be filled. The number of tracks for
a simulated mission when we only performed the polygon
adaptation (Figure 3) was 10. This number grew to 13 in
Figures 4(a) and 4(b), with track angles of 37.2 and 40.7
degrees (with respect to the X/East axis).
Since the resulting number of tracks between the examples
in Figures 3 and 4 is similar, we defined a secondary metric
to compare the trajectories — the effective mission path
length. We summed the length of each track that contributed
to the data acquisition, and excluded the line segments that
were simply connecting the acquisition tracks. The results
are summarised in Table I, where the rows correspond to
each of the figures, and the columns show the path length,
in kilometers, of segmented (polygon and ripple adaptation)
and overall paths.
The path length from Figure 3, with only polygon adaptation
Authorized licensed use limited to: Tsinghua University. Downloaded on November 09,2023 at 03:36:09 UTC from IEEE Xplore. Restrictions apply.
1750
1500
Y (metres)
1250
1000
750
500
polygon adaptation
ripple adaptation
start path
end path
250
0
0
250 500 750 1000 1250 1500 1750
X (metres)
(a)
1750
1500
Y (metres)
1250
B. Evaluating Adaptive Track Orientation using Sensitivity
Analysis
1000
750
500
polygon adaptation
ripple adaptation
start path
end path
250
0
0
250 500 750 1000 1250 1500 1750
X (metres)
(b)
Fig. 4. Triggering adaptive track orientation: (a) Track orientation changed
after 4 lines, (b) Track orientation changed after 1 line.
TABLE I
PATH LENGTH IN
Figure Name
Figure 3
Figure 4(a)
Figure 4(b)
applied (18.02 km), is significantly longer than the paths
resulting in the figures with segmented area (15.77 and 16.63
km). This is due to the greedy algorithm used for track
placement, where the additional line covering the nadir zone in
Figure 3 brings significant overlap loss. In order to avoid such
dependency on area size and track spacing, and only focus
on evaluating the track orientation loss measured in number
of turns, the subsequent sensitivity analysis is performed for
an unrealistically large area. Another contribution to the path
length difference is that the angle of the ripple adaptation
coincides with the diagonal of the survey area, which results in
a path with reduced length. If the turns were not a major loss
contributor, this track orientation would be the preferred one to
improve path efficiency. As an example of a turning loss, the
MUSCLE vehicle, used by CMRE for MCM, has a minimum
turning radius of 10 metres, with sections of 50 metres length
before and after the turn to allow for manoeuvring transients.
Another conclusion from these results is that minimising the
number of turns and tracks is not equivalent to minimising the
total path length. For small vehicles, which handle turns easier,
or if their sensor is not dependent on moving in a straight line,
a different cost function, based on total path length might be a
better solution for maximising resource efficiency in coverage
planning.
KILOMETERS FOR
Polygon
Adaptation
(orange)
18.02
7.21
1.80
F IGURES 3, 4( A ), 4( B )
Ripple
Adaptation
(green)
0
8.56
14.83
Overall
18.02
15.77
16.63
Adapting the AUV track orientation to ripples improves the
quality of collected data [12]. However, this adaptation may
reduce the efficiency of the mission by requiring additional
tracks to survey the same area. We quantify the efficiency loss
by performing a sensitivity analysis. We compare the number
of tracks an AUV makes when it adapts the track orientation
to a single angle (e.g. when only ripple adaptation is applied),
with the number of tracks necessary when both polygon and
ripple adaptation are applied in different regions of the survey
area.
Figure 5 is an example of separating the survey area into
a ripple field (green) with tracks following the ripple angle,
and ripple-free space (orange), where the tracks minimise the
number of turns. Such scenario could arise if we have seabed
characterisation information in advance, or if we perform
initial exploration, followed by modelling the expectation,
resulting in two distinct regions: one with ripples at specific
angle, and one without. We explore the benefit of segmenting
a survey area into ripple and ripple-free regions and adapting
the track orientation accordingly.
The number of green tracks in Figure 5, adapted to ripples
is 30 and the number of tracks in the orange ripple-free region
is 25. In total, the number of tracks is 55. If all tracks in the
survey area are aligned with the ripples’ angle, this also results
in 55 tracks. The ripples’ angle in this example is 30 degrees
but if we change it, the number of tracks in the ripple region
varies significantly.
Figure 6 shows a sensitivity analysis of how the number of
tracks changes as a function of the ripple angle. The area size
Authorized licensed use limited to: Tsinghua University. Downloaded on November 09,2023 at 03:36:09 UTC from IEEE Xplore. Restrictions apply.
10000
Y (metres)
8000
6000
4000
2000
adapted to polygon
adapted to ripples
0
0
2000 4000
X (metres)
Fig. 5. Tracks adapting to 30 degrees ripple field (orange) and tracks
minimising the number of turns (green).
and segmentation from Figure 5 are used. While the results we
show are related to angles and size in this specific geometry,
the conclusions are made based on the relative efficiency loss.
65
ripple orientation
ripple & min tracks orientation
60
Number of tracks
55
50
45
40
35
30
25
0
30
60
90
120
Angle of ripple field (degrees)
150
180
Fig. 6. Comparison between the number of tracks with ripple adaptation and
minimum turns adaptation as a function of ripple angle.
The first scenario in Figure 6, shown in blue, is when the
AUV surveys the whole area at a predefined angle. This would
be the case if we know the orientation of the ripple field at
a predefined angle, i.e. we assume the survey area is filled
with ripples with a particular orientation. If we compare the
best and worst scenarios, the vehicle will have to make more
than double the number of tracks if its tracks are oriented at
20 degrees, compared to when the tracks are at 90 degrees.
The latter case coincides with the minimum tracks solution
based on minimum polygon altitude, and is the most efficient
path to cover the survey area. This shows the importance of
adapting the track orientation to the survey area shape. If there
is no initial information about sand ripples, or other factors
requiring tracks at a specific angle, the vehicle should choose
the most efficient track adapting to the polygon shape. The
loss of doing an additional turn is heavily dependent on the
type of AUV in question. In the case of MCM and using a
SAS sensor, our CMRE MUSCLE AUV is large, with a wide
turning radius, which results in a considerable loss for every
additional turn.
The second scenario (red curve in Figure 6), reflects the situation in Figure 5, i.e. the AUV’s trajectory is optimised in the
ripple-free zone (orange) using the minimum polygon altitude
method at 90 degrees, but the AUV adapts its trajectory locally
in the zone with ripples (green). We vary the orientation of
the ripples in this zone along the x-axis in Figure 6 as before.
After seeing how inefficient some track angles can be in the
previous scenario, here we are interested in finding out if it is
worth changing the track orientation when transiting from the
ripple zone to the ripple-free zone. This situation could occur
as in Figure 4(b), where the vehicle would notice its survey
area in the south is ripple-free.
The orange tracks in Figure 5 adapt to the optimal direction,
given the polygon size, so their contribution stays constant
when computing the number of tracks result in red in Figure
6. All the variation is caused by the green tracks, those that
were adapted to the ripple angle.
The minimum of the red curve is at 60 degrees, which
coincides with the angle of the hypotenuse of the triangular
ripple zone. This is the track orientation with minimal number
of track lines that surveys the ripple zone at 60 degrees and
ripple-free zone at 90 degrees. This result follows the intuition
of the minimum polygon altitude applied separately for the two
zones. The reason the red line minimum is not at 90 degrees,
as with the blue result, is that here we have segmented the
area and the AUV is surveying the two zones separately, rather
than merging them and reducing the tracks to a single zone
scenario.
The results between 60 and 90 degrees coincide with track
orientation aligning with the long edges of the ripple zone
polygon, hence they have the lowest number of tracks.
The red curve dips below the blue in the interval between
30 and 65 degrees. That is, in these cases it will be beneficial
to segment the survey area and move from ripple adaptation
back to polygon adaptation. Despite the fact that this result is
dependent on the selected geometry, it is an indication of how
costly it is to change the track orientation, and that there is
a limited use of defining segmented areas with different track
orientation.
When the orientation of the ripple field is between 90 and
180 degrees, the red and blue curves behave similarly, albeit
with an offset. While for other sections of the graph the effect
of the polygon shape was a leading cause for the number
of tracks, between 90 and 180 degrees, both the red and
blue results diverged almost equally from the optimal polygon
shape that minimised the turns. The offset was caused by the
addition of the constant number of tracks in the ripple-free
zone for the red result.
Authorized licensed use limited to: Tsinghua University. Downloaded on November 09,2023 at 03:36:09 UTC from IEEE Xplore. Restrictions apply.
As mentioned in the previous section, the path with minimum turns did not coincide with the path of minimum length.
In the blue scenario of Figure 6, we showed that surveying
the area at 90 degrees track orientation resulted in minimum
number of turns and tracks. On the other hand, this track
orientation coincides with the longest overall path. In this
scenario, the difference in length between the longest (at 90
degrees) and shortest path (at 40 and 140 degrees) is only
2.44%, as our intention was to separate the track length loss
from the loss due to number of turns. However, as seen in
Table I, the path length variation grows with smaller and more
realistic area sizes.
IV. D ISCUSSION AND F UTURE W ORK
Despite the efficiency loss from following the ripple angle,
the main goal for adapting the AUV tracks is improving the
data quality. We showed cases where the number of turns
doubled between the optimal polygon adaptation and adapting
to adverse ripple angles. In the overall optimisation question,
this is the cost element of the equation, and is what this paper
deals with largely. The other, very important element is the
benefit — that is, improved data quality leading to improved
detection results in areas with ripples that create shadow zones.
The analysis in [12] suggests expected quality improvement
from angle adaptation, however to our knowledge there does
not yet exists a quantitative measure.
Having a loss metric, such as the number of turns or
tracks, that is independent of the through-the-sensor variables
we are trying to adapt to, will be useful when we start
adding other sensory input. It will help to weigh different
contributions that might have competing objectives, such as
finding a compromise between adapting to ripples and sea
currents. In the likely case where we do not have enough data
to compare the gain in data quality, this will be especially
useful.
While our trigger for ripple adaptation is still an unstable
solution, it provides initial results for combining efficiency and
through-the-sensor methods. The next step is to understand
better the link between the intensity and variation of the
ripples, and the data quality gain. Another way of approaching
the problem is using a heuristic threshold based on models
for ripple extrapolation, or initiating an exploration mission to
gather seabed characterisation information before the coverage
mission begins.
V. C ONCLUSION
In this paper, we have discussed adaptive track orientation strategies for mine countermeasure using an autonomous
underwater vehicle. We proposed two adaptive methods: one
aimed at resource efficiency, and another at data quality. In the
resource efficiency approach, the number of tracks or turns the
vehicle makes are minimised. The only input to compute the
path is the area size and shape, making this strategy convenient
at the beginning of the mission. The data quality approach uses
through-the-sensor information about the sand ripple intensity
and orientation. The vehicle adapts its track along the ripples’
ridges so it can collect sonar data with fewer acoustic shadows
and increase the probability of mine detection. We combined
these methods and evaluated their performance simulating a
MCM mission and using real data. We compared the methods
by doing a sensitivity analysis of how the number of tracks
changes as a function of track angle.
We conclude that there is a limited gain in segmenting a
survey area into ripple and ripple-free adaptation as the adaptation is costly. However, if a ripple field is detected, the AUV
should adapt its track angle for the rest of the survey area,
rather than segmenting it, as the ripple-free zone is not affected
by the angle at which it is surveyed. Our key contribution is
quantifying the loss of adaptive track orientation approaches
and evaluating an initial implementation strategy.
R EFERENCES
[1] S. M. LaValle, Planning algorithms. Cambridge University Press, 2006.
[2] H. Choset, “Coverage for robotics — a survey of recent results,” Annals
of Mathematics and Artificial Intelligence, vol. 31, no. 1-4, pp. 113–126,
2001.
[3] E. Galceran and M. Carreras, “A survey on coverage path planning for
robotics,” Robotics and Autonomous Systems, vol. 61, no. 12, pp. 1258–
1276, 2013.
[4] E. Galceran and M. Carreras, “Planning coverage paths on bathymetric
maps for in-detail inspection of the ocean floor,” in International
Conference on Robotics and Automation (ICRA), pp. 4159–4164, IEEE,
2013.
[5] T. Wilson and S. B. Williams, “Adaptive path planning for depthconstrained bathymetric mapping with an autonomous surface vessel,”
Journal of Field Robotics, vol. 35, no. 3, pp. 345–358, 2018.
[6] W. H. Huang, “Optimal line-sweep-based decompositions for coverage
algorithms,” in International Conference on Robotics and Automation
(ICRA), vol. 1, pp. 27–32, IEEE, 2001.
[7] S. Bochkarev and S. L. Smith, “On minimizing turns in robot coverage
path planning,” in International Conference on Automation Science and
Engineering (CASE), pp. 1237–1242, IEEE, 2016.
[8] H. Djidjev, M. Potkonjak, F. Hu, and Q. Hao, “Dynamic coverage
problems in sensor networks,” in Intelligent Sensor Networks: The Integration of Sensor Networks, Signal Processing and Machine Learning,
pp. 459–477, CRC Press, 2012.
[9] S. Dugelay, D. P. Williams, T. Furfaro, J. Melo, V. Yordanova, C. Strode,
B. Gips, and Y. Pailhas, “Enabling autonomous mine countermeasures
for the NATO Alliance,” in 5th Underwater Acoustics Conference &
Exhibition (UACE), 2019.
[10] D. P. Williams and E. Coiras, “On sand ripple detection in synthetic
aperture sonar imagery,” in International Conference on Acoustics
Speech and Signal Processing (ICASSP), pp. 1074–1077, IEEE, 2010.
[11] D. P. Williams, F. Baralli, M. Micheli, and S. Vasoli, “Adaptive underwater sonar surveys in the presence of strong currents,” in International
Conference on Robotics and Automation (ICRA), pp. 2604–2611, IEEE,
2016.
[12] D. P. Williams, “Fast target detection in synthetic aperture sonar imagery: A new algorithm and large-scale performance analysis,” Journal
of Oceanic Engineering, vol. 40, no. 1, pp. 71–92, 2015.
[13] Y. Pailhas, Y. Petillot, and B. Mulgrew, “Increasing circular synthetic
aperture sonar resolution via adapted wave atoms deconvolution,” The
Journal of the Acoustical Society of America, vol. 141, no. 4, pp. 2623–
2632, 2017.
[14] T. M. Marston and J. L. Kennedy, “Volumetric acoustic imaging via
circular multipass aperture synthesis,” IEEE Journal of Oceanic Engineering, vol. 41, no. 4, pp. 852–867, 2016.
[15] B. Gips, “Bayesian seafloor characterization from SAS imagery,” in 5th
Underwater Acoustics Conference & Exhibition (UACE), 2019.
[16] C. M. Bishop, Pattern recognition and machine learning. Springer, 2006.
[17] D. Carmichael, L. Linnett, S. Clarke, and B. Calder, “Seabed classification through multifractal analysis of sidescan sonar imagery,” IET
Radar, Sonar and Navigation, vol. 143, no. 3, pp. 140–148, 1996.
Authorized licensed use limited to: Tsinghua University. Downloaded on November 09,2023 at 03:36:09 UTC from IEEE Xplore. Restrictions apply.