Steel Plate Engineering Data-Volume 2
Useful Information on the
Design of Plate Structures
Revised Edition-' 1992
Published by
AMERICAN IRON AND STEEL INSTITUTE
With cooperation and editorial collaboration
STEEL PLATE FABRICATORS ASSOCIATION, INC.
Revised December 1992
Acknowledgements
or the preparation of the original version of this te.ch.nical publication,
the American Iron and Steel Institute initially retained Mr. I.E. Boberg
and later obtained the services of Mr. Frederick S. Merritt. For their
skillful handling of the assignment, the Institute gratefully acknowledges its
appreciation.
F
The Institute also wishes to acknowledge the important and valuable
contribution made by members of the Steel Plate Fabricators Association
and representatives from the member steel producing companies of
American Iron and Steel Institute in reviewing, and later revising and
updating, the material for this publication.
Appreciation is expressed to the American Institute of Steel
Construction, American Petroleum Institute, the American Society of
Mechanical Engineers, Business Communications, Inc., Chicago Bridge
and Iron Company, Pitt-Des Moines, Inc., U.S. Army Mobility Equipment
Command, and the American Water Works Association for their
constructive suggestions and review of this material. Much of the
illustrative and documentary material in this manual appears through their
courtesy.
American Iron and Steel Institute
The material presented in this publication has been prepared in accordance with recognized
engineering principles and Is for general information only. This Information should not be used
without first securing competent advice with respect to Its suitability for any given application. The
publication of the material contained herein is not Intended as a representation or warranty on the
part of American Iron and Steel Institute-or of any other person named herein-that this
Information is suitable for any general or particular use or of freedom from infringement of any
patent or patents. Anyone making use of this Information assumes all liability arising from such use.
AMERICAN IRON AND STEEL INSTITUTE
1101 17th Street, N.W., Suite 1300 Washington, D.C. 20036-4700
December 1992
jj
Introduction
olume 1 of this series, "Steel Tanks for Liquid Storage," deals with
the design of flat-bottom, cylindrical tanks for storage of liquids at
essentially atmospheric pressure. Steel plates, however, are used in a
wide variety of other structures, such as pipe, penstocks, pressure vessels,
stacks, elevated tanks, and bulk storage tanks. These structures present
special problems in design and detail, the answers to which are not readily
available without searching a number of sources. Volume 2 gives useful
information to aid in design of such structures.
V
Scope
Volume 2, "Useful Information on the Design of Plate Structures," does
not cover in depth the design of any particular structure. For example,
design of stacks involves problems of vibration that are beyond the scope
of this volume. Similarly, design of pressure vessels requires a detailed
knowledge of ASME, state and, sometimes, city codes. Designers should
work with the applicable code. Any attempt to summarize pressure-vessel
codes could be misleading and even dangerous, because of constant
revision and updating by the various regulatory bodies.
There are, however, many facets of plate design that are generally
applicable to many types of structures. Information on these is not now
conveniently collected in one source.
Drawing on many sources, this volume offers such information and
discusses some of the more commonly encountered problems. Included is
an outline of membrane theory, data for weld design, commonly used
details, plus data and mathematical tables useful in design of steel plate
structures. The intent is to include information principally pertinent to plate
structures. For convenience of users of this volume, some data readily
available elsewhere, particularly in mathematical tables, has been
incorporated.
Volume 3, "Welded Steel Pipe," and Volume 4, "Penstocks and Tunnel
Liners," of this series treat these applications in detail and are available
from Steel Plate Fabricators Association, Inc.
iii
Contents
Part
Part
Part
Part
Part
Part
Part
Part
Part
Part
I
II
III
IV
V
VI
VII
VIII IX
X
Flat Plates ................................. 1
Large Diameter Plate Tubular Columns .......... 7
External Pressure on Cylinders ............... 11
Membrane Theory .... . . . . . . . . . . . . . . . . . . . . .. 17
Self-Supported Stacks . . . . . . . . . . . . . . . . . . . . . . . 27
Supports for Horizontal Tanks and Pipe Lines ... 35
Anchor Bolt Chairs .......... . .......... . ... 49
Design of Fillet Welds . . . . . . . . . . . . . . . . . . . . . .. 53
Inspection and Testing of Welded Vessels ...... 63
Appendices ........ '....................... 65
v
Part ' l
Flat Plates
lat plates are used in many conventional
structural forms, such as plate girders, built-up
columns, or component parts of trusses. Such
uses are well covered in standard texts or
handbooks and are not discussed in this volume.
Instead, Part I will cover applications in steel tanks.
The mode of support and manner of loading
specified must be complied with if the stresses are to
be realized. No commercial edge fastening will
correspond exactly with the theoretical conditions.
The exact restraint of the edge, where bending is of
prime importance, will depend on the rigidity of the
support, the flexibility of any gaskets used, the
position of the bolting circle and the spacing of the
bolts therein, as well as the tightness with which the
joint is bolted up. When membrane action is of
importance, the degree of bolting up and the ability
of the reinforced opening to resist slight deformations
under radial tensions will largely determine the exact
stress in the plate and the corresponding
deformation. The bending moment at the edge is of
less importance than at points where plate resistance
depends primarily on bending. In view of these
remarks, the conditions "Fixed" and "Supported"
serve as guides to the possible range of stress and
deflection.
F
Bending Stresses and Deflections
Used as a membrane, as in the shell of a tank, a
steel plate is a very efficient member. In contrast, a
flat plate in bending normal to its plane is inefficient.
Circumstances, nevertheless, sometimes dictate the
use of a ' flat-walled tank because of space
limitations, or the storage of a corrosive liquid may
dictate use of a grillage-supported bottom to facilitate
inspection. In such cases, a stiffened flat surface is
indicated.
On the next page, formulas are given for
calculating the maximum bending stresses and
maximum center deflections of certain flat plates.
These formulas have been derived from various
sources, the most important being based on an
analytical derivation from elastic theory. However,
those relating to three classes of elliptical plates and
to certain others with a central applied load are less
rigid in their derivation though sufficiently reliable for
the use of the designer. It must be remembered that
all formulas apply to materials such as steel, for
which Poisson's ratio is 0.30.
The inherent limitations of these formulas must be
kept in mind. It is assumed that tensions in the plane
of the plate appropriate to membrane action are
small or negligible compared with the stresses due to
bending. In general, the deflection must be small
compared with the plate thickness if this is to be
true. For greater deflections, other more complicated
formulas must be used in whose derivation both
membrane and bending action are considered. The
formulas given may yield reliable working stresses
yet be absolutely unreliable in calculating the load at
failure and the corresponding deflection, particularly
in the case of materials which elongate materially
before failure, or which assume a dished form under
load through initial stressing beyond the elastic limit.
In general it must not be expected that these
formulas will yield stresses accurate to better than 5 0/0.
Notation
a
= length,
A
=
b
= length,
8
81
82
E
f
Fy
H
Ls
n
p
P
1
in., of semi-minor axis of supporting
ellipse for elliptical plates
length, in., of semi-major axis of supporting
ellipse for elliptical plates
in., of short side of rectangular plate at
supports
= length, in., of long side of rectangular plate or
side of square at supports
= factor for stress in uniformly loaded, fixededge, rectangular plates (Tables 1A and 18)
= factor for stress in uniformly loaded, simply
supported, rectangular plate (see Tables 1A
and 18)
= modulus of elasticity, psi
= maximum fiber stress in bending, psi
= specified minimum yield strength, psi
= uniform load, ft. of water
= stiffener spacing, in.
= alA or bIB
= uniform load or pressure, psi
= concentrated load, lb.
r
r'
R
S
~
<1>
<1>1
<1>2
<1>3
plate approaches a catenary between supports,
the support spacing is given approximately by the
following formula:
radius, in., of central loaded area
= i~side knuckle radius, in., for flat, unstayed,
circular plates
= radius, in., to support for circular plates
= spacing, in., of adjacent staybolts at corners
of square plates
= plate thickness, in.
= center deflection, in., of plate relative to
supports
= factor for stress in circular flanged plate
(see Table 1A)
= factor for deflection of uniformly loaded
fixed-edge, rectangular plates (see Tabl~s
1A and 1 B)
= f~ctor for deflection of uniformly loaded,
simply supported rectangular plates (see
Tables 1A and 1B)
= factor for deflection of fixed-edge,
rectangular plates subjected to central
concentrated load (see Tables 1A and 1B)
Ls =
(54,0:0
/2 ) ,12
Ls
(1-3)
112
= 900 1- = 2,076 1P
(1-4)
H
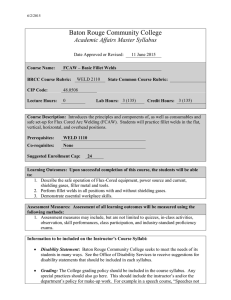
Figure 1-2 gives graphical solutions for Eqs. 1·3
and 1-4.
For the catenary approach, it is essential that
a lateral force of 10,OOOt be resisted at the
peripheral support. Since this is not always
practicable, application of the catenary approach
is limited. Similarly, it should not be used where
pressure is reversible or where deflection is
objectionable.
In the above discussion, only plate stresses
have been considered, and it is assumed that any
welded plate joints will develop the full strength of
the plate including appropriate joint efficiencies.
Also, the stiffener system should be in
accordance with accepted structural design
principles.
Protection against brittle failure of a structure
sho~ld be considered at the time of design. Since
environmental extremes, design detail, material
selection, fabrication methods and inspection
adequacy are all interrelated in protecting a
structure from such failure, these factors should
be evaluated.
(1-1)
For convenience in connection with tank bottoms,
the load can be expressed in feet of water, rather
than psi, in which case:
Ls = ( 124,6 15 t2) 1/2
H
2;')
Because of the approximate nature of the
solution, a conservative value for f is indicated.
Assu~ing f = 10,000t and E = 29,000,000 psi
for mild carbon steel, the equation becomes:
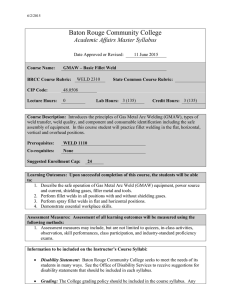
One of the most commonly encountered
conditions is a uniformly loaded flat plate
supported on uniformly spaced parallel stiffeners.
In the absence of any code or specification
requirement, assume an allowable bending stress
equal ~o 3/4 of the specified minimum yield stress
value In the plate for determination of stiffener
spacing Ls, in.
The plate stress can be obtained from the
formula in Table 1A for the case of a rectangle b
x B, where B = CD and b is taken as Ls. Thus,
for the fixed condition (continuous over the
supports), the maximum permissible spacing of
stiffeners becomes:
Ls =
~(
(1-2)
Figure 1-1 gives graphically stiffener spacing
determined from Eqs. 1-1 and 1-2 for an allowable
bending stress of 27,000 psi (i.e. Fy =36,000
psi).
If deflection exceeds t12, the plate will tend to
act as a membrane in tension and exert a lateral
pull on the outside support that must be taken
into account. An alternative solution, therefore, is
to assume that yielding does occur at the support
and the plate acts as a catenary between
supports. At intermediate supports, the tension in
the plate will be balanced; but at the outside
support, restraint must be provided to· resist that
tension. This is not always easily accomplished.
When the span is such that the profile of the
2
•
•
•
•I
I
I
CONTINUOUS BEAM
50
45
-.....
(1)
co
Note: Plate figured .. a oontlnuoua beam with a unit II.reaa
of 27,000 pel In bending. May be uaed for other
II.reaaea by varying H directly with unit strea•.
t = 5/16"
35
~
\t- 30
o
.....
(1)
25
- 20
(1)
u..
J:
...
"C
co 15
(1)
J:
10
5
,
,
,
I
I
I
I
I
I
40
'-
0
10
15
20
25
30
35
40
45
50
55
Support Spacing, Ls (in)
Figure 1-1. Stiffener Spacing for Flat Plate Acting as Continuous Beam.
CATENARY ACTION
50
10,000 t - - I - - _......- - i
Ls
45
-..... 4035 ~~_~
__
~~~_~~~~_ _~_ _ _~~~~on~~~~.(~~) ~ ~.(9~)
CO
~
\t-
O
.....
(1)
(1)
~
J:
...
"C
CO
(1)
.........
Caution: UN thla graph only to determine limiting
value. for comparison.
'(1)
~--- ~f-: l~, O~O
t = 7116"
30
NOTE: Platea IIgured .. a catenary at 10,0001
tension. End. must be reatralned and capable of taking
a horizontal pull par Inch of 10,000 time. thlckneea.
t
25
= 1/2"
20
15
J:
10
5
0
10
15
20
25
30
35
40
45
50
55
Support Spacing, Ls (in)
Figure 1-2. Stiffener Spacing for Flat Plate with Catenary Action.
I
60
,3
60
Table 1-1A. Flat Plate Formulas
Poisson's Ratio = 0.30
SHAPE
Loading
f
Fixed
R2
-r
t
0. 75P
Uniform
p
Circle
Radius
R
Fixed
Supported
1.43 [,og IO
(-~)+0.11 (fi)
P-;r
3
a
P2
Supported
0.420
Central
concen·
trated
p
Fixed
Supported
4
P
""1
13.1
P
2
0.42n + n + 2.5
Fixed
b2
B) p -
Uniform '
Supported
b2
B2 p...:...
(p) a
7
5~3
Supported
0.308
Fixed
n = a/A Ap;Jroximate
Fits n == 1, load over
0.01 %of area
Uniform
p
Uniform
2
~
¢(p)
-b
3 E t3
p
P
1.582"
t
Staybolts
spaced at
corners of
square of
sideS
0 .228
0.0138
t
.!.. +cP
O. '2S
S2
2t
E 78
~)
t)K
E
t3
E7
0.0284 (p) S4
1+~R
2
Fits n = 1 and n = 0
=
.
n ApproxlnJ(lte
t
f max. center of side
t
4
0.0443
PT
(R -~
(E.) £3
E
t
p
depend
2
on Bib. See Table 1 B.
b
.
B
= n Approximate
Fitsn = 1 andn = 0
2
0.287 p 2
Supported
¢2 and 8
B
t
_12
B'l
P
1.32"2
t
¢) and 8 I depend
on B/b . See Table 1 B.
b
p-
Fixed
Fastened
to
shell
(!)-;;4
t
Central
concen·
trated
P
Fits n :.: 0 and n == 1
n - alA Approximate
Fi ts n = 0 and n = 1
Load over 0.01 % of
area
(p)
b
¢
-2 E t3
P
6
a Exact
n=A SOlution
n = ~ Approximate
..
¢I
-;r
1 + 2.4n 2
4
E -;r
t
7
Square
Circular
Flanged
1.365
uniform over
circle, radius r.
Center Stress
As above
Center Stress
t
t
4 .00
P
1 + 2n2
Fixed
Supported
Flat
Stayed
Plate
£t.
t3
t2
p
BXB
0 .55 (p)
E
t2
Rect.angle
Central
concen·
trated
P
K3
*
t
50
4
...
0.22(1.)
E
3n 4 + 2n 2 + 3
max . at edge
f max. at center
2
+ n2 + 1
3n 4 + 2n2 + 12.5
Uniform
P
BXb
b<B
Pit 2
a2
6
3n + 2n2 + 3
4
p
a<
J
2
1.43'~OglO(;!r 0.334 + 0.06(~)2J ?'
Uniform
Ellipse
2A X 2a
A
2
P
Fixed
f
O:.695(£~
E t3
1.24pt
Remarks
R4
(~) ?
0.17
R2
Supported
Central
concen·
trated
P
on r
Center Deflection
~
In .
Maximum Fiber Stress, psi
Edge
Fixation
f max. of center
As above.
Deflection nearly
exact .
Approximate for J;
area of contact not too
small.
If plate as a whole de·
forms, superimpose the
stresses and deflections
on those for plate flat
when loaded.
¢varies with shell
and joint stiffness from
0.33 to C.38
Knuckle 8adius, r'
J]
*Formula of proper form to fit circle and infinite'rectangle as n varies from 1 to O.
tFormulas for load distributed over 0.0001 plate area to match circle when n
for stress when n = O. Stress is lower for larger area subject to load.
=1. They give reasonable values
tFormulas of empirical form to fit Hutte values for square when n = 1. They give reasonable values when
n =O. Assume load on 0.01 of area.
Apparent stresses only considered.
These formulas are not to be used in determining failure.
4
•
•
Table 1-1 B. Flat-Plate Coefficients
Stress Coefficients - Circle with .Concentrated Center Load
rlR
•
•
•
•I
I
•
•
•
•
•
•
•
•
1.0
0.10
0.09
0.08
0.07
0.06
0.05
0.04
0.03
0.02
0.01
Fixed l
0.157
1.43
1.90
1.57
1.65
1.75
1.86
2.00
2.18
2.43
2.86
Supported 2
0.563
1.91
1.97
2.05
2.13
2.23
2.34
2.48
2.66
2.91
3.34
3.0
4.0
5.0
Stress and Deflection Coefficients - Ellipse
1.0
Ala
1.2
1.4
1.6
1.8
2.0
2.5
1.42
0.322
1.54
0.350
1.63
0.370
1.77 1.84
0.402 0.419
1.91
0.435
1.95
0.442
2.00
0.455
00
Uniform Load'
Fixed.
Stress 3
0.75
Deflection 4 0.171
1.03 1.25
0.234 1.284
Uniform Load
Supported 5
1.24
1.58
1.85
2.06
2.22
2.35
2.56
2.69
2.82
2.88
3.00
Central Load
Fixed 6
Supported'
3.26
3.86
3.50
4.20
3.64
4.43
3.73
4.60
3.79
4.72
3.88
4.90
3.92
5.01
3.96
5.11
3.97
5.16
4.00
5.24
2.86
3.34
Stress and Deflection Coefficients - Rectangle
"
1.0
1.25
Stress 8 1
Stress 82
4
1 + 2n2
5.3
1 + 2.4n2
0.308
0.287
0.399 0.454
0.376 0.452
1.33
1.75
1.56
2.09
Deflection 4>1
Deflection 4>2
Deflection 4>3
0.0138 0.0199 0.0240
0.0264 0.0277
0.0443 0.0616 0.0770 0.0906 0.1017 0.1106
0.1261
0.1671
0.1802
Bib
IValues
2Values
3Values
4Values
·1.5
1.6
1.75
2.0
0.517
0.490
0.569
0.497
0.610
2.12
2.25
2.42
2.67
2.56
2.74
2.97
3.31
of 1.43 [Iog 1 0 Rir + 0.11 (rfR)2 1
of 1.43 [Iog 10 Rir + 0.334 + 0.06 (rfR)2 1
of 6/(3n 4 + 2n2 + 3)
of 1.365/(3n4 + 2n2 + 3)
2.5
3.0
5.0
00
0.713
0.741
0.74·8
0.500
0.750
3.03
3.27
3.56
3.70
4.00
3.83
4.18
4.61
4.84
5.30
0.0284
0.1336 0.1400 0.1416 0.1422
0.1843 0.1848
0.1849
SVaJues of 3/(0.42n4 +·nl + 1)
6VaJues of 50/(3n 4 + 2n2 + 12.5)
7Vawes of 13.1/(0.42n4 + n2 + 2.5)
5
4.0
•
•
•
•
•
•I, V
•
•I
,
•
•
•
•I
•
•I
Part II
Large Diameter Plate
Tubular Columns~~~~~~~~~~_
e
olume 1, "Steel Tanks for Liquid Storage,"
covered the design of cylindrical tanks
subjected to internal pressure. Cylinders (and
cones), however, may also be used as columns, in
which case they are subjected to axial compression .
This application is discussed in the following. The
cylinder-cone junction is discussed in Part V.
0L
Column Formulas for Circular Tubes
Small diameter pipe columns have long been
designed using conventional column formulas .
However, for tubular columns of relatively large
diameter and thin plate, when local buckling controls
the column strength, the conventional column rules
no longer apply.
The PIA::;; XY formula, developed in the 1930's
for mild carbon steels with minimum yield strengths
of 30-33 ksi, has been widely used for design of
carbon steel columns. It has been specified for
elevated tank column designs by AWWA and ~FPA
for the past 50 years.
Formulas suitable for use with carbon or alloy
steels having higher minimum yield strengths are
now available for use. The ASME code, section VIII,
Division 1 and the AISC specification for buildings
include such formulas, and AWWA is proposing them
for the next revision of the water tank standard.
The allowable stresses are applicable to axially
loaded cones if e s 60 degrees and R1 and t1, at the
point being investigated, are substituted for Ro and t
respectively, in the formulas.
The formulas for tubular columns are useful in
determining allowable axial and bending stresses in
many structures, such as tanks, buildings, stacks,
pipes and skirt-supported vessels. The requirements
of the specification, standard or code that is
applicable to the specific structure being designed
should be used to determine the allowable axial,
bending and combined stresses.
When forces due to earthquake or wind are
included, the allowable stresses may be increased by
113.
Only the Proposed AWWA and the AISC formulas
are presented here. Persons interested in the current
AWWA and the ASME formulas are directed to those
documents for information. Values of Fa for KUr = 0
for both the Proposed AWWA and the AISC formulas
Notation
A
= cross sectional
area of column, in. 2
=
n(Do - t)t
Cc
= column
slenderness ratio separating elastic and
inelastic buckling for AISC formulas
C~ = column slenderness ratio separating elastic and
inelastic buckling for Proposed AWWA formulas
D; = inside diameter of cylinder, in.
Do = outside diameter of cylinder, in.
E = modulus of elasticity, ksi
Fa = allowable axial compressive stress in the
absence of bending moment, ksi
Fb = allowable bending stress in the absence of
axial force, ksi
Fy = yield stress of steel being used, ksi
FS = factor of safety
I = moment of inertia of column, in.4 =
n(Do4
-
= half apex angle of cone, deg.
= critical local buckling stress for Proposed
AWWA formulas, ksi
D,A)/64
K = effective length factor
K~ = slenderness reduction factor for Proposed
AWWA formulas
M = moment at design point, in.-kips
P = vertical axial load on column, kips
Ro = outside radius of cylinder, in.
R1 = outside conical radius, in.
S = section modulus of column, in.3 =
n(D0 4 - D;4)/32 Do =21IDo
fa = computed axial stress, ksi = PIA
fb = computed bending stress, ksi = MIS
L = actual unbraced length of column, in.
r = radius of gyration, in. =1/4 v'D02 + D?
t = wall thickness of cylinder or column, in.
t1 = wall thickness of cone, in.
7
are shown graphically in Fig. 2-1 for Fy
in Fig. 2-2 for Fy = 36 ksi.
= 30
For tiRo ~ Fy 11650
Fb = 0.66 Fy
(2-13)
Fa = the value obtained from formula 2-11 when
KUr < Cc or from formula 2-12 when KUr";?
Ce·
Ce = ""'2 1(2 EIFy
(2-14)
ksi and
Proposed AWWA
(2-1 )
(2-2)
Fb= oLIFS
Fa = oLKetiFS
fe/Fa + ft/Fb s: 1
(2-3)
References
~ 34 ksi
tiRo Range
(} L
tiRo $ 0.0031088
3500 tiRo [1.0 + 50000 (tIRo)2) (2-4)
0.0031088 <tiRo <0.012 11.55+1476 tiRo
(2-5)
tiRo ~ 0.0125
30
For Fy
For Fy> 34 ksi
tiRo Range
(}L
tiRo $ 0.0035372
Formula (2-4)
0.0035372 ~ tiRo < 0.012 13.86 + 1771.2 tiRo
tiRo ~ 0.0125
36
FS = 2
C'c = ""'2 1(2Elo L
K", = 1-0.5
(2-6)
(2-7)
C'C)2
= 0.5 (KUr
Kef>
Proposed Revision to AWWA Standard 0100-84.
AISC 1989 Specification for Structural Steel
Buildings - Allowable Stress Design and Plastic
Design
when KUr~ C'c
(~~r
when KUr
~
when KUr
(2-8)
< C'c
(2-9)
25
AISC
Some of the formulas in the AISC Specifications are
presented in terms of Dclt. Those formulas, when
shown below, have been converted to tiRo terms, so
they are not in the exact same form as those in the
specification.
Members subjected to both axial compression and
bending stresses should be proportioned to satisfy
the combined stress requirements of the A'ISC
specification. The combined stress formulas are not
presented here so must be obtained from the AISC
specification.
.
The AISC specification contains no
recommendations for allowable stresses when tiRo <
Fy16500.
For Fy 16500 ~ tiRo < Fy 11650
Fb = 331 tiRo + 0.40 Fy
Fa = smaller of the value obtained
from formula 2·10 or
[
1 - (KUr)21 F
2Ce2
Y
J
when KUr
.§. + 3(KUr) _ (KUr)3
3
8Ce
12 1[2E
or 23(KUr)2
(2-10)
< Ce
(2-11 )
8Ce3
h KU > C
w en
r e
(2-12)
8
•
•
•
•
•
•I
~
20
18
AISC-
16
~
~
./"
---- ---- . /V
14
12
Fa
(ksi) 10
---- -----
~
k"
./
8
6
I
4
" "-PR OPOSE DAVM
/'
A
/
/
oV
2
o
0.004
0.008
I
II
•
•
,•
•
•
•
•
•
~
0.012
0.016
0.02
t/ Ro
KUr
= 0, Fy = 30 ksi
Figure 2-1
".
\ )'.
22
20
A1SC
18
-----
16
14
Fa 12
(ksi)
10
~
8
6
I
4
2
o
l(
o
/
/'
A
~
----------
~
~
!-""
~ -/~
V
i'-Pf ~OPos r-DAWV JA
/
-
L
0.004
0.008
0.012
t/ Ro
KUr
= 0, Fy = 36 ksi
Figure 2-2
9
0.016
0.02
.>
•
•
•I
•I C
•
•
•
•
•
•II
•
•
Part III
External Pressure
on Cyli nders ________________________
ylindrical vessels subjected to external
pressure must be designed as tubular
columns to resist axial loads imposed on the
heads. In addition, circumferential stiffeners may be
required to prevent buckling of the shell due to radial
pressure.
Is
I~
L
Ls
N
= external pressure, psi
Pa
= allowable external
pressure, psi
For a vessel with atmospheric pressure inside,
and greater than atmospheric pressure outside,
p and ' Pa refer to the gage pressure outside the
tank. For a vessel with atmospheric pressure
outside and a partial vacuum inside, p and Pa
refer to the partial vacuum inside the tank, in
psi, taken as a positive number. For vessels
which are simultaneously exposed to a partial
vacuum inside and greater than atmospheric
pressure on the outside, P and Pa should be
taken as the maximum difference in the inside
and outside absolute pressures.
t = minimum thickness, in., of cylindrical plate; or
for determining stiffener spacing, average
thickness, in., of unsupported shell between
stiffeners; or for short spans, thickness, in., of
middle quarter of span
t1 = weighted average thickness, in., of shell
between end stiffeners
!l = Poisson's ratio = 0.30 for steel
Notation
A
As
B
Do
Ro
E
F
Fa
h
p
= strain factor (see Fig. 3-1)
= cross-sectional area, sq in., of stiffener
= allowable pressure factor (see Fig. 3-1)
= outside diameter, in., of cylinder plate
= outside radius, in., of cylinder
= modulus of elasticity, psi
= safety factor wlrespect to predicted failure
= allowable unit stress, psi
= height or length, in., of cylindrical shell
between end stiffeners
= required moment of inertia of the stiffening ring
cross section about its neutral axis parallel to
the axis of the shell, in.4
= required moment 'of inertia of the combined
ring-shell cross section about its neutral axis
parallel to the axis of the shell, in.4
= design length, in., of cylinder = largest of
following:
Distance between head bend lines plus onethird depth of each head if there are no
stiffener rings
Greatest distance center to center between any
two stiffener rings
Distance from first stiffener to head bend line
plus one-third depth of head
= half the distance, in., from center of stiffener to
next stiffener or line of support on one side
. plus half the distance, in., to next stiffener or
line of support on the other side
= number of complete waves into which stiffener
ring will buckle
= number of waves into which unstiffened shell
between end stiffeners will buckle
Types of Pressure Vessels
With respect to the spacing and sizing of stiffeners,
cylindrical vessels may be grouped into three general
classifications:
A. Vessels designed for an external (or internal)
pressure greater than 15 psi. These are usually
subject to the rules of ASME Code. The code
provides a safety factor of 3 for stiffener spacing
based on buckling of the shell between stiffeners.
B. Vessels subject to both axial and radial/oads
and designed to operate at 15 psi or less. These are
not always specified to be in accordance with code
rules. When the external pressure approaches the
upper limit or the pressure cycle alternates between
internal and external, the stiffener design might best
be in accordance with code rules with a minimum
safety factor of 3. For less severe conditions, some
designers have reduced the safety factor to 2112 with
successful results.
C. Storage tanks of large diameter. These are
11
If A from Step 4 is to the left of the applicable
material/temperature line, then use:
_ 2AE
Pa - 3(Oclt)
(3-2)
sometimes subjected to relatively static, small,
external pressures that are radial only. Examples are
earth pressure on buried tanks, or granular or liquid
pressure on the inner shell of a double-walled tank.
In such cases, successful results have been
achieved with the stiffener design based on a safety
factor of 2.
It should be noted that the ASME code as well as
most of the experimental and analytical shell
buckling information aVpilable are for a uniform
round shell with uniform static loading. In the case of
a buried or submerged horizontal tank, or a vertical
tank subjected to wind loading, the external pressure
will vary around the periphery of the tank. In the
case of a partially buried vertical tank, varying
compaction and soil conditions may cause the
external pressure to vary in an irregular way around
the tank. Wind or water currents may produce
dynamic effects which would present problems in the
analysis. Any such variation in the loading, or any
significant deviation from a true circular shape, may
result in bending stresses in the cylindrical shell and
stiffeners, which are not accounted for by the
following analysis. Additional investigation may be
required in these cases.
The selection of the factor of safety in all cases
should take into account the consequences
associated with a failure of the structure, as well as
the accuracy of the analysis and accuracy and
duration of the loadings. Caution should also be
exercised in applying ASME design equations to
shells which do not meet ASME tolerances.
When t may be determined by factors other than
external pressure, then, for known values of Pa and
Do, and a known or assumed value of t, factor Bean
be determined from Eq. 3-1. The steps outlined
above can be reversed to determine stiffener spacing
from the corresponding UDo ratio obtained from the
chart.
ASME also provides charts for steels of other
strengths, as well as other metals and alloys. Where
pressure-vessel codes apply, reference should be
made to the latest edition of the code.
Sizing the stiffener rings as prescribed by ASME is
done as follows:
The required moment of inertia should not be less
than:
(3-3)
or:
s
Design of Pressure Vessels
A.
Step 6.
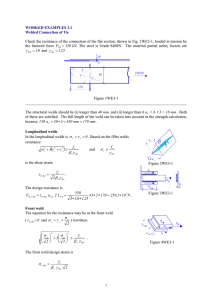
Step 7.
Using the value of A from Step 4, enter the
applicable material chart in Fig. 3-2. Move
vertically to the material/temperature line for
the maximum design temperature.
From this intersection, move horizontally to
the right and read value of B.
Compute the allowable external pressure
from the following formula:
Pa =
4B
3Delt
= DQ 2Lsft + A/LJA
10.9
(3-4)
The width of shell contributing to the combined
moment of inertia (Is') should not be greater than
1.10 VDot. Assume that half the width lies on each
side of the centroid of the ring, except that there
should be no overlap of effective widths between two
adjacent stiffeners.
The procedure for stiffener design is as follows:
Step 1. Assuming the shell has been designed, Do,
Ls and t are known. Assume a stiffener
section and determine its area, As, and
moment of inertia, Is. Then calculate B vom
pDQ ]
B = 3/4 [ t + AILs
(3-5)
Step 2. Enter the right-hand side of chart on
Fig. 3-2 at the computed value of B.
Step 3. Follow horizontally to the design
temperature line.
Step 4. Move vertically to the bottom of the chart
and read the value of A.
Step 5. Calculate required value of Is from Eq. 3-3
or I~ from Eq. 3-4.
Step 6. If Is required is greater or substantially less
than Is provided, assume a new section and
repeat the steps.
Step 7. If the value of B in Step 3 is below the left
end of the applicable material temperature
line, then use A = 2BIE.
Type B. Non-Code Vessels Subject to Both Axial and
Radial Loads. For pressure vessels, stiffener design
might best be in accordance with code rules with a
minimum safety factor of 3. Code charts, however, do
not include Delt ratios greater than 1,000 whereas
many non-code vessels are of .reJatively large
diameter and have Delt ratios greater than 1,QOO. In
such cases, internal pressure often controls shell
thickness. But even small external pressures may
require stiffeners because of the large diameter.
Design of types A, Band C vessels is discussed in
the following:
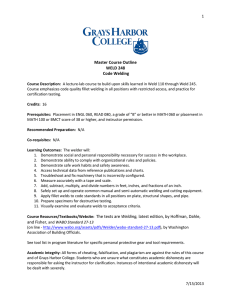
Type A. ASME Code Rules. To serve as an
illustration, Figs. UCS 28.1 and 28.2 and UGO-28.0
have been reproduced here as Figs. 3-1 and 3-2.
These charts are used to determine shell thickness
of cylindrical and spherical vessels under external
pressure when constructed of carbon steel having a
yield strength of 30,000 to 38,000 psi. The procedure
for using the chart is as follows:
Step 1. For the assumed t, determine ratios
UDo and Delt.
Step 2. Enter left-hand side of Fig. 3-1 at the value
of UD o.
Step 3. Move horizontally to the line representing
Delt.
Step 4. From this intersection move vertically
downward to determine the value of factor
Step 5.
I'
(3-1)
12
\
20.0
11.0
0 \
.•
\t\.lH-4-+,,-+1H-+-R--t-IrHH--+++++HH-H-+t-t-tt--r-t-t-t-ttt-t-t-rr-t-tt-rtM1tt-H
16.0 ~ - \-~-+-~44H+-I-l-+++-+-+-+H-HH++-+-+-+-H-tt-+-H-H-t1-t--t-1-t-i-tt--HH-tttt1
(
,
14.0
12.0
10.0
9.0
f
8.0
7.0
\
K.~\->\J.lr-\Hi~
\fH\-Ht-HH-+-H-+-1H-+H-H-tt-H-tH-tt-T-H-t-ttt1---Ht-Ht-HH1t1rt1
\
...\ I
~\ ~
~\
0
~
o
~
~
.. \
5.0
~
\
~O .'O~""
\
,
3.5
0
~
;
3.0
.
.
~
2.5 -
~
~
2.0
~..
I
I
I
•I
~
r\\ \
1\
\
1\ \
\
\
\
\
1\
\
\~
\
\
~
\
1.2
1
\
\
1\ \
\ \
\
r\ \. i\ \
\
~ \
.90
\
\
1\ \
\
r"\
\
\
1\
\
\
\
r"\
1\
r\
\
\
\
\.
\
\ \
\
\
~-:.. \
1\ \ .I ~
\ \: L
240'
1\
\
\"\
\
'.)~
~~ \,.;
\
"\ \
I\
~\O
r\
r\
\
\
\
\
\
r\ \
"\
\
\J
\
\
\
1\ \ \
\
1\
\
[\
I\.
~ \
\
\
\
I\. i\
\
\
\
1\
i\ \ \
\
\
\
1\
~_
~'.-
\
['\0
\
I\. \
\ J\
\
\
\
I ~
.60 t--+-+-+-+--I-t-+-~~-+-+-1f-l.cf-~\H--H.:-IH-l~\:-:4.~~~:-+--*+.1f+P+--+-~I~\~~+.-1=+W-i
\
\ \ \
\
, 1\ \
\
\ \ \
\~
.50 t--+-+-+-+--+-""';-+-H~\-f-1~~\r-+-1Ito\+TI\+-!-l+--+'-I\-1\r-+-Jod--''r-\.-+--+\M-!\o~\r-+--''r-T-I\~
' ~",_..
i
1\ \
\
\'
r \ \ . . . . . -""
'Jt-+-+-+-I-+-+-+-+-Hf-1l,,,,,~~--j-J~.,\~.,,,+-,,~\..:Ir4-l,-\+--4\-1I~
\~,\+l-1M1\-PI\~\-+-l\-f\M\~i-\~'-PI!li
\
.4Q
.J5
. ,
\
:::
1
~
\
\
"\
\
•
1\ ~ \.
\
1\ \ \
i\
1\:\ \ \ [\ \. \ \ \\ \r\ "
1\ \
1\,
\
r\
\
:\ \..
\1\
\r\i\ \ '\ \1\ i\ \[\ \
\ \\ '\ \ \'\
\
\ \ 1\
\\ ~ 1\1\ \
\1\ \\
.20
.18
. \6
1\
:)~J
\.~
~y/
~~'Z
"\' \ \ '\ . V.
0
I:'
,,
i\ 1\
\
r\ \
.1. t--t-+-+-+-~H-H-T+-+--+-I~~+-+-+rHflt-~~+-+-4r-++*+~~-+--f-Il'o,~~
.12
NOTE: Sec hble UGO·28.0 10' ubulM nlun
_\
1\
I\.
'\. \
1\ r..
.10
I
I
I
I
I
1\
\
1\
\
"\ \
\
\
\
\
1\ \ \ I\.
\ i\
f'
\
\
\
\.
r\ \
\
\
\
\
\
I\.
\ \
r\ \
\
\
\
1\
1\
\
\\
[\.
\
\. \
\\
\'\
\.
\
~
\
'\
1\
\
\
I\.
,I
\ \
_~
1\
1\
1\
~ r\ 1\
\ \ \. \
r\ \
I\"
1\
\ \ \ \
1\ \
\
\
\
' 1\
\
\
\
1\
r-..
\.
\
\
.80
.10
1\
\ \ 1\.\
\
\
\
\
~
1 \ \ _\
\
\
\
\
I\.
\
1.0
"\
1\
\
\
1.4
\
\
\
\
\ 1\
r\ r\
r\ \ ~ \
i\.
\
\
\
:::
·to
~
~~
-~
\
\
\
, • r\
--:
\
"\
,%\ \
\
1\
'\
~~,\ 1\
\
i\
\
6.0 r-" _ '0
(
\
\
\ \
\
I\. \
\ \~ .\
f\ 1\
I\.
t\ \
N
\~ _}:'~'
\ " !\'\
::~!=:~~=~:~~~\~v.~X~\~~~~~~~t§
t--:t-+-+-+-+-H-+-H+--+-+--1H--+-+++I\'%~-~1\~~~~~~~~
~~=t~:~
I 1\1 Il\ l\ I "I "\J I'\. Lf'.
.010
.060 t-+-+-+-+-+-t-+-+-H+--I-+--1I-+--+-+++t,1 }J
\
I -\
I'
1t -J...J.I.....".J.'IJ.J.JI
,osa _____~-'-'"""-........I..O-.I.___'"""-........'-'-........I-\....
U....ll..l.l_~II......I......J..ll_.l-.I.I.....I...I.I..I..~J..I.
II_"·_.J-...J
111.....J-..I..
345678V
.00001
.0001
3
~56}U
.001
3.56789
.01
3.,56789
.1
FACTOR A
Fig. 5-UGO-28.0 Geometric Chart for Cylindrical Vessels under External
or Compressive Loadings (for All Materials)
FIGURE 3·1
13
~TE;I s':' iabl~ ~d~d8~11t()( tabUI.J vJu~
-
I
~ ...
-
~
L--' :.-
16.000
...- ...-"- ":"1- JOO1F
, fo--
12.000
~~
.,;'"
/,
./
~
.........
I"
".
'11/
~
...
.-'"
~
.,.
.....
14.000
I
700 F
-I-
I I
., 900 F
.... r- V
10.000
9,000
800 F fo---
8,000
~--
.J#O .....
.,"
~
Ii",
E • 24.S x 104'
E • 22.8 x 10e
E - 20.8 )( 10'
.,..,.
L.-""
11
....... ,.,.
~
...".
.... i-'~
I I
....
-,.,-
.......
l,......- ........
~i'"
I
I
-~ ....
:...--~
~
.E • 29.0 x 10e
......... ...... I
E. 27.0 x 10e
.....-
20,000
18.000
I
up to :lOOF ~-
/
---. l..- I--
I
--;;.;,.
./
'1:
3
4 5 6789
.OO(X)1
a:
u
0
~
<
u..
::3.500
l-
3.000
r;
~
2.500
(A~
2
7.000
6.000
4.000
{/, '1/ ......
......... I: ~,
'h
/,
al
5,000
V
, ...
'I
2.000
2
:1
2
3 " 5 6789
4
5 6789
3
045&789
.01
.001
.0001
2
.1
FACTOR A
Fig. 5-UCS-28.1 Chart for Determining Shell Thickness of Cylindrical and Spherical
Vessels Under External Pressure When Constructed of Carbon Or Low-Alloy Steels
(Specified Minimum Yield Strength 24,000 psi To, But Not Including, '30,000 psi)
NclTE: I se!. iab'~ s-Ld~2'8~ 'f
Of'
25.000
t~ular' Val~.!
./
V
~
V.,.
~
1/",,"
/1
VI
~ ....
~
E - 29.0
27.0
eee-
x 10'
x 10' ...... 1-0....
x 10' ~ [j)
E - 20.8 )( 10'
I 1111'
2
.00001
"
.......
---
........
;;;;;;--
:-.-
~"...,.
-,...
..... ~
~-
...
20,000
18.000
V?OO F-
~~
16,000
----- ,.,.'"
-
... V
...". ~
... ...V
.............
...-
•
-
I
I I
I
I
~I
~
I
800 FII
J900 F_
~
----
104,000
12.000
~
............. ,...
;;.ii"
:1" 5 6789
.0001
rh
:/.
0
7.000
u..
6.000
....
.;'
5.000
~
4.000
3.500
'Ii'
3.000
~ 'I
2
JO.ooo
9.000
8.000
2.500
3
2
456789
3
4 5 6789
.01
.001
2
3
04 5 6789
.1
FACTOR A
Fig. 5-UCS-28.2 Chart for Determining Shell Thickness of Cylindrical and Spherical
Vessels Under External Pressure When Constructed of Carbon Or Low-Alloy Steels
(Specified Minimum Yield Strength 30,000 psi and Over Except for Materials Within This Range
Where Other Specific Charts Are Referenced) and Type 405 and Type 410 Stainless Steels
FIGURE 3-2
14
aJ
a:
~
U
~
JI/1.
"'r--. Illll
24.5 )( 10' 1-0....
22.8
'I
/
.-~
.- ........ ~
/
'I'
I,
II,
.-'"
---
V
....
., ~i"'"tptJ3lL
sao F-
«
Where this situation occurs, design may be in
accordance with the following discussion of type C
vessels If The Limitations Given Therein Are Followed.
Note that the curves in Fig. 3-2 based on material
strength (temperature curves) are not straight over
their entire length. The procedure outlined for type C
vessels is applicable only to the straight portion of
the curve, where most type C vessels will fall. If the
same rules were applied indiscriminately, inadequate
design could result.
Where the rules do apply to type B vessels, the
safety factor for stiffener spacing should preferably
be at least 3, but may be less at the designer's
discretion, depending on severity of loading, inherent
hazard, etc.
Type C. Storage Tanks of Large Diameter Subject
it is recommended that a minimum safety factor of 2
be used.
Some vessels may be subjected to external
pressures that vary from zero at an upper point on
the shell to a maximum at the shell-to-bottom
junction. For this type of triangular radial loading,
determination of the first lower unsupported span LS1
should be based on the pressure at the bottom. This
locates the first intermediate stiffener above the
bottom. Then, the next span LS2 should be based on
the pressure at the first stiffener. This procedure
should be repeated up the shell. For each span, the
thickness should be assumed as the thickness of the
middle quarter of the span, or the average thickness
of the plates in the span.
To prevent buckling of the intermediate stiffeners,
the moment of inertia should be at least:
to Radial Loads Only, or Small Vacuums Where the
Axial Load is Negligible. In determination of stiffener
I~
ring spacing, the safety factor of 3, as specified by
the ASME code, seems excessive for storage tanks
of this type. Furthermore, the code design of
stiffeners assumes that they will buckle into two
waves. Stiffeners on short tanks with large diameters
may be stayed so that buckling takes place in more
than two waves. In that case, design in accordance
with the code may be overconservative.
The following procedure was developed to provide
a more reasonable design basis for such tanks. In
using this approach, however, designers should
remember that it applies to a special situation,
frequently encountered, and is not a general solution
for all cylinders subjected to external pressure. (See
preceding discussion of type B structures.)
The procedure is based on the use of two end
stiffeners of sufficient strength to permit installation
of small intermediate stiffeners based on the wave
pattern postulated for the unstiffened shell between
end stiffeners. An .example for a vertical storage tank
would be incorporation of one end stiffener at the
bottom of the shell and one at the roof or at an
upper point of the shell where the radial external
pressure becomes zero. Intermediate stiffeners would
be located between these end stiffeners.
Do
t' 0:
l
(3-7)
In Eq. 3-7, computation of I~ provided may include a
portion of the shell :guivalent to the lesser of
1.1 t Dot = 1.56t Rot or the area As of the
stiffener.
The moment of inertia for intermediate stiffeners
attached to shells under radial pressure only or
under both radial and axial pressures should have a
minimum safety factor of 2.
In Eq. 3-7, N is an integer with approximate value
of:
N2 =
0.663 s: 100
(3-8)
v
r-IL
t' Do
h •
Do
To prevent yielding of the stiffener, it should also
satisfy the following requirement for minimum crosssectional area:
(3-9)
As = P.l::.8
Fa
where Fa should be taken as 15,000 psi for mild
carbon steel.
In determination of As provided, a width equal to
0.78 Rot of the available shell each side of the
stiffener should be included in the composite area.
To insure a nominal-size stiffener, in no case should
the area of the stiffener alone be less than half the
required area.
Both Eq. 3-7 and 3-9 are based on the assumption
that all the circumferential shell force is carried by
the stiffeners. This is a very conservative assumption
and could be relaxed with a more rigorous analysis.
v
Within the following limitations, the spacing Ls of
intermediate stiffeners may be determined from the
David Taylor Model Basin formula 1 (Eq. 3-6). The
formula, however, does not a2.Q!y if the resulting
spacing Ls is less than 0.9 vo;;t.The circumferential
stress in the shell alone, not including the stiffeners,
should not exceed the allowable working stress for
the shell material in compression.
The David Taylor Model Basin formula is:
f0.45 + 2.42E (tJDQ)2]
Fp (1 - ~2)O.7j
FpL s D Q 3
8E (N2 - 1)
Intermediate Stiffener Rings
h = • It
=
End Stiffener Rings
For the preceding design procedure for
intermediate stiffeners to apply, the ends of the
cylindrical shell must be held circular. It is assumed
that half the total external radial load on the shell is
transferred to the end stiffeners. This load is further
distributed to the end stiffeners in inverse proportion
to the ratios of their distances from the resultant of
the load on the shell to the distance between end
(3-6)
For shells constructed of mild carbon steel under
radial pressure only and for temperatures to 3DDoF,
1Col/apse by Instability of Thin Cylindrical Shells Under External
Pressure, by Dwight Windenburg and Charles Trilling.
15
assumed as part of the required area. Fa should be
taken as 15,000 psi for mild carbon steel.
stiffeners. The required moment of inertia for end
stiffeners therefore should be at least
I; =
Fph Do 3
16 E(N2_1)
(3-10)
Top Intermediate Stiffener Ring
For a cylindrical shell with external pressure on
only a portion of its total height, such as a partly
buried tank, additional consideration must be given
to the distribution of load to the end stiffeners. In any
case, always locate the top intermediate stiffener at
the surface elevation of the external pressure. N
should be taken the same as that recommended for
intermediate stiffeners (unless this stiffener is
assumed to be the end stiffener). The load on the
top intermediate stiffener depends on the distance
from this stiffener to the top end of the cylinder. If
this distance is greater than twice the greatest
intermediate stiffener spacing, assume that no load
is transmitted through the shell to the top end of the
cylinder. Therefore, the top intermediate stiffener
should be designed as a top stiffener. If this distance
is less than twice the greatest intermediate stiffener
spacing, the regular end stiffener design may be
provided at the top of the cylinder, while the load on
the top intermediate stiffener is computed as for the
other intermediate stiffeners.
For open top tanks, N for the top end stiffener
must be taken as 2. When the end stiffener is stayed
by a cone roof or radial framing, N equals the
number of rafters at the shell. For a flat bottom, a
full diaphragm, or a self-supporting roof, N should be
calculated in the same way as for intermediate
stiffeners.
An end stiffener can be a circular girder composed
of a portion of a flat bottom fora web, a portion of
the shell for one flange, and a circumferential
member welded to the bottom for the other flange.
The proportions of such a girder should be limited by
the AISC rules for compression ·members.
The required .cross-sectional area of a composite
end stiffener should be at least
As = phDo
4 Fa
(3-11)
If available, a portion of the shell equal to
0.78 y'Rot on each side of the stiffener can be
16
Part IV
Membrane
Theory~~~~~~~~~~
ost vessels storing liquid or gas are surfaces
of revolution, formed by rotation of one or
more continuous pl~me curves about a
straight line in their plane. The line is called the axis
of revolution. All sections of a shell of revolution
perpendicular to the axis of revolution are circles.
Usually the axis of revolution of a storage vessel is
vertical, in which case all horizontal sections are
circles.
Note:
Radii R, and R2 lie in the same line, but have
different lengths except for a sphere where R1 == R2.
T1 and T2 are loads per inch and will give the
membrane stress in the plate when divided by the
thickness of the plate.
M
General Equation for Membrane Forces
Consider an element of a spherical section of unit
length in each direction.
Figure 4-1 indicates the radii and forces T1 and T2
acting on the element.
Figures 4-2 and 4-3 indicate the pressure on the
element and the components of the membrane unit
forces in the latitudinal and meridional planes.
For equilibrium, the summation of forces must be
equal to zero.
Notation
P
= The
internal pressure on shell. It may be due
to gas alone (PG) , liquid alone (Pd, or both
together (PG + Pd (psi).
T, = The meridional force (sometimes called
longitudinal force). This is force in vertical planes,
but on horizontal sections (pounds per inch).
T, is positive when in tension.
T2 = The latitudinal force (sometimes called hoop or
ring force). This is Jorce in horizontal planes,
but on vertical section (pounds per inch).
T2 is positive when in tension.
R = Horizontal radius at plane ·under consideration
from axis of revolution (in).
R1 = Radius of curvature in vertical (meridional)
plane at level under consideration (in).
Generally R, is negative if it is on the
opposite side of the shell from R2.
R2 = Length of the normal to the shell at the plane
under consideration, measured from the shell
to its axis of revolution (in).
Generally R2 is positive unless the plane
results in more than one circle.
W = Total weight of that portion of the vessel and its
content, either above or below the plane under
consideration, which is treated as a free body
in computations for such plane (pounds). W has
the same sign as P when acting in the same
direction as the pressure on the plane of the
free body, and the opposite sign from P when
acting in the opposite direction.
AT == Cross sectional area of the interior of the vessel
at the plane under consideration (square
inches).
y = Density of product (pounds per cubic inch).
l: Outward Force = P.R2 <l>2.R1 cJ>1
l: Inward Force
2T1 <l>1R2<1>2 + 2T2 <I>2R,cJ>,
=
"2
"2
Equating the two:
P.R2 <l>2.R1<1>1 =
2T1 <I>,R2<1>2 + 2T2 <l>2R1<1>,
"2
2"
:. PR1R2 = T,R2 + T2R,
:. p = 11 + 12
(4-1)
R1
R2
Equation 4-1 is the general equation for membrane
forces. This equation considers membrane forces
primarily produced by the product contained within
the vessel. The weight of the vessel itself may add to
these forces and should be considered in the
analysis.
Modified Equations for Membrane Forces
In general, the meridional force is the unit force in
the wall of the vessel required to support the weight
of the product, internal pressure, and plate weights
at the plane under consideration.
In the free body diagram (figure 4-5), consider the
forces acting at plane 1-1.
The total forces acting at plane 1-1 from above the
plane = p.rr.R2.
17
General Equation for Membrane Forces
PLANE B·B
(VERTICAL)
PLANE A·A
(NORMAL TO SURFACE)
FIGURE 4·1
Elevation View, Plane B-B
Plan View, Plane A-A
FIGURE 4-3
FIGURE 4-2
18
Modified Equations for Membrane Forces
I
1-'-----'1
FIGURE 4-4
1--~
R = R2 SIN<I>
FIGURE 4-5
19
For figures 4-6, 4-7,4-8,4-9, and 4-14, the equations
for membrane forces are:
Total forces acting at plane 1-1 from below the
plane = W.
Total vertical downward force = P.TI.R2 + W
Vertical force required along circumference at
plane 1-1 to support the downward forces:
T1 =
_ P.TIR2+ W
T
T. =
2TIR
VI -
_ JJLL _
P.TIR2+ W
T1
T, - Sin cI> - 2TIR Sin cI>
T,
PR
= 2 Sin cI>
= 2
Since
.W
+ 2TIR Sin cI>
s~n 4> [ p
+
[p -
= R2 and TIR2 = AT
~.
[p
+
~]
T.
= R. [ P
Further Simplifications
(4-2)
-
=~[p+~]
2
AT
The sign of R1, R2, P, W, and AT are shown in table
4-1 and must be included in computing the forces.
For any other vessel configuration, a free body
diagram can be drawn and the forces T, and T2
calculated in a similar way.
The equations for membrane forces can be further
simplified for some of the shapes.
From Equation 4-1
a.Spheres
~~]
For spheres with no product (gas pressure
only), the equations reduce to:
These are the equations used in API 620.
=
T,
Simplified Equations for
Commonly Used Shapes
II
T2 = R2 .[ P _
R,
Since
T1
PR2]
2R,
= R2 = R
= T2 =
PR
2
where R = radius of sphere.
Level of product in the vessel.
b.
Volume of product to be used in calculating
the weight of product above or below the free
body diagram.
Cylinders
If the weight of the plate is neglected and
there is no internal pressure in the vessel and since
R2 = R:
Area of plate to be used in calculating the
weight of plate above or below the free body
diagram.
T,
= 2"R [ PL
-
TIR2YH]
TI R2
Since rH = PL
For all figures:
T1
P = PG + rH
AT
PGR2
2
Figures 4-6 to 4-14 show the common vessel shapes
used and the direction and magnitude of the radii,
pressure, and weights acting on the free body
diagram. Table 4-1 indicates the sign for each
variable . The figures use the following notations:
fE[l
Wj
~~]
T2 = PR2
n~.]
R
Sin cI>
T, =
R.
For figures 4-10,4-11,4-12, and 4-13 where R1 =
co, the equations for membrane forces reduce to:
Membrane force
or
~[P
+~]
2
AT
T2
= TIR2
=0
= PL.R
where R = radius of cylinder.
20
I
[
_ ...1-1----
LINE OF
SUPPORT
T
R=R2 SIN cp
FIGURE 4-6
Spherical Vessel or Segment. Plane below line of support.
R=R2 SIN cp
I
l---L---~T-ri~H"'i+.ri.~~T:-ri~r-l · ·
[
~ :~:.I-I----
LINE OF
. SUPPORT
T
FIGURE 4·7
Spherical Vessel or Segment. Plane above line of support.
21
.. .. . ..., .:.
. ... . -: . .:
.. . '
.
. . .. . . .
,'
'
.
':
., . .
. '
.
LINEOF
J -T
. SUPPORT
R=R2 SIN cp
FIGURE 4·8
Spheroidal Vessel or Segment. Plane below line of support.
R=R2 SIN cp
I
l------L-f't~~~~~r-A~~~~~~~lr-l
-r-·
[LINE OF
SUPPORT
-r
FIGURE 4·9
Spheroidal Vessel or Segment. Plane above line of support.
22
LINE OF
SUPPORT
I
R-R2 CDS
cp
R 1 = .DO
FIGURE 4·10
Conical Vessel or Segment. Plane below line of support.
R=R2 CDS cp
I
1
LINE OF
SUPPORT
I
R 1 = DO
FIGURE 4·11
Conical Vessel or Segment. Plane above line of support.
23
~~
I
v
I
Rl =
00
FIGURE 4·12
Conical Vessel or Segment. Pressure on convex side.
Plane above line of support.
R=R.;:>
PGI
'~
/
/
/:':'~
,')'
:::;",';
::,~
1
\l
':" /
,r.:: ,'')
",,)
<.;WI
:;/:
LINE OF
SUPPORT
'J
X
:',:,
::,:,)"
',,;
:',<,,:'
:',::, ':','
:;,:
'
.. :
~;)}
1::
r,
~">
(\'
.":'>,': ',,' y'
:/'::":::/,:':,:,
::':,
...::
I
1-
''':;
::.',
f
I
R1 = 00
FIGURE 4·13
Cylindrical Vessel. Plane above line of support.
24
\"
.
I
FIGURE 4-14
Curved Segment. Pressure on convex side.
Plane above line of support.
TABLE 4-1
Figure
R1
R2
P
W
AT
4-6
+
+
+
+
+
4-7
+
+
+
-
+
4-8
+
+
+
+
+
4-9
+
+
+
-
+
4-10
co
+
+
+
+
4-11
co
+
+
-
+
4-12
co
+
-
+
+
4-13
co
+
+
-
+
4-14
-
+
+
-
+
25
Part V
Self-Supported Stacks ....................._
Scope
a damping device. Such devices might consist of a
gunite or similar lining or so-called "wind spoilers"
on the exterior of the stack.
'
The subject is quite complex. To attempt a brief
summarization could be dangerously misleading.
Instead, a bibliography of references is appended at
the end of this part for the benefit of those who wish
to explore the subject more thoroughly.
he scope defined for this Volume stated that
stacks would not be discussed in detail
because of the complicated problem of
resonant vibrations. Apart from this phase, however,
there are purely structural facets that may be of
interest. For the benefit of those not familiar with the
problem, a brief explanation of stack vibration
follows:
T
Minimum Thickness and Corrosion
In view of the corrosive nature innate to stack
operation, it is wise to add a corrosion allowance to
the calculated shell thickness. The nature of the flue
gasses and moisture content in the area are some
important parameters in determining the amount of
corrosion for which to allow.
Erection requirements usually dictate minimum
plate thicknesses and the stress formulae in this part
are not considered valid for thicknesses less than
Y4". Therefore, the minimum thickness for shell plate
is taken to be Y4" nominal.
Wind-Induced Vibrations
When a steady wind blows on an unsheltered,
unguyed stack, formation and shedding of air
vortices on each side of the stack can apply
alternating lateral forces that cause movement of the
stack perpendicular to the direction of the wind.
The frequency of vortex shedding is a function of
wind velocity and stack diameter. The term critical
velocity denotes the wind velocity at 'A'hich the
frequency of vortex shedding equals the natural
frequency of the stack. Under such conditions,
resonance occurs.
Excessive lateral dynamic deflection and vibration
of the stack from vortex shedding may occur at wind
velocities considerably below the maximum wind
velocity expected in the area.
One way to avoid resonance and consequent
damage to the stack is to proportion the stack so
that the critical wind velocity exceeds the highest
sustained wind velocity that is likely to occur. In most
areas, for example, it is unlikely that a steady wind
of more than 75 mph will occur. Hence, a stack
having a critical velocity of 75 mph is probably safe
in those regions, though gusts of greater velocity
might occur.
There may be reasons, however, why a stack of
such proportions will not serve the purpose. If so, the
effects of dynamic vibrations must be thoroughly
investigated. If the critical wind velocity is low
enough, it may be that the stresses due to dynamic
deflections are within design limits. In that case, the
stack is structurally adequate if noticeable movement
of the stack is not objectionable.
If investigation shows that stresses due to
vibrations are not within safe limits, the only
solutions are to change the stack diameter or to add
Notation
A
(l
AB
As
~
G
G'c
GL
o
Do
E
E1
Fa
Fb
Fe
Fer
FL
Fs
27
= Cross sectional area of base ring, in.2
= Vertical angle of cone to cyl., degrees
= Anchor bolt circle, in.
= Required area for stack stiffeners, in.2
= Critical damping ratio of .stack
= See Fig. 10 Sec. A-A
= Euler Factor
= Lift coefficient (0.2 for circular cylinder)
= Outside diameter of stack, in.
= OutSide diameter of cylindrical portion of
stack, ft.
= Modulus of elasticity, psi at design temperature
= Joint efficiency for base plate design
= Allowable compressive stress for
circumferential stiffeners, 12000 psi
(unless otherwise noted)
= Allowable bending stress, 0.6 F4, psi for
stiffeners
= Allowable compressive stress, ksi
= Critical buckling stress, ksi
= Equivalent static force, Ibltt of height
= Allowable compressive stress, psi (in conecylinder junction area)
Fy
= Yield
point of stack material, ksi
Factor of safety
Overall height of stack, ft.
Overall height of stack, in.
Required moment of inertia for stack
stiffeners, in.4
K4> = Effective length factor
K = Slenderness reduction factor
Ls = Stiffener spacing, ft.
L = length for KUr
LS1 = Stiffener spacing, in.
M = Moment at any design point, inch-pounds
N = Number of anchor bolts
Pd = Wind load, psi
R 1 = Outside conical radius, in.
Ro = Outside radius of cylinder portion of stack, in.
S = Strouhal number (0.2 for steel stack)
Ss = Required section modulus for stack stiffeners,
in.3
T = Load per bolt, lb.
V = Total direct load at any design point, lb.
Ver1 = Critical wind velocity, mph
VCr2 = Critical wind velocity, ftlsec.
Vo = Resonance velocity, ft/sec.
W = Chord for arc W', in.
W' = Arc length of breeching opening, in.
Ws = Unit weight of stack shell, Ib.lin. 3
do = Outside diameter of belled stack base, ft.
fe = Compression stress, ksi
fo = Frequency of the lowest mode of ovaling
vibration, cps
f t = Natural frequency, cps
9 = Acceleration of gravity, 386 in.lsec.
h = Height of stack bell, ft.
p
= Wind load, psf
qer = Dynamic wind pressure, psf
r
= Radius of gyration, in.
= Thickness of stack, in.
w = Uniform load over breeching opening, Ib.lin.
FS =
H =
H1 =
Is =
Minimum base diameter
do = H/10
(5-1)
Minimum bell height
h = 0.3H
(5-2)
Minimum diameter of
cylinder, Do = H/13
.r
(5-3)
~
---a..-..-o.-"
/---,-.-
I_
do~
Figure 5-1. Cylindrical Stack with Belled Base.
Stacks are likely to be subjected at least to the
following loads:
1. Metal Weight.
2. Lining Weight.
3. Wind: Wind load provisions may be found in
ASCE 7-88. Local building codes should also be
consulted.
4. Icing (if required).
5. Seismic (if required).
6. Thermal cycling (vertical & circumferential).
7. Possible negative pressures.
8. Other requirements of local building codes.
Dynamic Wind Criteria
The dynamic influence of wind may be approximated
by assuming an equivalent static force, FL, in pounds
per foot of height, acting in the direction of
oscillations, given by:
FL = CL Do qer/2~
(5-4)
NOTE: ~ = Critical damping factor which varies from
1% for an unlined steel stack of small
diameter to 5 0/0 for concrete.
The dynamic wind pressure, qcr, in psf, is given by:
*qer = 0.00119 Vel. The critical wind velocity, Ver2 in
fps, for resonant transverse vibration is given by:
Veriftlsec)
=~
S
(5-5)
The natural frequency, ft (cps), of vibration of a stack
of constant diameter and thickness is given by:
ft = 3.52 D [~]\h
(5-6)
4nH12
2Ws
Critical velocity for a steel stack with an S value of
0.2 is given by:
Static Design Criteria
In the suggested static design criteria below, the
proportions indicated are those desirable from a
structural standpoint. Independent calculations are
needed to determine sizes to satisfy draft or capacity
requirements. In general, stacks proportioned as
suggested will probably have a high critical wind
velocity, but a dynamic check should be made to
verify this.
Short stacks (less than 100 ft. high) may be
straight cylinders without a belled base.
Ver1 (mph) = 3.41 Doft
(5-7)
Values of effective diameters and effective height for
stacks of varying diameter and thickness may be
determined by methods found in reference number 19.
*Reference number 14(b)
28
Critical Wind Velocity for Ovaling Vibrations
P
M~
In addition to transverse swaying oscillations, stacks
experience flexural vibration in the cross-sectional
plan as a result of vortex shed~ing .. Thi~ freq~ency
of the lowest mode of ovaling vibration In a circular
shell is:
v
(5-8)
Ro
Resonance occurs when frequency of the lowest
mode of ovaling vibration is twice the vortex
shedding frequency; thus, the critical wind velocity
for ovaling frequency is:
Vo = toDo = (ft/see)
H
v
(5-9)
cos ~
28
Unlined stacks are subject to ovaling vibrations. In
order to prevent this phenomenon, the thickness of
the stack should not be less than DI250 or
intermediate stiffeners are required to raise the
resonant velocity above 60 mph. Care should be
exercised in coastal areas to give special attention to
high winds as outlined in the aforementioned ASCE
7-88.
!
Figure
In many applications of tubular columns, it is
desirable to use a base cone to provide a broader
base for anchorage. At the junction of the cone and
cylinder (Fig. 5-2), it is necessary to provide
reinforcement to resist the maximum vertical force.
The stresses associated with buckling have four
ranges into which they can fall depending on the tlR
ratio. They in turn may be affected by the Euler
effect or slenderness ratio reduction factor. The
stresses calculated in this manner are not to be
increased for wind or earthquake stresses.
FY[0.35 +
Fy [ 0.8 +
0.017
~:]
< tiRo S
~:]
G
Kc'P
= VRo tan a
(5-14)
Under load, the junction reinforcement, or stiffener,
will move elastically inward. This will induce
secondary vertical bending stresses on each side of
the junction. For that reason, it is desirable to keep
allowable stress Fs relatively low. If Fs is inthe,range
of 8,000 psi, the secondary stresses can usually be
ignored if Do is not greater than about 15 ft. For
greater diameters or higher values of Fs it would be
advisable to evaluate the secondary stresses. Note
that V is the maximum value resulting from both
vertical load and bending moment in the cylinder at
the junction level.
The moment of inertia Is of the stiffener section
should not be less than:
0.5 [ C'C]2
=1
(5-13)
Fs
(5-10)
< KUr Kc'P =
If G'e ;::: KUr
= HRo = VRo tan a
The area of reinforcement required is
FS = 2.0
Fe = Kc'PFer/FS
(5-12)
The ring compression to be resisted is
As
=.r/ 2nFer£
(5-11)
nRo2
H = V tan a
Fy/11600
0.01 ~ tiRo S .04
2
+ ~
and the radial thrust
tiRo> .04
If GTe
= -p-
2nR o
Fy/11600 ~ tiRo S 0.01
Fy
G'e
V
tiRo Range
5.8 x 103 tiRo
Loads on Cylinder·Cone Junction
Cylinder-Cone Junction
Stack Stresses
Fer
5~2.
\
KUr
_ 0.5 [ KUr ]2
G'e
Tables 5-1, 5-2 and 5-3 have been developed
using A8TM A36 steel with a yield of 36 ksi. The
value of K is taken as 2 in view of the fact that a
stack is normally a cantilever.
These allowable stresses will also be used for
tapered or belled base stacks using the equivalent
cylindrical radius approach as ~hown bel?w. In o~der
to arrive at allowable stresses In the cOnical section
one would substitute R 1 into the above formulae for
HR o 3
(5-15)
£
based on a factor of safety of 3 for critical buckling.
The area of reinforcement and computation of Is
provided by a stiffener may, include an area of
Ro·
29
and bottom flanges. The shell of the stack will serve
as the web. Each ring girder must be capable of
carrying a uniform distributed load, in terms of
pounds per inch of arch W', of:
cylinder and cone plate equal to
0.78(t vRot +
vR 1t)
t1
where R 1 = Ro
Icos
(5-16)
a
w= ~ + ~
This approach can be used in designing the
junction of two cones having different slopes, except
that H would be the difference between the
horizontal components of the axial loads in the two
cones.
reDo
The bending moment in the girder is:
Mq = WW'2
Allowable bending stresses may be chosen using
AISC rules.
A stiffener is required at the top of the stack, also
intermediate ring stiffeners are required to prevent
deformation of the stack shell under wind pressure
and to provide structural resistance to negative draft.
Spacing of intermediate stiffener Ls is:
v' ~
Base Plates
(5-19)
In addition to bending stresses due to bending loads,
the stack base plate must resist ring tension due to
the horizontal component of the base cone if one is
used. Maximum ring tension should be limited to
10,000 psi to account for secondary bending
stresses in the base cone. This value may be varied
upward depending upon the extent of secondary
stress evaluation. Tension should be checked at the
minimum cross-section occurring at the anchor bolt
holes or at a weld joint where 85 010 or 100 010
efficiency may be assumed.
A base plate area may be calculated by the
following equation:
(5-20)
A = VDotana
20,000£,
(5-17)
To insure a nominal size of intermediate stiffener,
the spacing is limited within 1.5 times the stack
diameter.
Intermediate stiffeners should meet the following
minimum requirements:
Ss = pL S1 D2
(i n3 )
(5-18)
1100Fb
A
s
=
Pd Ls1 D
2Fa
(in2)
(5-23)
12
Circumferential Stiffeners
Ls =60
(5-22)
reDo2
(5-24)
To satisfy the requirements of the above
intermediate stiffener d~Sign formulae a port. ion of
the stack equal to 1.1 t Dot may be included.
Breeching Opening
The breeching opening should be as small as
consistent with operating requirements with a
maximum width of 20013.
The opening must be reinforced vertically to
replace the area of material removed increased by
the ratio of DelC. Therefore, each vertical stiffener on
each side of the opening should have a crosssectional area of:
A = W'tD o
s
2C
(5-21).
Each vertical stiffener in conjunction with a portion
of the liner shell would be designed as a column.
Each stiffener should extend far enough above and
below the opening to develop its strength.
Horizontal reinforcement should be provided by a
ring girder above and below the opening. These
girders should be designed as fixed-end beams to
carry the load across the opening above and below.
The span in bending is the width W between the side
column, but the girders should encircle the stack to
preserve circularity at the opening. To form each ring
girder, stiffener rings should be placed to act as top
A
A
,Fig. 5-4)
(Fig. 5-4)
Figure 5·3. Elevation of Stack.
30
Base plate thickness may be determined by using
AISC formulae and allowable bending stresses.
Anchor Bolts
Minimum diameter = 1112"
Maximum spacing of anchor bolts = 5'-6'
Maximum tension at root of threads = 15,000 psi
Each bolt should be made to resist a total tension in
pounds of:
c
T
= 4M
ND
N
-
V · (#/Bolt)
N
= # of AB
A suggested design procedure for anchor bolt
brackets is covered in Part VII.
Figure 5-4. Horizontal Section Through Opening.
.(Section A-A, Fig. 5-3)
For tiRo from .0017 through Fyl11600
~
KLir
~
0
17.5
35
52.5
70
87.5
105
122.5
140
157.5
175
.0017
.00192
.00214
.00236
.00258
.0028
.00302
4930
4917
4878
4813
4722
4605
4462
4293
4097
3877
3630
5568
5551
5502
5419
5303
5154
4971
4755
4507
4225
3909
6206
6185
6124
6071
5876
5691
5414
5196
4887
4537
4145
6844
6819
6744
6618
6443
6217
5942
5616
5240
4814
4338
7482
7452
7362
7212
7003
6733
6404
6015
5565
5056
4487
8120
8085
7979
7803
7556
7238
6850
6392
5862
5263
4593
8758
8717
8594
8389
8101
7732
7281
6747
6132
5434
4655
.
Table 5-1
Fe Allowable Compressive Stress (Fy = 36 ksi)
31
(5-25)
For tiRo from Fy/11600 to .01
~
a
.003104
.00425
.0054
.00655
.0077
.00885
.00999
9094
9049
8917
8695
8386
7988
7501
6926
6262
10128
10073
9908
9634
9250
8756
8152
7439
6616
11162
11095
10895
10562
10095
9496
8762
7896
6896
12196
12116
11888
11480
10928
10207
9331
8297
13230
13136
12855
12387
11732
10889
9859
8642
14264
14155
13829
13284
12523
11543
10345
8930
15298
15173
14797
14171
13295
12168
10791
9163
Z~.Q$.
Zg~a
Z~Q~.
~R~$.
~ZR~
5769
4673
Zg$.?
~t?~.~
5769
4673
5769
4673
5769
4673
KUr l
17.5
35
52.5
70
87.5
105
122.5
140
157.5
175
4670
4673
4673
Table 5·2
Fe Allowable Compressive Stress (Fy = 36 ksi)
For tiRo from .01 to ·.04
~
0
.01
.015
.02
.025
.03
.035
.04
15300
15175
14798
14173
13296
12169
10792
15750
15617
15219
14556
13627
12432
10972
16200
16060
15638
14936
13954
12690
11146
16650
16502
16057
15315
14277
12942
11311
17100
16944
16474
15692
14597
13189
11468
17550
17385
16891
16067
14914
13431
11618
18000
17827
17307
16440
15227
13666
11760
~~.R~
~g~?
~~gQ
~~~$.
~~7.~
~RQ~
7302
5769
4673
7302
5769
4673
~~~~
7302
5769
4673
7302
5769
4673
7302
5769
4673
7302
5769
4673
7302
5769
4673
KUr l
17.5
35
52.5
70
87.5
105
122.5
140
157.5
175
If tiRo> .04
Fe
= .5
X
Fy
X
KcI>
Table 5·3
Fe Allowable Compressive Stress (Fy = 36 ksi)
Dotted lines are an indicator at which point G'c> KUr
32
References
13. G.B. Woodruff and J. Kozok, "Wind Forces on
Structures: Fundamental Considerations,"
Proceedings of ASCE, Vol. 84, ST 4, Paper No.
1709,1958, p. 13.
14. -F.B. Farquaharson, "Wind Forces Structures:
Structures Subject Oscillations," Proceedings of
ASCE, Vol. 84, ST 4, Paper 1712, 1958, p.13.
15. ASCE Transaction Paper #3269 {"Wind Forces
on Structure"}.
16. C.F. Cowdrey and J.A. Lewes, "Drag
Measurements at High Reynolds Numbers of a
Circular Cylinder Fitted with Three Helical
Strakes," NPLlAero/384, July 1959.
17. L. Woodgate and J. Maybrey, "Further
Experiments on the Use of Helical Strakes for
Avoiding Wind-Excited Oscillations of Structures
with Circular or Near Circular Cross-Section"
NPLlAero/381, July 1959.
'
18. A. Roshko, "On the Wake and Drag Bluff
Bodies," presented at Aerodynamics Sessions,
Twenty-Second Annual Meeting, lAS, New York,
N.Y., January, 1954.
19. J.~. Smith and J.H. McCarthy, "Wind Versus
Tall Stacks," Mechanical Engineering, Vol. 87,
. January, 1965, pp. 38-41.
20. Gaylord and Gaylord, "Structural Engineering
Handbook." 2nd Edition, Chapter 26.
21. R. Stuart III, A.R. Fugini, A. DeVaul, PittsburghDes Moines Corp. Research Report #98528,
"Design of Allowable Compressive Stress
Cylindrical or Conical Plates, AWWA D100,"
May, 1981.
22. Roger L. Brockenbrough, Pittsburgh-Des Moines
Corp. Research Report 98030, "Determination of
The Critical Buckling Stress of Cylindrical Plates
Having Low t/R Values." October 5, 1960.
23. Tom Buckwalter, Pittsburgh-Des Moines ··Qorp.
Supplement to RP 98030, "Determination of the
Critical Buckling Stress in a Cylinder Having a
tlR of 0.00426," December 20, 1960.
24. AISC 1989 "Specification for Structural Steel
Buildings - Allowable Stress Design and Plastic
Design."
1. M.S. Ozker and J.O. Smith, "Factors Influencing
the Dynamic Behavior of Tall Stacks Under the
Action of Winds," Trans. ASME Vol. 78, 1956,
pp. 1381-1391.
2. P. Price, "Suppression of the Fluid-Induced
Vibration of Circular Cylinders," Proceedings of
ASCE, Vol. 82, EM3, Paper No. 1030, 1956, p.
22.
3. W.L. Dickey and G.B. Woodruff, "The Vibration
of Steel Stacks," Proceedings of ASCE, Vol. 80,
1954, p. 20.
4. T. Sarpkaya and C.J. Garison, "Vortex Formation
and Resistance in Unsteady Flow," Journal of
Applied Mechanics, Vol. 30, Trans. ASME, Vol.
85, Series E, 1963, pp. 16-24.
5. A.W. Marris, "A Review on Vortex Streets,
Periodic Wakes, and Induced Vibration
Phenomena," Journal of Basic Engineering,
Trans. ASME, Series D, Vol. 86, 1964, pp.
185-196.
6. J. Penzien, "Wind Induced Vibration of
Cylindrical Structures," Proceedings of ASCE,
Vol. 83, EM 1 Paper No. 1141, January, 1957, p.
17.
7. W. Weaver, "Wind-Induced Vibrations in Antenna
Members," Transactions of ASCE, Vol. 127, Part
1, 1962, pp. 679-704.
8. C. Scruton and D. Walshe, "A Means of
Avoiding Wind-Excited Oscillations of Structures
with Circular or Nearly Circular Cross-Section,"
NPLlAero/335, October 1957.
9. C. Scruton, D. Walshe and L.Woodgate, "The
Aerodynamic Investigation for the East Chimney
Stack of the Rugeley Generating Station,"
NPLlAero/352.
10. A. Roshko, "On the Development of Turbulent
Wakes from Vortex Streets," NACA Report 1191,
1954.
11. A. Roshko, "On The Drag and Shedding
Frequency of Two-Dimensional Bluff Bodies,"
NACA Technical Note 3169, July 1954.
12. N. Delany and N. Sorensen, "Low-Speed Drag of
Cylinders of Various Shapes," NCA Technical
Note 3038, November, 1953.
33
Part VI
Supports for Horizontal
Tanks and Pipe Lines ----------------different distribution of stress in the pipe or vessel
wall from that encountered with a full ring support,
are discussed in the following paper by L. P. Zick. It
includes some revisions of and additions to the
original paper published in "The Welding Journal
Research Supplement", September, 1951, and
reprinted in "Pressure Vessel and Piping Design Collected Papers 1927-1959", published by ASME in
1960.
T
here is considerable information available on
design of supports for horizontal cylindrical
shells where a complete ring girder is used.
There are many installations where a horizontal
tank, pressure vessel, or pipe line is supported by a
saddle extending less than 180 0 around the lower
. part of the cylinder. The effects of vertical deflection
of the cylinder and the concentration of stress
around ·the horn of the saddle, which result in a
Original paper published in September 1951 liTHE WELDING JOURNAL RESEARCH SUPPLEMENT." This paper
contains revisions and additions to the original paper based upon questions raised as to intent and coverage.
Stresses in Large Horizontal Cylindrical
Pressure Vessels on Two Saddle Supports
Approximate stresses that exist in cylindrical vessels supported on two saddles at various conditions
and design of stiffening for vessels which require it
by L.P. Zick
INTRODUCTION
which vessels may be designed for internal pressure
alone, and to .design structurally adequate and
economical stiffening for the vessels which require it.
Formulas are developed to cover various conditions,
and a chart is given which covers support designs
for pressure vessels made of mild steel for S.torage
of liquid weighing 42 lb. per cu. ft.
The design of horizontal cylindrical vessels with
dished heads to resist internal pressure is covered
by existing codes. However, the method of support is
left pretty much up to the designer. In general the
cylindrical shell is made a uniform thickness which is
determined by the maximum circumferential stress
due to the internal pressure. Since the longitudinal
stress is only one-half of this circumferential stress,
these vessels have available a beam strength which
makes the two-saddle support system ideal for a
wide range of proportions. However, certain
limitations are necessary to make designs consistent
with the intent of the code.
The purpose of this paper is to indicate the
approximate stresses that exist in cylindrical vessels
supported on two saddles at various locations.
Knowing these stresses, it is possible to determine
HISTORY
In a paper1 published in 1933 Herman Schorer
pOinted out that a length of cylindrical shell
supported by tangential end shears varying
proportionately to the sine of the central angle
measured from the top of the vessel can support its
own metal weight and the full contained liquid weight
without circumferential bending moments in the shell.
To complete this analysis, rings around the entire
circumference are required at the supporting points
to transfer these shears to the foundation without
distorting the cylindrical shell. Discussions of
Schorer's paper by H.C. Boardman and others gave
L.P. Zick is a former Chief Engineer for the Chicago Bridge & Iron
Co., Oak Brook, III.
35
Figure 6-1. Strain gage test set up on 30,000 gal. propane tank.
approximate solutions for the half full condition.
When a ring of uniform cross section is supported on
two vertical posts, the full condition governs the
design of the ring if the central angle between the
post intersections with the ring is less than 126 0,
and the half-full condition governs if this angle is
more than 126°. However,the full condition governs
the design of rings supported directly in or adjacent
to saddles.
Mr. Boardman's discussion also pointed out that
the heads may substitute for the rings provided the
supports are near the heads. His unpublished paper
has been used successfully since 1941 for vessels
supported on saddles near the heads. His method of
analysis covering supports near the, heads is
included in this paper in a slightly modified form.
Discussions of Mr. Scharer's paper also gave
Table 6-1 Saddle
angle,
e
Maximum
lonf}' bending
stress,
Mkl. K1 "
= 0.09)
= 0.11)
Values of Coefficients in Formulas for Various Support Conditions
Tangent.
shear,
Circumf.
stress top
of saddle,
K2
K3t
Additional
head
stress,
Ring
compres.
in shell,
K4
Ks
Rinfl. stiffeners
Circumf.
Direct
bending,
stress,
K6
K7
Tension
across·
saddle,
K8
Shell unstiffened
1.171
0.799
0.0528
0.0316
0.880
0.485
0.0132
0.0079
120 0
150 0
0.63 (AIL
0.55 (AIL
120 0
150 0
1.0 (AIL
1.0 (AIL
120 0
150 0
0.23 (AIL = 0.193)
0.23 (AIL = 0.193)
0.319
0.319
120 0
150 0
0.23 (AIL = 0.193)
0.23 (AIL = 0.193)
1.171
0.799
= 0)
= 0)
successful and semi-successful examples of
unstiffened cylindrical shells supported on saddles,
but an analysis is lacking. The semi-successful
examples indicated that the shells had actually
slumped down over the horns of the saddles while
being filled with liquid, but had rounded up again
when internal pressure was applied.
Testing done by others 2 ,3 gave very useful results
in the ranges of their respective tests, but the
investigators concluded that analysis was highly
indeterminate. In recent years the author has
participated in strain gage surveys of several large
vessels. 4 A typical test setup is shown in Fig. 6-1.
In this paper an attempt has been made to
produce an approximate analysis involving certain
empirical assumptions which make the theoretical
analysis closely approximate the test results.
0.760
0.673
0.204
0.260
Shell stiffened by head, A $ RI2
0.401
0.297
0.760
0.673
0.204
0.260
Shell stiffened by ring in plane of saddle
0.0528
0.0316
0.340
0.303
0.204
0.260
0.0577
0.0353
0.263
0.228
0.204
0.260
Shell stiffened by rings adjacent to saddle
0.0132
0.0079
0.760
0.673
·See Fig. 6·5, which plots K, against AIL, for values of K, corresponding to values of AIL not listed in table.
tSe€, Fig. 6·7.
36
~
I"-.
\
""-
\
'"
"-
'
"
'"
" "'"
""
"-
~
.............
~,
............
~
e:
\
~ "'-.s'
6' "'"
~ t'-...
L
A
l~ .2
~
~
~ :!
L
'J
I
'\
'"""
I
1)4
lYe
'ta 3/4
SHELL THICKNESS. t. IN INCHES
IZO
\
"z~
l:re
~
o~
"-
/
I¥'
k-
"-,
~
~
@
120';
I II
1/ /
/
/
//
fa: 7
1.09 =~
/
/
L
/
h.DD
I Rlt-GS
150·
//
L
\.
\
~
-:l
• . I~
..,
/
V.17
~
~
T~~
PL
_'T~r~ foil'.-:-~
~
-
./
~
~(2 ..
A _
Lt.:
f'-
-.
""':::
6"
~
1-
,
~
80
~
90
40
50
,,,,,-
'" """" '"
...
60
7o
,~
~:~
~" ~~~
"'-,
~I~
"\ ~.s I'Z'
.'" '\~
~ 110
12-'
~ 1.~:
"\
I...,
.25
30
~ ,"'~ " "'-
~ ~O
W
to)
·r
20
~ ~, .........
4'"
:r:
AT
P~TS
./'
"'ADO Rlt-GS AT SU PPORT ~
~ 30 ~ .........
~
/
/e-I~~
"LRf A~ 16... ~
ADD ~INCS AT
...
......
SUPPORT
/
\
V
NOT
~r ~ .2.4 /
/ VA"! .. fr;~ ~
BE
V
/,. ~6~ ~~.5 ify
PPORT ED CJ-I
~
TWO SADO "-ES
/
/
"CtJE ....K ~AO/
\
~ ~~
~a
BASIS OF' DESIGN
A-265 CRADE C CARBON STEEL
LIQUIO WT. - . 42 LBS PtR. CU. F'T
EX AMPLE SHOWN BY ARROWS
R - 5'} USE 120" SADOLES
L- 80'
A = R/2 OR LESS
t • 3/;'
CHECK HEAD PL THK
Ve:
/e =
II o~ .Izi
IZO·
\~
........
IV:2
I
~
80
<
"~
"'" ""'~
''""'"'" '" '"
9o
I00
II
o
12 o
~13
,.
Figure 6-2. Location and type of support for horizontal pressure vessels on two supports.
SELECTION OF SUPPORTS
should be increased for extremely heavy vessels,
and in certain cases it may be desirable to reduce
this width for small vessels.
Thin-wall vessels of large diameter are best
supported near the heads provided they can support
their own weight and contents between supports and
provided the heads are stiff enough to transfer the
load to the saddles. Thick-wall vessels too long to
act as simple beams are best supported where the .
maximum longitudinal bending stress in the shell at
the saddles is nearly equal to the maximum
longitudinal bending stress at mid-span, provided the
shell is stiff enough to resist this bending and to
transfer the load to the saddles. Where the stiffness
required is not available in the shell alone, ring
stiffeners must be added at or near the saddles.
Vessels must also be rigid enough to support normal
external loads such as wind.
Figure 6-2 indicates the most economical locations
and types of supports for large steel horizontal
pressure vessels on two supports. A liquid weight of
42 lb. per cu. ft. was used because it is
representative of the volatile liquids usually
associated with pressure vessels.
When a cylindrical vessel acts as its own carrying
beam across two symmetrically' placed saddle
supports, one-half of the total load will be carried by
each support. This would be true even if one support
should settle more than the other. This would also
be true if a differential in temperature or if the axial
restraint of the supports should cause the vessel
acting as a beam to bow up or down at the center.
This fact alone gives the two-support system
preference over a multiple-supporting system.
The most economical location and type of support generally depend upon the strength of the vessel to
be supported and the cost of the supports, or of the
supports and additional stiffening if required. In a few
cases the advantage of placing fittings and piping in
the bottom of the vessel beyond the saddle will
govern the location of the saddle.
The pressure-vessel codes limit the contact angle
of each saddle to a minimum of 120 0 except for very
small vessels. In certain cases a larger contact angle
should be used. Generally the saddle width is not a
controlling factor; so a nominal width of 12 in. for
steel or 15 in. for concrete may be used. This width
37
t ;t
(a) UNSTIFFENED SHELL
~
3H
T
r",
I
\
I
\
I
Q Qd
A(~)
I
... /
,
I
i
(b) SHELL STIFFENED BY RINGS
ADJACENT TO SADDLE B
4
:
;'
~
,~ (~ +:.»
(1-+1)
SECT A·A
!
B4
I. (QL)(~-<4~
1.~1
_ 1.<4H L
A-
-
i
(I ~
l Cl.) LO .... OS ~ AtACTIO. NS
ASSUMED
TANGENTIAL
SHEAR STRESS
RING
!
(e) SHELL STIFFENED BY RING IN
Q (~)
PLANE OF SADDLE
~l+T
X
(d) SHEAR DIAGRAM SADDLE
AWAY FROM HEAD
(b)
MOMEWT OIAGA.......
IN
'T.- Las
(e) SHELL STIFFENED BY HEAD
10
Figure 6·3. Cylindrical shell acting as beam over supports.
Where liquids of different weights are to be stored
or where different materials are to be used, a rough
design may be obtained from the chart and this
design should be checked by the applicable formulas
outlined in the following sections. Table 6-1 outlines
the coefficients to be used with the applicable
formulas for various support types and locations. The
notation used is listed at the end of the paper under
the heading Nomenclature.
MAX_ OSlNa (
~-;;-;-
a-SlNu
. -.
cos. )
cos.
+ SiNo
SECTC·C
Figure 6·4. Load transfer to saddle by tangential
shear stresses in cylindrical shell.
just as though the shell were split along a horizontal
line at a level above the saddle. [See Fig. 6-4 (a)]. If
this effective arc is represented by 2A (A in radians)
it can be shown that the section modulus becomes:
MAXIMUM LONGITUDINAL STRESS
The cylindrical shell acts as a beam over the two
supports to resist by bending the uniform load of the
vessel and its contents. The equivalent length of the
vessel (see Figs. 6-2 and 6-3) equals L + 4H13,
closely, and the total weight of the vessel and its
contents equals 20. However, it can be shown that
the liquid weight in a hemispherical head adds only
a shear load at its junction with the cylinder. This
can be approximated for heads where H ~ R by
representing the pressure on the head and the
longitudinal stress as a clockwise couple on the head
shown at the left of Fig. 6-3. Therefore the vessel
may be taken as a beam loaded as shown in Fig.
6-3; the moment diagram determined by statics is
also shown. Maximum moments occur at the
midspan and over the supports.
Tests have shown that except near the saddles a
cylindrical shell just full of liquid has practically no
circumferential bending moments and therefore
behaves as a beam with a section modulus
lie = 1tr2t.
However, in the region above each saddle
circumferential bending moments are introduced
allowing the unstiffened upper portion of the shell to
deflect, thus making it ineffective as a beam. This
reduces the effective cross section acting as a beam
lie
= 1tr2t
A + sin A cos A - 2 Sin: A )
u
It (
Si~ ~
- cos
~)
Strain gage studies indicate that this effective arc is
approximately equal to the contact angle plus onesixth of the unstiffened shell as indicated in Section
A-A of Fig. 6-4. Of course, if the shell is stiffened by
a head or complete ring stiffener near the saddle the
effective arc, 2A, equals the entire cross section"
and lie = 1tr2t.
Since most vessels are of uniform shell thickness,
the design formula involves only the maximum value
of the longitudinal. bending stress. Dividing the
maximum moment by the section modulus gives the
maximum axial stress in lb. per sq. in. in the shell
due to bending as a beam, or
S1
=
± 3K1QL
1tr2t
K1 is a constant for a given set of conditions, but
actually varies with the ratios AIL and HIL ~ RIL for
different saddle angles. For convenience, K1 is
plotted in Fig. 6-5 against AIL for various types of
saddle supports, assuming conservative vafues of
38
1.6
/
1.4
~/
?
lv~
«<t.
1.2
-........
~
~«;
K, .8
"'{<
-Y
~«;
..... ~
.6
".:>
~vv
of?
'-....
by (0/2 + ~/20) or (1t - a) as shown in Section A-A
of Fig. 6-4. The summation of the vertical
components of these assumed shears must equal
the maximum total shear.
The maximum tangential shear stress will occur on
the center side of the saddle provided the saddle is
beyond the influence of the head but not past the
quarter point of the vessel. Then with saddles away
from the heads the maximum shear stress in lb. per
sq. in. is given by
/
0
~~
,;::.f?
-::i
1.0
v
"re
4'
~ ~~17
~
i'--.!!'lyG
~'f:f:€
.4
~~
o
S
2
= K2Q (L rt
L
+
2A )
4H
3
o
.02
.04
.06
.08
.10
-.12 '
.14
.16
.18
.20
.22
.24
Values of K2 listed in Table 6-1 for various types of
supports are obtained from the expressions given for
the maximum shears in Fig. 6-4, and the appendix.
Figure 6-4 (f) indicates the total shear diagram for
vessels supported on saddles near the heads. In this
case the head stiffens the shell in the region of the
saddle. This causes most of the tangential shearing
stress to be carried across the saddle to the head,
and then the load is transferred back to the head
side of the saddle by tangential shearing stresses
applied to an arc slightly larger than the contact
angle of the saddle. Section C-C of Fig. 6-4 indicates
this shear distribution; that is, the shears vary as the
sin 4> and act downward above angle a and act
upward below angle a. The summation of the
downward vertical components must balance the
summation of the upward vertical components. Then
with saddles at the heads the maximum shear stress
in lb. per sq. in. is given by
8 2 = K2 Q
RATIO A
T
Figure 6-5. Plot of longitudinal bending-moment
constant, K1 •
H = 0 when the mid-span governs and H = R when
the shell section at the saddle governs. A maximum
value of RIL = 0.09 was assumed because other
factors govern the design for larger values of this
ratio. As in a beam the mid-span governs for the
smaller values of AIL and the shell section at the
saddle governs for the larger values of AIL; however,
the point where the bending stress in the shell is
equal at mid-span and at the saddle varies with the
saddle angle because of the reduced effective cross
section. Fig. 6-SA in App. 8 gives acceptable values
of K1 •
This maximum bending stress, S1' may be either
tension or compression. The tension stress when
combined with the axial stress due to internal
pressure should not exceed the allowable tension
stress of the material times the efficiency of the girth
joints. The compression stress should not exceed
one half of the compression yield point of the
material or the value given by
S1
~(
E..)
29
rt
in the shell, or
in the head.
Values of K2 given in Table 6-1 for different size
saddles at the heads are obtained from the
expression given for the maxim.um shear .stress in
Section C-C of Fig. 6·4 and the appendix.
The tangential shear stress should not exceed 0.8
of the allowable tension stress.
(tlr) [2 - (2/3) (100) (tlr)]
.
which is based upon the accepted formula for
buckling of short steel cylindrical columns. * The
compression stress is not a factor in a steel vessel
where tlr~ 0.005 and the vessel is designed to be
fully stressed under internal pressure.
CIRCUMFERENTIAL STRESS AT
HORN OF SADDLE
·See also par UG·23 (b) ASME Code Section VIII Div. I.
TANGENTIAL SHEAR STRESS
In the plane of the saddle the load must be
transferred from the cylindrical shell to the saddle.
As was pointed out in the previous section the
tangential shears adjust their distribution in order to
make this transfer with a minimum amount of
circumferential bending and distortion. The
evaluation of these shears was quite empirical
except for the case of the ring stiffener in the plane
of the saddle. Evaluation of the circumferential
bending stresses is even more difficult.
Starting with a ring in the plane of the saddle, the
shear distribution is known. The bending moment at
any point above the saddle may be computed by any
Figure 6-4 (d) shows the total shear diagram for
vessels supported in saddles away from the heads.
Where the shell is held round, the tangential
shearing stresses vary directly with the sine of the
central angle 4>, as shown in Section 8-8 of Fig. 6-4,
and the maximum occurs at the equator.
However, if the shell is free to deform above the
saddle, the tangential shearing stresses act on a
reduced effective cross section and the maximum
occurs at the horn of the saddle. This is
approximated by assuming the shears continue to
vary as the sin 4> but only act on twice the arc given
39
• • IZO
----------~,~___
- - - Ut
I
, O~
..
..
0'
.0 I
o
/
..
'
ISO·
SH[L~
v.. sr Irr(~o
~tL~
UII"
'H"
(D
//
120·
V/
11O·
o
..5
" ...TIO
~
,,-
Figure 6·7. Plot of circumferential bendingmoment constant, K3 •
Figure 6-6 Circumferential bending-moment
diagram, ring in plane of saddle.
near the horn of the saddle. Because of the relatively
short stiff members this transfer reduces the
circumferential bending moment still more.
To introduce the effect of the head the maximum
moment is taken as
of the methods of indeterminate structures. If the
ring is assumed uniform in cross section and fixed at
the horns of the saddles, the moment, M\f)' in in.-Ib.
at ,any point A is given by:
~~
cos <1> + ' cI> sin cI> 2
2
M\f) = Or {
1t
f3
Mp = K3Qr
where K3 equals K6 when AIR is greater than 1.
Values of K3 are plotted in Fig. 6-7 using the
+
assumption that this moment is divided by four when
AIR is Jess than 0.5.
cos P _ 1 (cos cI> - ~) x
2413
9[
The change in shear distribution also reduces the
direct load at the horns of the saddle; this is
assumed to be 0/4 for shells without added
stiffeners. However, since this load exists, the
effective width of the shell which resists this direct
load is limited to that portion which is stiffened by
the contact of the saddle. It is assumed that St each
side of the saddle acts with the portion directly over
the saddle. See Appendix B.
Internal pressure stresses do not add directly to
the local bending stresses, because the shell rounds
up under pressure. Therefore the maximum
circumferential combined stress in the shell is
compressive, occurs at the horn of the saddle, and is
due to local bending and direct stress. This
maximum combined stress in lb. per sq. in. is given by
4-6(T)'+2COS2B]}
Si~ Pcos f3
+ 1 - 2(
Si~ PY
This is shown schematically in Fig. 6-6. Note that 13
must be in radians in the formula.
The maximum moment occurs when <l> = 13.
Substituting f3 for <1> and K6 for the expression in the
brackets divided by 1t, the maximum circumferential
bending moment in in.-Ib. is
Mp
= K6 0r
When the shell is supported on a saddle and there
is no ring stiffener the shears tend to bunch up near
the horn of the saddle, so that the actual maximum
circumferential bending moment in the shell is
considerably less than Mp, as calculated above for a
ring stiffener in the plane of the saddle. The exact
analysis is not known; however, stresses calculated
on the assumption that a wide width of shell is
effective in resisting the hypothetical moment, M p,
agree conservatively with the results of strain gage
surveys. It was found that this effective width of shell
should be equal to 4 times the shell radius or equal
to one-half the length of the vessel, whichever is
smaller. It should be kept in mind that use of this
seemingly excessive width of shell is an artifice
whereby the hypothetical moment Mp is made to
render calculated stresses in reasonable accord with
actual stresses.
When the saddles are near the heads, the shears
carry to the head and are then transferred back to
the saddle. Again the shears tend to concentrate
S3
=-
4t(b
0
- 3K30, if L>- 8R
+ 1Ot)
2t2
or
S3
=4t(b
0
- 12KaQR, if L * < 8R
+ 1Ot)
Lt2
• Note: For multiple supports:
L = Twice the length of portion of shell carried by saddle.
If L ~ 8R use 1st formula.
It seems reasonable to allow this combined stress to
be equal to 1.50 times the tension allowable provided
the compressive strength of the material equals the
tensile strength. In the first place when the region at
the horn of the saddle yields, it acts as a hinge, and
the upper portion of the shell continues to resist the
loads as a twa-hinged arch. There would be little
distortion until a second paint near the equator
started to yield. Secondly; if rings are added
40
to reduce this local stress, a local longitudinal
bending stress occurs at the edge of the ring under
pressure. 5 This local stress would be 1.8 times the
design ring stress if the rings were infinitely rigid.
Weld seams in the shell should not be located near
the horn of the saddle where the maximum moment
occurs.
EXTERNAL LOADS
Long vessels with very small tlr values are
susceptible to distortion from unsymmetrical external
loads such as wind. It is assumed that vacuum relief
valves will be provided where required; so it is not
necessary to design against a full vacuum. However,
experience indicates that vessels designed to
withstand 1 lb. per sq. in. external pressure can
successfully resist external loads encountered in
normal service.
Assume the external pressure is 1 lb. per sq. in. in
the formulas used to determine the sloping portion of
the external pressure chart in the current A.S.M.E.
Unfired Pressure Vessel Code. Then when the vessel
is unstiffened between the heads, the maximum
length in feet between stiffeners (the heads) is given
approximately by
L +
213H
r(n-- a: .. lIINa:cosa::1
_
' - -_ _~
r
r
When the head stiffness is utilized by placing the
saddle close to the heads, the tangential shear
stresses cause an additional stress in the head
which is additive to the pressure stress. Referring to
Section G-G of Fig. 6-4, it can be seen that the
tangential shearing stresses have horizontal
components which would cause varying horizontal
tension stresses across the entire height of the head
if the head were a flat disk. The real action in a
dished head would be a combination of ring action
and direct stress; however, for simplicity the action
on a flat disk is considered reasonable for design
purposes.
Assume that the summation of the horizontal
components of the tangential shears is resisted by
the vertical cross section of the flat head at the
center line, and assume that the maximum stress is
1.5 times the average stress. Then the maximum
additional stress in the head in lb. per sq. in. is
given by
= 30 (
8rth
1t -
)
SIN~COs.d
Figure 6-8 indicates the saddle reactions, assuming
the surfaces of the shell and saddle are in
frictionless contact without attachment. The sum of
the assumed tangential shears on both edges of the
saddle at any point A is also shown in Fig. 6-8.
These forces acting on the shell band directly over
the saddle cause ring compression in the shell band.
Since the saddle reactions are radial, they pass
through the center O. Taking moments about point 0
indicates that the ring compression at any pOint A is
given by the summation of the tangential shears
between a and <1>.
This ring compression is maximum at the bottom,
where <I> = 1t. Again, a width of shell equal to 5t
each side of the saddle plus the width of the saddle
is assumed to resist this force. See Appendix B.
Then the stress in lb. per sq. in. due to ring
compression is given by
ADDITIONAL STRESS IN HEAD
USED AS STIFFENER
S4
Ii" C.O$$
RING COMPRESSION IN
SHELL OVER SADDLE
= E Yif( i)2
52.2
£(
,.. 00.".
This stress should be combined with the stress in
the head due to internal pressure. However, it is
recommended that this combined stress be allowed
to be 25 0/0 greater than the allowable tension stress
because of the nature of the stress and because of
the method of analysis.
When ring stiffeners are added to the vessel at the
supports, the maximum length in feet between
stiffeners is given by
L - 2A
=
Figure 6-8. Loads and reactions on saddles.
Yif( i)2
52.2
= E
MAl(
S5
=
0
(
t(b+ 10t)
1t -
1 + cos a
)
a + sin a cos a
or
S5
=
K5 0
t(b + 10t)
The ring compression stress should not exceed
one-half of the compression yield pOint of the material.
WEAR PLATES
The stress may be reduced by attaching a wear
plate somewhat larger than the surface of the saddle
to the shell directly over the saddle. The thickness t
used in the formulas for the assumed cylindrical shell
thickness may be taken as (t1 + t2) for S5 (where t1 :
shell thickness and t2 = wear plate thickness),
provided the width of the added plate equals at least
(b + 10t1) (see Appendix B).
sin2 a
)
a + sin a cos a
or
41
The thickness t may be taken as (t1 + t2) in the
formula for 52, provided the plate extends rl10
inches above the horn of the saddle near the head,
and provided the plate extends between the saddle
and an adjacent stiffener ring. (Also check for 52
stress in the shell at the equator.)
The thickness t may be taken as (t1 + t2) in the
first term of the formula for 53, provided the plate
extends rl10 inches above the horn of the saddle
near the head. However, (t12 + t22) should be
substituted for t2 in the second term. The combined
circumferential stress (53) at the top edge of the
wear plate should also be checked using the shell
plate thickness t1 and the width of the wear plate.
When checking at this point, the value of K3 should
be reduced by extrapolation in Fig. 6·7 assuming e
equal to the central angle of the wear plate but not
more than the saddle angle plus 12°.
..... 1l.
H[ [ "IN.
Mcp = Or { ~ - <I> sin <I> 2nn
sin 13
cos c!> [3/2 + (It -
Mp
n
2(1 - cos
13)
cos
cos
p may be found by statics and is given by
P p
P
-
0 [
nn
p sin p
_ cos
2(1 - cos p)
p] _
cos P
(Mp + Mt)
r(1 - cos p)
or
Pp
p]+
r(1 - cos P}
= K6 Or
n
Knowing the moments Mp and Mf, the direct load at
Knowing the maximum moment MJ3 and the moment
at the top of the vessel, Mf, the direct load at the
point of maximum moment may be found by statics.
Then the direct load at the horn of the saddle is
given in pounds by
-
13) cot III }
For the range of saddle angles considered, M~ is
maximum near the equator where <I> = p. This
moment and the direct stress may be found using a
procedure similar to that used for the stiffener in the
plane of the saddle. Substituting p for <I> and K6 for
the expression in the brackets divided by 21t, the
maximum moment in each ring adjacent to the
saddle is given in in .-Ib. by
n
p
10'
shown in Section A·A. Conservatively, the support
may be assumed to be tangential and concentrated
at the horn of the saddle. This is shown
schematically in Fig. 6·9; the resulting bendingmoment diagram is also indicated. This bending
moment in in.·lb. at any pOint A above the horn of
the saddle is given by
When the saddles must be located away from the
heads and when the shell alone cannot resist the
circumferential bending, ring stiffeners should be
added at or near the supports. Because the size of
rings involved does not warrant further refinement,
the formulas developed in this paper assume that the
added rings are continuous with a uniform cross
section. The ring stiffener must be attached to the
shell, and the portion of the shell reinforced by the
stiffener plus a width of shell equal to 5t each side
may be assumed to act with each stiffener. The ring
radius is assumed equal to r.
When n stiffeners are added directly over the
saddle as shown in Fig. 6·4 (e), the tangential shear
distribution is known . The equation for the resulting
bending moment at any point was developed
previously, and the resulting moment diagram is
shown in Fig. 6-6. The maximum moment occurs at
the horn of the saddle and is given in in.-Ib. for each
stiffener by
M J3 .;...
- K6Or
-
(} sin
-
Figure 6-9. Circumferential bending-moment
diagram, stiffeners adjacent to saddle.
DESIGN OF RING STIFFENERS
n Pf) = Q [
.;1t
= K7 Q
n
Then the maximum combined stress due to liquid
load in each ring used to stiffen the shell at or near
the saddle is given in lb. per sq. in. by
S6 = - !5.zQ ± K60 r
(MJ3 - M1)
or
na
PJ3 = K7 Q
n
nllc
where a = the area and lIe = the section modulus
of the cross section of the composite ring stiffener.
When a ring is attached .to the inside surface of the
shell directly over the saddle or to the outside
surface of the shell adjacent to the saddle, the
maximum combined stress is compression at the
If n stiffeners are added adjacent to the saddle as
shown in Fig. 6-4 (b), the rings will act together and
each will be loaded with shears distributed as in
Section a-a on one side but will be supported on the
saddle side by a shear distribution similar to that
42
th = thickness of head, in.
b = width of saddle, in.
F = force across bottom of saddle, lb.
S1, 8 2, etc. = calculated stresses, lb. per sq. in.
K1, K2, etc. = dimensionless constants for various
support conditions.
M4>, M~, etc. = circumferential bending moment due
to tangential shears, in.-Ib.
8 = angle of contact of saddle with shell, degrees.
shell. However, if the ring is attached to the opposite
surface, the maximum combined stress may be
either compression in the outer flange due to liquid
or tension at the shell due to liquid and internal
pressure.
The maximum combined compression stress due
to liquid should not exceed one-half of the
compression yield point of the material. The
maximum combined tension stress due to liquid and
pressure should not exceed the allowable tension
stress of the material.
(3
= (. 180
Each saddle should be rigid enough to prevent the
separation of the horns of the saddle; therefore the
saddle should be designed for a full water load. The
horn of the saddle should be taken at the
intersection of the outer edge of the web with the top
flange of a steel saddle. The minimum section at the
low pOint of either a steel or concrete saddle must
resist a total force, F, in pounds, equal to the
summation of the horizontal components of the
reactions on one-half of the saddle. Then
=Q
[ 1
+ cos (3 - 112 sin2(3 ]
(3 + sin (3 cos (3
~
a =
180
2
+
Q)
6
= ~ ( 58
180 12
+ 30 ). 2~
= arc, in
7t -
~( ~ +
180
2
JL)
= the central angle, in radians,
20
from the vertical to the assumed point of
maximum shear in unstiffened shell at saddle.
<I> = any central angle measured from the vertical, in
radians.
p = central angle from the upper vertical to the point
of maximum moment in ring located adjacent to
saddle, in radians.
E = modulus of elasticity of material, lb. per sq. in.
Ilc = section modulus, in. 3
n = number of stiffeners at each saddle.
a = cross-sectional area of each composite stiffener,
sq. in.
pP' p~ = the direct load in lb. at the point of
maximum moment in a stiffening ring.
= KaQ
The effective section resisting this load should be
limited to the metal cross section within a distance
equal to r/3 below the shell. This cross section
should be limited to the reinforcing steel within the
distance r/3 in concrete saddles. The average stress
should not exceed two-thirds of the tension allowable
of the material. A low allowable stress is
recommended because the effect of the
circumferential bending in the shell at the horn of the
saddle has been neglected.
The upper and lower flanges of a steel saddle
should be designed to resist bending over the
web(s), and the web(s) should be stiffened according
to the A.I.S.C. Specifications against buckling. The
contact area between the shell and concrete saddle
or between the metal saddle and the concrete
foundation should be adequate to support the
bearing loads.
Where extreme movements are anticipated ·or
where the saddles are welded to the shell, bearings
or rockers should be provided at one saddle. Under
normal conditions a sheet of elastic waterproof
material at least V4 in. thick between the shell and a
concrete saddle will suffice.
Bibliography
1. Schorer, Herman, "Design of Large Pipe
Lines," A.S.C.E. Trans., 98, 101 (1933), and
discussions of this paper by Boardman, H.C., and
others.
2. Wilson, Wilbur M., and Olson, Emery D., "Test
of Cylindrical Shells," Univ. III. Bull. No. 331.
3. Hartenberg, R.S., "The Strength and Stiffness
of Thin Cylindrical Shells on Saddle Supports,"
Doctorate Thesis, University of Wisconsin, 1941.
4. Zick, L.P., and Carlson, C.E., "Strain Gage
Technique Employed in Studying Propane Tank
Stresses Under Service Conditions," Steel, 86-88
(Apr. 12, 1948).
5. U.S. Bureau of Reclamation, Penstock Analysis
and Stiffener Design. Boulder Canyon Project Final
Reports, Part V. Technical Investigations, Bulletin 5.
Nomenclature
= load on one saddle, lb. Total load = 20.
= tangent length of the vessel, ft.
= distance from center line of saddle to tangent
line, ft.
H = depth of head, ft.
R = radius of cylindrical shell, ft.
Q
L
A
Appendix
The formulas developed by outline in the text are
developed mathematically here under headings
corresponding to those of the text. The pertinent
assumptions and statements appearing in the text
have not been repeated .
r = radius
=
= ~ ( .!!
central angle from vertical to
horn of saddle, in degrees
(except as noted).
radians, of unstiffened shell in plane of saddle
effective against bending.
7t -
t
~) =
2
DESIGN OF SADDLES
F
-
of cylindrical shell, in.
thickness of cylindrical shell, in.
43
Maximum Longitudinal Stress
The bending moment in ft.-lb. at the mid-span is
Referring to Fig. 6-3, the bending moment in ft.-lb. at
the saddle is
20
L
+ 4H
2Q
[(L - 2A)2 _ 2HA _ A2
R2 - H2 ]
L + 4H
8
3
2 +
4
3
[2HA + A2 _ R2 - H2] =
3
2
4
3
OA
OL
4
[1 ___-_Z_+_R_2_~_L_H_2_ ]
1 +~
3L
Referring to Section A-A of Fig. 6-4 the centroid of
the effective arc = r sin d. If <5 equals any central
d
angle measured from the bottom, the moment of
inertia is
2f3t
§: (
cos2 0 - 2 cos 0 Si: /1 +
Si~/
) do
where
A
1
4A
nr2t [ L
= nr2t, and
= 3K10L
- H2
1 + 2 R2 L2
(
]
d + sin d cos d _ 2 sin2 d ]
d
[
sin d - cos <5
d
= 30L
)
- - - - = - - - 4 ~L
K1 =
)
1 + 4H
3L
Tangential Shear Stress
Section a-a of Fig. 6-4 indicates the plot of the shears
adjacent to a stiffener. The summation of the vertical
components of the shears on each side of the stiffener
must equal the load on the saddle Q. Referring to Fig.
6-4 (d) the sum of the shears on both sides of the
stiffener at any point is Q sin c'Phtr. Then the summation
of the vertical components is given by
2
~ 1t 0
~
Then the stress in the shell at the saddle in lb. per
sq. in. is given by
S1
_ 4 ~
L
nr2t
The section modulus for the tension side of the
equivalent beam is
r2t
(
51
=
Si~/1
L2
1 + 4H
3L
The section modulus
2r3t [1/2 sin <5 cos <5 + Q _ 2sin <5 sin d + sin2 d <5]~ =
2
d
d2
0
f.lt [sin /1 cos /1 + /1 - 2
1 + 2 R2 .- H2
=
0
sin 2 <l> rd<l>
nr
= 20
1£
.[
<l> _ sin
c'P cos c'P] 1£
2
2
=0
0
The maximum shear stress occurs at the equator
when sin <l> = 1 and K2 = 1/1£ = 0.319.
~
Section A-A of Fig. 6-4 indicates the plot of the
shears in an unstiffened shell. Again this summation
of the vertical components of the shears on each
side of the saddle must equal the load on the
saddle. Then the total shear at any point is
R2 - H2
(1 _ __-_I_+_---'=-2A...:..::L"---_) x
1 + ~
3L
o
sin <l>
r(n - a + sin a cos a)
and the summation of the vertical components is
given by
or
0 sin 2, <l>
rd<l>
~ a r(n - a + sin a cos a)
2 ~n
S1 = 3K1 0L
nr2t
=
where
1t( Si:/1
- cos /1 )
. 2
K, = [ /1 + sin d cos d - 2 Sind
d
[
~
1 (
o[
<l> - sin <I> cos <I>
]1£ = 0
n - a + sin a cos a a
The maximum shear occurs where c'P = a and
K2 = _ _ _s,;:..i..;,..;.n..,.;:a..:...-_ _
n -a + sin a cos a
1
X
~ + R22AL
.- H2 ) 1
Section C-C of Fig. 6-4 indicates the shear transfer
across the saddle to the head and back to the head
side of the saddle. Here the summation of the
vertical components of the shears on arc a acting
downward must equal the summation of the vertical
1 - _L
+-4H
3L
44
component of the shears on the lower arc
acting upward. Then
~
2
ao -~~--=--!.0 sin2 <1>, rd<1>,
~
1t -
2~ [
1[
2
a
Q sin <P2d<I>2
=
a + sin a cos a)
(1t -
~in ex cos ex
ex +
o[
][
COS
4>2 ] :
cos <1> + cos a
- a + sin a cos a
=
]
1t -
The ring compression becomes a maximum in the
shell at the bottom of the saddle. Or if <P = 1t this
expression becomes
0
o[
a - sin a cos a
] [<1>2 _ sin <1>2 cos <1>2] 1t
1t - a + sin a cos a
2
2
a
1 + cos a
]
a + sin a cos a
1t -
Then
Finally
Q (a
- sin a cos a) =
Q (a
+ cos a
]
- a + sin a cos a
- sin a cos a)
1t
1t
The maximum shear occurs when cI>2 = a and
K2
=
sin a [
1t
1t
Design of Ring Stiffeners;
Stiffener in Plane of Saddle
a - sin ~ cos a
]
- a + Sin a cos a
Referring to Fig.6~6, the arch above the horns of the
saddle resists the tangential shear load. Assuming this
arch fixed at the top of the saddles, the bending moment
may be found using column analogy.
If the arch is cut at the top, the static moment at any
pOint A is
Circumferential Stress at Horn of Saddle
See under the heading Design of Ring Stiffeners.
Additional Stress in Head Used as Stiffener
Referring to Section G-G of Fig. 6-4, the tangential
shears have horizontal components which cause
tension across the head. The summation of these
components on the vertical axis is
~a Q
sin cI>, cos cI>, rdcI>1 -
~ 1t Q
sin cI>2 cos cI>2 [
~ 0 1tr
~ a 1tr
-
sin a cos a
]
sin a cos a
rd<1>
20 [<1>, _ sin <1>, cos cI>,] a =
2
[
~ +
or
1t
~
1tr
a
-
a
[
1tr
~ <1> Q sin <1>, rd<1>, = _ ~ <P
a)
=
1tr
o sin2 <1>2
(1t -
Q {[ sin2 cI>1]a _ [
2
1t
0
1t
Ms
1t
a - sin ~ cos a
] [Sin 2 cI>2]1t}
- a + Sin a cos a
2
a
=
!
2
<1»
d<l>,
[ - COS'V1
"" - cos<I> Sin
. 2 ""
'V1 +
2
sin <I> sin <I> cos <P
0,: [
sin2 a
)
1t - a + sin a cos a
- sin If>, cos If>, cos If> - sin 2 <1>, sin
0
-_ -Or
=
2
~
1t
a - sin ~cos a
] rdcI>2
1t - a + Sin a cos a
o(
= Or ~ If> (sin If>,
_ <1>1 sin <I> ] <1>
2
0
1
1
1 -
cos 4> -
~ sin 4> 1
Then the Ms lEI diagram is the load on the analogous
column.
The area of this analogous column is
Then assuming this load is resisted by 2rth and that
the maximum stress is 1.5 times the average
8,
84 = K4 0
= 2 ~P -'- dcI> = gfu:
~o EI
EI
rth
where
K4 = -s3 (
1t -
The centroid is sin P/J3" and the moment of inertia
about the horizontal axis is
sin2 a
)
a + sin a cos a
Ih = 2
Wear Plates
The ring compression at any point in the shell over
the saddle is given by the summation of the
tangential shears over the arc = (cI> - a) shown in
Section A-A or G-G of Fig. 6-4 or in Fig. 6-S. Then
_
~ cI> 0
~ a
sin <I> 2
1t,
(
~ P ( cos <I>
~0
.
2r3 [ 1. sin <I> cos <I> + 1. <I>
EI 2
2
r3 [
a - sin a cos a
) ,dcI>2 _
1t - a + Sin a cos a
EI
45
_
P )2 r3 d<I> =
P
EI
_ sin
2 sin cI> sin B + <I> sin2 B] B=
B
sin pcps
B2
P+ P_ 2
.0
sin2
P
p]
~
VALUES OF
H/L
= .10
H/L
= .05
HfL
=
~ ~
~
=
R
H
.~ ~ ~ ~
t;:~
KI
v/
v"}
~v
0"
"-. ....
......... .........
•8
........
, ....
.6
-" ........ .......
#
0
K~",0
'"
I. o
K,
.8
oj
6
.
-...-;.~ ,
Iff:"r:-
~~
-
.2
J
I. 2
,.'7
~ ..ft!tvr:
.4
J
,,~y
~
~o/
<-v.6/
k
~
""-
"'J
~
~ "- ,"J
,"'-...
~
~~ ~
'""::'-~""-'"''"""'" a""""~V"'""'0"'~8
'""""~" "~O
~
~
"-
~
"
"'-
A
L
"-
~
AOQf2~
'"'"
"YV
----- -
.4
2
0
~
~
"- ""- "-",
,~
"- ,~ ,"'- ,~ "\,......... ,"'- ,"- ~,
(J
VALUES OF
I. 4
V
,~'t;
~~/
........
1,
V
:<lI
~-<-7
1.2
V
V
/
1.4
l.O
?P .~ .~ .~
V V /--"V V V V V V V V V V V V V V
,/'
~ 5- ::::--V / ~- :/V V '/ ~ t/ Y ~ ;:, ~
VV VVV
/" ~V ~ ::/ ~ / V / -:/ -:/ /
-
0
.~ ~
0>
IV V V V V
WHEN
..........
~ ......
"'-
................
.........
~. "'<e ""~o ""'~ ~.
R = 2H
WHEN
Figure 6-SA. Plot of longitudinal bending-moment constant K , "
~; [ ~ sin Bcos J3
The load on the analogous column is
q
= 2 ~ ~ Ms rd<l> = 20r2 ~ ~ (
~
0
= 20r2
q
rtE!
~ sin <1»
1 - cos <l> -
reEl ~ 0
EI
[2~
- 3 sin
~
+
]~
- Or3
= - 2 ~ ~ M.s (
~ 0 EI
~~
rtfl ~ 0
cos <I> -
~
)
M.nr. = Or { 2p
Ih
3
S~2 ~ + BS~2 ~
- 12 sin2 p + 2p2 sin 2p ] }
~2 - 2 sin2 ~
Si~ B ) "
Finally, the combined moment is given by
=-
Ms + M;
= Or {
re
cos cI>
+.
=
3 sin J3 + cos J3 - 1/4 ( cos ·cI> -
<I> sin <I> _ cI> _ sin cI> cos cI>
rtB
~4
2
+
4
<I> sin2 <I> _ sin
2
~
~ (24) -
2 sin 4> - sin 4>
P cos P _
+
Y = ( cos 4> -
given by
M<J)
- Or3 [ 2 sin cI> - cos
+
The distance from the neutral axis to pOint A is
r2dcI> =
- 2 cos 4> - 4> sin 4» ] d4>
+ 4> cos <1»
~
9 _
] p
0
]j!
2~
~ sin ~ cos ~
4r
- 3 sin p
rt
L [ 9~ sin p cos p + 3P2
[ 2 cos cI> - 2 cos 2 cI> - cI> sin cI> cos cI> -
Si~ J3 (2
_
U1
~ cos ~ ]
~
= -.SL
Mi
=
0
The moment about the horizontal axis is
Mh
~ B_
Then the indeterminate moment is
2
[ cI> _ sin cI> _ sin <l> + <I> cos cI>
2
2
Or2
rtE!
d<l>
+
=
[
46
2
~2 sin cI> ~
) x
~
~ )2 + 2 cos2 B
]}
~cosll+1-2(~y
.
4 - 6 (
= ~;
This is the mrXimum when <P
Mp
2
1t
The summation of the horizontal components of the
radial reactions on one-half of the saddle shown in
Fig. 6-8 must be resisted by the saddle at <I> = 1t.
Then this horizontal force is given by
~ cos ~ + ~ ~ +
p sin p -
= Or
Design of Saddles
then
4
4
~
F = ~. 1t O( - cos <I> sin <I> + cos p sin <1» rd<I> =
~ p
r(1t - ~ + sin ~ cos ~)
o[ Finally
o[
Because of the symmetry the shear stress is zero
at the top of the vessel; therefore, the direct load in
the ring at the top of the vessel, Ptl may be found by
taking moments on the arc ~ about the horn of the
saddle. Then
(1 - cos
~)rPt
= Or [
,1t
P - 0 [ 1
t -
1t
-
1 - cos
Psin p
2( 1 - cos ~)
]
~
-
~2 sin ~
= Or (1
Then
- cos
] - (Mp - MJ
1t
Psin p
2(1 - cos ~)
-
cos P (M - MJ
r(1 - cos B) Il
where
Psin B
2(1 - cos B)
cos
B] +
P-
P+
1/2 sin2 p ]
sin ~ cos ~
P-
P+
1/2 sin2 p
sin ~ cos ~
After the article had been published, certain
refinements seemed desirable; therefore, the
following has been added to take greater advantage
of the inherent stiffness of these vessels. The
methods outlined in the paper will give conservative
results.
The effective width of shell has been limited to 10t
in order to prepare the chart of Fig. 6-2. It has been
shown 5 that this effective width may be taken as
1.56 Yrf. That is, where 5t each side of the saddle or
stiffener has been used, the more liberal value of
0.78 vff each side could be used.
The values plotted in Fig. 6-5 for K1 cover
conservatively all types of heads· between H = 0
and H = R. More liberal values are given in Fig.
6-5A for hemispherical and 2 to 1 ellipsoidal heads
for values of HIL between 0 and 0.1. The minimum
values of K1 given in Table 6-1 have not been listed
for specific values of AIL and HIL; so they are
conservative. Specific minimum values of K1 may be
read from Fig. 6-5A.
or
K7 = -1t1 [
=
~
Appendix B
~) -(Mp - MJ
cos B ] +
P ]1t
The bending at the horn would change the saddle
reaction distribution, and increase this horizontal
force.
Substituting the value above for Pt , and solving for Pp
gives
PIl = Q [
K8 =1 + cos
1t -
. 1
(M
MJ
- r( 1 - cos ~)
Il-
1t
1 + cos
1t -
The direct load, PIl , at <I> = ~, the point of
maximum moment may be found by taking moments
about the center. Then
r(PI} + Pt)
112 sin2 <I> - cos <I> cos
1t - ~ + sin ~ cos ~
cos P
(Mil - MJ
Qr(1 - cos P)
If the rings are adjacent to the saddle, K6 and K7
may be found in a similar manner, except that the
static structure would become the entire ring split at
the top and loaded as indicated in Fig. 6-9.
47
Part VII
~nchor
Bolt
Chairs~~~~~~~~~_
w
W
hen anchor bolts are required at supports
for a shell, chairs are necessary to
distribute the load to the shell. Small
tubular columns (less than 4 ft in diameter) may be
an exception if the base plate is adequate to resist
bending. Otherwise, chairs are always needed to
minimize secondary bending in the shell.
For flat-bottom tanks, choose a bolt circle to just
barely clear the bottom without notching it. For other
structures, follow the minimum clearances shown in
Fig. 7-1 a. The designer must evaluate anchor bolt
location for interference with base or bottom plate.
W = total load on weld, kips per lin. in. of weld
WH = horizontal load, kips per lin. in. of weld
Wv = vertical load, kips per lin. in. of weld
= top-plate length, in., in radial direction
c
= top-plate thickness, in.
d
= anchor-bolt diameter,
e
= anchor-bolt eccentricity, in.
e min
= 0.886d
f
= distance, in., from outside of top plate to
e
= cone angle, degrees, measured from axis of
cone
Z
= reduction
Critical stress in the top plate occurs between the
hole and the free edge of the plate. For convenience
we can consider this portion of the top plate as a
beam with partially fixed ends, with a portion of the
total anchor bolt load distributed along part of the
span. See Fig. 7-2.
in.
s = ~2 (0.375g
fc
+ 0.572, based on a heavy hex nut
clearing shell by 1/2 in. See Table 7-1
c = [ :, (0.375g - 0.22d) ]1/2
fmin = dl2 + 118
g
= distance, in., between vertical plates
(preferred g = d + 1) [Additional distance may
be required for maintenance.]
= chair height,
i
= vertical-plate thickness, in.
= vertical-plate width, in. (average width for
tapered plates)
= column length, in.
= bottom or base plate thickness, in.
k
L
m
p
Chair must be high enough to distribute anchor bolt
load to shell or column without overstressing it. If the
anchor bolt were in line with the shell the problem
would be simple - the difficulty lies in the bending
caused by eccentricity of the anchor bolt with respect
to the shell. Except for the case where a continuous
ring is used at the top of chairs, maximum stress
occurs in the vertical direction and is a combination
of bending plus direct stress. Formulas which follow
are approximations, based on the work of Bjilaard.
load, kips; or maximum allowable
anchor-bolt load or 1.5 times actual bolt load,
whichever is less
R
= nominal shell
radius, in., either to inside or
centerline of plate (radius normal to cone at
bottom end for conical shells)
s
= stress at point, ksi
t
= shell or column thickness, in.
(7-2)
Chair Height
= design
= least radius of gyration, in.
(7-1 )
Top plate may project radially beyond vertical plates
as in Fig. 7-1d, but no more than 1/2".
in.
r
- 0.22d)
or
edge of hole
h
factor
Top Plate
Notation
a = top-plate width, in., along shell
b
= weld size (leg dimension), in.
s
=
pet2 .[ 1.32 Z
1.43 ah2 + (4ah2).333
Rt
49
+ .031 ] (7-3)
t'Rf
Table 7-1. Top-Plate Dimensions
Anchor Bolt Nut
Based on anchor-bolt stresses up to 12 ksi for 11/2-in.-dia.
bolts and 15 ksi for bolts 1% in. in diameter or larger;
higher anchor bolt stresses may be used subject to
designer's decision.
d + t)Hole dia
~
H-:; ~"
r: "
-
--,.--+-....~,-:"'..
J
-
c
001,.
Top Plate Dimensions, in.
~TI---r-..:;---L---_~
~~
d
1112
13/4
2
2114
el
(d) Conical Skirt
Figure 7-1. Anchor-Bolt Chairs.
r---j
-L'I ,-\
I
,J
I
r
41/2
4%
5
5114
1.B7
2.09
2.30
2.52
p
0.734
0.919
1.025
1.145
19.4
32.7
43.1
56.6
~
Vertical Side Plates
Be sure top plate does not overhang side plate (as in
Fig. 7-1d) by more than 1/2" radially.
Vertical-plate thickness should be at least
jmin = 1/2" or 0.04 (h - c), whichever is greater.
Another requirement is jk~ P125, where k is the
average width if plate is tapered.
These limits assure a maximum Ur of 86.6 and a
maximum average stress in the side plates of 12.5
To.ol load
H
rcA)'-..
~J
2112
23A
3
3114
Bolt Load, kips
emin Cm/n
I
,
d /
"L
a
If chair height calculated is excessive, reduce
eccentricity e, if possible, or use more anchor bolts
of a smaller diameter. Another solution is to use a
continuous ring at top of chairs.
' If continuous ring is used, check for maximum
stress in circumferential direction, considering the
ring as though it were loaded with equally spaced
concentrated loads equal to Pe/h. Portion of shell
within 16t either side of the attachment may be
counted as part of the ring. (Refer to Fig. 7-3)
Note that the base plate or bottom is also
subjected to this same horizontal force, except
inward instead of outward. This is true even if a
continuous ring is not used around the top of the
chairs - but it should never cause any very high
stresses in the base, so we do not normally check it.
However, it is a good thing to keep in mind in case
you have a very light base ring.
.c
(c) Flat Bottom Tank
'lil
1
11fo
1114
~l=d+ 1
and where earthquake or winds over 100 mph
must be considered.
Maximum recommended chair height h = 3a.
(b) Vertical Column
or Skirt
(a) Typical Plan &
Outside Views
f
I..J
~
Po,Holly
Fixed Ends
Figure 7-2. Assumed Top-Plate Beam.
Where: Z
= _____1..:...;.~0_ _ _ __
,1~ (
7f +
(7-4)
1.0
Maximum recommended stress is 25 ksi. This is a
local stress occurring just above the top of the chair.
Since it diminishes rapidly away from the chair, a
higher than normal stress is justified but an increase
for temporary loads, such as earthquake or wind is
not recommended. The following general guidelines
are recommended.
.,
Minimum chair height h =6", except use h =12"
when base plate or bottom plate is 3/8" or thinner
Figure 7-3. Chair with Continuous Ring at Top.
50
ksi, even assuming no load was transmitted into the
shell through the welds.
Assembly of Chair
For field erected structures, ship either the top plate
or the entire chair loose for installation after the
structure is sitting over the anchor bolts. _
Where base plate is welded to skirt or column in
shop, attach side plates in the shop and ship top
plate loose for field assembly. See Fig. 7-4.
Where base or bottom plate is not welded to shell
in the shop, as for flat-bottom tanks and single
pedestal tanks, shop attach side plates to top plates
and then ship the assembly for field installation.
When you do this, weld both sides at top of side
plates so shrinkage will not pull side plate out of
square. See Fig. 7-5.
Welds between chair and shell must be strong
enough to transmit load to shell. 1/4" minimum fillet
welds as shown in Figs. 7-4 and 7-5 are nearly
always adequate, but you should check them if you
have a large anchor bolt with 'a low chair height.
Seal welding may be desired for application in
corrosive environments.
Assume a stress distribution as shown in Fig. 7-6
as though there were a hinge at bottom of chair. For
the purpose of figuring weld size, the base or bottom
plate is assumed to take horizontal thrust only, not
moment.
Note that loads are in terms of, kips per inch of
weld length, not in terms of kips per square inch
stress. Critical stress occurs across the top of the
chair. The total load per inch on the weld is the
resultant of the vertical and horizontal loads.
Figure 7-6. Loads on Welds.
Formulas may also be used for cones, although
this underrates the vertical welds some.
Wv
WH =
W
=
P
(7.;5)
Pe
(7-6)
a + 2h
ah + 0.667h 2
= y'Wv
+
Wtt
(7-7)
For an allowable stress of 13.6 ksi on a fillet weld,
the allowable load per lin. in. is 13.6 x 0.707 = 9.6
kips per in. of weld size. For weld size w, in., the
allowable load therefore is
9.6w
~
W
(7-8)
Design References
H. Bednar, "Pressure Vessel Design Handbook",
1981, pp. 72-93.
M.S. Troitsky, "Tubular Steel Structures", 1982, pp.
5-10 - 5-16.
P.P. Bjilaard, "Stresses From Local Loadings In
Cylindrical Pressure Vessels," ASME
Transactions, Vol. 77, No.6, 1955.
P. Buthod, "Pressure Vessel Handbook," 7th
Edition, pp. 75-82.
Figure 7-4. Typical Welding,
Base Plate Shop Attached.
-:&16
Figure 7-5. Typical Welding,
Base or Bottom Field Attached.
51
,
•
•
•D
•
Part VIII
Design of Fillet Welds
•
esign of butt welds is closely controlled by
weld details and jOint efficiencies clearly
specified in various codes and specifications.
Design of fillet welds, however, is not so clearly
outlined. The following pages are intended to fill the
gap. While referring to the following pages and
designing fillet welds, the designer is encouraged to
keep in mind actual shop and field welding practice
and the quality of fillet welds that can consistently be
expected. The size and length of the weld as well as
the allowable stresses used in their design should
reflect the actual shop and field welding and not
necessarily the value used here .
Size of an equal-leg fillet weld is the leg width W
of the largest 45° right triangle which fits in its cross
section. They are referred to by their leg sizes, such
as a 1/4 in. fillet weld.
following:
1. Use of 45° (equal leg) fillet welds whenever
possible
2. Minimum size of fillet
3. Lower cost of down welding position
4. Locate weld to eliminate eccentricity
5. Balanced welds to control distortion
6. Avoid locating welds in highly stressed areas
7. Readily accessible
Use the smallest size of fillet permitted (see Fillet
Weld Limitations). Flat fillets 5/16" and smaller are
normally made in one pass and are more economical
than larger fillets. Generally, the fillet with the least
cross-sectional area is the most economical.
Increasing the size of a fillet weld from 1/4" to 3/8"
more than doubles the amount of filler metal, but the
strength only increases 500/0. A gap also requires
additional filler metal.
I
Figure 8-1. Fillet-Weld Sizes (Leg Dimensions) . .
~
I
,
Size of an unequal length fillet weld is described
by the leg lengths of the largest right triangle which
fits in its cross section, such as a 3/8" by 1/2" fillet
weld.
The strength of a fillet weld is assumed to equal
the allowable shearing stress times the throat area of
the weld. The throat area of a weld is the length of
weld times the theoretical throat distance, which is
the shortest distance from the root of the weld to the
theoretical weld's surface.
Some codes, however, define the throat distance
differently.
AWWA defines the throat as .707 times the length
of the shorter leg of the fillet weld.
AISC distinguishes between welding processes to
be used when determining throat distances (e.g.
AISC 1.14.6.2). The designer should check to see
what code, if any, applies to the work.
In these papers, however, the fillet weld throat
dimension for an equal-leg fillet is assumed to be the
leg length times 0.707 (i.e. cos 45°).
" triangle
volumes
9 triangle
volumes
13 friangle
volumes
Figure 8·2. Volumes of 1-ln. Long Welds.
Flat welding position is the most economical and
overhead the least. For example, the relative costs of
3/8" fillets for different positions are:
lap flat
flat fillet
vertical fillet
overhead fillet
1000/0
11 00/0
240 0/0
250 0/0
The costs can vary according to weld procedure
used.
Specify shop welding whenever practical. The
fitted-up material can normally be repositioned easier
in the shop.
Types of Fillet Welded Joints
Single-fillet welded joints
Strength depends on size of fillet.
Do not use when tension due to bending is
concentrated at root of weld.
Economy of Welding
Economical design of fillet welds includes the
53
Allowable Loads on Fillet Welds
Do not use for fatigue or impact loading.
Difficult to control distortion.
Stress in a fillet weld is assumed as shear on the
throat area, for any direction of applied load.
Many codes express the allowable shear stress for
fillet welds in psi on the throat area. It is more
convenient, however, to express the strength of fillet
welds as allowable load f, kips per lin. in. for 1" fillet.
The following formula may be used to convert
allowable shear stress on throat area to allowable
load for 1" fillet with equal leg lengths:
Figure 8·3. Types of Single Fillet Welds.
Double-fillet welded joints
Used for static loads.
Economical when fillet size is 1/2" or less.
Lap joint maximum strength in tension when length
of lap equals at least 5 times the thickness of thinner
material.
Figure
8~4.
f
= 0.707
x allowable shear stress, ksi
(8-1)
Since transverse welds are stronger than parallel
(or longitudinal) welds some codes permit different
allowable stresses for them. API 620 6th Edition and
AWWA D100-84 are two codes that have different
allowable stresses for the two types of welds. API
650 8th Edition and AISC 9th Edition, however, make
no distinction between transverse welds and parallel
welds and use the same allowable stress for both.
The designer is cautioned to check which code
applies to the work at hand as well as the most
recent edition of the code to see if their approach to
these types of stresses has changed.
In the following pages, however, for the sake of
completeness, a distinction will be made between the
two types of stresses, fp and ft.
When a jOint has only transverse forces applied to
the weld, use the allowable transverse load ft. If only
parallel forces are applied to the weld, use the
allowable parallel load fp• If one of the forces is
parallel and the other forces are transverse, use the
allowable transverse load when the resultant force is
found from Eq. 8-3.
New specifications on allowable stress for fillet
welds are given in Section 8 of the latest revision of
AWS Structural Welding Code, 01.1.
Current AISC specifications also refer to:
1. allowable stress at weld for both weld metal and
base metal
2. minimum length of fillet weld
3. minimum size of fillet weld
4. maximum size of fillet weld
5. end returns or "boxing of welds"
6. spacing of welds
7. fatigue loading of welds
Types of Double Fillet Welds.
Double-fillet welded corner joint
Complete penetration and fusion.
Used for all types of loads.
Economical on moderate thickness.
Figure 8·5. Corner Joint.
Welds transmit forces from one member to
another. They may be named according to the
direction of the applied forces.
Parallel welds have forces applied parallel to their
axis. Fillet weld throat is stressed only in shear.
Parallel welds may also be called longitudinal welds.
Figure 8-6. Parallel Weld.
Notation
Transverse welds have forces applied at right
angles to their axis. Fillet weld throat has both shear
and normal (tensile or compressive) stresses.
Transverse welds are about 33 0/0 stronger than
parallel welds.
A
= cross-section area, sq. in., of member
transmitting load to weld
Aw = length, in., of weld
b
= length,
C
= distance, in., from neutral axis to outer parallel
surface or outer point
in., of horizontal weld
= horizontal component of c, in.
C v = vertical component of c, in.
d = depth, in., of vertical weld
f = allowable load on fillet weld, kips per lin. in.
per in. of weld size
Ch
Figure 8·7. Transverse Weld.
54
r
fb
fp
= bending stress, ksi
= allowable parallel load on
ft
=
f to
=
=
I
10
Ix
Iy
J
=
=
=
=
Jw
=
L
M
=
n
p
=
=
Q
=
=
r
=
S
=
Sw =
t
T
v
=
=
=
w
W =
Wb =
Wh =
Wq =
Ws =
Wsa =
Wt =
Wv =
x
y
=
=
Fillet weld size w, in., is found by dividing the
force W, kips per lineal inch, on the weld by the
allowable load f (kips per lin. in. for 1" fillet) for the
weld.
W=W
(8-2)
f
fillet weld, kips per
lin. in. per in. of weld size
allowable transverse load on fillet weld, kips
per lin. in. per in. of weld size
torsional stress, ksi
moment of inertia, in.4, of member transmitting
load to weld or of weld subjected to torque
moment of inertia about 0 axis, in.4
moment of inertia about x axis, in.4
moment of inertia about y axis, in.4
polar moment of inertia, in.4, of member
transmitting load to weld
polar moment of inertia, in. 3, of weld lines
subjected to torque
column length, in.
bending moment, in.-kips
number of plate sides welded or number of
welds loaded
allowable concentrated axial load, kips
statical moment of area, in.3, above or below a
point in cross section, about neutral axis
least radius of gyration, in.
section modulus, in.3, of member transmitting
load to weld or of weld subjected to moment
section modulus, in.2, of weld lines subjected
to bending moment
plate thickness, in., or thickness, in., of
thinnest plate at weld
torque, in.-kips
vertical shear, kips
fillet weld size (leg dimension), in.
total load on fillet weld, kips per lin. in. of weld
bending force on weld, kips per lin. in. of weld
horizontal component of torsional force on
weld, kips per lin. in. of weld
longitudinal shear on fillet weld, kips per lin.
in. of weld
average vertical shear on fillet weld, kips per
lin. in. of weld
actual shear on fillet weld, kips per lin. in. of
weld
torsional load on fillet weld, kips per lin. in. of
weld
vertical component of torsional force on weld,
kips per lin. in.
distance from y axis to vertical weld
distance from x axis to horizontal weld
Table 8-1. Formulas for Force on Weld
Type of Loading
Common
Design
Formula for
ormulas for Force on Weld
. Stress, psi
Tension or
Compression
Vertical
Shoar
Bending
Torsion
Longi~udinal
Shear
P
A
V
A
K/Kips per In.
w
p
- Aw
v
w-s~
M
5
Tc
T
w _ Tc
t
Jw
YQ
tr
Force W on a weld depends on the loading and
shape of the weld outline. Table 8-1 shows the.. basic
formulas for determining weld forces for various
types of loads.
Combining forces: There may be more than one
force on the weld, such as bending force and shear
force. It is usually easier to determine each force
independently and then combine vectorially to obtain
a resultant force. All forces which are vectorially
added must occur at the same position in the weld.
Be sure to find the position on the welded
connection where the combination of forces will be
maximum.
To simplify calculations increase parallel forces by
the ratio ftlfp before combining to account for the
lower allowable parallel shear stress specified by
some codes.
Combined Loads on Welds
It is necessary to designate the size and length of
fillet welds. Since neither are known, it is usually
simpler to assume the length and then calculate the
size.
55
w =
~ = ~ = 0.25" Use 1/4" fillet
f
9.6
Weld volume = (1/4)2 x 12.5 = 0.39 cu. in.
2
w
TryA w2 =5+5=10"
W2
=~
W2
=
Aw2
Figure 8·8. Forces on Weld Combined.
=
~ = 0.312"
Use 5/16" fillet
9.6
Use 1/4" fillet on three sides because of less weld
volume. Check fillet size (see Fillet Weld Limitations).
(8-3)
Shear load is considered uniformly distributed
over the length of weld. Force formula Ws = VIAw
from Table 8-1 gives average shear force. Use
average shear force when combining with bending
force or torsional force. However, if the average
shear force about equals or exceeds the bending or
torsional force, determine the actual shear force
distribution to aid in locating the maximum combined
force.
The actual shear force per weld at any point can
be determined from:
Refer to Fig. 8-8 for explanation of W1 , W2 ,and W3 •
The total force shall be determined in accordance
with the applicable code.
Simple tension or compression loads: The force W,
kips per inch of weld, is the load P divided by the
length Aw of weld. As shown in Table 8-1 the tensile
or compressive force on a weld is:
W=
f
10
Weld volume = (5/16)2 x 10 = 0.49 cu in.
2
To determine the resultant force for combined
forces, use Eq. 8-3. If only two forces exist, use 0 for
one force.
W = tfW 1 2 + W2 2 + [ W3 (ft lfp)1 2
~
= ~ = 3.0 kips per lin. in.
P
Aw
(8-4)
(8-5)
With this force W, the required fillet weld is
calculated from Eq. 8-2.
Example: Find size of fillet welds for the
connection shown in Fig. 8-9. Assume Aw
+ 2112 = 12112".
=5
For example, the average shear force and actual
shear force distribution are compared for a
rectangular member in Fig. 8-10.
+ 5
mox
.hear
force
lf2 ~
~I~~·:1·¥
t
W
1 'to-
.ectlon
thru member
at weld
30,000 lb.
Figure 8..9. Tension-Member Connection 1 •
= ~ = 2.4 kips per lin.
Average shear force Ws
=~
Aw
Wsa at 1
in.
12.5
= VQ =
nl
VQ tQ
2 4
2
(t1~)
Wsa at 2 = VQ = ~ = 0
nI
nI
=
actual
.hear
forc.
diagram diagram
Figure 8·10. Shear Distribution at Welds.
Referring to API 650 the allowable basic shearing
stress of an E60 electrode fillet weld is 13.6 ksi.
f = (.707)(13.6 ksi)(1 inch weld) = 9.6 kips/inch/1
inch weld
W = ~
Aw
avg
.hear
force
=
1AISC for E60 electrodes would give f
(.707)(.3)(60)
12.7 ksi
shear stress with max shear stress on base metal of .4 yield of
base metal.
=
JL.
(8-6)
2d
= 3V
= 1.5Ws
(8-7)
4d
(8-8)
Bending or torsional load may be applied to the
same weld outline.
56
Table 8·2. Properties of Weld Outlines
(Treated as a Line)
r
Bending and
shear load
on a weld
Torsional
and shear load
on a weld
Bending
(abollt x-x axi s)
Outl ine of
Welded Joint
dG-- x
..Jt..
d[+-+x
Weld outline
Figure 8-11. Moment and Torque on Weld.
l
[1F~~,Y-
d
I
_..J.
~;2(b+dl
d(3b l + d2 )
6
J
Sw • bd
2
l
J w • b{b + 3d )
w
3
w
..
6
-'--j
b
(8-9)
J w " 12 in.'
2
S .. -d
dE.:--x
t71 j
d'
d
in.:Z
Sw - 6
~
In the figure with the bending load, the weld must
transfer the same stress as in the member at the
connection. This stress can be determined using the
common formula for bending stress.
Torsion
). ~(4b + d)
S (
w top
6
d' (4b,. d'
•
Sw(bott)· 6(2b+d) J w
~l.6b2dl
12(b
+d)
2[b+d)
-_._---+._---------_
... _......_._--_.._-
In the connection with the torsional load, the weld
wants to rotate or twist about the center of gravity of
the weld group. The stress in the weld can be found
from:
Ef
(max forc:e at botl)
y'"
d
x
I
---:t
.
S
w
r.
bd+ -d'
6
b+d
.J x- 2L
(8-10)
~
d~y
However, before using these formulas, it is
necessary to determine the section modulus S or
polar moment of inertia J of the weld without
knowing its width (size). A simple way to determine
the section modulus or polar moment of inertia of the
weld is to treat the weld as a line. The property,
such as section modulus S, of any thin area is equal
to the property of the section when treated as a line
Sw times its thickness w.
_'d
y
2
Y-t+"2tJ
-
b
r-1
dEUx
dE-6-
(8-11 )
x
~
(:2b· d)' b'(b.d)'
- --I w,.. .-- 12
2b + d
--.- ...-----_..
S ( ) d(2b+d)
w top"
1
d2 (2b+d) J (b+2d)' _d'(b+d)l
b+ 2d
Sw(bott)- 3(b:d) w 12
D
fmox force ot Dott)
d2
Sw - bd +3
s • 77d
w
4
l
J
.. (b +d)'
w
J
w
6
_ 77d'
4
Revised and expanded outline properties given in Lincoln Electric pub·
lication 0810.17. Solutions to Design of Weldments. p. 3.
The common formula for bending stress can now
be used to find the bending force on the weld.
Bending and shear forces on a welded connection
are combined vectorially after determining each force
(8-12)
independently from Eqs'. 8-12 and 8-6. Determine the
combined force Won the weld using Eq. 8-3. Make
sure you have found the position on the welded
connection where the combination of forces will be
maximum. See Fig. 8-10 for shear force distribution.
Calculate the required weld size from Eq. 8-2.
Properties of sections treated as lines for typical
weld outlines are shown in Table 8-2. The method
for determining these properties is given later.
When designing welds using the line method,
select the weld outline with care. Several
combinations of line welds will produce the required
property Sw or J w ' However, select the weld outline
where the weld distribution is consistent with the
load distribution in the member at the connection.
For non-circular members (such as beams, channels,
etc.) resisting torsion loads, transverse forces on the
weld are present in addition to parallel forces
computed from Tc/Jw. These transverse forces are
the result of the non-circular cross section warping
and should not be neglected.
Figure 8·12. Bending and Vertical Shear on Welds.
57
Example: Find size of fillet weld on clip
loaded as shown in Fig. 8-13.
Use f t = 8.9 kips per lin. in.
and fp = 6.4 kips per lin. in.
from API 620. Assume length
of fillet = 10" (5" each side)
4k
Sw from Table 8-2
= cJ2 = 52 = 8.33 sq. in.
3
Bending force Wb =
3
M =
Sw
4 x 3
8.33
= 1.44 kips per lin. in.
Avg shear force Ws
Figure 8-14. Torque and Shear on Welds.
= Aw
X = ..i.
10
= .40 kips per lin.
The horizontal torsional force component is
in.
Wh
= If.Jt.
(8-14)
Jw
The vertical torsional force component is
Wv
Figure 8-13. Loaded Clip.
ft
fp
= (.707) (12.6 ksi) (1
= (.707) (9.0 ksi) (1
inch weld)
inch weld)
Resultant force W =
= B.9
kips/inch/1 inch weld
inch weld
Wb 2 + [ Ws ( :; )
(8-15)
Jw
Equation 8-3 can now be used to find the resultant
force on the weld. Increase the forces parallel to the
weld at the point considered by ftlfp before
combining.
The required fillet size is calculated from Eq. 8-2.
= 6.4 kips/inch/1
y'
= B2n
r
Example: Find fillet size for connection
2
3"
0/1.44 + [ 0.40 ( ::: ) ]'
Fillet size
= 1.544 kips per I.in.
w = W = 1.544 = .173"
ft
3*"
Sk shown in Fig. 8-15.
Use ft
lin. in.
in.
= fp = 9.6
kips per
8.9
Use 3,/16" fillet
w
Note that the designer is still cautioned to check the
shear capacity of the plate.
C
h
~~u>l
Torsional and shear forces on a welded connection
are combined vectorially after determining each force
independently from Eq. 8-6 and the torsional force
formula
cg
-J '
(8-13) .
(b)
"i
Figure 8-15. Loaded Bracket.
From Table 8-2,
Maximum torsional force occurs at the most distant
x
weld fiber measured from the center of gravity of the
weld outline. This distance to the outer fiber is c in
Eq. 8-13.
The direction of the ,torsional force Wt may be
other than horizontal or vertical. By resolving the
torsional force into vertical and horizontal
components, the problem of combining forces is
simplified. Resolve the torsional force into
components by using the horizontal and vertical
components of dimension c as indicated by Eqs.
8-14 and 8-15.
=
Jw =
b2
2 _ _ = 0.75"
= _ _3_
2b + d 2 x 3 + 6
(2b + c/)3 _ b2 (b + d)2
2b + d
12
= (2
x 3
12
58·
+
6)3 _ 3 2 (3 + 6)2
2 x 3 + 6
= 83.25
in.3
Find components of maximum torsional force at 1.
Cv =
Ch
T
3"
=3
-
x = 2.25"
By Eq. 8-14, the horizontal component of torsional
force is
Wh =
Figure 8-16. Examples of Built-up Members.
Longitudinal shear force at any position along the
length of beam is calculated from
IQv.
Jw
= 5{3.75 +
2.25) (3)
83.25
=
Wq
=
VQ
(8-16)
, ni
Longitudinal shear force may vary along the length
of the beam. The vertical shear diagram for the
beam can be used as a picture of the amount and
location of welds between flange and web.
1.08 kips per lin. in.
NOTE: (3.75 + 2.25) is the distance from the point
load to the centroid of the weld.
t
By Eq. 8-15, the vertical component of torsional
force is
Wv = IQb.
~
,
1 L
~
til"" 11111\
Seom 3
Seam 2
Seam 1
Jw
~
= 5(3.75 + 2.25)(2.25)
83.25
= 0.810 kips per lin. in.
Figure 8-17. Shear in Beams.
Find average vertical shear force:
Ws
Notice there is no shear in the middle portion of
beams 1 and 2; therefore, little or no welding is
required in this portion. When there is a difference in
shear along the length of beam, as in beam 3, the
welding could vary in this same ratio along the
length of beam. This is why continuous welding is
sometimes used at the ends of beams and reduced
size or intermittent fillet welds used throughout the
rest of the beam;
= - V = - -5- 3 + 6 + 3
Aw
= 0.416 kips per lin. in.
Combine forces using Eq.8-3.
W = y(00810 + 0.416)2 + [ 1.08 (
~::
)] 2'
Built-up members subject to axial compression:
Welds joining the component parts of a built-up
compression member, such as a cone roof tank
column, are also stressed in longitudinal shear.
Determine this longitudinal shear force Wq from Eq.
8-16 using the shear V at any position along the
member as given by Eq. 8-17 or 8-18.
= 1.635 kips per lin. in.
Calculate weld size using Eq. 8-2.
W
= W
f
= 1.635 = 0.17"
9.6
Use 3/16" fillet.
Built-up members subject to bending:
Welds attaching the flange to the web are stressed
in longitudinal shear and must be adequate to
transfer the calculated longitudinal shear force.
"Note that if we had been using API 620 where ft = 8.9 kips per
lin. in. and fp = 6.4 kips per lin. in., this equation would be
(::!)
= 0.01P for Ur < 60
(8-18)
Also at each end of a built-up compression
member, use a total length of continuous fillet weld
equal to the maximum width or depth of the member
or 4", whichever is greater.
Fillet weld size at any position along the beam or
column is determined from Eq. 8-2 with the
longitudinal shear force Wq at the same position.
Welds in Built-up Members
(.810 + .416)2 + [ 1.08
(8-17)
V
Check fillet size (see Fillet Weld Limitations).
W =
V = 0.02P for Ur> 60
r
W
= W =
f
59
~
fp
(8-19)
Table 8-3. Length and Spacing of Intermittent Welds
Continuous
Welds 0/0
Length of Intermittent Welds and
Distance Between Centers, In.
60
57
50
44
43
40
37
33
30
25
20
16
3-5
2-4
Maximum clear space between intermittent fillet
welds depends on the component parts of the built-up
member. The clear space between welds must be close
enough to prevent local buckling of the component
parts when the loading develops the full strength of the
built-up member.
4-7
4-8
4-9
3-6
,
Example: Find size and spacing of fillet weld
joining plate and angle of built-up member shown in
Fig. 8-19. Use ft = 8.9 kips per lin. in., fp = 6.4 kips
per lin. in.
3-7
2-5
4-10
3-8
3-9
3-10
3-12
2-6
2-8
2-10
2-12
4-12
O'170 kips ~er ft
~
7.33'
~...Ili:.
O.612"E~1 ..
1.575" .~
2" x ,~ .. x 3/16"
~
"<tltQjj] v •
shear diagram
Use intermittent fillet welds when the calculated
leg size is smaller than the minimum specified in
Table 8-5. The calculated size divided by the actual
size used, expressed in percent, gives the length of
weld to use per unit length:
0/0
Intermittent weld lengths and distances between
centers for given percentages of continuous welds
are shown in Table 8~3.
12"
12"
r
2".J
6"
Vi
2-12
~
~2"
~2"~&
•• r
W
012=W
6"
12"
I L
~.I
&
l-2"
Shear diagram for beam shows that welding for
longitudinal shear could be reduced in center portion
of beam. Because the vertical shear is small, design
the welds for maximum shear throughout the length
of beam.
The longitudinal shear force is
W = VQ = 0.623(0.1875)6(0.518)
q
nI
1(1.094)
_~
= 0.332 kips per lin. in.
9
The continuous weld size required is
..r .....
w
Figure 8-18. Spacing of Intermittent Welds.
Minimum size fillet from Table 8-5 is 3/16".
Compression
rolled shape
flange
24"
plate flange
22t (12" max)*
rolled shape
flange
24"
continuous weld
= 0.052
0.1875
Table 8-4. Maximum Clear Space
Between Intermittent Fillet Welds
(Carbon Steel BUilt-up Members)
Tension
6.4
(Use fp because longitudinal shear force is parallel
to weld.)
0/0
24t (12" 'max)*
= ~ = 0.332 = .052
fp
Minimum length of fillets for intermittent welds is 2"
or 4w, whichever is greater. Selecting the longest fillet
possible is usually the most economical. However, do
not exceed the maximum clear space between fillets in
Table 8-4.
plate flange
• 0.623 kips
Figure 8-19. Plate Girder.
= calculated leg size (continuous) x 100 (8-20) .
actual leg size (intermittent)
,6 6 ·b
~I .p...
0.17(7.33)
2
x 100
= 27.70/ 0
Minimum length fillet permitted for intermittent
welds is 2".
Maximum clear space between fillets is, from
Table 8-4, 22 x 3/16 = 4.1".
Maximum spacing with 2" fillet = 2" + 4.1" =
6.1" .
Use 2" - 6" intermittent fillet on one side. This
provides 33 0/0 (Table 8-3) continuous weld which is
more than adequate to transfer the calculated
longitudinal shear.
Fillet Weld Limitations
* Many of the built-up members we use have an assumed flange. This
Minimum size fillet: The calculated weld size may
be small. To eliminate cracks resulting from rapid
cooling, it is best not to put too small a fillet on a
thick plate. Follow Table 8-5 for minimum sizes.
flange, usually part of a roof, bottom or shell, may be partially
restrained from local buckling when the maximum load is applied.
When the built-up member has restraint on the flange, the clear space
between fillet welds could be increased to about 32t maximum.
60
3
d
- w1y -
From handbook,
Table 8-5. Minimum Size Fillets
12
When w is small, let Iy = 0
Thickness'
~
~
>
Minimum Leg Size
Of Fillet2
J
3/16"
1/4"3
114"3,4
112"
3/4"
3/4"
Jw
b
b
~
'2
'2
Ix
-,-_x
E=~31-:1'~o Ix
w
of roll.d
lec:tion
max fillet· t
(8-22)
12
= 10
+ Ay2 = 0 + wby2
S
= wby2
= Ix
-:- y
= wby
Treated as a line, then
Sw = ~ = by about x axis
w
Minimum length of fillets for strength welds:
11/2" or 4w, whichever is greater
(Use 2" or 4w for intermittent welds)
(8-23)
From handbook
3
- wb
IY -
Spacing of Fillet Welds:
1. When bars or plates are connected only by a
set of parallel longitudinal fillets, the length of
those welds should not be less than the
perpendicular distance between those two
welds.
2. When fillet welds are used for end connections,
the distance between them must not be greater
than 8 inches unless transverse bending is
otherwise prevented.
12
J
= Ix
+ Iy
= wby2
+ wb
3
12
Treated as a line, then
J w = ,{ = by2 +
w
l!!...
(8-24)
12
By adding the properties of the two basic lines in
Figs. 8-21 and 8-22, properties for other straight line
outlines may be determined. For example, find Sw
and J w for the outline in Fig. 8-23:
Determining Weld Outline Properties
Properties Sw and J w of a weld outline when treated
as a line are nearly equal to the section modulus or
polar moment of inertia divided by the width w of the
weld. When w is small, say 100/0 of d, the error is
usually less than 10/0.
The properties Sw and J w in Table 8-2 are
determined as follows:
From handbook
y
w
Figure 8-22. Horizontal Weld.
y
Figure 8-20. Weld Size Limited to Plate Thickness.
x
= ,{ = s!!..
j
t
1x"-- -wcJ3
12
S = Ix -:- Q
2
+ 0
12
I
max fill.t - t
= wcJ3
12
From handbook, for a horizontal
3
weld, 10 = w b
o
Maximum size fillet for strength welds:
~dg •• fPI.t.
+ ~
Treated as a line, then
1Thickness of thicker part to be joined,
2Leg size of fillet need not exceed thickness of thinner part to be
joined.
3A minimum fillet of 3/16" is acceptable provided 200°F preheat
or surface examination of the weld (PT,MT) is performed.
4AWS 01.1-82 or AISC require a.minimum 5/6" fillet.
dge
=~
= wcJ2
6
Treated as a line by dividing by w,
then
Sw = ~ = cJ2 about x axis
(8-21)
w
6
II
Figure 8-21. Vertical Weld.
]I
Figure 8-23. Combination of Welds.
61
Ix
=2
wcJ3 + 2 (Wby2)
12
= wcJ3
Cautionary Note
+ 2wby2
6
Some designers and engineers are not aware of a
form of cracking called lamellar tearing, which can
occur beneath highly stressed T-joints in steel plate.
Plate forced to deform plastically in the thruthickness direction by welds which are large, mUltipassed, and highly restrained can decohere at a
plane of microscopic inclusions. A crack may then
progress from plane-to-plane in a terrace-like fashion.
While lamellar tearing is not frequent, even one
incident has the potential of becoming a serious
problem. Since there are means to minimize the
hazard, it behooves the engineer to take every
precaution by optimizing joint design and welding
procedure selection. Where these factors cannot be
controlled, it may be necessary to use special steels.
The reader is referred to the following sources for
guidance in designing against lamellar tearing:
1. Engineering Journal, Third Quarter, 1973, Vol.
10, No. 3, pages 61-73. American Institute of
Steel Construction, Inc., 1221 Avenue of the
Americas, New York, New York 10020
2. Bibliography on Lamellar Tearing, Welding
Research Council Bulletin 232. Welding
Research Council, 345 East Forty-Seventh
Street, New York, New York 10017
When y = Q,
2
Ix
+ wbcJ2 = wd2 (d + 3b)
626
= wcJ3
3
_ wb
wb3 - 0 + 21y 12
6
Sw =
(iL)
1.. = 2wcJ2 (d + 3b)
w d
6wd
= cJ2 + bd about x axis
3
Jw
= .i.... = Ix
= b3
+ Iy = wcJ2 (d + 3b) + wb 3
w
w
(S-25)
+ 3bd2 + cJ3
6w
(S~26)
6
62
Part IX
Inspection and Testing
of Welded Vessels
necessary for the test is accomplished by means of
a vacuum box placed on the top side. This box has
a glass top and is open on the bottom. The portion
of the weld to be inspected is brushed with a soapy
solution, the box is fitted over it, and a vacuum
created in the box. The weld is inspected through
the glass top for leak-indicating bubbles.
treatise on the subject of defects in welded
vessels and their detection is beyond the
scope of this work. But an acquaintance with
some of the available inspection and testing tools
may serve to dispel the mystery of unfamiliar terms.
In the interest of economy, the refinement of
inspection and testing must be in tune with the
degree of perfection necessary for various classes of
work. For example, a pressure vessel storing a lethal
substance, or one constructed of a special material
known to be crack sensitive, may require as a
minimum that 1000/0 of all main joints be
radiographed. On the other hand, simple structures
such as oil and water tanks, constructed of readily
weldable materials, usually require only spot
examination. In general, it is safe and wise to follow
the inspection requirements of the applicable codes.
First, let us distinguish between hydrostatic or
overload testing to demonstrate strength or liquid
tightness, and inspection to determine weld quality.
A
Inspection for Weld Quality
Prior to the beginning of any welding, weld qualification
and welder certification tests should be performed.
These tests insure that the type of welds proposed
are adequate for the application and that the workers
proposed to be used are capable of applying the
required welds.
VISUAL INSPECTION is usually the first stage in
the inspection of a finished weld, regardless of any
other tool that may be employed. Visual inspection
can determine conformity with specifications as to
dimensional accuracy, extent, etc. It can also reveal
noticeable surface flaws, such as obvious cracks, .
surface porosity, undercutting of parent metal, etc. In
some types of work, visual inspection is the only
inspection performed; e.g., welds subjected only to
compression as in a tubular column, or low-stressed
fillet welds. But for most important structures, further
inspection is usually required for the main joints, on
which the strength of the structure depends. Some of
the more commonly used methods are described below.
RADIOGRAPHY is an inspection method that
shows the presence and nature of macroscopic
defects or other discontinuities in the interior of
welds. Just as in the case of medical X-rays with
which we are all familiar, radiography utilizes the
ability of X-rays or gamma rays to penetrate objects
opaque to ordinary light. Radiograph films can reveal
slag (non-metallic) inclusions, porosity or gas
pockets, cracks, lack of fusion, inadequate
penetration, and even surface defects, such as
undercut. However, welds are rarely perfectly free of
all minor defects nor do they need to be. As a result,
the inspector must have a good background of
experience in reading films, and a knowledge of
standards. The various construction codes, such as
AWS and ASME, define limits of acceptability.
MAGNETIC PARTICLE INSPECTION is an aid to
Testing for Strength and Tightness
Required overload tests are clearly outlined in the
various governing codes. Whenever the structure
itself, its supports, and foundation conditions will
permit, the overload test is usually hydrostatic, i.e.,
the structure is full of water when the overload,if
any, is applied.
For the water and oil tanks of Volume 1, no
overload can be applied other than that inherent in
any difference between the specific gravity of water
and that of the product to be stored in service. The
normal cone roof will withstand pressures only
slightly greater than the weight of the roof plates. It
will not withstand hydrostatic pressure due to
overfilling. Hence, the water test level is limited to
the top capacity line.
The testing of the flat bottom, however, may
warrant brief comment. The liquid tightness of a flat
bottom is usually demonstrated by means of a soap
bubble test. A soapy liquid is brushed on the weld
and a small differential positive pressure created on
the opposite side of the plate. Leaks in the weld will
be indicated by bubbles as the air passes through
the leak. Since the bottom of a tank is inaccessible
from the underside, the differential pressure
63
When a FLUORESCENT PENETRANT is used, the
indications will fluoresce when exposed to near ultra
violet or black light. DYE PENETRANT utilizes visible
instead of fluorescent dyes. As the dye penetrant
rises from the flaw by capillary action, it stains the
developer (usually a chalky substance) and clearly
marks the flaw.
ULTRASONIC INSPECTION requires a. great deal
of explanation for even a rudimentary understanding
of how it works. Briefly, ultrasonic testing makes use
of an electrically timed wave of the same nature as a
sound wave, but of. a higher frequency, hence the
name ultrasonic. The sound wave or vibrations are
propagated in the metal being inspected and are
reflected back by any discontinuity or density
change. The search unit contains a quartz or similar
crystal, which can be moved over the surface much
like a doctor's stethoscope. The search unit applies
energy to the metal surface in short bursts of sound
waves for a very short, controlled period of time. The
crystal then ceases to vibrate for a sufficient period
of time to receive the returning echoes. The reflected
signals are indicated on a cathode ray tube or
oscilloscope. From the reflection or oscilloscope
pattern, a trained operator can determine the
distance to the discontinuity and some measure of its
magnitude.
Ultrasonic testing is a valuable tool for certain
applications. But it must be used only by an operator
skilled in the interpretation of the reflection patterns.
In addition to the above methods the following can
be used: Eddy Currents, Acoustic Emission, Video
Enhancement, Ultrasonic Holography, and Neutron
Radiography. Only technically qualified personnel
should use these methods.
visual inspection for surface defects too fine to be
detected by the naked eye, plus those that lie slightly
below the surface. With special equipment, more
deeply seated discontinuities can be detected. The
method is applicable only to magnetic materials. It
will not function on non-magnetic materials such as
the austenitic stainless steels.
The basic principle involved is as follows: When a
magnet,ic field is established in a ferro magnetic
materiai containing one or more discontinuities in the
path of the magnetic flux, minute poles are set up at
the discontinuities. These poles have a stronger
attraction for magnetic particles than the surrounding
surface of material.
Normally the area to be inspected ' is magnetized
between two "prods" by introducing high amperage
current or some other convenient means. Then the
area is covered with a powder of finely divided
magnetic particles " These form a visible pattern of
any discontinuity due to the stronger attraction at
those points.
LIQUID PENETRANT INSPECTION is another
method for detecting surface discontinuities too small
to be readily seen by the naked eye. It is particularly
useful on non-magnetic materials where the
magnetic particle method is ineffective.
The method utilizes liquids with unusual
penetrating qualities, which, when applied to a
previously cleaned surface, will penetrate all surface
discontinuities. The surface is then cleaned of all
excess penetrant and a developer applied. Penetrant
that has entered a crack or other discontinuity will
seep out, make contact with the developer and
indicate the outline of the defect.
There are two principal types of penetrant used;
64
Part X
Appendices
A.
B.
C.
D.
E.
F.
G.
Trigonometry
Elements of Sections
Properties of Circles and Ellipses
Surface Areas and Volumes
Miscellaneous Formulas
Properties of Roof and Bottom Shapes
Columns for Cone Roof Framing - Flat
Bottom Storage Tanks
H. Conversion Factors
Specific Gravity and Weights of Various Liquids
A.P.1. and Baume Gravity and Weight Factors
Pressure Equivalents
Wire and Sheet Metal Gages
65
A-1
A-2
A-7
A-8
A-10
A-12
A-13
A-15
A-17
A-18
A-18
A-19
Appendix A. Trigonometry
TRIGONOMETRIC FORMULAS
Radiul AF
-1
TRIGONOMETRIC
FUNCTIONS
- aln l A + COil A - lin A cOlec A
- COl A lec A - tan A cot A
~/{a
H
"/~F
Sine A
COl A - c;c;s;cA
1
- COtA
-
Coaine A
_ ain A _ _1_. _ lin A cot A _" 1-1lnl A _ AC
,t an A lee A
Tangent A
_~_-1--linAaecA
COl A
- FO
cot A
COl A
Cotangent A - lin A -
1
iiriA -
-HG
COl A cOlee A
1
tan A
Secant A
COl A tan A - " 1-COI I A - BC
-AD
- 8i'n'A - CciI"A
cot A
- COl A -
COlecant A
1
-AG
i'i'nA
.~~~
RIGHT ANGLED
TRIANGLES
~
c
-
CI - b l
-
el
-
CI -
al
+ b2
al
b
a
Abe
l
al
Required
Known
A
b
a, b
tan A -
a, C
aln A-!.
C
•
B
I
a
~
a
tan B COl B
900-A
A, b
900-A
b tan A
A, e
900 -A
cain A
•
a
a cot A
1-
~
C
ab
ii"nA
b
COl A
K _ ~ (I - a) (1:- b) (I - c)
2
a l cot A
--2bltan A
--2CI lin 2 A
4
C COl A
a+b+c
2
T
.,,~
"ca=;;.
-..!.
C
OBLIQUE ANGLED
TRIANGLES"
Are.
""'ii'+'b'i
A, •
Abe
c
b
8 1 -
bl + cl
bl -
a l + c. - 2 ac COl B
cl
a l + bl
-
-
-
2 be COl A
2 ab COl C
- "._...
Required
Known
A
'A, b,e
tan
1
2' A
--I
B
C
1
tan "2 B.
-
tan
K
K
I-a
I-b
C
2' C-
Are.
" I (I-a) (I-b) (I-C)
K
.-=c
1SOO-(A+B)
a, A, B
a, b, A
b
1
alnB-~
a
a lin B
atin C
Iin'A
ai'ftA
btln C
lin B
.,b.C tan A .' a lin C
b-aeol C
" a l +b2-2ab COl C
A-1
ab aln C
--2-
N
l>
,
_J..
SQUARE
IJ
d
-
~
Axis of moments through center
RECTANGLE
Axis of moments on diagonal
11
c
cent.~
Axl, of moments on base
SQUARE
Axl, of moments through
SQUARE
= d2
=~
12
Vz
d2
=i
=
= bel
Z
r
S
"
= bell
"i
v'12
=~
II
12
!l!!!
= 2~
I '"
e
A
3
2c3
=
Z
v'12
r",i
IIVz
5 "'~
I
c
A
Vi
r =..L
3
5" ~
I" ~
3
c " d
A
"
z =~
d
=
.288675 d
3\12
'" ...!!!.
= .288675 d
'" .117851 dl
.707107 d
.577350 d
..Iff = .288875 d
=~
6
r"
5
I" ~
12
2
d2
c " If
A
.235702 dl
PROPERTIES OF GEOMETRIC SECTIONS
_J..
c
A"la of momenta through center
HOLLOW RECTANGLE
throu.h center of gravity
RECTANGLE
A... of mom.nta any line
11..1. of momenta on elleton.'
RECTANGLE
lUj
AJd. of mom.nta on .....
ftECTANGLE
Z
S
It
8
A
•
A
I
It
-
bel
-
.lnSiOd
2
+ d' COl'.)
+ d COl •
-
+dl
bldl'
.W'
b,eI,'
-4-
12A
~- .bldll
COl'.
+ d l cOla.)
+ d coe a)
12
bld l l
12
-----ed
bd l
bel' -
2"
d
bd- bid.
~ b l ain'.
bel (b l aln l •
I (b lin.
bd (b' a'n'.
12
b aln •
+dl)
bel
e (b l
bel
01
,01 b l + d l
bldl
bid'
I (b i .+ dl )
01 b l + d'
bel
.[f
d
bell
-,-
bel'
-,-
d
bel
PROPERTIES OF GEOMETRIC SECTIONS
3
en
::J
O·
r-t
n
en
en
0
en
-
r+
::J
en
m
en
CD
x·
en
:J
a.
l>
~
~
»
W
d,
1
i
_ _ _ _ _ _ _*..
I
!"2
t
!-
d,----~-t-
Y
t--+-------+·-"T<.::......
TRIANGLE
Alii, of momlnta on b...
AIlII 01 mom.nta through
center of gravity
TRIANGLE
c,
1 !i+--3:-J..!
I
"
1..
.. ~
Axil :!~:,.r::~~~!n;OUgh
b~ t
UNEQUAL RECTANGLES
b
LB
d
i
ll f
Axil of moment. through
center 01 gravity
EQUAL RECTANGLES
•
A
•
C
A
z
s
C
A
Z
S
A
b (d - dtl
-
-
eI.')
bty
I
~ ta)
Sa
-
CaI
+ ~ + bataYa
bat,-
Cd -
~.
II
_r:-
~'"
~.
..
~
2
;231102 II
-.4OI:MI II
YTi -
d
24"
bd'
""38*
bd'
T
2d
2
~
1-("-(~)]
_II
1"A
I
C
_
bt'
A
+ bat,
+ b, ta
~ bt'
bt
"4 lel 2
It
dl)
d' - d,s
1 12(d -
J
b (d' -;; d,l)
S
b(d';;d,,)
2
~
- ----r2 +
_
PROPERTIES OF GEOMETRIC SECTIONS
I
-1
..
_of _?j-l
through cent"
HOllOW CIRCLE
Axl. of moments
-- ~--
HALF CIRCLE
Axis of moments through
center of gravity
d
[6I
Axi. 01 moments
through center
CIRCLE
Axi, of moment, through
center of grnitv
TRAPEZOID
_
-: :
2" '"
d
,,:4 '" .049081d4
R
= .785l98R4
'" "': '" "R2 '" .785l98dZ '" 3.141593R2
IIlb + b,) V 2 1b2 + 4 bb, + b 121
d
dZlb2+4bb,+b,21
12(2b + b,)
3111b + b,)
cP 1b2 + 4 bb, + b,Z)
3Ib+b,)
dl2b fbI)
dlb + b,1
-2--
z
.,
I
~
+ d,2
_
S
(
1
-~
)
'"
Rl
2.
,. R
%
h
~.
Ih2 - 141
13,,' - 4)
---
%
d,.'
.515517R
1.570791R2
.2M338 R
'" .190681 R3
... (: ~)".,.,",
R
2
I
d,2
---.-
d
d4 -
.0490811d4 _ d,4)
.785398(d2 - d 12)
d,.) _.ota,75
32d
v dZ
-
d,.' 14
..1d4 -
..(d4
d
T
•
~-~
.- :: 2
A :: ~
z
S
A
R
r-+
ci
:J
n
0
:J
"0
16
»
~
~CO
d
_ "Rl _
_
S -_"CP
i2"-7-·098115d3-.785398R3
A
A
PROPERTIES OF GEOMETRIC SECTIONS
~
I
»
I
.1....
....
"TI
4
J--
..ARABOLIC "'ILLET IN
RIGHT ANGLE
I
COMPLEMENT OF HALF
PARABOLA
.-S---_---11~-1.
·~l
rJAP••
I
HALF PARABOl..A
I
..ARABOl..A
a ..
"
,4, .b'
I':••
a
-
-
-
A
m
It
-
-
It
•
I.
I,
n
m
-
-
I ..
A
-.!!..
.Ib
105
-
..
II
n
-
1.
tl
8
-./-;:
t
2YZ
t
...!....
ab a
10
2100
2100
11
it
~alb
4
.!.b
2....
10
1
I ·b
...!..
15 .b a
abl
...!!.
410
• • ab
17'5
fb
t
f·b
-T
-
-
l
Ia
I,
n
m
A
Ia
-
..!!..
175 a
I.
I,
2
fa ..
,a
-
m
A
tot
PROPERTIES OF GEOMETRIC SECTIONS
-,-'
-.,-no
"alb
16
1
16
1
+)
8 (1 - + )
(
_"ahl
= ab
'Z
.M
= b = R.
(T -~, - "(', --n)
H(:~»)
(-i--:')
(:6 - ~)
(:6 - ~)
_"alb
I
.hZ
alb
J,;""
4b
J,;""
4a
= 4~ "Ib
•
•~
~ ".hZ
.3b
J,;""
4a
= ..!.2 "ab
6 (1 -: )
" "'(2--~
3 16 -
A
I.
'3
lz
't
A
13
't
'2
A
• To obtain p,operti.. 01 ha" cI,cle. quarte, ei,el. and ci,eular complement substituta a
• ELLIPTIC COMPLEMENT
4
·--~----r-~-~3
4
rn~
I
• QUARTER ELLIPSE
"'
~-----L____LI_-L3
I
• HALF ELLIPSE
PROPERTIES OF GEOMETRIC SECTIONS
0:
r-+
0
::::s
()
-
to
0X
::::s
CD
»
-0
-0
0,
»
z-z la axl. of minimum
y
I
4
Tran.v.rse force oblique
through center of oravity
:.t
BEAMS AND CHANNELS
x
ANGLE
A.i, of moment. throuoh
center of ,ravit)'
=
K
+ cl
Zib
abcdt
~
lw ..
,.
I. cos29 +
Iv slnZ8 K lin29
.. sln2& + 'y cos28 + K lin 28
. , =(i tlb-XI.l+dxl-clx-tP)
'a
+ c)
Product of 1nertf8 about X-X lit y-y
21b
tlb + c). '" ~ Y ., d2 + at
48
12 + 82
,.
14
M
!.sI.... +.!-..
)
Iy
( I,.
I,. cos2. + Iy sln2a
...ln2. + 1y cosZ.
wh«e M I. banding moment due to forcs F.
..
,.
~
!1:r:.:..'='.:'Iv!"!':~::!"Z=::,:.t!'::'
~:
=
A
Iy-:-I,.
ZK
24
yUR
48
a2
AU2R,! + 821
Z4
= ~nR2Sin:z. =nR,Ztan.
AI6R2 - 821
!n82cot.
2 tan.
a
2 sin.
a
.. :(i tld-YI3+bY3-aIY-tI3)
,.
of sides
ZVR2 - R,2
= /6R2 -
=
tan Z&
" = '2
" =~
A
R,
R
180"
... xI. of momenta
through center
Number
REGULAR POLYGON
PROPERTIES OF GEOMETRIC SECTIONS
AND STRUCTURAL SHAPES
S
.a
3
= d [\.1 (110 +
hlo>
+
+
hi
(hi
h)
h,
+
h7
+ ~l + 2 (h2 +
hi
+ ~ + hll].
+ ~) + h2 + h) + h. + h~ + ~ + h1 + ha].
+
+ h2 + h3 + ~ + h, + ~ + h7 + h. + 11,].
+ 1.1
4 (hi
h lO)
+
Area
=
d [ \.1 (hi
+ 11,) + hz + h3 + h. + h, + h6 + h1 + hI].
When the ends arc nol curved. but are the straight lines hi and ~ then.
Area
Trapezoidal Rule:
Area = d [0.4
hlo
(110 +
=!! ["" +
Durand's Rule:
Area
Simpson's Rule:
When the ends are curved. ho and hlO are zero and cancel out of fonnulas.
The given figure has been divided into ten strips of width, d; the ordinates are ho to h lO .
Divide the plane surface into an even number of parallel strips of equal width .
IRREGULAR PLANE SURFACE
o
a::
::J
....
()
OJ
a..
X·
::J
Cl)
»
1:)
1:)
Appendix B. (Cont'd)
Thin Wall Sections (Dimensions are to Center of Wall)
A
= rrdt
I
= rrd 3 t
8
S = rrd 2 t
4
- -- t
r
= O.355d
b
=d
A = 4dt
d
3
I = 2d t
b
3
r
-
- -.
= 0.408d
d>b
-t
A = 2(b
-
~
d
r--
+ d)t
2
I 1-1 = d 6 t (3b + d)
b
SI_l
= d; (3b + d)
r
= O.289d ~~
... rJF+(T
I-I
Sector of thin
annulus
2
A = 2a.Rt
Il~j::
R·
(1 - Si~ a)
Y2 = R (-Si: a - cos a)
y1 = R
,
~
I
2
A-6
-.....J
l>
,
.r--
c- >-,
n
V
M
, '~
q
;'" ------1:,
.
'
w
v
q
u
t
me"
e
m
Pb
e
0, -A,
p n.
= area of circle-area of segment. m n p
~i\'ell in tahles
the quotient of
~:
C
h~'
the coenirimt
·.,'J'J
pu
Circular Lune, m p n s
Area = segment. m p n-segment. m s n.
v Q w).
se~ent. t
Circular Zone, t u w V
+ art'a of !:t'~ent .
= b x ex coeff. = U9 x :1.52 x 0,5.12 = 3.%56.
Area = area of cirde-(area of
Area
are obtained by interpolation .
Example-Gin"n: rise = 1.-19 and chord = 3.52.
.'
rb"",U9_
3.52 - 0 .... ~ .... ,. C ()(' fljalrnt
-- 0-"1')
. /J-_.
Intermediate coefficients for values of?
not .civen in tahl('S
C
~iv('n opposite
Given: rise. b. and chord. c.
Area = product of ril'C and chord. h x c. multiplied
Circular Segment, from Table II page 284
Coefficient by interpolation = 0 .371233.
Area = d 2 x coeff. = 25.9-1629 x 0.371233 = 9.6321.
are obtained by interpolation.
Example-Given : ric;e = 2; 16 and diameter = 5~y'!.
b
d =27 J6 +5~~ =0.178528.
Intermediate coefficients for values of ~ not
Given: rise. b. and diameter. d = 2r.
Area = square of diameter. d 2• multiplied by the coefficient d\'en
.
•
fb
oPPOsite the quotient 0 d '
Circular Segment, from Table I, pages 282 and 283
Area
Circular Segment, m q n, greater than half circle
2
Area = area of sector. m 0 n p-area of triangle. m 0 n
(IenRth of arc. m p n. x radius. r)-(radius. r.-rise. b)x chord . r
Circular Segment, m p n, less than half circle
in degrees.
= 0.0087266 x square of radius, rl. x angle of arc, m
Area = ~'l (length of arc, m p n )( radius, r)
_
f . 1 arc, n:' p n, in degrees
- area 0 ClrC e x
360
mBn
P
Circular Sector, m 0 n p
AREA OF CIRCULAR SECTIONS
o
ng
.
P
log = 0.9942997
b
= 0.2485749
v',2 - Ir + y - bl2
x
1
-;3
1.50211501
0 .0322515, log
= 2.5085500
0.1013212. log = 1.0057003
~
" = 3.14159265359.
= 0.4971499
110
"
=
57.2957795. log
= 1.7511226
0.0174533.1011 = 2.2418774
0.SM11H. log
= 1.7514251
- Are. of Segment nop
180
x rl
- A,e. of tri.ngle ncp
.Jf =
log
Jlo
x rZ x .,
x
llength of .rc nop x rl - x (, - bl
2
= A,e. of Circle
=
= chord b = rise
= A,e. of Sector ncpo
= 0.0017268
= Area of Circle
= rt Uength of arc nop
angle ncp in deg,e.s
.,
=
1.27324 side of square
0.78540 diamate, of circle
1.41421 slda of squa,e
0.70711 diameter of circle
, = ,adius of ci,cle
Area of Segment nsp
0.3183099. log
4
2raln2~ = ' +.,-~
b-r+~
Not,, : logs of f,actlons such a.1 :5028501 .nd 2.5085500 ma., .Iso be w,itten 9.5028501 - 10 .nd 1.501550 - 10,espectlvely.
1.7724539. log
,,2
~
2
= 2,sln~
, - ~v'4,2 - c2 = .!.tan~
2
4
2v'2br - b2
4b2 + c2
--I-b-
A,ea 0' Secto, ncpo
Are. of Segment nop
, = ,adlus of elrcle
= 0.017483 r A'
~ = 57.2957I a
180"
~
6.283111' = 3.14159 d
0.31831 clrcumfe,ence
3.14159,2
VALUES FOR FUNCTIONS nF 1T
= 31.0062767. log = 1.4914496 ~
= 9 .1169604-4.
v;- =
... 3
... 2
•
c
CIRCULAR SEGMENT
®
CIRCULAR SECTOR
Side of square in.."ibed in circle
~;~~~:~~:~j~l~e~~~~=~:;a:':~~~ua,e
Diameter of circle of equal pe'lphery as squa,e
b
Rise
., =
C
Cho,d
=
A' =
Radius,
Angle
A,c
Ci,eumf ..,ence
Oiamete,
A,ea
PROPERTIES OF THE CIRCLE
en
ct>
en
-6'
a..
m
::J
Q,)
en
ct>
(")
....,
()
o-+.
en
ct>
.-+
ct>
....,
"0
-0
....,
o
X
()
a..
::J
ct>
l>
"0
"0
Appendix D. Surface Areas and Volumes
SURFACES AND VOLUMES OF SOLIDS
CI RCULAR RI NG (TORUS)
D and R = Mean Diameter and Mean Radius, respectively,
of Ring
d and r = Mean Diameter and Mean Radius, respectively.
of Section
Surface = ,/!,2 Dd = 4,/!,2Rr
,/!,2
Volume = 2,/!,2Rr2 = "4 Dd 2
I
4·R?l
I
I
1 - - - - - - - - -1- - - - - - - - - - - - - - - - - - - - - - - - - - PRISMOID
End faces are in parallel planes.
Volume =
l
6 (A + A' + 4M), where
l = perpendicular distance between ends
A.A' = areas of ends
M = area of mid section, parallel to ends
UNGULAS FROM RIGHT CIRCULAR CYLINDER
I.
(As formed by cutting plane oblique to base)
Base, abc, less than semicircle;
Convex Surface
= h[2re- (d X length arc abc)] + (r-d)
= h [~eL-(d X area
Base, abc, = semicircle;
Convex Surface = 2rh
Volume
II.
Ill.
I
I
I
,,I
_L
Volume = J r 2h
Base, abc, greater than semicircle (figure);
Convex Surface
= h [2re + Cd X length arc abc)] + ~ + d)
Volume = h [~e3 + (d X area base abc) + (r + d)
Base, abc, = circle, oblique plane touching circumference.
Convex Surface = '/!'rh
Volume = Y2'/!'r2h
Base. abc. = circle, oblique pl~ne entirely above (figure)
Convex Surface = 2'/!'r
X Y2 (h, minimum + H, maximum)
Volume = '/!'r2 X Y2 (h, minimum + H, maximum)
J
,
~
base abe)] + (r - d)
IV.
V.
ANY SOLID OF REVOLUTION
Let abcd represent the generating section about axis A·A of
solid abef.
Let g at distance h from A-A be the center of gravity of abed.
Let aO be the angular amount of generating revolution.
Then
Total Surface of solid abef
= (2'/!'ha + 360) X perimeter abed
Volume of solid abef = (2'/!'ha + 360) X area abed
For complete revolution (2'/!'ha + 360) = 2'/!'h
A-a
I
»
(0
$
,.
,
t'
I
L
~~--+--->i
1<---"11---->:
I
{g
5
I
t\
i_
Ii
1f ~d~ ---r
~t' /~-----~~
I
tiI
I
I
-----~-
r«---d--->1
I
I
tli
:f_
--!-
(i
I
,5
-f'
I
I
1
, --- -- y-
S
,
:
,
a
,
I
A.
I
----J,.-
~L
I
t)
r
@
_'L
I
I
h
U
Ii<-d-->lr
1I'd'
2
CYLINDER
~.
above base
+ Base Area
Surface = Sum of surfaces of bounding planes
wh
Volume ~ ""6 (I + m + n)
WEDGE
+
Convex = !~ (d + d') = .~ (d + d') "4h' + (d=<f')1
Surface 2
11'5
4
r
Total Surface = 2 (d + d') + 4" (d! + d'!)
Volume = ~h (dt + dd' + d'2)
12 .
h(d! 2dd' + 3d'!)
Center of GraVlty above base "" 4 Cdt + dd' + d;i)-
FRUSTUM OF CONE
Total Surface = Convex Surface + ·4Volume = ~ d 2h = .~ d 2 "4s~
12
24
h
Center of Gravity above base = "4.
Convex Surface =
CONE
~2 ds = ~
"ar:t4tii
4
yd!
iii!)
Lateral Surface = s (Top + Base Perimeters) + 2
If a = top area and A = base area,
Total Surface = Lateral Surface + (a + A)
Volume = h (a + A + viA) +3
Center of Gravity = h (~~_-t-_A + 2
above base
4
a + A + "aA
FRUSTUM OF PYRAMID
Center of Gravity =
Volume = 3" X Base Area
h
Total Surface = Lateral Surface
Lateral Surface = ~ X Base Perimeter
PYRAMID
Lateral Surface = h X Base Perimeter
Total Surface = Lateral Surface + (2 X Base Area)
Volume = h X Base Area
Center of Gravity above Base - ~
PRISM
Volume Cylinder. right or oblique = area of section at right angles
to sides X length of side.
b
Center of Gravity above Base -
4
Total Surrace = rdh + '"2
Volume = .11' d'h
Convex Surface = lI'dh
SURFACES AND VOLUMES OF SOLIDS
t
I
II
____ '
~- - -
I
,
I
C- - -->1
, r'
I
,
~--
...
~
G[
__--'_~___ :1_
I
I
_td ______ i_
---1X
':d
Ii
_-t_
~----D----->{
-+-1---
~----c----->t
.--r /
Q
~--eL-->i ---,r
...-'....... ~,'f'
L=SJ[
I
'J!/
.,;.,
~
:
::L
----:-S
1<-----<:----+1
I
I
I
h :-
l+---d---;:.l
:G
/2
)
4
3" Rr'
+. R (!lin·Ie)]
-e-
Sin-'e=Angle. in radians.
whose sine ... e
Wheree=
R ·-
"Rt - -if
4h,>~~-r']
Total Surface - Convex Surface + rrl
,..r'h
.
h
Volume - T
Center of GraVlty = 3 above bage
Convex Surface- ;~2[ (rl +
PARABOLOID
Use common or base 10. log.
4
Volume-311'R 1r
2.303r2
+e)]
Surface = 11' [ 2R' + - -e- Iog. 1~
(1
ELLIPSOID (II. Revolution about conjugate axis)
Volume -
Surface - 211'r [ r
ELLIPSOID (I. Revolution about transverse axis)
Total Surface ... 2yrh + (c 2 + C
lI'h
Volume = 24 (Jet + 3c'1 + 4h2)
i
Convex Surface = 2rrh
SPHERICAL ZONE
Spherical Surface=2rrh=r(c2 +4h 2 ) + 4
Total Surface = Spherical Surface + (rc 2 + 4)
Volume = ,.-h 2(3r - h)+ 3= ,..h(3c 2 + -lh2) + 2.1
Center of gravity above base of segment = h (4r- h) +4(3r- h)
SPHERICAL SEGMENT
h)
Center of Gravity
_ ~(r
above center of sphere - , - 2
Volum'C"= ~ 1I'r2h= 1rr2( (r- ~r'L..~2)
Total Surface = i (4h+c)
lI'r
SPHERICAL SECTOR
Surface = rd 2 = 4rr2
rd J 4
Volume = Ir = j 1I'r'
Side of an equal cube = diameter of sphere X 0.806
Length of an equal cylinder = diameter of sphere X 0.6667
Center of Gravity of Half Sphere = ~r above spherical center
SPHERE
SURFACES AND VOLUMES OF SOLIDS
l>
a:
::J
......
(')
o
o
X
a.
::J
CD
"0
"0
Appendix E.
M·ISCELLANEOIJS FORIUULAS
7. Heads for Horizontal Cylindrical Tanks:
1. Area of Roofs.
UmbrelJa Roofs:
ciiamf"trr or tank in feet.
o=
Hemi·ellipsoidal /leads have an ellipsoidal rross section, usually
with minor axis equal to one half the major axis-that is. depth
1,4 D, or more.
=
=0.842
D' (when radius = diameter)
0.882 D' (when radius = 0.8 diameter)
Surface area . in 1. {
square feet
f
=
Conical Roof.:
Surface area in} {
square feet
=
0.787 D' (when pitch is % in 12)
= 0.792
D' (when pitch is Ilh in 12)
2. Average weights.
-490 pounds per cubic foot-specific gra\'ity 7.85
Steel
Wrought iron -485 pounds per cubic fOOl-specific gravity 7.7i
-450 pounds per cubic foot-specific gravity 7.21
Cut iron
1 cubic foot air or gu at 32- F., 760 m.m. barometer
cular weight x 0.0027855 pounds.
3. Expansion in steel pipe
feet per
}OO
= mole·
=
0.78 inch per 100 lineal
degrees Fahrenheit chan~e in temperature
Dished or Basket Heads consist of a spherical segment nor·
mally dished to a radius equal to the inside diameter' of the
tank cylinder (or within a range of 6 inches plus or minus)
and connected to. the straight cylindrical flange by a "knuckle"
whose inside radius is usually not less than 6 per cent of the
inside diatneter of the cylinder nor less than 3 times the thick·
ness of the head plale. Basket heads closely approximate hemi·
ellipsoidal heads.
Dumped Heads consilit of a spherical segment joining the
tank cylinder directlY without the transition "knuckle." The
radius = D. or less. This type or head is used only for pressures
of 10 pounds per square inch or less, ex{'eptin~ where a com·
pression ring is placed at the junction of head and shell.
Surlace Area 0111 eads:
(7a) Hemi.ellipsoidal Heads:
= 0.412 inch per mile per de~ree Fahrenheit tempera·
S = 'Ii' R' [l + KI(2-K))
S = surface area in square feet
ture chan~e.
R
K
4. Linear coefficients of expansion per degree increase
in temperature:
Per Degree
Fahrenheit
STRUCTURAL STEEL-A-7
70 to 200 ° F .............. 0.0000065
Per Degree
Centigrade
0
21.1 0 to 93°C ............. .
0.0000117
STAINLESS STEEL-TYPE 304
32 ° to 932 OF ...•........... 0.0000099
0° to 500°C .............. .
0.0000178
ALUMINUM
-76° to 68°F .............. 0.0000128
-60° to 20°C ............. .
T= 6PD
=
S
working preuure in pounds per square inch
= diameter of cylinder in feet
S = allowable unit working stress in pounds per square inch
=
(7d Bumped Heads:
5 = .. Rr (1
K')
S, R, and K as in formula (7a)
+
0/ Head$:
(7d) Hemi-ellipsoidal Heads:
R
K
= radius of cylinder in feet
= ratio of the
depth of the head (not including the
Onnj:e) to the ' radius of the cylinder
~lraight
(7e) Dished or Basket Heads:
Formula (7d) gives volume within practical limits.
(70 Bumped Heads:
D
T
(7b) Dished or Basket Heads:
Formula (7a) gives surface area within practical limits.
\' = %,.. K R"
5. To determine the net thickness of shells for horizontal
cylindrical pressure tanks:
P
ratio of the depth o( the head I not including the
straight fIanj:e) to the radius of the cylinder
The above formula isnol exact but is within limits of
practical accuracy_
Yolume
0.0000231
= radius of cylinder in feet
=
V = Y2 .. K RI (1 + % K'l
V, K and R as in formula (7dl
Net thickness in inches
Resulting net thickness must be corrected to gross or actual
thickness uy dh'iding by joint efficiency.
6. To determine the net thickness of heads for cylindrical
pressure tanks:
'
(6a) Ellipsoidal or Bumped Heads:
Note: K in aLove formulas may ue determined as follows:
Hemi·ellipsoidal heads-K is known
Dished Heads-K
MR
mR
R
= radius of knuckle in feet
= radius of cylinder in feet
MR
.\1 - I f
S
For IlIlmpf>d hf'ao".
T, P and" D as in formula 5
2m)
= principal radius of head in feet
-
T= 6PD
= M- V (M-l) (M + 1 = [M- V W-IJ
Bumped Heads- K
_ mR
m-lf
m = 0
(6b) Dished,or Basket Heads:
T = 1O.6P(MR)
8. Total Volume of a Sphere:
s
T, S lind P as in formula 5
MR
= principal radiuo:; of head in feet
Resulting net thickness of heads i~ both net and gross thick.
nen if one piece seamless heads are used, otherwise net thick·
ness must be corrected to Jrro'lS thickness as above.
Formula~ 5 and {, mu!"t often he modified to comply with
various en~ineerin~ codes, and state and municipal reftUlalions.
Calculated ~O8!l plate thickneuet are sometime. arbitrarily
increased to provide an additional anowance (or corrosion.'
A-10
V = total volume
D = diameter of sphere in feet
V = - 0.523599 D3 Cubic Feet
V = -0.093257 D3 Barrels of 42 U.S. Gallons
Number of barrels of 42 U.S. Gallons at any inch in a true sphere
(3d-2h) h2 X .0000539681 where d is diameter of sphere and h is
depth of liquid both in inches.
The desired volume must include appropriate ullage for the stored
liquid.
=
Appendix E. (Cont'd)
MISCELLANEOUS FORMULAS
(CONTINUED)
9. Total volume or length of shell in cylindrical tank with ellipsiodal or hemispherical heads:
V
Total volume
L
Length of cylindrical
shell
KD
Depth of head
V
= '7iD2 (L +
L
=
4
(V
1'/3 KD
-
10. Volume or contents of partially filled horizontal cylindrical
tanks:
(lOa) Tank cylinder or shell (straight portion only)
R2L[(;8~O)
Q
- sin
Note: To obtain the volume or quantity of liquid in partially filled tanks, add
the volume per formula (lOa) for the cylinder or straight portion to twice
(for 2 heads) the volume per formula (lOb), (I0e) or (lOd) for the type of
head concerned.
11. Volume or contents of partially fined herni-ellipsoidal heads
with major axis vertical:
e cos e ]
Q
partially filled volume or
contents in cubic feet
R
radius of cylinder in feet
L
length of straight portion of cylinder in feet
Q
v
R
The straight portion or flange of the heads must be considered a part of
the cylinder. The length of flange depends upon the diameter of tank
and thickness of head but ranges usually between 2 and 4 inches.
a
A
~
Cos
e
=
=
~
a ratio
1 - ~. or
Q
R-a
R
= degrees
partially filled volume or
contents in cubic feet
V
total volume of one head
per formula (7d)
a
R=
~
R
radius of cylinder in feet
1Y2 V A (l - Y.l
a
~2)
.
KR =
a
~ KR = depth
of liquid in feet
a ratio
"<
'"><
'"
>0:
(lIb) Lower Head:
.
a ratio
a
Radius of cylinder
~
(lOb) Hemi-ellipsoidal Heads:
Q
3;4 V ~2 (l - 1f3~)
Q
Total volume of one
head per formula
(7d)
01a) Upper Head:
.
R=
e =
= Partially filled volume
or contents in cubic
feet
in feet
R = depth of liquid in feet
a
Dished or Basket Heads:
Formula (1 Ob) gives partially filled volume within practical
limits, and formula (7d) gives V within practical limits.
OOd) Bumped Heads:
Formula (lOb) gives partially filled volume within practical
limits, and formula (7f) gives V.
1'/3 KD)
7i~2)
(l0e)
R = depth of liquid in feet
A-11
Q
1'h V A2 (1 -
A
a
1m
a
~ KR = depth
of liquid in feet
= a ratio
Y.l~)
.....a.
N
I
»
1.3
0+~)
or
--4-
3p O
+ 4.5pO
~;.60 (~ +f)
+1.950
0.20830
90 0
o
90 0
Belt line Stres s
(pound s)
W
NOTE: All dimensions expressed in feet; H
Angle at edge
o
trX\~ -3
0+~)
0+~)
o
90 0
(0 2
4X2)
"X\:4 - T
+ 6p O
-6 p O or
-2.60
+2.60
0.15630
0.14390
h
I
2
6p r
2.6r (H + h)
12r - 4h
8rh - 3h
5
±gh (roughly)
calculate
sector - V
calculate angle
2"rh
calculate
h
0.0796WO
Height).
load.
colculafe
O.3183W~r2 -~
o
calculate new
calculate
vol. on basis
vol. V - vol.V (h _ x) & subtract
~
h
2.6 H Do
3h
-.-
2h
T
Dh
-2-
=water elev. above belt line (Shell
=total load carried, including dead
)
X2)1,trX\T
l02 _ 3X 2
T
+f) 0
(0 2
3p O
(H
0.31250
Partial Volume
within depth X
(cu. ft.)
Stress due to
Gas pressure
"p" Ibs per
Inch
Stress (water)
Ibs. per inch
of Mass
V to Centroid
Prol. Ar.
0.19190
0.19640 2
0.26180 2
0.39270 2
Projected Area
0.28780
1.2110
1.3220
1.57080
Length of Arc
V to Centroid
"Do
-2-
1.0840 2
1.240'
1.5710'
Surface, sq. ft.
.
30 0
O.276W
0.04510
0.0560
38.67 0
0.198W
0.05960
0.07550
('.11950 2
1.0800
1.04720
0.09060 2
0.88220 2
0.53670'
0.071750'
0.17550
,
T
0.84180 2
0.40310 '
1.95840'h
0.97920'
1.30560'
1.95840'
Volume, gals.
7.833h 2 (3r-h)
0.1340
r -0
0.05390'
h
1.0472h 2(3r"':h)
•
0.26180 2 h
0.17450'
0.13090'
.
STD. UMBRELLA SHAPES
~y ~y
I,
h
r
0
~~T~
H
h
0.26180'
o
"4
Volume, cu.ft.
o
3"
o
2"
Depth or RI Ie
~~~~Yr\xrl
r ~E~~l r¢j~x ~~I~.
SEGMENTAL
Appendix F. Properties of Roof and Bottom Shapes
90 0
o
0.45430
0.44640 2
1.66610'
90 0
o
0.66020
0.56390 2
1.96350·
2.44810'
2.07720 1
o
0.32720'
f·
0.27770'
0.7070
~
,
90 0
o
0.10000
0.12550 2
1.10430
0.92860 2
0.60590'
0.08100 J
0.1690
O.R.=O
K.R. = .060
~~m
0
90° CONISPH. 60° CQNISPH F & 0 HEAD
, Appendix G. Columns for Cone Roof Framing - Flat Bottom' Storage Tanks
Pipe Columns
Column Length and
Allowable Load
Pipe
Dia
Sch
Thickness
lIr
Max
Length
40
.280
20
.250
40
.322
20
.250
40
.365
20
.250
40
.375
10
.250
180
175
180
175
180
175
180
175
180
175
180
175
180
175
180
175
33/-8
32/-9
44/-3
43/-3
44/-2
42/-10
55/-8
54/-1
55/-0
53/-6
66/-4
64/-6
65/-9
64/-0
83/-6
81/-4
6
8
10
12
16
A WWA DIOO-84 Column Formulas
p
=[
1
18 000
+
L2
Max Load
@
lIr
kips
36.8
37.6
43.3
44.4
55.3
56.6
54.3
55.5
78.5
80.2
64.6
66.1
96.0
98.0
81.4
83.2
Weight Area
Ih/ft sq. in.
I
in.4
S
r
in. 3
in.
19.0
5.58
28.1
8.5
2.25
22.4
6.58
57.7
13.4
2.96
28.6
8.40
72.5
16.8
2:94
28.0
8.25
113.7
21.2
3.71
40.5
11.91
160.8
29.9
3.67
33.4
9.82
191.9
30.1
4.42
49.6
14.58
279
43.8
4.38
42.1
12.37
384
48.0
5.57
Maximum permissible slenderness ratios Llr shall be
175 for columns carrying roof loads only. ,'
The maximum permissible compressive stress for
tubular columns and struts shall be determined by the
formula
The maximum permissible unit stress for structural columns shall be determined by the formula
A '
Properties
1
= Xy
P
A
18000r2
in which X is the smaller of
or 15,000 psi, whichever is less.
Where:
P = the total axial load, in pounds.
A = the cross-sectional area, in square inches.
L = the effective length of the column, in inches.
, = the least radius of gyration, in inches.
18000
L2
+--18 000,2
or 15 000 psi and
for values of tlR less than 0.015, and unity (1.00) for
values of tlR equal to or exceeding 0.015.
Where:
P = the total axial load, in pounds.
A = the cross-sectional area, in square inches.
L = the effective length, in inches.
, = the least radius of gyration, in inches.
R = the radius of the tubular member to the
exterior surface, in inches.
t = the thickness of the tubular member, in
inches (minimum allowable thickness is IA in.).
A-13
API Standard 650
The maximum allowable compression shall not exceed
the following limits:
For columns on cross-sectional area, when Llr $
120 (See Note 1),
Crna = [ 1 When 120
< Llr $
Crna
=
2
(Llr)
34,700
]
(
33,000Y )
FS
131.7 (see Note 2),
(Llr) 2
34,700
33,OOOY )
FS
------~~~~~--~--~
1.6 - (L;200r)
[
1 _
]
(
When Llr> 131.7
crna
=
where:
Crna = maximum allowable compression , in pounds per
square inch.
L
= unbraced length of column, in inches.
r
= least radius of gyration of column, in inches.
Y
= 1.0 for structural or tubular sections having tlR
values greater than or equal to 0.015
149,000,000Y
(Llr)2[1.6 - (L;200r)]
Note 1: The allowable stresses, not including Y, are
tabulated in AISC S 310-311. Specifications for the
Design, Fabrication, and Erection of Structural Steel for
Buildings (1969), Table 1-33, column headed "Main and
Secondary Members."
Note 2: The allowable stresses, not including Y, are
tabulated in AISC S 310-11, Table 1-33, column headed
, 'Secondary Members."
[
2~ (
;
)] [ 2 _
2~0 (
;)]
for tubular sections having t/R values less than
0.015.
= thickness of the tubular section, in inches, less any
specified corrosion allowance. (The minimum
thickness, including any currosion allowance on
the exposed side or sides ., shall not be less than 114
inch for main compression members or %6 inch
for bracing or other secondary members.)
R = outside radius of tubular section, in inches.
FS = safety factor
= ~ + Llr _ _ -l,;;(L;;..;.I:..t.r)_3_
3
350
18,300,000
For main compression members, Llr shall not exceed 180.
A-t4
(]1
~
I
»
K
mol
cd
A
Symbol
m
kg
s
SUPPLEMENTARY UNITS
Quantity
Unit
Symbol
plane angle radian
rad
solid angle steradian sr
joule
watt
Unit
newton
pascal
N/m2
N·m
J/s
J
W
kg·m/s 2
Formula
Symbol
N
Pa
10 18
10 15
10 12
109
106
103
102
10 1
10- 1
10- 2
10- 3
10- 6
10- 9
10- 12
10- 15
10- 18
Prefix
exa
peta
tera
giga
mega
kilo
hecto b
deka b
decib
centib
milli
micro
nano
pico
femto
atto
E380-79 for more complete information on 51.
Use is not recommended.
1 000 000 000 000 000 000
1 000 000 000 000 000
1 000 000 000 000
1 000000000
1000000
1000
100
10
0.1
0.01
0.001
0.000001
0.000 000 001
0.000000000001
0.000 000 000 000 001
0.000 000000 000 000 001
SI PREFIXES
Multiplication Factor
Quantity
area
volume
velocity
acceleration
specific volume
density
f
a
P
n
~
da
d
c
m
h
k
M
T
G
P
E
Symbol
DERIVED UNITS (WITHOUT SPECIAL NAMES)
Formula
Unit
m2
square metre
m3
cubic metre
m/5
metre per second
m/5 2
metre per second squared
m 3 /kg
cubic metre per kilogram
kg/m 3
kilogram per cubic metre
force
pressure, stress
energy, work,
quantity of heat
power
Quantity
a Refer to A5TM
b
Unit
metre
kilogram
second
ampere
kelvin
mole
candela
DERIVED UNITS (WITH SPECIAL NAMES)
length
mass
time
electric current
thermodynamic temperature
amount of substance
luminous intensity
BASE UNITS
Quantity
(Metric practice)
WEIGHTS AND MEASURES
International System of Units (SI)a
=
=
=
=
Square feet
.006944
1.0
9.0
272.25
43560.0
=
=
=
=
=
=
Feet
.08333
1.0
3.0
16.5
660.0
5280.0
=
=
=
=
=
Gills
Pints
1.0 = .25
4.0 = 1.0
8.0 = 2.0
32.0 = 8.0
=
Pints
Quarts
1.0
.5
2.0
1.0
8.0
16.0
51.42627
25.71314
64.0
= 32.0
4.0
Quarts
.125
.5
1.0
4.0
=
=
=
Acres
=
Bushels
.01563
.03125
.25
.80354
1.0
Cubic
Cubic
Feet
.01945
.03891
.31112
1.0
1.2445 ,
=
=
.000207
.00625
1.0
640.0
Gallons
Feet
.03125 = .00418
.125
.01671
.250
.03342
1.0
.1337
7.48052 = 1.0
U.S.
LIQUID MEASURE
=
Pecks
.0625
.125
1.0
3.21414
DRY MEASURE
=
SQUARE AND LAND MEASURE
Square Yards
Sq. Rods
.000772
.111111
1.0
.03306
30.25
1.0
160.0
4840.0
3097600.0
102400.0
=
=
.0000098
.0015625
1.0
Sq. Miles
LINEAR MEASURE
Furlongs
Miles
Rods
Yards
.00012626 = .00001578
.02778 =
.0050505
.00151515
.00018939
.0606061
.33333
.1818182 = .00454545 = .00056818
1.0
1.0
5.5
.025
.003125
1.0
.125
220.0
40.0
1760.0
= 320.0
8.0
= 1.0
AVOIRDUPOIS WEIGHTS
Grains
Drams
Pounds
Tons
Ounces
1.0
.03657
.002286
.000143 = .0000000714
27.34375 =
1.0
.0625
.00000195
.003906
437.5
1.0
.0625
.00003125
16.0
16.0
1.0
.0005
7000.0
256.0
14000000.0
512000.0
32000.0
2000.0
1.0
SQ. Inches
1.0
144.0
1296.0
39204.0
Inches
1.0
12.0
36.0
198.0
7920.0
63360.0
WEIGHTS AND MEASURES
United States System
en
o-,
.-+
n
Q)
11
:J
o·
en
Cb
-,
<
:J
o
()
:r:
X
0..
:J
(1)
»
"0
"0
m
~
I
»
Quantity
Multiply
by
a
inch
foot
yard
mile
2.204622
1.102 311 x 10- 3
kilogram
ounce
(avoirdupois)
pound
(avoirdupois)
short ton
35.273966 x 10-3
gram
cubic inch
cubic foot
cubic yard
gallon (U.S.
liquid)
quart (U.S.
liquid)
gram
kilogram
kilogram
kilogram
in2
ft2
yd 2
mi2
m2
m2
m2
km2
mm 2
yd
mi
ft
in
mm
m
m
km
Ib av
oz av
9
kg
kg
qt
in3
ft3
yd 3
gal
cubic miRimetre mm3
cubic metre
m3
cubic metre
m3
litre
I
I
litre
square
square
square
square
acre
acre
square
millimetre
square metre
squ.are metre
square
kilometre
square metre
hectare
inch
foot
yard
mile
28.34952
0.453592
0.907 185 x 103
1.056688
61.023759 x 10-6
35.314662
1.307951
0.264172
b16.387 06 x 103
28.31685 x 10-3
0.764555
3.785412
0.946353
1.550003 x 10-3
10.763910
1.195990
0.386101
0.247 104 x 10-3
2.471044
4.046873 x
0.404687
103
x 103
to obtain
millimetre
metre
metre
kilometre
ounce (avoirdupois)
pound (avoirdupois)
short ton
litre
cubic-millimetre
cubic metre
cubic. metre
litre
cubic inch
cubic foot
cubic yard
gallon (U.S. liquid)
quart (U.S. liquid)
square millimetre
square metre
square metre
square kilometre
square metre
hectare
b 0.092903
square foot
square yard
square mile
(U.S. Statute)
acre
acre
0.836127
2.589998
b 0.645160
39.370079 x 10-3
3.280840
1.093613
0.621370
1.609347
b25.400
b 0.304800
b 0.914400
square inch
millimetre
metre
metre
kilometre
inch
foot
yard
mile (U.S. Statute)
Refer to ASTM E380-79 for more complete information on SI.
b Indicates exact value.
Mass
Volume
Area
Length
SI C'ONVERSION FACTORSa
b
0.238846
0.277 778 x 10-6
joule
joule
t"C = (tOF x 32)/1 .8
t~ = 1.8 x to C +
32
b
a
kW
W
W
kW.h
Btu
ft.lbf
J
J
J
J
degree Celsuis
degree
Fahrenheit
radian
degree
rad
ft.lbfls
foot-poundforce/second
eBritish thermal Btu/h
unit per hour
horsepower
hp
(550 ft .• lbl/s)
Refer to ASTM E380-79 for more complete information on SI.
Indicates exact value.
e International Table
degree Fahrenheit
degree Celsius
Temperature
17.45329 x 10.3
57.295788
1.341022
kilowatt
ree
ddl
ra Ian
3.412141
0.737562
kilowatt
0.745700
watt
foot-poundforce
eBritish termal
unit
ecalorie
kilowatt hour
joule
joule
joule
joule
watt
watt
watt
kPa
kPa
kPa
Ibf.ft
Ibf.in
Ibflin2
pound-force
per square
Inch
foot of water
(39.2 F)
inch of mercury
(32 F)
kilopascal
kilopascal
0.293071
1.355818
0.947817 x 10-3
joule
foot-pound-force/
second
eBritish thermal unit per
hour
horsepower (550 ft.
Ibfls)
0.737562
joule
b
0.295301
kilopascal
1.355818
1.055056 x 103
4.186800
3.600 000 x 106
0.334562
kilopascal
foot-pound-force
eBritish thermal unit
ecalorie
kilowatt hour
0.145038
2.98898
3.38638
6.894757
kilopascal
pound-force per
square inch
foot of water (39.2 F)
inch of mercury (32 F)
kilopascal
pound-forceinch
pound-forcefoot
0.737562
8.850748
newton-metre
newton-metre
N.m
N.m
Ibf
newton-metre
newton-metre
ounce-force
pound-force
0.112985
1.355818
3.596942
0.224809
newton
newton
N
N
newton
newton
to obtain
pound-force-inch
pound-force-foot
0.278014
4.448222
by
ounce-force
pound-force
Multiply
Angle
Power
Energy,
Work,
Heat
Pressure,
Stress
Bending
Moment
Force
Quantity
SI CONVERSION FACTORSa
a:
.-+
:J
o
(")
I
·x
0..
:J
Cl)
»
'0
'0
Appendix H. (Cont'd)
SPECIFIC GRAVITY AND WEIGHTS OF
VARIOUS LIQUIDS
Liquid
Acetaldehyde
Acetic Acid
Acetic Anhydride
Acetone
Aniline
Asphaltum
Bromine
Carbon DisulfIde
Carbon Tetrachloride
Castor Oil
Caustic Soda, 66% Solution
Chloroform
Citric Acid
Cocoanut Oil
Colza Oil (Rape Seed Oil)
Corn Oil
Cottonseed Oil
Creosote
Dimethyl Aniline
Ether
Ethyl Acetate
Ethyl Chloride
Ethyl Ether
FOr"maldehyde
HI Fuel Oil
1/2 Fuel Oil
1/4 Fuel Oil
1/5 Fuel Oil
1/6 Fuel Oil
Furfural
Gasoline (Motor Fuel)
Glucose
Glycerin
Hydrochloric Acid, 43.4% Sol.
Kerosene
Lal~tic Acid
Lard Oil
Linseed Oil-Raw
Linseed Oil-Boiled
Mercury
Molasses
Naphthalene
Neallfoot Oil
Nitric Acid. 91 % Solution
Olive Oil
Peanut Oil
Phenol
Pitch
Rosin Oil
Soy Bean Oil
Sperm Oil
Sulfer Dioxide
Sulfuric Acid. 87% Solution
Tar
Tetrachloroethane
Trichloroethylene
Tung Oil
Turpentine
Water (Sea)
Water (0 0 C)
Water (20 0 C)
Whale Oil
At Tei!'
of 0
7f,ecific
Weight in
Lbs. per
ral:lly
u.s. Cal.
Weight in
Lbs. ~er
Cu. t.
64.4
68.0
68.0
68.0
68.0
68.0
68.0
68.0
68.0
59.0
68.0
68.0
68.0
59.0
68.0
59.0
60.8
59.0
68.0
77.0
68.0
42.8
77.0
68.0
60.0
60.0
60.0
60.0
60.0
68.0
60.0
77.0
32.0
60 . 0
68.0
59.0
59.0
68.0
59.0
68.0
68.0
68.0
59.0
68.0
59.0
59.0
77.0
68.0
68.0
59.0
59.0
80.0
0.783
1.049
1.083
0.792
1.022
1.1-1.5
3.119
1.263
1.595
0.969
1.70
1.489
1.542
0.926
0.915
0.921-0.928
0.926
1.040-1.100
0.956
0.708
0.901
0.917
0.712-0.714
1.139
0.80-0.85
0.81-0.91
0.84-1.00
0.91-1.06
0.92-1.08
1.159
0.70-0.76
1.544
1.260
1.213
0.82
1.249
0.913-{).915
0.93
0:942
13.595
1.47
1.145
0.913-0.918
1.502
0.915-0.920
0.917-0.926
1.071
1.07-1.15
0.98
0.924-0.927
0.878-0.884
1.363
1.834
1.2
1.596
1.464
0.939-0.949
0.87
1.025
1.00
0.998
0.917-0.924
6.52
8.74
9.0:
6.60
8.51
9.2-1i5
25.98
10.52
13.28
8.07
14.16
12.40
12.84
7.71
7.62
7.67-7.73
7.71
8.66-9.2
7.96
5.90
7.50
7.64
5.93-5.95
9.49
6.7-7.1
6.7-7.6
7.0-8.3
7.6-8.8
7.7-9.0
9.65
5.8-6.3
12.86
10.49
10.10
6.83
10.40
7.60-7.62
7.8
7.84
113.23
12.2
9.54
7.60-7.65
12.51
7.62-7.66
7.64-7.71
8.92
8.91-9.58
8.61
7.70-7.72
7.31-7.36
11.35
15.27
10.0
13.29
12.19
7.82-7.90
7.25
8.54
8.34
8.32
7.64-7.70
49
65
68
49
64
69-94
195
79
100
60
106
93
96
58 .
57
57-58
58
65-69
60
44
56
57
44-45
64.4
68.0
68.0
68.0
59.0
68.0
59.0
39.2
68.0
59.0
A-17
71
50-53
51-57
52-62
57-66
57-67
72
44-47
96
79
76
51
78
57
58
59
849
92
71
57
9.4
57
57
73
67-72
61
58
55
85
114
75
100
91
59
54
64
62.4
62.3
57
The parameters given are
approximate for estimating purposes
only. The properties of the stored
liquid should be determined
analytically and used in the final
design.
Appendix H. (Cont/d)
A.P.I. AND BAUME GRAVITY AND WEIGHT FACTORS
The relation of Degrees Baume or A.P.I. to Specific Gravity is expressed by
the following formuJas:
For liquids lighter than willer:
Degrees Baume
= 140 - 130,
G
Degrees A.P.I.
=~ G
131.5,
For liquids heavier tluJn water:
Degrees Baume = 145 _ 145,
G
=
= ~::-:--:::-_140_-:::-_-:130 + Degrees Baume
G = -===:-:-~1~4_1._5~-:::-':""
131.5 + Degrees A.P.I.
Formulas are based on the weight of 1 gallon (U.S.) of oil with a volume of
231 cubic inches at 60 degrees Fahrenheit in air at 760 m.m. pressure and 50 %
humidity. Assumed weight of 1 gallon of water at 60° Fahrenheit in air is
8.32828 pounds.
G
G
To determine the resulting gravity by mixing oils of different gravities:
D
= md.m++ndn
= Density or Specific Gravity of mixture
Proportion of oil of d density
= Proportion of oil of d density
= Specific Gravity of moil
='Specific Gravity of n oil
D
m~
n
d1
d2
=...."....,.,,,...-..,,,,-._14_5-,,,...--..,.
145 - Degrees Baume
=
G
Specific Gravity
ratio of the weight of a given volume of oil at 60°
Fabrehelt to the weight of the same volume of water at 6()0 Fahrenheit.
l
1
PRESSURE EQUIVALENTS
PRESSURE
lib. per sq. in.
= 2.31 ft. water at 60°F
= 2.04 in. hg at 60 F
= 0.433 lb. per sq. in.
= 0.884 in. hg at 60 F
= 0.49 lb. per sq. in.
= 1.13 ft. water at ~F
= lb. per sq. in. gauge (psig) + 14.7
0
1 ft. water at 600f
D
1 in. Hg at 6()OF
lb. per sq. in.
Absolute (psia)
l
A-18
Appendix H. (Cont'd)
WIRE AND SHEET METAL GAGES
Equivalent thickness in decimals of an inch
GaOl
No.
7/0
610
510
4/0
310
2)0
1/0
,
2
I·
3
4
5
6
7
8
9
10
l'
12
u.s. SUncWd
GalvaniUd
GaOl tor
Uncoated
Sheet Gaoe
lor Hot-Dlpped
Hot & Cold
Zinc Coated
Rolled Sheets'
Sheets'
-
---
.2391
.2242
.2092
.1943
.1793
.1644
.1495
.1345
,1196
,1046
-
' ,'
--
-,
.1661
.1532
."382
.1233
,1084
u.s. SWidard
USA
Stut
Wire Gaoe ,
A90
.46~
.430.394.362"
.331
.306
.283
.2S~
"
.244.225&
.207
.192
Gage
No.
13
14
15
16
17
16
19
20
21
22
23
24
25
26
27
28
.1n
.162
.148,135
.120:106-
29
30
Galvanized
Gaoo tor
Sheet Gaoe
Uncoated for Hot·Dipped
Hot & Cold
Zinc: Coated
Rolled Sheets'
Shoets'
.0897
.0747
.0673
.0598
.0538
.0478
.0418
.0359
.0329
.0299
.0269
.0239
.0209
.0179
.0164
.0149
-
USA
Steel
Wire Gaoe
.0934
.09~
.0785
.060
.072
.0710
.0635
.0575
.0516
.0456
.0396
.0366
.0336
.0306
.0276
.0247
.0217
.0202
.0167
.0172
.0157
.06~
.054
.048.041
.035-
-
--
--
&Rounded value. The steel wire gage has been taken from ASTM AS10 "General Require.
ments for Wire Rods and Coarse Round Wire, Cartxm Steel", Sizes originally quoted to 4
decimal equivalent places have been rounded to 3 decimal places in accordance with
rounding procedures of ASTM "Recommended Practice" E29.
b
The equivalent thicknesses are for intonnation only. The product is commonly specified to
decimal thickness, not to gage number.
A-19
~
IJ
n
IJ