Pulse Modulation
KAMANASHIS SAHA
L E C T U R E R , D E P T. O F E E E ,
E A S T W E S T U N I V E R S I T Y, B A N G L A D E S H .
Content
▪ Sampling Theorem
▪ Pulse Amplitude Modulation (PAM)
▪ Pulse Duration Modulation (PDM)
▪ Pulse Position Modulation (PPM)
▪ Pulse Code Modulation (PCM)
▪ Line Codes
▪ Quantizing and Quantization Noise
▪ Nonuniform Quantization
▪ Delta Modulation
▪ M-ary Communication
Introduction
▪ In pulse modulation, some parameters of a pulse train (amplitude, duration or
position) is varied in accordance with the message signal.
▪ Sampling process is the basic to all types of pulse modulation.
▪ Two families of pulse modulation.
❑ Analog Pulse Modulation : A periodic pulse train used as a carrier wave and the
characteristic feature of each pulse in a continuous manner according to the
corresponding sample value of message signal.
❑ Digital Pulse Modulation : The message signal is represented in a form that is
discrete in both time and amplitude. It permits the transmission in digital form
as a sequence of coded pulses.
If a signal’s spectrum is band-limited to B
Hz [G(ω)=0 for 𝜔 > 2𝜋𝐵], the signal can
be reconstructed exactly (without any
error) from it’s samples taken uniformly
at a rate 𝑓𝑠 > 2𝐵 (𝑠𝑎𝑚𝑝𝑙𝑒𝑠 𝑝𝑒𝑟 𝑠𝑒𝑐𝑜𝑛𝑑). In
other word, the minimum sampling
frequency is 𝑓𝑠 = 2𝐵 𝐻𝑧.
▪ Consider a signal 𝑔(𝑡) with a bandlimited spectrum of B Hz.
▪ Sampling 𝑔(𝑡) at a rate of 𝑓𝑠 𝐻𝑧 is
done by multiplying 𝑔(𝑡) by an
impulse train 𝛿𝑇𝑠 𝑡 , consisting of unit
impulses repeating periodically every
𝑇𝑠 seconds, where 𝜔𝑠 = 2𝜋Τ𝑇𝑠 rad/sec
𝑜𝑟 𝑇𝑠 = 𝑠𝑎𝑚𝑝𝑙𝑖𝑛𝑔 𝑖𝑛𝑡𝑒𝑟𝑣𝑎𝑙 = 1Τ𝑓𝑠 𝐻𝑧.
▪ The sampled signal consists of
impulses spaced every 𝑇𝑠 seconds (the
sampling interval).
▪ The nth impulse, located at 𝑡 = 𝑛𝑇𝑠 ,
has a strength 𝑔 𝑛𝑇𝑠 , the value of g(t)
at 𝑡 = 𝑛𝑇𝑠 .
Sampling Theorem
To reconstruct g(t) from 𝑔 𝑡 , we
should be able to recover 𝐺(𝜔) from
𝐺(𝜔) and it’s possible when there is
no overlap between two successive
cycle of 𝐺(𝜔) .
The required condition:
𝑓𝑠 > 2𝐵 ⇾ 𝑇𝑠 < 1Τ2𝐵
The sampling frequency 𝑓𝑠
must be greater than twice
the signal bandwidth 2B.
The filter has a transition band extending
from W to 𝑓𝑠 − 𝑊, where 𝑓𝑠 is sampling rate.
Sampling Theorem
In practice, a information bearing signal is not strictly bandlimited which results some sort of undersampling and aliasing
is produced by sampling process.
Aliasing: The phenomenon of a high-frequency component in
the spectrum of the signal taking on the identity of a lower
frequency in the spectrum of its sampled version.
Two methods to correct the effects of aliasing in practice:
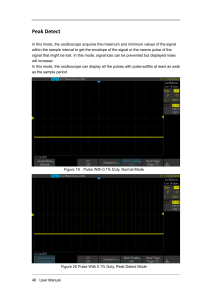
(a) Anti-alias filtered spectrum of an informationbearing signal (b) Spectrum of instantaneous sampled
version of signal assuming 𝑓𝑠 > 2𝑊 (c) Magnitude
spectrum of reconstruction filter
▪ Prior to sampling, a low pass anti-aliasing filter is used to
attenuate the high frequency components that don’t contain
any information.
▪ The filtered signal is sampled at a rate slightly higher than
Nyquist rate.
Pulse Amplitude Modulation (PAM)
• PAM is the most basic and simplest analog pulse modulation format.
• The amplitude of the regular spaced pulses are varied in accordance to the
corresponding sample values of a continuous message signal.
• The pulses could be of rectangular form or some other appropriate shape.
• The message signal is multiplied
by a periodic train of rectangular
pulses.
• In PAM wave, top of each
modulated rectangular pulse is
remained flat.
Let s(t) denotes the PAM signal as:
∞
𝑠 𝑡 = 𝑚 𝑛𝑇𝑠 ℎ(𝑡 − 𝑛𝑇𝑠 )
𝑛=−∞
𝑇𝑠 = sampling period
𝑚 𝑛𝑇𝑠 = The sample value of m(t) obtained
at time 𝑡 = 𝑛𝑇𝑠 .
h(t) = A standard rectangular pulse of unit
amplitude and duration T.
1,
0<𝑡<𝑇
1
ℎ 𝑡 =
,
𝑡 = 0, 𝑡 = 𝑇
2
0,
𝑜𝑡ℎ𝑒𝑟𝑤𝑖𝑠𝑒
The instantaneously sampled version of m(t):
∞
𝑚𝛿 𝑡 = 𝑚(𝑛𝑇𝑠 )𝛿(𝑡 − 𝑛𝑇𝑠 )
▪ Pass the PAM signal s(t) through a low pass filter.
▪ The message signal is limited to bandwidth W and 𝑓𝑠 >
2𝑊. So, the spectrum of the resulting filter output is
M 𝑓 𝐻 𝑓
▪ The Fourier transform of a rectangular pulse h(t) is:
𝐻 𝑓 = 𝑇𝑠𝑖𝑛𝑐 𝑓𝑇 exp(−𝑗𝜋𝑓𝑇) . So, the use of flat-topped
samples to generate PAM signal introduces an amplitude
distortion as well as a delay T/2.
▪ The distortion caused due to the use of PAM to transmit an
analog information- bearing signal is called aperture effect.
𝑛=−∞
Convolving 𝑚𝛿 𝑡 with the pulse h(t):
∞
𝑚𝛿 𝑡 ∗ ℎ 𝑡 = 𝑚 𝑛𝑇𝑠 ℎ 𝑡 − 𝑛𝑇𝑠 = 𝑠(𝑡)
𝑛=−∞
Applying Fourier Transform: 𝑆 𝑓 = 𝑀𝛿 𝑓 𝐻(𝑓)
System of recovering message signal m(t) from PAM signal s(t)
Pulse Amplitude Modulation (PAM)
▪ This distortion can be corrected by connecting an equalizer in cascade with the low-pass
reconstruction filter.
▪ The equalizer decreases the in-band loss of the reconstruction filter and compensate the
aperture effect. The magnitude response of an ideal equalizer is:
1
𝐻(𝑓)
=
1
𝑇𝑠𝑖𝑛𝑐(𝑓𝑇)
=
𝜋𝑓
sin𝑐(𝜋𝑓𝑇)
▪ The amplitude distortion is less than 0.5% for a duty cycle 𝑇Τ𝑇𝑠 ≤ 0.1.
▪ The transmission of PAM depends on the magnitude and phase response of the
transmission channel due to the relatively short duration of transmitted pulses.
▪ The noise performance of a PAM system never can be better than baseband signal
transmission.
▪ For the transmission over long distance, PAM is only used as a mean of message
processing for the time division multiplexing.
Other Forms of Pulse
Modulation
Improvement of the noise performance of a pulse
modulation system can be achieved at the cost of increased
bandwidth consumed by the pulses.
Pulse Duration Modulation (PDM)
• Pulse Width Modulation
• Samples of the message signal are used to vary the
duration of the individual pulses in the carrier.
• In PDM, long pulses spend considerable power while
bearing no additional information.
Pulse Position Modulation (PPM)
Fig. (a) Sinusoidal Modulating Wave (b) Pulse
Carrier (c) PDM (d) PPM
• The position of a pulse relative to its unmodulated time
of occurrence is varied in accordance with the message
signal.
• PPM is more efficient form of pulse modulation than
PDM.
▪ As additive noise only introduces vertical
perturbations, it would have no effect on the
pulse positions if the received pulses were
perfectly
rectangular.
But
perfectly
rectangular pulses require infinite channel
bandwidth which is practically impossible.
▪ With finite channel bandwidth, the received
pulses always have a finite rise time and a
PPM receiver is affected by noise.
Challenge Faced in A PPM
System
Challenge: In PPM, the transmitted information is
contained in the relative positions of the modulated
pulses. As a result, the presence of additive noise affects
the performance of the system by falsifying the time at
which the modulated pulses are detected to occur.
Solution: Noise immunity can be achieved by making the
pulse build up so rapidly that that the time interval
during which noise can exert any perturbations is very
short.
Pulse modulation permits simultaneous transmission
of several signals on a time sharing basis – Time
Division Multiplexing (TDM). A pulse modulated
signal occupies only a part of the channel time, we can
transmit several pulse modulated signals on the same
channel by interweaving them.
In the following figure,
➢ The amplitudes of analog signal m(t) lie in
the range (−𝑚𝑝 ,𝑚𝑝 ), which is partitioned
into L subintervals, each of the magnitude
2𝑚𝑝
∆𝑣 =
.
𝐿
➢ Each sample amplitude is approximated by
the midpoint value of subinterval in which
the sample falls. (L=16).
➢ Each sample is now approximated to one of
the L=16 numbers. Thus, the signal is
digitalized to the quantized value on any one
of the L values.
Pulse Code Modulation (PCM)
▪ PCM is the most widely used and basic form of digital
pulse modulation.
▪ In PCM, a message signal is represented by a sequence
of coded pulses, which is accomplished by representing
the signal in discrete form in both time and amplitude.
▪ Basic operations performed in the transmitter are
sampling, quantizing and encoding (Quantization and
encoding are done in same circuit – Analog-to-digital A/D
converter).
▪ Basic operations in the receiver are regeneration of
impaired signal, decoding and reconstruction of the train
of quantized samples.
▪ PCM is a method of converting an analog signal into a
digital signal.
▪ An analog signal is characterized by the fact that it’s
amplitude can take on an infinite number of values. On
the other hand, digital signal amplitude can take on only
a finite number of values.
▪ Analog to digital conversion can be done by sampling
and quantizing, that is, rounding off its value to one of
the closest permissible numbers (quantized levels.)
Pulse Code Modulation (PCM)
▪ The quantized signal is converted into a binary signal by using
pulse coding.
▪ The pulse code is formed by binary representation of the 16
decimal digits from 0 to 15, known as Natural Binary Code
(NBC). Each of the L=16 levels to be transmitted is assigned one
binary code of 4 digits. Thus, each sample is encoded by four bits
and an analog signal m(t) is converted into a digital (binary)
signal.
▪ To transmit this binary data, one possible way is to assign a
negative pulse for binary 0 and a positive pulse for a binary 1 so
that each sample is transmitted by a group of four binary pulses
– Pulse Code.
Binary Pulse Code
Line Codes
Unipolar Nonreturn-to-Zero (NRZ) signaling:
▪ Symbol 1 is represented by transmitting a pulse of
magnitude A for the duration of symbol, and symbol 0 is
represented by switching off the pulse.
▪ This line codes is referred as on-off signaling.
▪ Disadvantage: Waste of power due to transmitted DC
level and the power spectrum of the transmitted signal
does not approach to zero at zero frequency.
Polar Nonreturn-to-Zero (NRZ) signaling:
▪ Symbols 1 and 0 are represented by transmitting
pulses of magnitudes A and –A, respectively.
▪ This line code is relatively easy to generate.
▪ Disadvantage: The power spectrum of the transmitted
signal is large near zero frequency.
Line Codes (Contd.)
Unipolar return-to-Zero (RZ) signaling:
▪ Symbol 1 is represented by a rectangular pulse of
amplitude A and half-symbol width, and symbol 0 is
represented by switching off the pulse.
▪ An attractive feature of this code is the presence of delta
functions at 𝑓 = 0, ± 1Τ𝑇𝑏 in the power spectrum of the
transmitted signal, which can be used for bit timing
recovery at the receiver.
▪ Disadvantage: It require 3dB more power than polar
return-to-zero signaling for the same probability of
symbol error.
Split-Phase (Manchester Code) signaling:
▪ Symbols 1 is represented by a positive pulse of amplitude
A followed by a negative pulse of amplitude –A, with
both pulses being half-symbol wide.
▪ For symbol 0, the polarities of these two pulses are
reversed.
▪ Advantage: The Manchester Code suppresses the DC
component. This code has relatively insignificant low
frequency components.
▪ This line code is referred to alternate
mark inversion (AMI) signaling.
▪ Advantage: The power spectrum of the
transmitted signal has no DC component.
This code also has relatively insignificant
low-frequency component.
Line Codes (Contd.)
Bipolar return-to-Zero (BRZ) signaling:
▪ This line code uses three amplitude levels.
▪ Positive and negative pulses of equal amplitude (+A
and -A) are used alternately for symbol 1, with each
pulse having half-width,
▪ For symbol 0, pulse is always switched off.
Consider an input message signal m(t) of
continuous amplitude in the range(−𝑚𝑝 ,𝑚𝑝 ). If
L is total quantization levels of an uniform quantizer,
then quantization step size is :
∆𝑣 =
2𝑚𝑝
𝐿
Here, quantization error lies in the range
(− ∆𝑣Τ2 , ∆𝑣Τ2 ) . So,
the mean square
quantization power/error 𝜎𝑄2 is :
𝜎𝑄2 =
1 ∆𝑣Τ2 2
𝑞 𝑑𝑞
∆ −∆𝑣Τ2
=
∆𝑣 2
12
Let b denote the number of bits per sample
used in the construction of the binary code.
𝐿 = 2𝑏
𝑇ℎ𝑢𝑠,
𝑚𝑝2
∆𝑣 2 4 𝑚𝑝2
2
𝜎𝑄 =
=
=
12
12𝐿2 3.22𝑏
Let 𝜎𝑃2 denote the average power of the
message signal m(t).
Signal-to-Quantization Noise-Ratio (SQNR) is :
𝜎𝑃2 3.22𝑏 𝜎𝑃2
𝑆𝑄𝑁𝑅 = 2 =
𝜎𝑄
𝑚𝑝2
Quantization Error/Noise
Quantization Noise: Quantization error/noise is defined as
the difference between the input signal samples and the
corresponding quantized output of a quantizer.
Example: Sinusoidal Modulating Signal
The average power of sinusoidal message signal m(t) :
2
𝑚
𝑝
𝜎𝑃2 =
2
𝑇ℎ𝑢𝑠,
𝜎𝑃2 3.22𝑏
𝑆𝑄𝑁𝑅 = 2 =
2
𝜎𝑄
a𝑛𝑑 𝑆𝑄𝑁𝑅𝑑𝐵 = 10 log 𝑆𝑄𝑁𝑅 = 1.8 + 6𝑏
Nonuniform
Quantization
▪ The horizontal axis is the normalized
input signal m(t) by the signal’s peak
value 𝑚𝑝 .
▪ The vertical axis is the output signal y.
▪ The compressor maps input increment
∆𝑚 into larger increments ∆𝑦 for small
input signals and vice versa for large
input signals.
▪ Hence, a given interval ∆𝑚 contains a
larger number of steps (or smaller step
size) when m(t) is small.
▪ The quantization noise is smaller for
smaller input signal power.
▪ An
approximate
logarithmic
compression yields a quantization
noise nearly proportional to average
signal power, this making the SNR
practically independent of input signal
power over a dynamic range.
The quantization noise is directly proportional to the
square of the quantization step size.
Solution:
▪ This problem can be solved by using smaller steps for
smaller amplitudes which leads to a non-uniform
quantizer.
▪ The same result can be achieved by first compressing
signal samples and then using a uniform quantizer.
Figure: Non-uniform Quantization
Compression Laws
❖ 𝜇 − 𝑙𝑎𝑤 ∶ used in North America and
Japan.
❖ A−𝑙𝑎𝑤 ∶ used in Europe and rest of the
world.
The compressed sampled must be
restored to their original values at the
receiver by using a expander with a
characteristics complementary to that
of the compressor. The compressor
and expander together are called the
compandor.
Compression Parameters:
The compression parameters 𝜇 or A determines the degree of
compression. To obtain a nearly constant SQNR over an input signal
power dynamic range of 40 dB, 𝜇 should be greater than 100.
▪ Early North American channel used 𝜇=100 which yielded the
best result for 7-bit (128 levels) encoding.
▪ An optimum value of 𝜇=255 is used for all North American 8bit (256 levels) digital terminals.
▪ A value of A = 86.7 gives a comparable result and is selected as
standards by CCITT.
Figure: 𝜇 − 𝑙𝑎𝑤 and A−𝑙𝑎𝑤 characteristics
▪ The Nyquist Sampling Rate,
TRANSMISSION BANDWIDTH
AND THE OUTPUT SNR
𝐹𝑁 = 3 𝑘𝐻𝑧 × 2 = 6000 𝐻𝑧
▪ The Actual Sampling Rate,
𝐹𝑠 = 1
▪ We know,
∆𝑣
2
1
× 6000 𝐻𝑧 = 8000 𝐻𝑧
3
=
𝑚𝑝
𝐿
0.5
= 100 𝑚𝑝 ⟹ 𝐿 = 200
▪ Thus we need
𝑏 = log 2 200 = 7.64 ≈ 8 𝑏𝑖𝑡𝑠 𝑝𝑒𝑟 𝑠𝑎𝑚𝑝𝑙𝑒.
▪ As the actual sampling rate is 8000 Hz, we require
𝑏𝑖𝑡
to transmit a total of 𝐶 = 8000 × 8 = 64000 .
𝑠𝑒𝑐
▪ As we can transmit up-to 2 bits/sec per hertz of
bandwidth, we require a minimum transmission
bandwidth :
𝐵𝑇 =
𝐶
2
= 32000 𝐻𝑧 = 32 𝑘𝐻𝑧
▪ Total minimum transmission bandwidth required to
transmit time-multiplexed 24 signals is:
𝐵𝑇𝑀 = 32 × 24 𝑘𝐻𝑧 = 768 𝑘𝐻𝑧 = 0.768 𝑀𝐻𝑧
Each quantized sample encoded into n bits. As a signal
m(t) band-limited to B Hz requires a minimum of 2B
samples per second, we require a total of 2nB bits per
seconds (bps), means 2nB pieces of information per
second.
As a unit bandwidth (1 Hz) can transmit a maximum of two
pieces of information per second, a minimal channel
bandwidth of 𝐵𝑇 Hz is required : 𝐵𝑇 = 𝑛𝐵 𝐻𝑧.
Example: 6.2 [Modern Digital and Analog Communication
Systems B. P. Lathi 3rd EdITION]
Delta Modulation(DM)
▪ DM provides a staircase approximation to the message signal.
▪ The difference between the input and the approximation is quantized into only two levels, namely
± ∆, corresponding to positive and negative differences.
▪ If the approximation falls below the signal at
any sampling epoch, it is increased by Δ , On
the other hand, if the approximation lies
below the signal, it is diminished by Δ.
▪ In DM, an incoming message signal is
oversampled (at a sampling rate much higher
than Nyquist Rate) purposely to increase the
correlation between the adjacent samples.
▪ The staircase approximation remains within
± ∆ of the input signal.
Illustration of Delta Modulation
▪ Ler m(t) denotes the message signal and
𝑚𝑞 (𝑡) denotes its staircase approximation.
𝑚 𝑛 = 𝑚 𝑛𝑇𝑠 ,
𝑛 = 0, ±1, ±2 … … . .
𝑇𝑠 = 𝑆𝑎𝑚𝑝𝑙𝑖𝑛𝑔 𝑝𝑒𝑟𝑖𝑜𝑑
𝑚 𝑛𝑇𝑠 = 𝐴 𝑠𝑎𝑚𝑝𝑙𝑒 𝑜𝑓 𝑚 𝑡 𝑡𝑎𝑘𝑒𝑛 𝑎𝑡 𝑎 𝑡𝑖𝑚𝑒 𝑡 = 𝑛𝑇𝑠
▪ The basic principles of delta modulation,
𝑒[𝑛] = 𝑚 𝑛 − 𝑚𝑞 (𝑛 − 1)
𝑒𝑞 = ∆. sgn 𝑒 𝑛 , 𝑤ℎ𝑒𝑟𝑒 ∆= 𝑆𝑡𝑒𝑝 𝑠𝑖𝑧𝑒
𝑚𝑞 𝑛 = 𝑚𝑞 𝑛 − 1 + 𝑒𝑞 (𝑛)
𝑒 𝑛 = 𝐴𝑛 𝑒𝑟𝑟𝑜𝑟 𝑠𝑖𝑔𝑛𝑎𝑙 𝑟𝑒𝑝𝑟𝑒𝑠𝑒𝑛𝑡𝑖𝑛𝑔 𝑡ℎ𝑒
𝑑𝑖𝑓𝑓𝑒𝑟𝑒𝑛𝑐𝑒 𝑏𝑒𝑡𝑤𝑒𝑒𝑛 𝑡ℎ𝑒 𝑝𝑟𝑒𝑠𝑒𝑛𝑡 𝑠𝑎𝑚𝑝𝑙𝑒 𝑚 𝑛 𝑜𝑓
Delta Modulation
DM is the simplest modulation scheme generated by
applying the sampled version of the message signal to a
modulator that involves a comparator, quantizer and the
accumulated.
▪ The comparator computes the difference between its two
inputs (two successive samples of message signal).
▪ The block labeled 𝑧 −1 inside the accumulator represents a
unit delay equal to one sampling period.
▪ The quantizer, consists of a band limiter with an inputoutput relation that is a scaled version of the signum
function. The quantizer output is applied to the accumulator.
𝑡ℎ𝑒 𝑖𝑛𝑝𝑢𝑡 𝑠𝑖𝑔𝑛𝑎𝑙 𝑎𝑛𝑑 𝑡ℎ𝑒 𝑙𝑎𝑡𝑒𝑠𝑡 𝑎𝑝𝑝𝑟𝑜𝑥𝑖𝑚𝑎𝑡𝑖𝑜𝑛
𝑚𝑞 𝑛 − 1 𝑡𝑜 𝑖𝑡
𝑒𝑞 𝑛 = 𝑄𝑢𝑎𝑛𝑡𝑖𝑧𝑒𝑑 𝑣𝑒𝑟𝑠𝑖𝑜𝑛 𝑜𝑓 𝑒 𝑛
sgn
= 𝑆𝑖𝑔𝑛𝑢𝑚 𝑓𝑢𝑛𝑐𝑡𝑖𝑜𝑛
𝑚𝑞 𝑛 = 𝑄𝑢𝑎𝑛𝑡𝑖𝑧𝑒𝑑 𝑂𝑢𝑡𝑝𝑢𝑡 𝑐𝑜𝑑𝑒𝑑 𝑡𝑜 𝑝𝑟𝑜𝑑𝑢𝑐𝑒 𝐷𝑀
▪ In DM, the rate of information transmission =
Sampling rate, 𝑓𝑠 = 1Τ𝑇𝑠
Transmitter of a DM System
Noise of
Delta Modulation
Two types of quantization error:
❑ Slope overload distortion (noise)
❑ Granular noise
Granular noise:
▪ Granular noise occurs when step size Δ is
too large relative to the local slope
characteristics of the input message signal
waveform m(t), causing the staircase
approximation 𝑚𝑞 𝑡
to hunt around a
relatively flat segment of the message signal.
▪ Granular noise is analogous to quantization
noise in PCM.
Choice of an optimized quantization step size
is the result of a compromise between slope
overload distortion and granular noise which
results in the minimum quantization of
a Delta Modulator
𝑂𝑢𝑡𝑝𝑢𝑡 𝑜𝑓 𝑡ℎ𝑒 𝐴𝑐𝑐𝑢𝑚𝑢𝑙𝑎𝑡𝑜𝑟:
▪ At the sampling instant 𝑛𝑇𝑠 , the accumulator increases
the approximation by a step Δ is a positive or negative
direction, depending on the sign of the error e[n].
▪ If the input sample 𝑚 𝑛 is greater than the most recent
approximation 𝑚𝑞 (𝑛 − 1) , a positive increment +Δ is
applied to the approximation.
▪ If the input sample 𝑚 𝑛 is smaller than the most recent
approximation 𝑚𝑞 (𝑛 − 1) , a negative increment -Δ is
applied to the approximation.
▪ Thus the accumulator does its best to track the input
samples by one step (+Δ or -Δ) at a time.
𝑅𝑒𝑐𝑖𝑒𝑣𝑒𝑟 𝑜𝑓 𝐷𝑀 𝑆𝑦𝑠𝑡𝑒𝑚
If we consider the maximum slope of the
incoming message signal m(t), in order for
the for the sequence of samples {𝑚𝑞 [𝑛]} to
increase as fast as the input sequence of
samples {𝑚[𝑛]} in a region of maximum
slope of m(t), the required condition to be
satisfied is :
∆
𝑑𝑚(𝑡)
= ∆. 𝑓𝑠 ≥ 𝑚𝑎𝑥
𝑇𝑠
𝑑𝑡
If the step size Δ is too small for the staircase
approximation 𝑚𝑞 (𝑡) to follow a steep segment
of the input waveform m(t), then 𝑚𝑞 (𝑡) falls
behind m(t). This condition is called and the
resulting quantization error is called slope
overload distortion.
Slope Overload Noise in
DM System
Slope overload distortion: If message signal m(t) changes too fast,
that is, 𝑚(𝑡)
ሶ
is too large compared to the step size Δ (threshold of
coding), 𝑚𝑞 𝑛 can not follow the m(t) and overload occurs. It is
called slope overload noise.
Here output of the accumulator 𝑚𝑞 𝑛 represents the accumulation of
positive and negative increments of magnitude Δ. Denoting the
quantization error by q[n],
𝑚𝑞 𝑛 = 𝑚 𝑛 + 𝑞 𝑛
𝑇ℎ𝑒 𝑖𝑛𝑝𝑢𝑡 𝑡𝑜 𝑡ℎ𝑒 𝑞𝑢𝑎𝑛𝑡𝑖𝑧𝑒𝑟 𝑖𝑠:
𝑒 𝑛 = 𝑚 𝑛 − 𝑚𝑞 𝑛 = 𝑚 𝑛 − 𝑚 𝑛 − 1 − 𝑞[𝑛 − 1]
For the case of tone modulation (a sinusoidal
message) 𝑚 𝑡 = 𝐴𝑐𝑜𝑠 𝜔𝑡 , the condition for no
slope overload noise is:
𝑚𝑎 𝑥
𝑑𝑚 𝑡
𝑑𝑡
∆
= 𝜔𝐴 < 𝑇 = ∆. 𝑓𝑠
𝑠
Illustration of two different types of quantization error in DM
Self Study: 𝐴𝑝𝑝𝑟𝑜𝑎𝑐ℎ𝑒𝑠 𝑡𝑜 𝑜𝑣𝑒𝑟𝑐𝑜𝑚𝑒 𝑡ℎ𝑒 𝑆𝑙𝑜𝑝𝑒 𝑂𝑣𝑒𝑟𝑙𝑜𝑎𝑑 𝑁𝑜𝑖𝑠𝑒
𝑖𝑛 𝐷𝑒𝑙𝑡𝑎 𝑀𝑜𝑑𝑢𝑙𝑎𝑡𝑖𝑜𝑛 𝑆𝑐ℎ𝑒𝑚𝑒
▪ The information source of a M-ary PAM
system emits a sequence of symbols from an
alphabet that consists of M equally likely and
statistically independent symbols, with each
symbol duration denoted by T seconds.
▪ Each amplitude level at pulse-amplitude
modulator output corresponds to a symbol
from M distinct amplitude levels to be
transmitted.
▪ The signaling rate of the system = 1/𝑇
𝑠𝑦𝑚𝑏𝑜𝑙𝑠 𝑝𝑒𝑟 𝑠𝑒𝑐𝑜𝑛𝑑 𝑜𝑟 𝑏𝑎𝑢𝑑𝑠
▪ For a 𝑀 = 4 symbols quatnary system, the four
dibits are 00, 01, 10 and 11. Each symbol
represents 2 bits of information and hence,
1 𝑏𝑎𝑢𝑑 = 2 𝑏𝑖𝑡𝑠 𝑝𝑒𝑟 𝑠𝑒𝑐𝑜𝑛𝑑.
▪ For a M-ary PAM system,
1 𝑏𝑎𝑢𝑑 = log 2 𝑀 𝑏𝑖𝑡𝑠 𝑝𝑒𝑟 𝑠𝑒𝑐𝑜𝑛𝑑
𝑇ℎ𝑒 𝑠𝑦𝑚𝑏𝑜𝑙 𝑑𝑢𝑟𝑎𝑡𝑖𝑜𝑛 𝑇 = 𝑇𝑏 log 2 𝑀
𝑇𝑏 = 𝐵𝑖𝑡 𝑑𝑢𝑟𝑎𝑡𝑖𝑜𝑛 𝑜𝑓 𝑒𝑞𝑢𝑖𝑣𝑎𝑙𝑒𝑛𝑡 𝑏𝑖𝑛𝑎𝑟𝑦 𝑃𝐴𝑀
▪ By using an M-ary PAM system, we are able to
transmit information at a rate log 2 𝑀 times
faster than the corresponding binary PAM
system.
▪ To realize the same average probability of
symbol error, an M-ary PAM system requires
more transmitted power.
Baseband M-ary PAM
Transmission
Definition: In baseband binary PAM system, the pulseamplitude modulator produces binary pulses, pulses with
one of two possible amplitude levels. On the other hand, in
M-ary PAM system, pulse-amplitude modulator produces
pulses with one of M possible amplitude levels where M>2.
A quaternary (M=4) PAM system is illustrated in the above
figure for a binary data sequence 00101110111. The
waveform is shown based on the electrical representation for
each of the four possible dibits (pair of bits).
Note: This representation is gray encoded.
M-ary Communication
• To transmit n binary digits, we need only 𝑛Τ2 4-ary pulses.
• One 4-ary symbol can transmit the information of two binary
digits.
• As three binary digits can form 2x2x2=8 combinations, a group
of 3 bits can be transmitted by one 8-ary symbol.
• A group of 4 bits can be transmitted by one 16-ary symbol.
▪ In general, the information 𝐼𝑀 transmitted by an M-ary symbol is: 𝐼𝑀 = log 2 𝑀 𝑏𝑖𝑛𝑎𝑟𝑦 𝑑𝑖𝑔𝑖𝑡𝑠 𝑜𝑟 𝑏𝑖𝑡𝑠.
▪ The rate of information transmission can be increased by increased by increasing M. But the transmitted
power is increased by the factor of 𝑀2 .
▪ To increase the rate of communication by a factor of log 2 𝑀, the required power increases as 𝑀2 . Thus
transmission bandwidth can be reduced by a factor log 2 𝑀 at the cost of increased power.