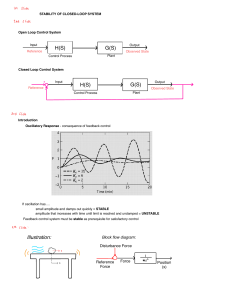
1 EE471 – CONTROLS 1 - Dr. Weisong Tian 2 Stability of Control Systems • When considering the design and analysis of feedback control system, stability is of utmost importance. Bounded input Bounded output T(s) • Definition of stability: • For any bounded input, if the output is bounded (BIBO), then the system is said to be stable. • Definition of bounded: for any time t, if there exists a positive constant c, such that 𝑓 𝑡 ≤ 𝑐, then we consider the function 𝑓 𝑡 is bounded. 3 Stability of Control Systems • The stability status of a control system can be categorized into: 1. Stable 2. Neutral (called marginally stable, M.S.) 3. Unstable Stable M.S. System Not Stable Unstable 4 Stability • Stable: BIBO • M.S.: only certain bounded inputs (sinusoids of the frequency of the poles) will drive the output unbounded. • Unstable: system output is unbounded for bounded inputs. • Theorem: The stability of a system is determined by the location of the poles of the closed-loop transfer function. 5 Determine Stability imaginary • Assume 𝑃𝐾 are the poles of the closed-loop transfer function. Stable Unstable • Stable: All the poles are in the left half plane, i.e., 𝑅𝑒 𝑃𝐾 < 0 • Marginally stable (M.S.): Poles are either in the left half plane or are simple roots on the imaginary axis • Unstable: Either one pole in the right half plane, or repeated poles on the imaginary axis. real 6 Example: determine the stability of the following systems 1. 2. 3. 4. 5. 6. 7. 1 𝑠+1 𝑠+2 1 𝑠−1 𝑠+2 1 𝑠+1 𝑠 1 𝑠+1 𝑠2 1 𝑠 𝑠+1 𝑠2 +4 1 𝑠+2 𝑠2 +4 2 1 𝑠2 +16𝑠+64 7 Example • For the system 𝑌 𝑠 = 1. 𝑟 𝑡 = 1 2. 𝑟 𝑡 = sin 𝑡 3. 𝑟 𝑡 = sin 2𝑡 1 𝑅 𝑠 2 +1 𝑠 , Find y(t) for the following reference signals 8 Design control system • Try to avoid unstable systems • For M.S. systems, the steady state output will be sustained oscillation for a bounded input, unless the input is a sinusoid signal whose frequency is equal to that of the imaginary-axis root. 9 Challenges: • Suppose 𝑇 𝑠 = 1 𝑎𝑛 𝑠 𝑛 + 𝑎𝑛−1 𝑠 𝑛−1 + ⋯ + 𝑎1 𝑠 + 𝑎0 • Determine the stability of T(s) if we cannot compute the roots. • Motivations: 1. 2. It is difficult to compute the roots of a high-order polynomial Some of the constants 𝑎𝑖 ’s may unknown or TBD. • Motivating example: design K such that the closed loop system is stable 10 A quick way to spot unstable system • Theorem: If the parameters of the characteristic equation are not with the same sign, then the system must be unstable. • Example: Different sign: unstable. 1. 𝑃1 𝑠 = 𝑠 2 − 𝑠 + 2 2. 𝑃2 𝑠 = −𝑠 4 + 𝑠 3 + 𝑠 2 + 𝑠 + 1 • The “sign” method is only a necessary condition. It can only be used to spot some unstable systems. Different sign Unstable Same sign Stable 11 Routh-Hurwitz Criterion • A sufficient and necessary condition for stability • A method to determine stability without computing the roots • A useful method for controller design 12 Method: Routh Array • The Routh-Hurwitz criterion is based on ordering the coefficients of the • • • • characteristic equation 𝑃 𝑠 = 𝑎𝑛 𝑠 𝑛 + 𝑎𝑛−1 𝑠 𝑛−1 + ⋯ + 𝑎1 𝑠 + 𝑎0 into a Routh array as: Further rows of the schedule are then completed as where 13 Routh-Hurwitz Criterion • We stop at 𝑠 0 . • Then examine the first column of the schedule • The number of roots with positive real part is equal to the number of changes in sign of the first column of the Routh array. • If there is no change of sign in the first column, then the system is stable. • This is a necessary and sufficient condition. • In addition, the number of sign changes represents the number of unstable poles. 14 Example • 𝑃 𝑠 = 𝑠 3 + 𝑠 2 + 2𝑠 + 24 15 Example • 𝑃 𝑠 = 𝑠 6 + 4𝑠 5 + 3𝑠 4 + 2𝑠 3 + 𝑠 2 + 4𝑠 + 4 16 Four possible scenarios • Four distinct cases or configurations of the first column of the Routh array must be considered, and each must be treated separately and requires suitable modifications of the array calculation procedure: 1. No element in the first column is zero 2. There is a zero in the first column, but some other elements of the row containing the zero in the first column are nonzero 3. There is a zero in the first column, and the other elements of the row containing the zero are also zero (an entire zero row) 4. Multiple zero rows 17 Case 2 • Case 2: There is a zero in the first column, but some other elements of the row containing the zero in the first column are nonzero • Solution: replace this zero in the first column by a small constant 𝜀 > 0. 18 Example • 𝑠 5 + 2𝑠 4 + 2𝑠 3 + 4𝑠 2 + 11𝑠 + 10 = 0 19 Case 3 • An entire row is zero • Solution: Use auxiliary polynomial 1. Step 1: Go the row above the zero row to get the auxiliary polynomial 𝑝(𝑠) 2. Step 2: Take derivative 𝑝′ 𝑠 3. Step 3: Use the coefficients in 𝑝′ 𝑠 to replace the zero row • Note: The order of the auxiliary polynomial is always even and indicates the number of symmetrical root pairs. • Result 1: Sign change: unstable • Result 2: No sign change Stable • Need to solve auxiliary polynomial 𝑝 𝑠 = 0 see if zeros on the imaginary axis 20 Example • 𝑠 4 + 3𝑠 3 + 6𝑠 2 + 12𝑠 + 8 = 0 21 Case 4 • Multiple rows of zeros => repeated imaginary poles => unstable • Example: 𝑃 𝑠 = 𝑠 5 + 𝑠 4 + 2𝑠 3 + 2𝑠 2 + 𝑠 + 1 22 Example • Determine the range of K, such that the following polynomial is stable • 𝑠 4 + 𝑠 3 + 3𝑠 2 + 2𝑠 + 𝐾 23 Example • Design the control gain K, so that the system is stable 24 Use Routh Array to Design a Controller In the control system, 𝑎 > 0 is a constant. Design the gain K, so that the system is stable.