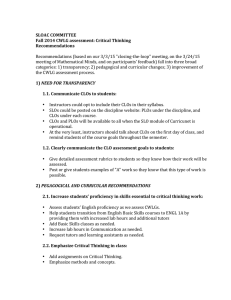
autonomous monitoring system to meet nonprecision landing approach requirements. ACKNOWLEDGMENTS [13] [14] The authors would like to thank Prof. I. Y. Bar-Itzhack of the Technion for his comments and suggestions. REN DA CHING-FANG LIN American GNC Corp. P.O. Box 10987 Canoga Park, CA 91304 [15] [16] REFERENCES [17] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] 506 Willsky, A. S. (1976) A survey of design methods for failure detection in dynamic systems. Automatica, 12 (1976), 601—611. Isermann, R. (1984) Process fault detection based on modeling and estimation methods–A survey. Automatica, 20, 4 (1984), 387—404. Kerr, T. H. (1987) Decentralized Kalman filtering and redundancy management for multisensor navigation. IEEE Transactions on Aerospace and Electronic Systems, 23, 1 (1987), 83—119. Gertler, J. J. (1988) Survey of model based failure detection and isolation in complex plants. IEEE Control Systems Magazine, 8, 6 (1988), 3—11. Frank, P. M. (1990) Fault diagnosis in dynamic system using analytical and knowledge-based redundancy–A survey and some new results. Automatica, 26, 1 (1990), 459—474. Lin, C. F. (1991) Modern Navigation, Guidance, and Control Processing. Englewood Cliffs, NJ: Prentice-Hall, 1991. Lin, C. F. (Ed.) (1994) Advanced Control System Design. Englewood Cliffs, NJ: Prentice-Hall, 1994. Maybeck, P. S. (1979) Stochastic Models, Estimation, and Control, Vol. 1. New York: Academic Press, 1979. Mehra, R. K., and Peschon, J. (1971) An innovations approach to fault detection and diagnosis in dynamic systems. Automatica, 7 (1971), 637—640. Kerr, T. H. (1977) Real-time failure detection: A static nonlinear optimization problem that yields a two ellipsoid overlap test. Journal of Optimization Theory and Application, 20, 4 (1977), 509—536. Kerr, T. H. (1980) Statistical analysis of a two-ellipsoid overlap test for real-time failure detection. IEEE Transactions on Automatic Control, 25, 4 (1980), 762—772. Brumback, B. D., and Srinath, M. D. (1987) Fault-tolerant multisensor navigation system design. IEEE Transactions on Aerospace and Electronic Systems, 23, 6 (1987), 738—755. [18] [19] [20] [21] Da, R. (1994) Failure detection of dynamical systems with state chi-square test. AIAA Journal of Guidance, Control, and Dynamics, 17, 2 (1994), 271—277. Bar-Itzhack, I. Y. (1982) Minimal order time sharing filters for INS in-flight alignment. Journal of Guidance and Control, 5, 4 (1982), 396—402. Brown, G., and Hwang, P. C. (1986) GPS failure detection by autonomous means within the cockpit. Navigation: Journal of the Institute of Navigation, 33, 4 (1986), 335—353. Braff, R., and Shively, C. (1985) GPS integrity channel. Navigation: Journal of the Institute of Navigation, 32, 4 (1985), 334—350. Jorgensen, P. S. (1987) Achieving GPS integrity and eliminating areas of degraded performance. Navigation: Journal of the Institute of Navigation, 34, 4 (1987), 297—306. Kalafus, R. H. (1989) GPS integrity channel RTCA working group recommendations. Navigation: Journal of Institute of Navigation, 36, 1 (1989), 25—44. Sturza, M. A. (1988) Navigation system integrity monitoring using redundant measurements. Navigation: Journal of the Institute of Navigation, 35, 4 (1988), 483—501. Jazwinski, A. H. (1992) Stochastic Processes and Filtering Theory. New York: Academic Press, 1970. Mendenhall, W., and Sincich, T. (1992) Statistics for Engineering and the Science (5th ed.). San Francisco: Dellen, 1992. Improved Command to Line-of-Sight for Homing Guidance The command to line-of-sight (CLOS) guidance is known to require very high acceleration commands as the distance between a missile and its target becomes closer. Therefore, the CLOS is generally used for midcourse guidance. In order to use the CLOS for homing, an additional feedforward acceleration command (FFC) is necessary. In this correspondence an improved CLOS (ICLOS) technique which includes FFC is proposed. Its performance improvement is demonstrated by applying the technique to a surface-to-air missile (SAM). Manuscript received July 14, 1994; revised September 20, 1994. IEEE Log No. T-AES/31/1/08037. This work was partially supported by the Agency for Defense Development, Korea. c 1995 IEEE 0018-9251/95/$10.00 ° IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 31, NO. 1 JANUARY 1995 Authorized licensed use limited to: Apple. Downloaded on November 06,2023 at 14:37:57 UTC from IEEE Xplore. Restrictions apply. Fig. 1. Guidance of missile to target using CLOS. Fig. 2. CLOS guidance command displacement error. I. INTRODUCTION The principle of the command to line-of-sight (CLOS) is to force a missile to fly along an instantaneous line-of-sight (LOS) between a launcher and a target. If the missile can continuously stay on the LOS, it will eventually hit the target [1—3]. However, Fig. 1 shows that a missile requires large lateral guidance commands as it approaches its target. Therefore, it is difficult to employ the CLOS for homing guidance. This correspondence presents an improved command to line-of-sight (ICLOS) technique that is suitable for homing guidance. To use a CLOS for homing guidance, an additional feedforward acceleration command (FFC) is necessary to compensate the high-acceleration requirements at the final stage. In previous attempts, the FFC was computed under the assumption that the accelerations of a target and a rotating LOS have the same direction [3, 4]. The main idea of our proposed method is that the motion of a target is not circular but straight in the duration of computing a guidance command. The method to reduce errors generated from this assumption is to compensate errors of the FFC with a new weight function, resulting in decreasing miss distance. An improvement in the ICLOS is confirmed via a simulation of a surface-to-air missile (SAM). And it should be noted that the other system errors influencing the performance of CLOS like radar, autopilot, and actuator errors are not considered in the simulation. The main purpose of this work is to demonstrate an improvement in calculating a CLOS guidance command. II. IMPROVED CLOS The FFCs are the components perpendicular to the LOS between the launcher and the missile under the assumption that a missile stays on the LOS [3, 4]. Because the x-axis acceleration in the missile body frame is not controllable, the FFCs deal with two accelerations perpendicular to the x-axis. A general FFC Af is readily obtained from (1) whose derivation Fig. 3. Incoming target (Case I). is in the Appendix μ ¶ μ _ Ã_ cosμ ¶ afy R Ã̈ cosμ ¡ 2R Ã_ μ_ sinμ + 2R = Af = _ μ_ ¡ R μ̈ ¡ R Ã_ 2 cosμ sinμ ¡2 R afz (1) where afy and afz are the y- and z-axis commands, respectively. R is the range from the launcher to the missile on the LOS, and μ and à are the elevation and the azimuth angle of the LOS. The FFCs are computed from the rotating LOS without considering the actual motion of a target. Consequently, when the target motion is not circular, there can be a displacement error. For instance, if a target moves along a straight line as in Fig. 2, a target velocity vector V is divided into Vc and Vo . In the CLOS, the missile acceleration command is computed using only the target acceleration component along Vc . Since the acceleration component along Vo is neglected, the predicted LOS has an angle displacement error ". In midcourse guidance, the effect of " is negligible. However, in homing guidance, " can be a critical error resulting in a large miss distance in the final stage. This " can be removed by adding a weight function K to afy and afz . The process of obtaining the weight function K falls into one of the following three cases. Case I: incoming target (refer to Fig. 3), Case II: outgoing target (refer to Fig. 4), and Case III: crossing target (refer to Fig. 5). It is assumed that the target moves along a straight line and maintains a constant velocity in the duration of computing a guidance command. Also it is assumed that the missile is on the LOS between the launcher and the target. CORRESPONDENCE Authorized licensed use limited to: Apple. Downloaded on November 06,2023 at 14:37:57 UTC from IEEE Xplore. Restrictions apply. 507 Fig. 6. Systemic flow of missile. given by K = LN=LM Fig. 4. Outgoing target (Case II). = sin(® + Á+ )=(sin(® + Á) cos(Á+ ¡ Á)): (6) For the case of the outgoing target, LN is less than LM as in Fig. 4, and K is less than 1. Equations (7) and (8) show LM and LN, respectively. The equations corresponding to LM and LN are the same as the previous case (Case I). Therefore, K is exactly the same as before LM = V ¢t cos¯ = V ¢t sin(® + Á) Fig. 5. Crossing target (Case III). LN = V ¢t sin°= sin(¼ ¡ ¯ ¡ °) For the incoming target as in Fig. 3, if Á¡ , Á, R ¡ , and R are known, the direction angle of a target ®, at time t, is expressed by μ ¶ R(t) sinÁ(t) ¡ R(t ¡ ¢t) sinÁ(t ¡ ¢t) ® = tan ¡1 : R(t ¡ ¢t) cosÁ(t ¡ ¢t) ¡ R(t) cosÁ(t) (2) The predicted angle of the LOS, Á+ , at time t + ¢t, is readily obtained by μ ¶ 2R(t) sinÁ(t) ¡ R(t ¡ ¢t) sinÁ(t ¡ ¢t) + ¡1 Á = tan : 2R(t) cosÁ(t) ¡ R(t ¡ ¢t) cosÁ(t ¡ ¢t) (3) Employing the guidance command Af computed from (1), the missile will be located on the LOS at position M after time ¢t. If the target velocity vector is divided into two components as in Fig. 3, the length of LM is a target acceleration component perpendicular to the LOS. However, since the real target is located at position N, the discrepancy has to be compensated. The lengths of LM and LN are calculated by LM = V ¢t cos¯ = V ¢t sin(® + Á) (4) LN = V ¢t sin(¼ ¡ °)= sin(³) = V ¢t sin(® + Á+ )= cos(Á+ ¡ Á): (5) The weight function K should be multiplied to Af so that the missile moves to the position N and this is given by LN=LM. Hence, using (4) and (5), K is 508 (7) = V ¢t sin(® + Á+ )= cos(Á+ ¡ Á): (8) If we compute K from Fig. 5, the following results can be obtained. It should be noted that K equals 1. This coincides with the previous case, i.e., (6) ® + Á = ¼=2 (9) ® + Á+ = (® + Á) + (Á+ ¡ Á) = ¼=2 + (Á+ ¡ Á) (10) K = sin(® + Á+ )=(sin(® + Á) cos(Á+ ¡ Á)) = sin(¼=2 + (Á+ ¡ Á))=(sin(¼=2) cos(Á+ ¡ Á)) = cos(Á+ ¡ Á)= cos(Á+ ¡ Á) = 1: (11) As mentioned above, the new guidance command An is expressed by μ ¶ μ ¶ any Ky afy = (12) An = a nz Kz afz where Ky and Kz are weight functions computed from (6). III. SIMULATION RESULTS To compare the ICLOS guidance with a conventional CLOS, a simulation is executed. A SAM system in Fig. 6 is selected for simulation. Fig. 7 shows the initial position and velocity of a target for the simulation, where the initial height is 0[m], initial range of x-axis is 3,500[m], and initial velocity is Mach 1. Three different cases of 30± , 45± , and 60± target directions to the y-axis of the inertial frame were carried out. Miss distance is selected as IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 31, NO. 1 JANUARY 1995 Authorized licensed use limited to: Apple. Downloaded on November 06,2023 at 14:37:57 UTC from IEEE Xplore. Restrictions apply. Fig. 7. Initial position and velocity of target for simulation. TABLE I Comparison of Conventional CLOS and Improved CLOS Fig. 8. Calculation of feedforward acceleration. The x-component is due to the change in length of R. The y-component comes from the change in direction of the X ¡ Y component of R due to the swinging of R with Ã. The z-component is due to the swinging of R with μ. The acceleration of the particle is determined from the vector changes in the three velocity components in Fig. 8 as these components change in magnitude the indicator of the performance of homing guidance. and direction. During time dt, the component ºR The results of these cases are shown in Table I. It undergoes changes dºR , ºR cosμ dÃ, and ºR dμ in the can be observed from the table that the ICLOS is x-, y-, and z-axes, respectively. The y-component plays consistantly superior to that of the conventional CLOS a role only in the X ¡ Y projection of ºR . During the with FFC. The table also shows that the case of 45± same interval, ºÃ undergoes changes dºÃ in the y-axis provides higher improvement than the other two cases, and ºÃ dà parallel to the X ¡ Y plane. The change where the intercepting angle is almost perpendicular. of ºÃ consists of two components, ºÃ dà cosμ in the negative x-axis and ºÃ dà sinμ in the positive z-axis. IV. CONCLUSIONS Finally, ºμ has the vector changes dºμ , ºμ sinμ dÃ, and ºμ dμ in the z-, minus y-, minus x-axes, respectively. For homing guidance, a technique to improve the The y-component is due only to the swinging of the CLOS guidance is proposed in this paper. In order to X ¡ Y projection of ºμ . By collecting these terms, the reduce the displacement error induced in calculating three components of the vector change in velocity are the FFC, a weight function K is employed. The found to be weight function K is geometrically derived under the jdºjx = dºR ¡ ºÃ cosμ dà ¡ ºμ dμ assumption that a target moves along a straight line and maintains a constant velocity during a computation jdºjy = ºR cosμ dà + dºÃ ¡ ºμ sinμ dà (14) step of the guidance command. To compare the ICLOS with a conventional CLOS, a SAM model is used jdºjz = ºR dμ + ºÃ sinμ dà + dºμ : for simulation. The simulation results show that the guidance performance of the ICLOS is superior to that Upon substitution of the expressions for ºR , ºÃ , and ºμ , dividing by dt, and rearranging the terms, the of a conventional CLOS. Therefore, the ICLOS will enhance the missile performance in the case of homing acceleration and its components become guidance. (15) a = ax + ay + az where jajx = R̈ ¡ R μ_ 2 ¡ R Ã_ 2 cos2 μ APPENDIX The location of a particle at A may be described by spherical coordinates as shown in Fig. 8. The velocity of the particle may also be expressed in terms of its three components, º = ºx + ºy + ºz where _ jºjx = R jºjy = R Ã_ cosμ _ jºjz = R μ: (13) cosμ d 2 _ (R Ã) ¡ 2R Ã_ μ_ sinμ R dt 1 d 2_ (R μ) + R Ã_ 2 sinμ cosμ: jajz = R dt jajy = Out of the three components, jajx is of no interest in the CLOS guidance. The last two components are only utilized, and they are given in (16) μ ¶ μ _ Ã_ cosμ ¶ afy R Ã̈ cosμ ¡ 2R Ã_ μ_ sinμ + 2R Af = = : _ μ_ ¡ R μ̈ ¡ R Ã_ 2 cosμ sinμ ¡2R afz (16) CORRESPONDENCE Authorized licensed use limited to: Apple. Downloaded on November 06,2023 at 14:37:57 UTC from IEEE Xplore. Restrictions apply. 509 GYU TAEK LEE JANG GYU LEE Automatic Control Research Center Dept. of Control and Instrumentation Engineering College of Engineering Seoul National University San 56-1 Shinrim-Dong, Kwanak-Ku Seoul 151-742 Korea REFERENCES [1] [2] [3] [4] [5] [6] Siegal, J., and Lee, J. G. (1978) Evaluation of command to line-of-sight guidance for medium range missiles. Report TR-1053-2, The Analytic Sciences Corp., June 1978. Ha, I-J., and Chong, S. (1992) Design of a CLOS guidance law via feedback linearization. IEEE Transactions on Aerospace and Electronic Systems, 28, 1 (1992), 61—63. Garnell, P., and East, D. J. (1977) Guided Weapon Control Systems. Elmsford, NY: Pergamon, 1977, 140—152. Lin, C.-F. (1991) Modern Navigation, Guidance and Control Processing. Englewood Cliffs, NJ: Prentice-Hall, 1991, 318—319. Blakelock, J. H. (1991) Automatic Control of Aircraft and Missiles (2nd ed.). New York: Wiley, 1991, 273—279. Kain, J. E., and Yost, D. J. (1977) Command to line-of-sight guidance: A stochastic optimal control problem. Journal of Spacecraft and Rockets, 14, 7 (July 1977), 438—444. Comments on “Analysis of Geolocation by TDOA” Reference [1] gives an alternative solution algorithm for the time difference of arrival (TDOA) problem and makes a number of unjustified claims. The paper shows the following. 1) With an emitter on a spherical Earth, the problem of three-receiver geolocation is reduced to the solution of a quartic equation. 2) Four-receiver geolocation can be obtained by solving a quadratic equation. Both of these results were already obtained in [2], which shows that even more general cases can be reduced to the quartic solution. The algorithm in [1] is in Earth-fixed coordinates, which may have some minor computational advantage, but certainly does not convey as much physical insight as the results of [2]. These are relatively minor matters. More objectionable are the following claims made in [1]. 1) The solution method can be easily extended to the extra-receiver geolocation problem. 2) Previous error analysis formulations such as that given in [3] are invalid for the correlated TDOA data. Also, the position variance from [3] is for iterative solution only, not for exact solution. Claim 1 follows from the proposal in [1] to use pseudoinversion to solve a set of “over-determined equivalent observation equations” similar to (7) and then substitute the result into one of (3). This procedure only yields a solution of questionable accuracy for the following reasons: 1) The procedure favors the particular (3) that is used, as this equation is satified exactly, while (7) is satisfied approximately. An injudicious choice of the particular (3) may result in a poor solution. 2) Equation (7) is highly correlated and not of uniform accuracy, a straightforward pseudoinversion does not produce an “optimum” solution. Claim 2 is erroneous as even a cursory reading of [3] will reveal that the formulation does not exclude correlated data, and can be used to compute the “minimum variance” (Cramèr-Rao bound). The statement that the position variance from [3] is for iterative solution only, not for exact solution makes no sense. If the iterative solution converges, it should not be different from the so-called exact solution, which is also obtained numerically. The commentator would also like to take this opportunity to make one observation and to correct a minor error concerning the result in [2]. The observation is that the Global Positioning System (GPS) navigation is really equivalent to the TDOA geolocation problem, as the difference of two pseudoranges is a TDOA. Therefore results in TDOA geolocation analysis are applicable to GPS navigation and vice versa. The correction is that the surface of the ocean is approximately an oblate spheroid rather than an ellipsoid of revolution. The corresponding geolocation is still given by the solution of a quartic, but not that given by [2, eq. (21)]. BERTRAND T. FANG TASC 12100 Sunset Hills Road Reston, VA 22090 REFERENCES [1] [2] Manuscript received March 24, 1994. IEEE Log No. T-AES/31/1/08033. c 1995 IEEE 0018-9251/95/$10.00 ° 510 [3] Ho, K. C., and Chan, Y. T. (1993) Analysis of geolocation by TDOA. IEEE Transactions on Aerospace and Electronic Systems, 29, 4 (Oct. 1993), 1311—1322. Fang, B. T. (1990) Simple solutions for hyperbolic and related position fixes. IEEE Transactions on Aerospace and Electronic Systems, 26, 5 (Sept. 1990), 748—753. Torrieri, D. J. (1984) Statistical theory of passive location systems. IEEE Transactions on Aerospace and Electronic Systems, AES-20, 2 (Mar. 1984), 183—198. IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 31, NO. 1 JANUARY 1995 Authorized licensed use limited to: Apple. Downloaded on November 06,2023 at 14:37:57 UTC from IEEE Xplore. Restrictions apply.