BAYERO UNIVERSITY, KANO
DEPARTMENT OF MECHANICAL ENGINEERING
MEC4302: Mechanics of Machines II (Theory of Vibrations)
Lecture notes by Professor. Abdullahi A. Adamu
1.0 INTRODUCTION
When the forces on an individual part are such that the displacement of the mass center
of the part is oscillating or periodically reversing in sense, it is said to be vibrating.
Vibration is inherent in all machines because of the motion of the individual parts which
rotate, oscillate, or reciprocate. The reciprocating motion of the piston of the slidercrank mechanism is a simple example of vibration. A more complex motion is the
displacement of the mass center of the connection rod of the slider crank, which
periodically reverses in two coordinate directions; in addition, the connecting rod
undergoes reversing angular displacements. On the other hand, a rotor with mass centre
at the axis of rotation theoretically does not vibrate. However, if the mass centre of the
rotor is even slightly eccentric with the axis of rotation, vibration occurs; the mass
centre moves on a circular path with coordinate displacements having simple harmonic
motion.
The degree to which vibration is undesirable depends on how highly the parts are
stressed because of the vibration or on the disturbance caused by the shaking.
Disturbance here might mean lack of riding comfort, as in vehicles, or lack of
steadiness, as in an airplane camera mounting.
There are two general classes of vibrations - free and forced. Free vibration takes place
when a system oscillates under the action of forces inherent in the system itself, and
when external impressed forces are absent. The system under free vibration will vibrate
at one or more of its natural frequencies, which are properties of the dynamic system
established by its mass and stiffness distribution.
Vibration that takes place under the excitation of external forces is called forced
vibration. When the excitation is oscillatory, the system is forced to vibrate at the
excitation frequency. If the frequency of excitation coincides with one of the natural
frequencies of the system, a condition of resonance is encountered, and dangerously
large oscillations may result. The failure of major structures such as bridges, buildings,
or airplane wings is an awesome possibility under resonance. Thus, herein lies the
importance of the calculation of the natural frequencies of major importance in the
study of vibrations.
The process of utilizing frictional force – which opposes motion in the sense that it is
opposite to velocity – to reduce the amplitudes of vibration in forced vibrations is called
damping. Friction here may appear as the viscous resistance of fluids, as the sliding
resistance of dry materials in contact, or as internal shearing resistance of the plastic
flow of materials as is evident in the hysteresis loop of stress-strain diagrams. Shock
absorbers used in automobiles and aircrafts are devices utilizing the frictional resistance
of fluids to damp vibrations. Commercial spring mounts are made of materials such as
rubber, fibres, and cork to utilize the large internal frictional resistance.
Vibrating systems are all subject to damping to some degree because energy is
dissipated by friction and other resistances. If the damping is small, it has very little
influence on the natural frequencies of the system, and hence the calculations for the
natural frequencies are generally made on the basis of no damping. On the other hand,
damping is of great importance in limiting the amplitude of oscillation at resonance.
The number of independent coordinates required to describe the motion of a
system is called degrees of freedom of the system. Thus, a free particle undergoing
1
general motion in space will have three degrees of freedom, and a rigid body will have
six degrees of freedom, i.e., three components of position and three angles defining its
orientation. Furthermore, a continuous elastic body will require an infinite number of
coordinates (three for each point on the body) to describe its motion; hence, its degrees
of freedom must be infinite. However, in many cases, parts of such bodies may be
assumed to be rigid, and the system may be considered to be dynamically equivalent to
one having finite degrees of freedom. In fact, a surprisingly large number of vibration
problems can be treated with sufficient accuracy by reducing the system to one having a
few degrees of freedom.
2.0 FREE VIBRATIONS
2.1 Harmonic Motion
Oscillatory motion may repeat itself regularly, as in the balance wheel of a watch, or
display considerable irregularity, as in earthquakes. When the motion is repeated in
equal intervals of time T, it is called periodic motion. The repetition time tp is called the
period of the oscillation, and is given by
2
tp =
_____________ (2.1).
Its reciprocal,
n = 1 t p ___________ (2.2),
is called the frequency. If the motion is designated by the time function x(tp), then any
periodic motion must satisfy the relationship
x(t p ) = x(t p + T ) ________ (2.3)
Harmonic motion is often represented as the projection on a straight line of a point that
is moving on a circle at constant speed, as shown in Fig. 1. With the angular speed of
the line o-p designated by ω, the displacement x can be written as
__________ (2.4)
C
x
a
D
Figure 2.1: Harmonic Motion as a Projection of a Point Moving on a Circle
The quantity ω is generally measured in radians per second, and is referred to as the
angular frequency. Because the motion repeats itself in 2π radians, we have the
relationship:
2
=
2
= 2n ___________ (2.5)
tp
where tp and n are the period and frequency of the harmonic motion, usually measured
in seconds and cycles per second (or Hertz), respectively.
The velocity and acceleration of harmonic motion can be simply determined by
differentiation of equation. (2.4). Using the dot notation for the derivative, we obtain
x = A cost p = A sin (t p + 2) __________ (2.6a)
i.e.
x = A 2 − x 2 __________ (2.6b),
and the maximum velocity, at x = 0, is
x max = A ______________ (2.6c).
Also,
x = − 2 A sin t p = 2 A sin (t p + ) _________ (2.7a),
i.e.
and, at ω = π/2,
x = 2 x ____________ (2.7b),
xmax = 2 A _________ (2.7c).
Thus, the acceleration of P is proportional to its displacement from the origin O
and is always directed towards it. Hence, P moves with a simple harmonic motion
(SHM).
2
f
From (2.1), t p =
, but from (2.7b), 2 = , where f = x ,
x
x
displacement
___________ (2.8)
t p = 2
= 2
f
acceleration
For angular analysis we simply substitute the corresponding angular quantities
into the equations derived for the corresponding linear cases. Thus, for angular SHM,
similar equations apply and if φ, θ, Ω, and α are, respectively, the amplitude of motion,
the angular displacement, the angular velocity, and the angular acceleration, then
= 2 − 2 __________ (2.9a);
max = ___________ (2.9b);
= 2 __________ (2.10a);
max = 2 ________(2.10b);
________(2.11); and
1
n=
_________(2.12).
2
t p = 2
3
2.2 Vibration Model: Linear and Angular
The basic vibration model of a simple oscillatory system consists of a mass, a
massless spring, and a damper. The spring supporting the mass is assumed to be of
negligible mass. Its force-deflection relationship is considered to be linear, following
Hooke's law,
F = Sx ___________ (2.13),
where the stiffness S is measured in newtons/metre. Then for undamped vibration,
Sx = mf ,
x m
=
f
S
i.e.
t p = 2
= 2
Hence,
n=
1
2
g
m
S
(from earlier equations)
,
where δ = static deflection under mass.
g
1
2
,
(since
g
2
1 ).
If I, and q are the moment of inertia and the torsional stiffness of the system, then the
angular acceleration of the body when released is given by
q = I ,
i.e.
I
= ,
q
t p = 2
n=
1
2
and hence,
I
, so that
q
q
I
2.3 Equation of Motion: natural Frequency
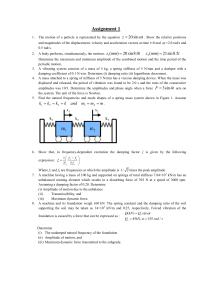
Figure 2 shows a simple undamped spring-mass system, which is assumed to
move only along the vertical direction. It has one degree of freedom (DOF), because its
motion is described by a single coordinate x.
4
When placed into motion, oscillation will take place at the natural frequency nn
which is a property of the system. We now examine some of the basic concepts
associated with the free vibration of systems with one degree of freedom.
S(δ + x)
Sδ
S
Unstretched
position
δ
x
m
m
Static equilibrium
position
m
W
x
x
mg
Figure 2.2: Undamped Free Vibration Model
Newton's second law is the first basis for examining the motion of the system.
As shown in Fig. 2.2, the deformation of the spring in the static equilibrium position is
δ, and the spring force Sδ is equal to the gravitational force w acting on mass m
S = W = mg _____________ (2.14)
By measuring the displacement x from the static equilibrium position, the forces acting
on m are S(δ + x) and W. With x chosen to be positive in the downward direction, all
quantities - force, velocity, and acceleration are also positive in the downward direction.
We now apply Newton's second law of motion to the mass m:
mx = F = W − S ( + x) ____________ (2.15)
and because Sδ = w, we obtain :
mx = −Sx _____________ (2.16).
It is evident that the choice of the static equilibrium position as reference for x
has eliminated W, the force due to gravity, and the static spring force SΔ from the
equation of motion, and the resultant force on m is simply the spring force due to the
displacement x.
By defining the circular frequency ωn by the equation
n2 =
S
___________ (2.17)
m
Eqn. 16 can be written as
5
x + n 2 x = 0 ___________ (2.18)
and we conclude that the motion is harmonic. Equation (2.18), a homogeneous second
order linear differential equation, has the following general solution:
x = A sin n t + B cos n t _________ (2.19)
where A and B are the two necessary constants. These constants are evaluated from the
initial conditions:
dx
= 0 , – which are the conditions when P
dt
coincides with D in Fig. 2.1 – from which A = 0, B = a, and hence,
at x = a, when t = 0, and
Equation (2.19) can be shown to reduce to
x = a cos n t ___________ (2.20).
Differentiating twice,
v = − n a sin n t = n a cos n t + _______ (2.21), and
2
f = − n a cos n t = n a cos( n t + ) _______ (2.22).
2
2
The natural period of the oscillation is established from n t p = 2 , or
t p = 2
m
___________ (2.23)
S
and the natural frequency is
n=
1
1
=
t p 2
S
_________ (2.24).
m
These quantities can also be expressed in terms of the static deflection δ; by
observing Equation (2.14), S = mg . Thus, equation (2.24) can be expressed in terms
of the static deflection Δ as
nn =
1
2
g
____________ (2.25)
Note that tp, n and ωn, depend only on the mass and stiffness of the system,
which are properties of the system.
6
The corresponding equations for angular motion are:
d 2
I 2 = − q ____________ (2.26),
dt
where q is the torsional stiffness of the system and I is the moment of inertia.
d 2
q
2
2
+ n = 0 , where n = .
i.e.
2
I
dt
= A sin n t + B cos n t _____________ (2.27), and
d 2
= 0 when t = 0, then
dt 2
= cos n t __________ (2.28),
from which
= − n sin n t __________ (2.29)
if θ = Φ when t = 0 and when
= − n 2 cos n t ________ (2.30),
where, Ω = angular velocity and α = angular acceleration.
Examples:
Ex 1
Figure E1 below shows a system consisting of two bodies and three springs that
may be set into free vertical vibration. Working from first principles, determine the
natural frequencies of the system and compare the amplitudes of movements of m1 and
m2 for each frequency, given that m1 = 70 kg, m2 = 140 kg, S1 = 60 kN/m, S2 = 45 kN/m
and S3 = 30 kN/m.
Solution:
Let the instantaneous displacements of m1 and m2 be x1 and
x2, respectively. Then the equation of motion for m1 is:
m1 x1 = − S1 x1 + S 2 ( x 2 − x1 ) __________ (1),
and for m2 it is:
m2 x2 = − S 2 ( x2 − x1 ) − S 3 x2 _________ (2)
S1
m1
x1
S2
m2
x2
Assuming a solution of the form: x1 = a1 cos n t and x2 = a 2 cos n t ,
(where a1, a2 are the respective amplitudes of vibration), equations (1) and (2)
become:
− m1 a1 n2 cos n t = − S1 a1 cos n t + S 2 (a 2 cos n t − a1 cos n t )
m1 n2 − (S 2 + S1 ) a1 = − S 2 a 2 _______________(3)
and:
− m2 a 2 n2 cos n t = − S 2 (a 2 cos n t − a1 cos n t ) − S 3 a 2 cos n t
m2 n2 − (S 2 + S 3 ) a 2 = − S 2 a1 _______________(4)
Eliminating a1 and a2 between equations (3) and (4):
m1 n2 − (S1 + S 2 )
S2
=
,
2
S2
m2 n − (S 2 + S 3 )
from which,
7
S3
Fig. E1
S1 + S 2 S 2 + S 3 2 S1 S 2 + S 2 S 3 + S 3 S1
+
= 0.
n +
m2
m1 m2
m1
Substituting the given values,
n4 −
60 + 45 45 + 30
60 45 + 45 30 + 30 60
3
2
6
+
10 n +
10 = 0
140
70 140
70
4
2
n − 2035 n + 597000 = 0
from which, ωn1 = 18.8 rad/s and ωn2 = 40.98 rad/s.
18.87
nn1 =
= 3.0 Hz
2
and nn 2 = 6.52 Hz
From equation (3),
a1
− S2
− 45 10 3
=
=
a 2 m1 n2 − (S1 + S 2 ) 70 n2 − 105 10 3
Hence, for ω1,
a1
= 0.562
a2
a1
= −3.59
and for ω2:
a2
These ratios show that the masses are in phase at the lower (fundamental) frequency and
180º out of phase at the higher frequency.
50 mm
300 mm
Ex 2
C
B
A
n4 −
E
F
350 mm
D
100 mm
Fig. E2
The swinging frame of a balancing machine is shown in figure E2 above. The lever
ACB has a mass of 6 kg and has a radius of gyration of 75 mm about its centre of
gravity, which is at the pivot C. The lever FD is of uniform section and has a mass of 1
kg. It carries a mass of 0.75 kg at E. The mass of the connecting link BD may be
8
ignored. The compression springs at A and B are each of stiffness 5.6 kN/m. Determine
the frequency of vibration of the system.
Solution:
IAB about C = mR2 = 6 × (0.075)2 = 0.03375 kgm2.
IFD about F = m1l32/3 + (m2 × l42) = 0.1594 kgm2.
Let ACB be displaced through a small angle θ, and let the force in BD be p, then the
restoring force F1 at A is:
l = 50 +300 = 350 mm
l1 = 50 mm
F1 = Sx = Sl1sinθ ≈ Sl1θ
l2 = 300 mm
= 5.6 × 103 × 0.05θ
l3 = 100 + 350 mm
F1
= 280θ N
l4 = 350 mm
θ
Similarly, restoring force at B is
θ
F2 = Sl2sinθ – p = Sl2θ – p
x
= (1680θ – p) N
From the restoring moments, the equation of motion is:
F1l1 + F2l2 = Iα
→
(280θ)0.05 + (1680θ – p)0.3 = 0.03375α
518θ – 0.3p = 0.03375α _______________ (I)
F2
p
I
F1l1
l1
l2
For FD, the equation of motion is:
0.45p = 0.1594ά ___________________ (II)
Since the linear accelerations must be equal at B and at D, then
0.3α = 0.45ά
i.e.
ά = (2/3)α
substituting this into equation (II) gives
p = 0.236α
and into (I) gives
518θ – 0.3(0.236)α = 0.03375α
from which
= 4954 .57 .
Therefore,
n=
1
2
4954 .57 = 11.2 Hz
3.0 VISCOUSLY DAMPED FREE VIBRATION
3.1 Damping
When a vibrating system is subjected to a damping force, the force may be due
to ether viscous friction (as symbolized by a dash-pot), in which the resistance is
assumed to be proportional to the velocity, or the damping force may be due to friction
9
F2l2
between dry surfaces – called Coulomb friction damping – and the resistance is
assumed to be independent of the velocity.
3.2 Equations of Damped-free Vibration
Viscous damping force is expressed by the equation
Fd = cx ______________ (3.1)
where c is a constant of proportionality.
Symbolically, it is designated by a dashpot, as shown in Fig. 3.1 From the free
body diagram, the equation of motion is seen to be
mx + cx + Sx = F (t ) ________ (3.2)
The solution of this equation has two parts. If F(t) = 0, we have the
homogeneous differential equation whose solution corresponds physically to that of
free-damped vibration. With F(t)=0, we obtain the particular solution that is due to the
excitation irrespective of the homogeneous solution. We will first examine the
homogeneous e1quation that will give us some understanding of the role of damping.
δS
c
S
cx
Sx
δ
m
m
x
m
W
F(t)
Figure 3: Viscously Damped Free Vibration
With the homogeneous equation :
mx + cx + Sx = 0 ________________ (3.3)
the traditional approach is to assume a solution of the form :
x = e st __________ (3.4)
where s is a constant. Upon substitution into the differential equation, we obtain :
(ms2 + cs + S )e st = 0
10
which is satisfied for all values of t when
s2 +
c
S
s + = 0 ________________ (3.5)
m
m
Equation (3.5), which is known as the characteristic equation, has two roots :
2
s1, 2
c
S
c
=−
______________ (3.6)
−
2m
2m m
Hence, the general solution is given by the equation:
x = Ae s1t + Be s2t _____________ (3.7)
where A and B are constants to be evaluated from the initial conditions x(0) = 0 and
x (0) = 0 , respectively.
Equation (3.6) substituted into (3.7) gives:
x = e − ( c / 2 m )t Ae
(c / 2 m )2 − S / m t
+ Be
−
(c / 2 m )2 − S / m t
____________ (3.8)
The first term, e−( c / 2m)t , is simply an exponentially decaying function of time. The
behavior of the terms in the parentheses, however, depends on whether the numerical
value within the radical is positive, zero, or negative.
When the damping term (c/2m)2 is larger than S/m, the exponents in the previous
equation are real numbers and no oscillations are possible. We refer to this case as
overdamped.
When the damping term (c/2m)2 is less than S/m, the exponent becomes an imaginary
number, i S / m − (c / 2m) 2 t . Because
e
S / m − ( c / 2 m ) 2 t
2
2
S c
S c
= cos
− t i sin
−
t
m m
m 2m
the terms of Eq. (3.8) within the parentheses are oscillatory. We refer to this case as
underdamped.
In the limiting case between the oscillatory and non oscillatory motion (c / 2m) = S / m ,
and the radical is zero. The damping corresponding to this case is called critical
damping, cc.
2
c c = 2m
S
= 2m n = 2 Sm _________________ (3.9)
m
11
Any damping can then be expressed in terms of the critical damping by a non
dimensional number ζ, called the damping ratio:
c
_______________ (3.10)
=
cc
and
c
c
= c = n _____________ (3.11)
2m
2m
When ζ < 1.0, the system is underdamped and motion is oscillatory; when ζ > 1.0, the
system is overdamped and motion is non oscillatory; and when ζ = 1.0, the system is
critically damped.
3.3 Ratio of Amplitudes of Damped-free Vibrations
c
S
Let =
and since n2 = then
2m
m
2
tp =
___________ (3.12), and
( n2 − 2 )
1
n2 − 2 _________ (3.13).
2
If a1 and ar are the first and rth amplitudes on the same side of the equilibrium
position, and then measuring time from the point p (figure 3.2) so that t = 0 when x = a1
and t = (r – 1)tp when x = ar, then it can be shown that
a1
( r −1)t p
=e
___________ (3.14), and
ar
the ratio of successive amplitudes is eμtp, or
a
2
__________ (3.15).
log e 1 = t p =
2
2
a2
n −
n=
The term
2
is referred to as the logarithmic decrement.
n2 − 2
When μ < ωn, the damping is described as light. This is the case which most
commonly arises in engineering problems and usually μ is so small in comparison with
ωn that the periodic time approximates very closely to 2π/ωn.
3.4 Angular Vibrations with Viscous Damping
The corresponding equation of motion of damped angular vibration is
I + c + q = 0 ___________ (3.16),
where I = moment of inertia, c = damping torque per unit angular velocity, and q
= restoring torque per unit angular displacement. Equation (3.16) can be written as
+ 2 + 2 = 0 __________ (3.17),
where μ = c/(2I) and ω = q/I.
The solution of this equation is exactly as for linear vibrations, and when μ<ω,
n=
1
n2 − 2 __________ (3.18), and
2
1
( r −1)t
=e
__________ (3.19),
r
where = Φ1 and Φr are the first and rth amplitudes.
p
12
Ex.1 Obtain the equation of motion, and its solution, for the vibration of a body of mass
m when acted on by a restoring force S per unit displacement from the position of static
equilibrium, and subjected to a damping force of c per unit velocity.
Given m = 14 kg and S = 8.4 kN/m, and that the amplitude of the vibration
diminishes to one-tenth of its original value in 2 complete vibrations, find the frequency
of vibration and the value of the damping force c.
Solution:
The firs part of the question has been answered in the preceding section, i.e.
from section 3.2 up to equation (3.8).
1
Given that a 2 = a1 ,
10
a1
t
= e p = 10
a2
t p = log e 10
and =
2.303
______________ (I)
tp
tp =
From
2
2
tp =
2
(
2.303)
−
2
n
tp
we have:
2 = t p n2 −
i.e.
tp =
and
n=
4 2 + 5.3
n2
and from (I),
n2 − 2
=
2
5.3
tp
2
= n2 t p − 5.3
2
(4 2 + 5.3)m
= 0.273s
S
1
= 3.66 Hz .
tp
Now,
c
2m
c = 2m
=
but from (I), =
2.303
= 8.436
0.273
c = (2)(14)(8.436) = 236.21 Ns/m
13
4.0 FORCED (UNDAMPED) VIBRATION
Machine elements that are connected to or is part of any rotating or moving
machinery are often subjected to forces that may act periodically with time or in the
form of harmonic forcing. This is to say that a machine element or a system may
experience external forcing which may be periodic or harmonic and as such be
subjected to both its own natural frequency ωn, and forcing frequency, ω.
4.1 Response due to Harmonic Forcing
Consider figure 4, showing a mass and spring system in which the mass is acted
upon by a harmonically varying force, F = P cost . The equation of motion is:
mx + Sx = P cost . _____________ (4.1)
Applying the methods of solution of differential
equations, the equation of displacement is:
x=−
(
P cos n t
S 1 − n
2
2
+
P cost
) S (1 −
2
n
2
)
S
____ (4.2)
F = P cost
m
x
The first term on the right-hand side of the
Fig. 4: Model of undamped
above equation is called the starting transient and is
forced vibration
the vibration at the natural frequency ωn and not the
system.
forcing one ω. The usual physical system would contain
a certain amount of friction which would then cause this term to die out after a certain
period of time. The second term represents the steady state solution, which remains in
the system for as long as F acts.
Thus, for a harmonic motion of frequency f and amplitude X, these quantities
are:
n=
n
2
and
X =
(
P
S 1 − 2 n
2
) _____________ (4.3)
Resonant conditions are given by ω = ωn.
4.2 Response due to Periodic Forcing (or due to Periodic movement of support)
Consider figure 4.2 (a), in which the body is subjected to a disturbing force due
to the movement of the spring support (rather than a force applied directly to the body)
or figure (b), which is a roller riding in the groove of a face cam. Then the equation of
motion is
mx + Sx = Sy sin t
It can be shown that the complete general solution is:
y sin n t
y sin t
x=−
+
_____________ (4.4)
2
2
n (1 − n ) (1 − ( 2 n2 ))
h = y sin t
h
=
y
sin
t
As before, the first term on the RHS
of equation (4.4) is the starting
transient, while the second is the
S
S
steady-state solution
ω
m x
m
Forced vibration can also be
(b)
(a)
induced by rotating imbalance (home
work: read about it). For such cases, the
Fig. 4: (a) Periodic movement of support,
(b) Periodic forcing.
14
steady-state solution is given by:
me 2 cost
________ (4.5),
x=
S (1 − 2 n2 )
where e is the eccentricity of the imbalanced mass m from the centre of the entire mass
M.
4.3 Forced (undamped) Angular (or Torsional) Vibrations
The corresponding equations of motion and angular
displacement for forced angular vibration, in which the body is
subjected to an external harmonic torque T = T0 cosωt
q
(figure 4.2) is given by
T = T0 cost
q T
+ = cost ________ (4.6),
I I
from which
I
T cos n t
T cost
Fig. 4.2: Force torsional
=−
+
_____ (4.7),
q (1 − 2 n2 ) q (1 − 2 n2 )
vibration
4.4 Magnification Factor, MF (or Dynamic Amplifier)
This is the factor by which the amplitude X of forced vibration is
increased/decreased due to the application of an externally applied varying force of
amplitude X´. For a harmonically varying force,
MF =
X
X
1
=
=
_____________ (4.8)
X P / S 1 − 2 n 2
(
)
Examples
Ex. 1
The 4450 N vehicle shown in figure E2 travels along a rough road at 26.8 m/s.
The sine curve representing the rough road has amplitude of 25.4 mm and a wave length
of 6.09 m. Determine (a) the spring constant S such that 26.8 m/s is the critical speed at
which resonance occurs; (b) the dynamic amplifier and the spring constant to give a
vibration amplitude of 6.36 mm of the vehicle at 26.8 m/s, if it is known from charts
that ω/ωn for this situation is 2.2; and (c) whether a rider in the vehicle would leave his
seat under condition(b). (Neglect any damping effects).
Solution:
a) At 26.8 m/s, the frequency is:
n = v / λ = 26.8 / 6.09 = 4.40 Hz
Now, ω = 2πn = 27.65 rad/s.
Also, at resonance, ωn2 = ω2.
S Sg
n2 = =
m W
Sg
= 2 = (27.65) 2
But
W
Fig. E2
(
27.65 )2 W
S =
= 346801 .75 N / m
6.09 m
g
b)
Now, MF = X / X' = (6.36) / (25.4) = 0.25.
Since ω/ωn = 2.2,
25.4 mm
15
n =
2.2
Sg 27.65
=
W
2.2
from which, S = 71653 .25 N/m
c)
The particular solution to the equation of motion gives:
x = X sin t ,
from which,
x = − X 2 sin t , the maximum absolute value of which is:
(x)mx = X 2 = 6.36 10 −3 (27.65)2 = 4.86 m / s 2 .
Hence, since x = 4.86m / s 2 is less then g (= 9.81 m/s2), the rider will not leave
his seat.
Notice that in this example, a relatively soft spring (S = 71,653 N/m compared
to S = 346, 802 N/m) gives a more comfortable ride. It should also be noted that, to
realize ω/ωn = 2.2 at 26.8 m/s, the vehicle must pass through the critical speed given by
ω/ωn = 1.0, which is at a speed less than 26.8 m/s. However, with damping devices like
shock absorbers, critical speeds may be passed through with relatively small vehicle
vibrations. Further, it is also noted that the static deflection δ, of the spring due to the
vehicle weight is W/S = 4450/71653 = 62.1 mm, and that the spring deflection during
vibration at 26.8 m/s varies between 62.1 + 6.36 mm and 62.1 – 6.36 mm (i.e. 62.1 ±
6.36 mm).
Ex. 2
A small model of a horizontal single-cylinder reciprocating engine is suspended
by vertical flexible cords from an overhead support, so that the model is free to swing as
a pendulum. The length of each cord is 750 mm. The mass of the model is 5 kg, the
reciprocating mass is 0.8 kg, the crank radius is 20 mm and the length of the connecting
rod is 80 mm. The crankshaft is rotated at 60 rpm and the model begins to oscillate
under the effect of the inertia of its reciprocating parts. Calculate the amplitude o forced
oscillations set up (a) by the primary inertia force, and (b) by the secondary force. State
also, the travel of the model in each swing of the combined oscillation.
Solution:
Suppose that the model is displaced
through a small angle Φ when the crank has
turned through an angle θ from the inner dead
centre, figure E3, then the inertia force P on the
reciprocating parts is:
r
P = m 2 r cos + cos 2
l
20
120
= 0.8
cos 2
0.02 cos +
80
60
the primary inertia force PP is :
2
16
O
Φ
O
ω rad/s
l
θ
Fig. E3
PP = 0.632 cos __________ (a);
and the secondary inertia force PS is
PS = 0.158 cos 2 __________ (b).
Now, the moment of inertia of the model about the support O is: I0 = ml2,
and the moment of the force exerted due to inertia is
2
2 d
ml
,
dt 2
and the moment of the restoring force is
mgl sinΦ = mglΦ, assuming Φ to be small.
Also, the moment of the force inducing vibration is P0l cosωt. Hence the equation of
motion is:
d 2
ml 2 2 + mgl = P0 l cost
dt
P
g
+ n2 = 0 cost , where n2 = .
ml
l
Therefore, the amplitude of forced vibration Φ, is
P0
=
.
ml ( n2 − 2 )
For primary inertia force, the amplitude is:
P =
0.632
= 0.00638 rad.
9.81 120 2
5 0.75
−
0.75 60
Amplitude of horizontal motion due to primary inertia force is:
hP = l tan P = l P = 750 0.00638 = 4.785 mm
For secondary inertia force, the amplitude is:
S =
0.158
= 0.0002905 rad.
9.81 240 2
5 0.75
−
0.75 60
Amplitude of horizontal motion due to secondary inertia force is:
hS = l tan S = l S = 750 0.0002905 = 0.218 mm.
Hence, total horizontal movement or travel of the engine is:
x = 4.785 cosθ + 0.218 cos2θ
and, at θ = 0, 2π, etc,
0
x = 4.785 + 0.218 = 5.003 mm
i.e. amplitude of combined motion (figure E3.1) is 5.003 mm.
17
π
Fig. E3.1
2π
5.0 FORCED-DAMPED VIBRATION
Harmonic excitation is often encountered in engineering systems. It is
commonly produced by the unbalance in rotating machinery. Although pure harmonic
excitation is less likely to occur than periodic or other types of excitation, understanding
the behavior of a system undergoing harmonic excitation is essential in order to
comprehend how the system will respond to more general types of excitation. Harmonic
excitation may be in the form of a force or displacement of some point in the system.
5.1 Forced-Damped Harmonic Vibration
We will first consider a single DOF system with viscous damping, excited by a
harmonic force F0 sin t , as shown in Figure 5.1. Its differential equation of motion is
found from the free-body diagram.
mx + cx + Sx = F0 sin t _____________ (5.1)
c
S
cx
Sx
Fig. 5.1: Model of forced, damped
vibration system.
m
x
m
F = F0 sin ωt
F = F0 sin ωt
The solution to this equation consists of two parts, the complementary function, which
is the solution of the homogeneous equation, and the particular integrand. The
complementary function. in this case, is a damped free vibration.
The particular solution to the preceding equation is a steady-state oscillation of the same
frequency ω as that of the excitation. We can assume the particular solution to be of the
form :
x = X sin(t − ) ___________ (5.2)
where X is the amplitude of oscillation and Φ is the phase of the displacement with
respect to the exciting force.
The amplitude and phase in the previous equation are found by substituting equation
(5.2) into the differential eqn (5.1). Remembering that in harmonic motion the phases of
18
the velocity and acceleration are ahead of the displacement by 90 and 180, respectively,
the terms of the differential equation can also be displayed graphically, as in figure 5.2.
mω2X
cωX
F0
X SX
φ
Reference
Fig. 5.2: Vector Relationship for Forced Vibration with Damping
It is easily seen from this diagram that
X =
F0
(S − m ) + (c )
2 2
____________ (5.3)
2
and
= tan −1
c
_________________ (5.4)
S − m 2
We now express equations (5.3) and (5.4) in non-dimensional term that enables a
concise graphical presentation of these results. Dividing the numerator and denominator
of equations (5.3) and (5.4) by S, we obtain:
F0
S
X =
___________ (5.5)
m 2
1 −
S
2
c
+
S
2
and
c
S
_______________ (5.6)
tan =
m 2
1−
S
The non-dimensional expressions for the amplitude and phase then become
XS
1
_______________ (5.7)
=
2
2
F0
2
1 − + 2
n
n
and
2
n _________________ (5.8)
tan =
2
1 −
n
19
5.2 Forced-damped Angular Vibrations
The corresponding equation of motion for
forced-damped angular vibrations, in which a body is
subjected to an external harmonic
q
T cos ωt
I
torque T cos ωt, figure 5.3 is
c
I + c + q = T cost
T
cost __________ (5.9),
I
Fig. 5.3: Forced-damped angular
c
q
2
excitation
where 2 = and n =
I
I
The solution to eqn (5.10) is similar to that for linear vibrations and the amplitude is
given by
T
________ (5.10).
=
2
2 2
2 2
I 4 + n −
+ 2 + n 2 =
)
(
5.3 Periodic Movement – and Vibration-measuring instruments (the principles of
Accelerometer/Vibrometer)
If the vibration is produced by a periodic
movement of the support, figure 5.4 (a), such that the
displacement of the support is y = h cost , the equation of motion is
mx + cx + S ( x − y) = 0
x + 2x + n 2 x = n 2 h cost ______________ (5.11)
i.e.
y
y
S
S
m
x
m
c
x
c
(b)
(a)
Fig. 5.4: (a) Periodic movement of support; and
(b) dash-pot attached to moving support.
The solution of eqn (5.11) is the same as earlier and
20
X =
4
2
n 2 h
2
(
+ n −
2
)
2 2
________________ (5.12).
If the ‘fixed’ member of the dash-pot is attached to the moving support as in
figure 5.4(b), the damping is proportional to the relative velocity between the mass and
the support.
The equation of motion then becomes
mx + c( x − y ) + S ( x − y) = 0 ________________ (5.13).
If the relative displacement between the mass and the support is z, then
x – y = z, and
x − y = z
x − y = z
and eqn (5.13) can therefore be written as
m( z + y) + cz + Sz = 0
mz + cz + Sz = −my = m 2 h cost
z + 2z + n 2 z = 2 h cost ____________ (5.14).
Equation (5.14) is similar to eqn (5.11), but the amplitude obtained from
equation (5.14) is that of the relative motion. The amplitude of the absolute motion of m
must be obtained from a vector diagram, since the motions of the mass and the support
are not in the same phase.
Similar equations may be deduced for the angular motion.
It can be shown that the amplitude of the relative movement is:
h( 2 n2 )
h( 2 n2 )
Z=
=
__________ (5.15)
2
2
2 2
2
(1 − n ) + 4 ( 2 n )
(1 − 2 n2 )2 + cS
This result is made use of in a seismic vibrometer, in which the seismic mass is
spring-mounted inside a rigid case. When the case is attached to the vibration being
measured, the relative movement z of the seismic mass is recorded (either by
mechanical or electrical means) and hence the frequency and amplitude of the main
vibration h is determined.
For ω / ωn < 0.7 and ξ = 0.67, equation (5.15) reduces to:
Z ≈ constant × h,
so that an instrument which records Z measures a quantity proportional to the maximum
acceleration of the vibratrion h cosωt. This type of instrument (measuring vibrations
with frequencies below its own natural frequency is called an accelerometer.
5.4 Rotating Unbalance
Unbalance in rotating machines is a common source of vibration excitation. We
consider here a spring-mass system constrained to move in the vertical direction and
excited by a rotating machine that is unbalanced, as shown in figure 5.5. The unbalance
is represented by an eccentric mass m with eccentricity e that is rotating with angular
21
velocity ω. By letting x be the displacement of the non-rotating mass (M - m) from the
static equilibrium position, the displacement of m is:
Fig. 5.5: Harmonic Disturbing Force Resulting from Rotating Unbalance
The equation of motion is then:
( M − m) x + m
d2
( x + e sin t ) = − Sx − cx ________________ (5.16),
dt 2
which can be rearranged to:
Mx + cx + Sx = (me 2 ) sin t _____________ (5.17).
It is evident that this equation is identical to equation (5.1), where
is replaced by
, and hence the steady-state solution of the previous section can be replaced by :
_________________ (5.18)
and
________________ (5.19)
These can be further reduced to non dimensional form :
22
______ (5.20)
and
______________ (5.21).
5.5 Force Transmitted to the Foundation and Transmissibility
The discussions up to this point will enable the engineer to design mechanical
equipment so as to minimize vibration and other dynamical problems, but, because machines
are inherently vibration generators, in many cases it will be impractical to eliminate all such
motion. In such cases, more practical and economical approach is to reduce to the barest
minimum the annoyance the motion causes. The problems could be how to eliminate the
residuals – after eliminating as much as possible the vibrations – which will still be strong
enough and so cause objectionable noise by transmitting these vibrations to the base structure,
or an item of equipment such as a computer monitor, which is not in itself a vibration generator,
may receive objectionable vibrations from another source. Both of these problems can be
solved by isolating the equipment from the support. In analyzing these problems therefore, we
may be interested in the isolation of forces or in the isolation of motions. To effectively do this
we may want to estimate the amount of force that is transmitted to the foundation or base
structure.
In figure 5.6, the forces acting against the support must be transmitted through
the spring and dashpot because these are the only connections. Now, the spring and
damping forces are phasors which are always at right angles to each other (figure 5.2).
In figure 5.2, the diagonal line shown dotted is the vector sum of the spring and damper
forces, so that the force transmitted to the foundation is:
Ftr =
(SX )
2
+ (c )
2
2
2
__________________ (5.22).
= SX 1 +
n
23
x
x
F0 cost or
m
m
me cost
2
c
c
S
y = y 0 cost
S
(b)
(a)
Figure 5.6: Isolation of vibration:
(a) Harmonic forcing or rotating imbalance;
and (b) Periodic movement of support
The transmissibility T is a non-dimensional ratio that defines the percentage of
the exciting force transmitted to the frame. For the system of figure 5.6, T is given by:
F
X
T = tr =
=
F0
y0
1 + (2 n )
2
_____________
2
n2 ) + (2 n )2
harmonic forcing and periodic movement of support), and
F S
T = tr
=
em M
1 − (
( ) 1 + (2 )
1 − ( ) + (2 )
2
2 2
n
2
n
2
(5.23),
(for
2
2
n
2
2 2
n
___(5.24), (for rotating imbalance).
Examples:
Ex1: A four-cylinder in-line engine with cranks at 180° has a total mass of 200 kg. The
reciprocating parts for each cylinder have a mass of 1.5 kg, the connecting rod is 200
mm between centers and the crank 50 mm. The engine mounting deflects 4 mm under
the static load, and the vibrational amplitude when running at 600 rpm is 0.1 mm.
Determine the dynamic force transmitted to the mounting, as well as the transmissibility
of the system.
Solution:
The excitation arises from the unbalanced secondary forces, that is:
24
4mr 2
4 1.5 0.05 600 2
1200 2
F=
cos 2t =
t = 296.09 cos125.66 N :
cos
n
4
60
60
2
This represents an excitation of magnitude 296.10 N at a frequency ω = 125.66 rad/s.
200 9.81
= 49.05 10 4 N/m and
0.004
SX = 49.05 10 4 0.1 10 −3 = 49.05 N,
S=
Mg
=
CX = c 125 .7 0.1 10 −3 = 0.0125 c N
m 2 X = 200 (125 .7 ) 0.1 10 −3 = 316 .0 N.
2
Applying these to the vector diagram of figure5.2,
(F0 )2 = (SX − m 2 X )2 + (cX )2
2
2
2
i.e. (296 .1) = (316 − 49.05 ) + (0.01257 c ) ,
from which
c = 10191 .95 Nsm .
-1
From equation (5.9),
Ftr =
(SX )2 + (cX )2
=
(49.05)2 + (0.01257 10191 .95)2
= 137.18 N
Note that Φ = 90°in this example, since ω (= 125.7 rad/s)> ωn (= 49.5 rad/s).
From equation (5.10),
T=
Ftr 137 .18
=
= 0.463 = 46.3 %
F0 296 .10
Ex 2: A counter rotating eccentric weight exciter is used to produce the forced
oscillation of a spring-supported mass as shown in Fig. E5. By varying the speed of
rotation, a resonant amplitude of 0.60 cm was recorded. When the speed of rotation was
increase considerably beyond the resonant frequency, the amplitude appeared to
approach a fixed value of 0.08 cm. Determine the damping factor of the system.
25
Fig. E5
Solution: From Eqn. (5.5), and the resonant amplitude is :
When ω is very much greater than
, the same equation becomes
By solving the two equations simultaneously, the damping factor of the system is
Ex. 3: A machine of mass 1000 kg is supported on springs which deflect 8 mm under
the static load. With negligible damping the machine vibrates with an amplitude of 5
mm when subjected to a vertical disturbing force of the form Fcosωt at 0.8 of the
resonant frequency. When a damper is fitted it is found that the resonant amplitude is 2
mm. Find the magnitude of the disturbing force and the damping coefficient.
Solution:
S = mg = (1000 9.81) / 0.008 = 1.22 10 6 Nm −1 ,
9.81
= 35.02 rad/s
0.008
With zero-damping, equation (5.5) reduces to
F S
X =
, same as equation (4.14)
1 − 2 n2
n =
g
=
0.05 =
F 1.226 10 6
, from which,
2
1 - (0.8)
F = 2206.80 N
With damping and at ω = ωn, equation (5.5) becomes:
F S
F S
X =
=
2
2
2
2
1 − 2 + 2
n n
F
2206 .80
=
=
= 0.45
2 SX (2 ) 1.226 10 6 (0.002 )
But from the relation cc = 2mωn and ξ = c/cc,
c
=
and hence,
2m n
(
)
c = 2m n = 2(0.45 )(1000 )(35 ) = 31500 Nsm -1 .
26
6.0 MULTI-DEGREES OF FREEDOM SYSTEMS
6.1 The Principles of Vibration Absorber
Consider the two-degrees-of-freedom forced vibration system of figure 6.1
below. A plot of (F0/S1) and (F0/S2) against the entire frequency range (ωn1, ωn2, etc)
shows that when = (S 2 m2 ) = n 2 , the amplitude
x2
m2
of vibration of m1 is zero. This property can be utilized
to suppress the vibration of m1 at a particular forcing
F = F0 cost
S2
frequency and is known as the principle of the vibration
absorber. Thus, if a single-degree-of-freedom system (e.g.
m1
m1, S1) is subjected to a harmonic excitation, the resulting
x1
vibration can be nullified by attaching to the main system
S1
a secondary system (e.g. m2, S2) such that the natural frequency
of the second system on its own ( (S 2 m2 ) = n 2 ) is equal to the
Fig. 6.1
forcing frequency ω. This second system is called a dynamic
vibration absorber.
The physical explanation is that, in the steady state, the motion is such that the
force in the spring S2 is always equal and opposite to the excitation, so m1 remains
stationary. However, this simple type of absorber is only effective at one frequency
(usually chosen to be the resonant frequency of the main system), and by introducing a
second degree of freedom two new resonant frequencies arise. If damping is added to
the absorber system a compromise solution is obtained which restricts the amplitude of
the main mass over a wide frequency range (including the resonant frequencies) by no
longer passes through zero value.
6.2 Two-degrees-of-freedom Torsional Vibrations
Consider the three-inertia system of figure 6.2. The equations of motion are:
I 11 = q1 ( 2 − 1 ) _____________ (6.1a),
I 22 = −q1 ( 2 − 1 ) + q2 ( 3 − 1 ) ________ (6.1b), and
I = −q ( − ) ___________ (6.1c).
3 3
2
3
2
It can be shown from these equations that:
− I1n21 = q1 (2 − 1 ) ________ (6.1d)
θ2
θ2
θ1
− I 2n22 = −q1 (2 − 1 ) + q2 (3 − 2 ) ____ (6.1e)
− I 3 = −q2 (3 − 2 ) _____ (6.1f)
The relationship between the three amplitudes
can be shown to be:
q1 2
1 =
_______(6.2a)
q1 − I 1 n2
q2
q1
2
n 3
I3
I2
I1
Fig. 6.2
q 2 2
_______(6.2b).
q 2 - I 3 n2
The frequency equation is:
q q
1
1
1
1
n4 − {q ( + ) + q ( + )} n2 + 1 2 ( I + I + I ) = 0 ______ (6.3)
1 I
2 I
1 2
3
I
I
I I I
1
2
2
3
1 2 3
3 =
6.3 Nodes in Shafts under Torsional Vibrations
27
In two- (or more) inertia cases, because during vibration the shaft is being
wound up first in one direction and then in the other, the inertias at the ends must be
moving in opposite directions (they are said to be anti-phase, i.e. they have a phase
difference of 180º). It their amplitudes are Φ1 and Φ2, then figure 6.3 shows that there is
a point of no twist (called a node) in the shaft, such that:
l1 1
=
_________ (6.4a).
l2 2
It can be shown that:
l1 1 I 1
=
=
________ (6.4b)
l2 2 I 2
Φ1
Node
•
l1
l2
Φ2
l
Fig. 6.3
6.4 Vibrations of Geared Torsional Systems
In order to calculate the natural frequency of a geared system such as in figure
6.4a, it is first necessary to reduce it to an equivalent in-line system as shown in figure
6.4b. If G is the gear ratio between the speed o shaft 1 and shaft 2, then figure 6.4b
shows the values of the equivalent system as if acting in line with shaft 2. It is seen that
where inertia (I) or stiffness (q) has been ‘transferred’, each item has been multiplied by
G2. This is justified on the grounds of equal vibrational energy in the two systems, since
kinetic energy is of the form ½ Iω2 and strain energy is of the form ½ qθ2, both ω and θ
being in the ratio G on opposite sides of the gear reduction.
I2
G2I2 + I3
I1
q1
I4
2
G
I
1
1
G2q1
q2
G
1
2
q2
2
(b)
I3
I4
Figure
6.2 in the last but one section and the same
(a)6.4b now looks like figure
Fig.
6.4the amplitude ratios (equation 6.2) and
procedure could be used to find equations of
frequency (equation 6.3) by simply putting I1 = G2I1,q1 = G2q1, I2 = G2I2 + I3, q2 = q2,
and I3 = I4 into the respective equations to obtain the corresponding equations. For
example, putting these into the equation (6.6) gives the frequency equation of figure 6.4
as follows:
1
1
1
1
n4 − G 2 q1 2 + 2
+ n2
+ q2 2
G I1 G I 2 + I 3
G I 2 + I 3 I 4
__________ (6.5).
G 2 q1 q 2
2
2
G I1 + (G I 2 + I 3 ) + I 4 = 0
+ 2
G I 1 (G 2 I 2 + I 3 )I 4
6.5 Multi-degree-of-freedom Vibrations – the Holzer Method
Although it is possible to extend the analytical method of the preceding sections
to any number of degrees of freedom, the complexity of the computation increases
considerably. In practice, it is usually only the lower natural frequencies (often only the
28
first or ‘fundamental’ mode) that are required, the higher modes being well above the
range of excitation frequencies. Consequently, a more direct method, attributed to
Holzer, which lends itself to numerical computations, is to be preferred. In this method,
illustrated by the example below, an assumed value of natural frequency is taken as a
trial and the mechanics of the system are cheeked against the boundary conditions. The
exact value of the natural frequency is then found by successive iterations.
As an illustration, the six-inertia torsional system of figure 6.5 will be
considered. Let Φ1, Φ2, . . . ,Φ6 be the amplitudes of I1, I2, . . . , I6 in the principal mode
having circular frequency ωn. Then θ1 = Φ1 sinωnt, θ2 = Φ2 sinωnt, . . . and following
equation (6.2) and equations (6.1d) and (6.1e):
2 = 1 − I11n2 / q1 ;
3 = 2
(
− (( I
)
)
+ I 22 )n2 / q2 .
extending this process to the end of the six-inertia system,
I5
I3
I2
I4
I1
q2
q3
q5
q1
q4
1 1
I6
Figure 6.5 Multi-degree of freedom torsional vibration system
6 = 5 − (I11 + I 22 + .... + I 55 )n2 / q1 __________ (6.6).
Now, if I6 is a ‘free’ end, (or following equation (6.1f) then:
− I 66n2 = −q5 (6 − 5 ) ,
and by substitution into equation (6.6),
6
I = 0 ____________ (6.7).
1
(The condition for a ‘fixed’ end would be Φ6 = 0).
In any numerical problem, the application of the appropriate end condition(s)
serve(s) as a check on whether or not the assumed value of frequency coincides with a
principal mode.
Assignment:
Describe Holzer’s method and show that for a system with n-rotors and n-1 shafts;
j = j −1 −
n 2
q (i −1) j
j =1
I .
i =1
i
j
Examples:
Ex. 1: In the system of figure 6.2, suppose that I1 = 100 kgm2, I2 = 150 kgm2, and I3 =
1000 kgm2. The shaft between I1 and I2 is 1 m long and 100 mm diameter, and between
I2 and I3 is 0.6 m long, 50 mm diameter. The modulus of rigidity is 82 000 N/m2.
Determine the natural frequencies of torsional vibrations and the positions of the
node(s) in each case.
29
Solution:
q1 =
Gd14
32l1
(
)
(
)
82000 10 6 100 10 −3
=
32(1)
Gd 24
4
= 805033 .12 Nm / rad
82000 10 6 50 10 −3
q2 =
=
= 83857 .62 Nm / rad
32l 2
32(0.6 )
Substituting into equation (6.3),
1
1 2 (805033 .12 )(83857 .62 )
1
1
(1250 ) = 0
n4 − 805033 .12
+
+
+ 83857 .62
n +
(100 )(150 )(1000 )
100 150
150 1000
4
n4 − 14060 .13 n2 + 5.626 10 6 = 0
from which, ωn2 = 412 or 13650 and ωn = 20.3 or 117 rad/s,
hence, n = 3.23 or 18.6 Hz
Consider the amplitude ratios of equation (6.2b)
3
q2
=
2 q 2 − I 3 n2
3
83857 .62
=
= −0.256,
2 83857 .62 − (1000 )(412 )
i.e. for ωn = 20.3 rad/s.
There will be one node which lies between those inertias that are vibrating in anti-phase:
this node thus lies between I2 and I3, and from figure E6 below,
3 l3
=
2 l2
Φ2
Node
l3
l3 = (3 2 )l 2
•
l2
Φ3
But l2 = l – l3
l = 0.6 m
l3 = (3 2 )(l − l3 )
or,
Fig. E6
( )(l ) 0.256(600 )
l3 = 3 2
=
= 122 .30 mm.
1 + (3 2 )
1.256
i.e. the 1st node is 122.3 mm from I3.
Similarly, Φ1/Φ2 = -1.4375 (equation (6.2a)), at ωn = 117 rad/s. Similarly, Φ2/Φ3
= - 0.0062 (equation (6.2b)), at ωn = 117 rad/s. And by the same proportions as earlier,
the other nodes are 590 mm from I1 and 3.7 mm from I3.
Ex. 2: Figure 6.5 represents a four-cylinder engine and flywheel driving a load, and the
effective values of inertia and torsional stiffness are I1 = I2 = I3 = I4 = 60 kgm2, I5 = 700
kgm2, I6 = 300 kgm2, q1 = q2 = q3 = 15 × 106 Nm/rad, q4 = 16 × 106 Nm/rad, and q5 =
2.5 × 106 Nm/rad. Calculate the fundamental frequency of torsional vibrations using
Holzer’s method.
Solution:
30
Since only the first mode is required, an estimate may be obtained by reducing
the system to two inertias, say 800 kgm2 and 300 kgm2 joined by a torsional stiffness of
2 × 106 Nm/rad. Then from the relation:
n =
q (I 1 + I 2 )
=
I1 I 2
2 10 6 1100
= 96 rad/s
800 300
The procedure of the Holzer method will now be followed, taking ωn = 100 rad/s for a
first trial and letting A1 = 1 unit for simplicity. It is convenient to enter the values and
calculations in a table as each step is carried out as in table below.
I
Q
ωn2/q
A
IA
ΣIA
60
60
60
60
700
300
----15 × 106
15 × 106
15 × 106
16 × 106
2.5 × 106
---6.67 × 10-4
6.67 × 10-4
6.67 × 10-4
6.25 × 10-4
40 × 10-4
1
0.96
0.88
0.768
0.633
-2.0
60
57.6
52.9
46.1
443
-600
60
117.6
170
216
659
59
δA = (ωn2/q)(ΣIA)
----0.040
-0.0784
-0.1137
-0.135
-2.637
Since there is only one mode and A1 has been assumed positive, the ‘remainder’,
59 for ΣIA (which should be zero or as near zero as possible) indicates that the assumed
value for ωn is too low. The calculations are repeated for higher values and it is found
that the actual frequency is about ωn = 103.5 rad/s. (Try it! You should get about 1.4 as
the ‘remainder’ for ΣIA). Anyway, it is shown in the table below.
I
Q
ωn2/q
A
IA
ΣIA
60
60
60
60
700
300
----15 × 106
15 × 106
15 × 106
16 × 106
2.5 × 106
---7.13 × 10-4
7.13 × 10-4
7.13 × 10-4
6.68 × 10-4
4.23 × 10-3
1
0.96
0.88
0.768
0.62
-2.16
60
57.6
52.8
45.6
434
-648.6
60
117.6
170.4
216
650
1.4
δA = (ωn2/q)(ΣIA)
----0.043
-0.084
-0.121
-0.144
-2.782
7.0 TRANSVERSE VIBRATIONS OF BEAM SYSTEMS
7.1 Single Concentrated Load of Light Beam
This is a single-degree-of-freedom system, and if the restoring force of the mass
due to beam stiffness is ky, where y is the vibrational displacement, then
my + ky = 0
n =
k
g
=
m
____________ (7.1)
31
where δ is the static deflection which could result from an applied load, mg (δ =
mga2b2/3EIl for a simply supported beam of span l on which a mass m is at distances a
and b from the supports; and δ = mgl3/3EI, for a cantilever, where l is the distance of m
from the fixed end).
7.1.2 Effect of mass of beam
If the mass of the beam is to be considered, then the equivalent load (given)
below must be added to the concentrated load:
(i) simply-supported beam, central load:
(17/35) × mass of beam;
(ii) built-in beam, central load:
(13/35) × mass of beam; and
(iii) cantilever, end load:
(33/140) × mass of beam.
7.2 Several Concentrated Loads
7.2.1 Exact solution method
The deflection at a point x due to a unit load applied at xq can be written as apq.
This is defined as an influence coefficient and its value can be calculated from beam
deflection theory (see Solid Mechanics II) when the boundary conditions are known (i.e.
positions and types of support).
Consider the beam of figure 7.1, which carries masses m, 4m and 2m at quarter
y
y2
y3
y1
O
l/4
l/4
l/4
l/4
x
m
2m
4m
Fig. 7.1
points and is simply-supported at the ends. It can be shown that the lowest natural
frequencies, ωn1 and nn1 are given by:
EI
n1 = 2.97
_____________ (7.2a)
ml 3
n n1 = 0.473
EI
____________ (7.2b)
ml 3
7.2.2 Approximate Methods
(i) Dunkerley’s Empirical method
If n1, n2, etc are the frequencies of vibration of the concentrated loads, when
each load acts on the beam alone, and nb is the frequency of the vibration of the beam
under its own weight, then:
1
1
0.563
n1 =
; n2 =
;......nb =
, if simply supported,
2 1
2 2
and nn, the frequency of the whole system is given by:
32
1
1
1
1
= 2 + 2 + ..... + 2
2
nn nn1 nn 2
nb
1
nn =
2 1 + 2 + ..... +
1.27
=
1
i i + 1.27
___________(7.3a)
and
n21 =
n21 =
g
____________(7.3b)
g
+ 1.27
________(7.3c)
(ii) Rayleigh’s Principle (or Energy Method)
Assuming that the shape of the vibrating beam is similar to the static deflection
curve (figure 7.2), then:
2
2 2
x
dx
(
) dx
EI
d
Y
dx
2
n =
______(7.4a ), or
mY 2
y
mY _____________(7.4b)
n2 = g
Y
mY 2
The value of y under each load is calculated with
l
all the loads acting together. The mass of the beam
Fig. 7.2
may be taken into account by adding to each concentrated
load a mass of the beam between the centres of the section
into which the loads divide the beam, or by using the formulae of section 7.1.2.
7.3 Uniformly-distributed Load
7.3.1 Exact Solution method
Let the vibration of the beam be y = Y sinωnt, where Y is a function of x. If m
is the mass per unit length, then:
EI
g
n = 2
= (l ) 2
_________(7.5a)
m
k
1
1 (l )
n
__________(7.5b),
2
2
k
2
nn =
where = n m EI .
The principal cases are:
αl
Simply-supported beam:
π
k
384
5
Built-in beam:
3
2
384
Cantilever
1.875
8
33
n
0.563
0.571
0.621
;
; and
.
7.3.2 Approximate Methods
Rayleigh’s (or Energy) Method
Let the static deflection of an element of beam dx, distant x from one end, be y
and the amplitude of vibration be Y, figure 7.2. Assuming the shape of the vibrating
beam to be similar to the static deflection curve: y = Y sin ωnt, then the maximum
velocity (when passing through the mean position) is ωnY and all the energy is then in
the kinetic form. Depending on whether distributed mass m and/or point masses m are
to be taken into account,
EI (d Y dx ) dx _________(7.6a), or
=
m Y dx + mY
mYdx + mY ________(7.6b).
=g
m Y dx + mY
2 2
2
2
n
n2
2
2
2
2
Equation (7.6a) is simpler to use numerically and can be applied to higher modes of
vibration if required.
Examples:
Ex. 1: Obtain expressions for the fundamental frequency of lateral vibrations of a
uniform beam of length l simply supported at each end, if the vibrating shape is
assumed to be (a) Y = A sin(π/l)x, (b) Y = Cx (1 – x), or (c) the static deflection curve.
Solution:
(a)
Equation (7.6a) becomes:
2
EI (d 2Y dx 2 ) dx
2
n =
.
2
m Y dx
Now, Y = A sin (π/l)x,
d 2Y
2
=
−
A
sin x, and
2
2
l
dx
l
2
d 2Y
4
2 = A 2 4 sin 2 x, and
l
l
dx
Y 2 = A 2 sin 2
=
2
n
n =
x.
l
l
0
l
EI 4 sin 2
l
0
l
m l 4 sin 2
2
xdx
xdx
EI
.
m
2
l
(b) Equation (7.6a) gives:
l
n2 =
EI 4dx
0
m x (l − x ) dx
l
2
2
0
n =
10.95
l2
EI
.
m
34
(c) The static deflection curve for a uniformly-loaded beam is:
mg 4
(
Y=
x − 2lx 3 + l 3 x )
24 EI
Equation (7.6b) then becomes:
l
n2 =
g m Ydx
0
l
mY
2
0
n =
24 EIl 5 5
m 3Il 4 630
=
dx
9.88
l2
EI
.
m
Ex. 2 Use Dunkerley’s approximation to determine the fundamental frequency of the
system of figure 7.1.
Solution:
mg (l 4) .(3l 4 )
3mgl 3
=
_______(i )
3EIl
256 EI
4mgl 3 mgl 3
2 =
=
______________(ii )
48 EI 12 EI
2
2
2mg (3l 4) (l 4 )
3mgl 3
3 =
=
_____(iii )
3EIl
128 EI
3mgl 3 mgl 3 3mgl 3 1.1625 ml 3
= 256 EI + 12 EI + 128 EI = EI ____(iv)
Putting these into equation(7.3b),
gEI
EI
n1 =
= 2.905
rad/s
3
1.1635 ml
ml 3
and from equation (7.3a),
1
EI
n1 =
n1 = 0.462
Hz
2
ml 3
NB: mass of beam was neglected, hence the omission of Δ/1.27.
2
1 =
2
Ex. 3 Use Rayleigh’s method to obtain an approximate expression for the lowest natural
frequency of the system of figure 7.1, assuming the beam vibrates in a half-sine wave.
Solution:
Using equation (7.6a), with m = 0,
l
=
2
n
(
)
EI d 2Y dx 2 dx
0
2
3
mY
.
2
1
Y1 is the static deflection at m1 which would be caused by all three loads m1g, m2g, and
m3g acting together at their respective positions along the beam. Similarly for Y2 and
Y3. In this case, m1 = m, m2 = 4m, and m3 = 2m, and if the vibrating shape is assumed to
be half-sine wave then Y = A sinπx/l. Hence,
35
Y1 = A sin 4 = 0.707 A,
Y2 = A sin 2 = A,
Y3 = A sin 3 4 = 0.707 A, and
x
sin 2 dx
0
EI
2
l
n1
= 4
2
l m 0.707 + 4 + 2 0.707 2
l
4
(
i.e. n1 = 2.967
)
EI
and
ml 3
EI
ml 3
NB: compare the results of Ex. 2 and Ex. 3 (both obtained by Approximate methods) to
equation (7.2) (obtained by Exact method) then it is seen that there is an error of about
2% by the Dunkerley’s method (and always give a value less than the true or actual
value) and an error of just 0.2% by the Rayleigh method (and always higher than the
actual value).
n n1 = 0.474
8.0 WHIRLING OF SHAFTS
8.1 Introduction
Due to small imperfections during manufacture there will always be some
eccentricity between the axis of a shaft and the bearing centre-line. As the speed of
rotation increases, inertia effects will tend to increase this eccentricity, but will be
resisted by the stiffness of the shaft acting as a beam. At certain speeds these two
effects will be equally balanced causing large deflection to build up as in a resonant
condition. These speeds are known as the whirling speeds or critical speeds, ωc.
8.2 Whirling of a Single Mass Eccentrically Mounted
Let a mass m be attached to a rotating shaft such that its centre of mass is at a
distance e from the shaft centre-line. If, when rotating at a speed ω, the shaft centre-line
at the mass has a deflection y from the bearing axis, the inertia force is m(y + e)ωn2.
This is resisted by the restoring force kyEI/l3, where k is the stiffness of the shaft treated
as a beam. Hence,
m( y + e ) n2 = (kEI . y ) l 3 ,
y=
e
__________(8.1)
kEI
−1
m n2 l 3
kEI
= 1 , the deflection y becomes infinite (i.e. ωn = ωc) and whirling takes
m n2 l 3
place. The whirling or critical speed is therefore:
When
kEI
g
=
__________(8.2),
3
ml
where, δ denotes the static deflection of the shaft at the mass, and
1 g
1
n=
_________(8.3).
2 2
Note that the y is also given by:
c =
36
y=
n2 e
c2 n
=
e ________ (8.4).
c2 − n2 1 − c2 n2
This gives the deflection of the shaft from the static deflection position at any speed ω n
in terms of the critical speed ωc.
When ωn <ωc, y and e have the same sign (same sense), i.e. G (the centre of
gravity of the mounted mass) lies to the outside of O (the centre-line of the shaft). When
ωn > ωc, y and e are of opposite sign, i.e. G lies between the centre of the rotating shaft
and the static deflection curve (note that y is measured from O to the static deflection
curve and e from G to O). At very high speeds above the critical ( n c ), y → – e,
which means that G finally coincides with the static deflection curve and the shaft
rotates in a highly stable condition. Figure 8.1 shows the positions of O and G relative
to the static deflection curve and also the variation in the numerical value of y as ωn
varies from zero to above the whirling speed.
y G•
O•
y
•O
e •
G
below ωc
e
above ωc
G• e
O•
y
far above ωc
y
e
ωc
ω
Fig. 8.1
Assignment:
Discuss:
(i)
The effect of slope of mass, and
(ii)
The effect of end-thrust,
on the whirling speed of a shaft.
Examples:
Ex. 1: A 15-mm diameter shaft rotates in long fixed bearings 0.6 m apart, and a disc of
mass 20 kg is secured at mid-span. The mass centre of the disc is 0.5 mm from the shaft
axis. If the bending stress in the shaft is not to exceed 120 N/mm2, find the range of
speed over which the shaft must not run. E = 200 000 kN/mm2 and k = 192 N/m.
Solution:
The shaft must be treated as a beam fixed at both ends, for which the central
deflection due to a load W is y = Wl3 / 192 EI and the corresponding maximum bending
moment is Wl / 8, giving a maximum bending stress of:
37
Wl d 2
.
8
I
Hence, the maximum value of y may be written in terms of the allowable stress thus:
l 2
600 2 120
y=
=
= 1.2 mm .
12 Ed 12 200000 15
But from equation (8.4),
=
y=
c2 n
0.5 ,
1 − c2 n2
where y = ± 1.2 mm and
192 200000 15 4
= 22090 (rad/s) 2 .
3
6
20 0.6 64 10
Substituting these values for y and ωc2 gives:
ωc1 = 125 rad/s = 1190 rpm
ωc2 = 195 rad/s = 1860 rpm.
The permitted stress will be exceeded if the shaft is run between these speeds.
c2 = 192 EI ml 3 =
EXERCISES
Free (undamped) Vibrations
1) A mass m1 is suspended from a fixed point by means of a spring of stiffness S1.
Attached to m1 by means of a second spring of stiffness S2 is another mass m2. When
the system is set in to free vibrations, neglecting inertia of the springs, show that:
m1m2n4 − (m1 + m2 )S 2 + m2 S1 n2 + S1 S 2 = 0
If m1 = m2 = 225 kg, and S1 = 240 kN/m, S2 = 120 kN/m, find the frequencies of
vibration and the ratio of amplitudes of m1 and m2.
[(ns: 2.612 and 6.79 Hz; 0.349 and – 2.79]
2) Two rotors, one of mass 20 kg and radius of gyration 120 mm, the other 30 kg and
150 mm, are mounted at opposite ends of a shaft of 50-mm diameter. If the frequency of
torsional vibration is 100 Hz, what is the length of shaft and the position of the node?
Modulus of rigidity = 80 000 N/mm2.
[Ans: 616 mm; node at 194 mm from larger rotor]
Damped Free Vibrations
1) A light uniform bar (figure E2.1) of mass m and length l is hinged at one end while
the other end is carried by a spring of stiffness S so that in its rest position the bar is
horizontal. Halfway along the bar, a dashpot is attached which produces a damping
force of c per unit velocity. Write down the equation of motion obtained
by taking moments about the hinge and show that the time period
is given by:
S
16m
tp =
192 Sm − 9c 2
A•
•B
½l
½l
2) A load of 50 kg is suspended from a spring of
c
stiffness 5 kN/m, and its motion is damped by a force
Fig. E2.1
proportional to the velocity, of magnitude 75 N at 1 m/s.
If the load is displaced from its equilibrium position and released,
find the number of complete vibrations before the amplitude is less than one-tenth of the
original displacement.
[Ans: 5]
38
Forced (undamped) vibrations
1) Derive an expression for the displacement of a mass suspended from a spring and on
which a harmonically varying force F = F0 sin ωt acts, explaining briefly what is meant
by transient and steady-state vibrations.
A vehicle of mass 510 kg, suspended on springs of total stiffness 350 × 103 N/m,
is acted upon by a harmonically varying force F = 450 sin ωt N from the road surface.
Determine the amplitude of vibration at a forcing frequency of 2.33 Hz; the
magnification factor; and the maximum vertical acceleration during vibration. Would a
rider in the vehicle leave his seat under this condition? (Neglect any damping effects).
[Ans: 1.87 mm; 1.45; 0.4 m/s2]
2) A spring-mass system has a natural frequency of 1.2 Hz and damping may be
neglected. When the mass is stationary the free end of the spring is given a displacement
y = 50 sin 2πt mm, where t (seconds) is the time from the beginning of the motion.
Determine the displacement of the mass after the first 0.3 seconds. [Ans: 53 mm]
Damped Forced Vibrations
1) A periodic force F = 40 cos 10t N is applied to the system shown in
figure E4.1. Calculate, from first principles, the work
done per cycle. [Ans: 1.506 J]
4.5 kN/m
F = 40 cos 10t
2) A spring-mass accelerometer has a natural
frequency of 10 Hz and is damped at 0.6 times the critical
value. When attached to a body vibrating at 6 Hz, the
(relative) amplitude recorded by the instrument is 1 mm.
Calculate the amplitude and maximum acceleration of the body.
[Ans: 2.67 mm; 3.80 m/s2]
30 kg
240 Ns/m
Fig. E4.1
3) A single-cylinder engine has a mass of 100 kg and a vertical
unbalanced force of 400 sin 13πt N. It is supported by springs of total stiffness 60 kN/m
and a viscous damper is fitted which gives a force of 700 N per m/s. Determine the
maximum force transmitted to the ground through the spring and damper. Also find the
transmissibility of the system.
[Ans: 1220 N]
Vibrations of Multi-degrees-of-freedom Systems
1) A motor having a mass of 60 kg is supported elastically on a mounting which deflects
5 mm under the static load. Due to rotating imbalance at the motor running-speed of 400
rpm a vibration is set up having an amplitude of 4 mm. This is to be eliminated by
attaching to the motor a spring carrying at its free end a mass of 2 kg. If damping may
be neglected, determine the spring stiffness and the amplitude of vibration of the added
mass.
[Ans: 3510 N/m; 14.2 mm]
2) Reduce the gear system of figure E5.1 to an equivalent in-line system and hence
deduce the frequency equation.
I2
I1
A turbine of moment of inertia 4 kg/m2 is
q1
connected by a shaft of stiffness 10 kN m/rad to a
2
pinion of inertia 0.25 kg m . The pinion drives a wheel
1
2
of inertia 160 kg m with a speed reduction ratio of 8:1,
G
and this is connected by another shaft of stiffness 1.3
q2
2
MN m/rad to a generator of inertia 60 kg m . Find the
2
natural frequencies of torsional vibration of the system.
39
I3
Fig. E 5.1
I4
[Ans: 11.3, 25.6 Hz;
3) A 6-cylinder engine is directly coupled to a centrifugal
pump. The equivalent dynamical system consists of six rotors for
the six cylinders, each of moment of inertia 12.8 kg m2, separated by shafts of stiffness
39.3 × 106 Nm/rad each, and a rotor of moment of inertia 355 kg m2 for the pump
separated from the last cylinder by a shaft of stiffness 33.2 × 106 Nm/rad. Using
Holzer’s method, show that the fundamental frequency is approximately 1225.22 rad/s.
4) A torsional system consists of three inertias I1, I2, and I3 in line and of magnitudes 10,
20, and 30 kgm2 respectively. The torsional stiffness of the coupling between I1 and I2 is
20 kNm/rad, between I2 and I3 is 50 kNm/rad and I3 is connected through a stiffness of
100 kNm/rad to a fixed frame. Show by the Holzer method that the fundamental
frequency is approximately 4.5 Hz.
5) For the system of figure 6.5 (also under example 2) in section 6.0, show that the
second mode of frequency of torsional vibrations is approximately 32 Hz.
6) A tractor and trailer, with masses m1 and m2 respectively, are connected by a spring
of stiffness k. Neglecting any damping in the system, derive an expression for the
natural frequency of longitudinal oscillations. In such a system if m1 = 2t, m2 =1t and k
= 72 kN/m, calculate the natural frequency.
[Ans: 1.655 Hz]
Transverse Vibrations and Whirling of Shafts
1) a)Determine an expression for the lowest frequency of the beam of figure 7.1, using:
(i) the Dunkerley’s method, and
(ii) the Rayleigh’s method.
{Hint: neglect mass of beam in the analysis and for Rayleigh’s method assume the
vibrating shape to be a half sine-wave of the form Y = A sin x l }.
b) Given EI = 61350 Nm2, m = 40 kg and l = 2.5 cm, calculate the natural frequency
from the two methods in (a) above. If the natural frequency by exact solution method is
found to be 4.6863 Hz, what are the percentage errors resulting from the two
approximate methods above?
[Ans: 4.5773 Hz, 4.6962 Hz; 2.3%, 0.2%]
2) A tubular steel shaft 1.5 m long having external and internal diameters of 35 mm and
25 mm is coupled through universal joints at each end. Evaluate the first and second
whirling speeds if the density of steel is 7760 kg/m3 and E = 205 000 N/mm2.
[Ans: 2315, 9260 rpm]
3) A shaft 25 mm diameter is supported in self-aligning bearings 400 mm apart and
carries a wheel of mass 50 kg at a point 150 mm from one bearing. If E = 205 000
N/mm2, what is the whirling speed? If the centre of mass of the wheel is 1.5 mm from
the shaft axis, find the deflection of the shaft when running at 3000 rpm.
[Ans: 2473 rpm; 4.68 mm]
4) Use Rayleigh’s method to determine the natural frequency of a cantilever beam of
length l carrying a uniformly distributed load of intensity m if the vibrating form is
assumed to be (a) Y = A (l – cos πx/2l), or (b) the static deflection curve. What is the
error in each case when compared with the exact value?
[Ans: 0.583 (EI m l 4 ), 0.562
40
(EI
)
ml 4 ; 4%, 0.4% ]
5) Consider the beam of figure E6.1 with a flexural rigidity of 32 × 105 Nm2; estimate
the natural frequency of transverse vibration of the system using:
a) Dunkerley’s method;
b) Rayleigh’s method, if the vibrating shape follows the curve: Y = Cx(l − x) ; and
c) Distinguish between transverse and torsional vibration systems, citing one
example of each.
1t
1t
1m
200 kg/m
1m
3m
Fig. E6.1
41