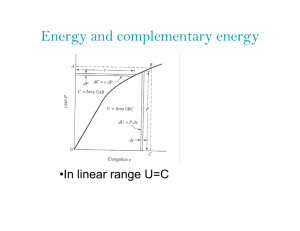
MAE 5563 Finite Element Methods Professor J.K. Good Fall 2019 Is the topic of finite elements relevant to these amazing machines? Theory ~1940 Hrennikoff Courant Computers UNIVAC 1 1951 IBM 360 1964 Software NASTRAN 1968 ANSYS 1969 Apollo Saturn V 1966 SR71 1966 Any finite element calculations on these marvels were performed by hand…. • Why are we here? • Most BS level engineers have limited stress analysis skills. • B.S. coursework focuses on: – – – – Beams in bending and shear Thin & thick wall vessels Truss structures Students may apply FE software but cannot attest to the validity of the results. • Reality - Today’s structures are often complex in shape and in material properties. What are the stresses in the red plate? If you model these stresses, when do you know you have correct results? These problems were solved historically using the Theory of Elasticity. The Stress Method requires these steps: 1. Assume functional forms of sx, sy, sz, txy, tyz, and tzx(x,y,z). P1 P2 2. Check Body Equilibrium s x t xy t xz fx 0 x y z t xy s y t yz fy 0 x y z t xz t yz s z fz 0 x y z 3. If the functional forms of sx, sy, sy, txy, tyz, and tzx do not satisfy these equations, start over! 4. Check surface equilibrium y n Tx Ty Tn 0 P1 x on free boundaries P2 nx cos n,x ny cos n,y nz cos n,z s x n x t xy n y t xz n z Tx t xy n x s y n y t yz n z Ty t xz n x t yz n y s z n z Tz The Tx tractions in the boss regions integrated over the area should yield the applied loads P1 and P2. 4. If the assumed forms of stress don’t satisfy these equations, start over, assume new forms. 6. Convert stresses to strains using constitutive equations: 1 x s x s y sz E 1 y s y s x sz E 1 z sz s x s y E E E xy t xy yz t yz 21 21 E zx t zx 21 7. Integrate strains to yield displacements u, v, w(x,y,z): u v w x y z x y z u v v w xy yz y x z y w u zx x z ? u, v,w welded boundary 0 8. Are these displacements (u, v, and w) compatible with the external constraints? Yes: You are done! No: Start over! Theory of Elasticity – A “Simple” Example • Let’s consider an end loaded cantilever beam that we were familiar with as undergraduates. L 1 P v u c c y x • Based on our experience: s x d4 xy (Euler) sy 0 d4 2 t xy b2 y (Parabolic Shear Stress) 2 • 2D Body Equilibrium is satisfied by these assumed forms: s x t xy fx 0 x y t xy s y fy 0 x y Assume the body intensity forces fx and fy are negligible • On the upper and lower boundaries where y=+c, surface equilibrium dictates that the shear stress must vanish: d4 2 txy b2 c =0 y c 2 d4 2b2 c2 • On the loaded end (x=0) the shear stress txy integrated over the area must be equal to the applied load if surface equilibrium is to be satisfied: b2 2 t xy dy b2 y dy P 2 c c c c c • Substituting back we have: 3P Pxy sx xy 3 2c I 2 3 (I= c ) 3 3P b2 4c sy 0 3P y 2 P 2 VQ 2 t xy 1 c y 2 4c c 2I It • These results appear to be in exact agreement with what we learned in strength of materials course work. • If in fact we look closer this may or may not be the case. To be exact the load P would have to be applied parabolically to the tip of the beam (x=0) and be reacted parabolically at the beam root (x=L). If they are not our stress solution may be in error at the tip and root but by St.Venant’s principle we can state that they become accurate away from these surfaces. • St. Venant’s Principle: If the loading distribution on a small section of an elastic body is replaced by another loading which has the same resultant force and moment as the original loading, then no appreciable changes will occur in the stresses in the body except in the region near the surface where the loading is altered. Rivello • Now we must determine the deformations which result from the stress functions that have satisfied body and surface equilibrium. First we convert the stress functions to strain functions. • Constitutive Relationships sx u 1 Pxy x sx s y x E E EI s x Pxy v 1 y s y s x y E E EI v u txy P 2 2 xy c y x y G 2IG • Integrating the x and y strains yields: 2 2 Pxy v f1 x 2EI Px y u f y 2EI where f(y) and f1(x) are as yet unknown functions of y and x only. • If we substitute u and v into the shear strain equation we have: df1 x Px Py 2EI dy 2EI dx P c2 y2 2IG 2 df y 2 • Let’s now collect the terms which are functions of x only, y only, and constants: Px 2 df1 x Fx 2EI dx df y Py 2 Py 2 G y dy 2EI 2IG Pc2 2IG a constant • The shear strain equation can now be rewritten as: F x G y which means that F(x) must be some constant we will call d and G(y) must be some constant e and thus: 2 Pc de 2IG d f1 x Px 2 from F(x): d dx 2EI d f y Py 2 Py 2 from G(y): e dy 2EI 2IG Now we can determine f(y) and f1(x): 3 3 Py Py f y ey g 6EI 3 6IG Px f1 x dx h 6EI • If we substitute these expressions back into our expression for u and v we have: 2 3 3 Px y Py Py u ey g 2EI 6EI 6IG Pxy2 Px3 v dx h 2EI 6EI • Now we must determine the constants e, g, d, and h using kinematic (displacement related) boundary conditions. First we know at the root of the cantilever (x=L, y=0) that u and v are zero. From our equations above: g0 3 PL h= dL 6EI • The deflection curve for the elastic axis of the beam can be found by setting y=0 in v(x): Px3 PL3 d L x v y 0 6EI 6EI • We now have more than one route by which we can proceed. Our first route will be to assume the slope of the deflection of the root of the cantilever will be zero: v 0 x x L,y 0 • Substituting into the derivative of our deflection equation (v)y=0 yields: 2 PL d • Earlier we found: 2EI Pc2 ed so 2IG PL2 Pc2 e= 2EI 2IG • We have found all the constants now and can write u and v: Px 2 y Py3 Py3 PL2 Pc2 u y 2EI 6EI 6IG 2EI 2IG Pxy2 Px3 PL2 x PL3 v 2EI 6EI 2EI 3EI • The deflection equation for the elastic axis is: Px3 PL2 x PL3 v y 0 6EI 2EI 3EI • At x=L this yields the deflection PL3/3EI, the value we found before in strength of materials. • The 2nd route we could have chosen would be to set the slope at the root to zero using the expression: u 0 y x L y0 • Our equation for u was: u x L,y 0 0 0 Px y Py Py u ey g 2EI 6EI 6IG 2 3 3 • If we set x=L we have: PL2 y Py3 Py3 u ey 2EI 6EI 6IG and taking the derivative wrt y yields: u PL2 PL2 e 0 e 2EI 2EI y x L y0 • Earlier we found: Pc2 ed so 2IG PL2 Pc2 d= 2EI 2IG and substituting into our earlier equation for the deflection curve: Px3 PL3 d L x v y 0 6EI 6EI we can find the deflection curve for the elastic axis: Px3 PL2 x PL3 Pc2 v y 0 L x 6EI 2EI 3EI 2IG • The slope of the deformation wrt x is: 2 2 2 Px PL Pc dv dx y 0 2EI 2EI 2IG and will be non zero at x=L: 2 dv Pc y 0 2IG dx xL • At the beam tip where x=0 the deflection is now: PL3 Pc2 L v y 0 3EI 2IG x 0 • The 1st term is the deformation due to bending strain. The 2nd term is the deformation due to shear strain. For large L (L>20c) you will find the 1st term is dominant. For small L (L<20c) you find the 2nd term becomes important. • Theory of Elasticity – Benefits: Closed form solutions for stresses, strains, and deformations as functions of x,y and z are obtained. This can be the best format for providing solutions to problems to other users. – Disadvantages: A good deal of mathematical prowess is required to solve non-trivial problems. It may require much iteration and time to come to a solution which satisfies all the stress (kinetic) and deformation (kinematic) boundary conditions. • A Finite Element Solution E = 30*106 psi 10000 lb = 0.29 t = 0.5 10000 lb u (in) What functions of x and y would produce these displacements? v (in) sx (psi) What functions of x and y would produce these stresses? sy (psi) • This is why we are here. The theory of elasticity is very difficult to apply for the complex problems we must solve. • We must resort to other methods which may not give us closed form functions for the displacements, strains and stresses. Discrete results are better than none! • Anyone can execute a finite element code. My objective is to explain the science of the method to you and how you should know when your output results are correct. Potential Energy & Equilibrium • Definition: The total potential energy of an elastic body is: = Strain Energy+Work Potential (U) (WP) • Definition: U is the strain energy due to stresses and strains within the elastic body. For linear elastic problems at a point in space the strain energy is: sx dU 1 T dU s dV and 2 1 T U= s dV 2 Vol x for the body. • The Work Potential (WP) is the ability of external and internal forces to perform work on the body as these forces move through deformations which resulted from the stresses and strains. The WP is always defined to be negative in expressions although calculation may result in a positive contribution to the total potential: WP due to inertial forces WP u T f dV V u T TdS u i Pi S WP due to surface tractions T i WP due to concentrated loads • The total potential is thus: 1 = sT dV uT f dV 2V V T T u TdS u i Pi i S • Principle of Minimum Potential Energy: “Among all compatible states of deformation of an elastic body in stable equilibrium, the true deformations are those for which the total potential is a minimum.” Rivello, Theory and Analysis of Aircraft Structure, McGraw-Hill, 1969. • Refer to Example 1.1 The Rayleigh-Ritz Method • We have seen how the PMPE applies to linearly elastic discrete problems. Now we will apply it to continuums. • A set of deformations are assumed. The form of deformation may be polynomial functions but need not be: u a11 a 2 2 a 33 where a1, a2, and a3 are constant coefficients for which we shall solve. 1, 2, and 3 may be polynomials, transcendentals, etc. • The deformation function (u) must satisfy kinematic boundary conditions. • We then develop the total potential as a function of the constant coefficients. So: =(a1, a2, a3 ) where these constant coefficients are three independent unknowns for which we must solve. • The variation in the total potential is: a1 a 2 a 3 0 a1 a 2 a 3 • Since the forms of variation are arbitrary: 0 0 0 a1 a2 a3 which generates 3 equations by which we can solve for our 3 unknowns. • Refer to Example 1.2. Piecewise Continuous Functions: du u a1 x 0 x 1 a1 dx du u a1 2 x 1 x 2 a1 dx du 2 11 EA dx dx 20 12 2 du EA dx 2 a1 dx 21 2 a1 2 a1 2 a1 2 0 a1 a1 1 This yields the exact solution: du u x s = E 1 0 x 1 dx du u 2 x s = E 1 1 x 2 dx The expression for the Total Potential can be applied to different types of structure other than the rod in Example 1.2. Beam structures are examples. Classic beams are defined as structures whose length dimension exceeds any cross sectional dimension by a factor of ten. In such cases the only substantial stresses and strains are calculated from Euler’s expressions: My My sx and x I EI Also recall that the curvature of a beam (2nd derivative of the displacement) at some location x is equal to the bending moment at that location divided by the bending 2 stiffness: d v M 2 EI dx The strain energy is: 2 1 1 My T U dVol s dVol 2 Vol 2 Vol EI2 M and EI are at best functions of x and thus: U 2 1 M 2 2 Ey dAdx but y dA I 2 x EI A A and: 2 2 1 d v U 2 EI dx 2 x dx Example: Use of Rayleigh-Ritz Method on a Beam y,v W x L Pick displacement functions which satisfy or can be made to satisfy the kinematic boundary conditions v(0) = v’(0) = 0. I selected: x v a 1 Cos b x 4 6L2 x 2 2L Our strain energy expression yields: U EI 5a 2 5 15360abL4 12288b 2 L8 320L3 The Work Potential results from the surface traction: 5 9bL 2aL T WP u Tds WaL 5 s The Total Potential is the sum of the strain energy and the work potential. Now we minimize the Total Potential with respect to the unknown coefficients a and b. 10a 5 15360bL4 2 EI WL 1 0 3 a 320L 24576bL8 15360aL4 9WL5 EI 0 3 b 5 320L Now we have two equations with which we can solve for a and b. Solving yields: a 4 4WL 8 25 W 5120 2560 36 b 128EI 6 960 6 EI 960 Now a and b can be substituted back into the assumed displacement function to yield the solution: 4WL4 8 25 x v 1 Cos 2L EI 6 960 W 5120 2560 36 128EI 6 960 x4 6L2x 2 How accurate is the solution? Without comparison you cannot be sure. You can expect that the values of a and b are the best possible solutions for the displacement functions chosen because the Principle of Minimum Potential Energy has been employed. We can substitute numerical values for the inputs and compare: W=10 lb/in E = 10,000,000 psi I = 1/12 in4 L = 20 in The exact solution from strength of materials is: Wx 2 v 6L2 4Lx x 2 24EI X(in) RR (in) 0 0.0000 2 0.0036 4 0.0142 6 0.0313 8 0.0538 10 0.0806 12 0.1105 14 0.1420 16 0.1740 18 0.2058 20 0.2372 Exact(in) 0.0000 0.0045 0.0168 0.0352 0.0584 0.0850 0.1140 0.1446 0.1761 0.2080 0.2400 %Error #DIV/0 -19.7 -15.2 -11.2 -7.9 -5.2 -3.1 -1.9 -1.2 -1.0 -1.2 Although the % errors are not appealing, these are small numbers where % error can be meaningless. A chart shows our solution to be quite acceptable. v (in) (in) Deflection .25 Rayleigh-Ritz Exact .20 .15 .10 .05 .00 0 5 10 15 X position (in) 20 In general we wish to solve problems where exact answers are not known. The trial functions we choose for the deformation may be good or bad choices for representing the true deformations. How do we decide we have obtained a good solution? We must select several trial functions, use the theory of minimum total potential to evaluate unknown coefficients, and compare the total potentials that resulted from all trial functions. Whichever trial function yields the lowest total potential will be the best solution by our theory. If several of our trial functions yield comparable total potentials, we gain confidence that our solution(s) are good. In our example of the uniformly loaded cantilever we might propose several solutions. The 1st solution might be the trial function proposed in the example: x v a 1 Cos b x 4 6L2 x 2 2L a and b are known and we can solve for the total potential: 2 2 1 d v T = EI dx u TdS 2 2 x dx S 2 5 W L TP1 0.0242647 EI Let’s pretend we do not know the exact solution is exact and that it is just another trial solution candidate. It’s total potential is: 2 5 W L TP2 0.025 EI A 3rd trial function might be the first half of the function I chose for the example: x v aa 1 Cos 2L We must now resolve the problem for a new constant coefficient aa: aa 32 2 WL4 5EI and the total potential is: W2L5 TP3 0.0216892 EI Finally a 4th trial function might be the second half of my original trial function: v bb x 4 6L2 x 2 We must now resolve the problem for a new constant coefficient bb: 3W bb 128EI and the total potential is: 2 5 W L TP4 0.0210938 EI If we produce a chart of our solutions we can see how much they differ. We see solutions 1 and 2 are similar. We see solutions 3 and 4 are similar. v (in) 0,3 0,2 sol1 sol2 sol3 sol4 0,1 0 0 5 10 x (in) 15 20 Remember all our solutions satisfy the kinematic boundary conditions for the cantilever: v(0)=v’(0)=0. Which is really “best”? How do we evaluate what the best solution is? Our 2nd solution had the minimum total potential. By the Theory of Minimum Total Potential it is the best solution. Total Potential (W2L5/EI) TP1 TP2 TP3 -0,019 -0,02 -0,021 -0,022 -0,023 -0,024 -0,025 -0,026 Trial Solutions TP4 Read Chapter 1 in Chandrupatla and Belegundu. This chapter discusses principles we will use to develop and understand finite element theory. We will ensure we understand these theories by first applying them to continuum problems. I will assign homework next lecture. Have you ever done symbolic mathematics using codes like Mathematica, Mathcad or Matlab? These are all available to you through OSU. I suggest you download one and be prepared to use it.