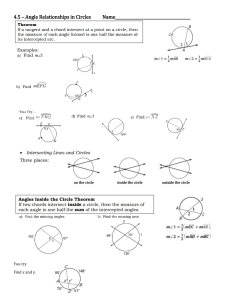
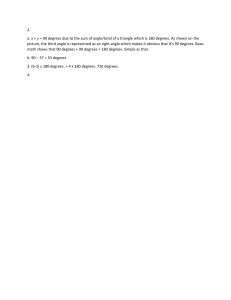
Sensors and Actuators A 263 (2017) 159–165 Contents lists available at ScienceDirect Sensors and Actuators A: Physical journal homepage: www.elsevier.com/locate/sna Multilayer anisotropic magnetoresistive angle sensor Yue Guo a,∗ , Yong Deng b , Shan X. Wang a,b a b Department of Electrical Engineering, Stanford University, Stanford, CA 94305 USA Department of material Science and Engineering, Stanford University, Stanford, CA 94305 USA a r t i c l e i n f o Article history: Received 23 February 2017 Received in revised form 30 May 2017 Accepted 1 June 2017 Available online 2 June 2017 Keywords: Magnetic angle sensor Anisotropic magnetoresistance Intrinsic sensing error a b s t r a c t A multilayer anisotropic magnetoresistive (AMR) sensing stack has been proposed in this paper for high accuracy angle sensing. A quadruple-layer AMR angle sensor was fabricated and showed smaller detection errors than traditional single-layer AMR angle sensors. Based on spectral analysis, intrinsic errors in AMR angle sensors can be attributed to two dominant sources. One is the second harmonic error due to induced anisotropy, and the other is the eighth harmonic error from shape anisotropy. The fabricated quadruplelayer AMR angle sensor with correction algorithm reduces angular errors by a factor of 5 relative to the traditional single-layer device. In addition, the quadruple-layer AMR angle sensor can be operated at low magnetic fields under 100 Oe, enabling the use of weaker, smaller, and cheaper hard magnets for magnetic field sensing. Therefore, the present quadruple-layer AMR angle sensor shows great potential for many industrial applications. © 2017 Elsevier B.V. All rights reserved. 1. Introduction Magnetic angle sensors are a preferred choice for measuring angular position of a rotating body in harsh environments. Various kinds of magnetic sensing technologies, including Hall effect, anisotropic magnetoresistive (AMR), giant magnetoresistive (GMR), and magnetoimpedance (MI), can be used for angle detection [1–3]. Currently, Hall sensors and AMR sensors are commonly used for angular position detection [4–7]. They both have the advantages of low cost, noncontact operation, easy maintenance, and robustness to contamination [8,9]. They are widely needed in modern industries, like automobiles, collaborative robots, and even space exploration [10–14]. In automotive applications, for instance, angle sensors play a vital role in various functions such as anti-lock braking, transmission control, and fuel level measurement [4,15,16]. In addition, angular sensors are necessary to control rotating mechanisms in robotics [17,18]. Today, AMR magnetic angle sensors are becoming an increasingly popular choice for angular measurement [19–21]. In comparison with Hall sensors, AMR angle sensors are advantageous in power consumption, sensitivity and accuracy [22]. Thus, they are preferred for systems that require precise angular positioning and advanced control capability. In order to achieve good sensing accuracy, however, traditional AMR angle sensors need to be operated under a large magnetic field, typically ranging from 300 Oe to 500 Oe [23,24]. Hence, expensive rare-earth magnets are usually required to fulfill the strong field requirement [25]. Moreover, angular detection errors increase abruptly with decreased magnitude of applied magnetic fields. In this paper, a multilayer AMR sensing stack has been proposed, with a proof-of-concept implementation in the form of a quadruple-layer angle sensor. Compared with traditional singlelayer AMR angle sensors, the multilayer AMR devices show good detection accuracy even at low magnetic fields under 100 Oe, which removes the requirements for strong magnets to generate the driving magnetic fields. Intrinsic errors of AMR angle sensors have also been studied by the fast Fourier transform (FFT). Based on spectral analysis results, angular errors can be attributed to two main sources. The first source of error is a second harmonic error due to induced anisotropy, which is introduced by magnetic fields applied during deposition. The other is an eighth harmonic error from shape anisotropy. Identification of these error sources allow for further implementation of a correction algorithm for improved accuracy. Taken together, the present quadruple-layer AMR angle sensor proposed is more accurate and cost-effective, and is very promising for a wide range of applications. 2. Material characterization ∗ Corresponding author Postal address: 476 Lomita Mall, McCullough Building, Room 208, Stanford, CA 94305. E-mail address: yueguo@stanford.edu (Y. Guo). http://dx.doi.org/10.1016/j.sna.2017.06.001 0924-4247/© 2017 Elsevier B.V. All rights reserved. Permalloy (Ni80 Fe20 at%) is a common material choice for magnetic sensors, due to its favorable soft ferromagnetic property, low 160 Y. Guo et al. / Sensors and Actuators A 263 (2017) 159–165 Fig. 1. Schematic view of (a) a single-layer and (b) a quadruple-layer AMR sensing stacks. hysteresis and small magnetostriction coefficient [26]. The permalloy layer can be deposited by sputtering, and is typically deposited in the presence of an external magnetic field from a hard magnet in the chamber. Consequently, an easy axis is induced in a certain direction defined as ␣ = 0◦ , as shown in Fig. 1a. The magnetic energy density of single-layer AMR materials can be described by the equation [27]: EA = Ku · sin2 ˇ (1) where ˇ is the angle between the easy axis and magnetization direction, and Ku is the induced anisotropy. Such uniaxial induced magnetic anisotropy can result in detection errors and is not preferred in AMR angle sensors. The corresponding errors will be analyzed in the fourth section. If a magnetic film is sputtered in the absence of a magnetic field, anisotropy can still develop, but with a random easy axis orientation, which is similarly unsuitable for sensor applications [28]. In this work, a multilayer AMR sensing stack has been presented, with the easy axes of each ferromagnetic thin layer aligned to different directions that are equally distributed from 0 to 180◦ . All layers are deposited under a continuous vacuum by using an ultra-high vacuum magnetron sputtering system with a hard magnet installed in the chamber to generate a magnetic field. cAdditionally, every two ferromagnetic layers have orthogonal easy axes, and hence, can form a pair for compensation, leading to a constant energy density, as described in the following equation: EA = Ku · sin2 ˇ + Ku · sin2 ˇ + 90◦ + Ku · sin2 ˇ + 45◦ +Ku · sin2 ˇ + 135◦ = Ku (2) where ˇ is the angle between the easy axis of the first ferromagnetic layer and magnetization direction, and Ku is the induced anisotropy. Therefore, the presented quadruple AMR sensing stack is isotropic in terms of magnetic anisotropy, which is highly favorable for AMR angle sensors. Fig. 2 demonstrates measurements in a BH curve tracer for all single, double and quadruple-layer thin films. Insets illustrate the corresponding material stacks. Permalloy layers are sandwiched by a Ta buffer layer at the bottom and another protective Ta capping layer at the top. The single-layer sample comprising only one NiFe layer is used as a control. In multilayer sensing structures, Ti spacer layers are employed to separate ferromagnetic layers effectively [29,30]. For example, the quadruple-layer stack contains four layers of NiFe and three Ti spacer layers. When choosing the spacer material, three major factors were considered. Firstly, a Ti buffer layer can improve <111> texture and induce larger grain sizes in NiFe thin films [31–33]. Secondly, it is favorable to have similar or larger resistivity in the spacer layer than the permalloy, so that ferromagnetic layers can work as major conducting layers. Thirdly, thickness of spacer layers is also very critical. A thinner layer is not enough to magnetically decouple ferromagnetic layers, whereas a thicker layer shows a side effect of current shunting. Thus, the Ti spacer layers are optimized to 3 nm in our multilayer AMR sensing stacks. The BH curves are scanned along 4 directions, where angle 0◦ corresponds to the direction aligned with easy axis of the first MR layer. As shown in Fig. 2(a), the single-layer AMR sample shows an obvious uniaxial anisotropy, with the easy and hard axis of BH curves aligning along 0◦ and 90◦ , respectively. Next, the doublelayer sample in Fig. 2(b) depicts an improved performance. BH curves overlap along either 0◦ and 90◦ or 45◦ and 135◦ . Finally, the quadruple-layer sample in Fig. 2(c) gives almost identical BH loops along all four measured directions, demonstrating a preferred magnetically isotropic behavior. 3. Sensor design and fabrication Magnetic angle sensors can be used to measure a rotating magnetic field that is typically generated by a hard magnet installed at the end of a rotor. Fig. 3a gives a schematic view of an AMR sensing pair. There are two Wheatstone bridges, one of which is tilted at 45◦ relative to the other one. As described by the governing equations 3 and 4, two bridges in the AMR angle sensor show different responses to magnetic fields. V1 = 1 VB · MR · sin(2) 2 (3) V2 = 1 VB · MR · cos(2) 2 (4) In our layout, bridge 1 gives a sine wave signal, whereas bridge 2 exhibits a cosine one. The detected angle can be computationally extracted from outputs of the two bridges by using the arctangent relationship, as given in equation 5. = 1 · arctan 2 V 1 V2 (5) Y. Guo et al. / Sensors and Actuators A 263 (2017) 159–165 161 Fig. 2. BH curves of (a) single-layer (b) double-layer (c) quadruple-layer samples with magnetic fields scanned along 4 different directions. Insets are illustrations of material stacks. (a) Fig. 3. (a) Schematic view of an AMR sensing pair with two Wheatstone bridges, and the governing equations. (b) Microscopic view of a fabricated AMR angle sensor. Fig. 3b provides a microscope image of a fabricated AMR angle sensor, and the two Wheatstone bridges are highlighted by two red squares. Fig. 4 gives a process flow for fabricating AMR angle sensors. The device fabrication starts with thermally growing an oxide layer with a thickness of 200 nm on a silicon substrate. Then, AMR sensing stacks can be deposited in a sputtering chamber under ultra-high vacuum. In order to compare performance, both single-layer and quadruple-layer samples were prepared. In step (c), a layer of photoresist was coated and lithographically patterned. Sensing elements were then etched by ion milling. Next, a second lithographic step was performed, followed by sputtering of a layer of aluminum. Finally, electrodes were subsequently formed by a lift-off process. 4. Experimental test and analysis In our measurement, the device under test is located in the center of a Helmholtz coil, which can supply a rotating in-plane magnetic field. In order to achieve uniform and accurate magnetic fields, a 16-bit multifunction data acquisition board from National Instruments was used to control the driving current. Fig. 5a shows typical outputs from a single-layer AMR angle sensor. The supply voltage is 1 V to both Wheatstone bridges, as labeled in Fig. 3a. The black solid line and red dashed line correspond to outputs from bridge 1 and bridge 2 respectively. According to the measurements, fabricated sensors have a peak-to-peak output voltage of about 21 mV/V. Also, output offsets are 1.26 mV/V and 0.36 mV/V for bridge 1 and 2 respectively. After conducting output normal- 162 Y. Guo et al. / Sensors and Actuators A 263 (2017) 159–165 Fig. 4. Process flow of the presented AMR angle sensors. (a) 15 (b) Bridge1 1.0 Normalized Outputs 10 Outputs [mV] Bridge 1 Bridge 2 Bridge2 5 0 -5 -10 0 90 180 270 360 Ideal Sine Ideal Cosine 0.5 0.0 -0.5 -1.0 0 Angle [degree] 50 100 150 Angle [degree] Fig. 5. (a) Outputs from the two bridges in the single-layer AMR angle sensor. (b) Normalized bridge outputs are compared with ideal sine and cosine functions of period half. ization and offset correction, bridge outputs are compared with ideal sine and cosine functions of half period, as shown in Fig. 5b. Based on Equation 5, angles of the rotating magnetic field can be extracted from the ratio of these two voltage outputs, while any difference between the actual applied magnetic field and the value calculated hence is the angular detection error. Although actual outputs from experiments almost overlap with the ideal ones, there are still small deviations between curves, indicating the presence of angular detection errors in these sensors. By subtracting predetermined angles of input magnetic field (Field ) from measured results (Measured ) by angle sensors, we can calculate angular errors for our devices across one full rotation. Angular detection errors from single-layer AMR sensors are plotted in Fig. 6a. Angular errors can also be analyzed in the frequency domain by means of the fast fourier transform (FFT). As shown in Fig 6b, the error spectrum of single-layer AMR angle sensors can be calculated based on the collected data. The majority of spectral errors reside in two dominant parts: the 2nd harmonic component and the 8th harmonic component. Specifically, the 2nd harmonic error can be attributed to the induced anisotropy in AMR sensing materials, whereas the 8th harmonic error arises from the shape anisotropy due to our sensor geometry. A quadruple-layer AMR angle sensor was also fabricated and measured for comparison. Fig. 7 gives angular errors of quadruplelayer AMR sensors from 0◦ to 360◦ , and their corresponding error spectrum. A much smaller 2nd harmonic error can be observed in the quadruple-layer AMR angle sensors, compared with the traditional single-layer AMR angle sensors, which have only one ferromagnetic layer. Due to isotropic magnetic anisotropy in the quadruple AMR thin films, uniform magnetization in all rotational directions can be achieved, leading to the reduction of angular errors. Therefore, the proposed quadruple-layer sensing stack is beneficial for lowering the intrinsic 2nd harmonic error in AMR angle sensors. On the other hand, the 8th harmonic error, which is another dominant error source, can be attributed to sensor shape and layout. Fabricated quadruple AMR angle sensors that have identical geometry to the single-layer sensors show a similar 8th harmonic error. The error can be estimated from theoretical calculation, according to the Stoner-Wohlfahrt model as follows [34]: E = Ku + 1 0 NM 2 sin2 (MR − ω) − 0 MH cos ϕH cos MR − 0 2 MH sin ϕH sin MR (6) where Ku is the induced anisotropy, M is the total saturation magnetization, H is the applied external magnetic field, and N is the demagnetizing factor, which can be estimated by utilizing an equation for rectangular ferromagnetic prisms [35]. Also, angles in the equation indicate the magnetization angle MR , field angle H , and sensing element angle . All three angles have 0◦ aligned with the easy axis of the first ferromagnetic layer. Since the quadruple-layer AMR sensor has an isotropic induced anisotropy, the Ku term is independent of angle. However, the sensing element angle can be pointing at four different directions within the two Wheatstone Y. Guo et al. / Sensors and Actuators A 263 (2017) 159–165 (b) (a) Amplitude [degree] Angular error [degree] 0.8 0.4 0.0 -0.4 -0.8 0 163 90 180 270 0.4 0.2 0.0 0 360 2 Angle [degree] 4 6 8 10 Harmonic Number Fig. 6. (a) Angular error of single-layer AMR sensors between 0◦ and 360◦ . (b) Angle error spectral analysis of single-layer AMR sensors. (a) (b) 0.4 0.4 Amplitude [degree] Angular error [degree] 0.8 0.0 -0.4 -0.8 0 90 180 270 360 Angle [degree] 0.2 0.0 0 2 4 6 8 10 Harmonic Number Angular error [degree] Fig. 7. (a) Angular error of quadruple-layer AMR sensors between 0◦ and 360◦ . (b) Angle error spectral analysis of quadruple-layer AMR sensors. 0.8 0.4 0.0 -0.4 -0.8 0 90 180 270 360 Angle [degree] Fig. 8. Therotical estimation of the 8th harmonic error in patterned quadruple-layer AMR angle sensors. bridges, thus leading to an 8th harmonic error that arises out of shape anisotropy. Fig. 8 demonstrates a therotical estimation of the 8th harmonic error in patterned quadruple-layer AMR angle sensors. The calculated error pattern is very similar to the experimental result that is shown in Fig. 7a. In order to further reduce angular errors in the quadruple-layer angle sensors, the 8th harmonic error can be corrected by subtracting theoretically calculated values from the measured ones. Fig. 9a gives a comparison of angular errors between 0◦ and 360◦ . The quadruple-layer AMR angle sensor with 8th harmonic correction algorithm illustrates much smaller angular errors than the conventional single-layer sensor. The average angular error is only ∼20% of its original value. Fig. 9b shows the resultant error spectra. In comparison with a traditional single-layer angle sensor, which is influenced by both the 2nd and 8th intrinsic harmonic errors, the quadruple-layer AMR angle sensor with correction algorithm illustrates a flat error spectrum. Therefore, this sensor demonstrates better performance, and is promising in applications requiring high accuracy angle detection. Fig. 10 gives the relationship between the magnetic fields and the average of the absolute values of angular errors over one rotation; dashed lines are the corresponding nonlinear fitting curves. Magnetic field dependence of errors is studied for both single and quadruple-layer AMR sensors. The quadruple-layer AMR angle sensor illustrates smaller angular errors than does the single-layer one for diverse applied magnetic fields. In addition, use of the quadruple AMR sensing stack can lower requirements for hard magnets. Due to magnetic anisotropies in soft ferromagnetic thin films, AMR angle sensors will have large output deviations, if a relatively low magnetic driving field is applied. So, a strong hard magnet is usually used to lower detection errors. In quadruple-layer angle sensors, however, the same angle detection accuracy can still be achieved for relatively small magnetic field magnitudes, allowing the use of weaker and cheaper magnets. With an applied magnetic field of 150 Oe, our single-layer AMR angle sensor demonstrates an average angular error of about 0.3◦ , whereas the proposed quadruple-layer angle sensor with correction algorithm achieves a better angle detection accuracy even at a weaker applied field of 80 Oe. Therefore, the quadruple AMR sensors show lower detection errors even Y. Guo et al. / Sensors and Actuators A 263 (2017) 159–165 0.8 0.5 1 layer 4 layers w/ correction (a) (b) 0.4 0.0 -0.4 -0.8 0 90 180 270 360 1 layer 4 layers w/ correction 0.4 Amplitude [degree] Angular error [degree] 164 0.3 0.2 0.1 0.0 0 Angle [degree] 2 4 6 8 10 Harmonic Number Fig. 9. (a) Comparison of angular errors between 0◦ and 360◦ . (b) Spectral analysis of angle errors in different AMR angle sensors. Angular Error [degree] 1.2 References 1 layer 4 layers w/ correction 1.0 Fitting 1 layer 0.8 Fitting 4 layers w/ correction 0.6 0.4 0.2 0.0 60 90 120 150 Field [Oe] Fig. 10. Relationship between applied magnetic field and mean magnitude of angular errors over one rotation for both single and quadruple-layer AMR sensors. Dashed lines are the corresponding nonlinear fitting curves. at smaller magnetic fields, hence allowing for more economical AMR angle sensors, while maintaining high performance. 5. Conclusion A multilayer AMR sensing structure has been presented for angle sensing and is compared with conventional single-layer AMR thin film. Intrinsic errors of AMR angle sensors have been studied. Based on spectral analysis, angular errors are dominated by the second harmonic component caused by induced anisotropy, and the eighth harmonic component from shape anisotropy. Angular detection errors can be effectively eliminated by a quadruple-layer AMR angle sensor with a correction algorithm. In addition, the quadruple-layer sensor demonstrates good accuracy even when operating at a low magnetic field, which relaxes the requirement for expensive, rareearth permanent magnets. Therefore, the proposed multilayer AMR angle sensor, with its enhanced accuracy and cost-effectiveness, can be a very promising candidate in a wide range of industrial applications. Acknowledgements The authors thank Chin Chun Ooi for critical reading of the manuscript. Part of this work was performed using the Stanford Nanofabrication Facility and the Stanford Nano Shared Facilities at Stanford University. [1] R. Bosch, Bosch Automotive Electrics and Automotive Electronics: Systems and Components, Networking and Hybrid Drive, Springer Vieweg, Plochingen, 2014. [2] M. Yamaguchi, M. Takezawa, H. Ohdaira, K. Arai, A. Haga, Directivity and sensitivity of high-frequency carrier type thin-film magnetic field sensor, Sens. Actuat. A 81 (2000) 102–105. [3] P. Jantaratana, N. Bebenin, G. Kurlyandskaya, Magnetoimpedance and magnetization processes of FeCoNi electroplated tubes, J. Appl. Phys. 105 (2009) 013908. [4] C. Treutler, Magnetic sensors for automotive applications, Sens. Actuat. A: Phys. 91 (2001) 2–6. [5] A.J. Fleming, A review of nanometer resolution position sensors: operation and performance, Sens. Actuat. A: Phys. 190 (2013) 106–126. [6] A. Bartos, A. Meisenberg, D. Schmitz, A novel magnetoresistive angle sensor for 360 detection, in: 7th Symposium on MR Sensors, Wetzlar, 2003. [7] U. Ausserlechner, Inaccuracies of anisotropic magneto-resistance angle sensors due to assembly tolerances, Prog. Electromagn. Res. B 40 (2012) 79–99. [8] J. Jezný, M. Čurilla, Position measurement with Hall effect sensors, Am. J. Mech. Eng. 1 (2013) 231–235. [9] M.H. Kang, B.W. Choi, K.C. Koh, J.H. Lee, G.T. Park, Experimental study of a vehicle detector with an AMR sensor, Sens. Actuat. A 118 (2005) 278–284. [10] M. Diaz-Michelena, Small magnetic sensors for space applications, Sensors (Basel) 9 (2009) 2271–2288. [11] L. Jogschies, D. Klaas, R. Kruppe, J. Rittinger, P. Taptimthong, A. Wienecke, L. Rissing, M.C. Wurz, Recent developments of magnetoresistive sensors for industrial applications, Sensors (Basel) 15 (2015) 28665–28689. [12] V. Markevicius, D. Navikas, M. Zilys, D. Andriukaitis, A. Valinevicius, M. Cepenas, Dynamic vehicle detection via the use of magnetic field sensors, Sensors (Basel) 16 (2016). [13] X. Sun, S.M. Felton, R.J. Wood, S. Kim, Printing angle sensors for foldable robots, in Intelligent Robots and Systems (IROS), IEEE/RSJ International Conference On (2015) 1725–1731. [14] T. Hahn, K. Schmidt, B. Olberts, F. Romera, Development of a magneto-resistive angular position sensor for space mechanisms, Proceedings of the 43rd Aerospace Mechanisms Symposium (2016). [15] C. Giebeler, D. Adelerhof, A. Kuiper, J. Van Zon, D. Oelgeschläger, G. Schulz, Robust GMR sensors for angle detection and rotation speed sensing, Sens. Actuat. A 91 (2001) 16–20. [16] W.J. Fleming, New automotive sensors-A review, IEEE Sens. J. 8 (2008) 1900–1921. [17] J. Mintenbeck, R. Estaña, H. Woern, Design of a modular, flexible instrument with integrated DC-motors for minimal invasive robotic surgery, Advanced Intelligent Mechatronics (AIM), 2013 IEEE/ASME International Conference on (2013) 1249–1254. [18] R. Slatter, New magnetoresistive sensor in developments for angle, position and speed measurement in small-and micro-sized actuators, IKMT 2015; 10. ETG/GMM-Symposium Innovative Small Drives and Micro-Motor Systems; Proceedings of (2015) 1–6. [19] T.J. Moran, E.D. Dahlberg, Magnetoresistive sensor for weak magnetic fields, Appl. Phys. Lett. 70 (1997) 1894. [20] D.J. Adelerhof, W. Geven, New position detectors based on AMR sensors, Sens. Actuat. A 85 (2000) 48–53. [21] J. Czajkowski, P. Kinnunen, K. Haapanen, J. Niinimäki, T. Fabritius, Simultaneous magnetic actuation and observation with ferromagnetic sensors, Meas. Sci. Technol. 27 (2016) 025301 (p). [22] P. Dimitrova, S. Andreev, L. Popova, Thin film integrated AMR sensor for linear position measurements, Sensor Actuat. A: Phys. 147 (2008) 387–390. Y. Guo et al. / Sensors and Actuators A 263 (2017) 159–165 [23] A. Witschnig, B. Schaffer, J. Zimmer, A fully monolithic integrated anisotropic magnetoresistance based angle sensor for automotive, 2013 Transducers & Eurosensors XXVII: The 17th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS & EUROSENSORS XXVII) (2013) 2257–2260. [24] A. Zambrano, H.G. Kerkhoff, Determination of the drift of the maximum angle error in AMR sensors due to aging, Mixed-Signal Testing Workshop (IMSTW), 2016 IEEE 21st International (2016). [25] R.W. McCallum, L. Lewis, R. Skomski, M.J. Kramer, I.E. Anderson, Practical aspects of modern and future permanent magnets, Annu. Rev. Mater. Res. 44 (2014) 451–477. [26] J. Groenland, C. Eijkel, J. Fluitman, R. de Ridder, Permalloy thin-film magnetic sensors, Sens. Actuat. A 30 (1992) 89–100. [27] B.D. Cullity, C.D. Graham, Introduction to Magnetic Materials, John Wiley & Sons, 2011. [28] D.O. Smith, Anisotropy in nickel-iron films, J. Appl. Phys. 32 (1961) S70. [29] A. García-Arribas, E. Fernández, A.V. Svalov, G.V. Kurlyandskaya, A. Barrainkua, D. Navas, J.M. Barandiaran, Tailoring the magnetic anisotropy of thin film permalloy microstrips by combined shape and induced anisotropies, Eur. Phys. J. B 86 (2013) 1–7. [30] N.V. Alzola, G. Kurlyandskaya, A. Larrañaga, A. Svalov, Structural peculiarities and magnetic properties of FeNi films and FeNi/Ti-based magnetic nanostructures, IEEE Trans. Magn. 48 (2012) 1605–1608. [31] A.V. Svalov, A. Larrañaga, G.V. Kurlyandskaya, Effect of Ti seed and spacer layers on structure and magnetic properties of FeNi thin films and FeNi-based multilayers, Mater.Sci. Eng.: B 188 (2014) 102–105. [32] W. Lee, M. Toney, D. Mauri, High magnetoresistance in sputtered permalloy thin films through growth on seed layers of (Ni/sub 0.81/Fe/sub 0.19/)/sub 1-x/Cr/sub x, IEEE trans. magn. 36 (2000) 381–385. [33] A. Hubert, R. Schäfer, Magnetic Domains: the Analysis of Magnetic Microstructures, Springer Science & Business Media, 2008. [34] J.M. Coey, Magnetism and Magnetic Materials, Cambridge University Press, 2010. 165 [35] A. Aharoni, Demagnetizing factors for rectangular ferromagnetic prisms, J. Appl. Phys. 83 (1998) 3432 (p). Biographies Yue Guo obtained his Ph.D. in Electrical Engineering from Stanford University in January 2017. His research includes advanced piezoresistive and magnetoresistive sensors for different industrial applications. Yong Deng received his B.S. degree in chemistry from University of Science and Technology of China in 2015. He is currently a PhD candidate in the Department of Materials Science and Engineering at Stanford University. His research includes magnetoresistive and magnetostrictive materials. Shan X. Wang obtained his Ph.D. in Electrical and Computer Engineering from CMU in 1993. He is a Professor and Associate Chair of Materials Science & Engineering and jointly Professor of Electrical Engineering at Stanford University, and by courtesy, a Professor of Radiology at Stanford School of Medicine. He directs the Center for Magnetic Nanotechnology, and is a co-Principal Investigator of the Center for Cancer Nanotechnology Excellence for Translational Diagnostics (CCNE-TD) at Stanford University. He has over 250 publications, and holds 54 issued or pending patents in the area of magnetic nanotechnology, biosensors, nanofabrication, spintronics, power management and information storage. He is a scientific founder of MagArray Inc. and serves on the advisory boards of Nvigen Inc. and several other companies. He is elected a Fellow of the Institute of Electrical and Electronics Engineers (IEEE) and a Fellow of American Physical Society (APS) for his seminal contributions to magnetic materials and nanosensors. He has been recognized by numerous other honors and awards, including an Inaugural Frederick Terman Fellowship, a Distinguished Award in Nokia Sensing XCHALLENGE, and a finalist in Qualcomm Tricorder XPrize competition.