NAME:
Math 636: Algebraic Topology III
Final Exam, 6 June 2016
Please give yourself three hours to complete this exam, and return it by noon on
Friday, 10 June. No external materials are permitted.
1. For which values of n is RP n is orientable?
SOLUTION: Since RP n is a compact, connected, n-manifold, it is orientable if and only if
Hn (RP n ; Z) ∼
= Z. By writing down a cell structure and computing the homology directly, we
see that this happens when n is odd or n = 0.
2. Let Mn be the space of n × n real matrices, let I ∈ O(n) be the identity matrix, and let
O(n) := {A ∈ Mn | AAt = I}.
a) Show that O(n) is a manifold and compute its dimension.
(Hint: What is the range of the function f (A) = AAt ?)
SOLUTION: Let Sn be the vector space of n × n symmetric matrices, and let f : Mn → Sn
be as above. Then dfA (B) = At B + B t A. Suppose that f (A) = I. For any C ∈ Sn , we have
dfA (AC/2) = At AC/2 + CAt A/2 = C,
so dfA is surjective. Thus O(n) = f −1 (I) is a manifold of dimension dim Mn − dim Sn =
b) Compute the tangent space TI O(n).
SOLUTION: We have TI O(n) = ker dfI = {B | B + B t = 0}.
n
2
.
3. Let M be a compact manifold, N a connected manifold, and f : M → N a submersion. Show
that f is surjective.
SOLUTION: Since every submersion locally looks like a coordinate projection, it takes open
sets to open sets, hence f (M ) is open. Since M is compact, so is f (M ), hence f (M ) is closed.
Since N is connected, f (M ) is either equal to N or it is empty. Thus, if M is not empty, then f is
surjective. (The problem is wrong as stated, because I forgot to assume that M is not empty!)
4. Let M be a connected manifold of dimension n, and consider any nonempty subset ∅ =
6 A ⊂ M.
Show that the map Hn (M r A) → Hn (M ) is zero.
SOLUTION: We may assume that M is compact and orientable, for otherwise Hn (M ) = 0.
Choose a point p ∈ A, and consider the maps
Hn (M r A) → Hn (M r {p}) → Hn (M ) → Hn (M, M r {p}).
Since M is orientable, the last map is an isomorphism. By exactness at Hn (M ), the middle map is
zero. The map from Hn (M r A) to Hn (M ) is equal to the composition of the first two maps, so it
is also zero.
5. Consider the space
X := T 2
[
RP 2 ,
S1
where S 1 includes into T 2 as a meridian and S 1 ∼
= RP 1 includes into RP 2 in the usual way. Show
that X is not homotopy equivalent to any compact manifold.
SOLUTION: Using the Mayer-Vietoris sequence, we may compute that H0 (X) ∼
= Z, H1 (X) ∼
= Z⊕Z2 ,
H2 (X) ∼
= Z, and Hi (X) = 0 for i > 2. Suppose that X is homotopy equivalent to a compact
n-manifold M . Since H0 (X) ∼
= Z, M is nonempty and connected.
If M is orientable, then its top nonvanishing homology group lies in dimension n, so n = 2. But
we showed that the degree n − 1 homology of a compact, orientable, n-manifold is torsion-free, so
this cannot be the case.
If M is not orientable, then its top nonvanishing homology group lies in dimension n − 1, and
the torsion subgroup of this group is isomorphic to Z2 . This also cannot be the case.
6. Suppose that M is a compact, oriented, connected, 5-dimensional manifold with H1 (M ) ∼
= Z2
∼
and H2 (M ) = Z. Compute H3 (M ).
SOLUTION: By Poincaré duality, H3 (M ) ∼
= H 2 (M ). By the universal coefficient theorem, this is
isomorphic to Hom(H2 (M ), Z) ⊕ Ext(H1 (M ), Z) ∼
= Z ⊕ Z2 .
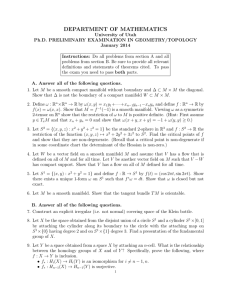
7. Let K1 and K2 be a pair of linked circles in S 3 . Let C1 and C2 be small circles that link with K1
and K2 , as shown in the diagram. Let D1 and D2 be disks with boundary K1 and K2 . (I will not
attempt to draw these disks on the picture, but you can assume that they are embedded in S 3 in
the obvious way.)
Let X := S 3 r K1 ∪ K2 . Let T ⊂ X be a torus “encircling” K1 . More precisely, let T be
the boundary of a small tubular neighborhood of K1 in R3 . For purposes of visualization, you should
imagine C1 as a meridian of T , and T as the space obtained by “sweeping” C1 all the way around K1 .
Consider the classes
αi := (Di ∩ X) ∈ H 1 (X; Z2 ),
βi := [Ci ] ∈ H1 (X; Z2 ),
and
γ := [T ] ∈ H2 (X; Z2 )
(we work with Z2 coefficients so as to avoid having to worry about orientations and coorientations).
a) Show that {α1 , α2 } is a basis for H 1 (X; Z2 ). (Hint: First show that H 1 (X; Z2 ) is 2-dimensional,
and then show that α1 and α2 are linearly independent.)
SOLUTION: By Alexander duality, H 1 (X; Z2 ) ∼
= H 1 (K1 ∪ K2 ; Z2 ) ∼
= Z2 ⊕ Z2 . Since Di intersects Ci transversely in a single point and C1 ∩ D2 = ∅ = C2 ∩ D1 , we have hαi , βj i = δij , hence α1
and α2 are linearly independent.
b) Show that α1 ^ α2 6= 0.
SOLUTION: Since D1 ∩ X and D2 ∩ X intersect transversely, we have α1 ^ α2 = (D1 ∩ D2 ∩ X).
Since D1 ∩ D2 ∩ X intersects T transversely in a single point, we have hα1 ^ α2 , γi = 1, so
α1 ^ α2 6= 0.
c) What changes if K1 and K2 are replaced by two circles that are not linked? Use your analysis to
show that the complement of two linked circles is not homotopy equivalent to the complement of
two unlinked circles.
SOLUTION: Part (a) goes through unchanged, but now D1 ∩ D2 ∩ X = ∅, so α1 ^ α2 = 0.
This implies that there are no nontrivial cup products between classes of degree 1, so the two spaces
cannot be homotopy equivalent.