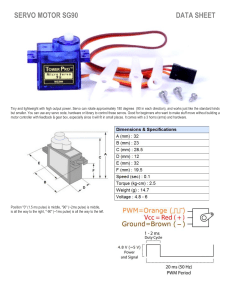
Hand Motion Controlled Robotic Arm Hamza Mohammad - 1MS19EI021 Imran Ahmed Khan – 1MS19EI026 Mohammad Ayyan Anees – 1MS19EI035 Ravi Chaturvedi – 1MS19EI042 Abstract As robotics is one of the emerging technologies this project presents the design and development of a hand motion controlled robotic arm using flex sensors and an MPU6050 sensor the system allows for intuitive control of robotic arm using hand movement enabling more natural and efficient interaction with the robot. The flex sensor are used to detect the bending of the fingers whereas the MPU6050 detects the orientation and movement of the hand these movements are translated into the movements of the robotic arm. Studies have shown this technique of controlling the robotic arm has potential to be used in various application such as medical rehabilitation manufacturing assembly line processes military and defense or even entertainment Objectives 1. To construct a 5 DOF robotic arm. 2. To make a glove module with flex sensors and accelerometer and gyroscope. 3. To be able to translate 6 hand movements into robotic arm movements D eliverables 1. Integration of glove module with 5-DOF robotic arm. 2. Obtaining forward, backward and tilting movement using the accelerometer. 3. Opening and closing of the robotic gripper via flex sensors. Block Diagram Circuit Diagram Glove Subsystem Glove Subsystem Circuit Diagram Flex Sensor Flex sensor Readings MPU6050 MPU6050 Readings Robotic Arm Subsystem Gripper Wrist Elbow Shoulder Base Initialisation The initial position of each motor as the glove subsystem is calibrated to zero degrees is as follows Servo Motor Variable Name Initial Position Servo Motor -1 (Base) angleZ 𝜃 = 160° Servo Motor -2 (Shoulder) angleY 𝜃 = 90° Servo Motor -3 (Elbow) angleX 𝜃 = 120° Servo Motor -4 (Wrist) mapflex2 𝜃 = 60° Servo Motor -5 (Gripper) mapflex1 𝜃 = 30° Mapping The map( ) function is a function used to map a value from one range of values to another range of values. Syntax : map(value, fromLow, fromHigh, toLow, toHigh) Servo Motor Sensor Input Motor Output Servo Motor -1 (Base) 0 ≤ Z ≤ 60 0° ≤ 𝜃 ≤ 160° Servo Motor -2 (Shoulder) 0 ≤ Y ≤ 60 0° ≤ 𝜃 ≤ 90° Servo Motor -3 (Elbow) −60 ≤ X ≤ 0 90° ≤ 𝜃 ≤ 180° Servo Motor -4 (Wrist) 20 < mapflex2 < 30 30 < mapflex2 < 50 𝜃 = 180° 𝜃 = 0° Servo Motor -5 (Gripper) mapflex1 > 25 mapflex1 < 25 𝜃 = 180° 𝜃 = 30° Robotic Arm Subsystem Thank You