MODFLOW for Transient Hydraulic Head in Coastal Aquifers
advertisement

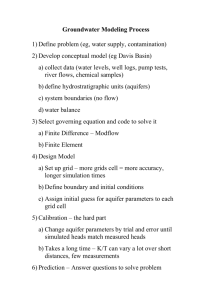
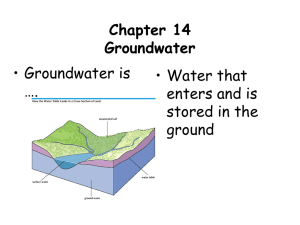
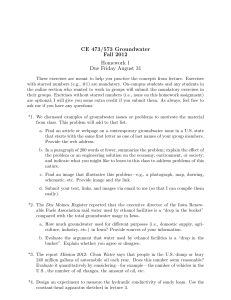
HYDROLOGICAL PROCESSES Hydrol. Process. 29, 2052–2064 (2015) Published online 1 October 2014 in Wiley Online Library (wileyonlinelibrary.com) DOI: 10.1002/hyp.10354 Using MODFLOW code to approach transient hydraulic head with a sharp-interface solution Carlos Llopis-Albert1* and David Pulido-Velazquez2,3 Instituto Geológico y Minero de España (IGME), C/ Cirilo Amorós, 42 – Entreplanta, 46004 Valencia, Spain Instituto Geológico y Minero de España (IGME), Urb. Alcázar del Genil, 4-Edif. Zulema, Bajo, 18006 Granada, Spain Departamento de Ciencias Politécnicas, Escuela Universitaria Politécnica, UCAM Universidad Católica San Antonio de Murcia, Murcia, Spain 1 2 3 Abstract: Saltwater intrusion problems have been usually tackled through analytical models because of its simplicity, easy implementation and low computational cost. Most of these models are based on the sharp-interface approximation and the Ghyben–Herzberg relation, which neglects mixing of fresh water and seawater and implicitly assumes that salt water remains static. This paper provides insight into the validity of a sharp-interface approximation defined from a steady state solution when applied to transient seawater intrusion problems. The validation tests have been performed on a 3D unconfined synthetic aquifer, which include spatial and temporal distribution of recharge and pumping wells. Using a change of variable, the governing equation of the steady state sharp-interface problem can be written with the same structure of the steady confined groundwater flow equation as a function of a single potential variable (ϕ). We propose to approach also the transient problem solving a single potential equation (using also the ϕ variable) with the same structure of the confined groundwater flow equation. It will allow solving the problem by using the classical MODFLOW code. We have used the parameter estimation model PEST to calibrate the parameters of the transient sharp-interface equation. We show how after the calibration process, the sharp-interface approach may provide accurate enough results when applied to transient problems and improve the steady state results, thus avoiding the need of implementing a density-dependent model and reducing the computational cost. This has been proved by comparing results with those obtained using the finite difference numerical code SEAWAT for solving the coupled partial differential equations of flow and densitydependent transport. The comparison was performed in terms of piezometric heads, seawater penetration, transition zone width and critical pumping rates. Copyright © 2014 John Wiley & Sons, Ltd. KEY WORDS seawater intrusion; analytical solutions; sharp interface; coastal aquifers; critical pumping rates; Ghyben–Herzberg; calibration Received 5 March 2014; Accepted 2 September 2014 INTRODUCTION Salt water intrusion (SWI) occurs in coastal freshwater aquifers when the different densities of both the saltwater and freshwater allow the salt water to intrude into the freshwater aquifer. These aquifers are usually supporting large populations, irrigated agriculture and industrial areas, so that the demand of groundwater withdrawal may exceed the recharge rate, thus favouring the SWI. The encroaching seawater will encounter an area known as the transition zone, where the freshwater and saltwater mix and form an interface. The unknown concentration of the fluid within the transition zone makes the problem complex (Bear, 1999). In addition, the interface moves back and forth through time naturally because of *Correspondence to: Carlos Llopis-Albert, Instituto Geológico y Minero de España (IGME), C/ Cirilo Amorós, 42 – Entreplanta, 46004 Valencia, Spain. E-mail: cllopisa@gmail.com Copyright © 2014 John Wiley & Sons, Ltd. fluctuations in the recharge and pumping rates. The seawater intrusion processes, recent advances and future challenges were investigated in Werner et al. (2013), while the effect of climate change on sea water intrusion was analysed by Sherif and Singh (1999). The scarcity of reliable estimates of parameters and variables and the computational burden in most real cases prevents the use of variable-density models (Sreekanth and Datta, 2010). Furthermore, the computational burden implies a major disadvantage in coupled management simulation–optimization models for control and remediation of SWI due to multiple calls of the simulation model by the optimization algorithm (Dhar and Datta, 2009). Then SWI problems are usually tackled by common simplifications such as the sharp-interface approach and the Ghyben–Herzberg relation because of its simplicity in terms of required parameters and computational burden. On the one hand, the sharp-interface approach entails that there is no mixing between fresh and salt water, which is one of the most distinctive features of SWI and its USING MODFLOW TO APPROACH TRANSIENT HEAD WITH A SHARP INTERFACE associated dynamics (Henry, 1964; Bear, 1979). On the other hand, the Ghyben–Herzberg relation can be applied when the interface is practically stabilized, which means steady state flow conditions (Essaid, 1999). Through such approximations, several authors derived or applied analytical solutions to deal with SWI problems in coastal aquifers (Strack, 1976; Mahesha, 1996; Iribar et al., 1997; Dagan and Zeitoun, 1998; Cheng and Ouazar, 1999; Naji et al., 1999; Sakr, 1999; Cheng et al., 2000; Mantoglou, 2003; Mantoglou et al., 2004; Park and Aral, 2004; Masciopinto, 2006; Paster et al., 2006; Mantoglou and Papantoniou, 2008; Pool and Carrera, 2011; Shi et al., 2011; Mas-Pla et al., 2013). The sharp-interface approach for steady state flow conditions can be solved using single-density groundwater codes using a change of variable (e.g., Mantoglou, 2003; Bakker and Schaars, 2013). In this sense, the wellknown MODFLOW code can be used (McDonald and Harbough, 1988). The changes of variable are common technique to solve groundwater flow problems with numerical and analytical solutions (Pulido-Velazquez et al., 2006, 2007a, b; Capilla et al., 2009). Although the MODFLOW code is not the most appropriate to modelling coastal aquifer, it is still very employed to asses some management alternatives in these aquifers (e.g., van Camp et al., 2013). Finally, a sensitivity analysis of the validity of the sharpinterface approach for steady state flow conditions and with regards to groundwater flow and mass transport parameters was developed by Llopis-Albert and Pulido-Velazquez (2013). Different scenarios of spatially distributed recharge values and spatial wells placement were analysed in this work. This paper goes a step further by discussing the validity of a sharp-interface approach, based on the Ghyben– Herzberg relation, when extended to deal with transient flow conditions. Furthermore, the sharp-interface equation is solved using MODFLOW, thus easing the implementation of the model. A few works have dealt with transient SWI problems using the sharp-interface approach, although the equation is not solved using directly MODFLOW (Eichert et al., 1982; Essaid, 1999; Cartwright et al., 2004; Bakker et al., 2013). Then, Essaid (1999) presented the SHARP model, which is a quasi three-dimensional, numerical model that solves by a finite difference scheme the equations for coupled freshwater and saltwater flow separated by a sharp interface in layered coastal aquifer systems. Each aquifer is represented by a layer in which flow is assumed to be horizontal. Cartwright et al. (2004) developed a sharpinterface model to examine and quantify the response of the salt–freshwater interface in a coastal aquifer to a wave-induced groundwater pulse. Bakker et al. (2013) developed the seawater intrusion (SWI2) package for MODFLOW. This package is based on the Dupuit Copyright © 2014 John Wiley & Sons, Ltd. 2053 approximation. It does not account for diffusion and dispersion and has no need for vertical discretization of the aquifer since the water is discretized into zones of different densities. A comparison between SWI package and SEAWAT was also performed by Dausman et al. (2010). The comparison led to successful results, and it was determined that when the diffusion and dispersion effects are important the use of the SWI package is discouraged. The main difference of the present work regarding previous models dealing with transient sharp-interface solutions is that we propose to solve a governing equation with the same structure of the steady confined groundwater flow equation as a function of a single potential variable (ϕ). It would allow a direct use of MODFLOW (without requiring any additional package integrated into it). Then this approach allows that already developed groundwater flow models can be directly used to tackle SWI problems by means of its well-known graphical interfaces with only a simple change of variables in some parameters of the groundwater flow equation. This will ease the implementation of SWI problems for a large number of modellers who are only familiar with the use of MODFLOW as presented in its graphical interfaces. It will also allow a direct integration of SWI problems into already developed groundwater management models based on MODFLOW simulation (e.g., Pulido-Velazquez et al., 2008; Llopis-Albert et al., 2014 using the code GWM (Ahlfeld et al., 2005). The Eigenvalue Method techniques could be also applied to obtain an efficient conceptual solution (PulidoVelazquez et al., 2007b) of the confined governing equation. Therefore, it could be directly employed to solve the proposed approximation to integrate coastal aquifers in complex river basin management models (with many elements and aspects to be analysed) (PulidoVelazquez et al., 2007b, 2011a, b). Furthermore, this approach also allows the direct integration of SWI problems into already developed models for dealing with optimal contamination remediation, conjunctive use and groundwater management strategies and designs (e.g., GWM (Ahlfeld et al., 2005), SOMOS (Peralta , 2004) or MGO (Zheng and Wang, 2003). In addition, different transient tests regarding spatial and temporal distribution of recharge and pumping wells has been simulated. The validation tests have been performed on a 3D unconfined synthetic aquifer, thus allowing taking control of all variables and parameters. The hydrological parameters of the potential steady equation can be obtained after a transformation of their counterparts parameters in the flow equation, which provides the fresh piezometric head (h). But the additional parameters introduced to approach the variability of the solution in the time have to be calibrated. We will show that the proposed sharp-interface approach may provide accurate enough results when Hydrol. Process. 29, 2052–2064 (2015) 2054 C. LLOPIS-ALBERT AND D. PULIDO-VELAZQUEZ applied to transient problems. This has been proved by comparing the results of the sharp-interface approach with those obtained using the finite difference numerical code SEAWAT for solving the coupled partial differential equations of flow and density-dependent transport. The comparison was performed in terms of piezometric heads, seawater penetration, transition zone width and critical pumping rates. Furthermore, this work also shows how results are improved under steady state conditions; that is, piezometric heads are closer to those provided by densitydependent transport models after the calibration process. MATERIALS AND METHODS As abovementioned, we compare a sharp-interface solution based on the Ghyben–Herzberg approach with a numerical three-dimensional variable-density flow simulations. The governing equation of the sharp-interface approach (a potential equation deduced from a change of variable with the same structure of the confined groundwater flow equation) is solved using the numerical flow model MODFLOW (McDonald and Harbough, 1988; Harbaugh et al., 2000), whereas the variable-density flow simulations are solved using SEAWAT (Guo and Langevin, 2002). The hydrological parameters of the steady equation of the sharp-interface solution are obtained after a transformation of their counterparts parameters in the flow equation, which provides the fresh piezometric head (h). Note that the hydraulic conductivity (K) of the sharp-interface equation (Equation (2)) is the hydraulic conductivity (K′) of the groundwater flow equation divided by d (the distance between the aquifer base and the sea level; see Figure 1) (Mantoglou, 2003). But the additional parameters introduced to approach the variability of the solution in the time need to be calibrated. Then the specific storage of the porous medium (Ss) of the sharp-interface equation (Equation (2)) is not the storage of the aquifer (Ss′) used to calibrate flow models, and no equation is available to state their relationship. Finally, in order to perform a sensitivity analysis and taking into account that K can vary spatially by several orders of magnitude (e.g., Llopis-Albert and Capilla, 2009, 2010a, b), we will also compare these results with those obtained calibrating also K. The conditional data are the piezometric heads (h) obtained from solving the flow equation, which after a transformation (Equation (1)) provides the potential flow (ϕ) of the sharp-interface equation to be calibrated. The calibration of the parameters of the sharp-interface governing equations is carried out by means of the inverse model PEST (Doherty, 2004). This paper is intended to show how the proposed sharp-interface approximation may provide accurate enough results when applied to transient simulations. The validity of the sharpinterface approach in transient simulations is defined in terms of piezometric heads, seawater penetration, transition zone width and critical pumping rates. In addition, the use of the numerical model MODFLOW ease the implementation of the sharp-interface approach in coupled management simulation–optimization models for control and remediation of SWI, thus reducing the computational burden that prevents the use of variabledensity models. The governing equations of such approaches are following presented: Governing equations based on a single potential formulation The single potential formulation implies some simplifications of the SWI problem in coastal aquifers. The sharpinterface assumption neglects mixing of fresh water and seawater (Henry, 1964; Bear, 1979). In addition, the interface is considered to be practically stabilized, so that steady state flow conditions are required to be applied (Essaid, 1999). The Dupuit hydraulic assumption is used to obtain two-dimensional equations, by averaging the flow equation in vertical direction. The depth of the interface below the sea level (ξ) is deduced from the Ghyben– Herzberg relation (Figure 1), whereas the freshwater depth from the free surface to the interface is represented by b. By means of such assumptions, Strack (1976) derived a singlepotential theory across the saltwater and freshwater zones. Many other authors have used this formulation more recently (e.g., Cheng and Ouazar, 1999; Cheng et al., 2000; Mantoglou, 2003; Mantoglou et al., 2004; Park and Aral, 2004). The flow potential ϕ for an unconfined aquifer is defined as follows: Zone 1 : Figure 1. Cross section of an unconfined coastal aquifer and parameters of the sharp-interface approach Copyright © 2014 John Wiley & Sons, Ltd. Zone 2 : i 1h 2 hf ð1 þ δÞ d 2 2 2 ð 1 þ δÞ ϕ¼ hf d 2δ ϕ¼ (1) Hydrol. Process. 29, 2052–2064 (2015) 2055 USING MODFLOW TO APPROACH TRANSIENT HEAD WITH A SHARP INTERFACE ρ ρ where δ ¼ sρ f ¼ Δρ ρf ≈ 0:025 being ρs and the density of f salt water and freshwater, respectively; hf is the freshwater piezometric head with reference to the impermeable bottom of the aquifer ρf; and d is the height of the aquifer from the horizontal aquifer base to the sea level. In this paper, we propose to approach also the transient problem solving a single potential equation (using also the ϕ variable) with the same structure of the confined groundwater flow equation. Eventually, the differential equation to be solved either by analytical or numerical approximations is ∂ ∂ϕ ∂ ∂ϕ ∂ϕ K þ K þ N Q ¼ Ss ∂x ∂x ∂y ∂y ∂t (2) This equation is not deduced mathematically in a formal way. It is only based on the fact that the potential equation deduced by Strack (1976), which is analogous to the confined groundwater flow equation, provides good approximations for steady state SWI problems. So, we propose to add a term to approach the variability on the time, maintaining the structure of the potential confined equation. Therefore, we pursue to provide insight about the validity of this equation by comparing results with a densitydependent model for a set of different transient simulations, which include spatial and temporal distribution of recharge and pumping wells. The equation is solved as a one-zone problem through the use of proper boundary conditions. The parameters of this equation are the specific storage of the sharp approximation (different to the real porous medium) (Ss); the hydraulic conductivity of the sharp approximation (that can be deduced from the hydraulic conductivity and the distance d, as was mentioned previously) (K), the recharge distributed over the surface of the aquifer (N) and the pumping rate from the aquifer wells (Q). We have used the finite difference groundwater flow model MODFLOW (McDonald and Harbough, 1988) to solve Equation (2). The interface location ξ is calculated as follows: Zone 1 : ξ ¼ d; z ¼ 0; Zone 2 : rffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi 2ϕ ξ¼ ; ð1 þ δÞδ when z ¼ d ξ; ð1 þ δÞδ 2 d ≤ϕ 2 when 0 ≤ ϕ ≤ ð1 þ δÞδ 2 d 2 (3) Copyright © 2014 John Wiley & Sons, Ltd. Accordingly, the piezometric hf is determined from Zone 1 : qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi hf ¼ 2ϕ þ ð1 þ δÞd 2 ; when Zone 2 : rffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi 2δϕ hf ¼ þ d; ð 1 þ δÞ when ð1 þ δÞδ 2 d ≤ϕ 2 0≤ϕ≤ ð1 þ δÞδ 2 d 2 (4) The toe of saltwater wedge (τ) is located at ξ = d (Figure 1). From Equation (4), this means that the toe is located where ϕ takes the following values: ϕ ðxτ ; yτ Þ ¼ ð1 þ δÞδ 2 d 2 (5) Governing equations for flow and transport in SEAWAT The coupled partial differential equations for variabledensity flow and transport are solved by means of the three-dimensional finite difference numerical code SEAWAT (Guo and Langevin, 2002). It considers multispecies solute and heat transport, together with the effect that fluid viscosity variations have on resistance to groundwater flow. The SEAWAT model comprises MODFLOW (McDonald and Harbough, 1988) and MT3DMS (Zheng and Wang, 1999) into a single program that conserves fluid mass, rather than fluid volume, while considers equivalent freshwater head as the primary dependent variable. Additionally, there are well-known preprocessors and postprocessors of such programs to ease the process to create SEAWAT datasets and visualize results. SEAWAT iteratively solves the coupled partial differential equations on account of groundwater flow causes the redistribution of solute concentration, which leads to alter the density field, and therefore, the groundwater movement. On the one hand, the groundwater flow is calculated in MODFLOW from freshwater head gradients and relative density–difference terms. On the other hand, the resulting groundwater flow field is used for the solute transport model MT3DMS. It takes into account the processes of advection, molecular diffusion and mechanical dispersion. Eventually, an updated density field is calculated from the new solute concentrations and incorporated back into MODFLOW as relative density–difference terms. In this way, the coupling between flow and transport is carried out through a synchronous time stepping approach that cycles between solutions of flow and transport models. The formulation of the partial differential equation for variable-density groundwater flow in porous media is Hydrol. Process. 29, 2052–2064 (2015) 2056 C. LLOPIS-ALBERT AND D. PULIDO-VELAZQUEZ subsequently presented (Langevin et al., 2007): μ0 ρ ρ0 ∇z ∇· ρ K 0 ∇h0 þ μ ρ ¼ ρSs;0 (6) ∂h0 ∂ρ ∂C þθ ρs q′s ∂t ∂C ∂t with ρ0 μ K0 h0 Ss,0 t θ C q′s the fluid density [ML3] at the reference concentration and reference temperature dynamic viscosity [ML1 T1] hydraulic conductivity tensor of material saturated with the reference fluid [LT1] hydraulic head [l] measured in terms of the reference fluid (commonly freshwater) of a specified concentration and temperature. specific storage [l1], defined as the volume of water released from storage per unit volume per unit decline of h0 time [T] porosity [–] salt concentration [ML3] source or sink [T1] of fluid with density ρs The transport of solute mass in SEAWAT is formulated by the following partial differential equation (Langevin et al., 2007): ρb K kd ∂ θC k 1þ ¼ ∇· θD·∇C k ∇· qC k θ ∂t q′s qCks (7) with ρb K kd Ck D q C ks bulk density (mass of the solids divided by the total volume) [ML3] distribution coefficient of species k [L3 M1] concentration of species k [ML3] hydrodynamic dispersion coefficient tensor [L2T1] specific discharge [LT1] source or sink concentration [ML3] of species k Parameter estimation process using PEST The hydrological parameters of the steady equation of the sharp-interface solution are obtained after a transformation of their counterparts parameters in the flow equation. Furthermore, when extending the solution to transient problems, there is no equation to state the relationship between the specific storage of the porous medium (Ss) of the sharp-interface equation (Equation (2)) and the storage of the aquifer (Ss′) of the groundwater flow Copyright © 2014 John Wiley & Sons, Ltd. equation. In addition, in order to perform a sensitivity we will also compare results with those obtained calibrating also K. To spatially calibrate these hydrogeological parameters of the sharp-interface equation, we have used the parameter estimation model PEST (Doherty, 2004) (i.e., the hydraulic conductivity and the storage coefficient of Equation (2)). The aim is to report the same transient piezometric field (h) as that given by the flow equation after reversing the transformation once the sharp-interface equation is solved. PEST is a nonlinear parameter estimation procedure that is based on calculating the mismatch, in the least squares sense, between the simulated values (given by the approximation using the finite difference groundwater flow equation or its equivalent single potential formulation) and the observed values, and then evaluating how best to correct that mismatch. Subsequently, after solving the groundwater flow equation, the fresh piezometric head (hm) is transformed into the flow potential (ϕ) using Equation (1). Consequently, these values are used as conditional data of the sharp-interface model to be calibrated. Finally, the PEST model adjusts model input data and runs the model again until a defined maximum number of optimization iterations are reached or a convergence criterion is achieved. With the calibrated parameters, we will prove that a better approximation between the results of the sharp-interface model and the SEAWAT model are achieved. This comparison is performed in terms of seawater penetration, transition zone width and critical pumping rates. The final goal is to show that after the calibration process the sharp-interface approach may be extended to transient conditions while providing accurate enough results. Because of the implementation of the parameter estimation algorithm (Gauss–Marquardt–Levenberg algorithm), the calibration process is performed with high computational efficiency. It is based on an iterative process implying a linearization of the relationship between model parameters and model-generated observations using a Taylor expansion about the currently best parameter set. This entails to obtain the derivatives of all observations with respect to all parameters. After solving the problem, a better parameter set is obtained, and the new parameters tested by running the model again. Therefore, the problem is to minimize the following objective function (ϕ): ϕ ¼ ðc co Jðb bo ÞÞt Qðc co Jðb bo ÞÞ (8) where c co is the experimental observation vector is the model-calculated observation vector Hydrol. Process. 29, 2052–2064 (2015) USING MODFLOW TO APPROACH TRANSIENT HEAD WITH A SHARP INTERFACE J Q b bo u = (b bo) is the Jacobian matrix. Jij is the derivative of the i’th observation with respect to the j’th parameter is the observation weights matrix (square and diagonal) whose i’th diagonal element qii is the square of the weight wi attached to the ith observation is the new parameter vector is the current parameter vector is the parameter upgrade vector Applying the Taylor’s theorem, c ¼ co þ Jðb bo Þ (9) and the upgrade vector u becomes 1 u ¼ ðJt QJÞ Jt Qðc co Þ (10) Finally, the parameter covariance matrix is C ðbÞ ¼ σ 2 ðJt QJÞ 1 (11) where σ 2 represents the variance of each of the elements of c. NUMERICAL SIMULATIONS The numerical simulations have been carried out in a 3D unconfined synthetic aquifer for different scenarios of recharge and pumping. This situation represents many of the SWI problems in coastal aquifers (Gimenez and Morell, 1997; Gómez Gómez et al., 2003). The aim is to compare the transient solutions of the sharp-interface approach (based on the Ghyben–Herzberg relation) solved using the numerical model MODFLOW with those obtained solving the coupled partial differential equations of flow and density-dependent transport using the code SEAWAT. The comparison is performed in terms of piezometric heads, seawater toe penetration, transition zone width and critical pumping rates. Furthermore, we also compare the transient piezometric heads of the flow model with those obtained with the sharpinterface approach. We are intended to show how after the calibration process we can use the sharp-interface approach under transient situations, solved in MODFLOW, without the need of implementing a density-dependent model. This would make it appropriate to be integrated into groundwater and river basin management models (e.g., Pulido-Velazquez et al., 2008; Peña-Haro et al., 2010, 2011; Molina et al., 2013a,2013b; Llopis-Albert et al., 2014) while reporting the same piezometric field as the flow model and providing good results enough in terms of seawater toe Copyright © 2014 John Wiley & Sons, Ltd. 2057 penetration, transition zone width and critical pumping rates when compared to the density-dependent model. Additionally, this work is also intended to show how results are improved under steady state conditions after the calibration process. In order to define more precisely the conceptual model and to have a complete control of all parameters, a synthetic aquifer has been used. Then, the discrepancies caused by other sources different than the use of the two approaches are reduced. On the one hand, the coastal aquifer has been modelled with SEAWAT using a three-dimensional block-centred finite difference grid. A schematic cross section of the aquifer is depicted in Figure 2. All frontiers are defined with boundary conditions of no-flow are except the right one, which represents the sea in the coastal aquifer. The sea boundary has been defined with a prescribed head of 0 m. Transport boundaries of prescribed concentrations have also been defined. The left contour, which represents the freshwater boundary, has been defined with concentrations of 0 mg/l. The right contour, which represents the coastal boundary, has been defined with concentrations of 35 mg/l. The finite difference scheme of the model is made up of 61 columns and 60 rows in the horizontal plane, with a cell size of 25 × 25 m. Because the numerical experiment has been designed presenting symmetry with respect to the X axis only half of the domain is simulated. Hence, the domain extends over a size of 1500 m × 1500 m. SEAWAT requires transient simulations so that in order to compare its results with those obtained under steady state conditions in the sharp-interface approach, a large enough period of time has been simulated (25 years), which allows reaching flow steady state conditions at the aquifer. In order to ensure a good accuracy in the model results, some requirements are needed (Guo and Langevin, 2002). First, for models with an unconfined layer, the centre elevation for each cell in the upper layer should be slightly higher than the highest expected elevation of the water table. Second, the grid resolution in the vertical Figure 2. Cross section of the numerical test aquifer, boundary conditions and pumping and observation wells. The spatial location of the wells is as follows: W1 = row 11, column 17; W2 = row 20, column 17 Hydrol. Process. 29, 2052–2064 (2015) 2058 C. LLOPIS-ALBERT AND D. PULIDO-VELAZQUEZ direction requires a much greater level of detail to represent the complex flow patterns near areas of high concentration gradients. A vertical discretization of 10 layers has been used. The layers are defined as confined/unconfined layers, where the transmissivity varies, with a thickness of 10 m for the first layer and 0.5 m for the rest of them. Third, a spatially uniform cell volumes are defined, which are less prone to numerical instabilities than models designed with variable cell volumes. Therefore, the elevation of the bottom of the first layer is at 0 m, while it takes the value of 5 m for the layer number 10. Eventually, the aquifer has been defined with a large extend compared to its depth as required by the sharpinterface approach (Mantoglou and Papantoniou, 2008). A density of freshwater and seawater of 1000 kg/m3 and 1025 kg/m3 is defined, respectively. The slope of the linear equation of state that relates fluid density to solute concentration is defined as 0.7143. The hydraulic conductivity, specific storage, specific yield and effective porosity are defined accordingly to the calibrated values as explained below. The third-order TVD scheme was used to solve the advection, with a Courant number of 0.75. Dispersion values of 0.1 and 0.01 have been defined for the relations between the horizontal and vertical transverse dispersivity and the longitudinal dispersivity, respectively. The effective molecular diffusion has been considered as zero. On the other hand, the sharp-interface approach has been solved numerically using MODFLOW. A different vertical discretization with only one layer has been used, as required by this approach, of 5 m. The Preconditioned Conjugate Gradient with the modified Incomplete Cholesky method has been used to solve the flow problem. Table I presents the different cases analysed and also indicates parameters and stress periods where the recharge and pumping stresses are applied within the temporal discretization of the transient simulations. Parameters and recharge and pumping rates have been chosen to ensure that the toe of saltwater wedge falls inside the domain, thus allowing a better comparison between the two approaches. Four fully penetrating wells are considered, which are active or inactive depending on the case analysed. The spatial location of the pumping wells in terms of the number of row and column is, respectively, 11 and 17 for W1 and 20 and 17 for W2 (Figure 2). In addition, we have defined 36 observation boreholes, which information is used as conditional data (Figure 2). Therefore, for steady state simulations, 36 piezometric head values are used as conditional data in the parameter estimation process, whereas for transient simulations, two measures taken at each observation borehole and at different times are used, i.e., a total of 72 conditional data. These transient measurements were selected for covering the whole temporal horizon. The different cases cover a set of groundwater flow and mass transport parameters, and different scenarios of spatially distributed recharge values and spatial wells placement. The parameters of the sharp-interface equation (Equation (2)) have been jointly calibrated. Both homogeneous and heterogeneous estimated parameter fields have been obtained using PEST. For homogeneous cases only, one value of the hydraulic conductivity and the storage coefficient are jointly calibrated. For heterogeneous cases, the parameters to be calibrated are defined as strips parallel to the coast. Six strips or zones are considered to provide accurate enough results. Therefore, six calibrated values are obtained for steady state cases 1 and 3 (six values of hydraulic conductivity), while 12 calibrated values are obtained for transient cases 2 and 4 (six for the hydraulic conductivity and six for the storage coefficient). The sharp-interface approach due to its limitations does not consider longitudinal dispersion and vertical conductivity. The temporal discretization for transient simulations of both approaches is 25 years, where the simulation time unit are days. The initial heads (h) or flow potential (ϕ) in transient simulations has been defined as the flow conditions of the steady state cases. The critical pumping rates in coastal aquifers are defined as the maximum permissible discharge without Table I. Cases and parameters analysed Cases/Parameters 1 2 3 Recharge (mm/year) 20 80 Wells (m3/day) NO 40 ON–OFF each 6 months NO Layer thickness (m) Hydraulic conductivity (m/day) Specific storage (1/m) Specific yield Steady/Unsteady flow 5 10 – – Steady Copyright © 2014 John Wiley & Sons, Ltd. 5 10 0.001 0.05 Unsteady 62.5 W1 and W2 always activated 5 10 – – Steady 4 5 80 80 62.5 W1 and W2 62.5 W1 and W2 ON–OFF each 6 months ON–OFF each 6 months 5 variable 10 10 0.001 0.05 Unsteady 0.001 0.05 Unsteady Hydrol. Process. 29, 2052–2064 (2015) 2059 USING MODFLOW TO APPROACH TRANSIENT HEAD WITH A SHARP INTERFACE salinizing the well. On the one hand, for the densitydependent transport model, a 0.1% of mixing with seawater at the well is adopted as the salinization threshold in the density-dependent transport model (Pool and Carrera, 2011). Therefore, the toes of the interface for the sharp-interface approach were compared with the 0.1% isoconcentration lines of the density-dependent transport model. On the other hand, the critical pumping rates for the sharp-interface approach were defined as those where the X coordinate of the toe penetration match up with the stagnation point (xs; see Figure 1). The stagnation point (xs) is the point in the streamline that separates water flowing into the well from that flowing into the sea. When increasing the pumping rate at the well, the interface migrates landward and the stagnation point migrates seaward. Eventually they cross, seawater enters into the well capture zone and the well becomes salinized. Hence, the critical pumping rate Qc is reached when ξ = c and x = xs (Figure 1). This formulation leads critical pumping rates and toe penetrations to be calculated based on ‘potential constrains’. It protects the wells from intrusion by keeping a potential at the wells larger than the toe potential, as Þδ 2 shown by Equation (4). That is, ϕ i > ð1þδ 2 d ; i = 1, …, m, where m represents the number of wells. In contrary, the ‘toe constraint’ formulation protects the wells from saltwater intrusion by avoiding the toe of the interface to reach the wells, i.e., xτi < xi. Mantoglou (2003) showed that ‘potential constraint’ formulations provide simpler solutions and smaller and safer pumping rates since the wells are not salinized if there was a small increase of pumping rates or a small decrease of aquifer recharging rates. RESULTS AND DISCUSSION The criterion to evaluate simulation results after the calibration process is based on performance measures of Equation (12) (ωi). It compares the piezometric head (hs) obtained from solving in MODFLOW the sharp-interface equation (i.e., solving Equation (2) and transforming ϕ to h) with those obtained solving the flow equation (hm): ηh ¼ sffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi X 2 ωi hsi hm i i¼1;…;mh Therefore, the performance measure ηh is defined as the square root of a weighted mean of the square departures of piezometric head hsi from the measured heads hm i , where are the weights assigned to measurements hm i (i = 1, …, mh), which are defined to add up to the unity and with the same value. The K is calibrated for steady state simulations, whereas K and Sy are jointly calibrated for unsteady cases. In addition, those parameters are shown as a homogeneous value for the whole domain or as different values corresponding to strips parallel to the coast (heterogeneous values). Table II presents the performance measure ηh, which reports a good agreement for all for the different cases and assumptions. However, because of the greater smoothness of the hydraulic gradient, steady state cases and scenarios entailing only recharge (without pumping wells) lead to lower ηh values. The performance measurement is even lower, as expected, when different parameters are calibrated for the whole domain (heterogeneous cases). Note that the performance depends on the condition data selection (number of data, location, times when were taken) in transient simulations, so that a better results could be achieved if more conditional data had been used. We have only conditioned to 72 data spatially and temporal distributed to reproduce the scarcity of data in real case studies. Additionally, results also show that before the calibration procedure (i.e., with the initial set of parameters), the agreement can be considered good for most real cases. This is an important conclusion since we could use directly a transient sharp-interface model to deal with seawater intrusion problems without performing a calibration process and implementing a densitydependent model. Figures 3 and 4 reinforce this idea. Figure 3 shows the agreement with regard to h for the initial set of parameters and between the sharp-interface equation, the flow equation (both solved using MODFLOW) and the SEAWAT model. Figure 4 presents the same results for the heterogeneous set of parameters and all cases after the calibration procedure. Again, the Table II. Performance measurements (h) after the parameter calibration process for the different cases and scenarios Initial parameters Calibrated parameters (homogeneous) Cases ɳh 0.05380 0.01694 Cases ɳh 0.05233 0.00999 Calibrated parameters (heterogeneous) Initial parameters Calibrated parameters (homogeneous) 0.00365 0.06611 0.02259 0.00302 0.08697 0.02457 1 2 3 Copyright © 2014 John Wiley & Sons, Ltd. Calibrated parameters (heterogeneous) 0.01250 4 0.02040 Hydrol. Process. 29, 2052–2064 (2015) 2060 C. LLOPIS-ALBERT AND D. PULIDO-VELAZQUEZ Figure 3. Comparison of the piezometric heads at observation well #10, for all cases and using the initial set of groundwater parameters, between the sharp-interface approach, the flow model (both solved using MODFLOW) and the SEAWAT model Figure 4. Comparison of the piezometric heads at observation well #10, for all cases and using the calibrated groundwater parameters, between the sharp-interface approach, the flow model (both solved using MODFLOW) and the SEAWAT model good agreement with regard to piezometric heads between the three approaches in all cases is clear, even for transient simulations. Moreover, the steady cases are improved since results get closer. This good agreement has been observed for all observation wells and cases, as shown for instance in Figure 5. The agreement of the rest of the boreholes and cases is not presented for the sake of conciseness. Taking into account that a good approximation has been obtained with the initial parameters for all Copyright © 2014 John Wiley & Sons, Ltd. the analysed cases, we expect that the initial parameter can be employed in many cases. Nevertheless, we have been working with synthetic aquifers where all parameters and operating conditions are perfectly known. The approximation in some complex real aquifer could be worse, and the calibration process would be helpful to correct the initial mismatch. Case 5 has been designed to show the good behaviour in terms of piezometric head of the sharp-interface model Hydrol. Process. 29, 2052–2064 (2015) USING MODFLOW TO APPROACH TRANSIENT HEAD WITH A SHARP INTERFACE Figure 5. Comparison of the piezometric heads at observation well #19, for transient cases and using the calibrated groundwater parameters, between the sharp-interface approach, the flow model (both solved using MODFLOW) and the SEAWAT model under unsteady simulations and with a spatially variable height of the aquifer from the aquifer base to the sea level (d). This is because the transformation between both approaches (i.e., between the flow potential, ϕ, and the piezometric head, h) makes use of such parameter, as shown in previous sections. Figure 6 depicts the good agreement of both approaches under these conditions for two different observation wells. Furthermore, unsteady cases could be only calibrated regarding the storage coefficient due to the good agreement observed for the initial parameters. In this sense, the performance measure ηh for the calibrated parameters is 0.05864 for case 2, 0.04278 for case 4 and 0.13606 for case 5. However, the extension of the sharp-interface approach to deal with transient seawater problems should not be defined only in terms of piezometric heads but also in terms of seawater penetration, transition zone width and critical pumping rates. Llopis-Albert and PulidoVelazquez (2013) showed that these SEAWAT results for steady simulations strongly depend on groundwater transport parameters and aquifer recharge and pumping scenarios, which may lead the discrepancies between both approaches (i.e., sharp-interface approach and densitydependent transport model) to be not suitable in many cases. Furthermore, the validity of the sharp-interface approach depends on whether the analysis focuses on the Copyright © 2014 John Wiley & Sons, Ltd. 2061 Figure 6. Comparison of the piezometric heads at observation well #10, for case 5 and using the calibrated groundwater parameters, between the sharp-interface approach and the flow model results of the transition zone width or on the toe penetration discrepancies for a given critical pumping rates. This means that for a specific set of hydrogeological parameters, a better approximation regarding the transition zone width but a worse approximation in terms of the relative distance between the toe penetration of both approaches could be achieved. In this sense, results of transient simulations reaffirm the conclusions that a better approximation between both approaches, in terms of the toe penetration, is attained for higher values of longitudinal dispersion and molecular diffusion coefficients. For instance, for case 2, at the simulation time equal to 4470 days, the toe penetration for the sharp-interface approach takes place at a distance of 978.1 m from the coast, whereas for the SEAWAT model 143.3 m when the longitudinal dispersion coefficient is equal to 30 m and the molecular diffusion is not considered. However, when the longitudinal dispersion coefficient is defined as 220 m and the molecular diffusion as 1.62 m2/d, the isoconcentration line corresponding to the 0.1% of the salinity level in seawater is 975.6 m far away from the coast. Then, a value much closer to the sharp-interface approach is obtained. These have been proved to be true for all transient cases and times. These lower discrepancies can be explained by the fact that the sharp-interface approach overestimates the penetration of the salt wedge, and when higher values of those coefficients and longer Hydrol. Process. 29, 2052–2064 (2015) 2062 C. LLOPIS-ALBERT AND D. PULIDO-VELAZQUEZ simulation times are considered, the salt-wedge intrusion becomes larger in the density-dependent transport model. In contrary, with regard to the transition zone width, the validity of the sharp-interface approach for transient simulations is only valid at early times, because with longer times, the transition zone width becomes larger and the salinity contours extend farther inland. The previous results are in line with those obtained for critical pumping rates. We have used the term critical pumping rate because, although we are dealing with transient simulations, the pumping rates are kept constant during the stress periods in which they are activated. In this sense, the wells are first salinized at time equal to 9306 days. We have somehow ‘calibrated’ the parameters (longitudinal dispersion and molecular diffusion coefficients) until a good agreement, in terms of critical pumping rate, between the sharp-interface approach and SEAWAT is attained. For this situation, the critical pumping rate for both approaches is the same and equal to 116.5 m3/d at each pumping well. The ‘calibrated’ groundwater transport parameters are: longitudinal dispersion coefficient equal to 220 m and molecular diffusion coefficient equal to 1.62 m2/d. On the one hand, Figure 7 shows how the 0.1% isoconcentration lines of the density-dependent transport model reaches the pumping wells at t=9306 days, which has been adopted as the salinization threshold to obtain the critical pumping rate. On the other hand, Figure 7 also depicts for sharpinterface approach and the same time, the curve where the X coordinate of the toe penetration match up with the stagnation point, which has been considered the criteria to obtain the critical pumping rate in this approach. Again, we observe how high values of groundwater transport coefficients lead to better agreement regarding the toe penetration and a worse agreement regarding the transition zone width (Figure 7). This is because the sharp-interface approach neglects mixing of fresh water and seawater, whereas for density-dependent model, high values of groundwater transport parameters and longer times lead to Figure 7. Criteria for computing the critical pumping rates for the densitydependent transport model (0.1% isoconcentration lines reaches the pumping wells) and the sharp-interface approach (curve where the X coordinate of the toe penetration match up with the stagnation point) Copyright © 2014 John Wiley & Sons, Ltd. a larger transition zone width at time that the salinity contours extend farther inland. As a final remark, the discrepancies between both approaches may vary, for a particular set of hydrogeological parameters, according to future scenarios of climate change, water demand, water availability, and socioeconomic, environmental and political issues (e.g., Pulido-Velazquez et al., 2011b, 2014). CONCLUSIONS This paper provides insight into the validity of a sharpinterface approach to deal with seawater intrusion in coastal aquifers under transient flow conditions. This is achieved by comparing results between three different approaches under both steady and unsteady flow conditions and for a set of heterogeneous groundwater flow and mass transport parameters, and different scenarios of spatially distributed recharge values and pumping well rates. On the one hand, the comparison is performed between the sharp-interface approach, based on the Ghyben–Herzberg approach, and the groundwater flow model, both solved using MODFLOW. On the other hand, the same results are obtained using the finite difference numerical code SEAWAT, which solves the coupled partial differential equations of flow and density-dependent transport. The comparison is performed in terms of piezometric heads, toe penetration, transition zone width and critical pumping rates. The numerical experiment has been carried out in a 3D unconfined synthetic aquifer, where we show how the sharp-interface approach provides a good agreement in terms of piezometrics heads regarding the density-dependent transport model. This is true for the initial set of groundwater parameters, while after the calibration process of the parameters of the sharp-interface equation, results become even closer to those obtained with SEAWAT. This leads to the conclusion that a transient sharp-interface model could be used to deal with SWI problems without performing a calibration process and implementing a density-dependent model. The simplicity and the low computational cost of this approach would make it suitable to be integrated into groundwater management models at a river basin scale. However, with regard to the toe penetration, transition zone width and critical pumping rates the agreement between both approaches is strongly influenced by the aquifer properties and future management and climate scenarios. We have shown that for this synthetic case study is possible to somehow calibrate the groundwater transport parameters (longitudinal dispersion and molecular diffusion coefficient) to obtain the same toe penetration and critical pumping rates for both approaches, while the transition zone width becomes worse with time. Furthermore, results have shown that discrepancies between both approaches may not be Hydrol. Process. 29, 2052–2064 (2015) USING MODFLOW TO APPROACH TRANSIENT HEAD WITH A SHARP INTERFACE suitable in many cases. Given the difficulty of properly identifying the groundwater parameters and providing general rules applicable to all aquifers and situations, these results can be used as a guideline for modellers, helping them to determine if the sharp-interface approach is appropriate for a particular case study. The decision will be based on the particular hydrogeological parameters of the aquifer as well as on current and future recharge and pumping scenarios. This is because these future scenarios also depend on the global climate change, socioeconomic developments and needs of water in the region, environmental issues and policy decisions. Therefore, all these issues should be taken into account when deciding if the sharp-interface approach is suitable or not. It should be noted that the validity of the sharp-interface approach under transient flow conditions is maybe suitable with the current situation on a particular aquifer but not under future management and climate scenarios. Hence, if the sharpinterface approach makes use of future projections for solving coupled simulation–optimization models for control and remediation of SWI problems, the validity of the sharpinterface approach should require a deeper analysis. Finally, the developed methodology represents an advantage regarding previous models dealing with transient sharpinterface solutions, since groundwater flow models developed in MODFLOW can be directly used to tackle SWI problems by means of its well-known graphical interfaces. In addition, the use of MODFLOW also allows the full integration of the SWI problem into already developed groundwater management models at a river basin scale or models for dealing with optimal contamination remediation, conjunctive use and groundwater management strategies and designs. ACKNOWLEDGEMENTS This research has been partially supported by the GESHYDRO project (CGL2009-13238-C02-01) of the Spanish Ministry of Science and Innovation (Plan Nacional I+D+I 2008–2011) and the GESINHIMPADAPT project (CGL2013-48424-C2-2-R) of the Spanish Ministry of Economy and Competitiveness (Plan Estatal I+C+T+I 2013–2016) and from the subprogramme Juan de la Cierva (2011) of the Spanish Ministry of Economy and Competitiveness. REFERENCES Ahlfeld DP, Barlow PM, Mulligan AE. 2005. GWM – a groundwater management process for the US Geological Survey modular groundwater model (MODFLOW-2000). US Geological Survey Open-File Report 2005–1072, p. 124. Bakker M, Schaars F. 2013. Modeling steady sea water intrusion with single-density groundwater codes. Ground Water 51(1): 135–144. DOI: 10.1111/j.1745-6584.2012.00955.x Copyright © 2014 John Wiley & Sons, Ltd. 2063 Bakker M, Schaars F, Hughes JD, Langevin CD, Dausman AM. 2013. Documentation of the seawater intrusion (SWI2) package for MODFLOW: U.S. Geological Survey Techniques and Methods, Book 6, Chap. A46, 47 p. Bear J. 1979. Hydraulics of groundwater. Mcgraw-Hill: New York. Bear J. 1999. Conceptual and mathematical modeling. In Seawater intrusion in coastal aquifers: concepts, methods, and practices, Bear J, Cheng AH-D, Sorek S, Ouazar D, Herrera I. (eds). Kluwer Acad: Norwell, Mass; 127–161. Capilla JE, Pulido-Velazquez D, Sahuquillo A, Andreu J. 2009. Solving the steady state groundwater flow equation for finite linear aquifer using a generalized Fourier series approach in two dimensional domains. International Journal for Numerical Method in Engineering 79(2): 179–204. DOI: 10.1002/nme.2552 Cartwright N, Li L, Nielsen P. 2004. Response of the salt–freshwater interface in a coastal aquifer to a wave-induced groundwater pulse: field observations and modelling. Advances in Water Resources 27(3): 297–303. DOI: 10.1016/j.advwatres.2003.12.005 Cheng AH-D, Halhal D, Naji A, Ouazar D. 2000. Pumping optimization in saltwater-intruded coastal aquifers, Water Resources Research 36(8): 2155–2165. DOI: 10.1029/2000WR900149 Cheng AH-D, Ouazar D. 1999. Analytical solutions. In Seawater intrusion in coastal aquifers: concepts, methods, and practices, Bear J, Cheng AH-D, Sorek S, Ouazar D, Herrera I. (eds). Kluwer Acad: Norwell, Mass; 163–191. Dagan G, Zeitoun DG. 1998. Seawater–freshwater interface in a stratified aquifer of random permeability distribution. Journal of Contaminant Hydrology 29(3): 185–203. DOI: 10.1016/S0169-7722 (97)00013-2 Dausman AM, Langevin C, Bakker M, Schaars F. 2010. A comparison between SWI and SEAWAT – the importance of dispersion, inversion and vertical anisotropy. In de Melo MTC, Lebbe L, Cruz JV, Coutinho R, Langevin C, Buxo A, editors. Proceedings of SWIM 21 – 21st Salt Water Intrusion Meeting, Azores, Portugal; 2010. p. 271–274. Dhar A, Datta B. 2009. Saltwater intrusion management of coastal aquifers. I: Linked simulation-optimization. Journal of Hydrologic Engineering 14(12): 1263–1272. DOI: 10.1061/(ASCE)HE.1943-5584.0000097 Doherty J. 2004. PEST, model-independent parameter estimation. User’s manual. Watermark Numerical Computing. Eichert BS, Kindler J, Schultz GA, Sokolov AA. 1982. Methods of hydrological computations for water projects. UNESCO: Paris. Essaid HI. 1999. USGS SHARP model. In Seawater intrusion in coastal aquifers – concepts, methods and practices, Bear J, Cheng AH-D, Sorek S, Ouazar D, Herrera I. (eds). Kluwer Acad: Norwell, Mass. Gimenez E, Morell I. 1997. Hydrogeochemical analysis of salinization processes in the coastal aquifer of Oropesa (Castellon, Spain). Environmental Geology 29(1-2): 118–131. DOI: 10.1007/ s002540050110 Gómez Gómez JD, López Geta JA, Garrido Schneider E. 2003. The state of seawater intrusion in Spain. In Tecnología de la Intrusión de Agua de Mar en Acuíferos Costeros: Países Mediterráneos. Vol. II. IGME. Madrid. pp. 169–185. Guo W, Langevin CD, 2002. User’s guide to SEAWAT: a computer program for simulation of three-dimensional variable-density groundwater flow. Report No. US Geol Surv Open File, 01-434. Harbaugh AW, Banta ER, Hill MC, McDonald MG. 2000. MODFLOW2000, The U.S. Geological Survey modular groundwater model – user guide to modularization concepts and the groundwater flow process. US Geol. Surv. Open-File Rep 00–92, 12. Henry HR. 1964. Effects of dispersion on salt encroachment in coastal aquifers, U.S. Geol. Surv. Water Supply Pap., 1613-C. Iribar V, Carrera J, Custodio E, Medina A. 1997. Inverse modelling of seawater intrusion in the Llobregat delta deep aquifer. Journal of Hydrology 198(1–4): 226–244. DOI: 10.1016/S0022-1694(96)03290-8 Langevin CD, Thorne DT Jr., Dausman AM, Sukop MC, Guo W. 2007. SEAWAT version 4: a computer program for simulation of multispecies solute and heat transport: U.S. Geological Survey. Techniques and Methods, Book 6, Chapter A22, 39 p. Llopis-Albert C, Capilla JE. 2009. Gradual conditioning of non-Gaussian transmissivity fields to flow and mass transport data: 3. Application to Hydrol. Process. 29, 2052–2064 (2015) 2064 C. LLOPIS-ALBERT AND D. PULIDO-VELAZQUEZ the Macrodispersion Experiment(MADE-2) site, on Columbus Air Force Base in Mississippi (USA). Journal of Hydrology 371(1-4): 75–84. DOI: 10.1016/j.jhydrol.2009.03.016 Llopis-Albert C, Capilla JE. 2010a. Stochastic inverse modelling of hydraulic conductivity fields taking into account independent stochastic structures: a 3D case study. Journal of Hydrology 391(3-4): 277–288. DOI: 10.1016/j.jhydrol.2010.07.028 Llopis-Albert C, Capilla JE. 2010b. Stochastic simulation of non-Gaussian conductivity fields with multiple statistical populations in a 3D fractured rock medium. Journal of Hydrologic Engineering 15(7): 554–566. DOI: 10.1061/(ASCE)HE.1943-5584.0000214 Llopis-Albert C, Pulido-Velazquez D. 2013. Discussion about the validity of sharp-interface models to deal with seawater intrusion in coastal aquifers. Hydrological Processes 28(19): 3642–3654. DOI: 10.1002/hyp.9908 Llopis-Albert C, Palacios-Marqués D, Merigó JM. 2014. A coupled stochastic inverse-management framework for dealing with nonpoint agriculture pollution under groundwater parameter uncertainty. Journal of Hydrology 511: 10–16. DOI: 10.1016/j.jhydrol.2014.01.021 Mahesha A. 1996. Control of seawater intrusion through injection– extraction well system. Journal of Irrigation and Drainage Engineering 122(5): 314–317. DOI: 10.1061/(ASCE)0733-9437(1996)122:5(314) Mantoglou A, Papantoniou M, Giannoulopoulos P. 2004. Management of coastal aquifers based on nonlinear optimization and evolutionary algorithms. Journal of Hydrology 297(1-4): 209–228. DOI: 10.1016/j. jhydrol.2004.04.011 Mantoglou A, Papantoniou M. 2008. Optimal design of pumping networks in coastal aquifers using sharp interface models. Journal of Hydrology 361(1-2): 52–63. DOI: 10.1016/j.jhydrol.2008.07.022 Mantoglou A. 2003. Pumping management of coastal aquifers using analytical models of seawater intrusion. Water Resources Research 39 (12): 1335–1347. DOI: 10.1029/2002WR001891 Masciopinto C. 2006. Simulation of coastal groundwater remediation: the case of Nardo fractures aquifer in Southern Italy. Environmental Modelling & Software 21(1): 85–97. DOI: 10.1016/j.envsoft.2004.09.028 Mas-Pla J, Rodríguez-Florit A, Zamorano M, Roqué C, Menció A, Brusi D. 2013. Anticipating the effects of groundwater withdrawal on seawater intrusion and soil settlement in urban coastal areas. Hydrological Processes 27(16): 2352–2366. DOI: 10.1002/hyp.9377 McDonald MG, Harbough AW. 1988. A modular three-dimensional finite-difference groundwater flow model, US Geological Survey Technical Manual of Water Resources Investigation, Book 6, US Geological Survey, Reston, VA, 586 p. Molina JL, Pulido-Velazquez M, Llopis-Albert C, Peña-Haro S. 2013a. Stochastic hydro-economic model for groundwater quality management using Bayesian networks. Water Science and Technology 67(3): 579–586. DOI: 10.2166/wst.2012.598 Molina JL, Pulido-Velázquez D, García-Aróstegui JL, Pulido-Velázquez M. 2013b. Dynamic Bayesian networks as a decision support tool for assessing climate change impacts on highly stressed groundwater systems. Journal of Hydrology 479: 113–129. DOI: 10.1016/j. jhydrol.2012.11.038 Naji A, Cheng AD, Quazar D. 1999. BEM solution of stochastic seawater intrusion problems. Engineering analysis with boundary elements; 23(7): 529–537. DOI: 10.1016/S0955-7997(99)00012-0 Park C-H, Aral MM. 2004. Multi-objective optimization of pumping rates and well placement in coastal aquifers. Journal of Hydrology 290(1-2): 80–99. DOI: 10.1016/j.jhydrol.2003.11.025 Paster A, Dagan G, Guttman J. 2006. The salt-water body in the northern part of Yarkon-Taninim aquifer: field data analysis, conceptual model and prediction. Journal of Hydrology 323(1-4): 154–167. DOI: 10.1016/j.jhydrol.2005.08.018 Peña-Haro S, Llopis-Albert C, Pulido-Velazquez M, Pulido-Velazquez D. 2010. Fertilizer standards for controlling groundwater nitrate pollution from agriculture: El Salobral–Los Llanos case study, Spain. Journal of Hydrology 392(3-4): 174–187. DOI: 10.1016/j.jhydrol.2010.08.006 Peña-Haro S, Pulido-Velazquez M, Llopis-Albert C. 2011. Stochastic hydro-economic modeling for optimal management of groundwater nitrate pollution under parameter uncertainty. Environmental Modelling & Software 26(8): 999–1008. DOI: 10.1016/j.envsoft. 2011.02.010 Peralta RC. 2004. User’s manual for web and standard SOMOS versions. Systems Simulation/Optimization Laboratory. Sofware Engineering Copyright © 2014 John Wiley & Sons, Ltd. Division. Department of Biological and Irrigation Enginerring. Utah University, Logan, UT 84322 - 4105. Pool M, Carrera J. 2011. A correction factor to account for mixing in Ghyben–Herzberg and critical pumping rate approximations of seawater intrusion in coastal aquifers. Water Resources Research 47: W05506. DOI: 10.1029/2010WR010256 Pulido-Velazquez D, Sahuquillo A, Andreu J, Pulido-Velazquez M. 2007a. A general methodology to simulate groundwater flow of unconfined aquifers with a reduced computational cost. Journal of Hydrology 338(1-2): 42–56. DOI: 10.1016/j.jhydrol.2007.02.009 Pulido-Velazquez D, Sahuquillo A, Andreu J, Pulido-Velazquez M. 2007b. An efficient conceptual model to simulate surface water body–aquifer interaction in conjunctive use management models. Water Resources Research 43: W07407. DOI: 10.1029/2006WR005064 Pulido-Velazquez D, Sahuquillo A, Andreu J. 2006. A two-step explicit solution of the Boussinesq equation for efficient simulation of unconfined aquifers in conjunctive-use models. Water Resources Research 42 W05423. DOI: 10.1029/2005WR004473 Pulido-Velázquez D, Ahlfeld D, Andreu J, Sahuquillo A. 2008. Reducing the computational cost of unconfined groundwater flow in conjunctiveuse models at basin scale assuming linear behaviour: the case of AdraCampo de Dalías. Journal of Hydrology 353(1-2): 159–174. DOI: 10.1016/j.jhydrol.2008.02.006 Pulido-Velazquez D, Llopis-Albert C, Peña-Haro S, Pulido-Velazquez M. 2011a. Efficient conceptual model for simulating the effect of aquifer heterogeneity on natural groundwater discharge to rivers. Advances in W a t e r Re s o ur c e s 3 4( 1 1 ) : 13 7 7 –1 3 89 . D OI : 1 0. 1 01 6 / j . advwatres.2011.07.010 Pulido-Velazquez D, Garrote L, Andreu J, Martin-Carrasco FJ, Iglesias A. 2011b. A methodology to diagnose the effect of climate change and to identify adaptive strategies to reduce its impacts in conjunctive-use systems at basin scale. Journal of Hydrology 405: 110–122. DOI: 10.1016/j.jhydrol.2011.05.014 Pulido-Velázquez D, García-Aróstegui JL, Molina JL, Pulido-Velázquez M. 2014. Assessment of future groundwater recharge in semi-arid regions under climate change scenarios (Serral-Salinas aquifer, SE Spain). Could increased rainfall variability increase the recharge rate? Hydrological Processes. DOI: 10.1002/hyp.10191 Sakr SA. 1999. Validity of a sharp-interface model in a confined coastal aquifer. Hydrogeology Journal 7(2): 155–160. DOI: 10.1007/ s100400050187 Sherif MM, Singh VP. 1999. Effect of climate change on sea water intrusion in coastal aquifers. Hydrological Processes 13(8): 1277–1287. DOI: 10.1002/(SICI)1099-1085(19990615)13:8<1277::AIDHYP765>3.0.CO;2-W Shi L, Cui L, Park N, Huyakorn PS. 2011. Applicability of a sharpinterface model for estimating steady-state salinity at pumping wells – validation against sand tank experiments. Journal of Contaminant Hydrology 124(1-4): 35–42. DOI: 10.1016/j.jconhyd.2011.01.005 Sreekanth J, Datta B. 2010. Multi-objective management of saltwater intrusion in coastal aquifers using genetic programming and modular neural network based surrogate models. Journal of Hydrology 393(3-4): 245–256. DOI: 10.1016/j.jhydrol.2010.08.023 Strack ODL. 1976. A single potential solution for regional interface problems in coastal aquifers. Water Resources Research 12:1165–117. DOI: 10.1029/WR012i006p01165 Van Camp M, Chikira I, Al Farrah N, Walraevens K. 2013. Modeling approaches and strategies for data-scarce aquifers: example of the Dar es Salaam aquifer in Tanzania. Hydrogeology Journal 21(2): 341–356. DOI: 10.1007/s10040-012-0908-5 Werner AD, Bakker M, Post VEA, Vandenbohede A, Lu C, AtaieAshtiani B, Simmons CT, Barry DA. 2013. Seawater intrusion processes, investigation and management: recent advances and future challenges. Advances in Water Resources 51: 3–26. DOI: 10.1016/j. advwatres.2012.03.004 Zheng C, Wang P. 1999. MT3DMS: a modular three-dimensional multispecies transport model for simulation of advection, dispersion and chemical reactions of contaminants in groundwater systems: documentation and user’s guide. Zheng C, Wang PP. 2003. A modular groundwater optimizer incorporating MODFLOW/MT3DMS. The University of Alabama in cooperation with Groundwater Systems Research Ltd. Hydrol. Process. 29, 2052–2064 (2015)