2890
IEEE TRANSACTIONS ON SMART GRID, VOL. 12, NO. 4, JULY 2021
Voltage-Dependent Load Models in Unbalanced
Optimal Power Flow Using Power Cones
Sander Claeys , Student Member, IEEE, Geert Deconinck , Senior Member, IEEE,
and Frederik Geth, Member, IEEE
Abstract—Mathematical models representing the behavior of
electrical loads are an important part of any optimal power
flow problem. The current state-of-the-art in unbalanced optimal
power flow mostly considers wye-connected, constant power
loads. However, for applications such as conservation voltage
reduction, it is crucial to model how the consumption of the
loads depends on the voltage of the network. This article develops a unified framework to handle a wide variety of load types:
delta- or wye-connected, constant power, constant current and
exponential load models. Furthermore, it proposes a novel convex relaxation for the exponential model, using power cones, that
is intersected next with a well-known semi-definite relaxation of
unbalanced OPF. Finally, numerical results on the LVTestCase
feeder are included for both the exact, non-linear equations and
the convex relaxation, which show how considering the voltage
sensitivity and connection type can lead to different objective values and voltage profiles. Additional results for 128 low-voltage
networks, examine the quality of the solutions obtained with the
proposed relaxation.
Index Terms—Unbalanced optimal power flow, load models,
voltage-dependent, power cones, convex relaxation.
N OMENCLATURE
Sets
B
P
C
U
Ui
Y
Yi
D
Di
G
Buses.
Phases, = {a, b, c}.
Conductors, = {a, b, c, n}.
Units (all loads and generators).
Units connected to bus i ∈ B.
All wye-connected units, ⊂ U.
Wye-connected units at bus i ∈ B, ⊂ U.
All delta-connected units, ⊂ U.
Delta-connected units at bus i ∈ B, ⊂ U.
Generators, ⊂ U.
Manuscript received May 6, 2020; revised August 14, 2020 and November
18, 2020; accepted December 19, 2020. Date of publication January 19, 2021;
date of current version June 21, 2021. This work was supported in part by
CSIRO and the Ph.D. School of InnoEnergy and in part by the Australian
Renewable Energy Agency (ARENA). The work of Sander Claeys was
supported in part by Research Foundation—Flanders (FWO) through a
Doctoral (Ph.D.) Strategic Basic Research under Grant 1S82518N. Paper no.
TSG-00688-2020. (Corresponding author: Sander Claeys.)
Sander Claeys and Geert Deconinck are with the Department of Electrical
Engineering, KU Leuven/EnergyVille, 3001 Leuven, Belgium (e-mail:
sander.claeys@kuleuven.be; geert.deconinck@kuleuven.be).
Frederik Geth is with the Commonwealth Scientific and Industrial
Research Organization, Newcastle, NSW 2304, Australia (e-mail:
frederik.geth@csiro.au).
Color versions of one or more figures in this article are available at
https://doi.org/10.1109/TSG.2021.3052576.
Digital Object Identifier 10.1109/TSG.2021.3052576
H
L
T
Tr
Loads, ⊂ U.
Lines.
Topology, ⊂ L × B × B.
Reverse topology, = {lji|lij ∈ T }.
Variables
Ui
pn
Ui
Udi
Iu
Idu
Ilij
Ilji
Slu
Plu,p
Qlu,p
Su
Slij
Slji
Sm
lij
Sm
lji
Wi [P]
Wdi
Ll [P]
Ldu
Ml
Xu
Vu,p
Voltages at bus i ∈ B.
Phase-to-neutral voltages at bus i ∈ B.
Phase-to-phase voltages at bus i ∈ B.
Currents going to unit u ∈ U.
Phase-to-phase currents for unit u ∈ D.
Sending-end series current for line l ∈ L.
Receiving-end series current for line l ∈ L.
= Plu + jQlu . Per-phase consumption for unit
u ∈ U.
Active consumption for phase p ∈ P, u ∈ U.
Reactive
consumption
for
phase p ∈ P, u ∈ U.
Per-conductor consumption for unit u ∈ U.
Sending-end power for line l ∈ L.
Receiving-end power for line l ∈ L.
Sending-end matrix power var. for line l ∈ L.
Receiving-end matrix power var. for
line l ∈ L.
Lifted phase volt. variable for bus i ∈ B.
Lifted phase-to-phase volt. var. for bus i ∈ B.
Lifted phase series current var. for line l ∈ L.
Lifted ph.-to-ph. current var. for unit u ∈ D.
PSD-constraint block matrix for line l ∈ L.
Auxilary relaxation variable for unit u ∈ D.
Load voltage magnitude, u ∈ H, p ∈ P.
Parameters
Umin
i
Umax
i
Uid,min
Uid,max
Td
Zl
Zkr
l
Ykr
l
au,p
bu,p
αu,p
Bus voltage magnitude lower bound, i ∈ B.
Bus voltage magnitude upper bound, i ∈ B.
Bus ph.-to-ph. volt. magn. lower bound, i ∈ B.
Bus
ph.-to-ph.
volt.
magn.
upper
bound, i ∈ B.
Delta transformation matrix for line l ∈ L.
Four-wire series impedance for line l ∈ L.
Kron-reduced series impedance for line l ∈ L.
Kron-reduced series admittance for line l ∈ L.
Active power prop. constant, u ∈ H, p ∈ P.
Reactive power prop. constant, u ∈ H, p ∈ P.
Active power exponent, u ∈ H, p ∈ P.
This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 License.
For more information, see https://creativecommons.org/licenses/by-nc-nd/4.0/
CLAEYS et al.: VOLTAGE-DEPENDENT LOAD MODELS IN UNBALANCED OPTIMAL POWER FLOW USING POWER CONES
βu,p
P0u,p
Q0u,p
0
Vu,p
min
Vu,p
max
Vu,p
g,min
Pu
g,max
Pu
g,min
Qu
g,max
Qu
Reactive power exponent, u ∈ H, p ∈ P.
Nominal active power, u ∈ H, p ∈ P.
Nominal reactive power, u ∈ H, p ∈ P.
Nominal voltage magnitude, u ∈ H, p ∈ P.
Load volt. magn. lower bound, u ∈ H, p ∈ P.
Load volt. magn. upper bound, u ∈ H, p ∈ P.
Generator active power lower bound, u ∈ G.
Generator active power upper bound, u ∈ G.
Generator reactive power lower bound, u ∈ G.
Generator reactive power upper bound, u ∈ G.
I. I NTRODUCTION
NCREASED penetration of distributed generation may
lead to voltage quality issues in low-voltage distribution
networks. In order to enable further increases, active control methods have been proposed. These methods often build
on optimal power flow (OPF) variants. Some methods exclusively consider reactive power originating from inverters and
capacitor banks [1], [2], referred to as ‘volt-var control’.
Additionally, also active power can be dispatched, typically
through curtailment, which may raise fairness considerations
as to whom is curtailed [3], [4]. Given the crucial role of
OPF in these approaches, recent work has made open-source
implementations available [5], [6].
The consumption of loads depends in varying degrees on the
voltage. Conservation voltage reduction (CVR) refers to lowering the voltage magnitude to reduce consumption [7]. Through
load models, this effect can be included in OPF methods to
better estimate the network capacity. Several load models have
been proposed, amongst which exponential load models are
widely used [8]. In the exponential model, the power consumption is proportional to the applied voltage magnitude raised to
some power, P ∼ V α and Q ∼ V β . Table I shows typical
values for the exponents α and β by device type. The reactive power is typically more sensitive to the voltage magnitude
(β > α). An alternative load model is the ZIP model, which
fits the voltage-dependent power consumption as a linear combination of terms with 0, 1 and 2 as exponent, respectively.
Carneiro et al. compared the ZIP model and exponential model
for fitting field measurements of a distribution substation. Both
worked well for the active power (α = .767), but the ZIP
model lacks higher order terms to represent the reactive power
well in this study (β = 4.784 for the exponential model) [9].
Optimal power flow refers to a class of mathematical
optimization problems which model the steady-state physics of
power grids. The power flow equations are non-linear and lead
to a non-convex feasible space. Convex relaxations encode
such feasible space in a larger space which is convex [11].
This has several advantages. It can certify that a solution is
globally optimal, or at least provide a lower bound on the
global optimum. Furthermore, infeasibility of a relaxation certifies that the original problem is also infeasible [12]. Some
authors propose methods to strengthen the results when the
convex relaxation is not exact. Wei et al. solve a sequence of
convexified penalization problems [13]. Liu et al. propose a
method to recover a feasible solution when the relaxation is
inexact [14]. Convex relaxations also play an important role
I
2891
TABLE I
VAN C UTSEM AND VOURNAS P ROVIDE F ITTED VALUES FOR THE
E XPONENTS IN THE E XPONENTIAL L OAD M ODEL , α (ACTIVE P OWER )
AND β (R EACTIVE P OWER ), BY D EVICE T YPE [10]
in approaches for global optimization of the non-linear OPF
problem [15].
Unbalanced (O)PF generalizes the power flow equations
to include the physics of phase unbalance. This is a more
appropriate modelling framework for low-voltage distribution
networks, which often contain single-phase loads. To the best
of the author’s knowledge, Dall’Anese et al. were the first
to publish a convex relaxation of unbalanced OPF [16]. Gan
and Low advanced the understanding of convex relaxations of
unbalanced OPF for radial networks [17], both with theoretical
results and an empirical study on common test feeders. Note
that these papers contain exclusively Kron-reduced branch
models and constant-power, wye-connected loads, so the test
feeders were simplified appropriately.
Recently, several authors have extended this work further by
incorporating other network elements. Liu et al. include gangoperated on-load tap changers [18] and Bazhrafshan et al.
model voltage regulators (autotransformers) [19]. Zhao et al.
first considered delta-connected constant-power loads [20].
Usman et al. derive extensions for ZIP loads in unbalanced
4-wire OPF and propose a first-order approximation for the
constant-current component [21]. Molzahn et al. take another
approach and propose a convex relaxation of the constantcurrent component. They introduce a variable for the voltage
magnitude, and link it to the lifted voltage variable through a
positive semi-definite constraint. The constant-current component is then set to be proportional to voltage magnitude [22].
This article proposes a convex relaxation using power cones
for exponential loads in general. Power cones have recently
been used to reformulate convex optimization problems to
conic form [23], and are a natural candidate for convex
relaxations of exponential load models.
Popular test feeders for unbalanced power flow (PF), such as
IEEE13, contain a variety of load models [24]. Firstly, loads
can be both wye- and delta-connected. Secondly, loads are
modelled as constant power, constant impedance or constant
current. To use these feeders as benchmarks, unbalanced OPF
should be able to represent all of their features. This article takes an important first step in doing so, by describing
a load model that includes at least all of the load types that
appear in common IEEE unbalanced PF benchmarks. To the
best of the author’s knowledge, this work is the first to use the
mathematical objects called power cones to model the convex
relaxation of general voltage-dependent loads and generators. A case study across 128 low-voltage networks examines
various aspects of the relaxation: computational complexity,
2892
IEEE TRANSACTIONS ON SMART GRID, VOL. 12, NO. 4, JULY 2021
constraint violation and optimality gap with respect to the
exact, non-linear load model.
Implementations of the models presented in this article are
publicly available as part of a community-reviewed opensource project [6]. The non-linear formulation has been
validated numerically against OpenDSS, a popular tool for
unbalanced power flow.
The next section defines preliminaries on the network model
with a strong focus on how loads and generators are connected to general four-conductor buses, in ‘wye’ and ‘delta’.
Section III, the core contribution of this work, develops extensions that model the voltage-dependent behavior. Section IV
summarizes the non-convex network model as a feasible set,
and introduces convex relaxations in the lifted variable space.
This is followed by numerical results for a test case in
Section V.
Fig. 1. A wye-connected unit u ∈ Y connects to all four bus conductors.
The consumed power is defined as the product of the phase current and the
phase-to-neutral voltage.
II. P RELIMINARIES
The network consists of a set of buses, B. Each bus i ∈ B
has four conductors. The first three are the phase conductors
P = {a, b, c}, and the fourth is the neutral conductor n.
Vectors have a bold face, and matrices additionally have a
dark blue color. When a vector V is indexed on C, then V[P]
is the vector of elements indexed on P ⊂ C.
A. Buses and Units
Each bus i ∈ B has an associated bus voltage vector Ui and
pn
phase-to-neutral voltage Ui ,
T
Ui [P]
,
(1)
Ui = Ui,a Ui,b Ui,c Ui,n =
Ui,n
T
pn
Ui = Ui,a − Ui,n Ui,b − Ui,n Ui,c − Ui,n . (2)
A unit u ∈ U draws an amount of current and power in each
conductor,
T
I [P]
,
(3)
Iu = Iu,a Iu,b Iu,c Iu,n = u
Iu,n
Su = Ui (Iu )* ,
(4)
where denotes the element-wise multiplication. A unit is
either connected in wye or in delta. Figures 1 and 2 illustrate
both.
B. Wye-Connected Units
Figure 1 illustrates a wye-connected unit. The power consumption Slu is defined as
⎡
∗⎤
Ui,a − Ui,n Iu,a
pn
∗
Slu = Ui (Iu [P])* = ⎣ Ui,b − Ui,n Iu,b ⎦,
(5)
∗
Ui,c − Ui,n Iu,c
Note that the power drawn in phase a for example, Su,a =
l
= Su,a −
Ui,a (Iu,a )∗ , is generally not the same as Su,a
∗
Ui,n (Iu,a ) ; only when the neutral conductor is perfectly
grounded, then Ui,n = 0, and the two power definitions
become the same
if Ui,n = 0 : Slu = Su [P].
(6)
Fig. 2. A delta-connected unit u ∈ D connects to the three phase bus
terminals. The consumed power is defined as the product of the phase current
and the phase-to-phase voltage.
C. Delta-Connected Units
Figure 2 illustrates a delta-connected unit. The power consumption Slu is now defined in the delta reference frame
instead. The delta voltage Uid is the phase-to-phase voltage,
a linear transformation of the phase voltages.
⎤ ⎡
⎤
⎡
1 −1
0
Ui,ab
1 −1⎦Ui [P] = Td Ui [P]
(7)
Udi = ⎣Ui,bc ⎦ = ⎣ 0
−1
0
1
Ui,ca
The delta current Iud is a vector of currents drawn from
one phase and injected in the next one, as illustrated by
Figure 2. The phase current Iu [P] is a linear transformation
of Idu , derived by applying KCL at every internal node of the
delta configuration. The delta-connected unit does not have a
neutral conductor, ∀u ∈ Di :
⎡d
⎡
⎤
d ⎤
Iu,ab − Iu,ca
1
0 −1
d
d ⎦
− Iu,ab
1
0⎦ Idu (8)
= ⎣−1
Iu [P] = ⎣Iu,bc
d
d
0 −1
1
Iu,ca − Iu,bc
(Td )T
Iu,n = 0
(9)
For delta-connected units, Sul is defined differently, ∀u ∈ Di :
*
(10)
Slu = Udi Idu .
CLAEYS et al.: VOLTAGE-DEPENDENT LOAD MODELS IN UNBALANCED OPTIMAL POWER FLOW USING POWER CONES
2893
D. Loads and Generators
G. Lifted Network Model
Generators u ∈ G are modelled as wye-connected units,
G ⊂ Y. The generated apparent power, −Sul , is bounded by
box constraints,
There are two broad categories of network models: bus
injection models (BIM) and branch flow models (BFM).
Unlike BIM, BFM introduces a current variable for each
branch, which appears in the branch power constraints.
Dall’anese et al. proposed a semi-definite programming (SDP)
relaxation for the multiphase BIM model [16]. Gan and Low
also proposed a SDP relaxation of the BFM model, specifically for radial networks. They showed that the BIM and
BFM relaxations are equivalent for radial networks, and BFM
is numerically more stable because it avoids ill-conditioned
constraints [17].
Since the low-voltage networks examined in the case study
are radial, the BFM-SDP proposed by Gan and Low is used.
First, define the following lifted variables
Pg,min
≤ −Plu ≤ Pg,max
, Qg,min
≤ −Qlu ≤ Qg,max
.
u
u
u
u
(11)
All other units are loads, H = U \ G. For loads, Sul is determined by the voltage magnitude it sees, following the voltage
dependency described in Section III.
E. Lines
The buses are connected by a set of lines. A line l ∈ L
connects bus i to bus j, lij ∈ T . When line-charging is ignored,
each line is characterized by its impedance matrix Zl . Ohm’s
law relates the sending-end and receiving-end currents to the
voltage,
Uj = Ui − Zl Ilij
Ilij + Ilji = 0.
The power flow on both ends of the line is defined as
*
*
Slij = Ui Ilij
Slji = Uj Ilji .
(12)
(13)
When the neutral is perfectly grounded at both ends of the
line, then Ui,n = Uj,n = 0 and we can apply Kron-reduction
to Zl , leading to
if Ui,n = Uj,n = 0 : Uj [P] = Ui [P] + Zkr
l Ilij [P].
(14)
Zkr
l is a transformation of Zl , directly linking the voltage drop
in the phase conductors to only the current in the phase conductors [25]. Rewriting (14) and substituting it in the definition
of Slij [P] and Slji [P], leads to a non-linear constraint linking
these variables directly to Ui and Uj ,
*
Slij [P] = Ui [P] Ykr
,
(15a)
l Ui [P] − Uj [P]
*
,
(15b)
Slji [P] = Uj [P] Ykr
l Uj [P] − Ui [P]
kr −1
where Ykr
l = (Zl ) .
F. Kirchoff’s Current Law
Kirchoff’s current law (KCL) for the phase conductors, is
(16)
Iu [P] +
Ilij [P] = 0,
u∈Ui
lij∈T ∪T r
where the summation over T ∪ T r captures both the sendingend and receiving-end branch currents. Note that some authors
write (16) with separate terms for the sending-end and
receiving-end currents, i.e., one term for elements over T and
another for T r . Since the line model is not the main focus,
this work uses the more compact notation in (16).
KCL can be defined in terms of power variables, by multiplying the conjugate of (16) element-wise with the bus voltage
vector Ui ,
(17)
Su [P] +
Slij [P] = 0.
u∈Ui
lij∈T ∪T r
H m
H
Sm
lij ← Ui [P](Ilij [P]) Slji ← Ui [P](Ilji [P]) ,
(18a)
Wi [P] ← Ui [P](Ui [P])H Wj [P] ← Uj [P](Uj [P])H ,
(18b)
H
Ll [P] ← Ilij [P] Ilij [P] ,
(18c)
where (.)H denotes the conjugate transpose. The arrow ←
indicates this is the definition of a lifted variable, not a constraint which is included in any optimization problem. Note
that Sm
lij is a matrix variable, of which only the diagonal elements correspond to the usual definition of line flow power,
H
diag(Sm
lij ) = Slij . By right-multiplying (14) with (Il ) and by
itself, respectively, and substituting the lifted variables (18),
we obtain the BFM constraints
m
kr
Sm
lij [P] + Slji [P] = Zl Ll [P],
(19a)
H
kr
Wj [P] = Wi [P] + Zkr
l Ll [P] Zl
H
H
kr
kr
m
[P]
[P]
S
Z
− Sm
−
Z
(19b)
lij
l
l
lij
Sm
Wi [P]
lij [P]
H
Ml = m
, Ml 0, (19c)
Ll [P]
Slij [P]
where x
0 denotes that x is positive semidefinite (PSD).
The relaxation is exact when rank(Ml ) = 1, ∀l ∈ L. For this
condition to be sufficient, the topology has to be radial, and
the lines have to be directed away from the reference bus (this
can be achieved easily by changing the orientation if needed).
For more details, refer to [17]. Gan and Low only considered
wye-connected loads with grounded neutrals [17]. When the
neutral is grounded, the power consumed by the load between
each phase and the neutral, is equal to the power drawn in
each phase alone (6). In this case, the load consumption Sul
appears directly in the power balance constraint (17).
The same does not hold for delta-connected loads, which
cannot be represented as a set of convex constraints in the
lifted variable space. Instead, Zhao et al. proposed a convex relaxation for delta-connected loads [20]. Define Xu , the
outer product of the phase voltage Ui [P] and the delta current
Idu , ∀u ∈ Di :
H
Xu ← Ui [P] Idu ,
(20)
2894
IEEE TRANSACTIONS ON SMART GRID, VOL. 12, NO. 4, JULY 2021
and introduce a PSD constraint
Wi [P] Xu
(Xu )H Ldu
∀u ∈ Di :
0.
(21)
Using the identities
H
Ui [P](Iu [P]) = Ui [P] Idu Td = Xu Td ,
H
H
Udi Idu = Td Ui [P] Idu = Td Xu ,
H
(22)
(23)
The main contribution of this work is allowing the load
consumption Slu to depend on the magnitude of the applied
voltage. Section III discusses in detail how this is modelled.
For now, note that the square of the phase voltage magnitude
appears in the lifted network model as the diagonal elements
of Wi [P],
⎡
⎤⎡
⎤H
Ui,a
Ui,a
Wi [P] ← ⎣Ui,b ⎦⎣Ui,b ⎦
Ui,c
Ui,c
⎡ ∗⎤
Ui,a 2
. . . Ui,a Ui,c
⎥
⎢
..
..
..
(25)
=⎣
⎦.
.
.
.
∗
Ui,c Ui,a
...
|Ui,c |2
pn
When the neutral is grounded, Ui = Ui [P], so when
modelling wye-connected loads, the square of the applied voltage magnitudes is directly available as the diagonal elements
of Wi [P]. For delta-connected loads, the applied voltages are
the phase-to-phase voltage magnitudes instead. Define Wid ,
T
Wdi = Td Wi [P] Td .
(26)
If the relaxation is exact, the diagonal elements of Wid will
contain the square of the phase-to-phase voltage magnitudes,
similar to how the diagonal elements of Wi [P] contain the
square of the phase voltage magnitudes. The relaxation of the
exponential model in the next section, uses either the diagonal
elements of Wi [P] or Wdi , depending on whether the load is
wye or delta-connected.
III. VOLTAGE -D EPENDENT L OAD M ODEL
A multi-phase load u consists of a number of individual
l
in
loads, each consuming an amount of apparent power Su,p
l
steady-state, p ∈ {a, b, c}. Su,p has a real and imaginary part,
the active power Plu,p and the reactive power Qlu,p .
(27)
The individual loads of a multi-phase load can be connected in
two different ways: in ‘wye’ or in ‘delta’. For wye-connected
units, Vu,p refers to the magnitude of the phase-to-neutral
voltage, whilst for delta-connected units, it refers to the
phase-to-phase voltage,
pn (28a)
∀u ∈ Yi : Vu,p = Ui,p ,
(28b)
where |x| denotes the magnitude of the complex variable x.
Plu,p and Qlu,p depend on a voltage magnitude Vu,p ,
Plu,p = au,p (Vu,p )αu,p , Qlu,p = bu,p (Vu,p )βu,p ,
Su [P] and Slu can be written as linear transformations of Xu ,
∀u ∈ D:
(24)
Su [P] = diag Xu Td Slu = diag Td Xu .
l
= Plu,p + jQlu,p
Su,p
d Vu,p = Ui,p
,
(29)
where au,p and bu,p are the proportionality constants, and αu,p
and βu,p are the exponents. The proportionality constants are
0 ) and
usually not specified directly, but by pairs (P0u,p , Vu,p
0
0
0
(Qu,p , Vu,p ). For example, when Vu,p is equal to Vu,p , then
the consumed active power will be P0u,p . The proportionality
constants are related to these by
P0u,p
αu,p ,
au,p = 0
Vu,p
Q0u,p
bu,p = βu,p .
0
Vu,p
(30)
We allow negative values for au,p (or P0u,p ), since loads at
the low-voltage level often represent the aggregate of several
devices, including photovoltaic generators, which can make
the net consumption negative when there is a lot of irradiance.
The same goes for bu,p (or Q0u,p ), to support both inductive and
capacitative loads.
The exponents on the other hand are always non-negative.
By fixing the exponents to specific values, the equations
become equivalent to those describing common load models,
i.e.,:
• αu,p = βu,p = 0, constant power
• αu,p = βu,p = 1, constant current
• αu,p = βu,p = 2, constant impedance
Since a ZIP-model is nothing more than a linear combination
of these three, a set of three loads can equivalently represent
a ZIP-model.
A. Bounds
The voltage magnitude Vu,p is bounded below and above
min and V max ,
by Vu,p
u,p
min
max
≤ Vu,p ≤ Vu,p
.
0 ≤ Vu,p
(31)
The voltage-dependency (29) implies bounds on Plu,p and Qlu,p
once the voltage magnitude is bounded,
α
α
l,min
min u,p
l,max
max u,p
= au,p Vu,p
, Pu,p
= au,p Vu,p
. (32)
Pu,p
The same applies to bu,p and Qlu,p .
B. Lifting
The lifted variable space contains variables W which represent the product of ordinary
voltage
variables U. Introduce the
2
lifted variable Wu,p ← Vu,p , of which the definition differs
for wye and delta-connected units,
∀u ∈ Yi : Wu,p = Wi,pp ,
(33a)
∀u ∈ Di :
(33b)
d
Wu,p = Wi,pp
,
d
where, e.g., Wi,pp
denotes the element (p, p) of the matrix
d
Wi defined in II-G. We will now reformulate the equations
CLAEYS et al.: VOLTAGE-DEPENDENT LOAD MODELS IN UNBALANCED OPTIMAL POWER FLOW USING POWER CONES
2/αu,p
≥ Wu,p
⇔ Plu,p /au,p
2895
(37)
Therefore, we can write this as the cone inclusion constraint
Plu,p /au,p , 1, Wu,p ∈ P3 2/αu,p .
(38)
Similarly, when 0 < αu,p < 2 applies, (34) is a concave
function and defines an upper bound on Plu,p instead.
α /2
Plu,p ≤ au,p Wu,p u,p
(39)
αu,p /2
⇔ Wu,p
≥ Plu,p /au,p
(40)
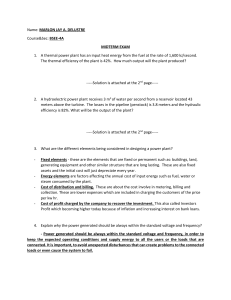
Fig. 3. The black line indicates the true voltage-dependency of Plu,p . The
convex relaxation consists of expanding the black line to the gray area, which
is bounded above or below by the affine function l(Wu,p ). au,p and αu,p determine whether the convex relaxation is bounded above or below by the black
line. The brown arrows indicate qualitatively the gradient of the unbalanced
OPF problem defined in the case study; see Section V for further discussion.
Qlu,p behaves identical (but substitute au,p → bu,p and αu,p → βu,p ).
This leads to a slightly different cone inclusion constraint,
Wu,p , 1, Plu,p /au,p ∈ P3 αu,p /2 .
(41)
min , Pl,min /a )
Finally, the line connecting the points (Wu,p
u,p
u,p
max
l,max
and (Wu,p , Pu,p /au,p ) is an affine underestimator if
0 < αu,p < 2, and an overestimator if 2 < αu,p ,
l(Wu,p ) =
in terms of Wu,p instead of Vu,p , for use in the lifted variable
1
space. Substituting Vu,p = Wu,p 2 into (29) leads to
Plu,p = au,p Wu,p
αu,p
2
, Qlu,p = bu,p Wu,p
βu,p
2
.
(34)
For the cases where the exponents αu,p , βu,p are 0 (constant
power) or 2 (constant impedance), (34) simplifies to a linear
function. For the other cases, this is either a stricly convex or
concave function. Figure 3 shows graphically how αu,p and the
sign of au,p determine whether the function is strictly convex
or concave.
C. Relaxation
If αu,p is not exactly 0 or 2, then (34) describes either a
strictly convex or strictly concave function. Figure 3 illustrates
these functions graphically as black curves. Think of these
black curves as sets of feasible points (Wu,p , Plu,p ); such sets
are not convex. However, the sets indicated as gray areas, are
convex and include all elements of the black curves. Therefore,
replacing the black curves by the gray areas, constitutes a convex relaxation. In fact, the gray areas are the ‘smallest’convex
sets which contain all feasible points, i.e., they are convex
hulls, for known voltage magnitude bounds.
The rest of this section will describe these convex hulls
mathematically, using power cones and halfplanes. Only Plu,p
is discussed. Qlu,p is analogous, with the mapping Plu,p →
Qlu,p , αu,p → βu,p and au,p → bu,p .
Let P3 (e) denote the three-dimensional power cone with
exponent 0 < e < 1, formally defined
(35)
P3 (e) = x ∈ R3 | x1e x21−e ≥ |x3 |, x1 , x2 ≥ 0 .
Whilst Plu,p can be both negative and positive, Plu,p /au,p is
always positive. What follows is valid for all values of au,p ,
both positive and negative.
For αu,p > 2, (34) is a convex function, and defines a lower
bound on Plu,p .
α /2
Plu,p ≥ au,p Wu,p u,p
(36)
l,max − Pl,min Pl,min
1 Pu,p
u,p
u,p
min
W
+
−
W
.(42)
u,p
u,p
max
min
au,p Wu,p − Wu,p
au,p
For the constant-current case (αu,p = 1), the power cone
simplifies to a rotated second-order cone of dimension 3,
RSoC(3). The constant power and impedance models are modelled by affine sets instead. In summary, the voltage-dependent
unit model is
αu,p = 0 Plu,p = P0u,p ,
l
Pu,p /au,p ≥ l(Wu,p ), αu,p = 1 Wu,p /2, 1, Plu,p /au,p ∈ RSoC(3),
(43a)
(43b)
αu,p = 2 Plu,p = au,p Wu,p ,
(43c)
l
Pu,p /au,p ≥ l(Wu,p ),
0 < αu,p < 2 Wu,p , 1, Plu,p /au,p ∈ P3 αu,p /2 ,
2 < αu,p
(43d)
l
P
u,p /αu,p ≤ l(Wu,p ),
Plu,p /au,p , 1, Wu,p ∈ P3 2/αu,p .
(43e)
Finally, the maximum gap Pmax
u,p between the power cone and
, can
the affine constraint l, which occurs at lifted voltage Wu,p
be calculated analytically
max )αu,p − (V min )αu,p 2/(αu,p −2)
(V
2
u,p
u,p
=
, (44a)
Wu,p
max )2 − (V min )2
αu,p (Vu,p
u,p
αu,p
2 − l(W ).
(44b)
Pmax
u,p = au,p (Wu,p )
u,p
Note that substituting αu,p ← 1, leads to the same formula
derived by Molzahn et al. for the constant-current case [22]
(using the identity a2 − b2 = (a − b)(a + b) and cancelling the
max − V min ) in nominator and denominator).
term (Vu,p
u,p
The maximum gap relative to the nominal consumption,
Pmax
u,p /|au,p |, depends only on the exponent value and the
voltage bounds. Table II shows numerical values for several
exponent values and voltage bounds. The largest gap is 4.1%
of the consumption at nominal voltage.
The model for reactive power is obtained by simply replacing Plu,p by Qlu,p , au,p by bu,p and αu,p by βu,p .
2896
IEEE TRANSACTIONS ON SMART GRID, VOL. 12, NO. 4, JULY 2021
TABLE II
T HIS TABLE S HOWS THE M AXIMUM D EVIATION I NTRODUCED BY THE
R ELAXATION FOR THE ACTIVE AND R EACTIVE P OWER C ONSUMPTION ,
FOR VARIOUS VALUES OF THE E XPONENT AND VOLTAGE B OUNDS
A. Voltage Bounds
The magnitude of the phase-to-phase and phase-to-neutral
voltages is bounded, to ensure proper functioning of the connected devices. When the neutral is grounded, Ui,n = 0, then
the phase-to-neutral bounds become
if Ui,n = 0 :
D. Constant-Current Loads
Constant-current loads are defined to have a power consumption proportional to the applied voltage magnitude,
P, Q ∼ V. This is a special case of the exponential model,
where αu,p = βu,p = 1.
Molzahn et al. propose a relaxation for constant-current
loads [22]. They introduce a variable Vu,p representing the
voltage magnitude. Linking
it to the lifted network model,
would require Vu,p = Wu,p . This defines a non-convex space
in (Wu,p ,Vu,p ), so instead Molzahn et al. relax this constraint
2 , which they cast as a 2x2 PSD constraint,
to Wu,p ≥ Vu,p
min ,
and add an affine constraint going through the points (Wu,p
min ) and (W max , V max ). Then finally, Molzahn et al. define
Vu,p
u,p
u,p
l
Pu,p = c Vu,p , for some proportionality constant c, where we
ignore the Z and P component.
We will now argue that this is in fact equivalent to (43b),
under mild conditions. Substituting Vu,p ← 1c Plu,p in Wu,p ≥
2 leads to c2 W
l
2
Vu,p
u,p ≥ (Pu,p ) . This is identical to the square
of (39) with αu,p = 1 and c = au,p (squaring does not create additional solutions since Wu,p ≥ 0 and Plu,p /au,p ≥ 0).
Similary, the affine constraint introduced by Molzahn et al. is
equivalent to l(Wu,p ) after substituting out Vu,p .
In fact, Molzahn et al. introduce a voltage magnitude variable V per bus, and not per load. Therefore, if multiple loads
are present at a bus, the same voltage magnitude approximation error is shared by all loads, whilst in our formulation,
this can be chosen independently for each load. For multiple
constant-current loads at a single bus, the equivalence does not
hold anymore. In practice however, this rarely occurs, as loads
are often aggregated per bus anyways. In summary, our model
is complementary to that of Molzahn et al., as it is practically
equivalent for αu,p = βu,p = 1, whilst extending it to values
for αu,p , βu,p other than 0, 1 and 2.
IV. F ORMULATIONS
An optimization problem has variables, constraints and an
objective function. The variables and constraints define a feasible set: the set of all values of those variables for which all
constraints are satisfied.
In this section, we will summarize explicitly all variables and constraints that together define the feasible set of
the optimization problem. Later, in the case study, we add
an objective function to obtain a well-defined optimization
problem. First, we introduce the main network constraints of
interest: bounds on the phase-to-phase and phase-to-neutral
voltage magnitude. Thereafter, we summarize the exact,
non-convex formulation, followed by a convex relaxation of
the entire model.
Umin
≤ |Ui [P]| ≤ Umax
.
i
i
(45)
The phase-to-phase voltages are linear transformations of the
phase voltages, and are bounded by
(46)
Uid,min ≤ Td Ui [P] ≤ Uid,max .
B. Non-Convex Formulation SU
This exact, non-convex formulation of the problem has only
power (S) and voltage variables (U). When a wye-connected
unit is connected to a bus with a perfectly grounded neutral,
then Ui,n = 0, and the current variables disappear from (5),
if Ui,n = 0 :
Slu = Su [P].
(47)
For delta-connected units however, expressing Su [P] as a
function of Ui [P] and Slu is more involved, ∀u ∈ Di :
⎤
⎡
l
l
Su,a
Su,c
U
−
⎢ i,a Ui,a −Ui,b
Ui,c −Ui,a ⎥
⎢
l
⎥
l
⎢
⎥
Su,b
Su,a
⎥
(48)
U
Su [P] = ⎢
−
⎢ i,b Ui,b −Ui,c
Ui,a −Ui,b ⎥.
⎢
⎥
l
l
⎣
⎦
Su,b
Su,c
Ui,c Ui,c −U
− Ui,b −U
i,a
i,c
Combining this with the non-convex branch model and
nodal power balance equations, we obtain the exact, nonconvex formulation of the problem.
feasible set SU
variables
Su [P], Slu ∀u ∈ U
Ui [P] ∀i ∈ B
Slij [P], Slji [P] ∀lij ∈ T
subject to
(29) ∀u ∈ H, (11)
(6) ∀u ∈ Yi , (48)
(17), (28)
(45), (46)
∀u ∈ G
∀u ∈ Di
∀i ∈ B, (15)
∀lij ∈ T .
C. Convex Relaxation SWL
This formulation combines the BFM-SDP model by Gan
and Low [17], the convex relaxation of delta-connected loads
by Zhao et al. [20], and the proposed convex relaxation of
exponential loads Section III-C. The BFM-SDP model contains power flow variables (S), lifted voltage variables (W)
and lifted current variables for the lines (L); therefore, this
formulation is referred to as SWL. Most of the constraints
are defined in the previous sections; only the voltage bounds
remain.
CLAEYS et al.: VOLTAGE-DEPENDENT LOAD MODELS IN UNBALANCED OPTIMAL POWER FLOW USING POWER CONES
Fig. 4. The LVTestCase feeder supplies power to 55 households, which are
modelled as single-phase loads. Two generators are added to the feeder, V
and G.
The diagonal elements of Wid contain the square of the
phase-to-phase voltage magnitude, Uid , (46) becomes
T ≤Uid,max Uid,max .
Uid,min Uid,min ≤diag Td Wi [P] Td
(49)
Similarly, the phase-to-neutral bounds (45) become
Umin
Umin
≤ diag(Wi [P]) ≤ Umax
Umax
.
i
i
i
i
(50)
In summary,
feasible set SWL
variables
Su [P], Slu
∀u ∈ U
Wi [P] ∀i ∈ B
m
Sm
lij [P], Slji [P], Ll [P] ∀lij ∈ L
Xu , Ldu ∀u ∈ D
subject to
(43) ∀u ∈ H, (11) ∀u ∈ G
(6) ∀u ∈ Yi , (24), (21) ∀u ∈ Di
(17), (33)
(49), (50)
∀i ∈ B, (19)
∀lij ∈ T .
V. C ASE S TUDY
A. Exponent Sensitivity Study
The case study in this section minimizes the generation
cost to supply a set of loads in the IEEE benchmark feeder
LVTestCase (at time step 1000). Two things are studied: the
error made by not considering the voltage-dependency of
the loads, and the gap introduced by the proposed relaxation. The SU formulation we developed, can also be used
to solve unbalanced PF cases. By doing so, we validated it
against OpenDSS for constant power loads, and matched it
very closely (the error on the bus voltage magnitude was
less than 1E-7 in p.u.) [6]. The results presented here, were
obtained with Ipopt as a solver for the SU formulation, and
with Mosek v9.1 for the SWL formulation. To the best of the
author’s knowledge, Mosek (and only from v9 onwards) is
2897
Fig. 5. α and β are set to the same value, and are varied from 0 to 3. The
optimality gap is nearly zero when α, β ≥ 2. The objective is normalized
with respect to the constant power objective value (α = β = 0), f = $142.
the only solver which accepts semi-definite and power cone
constraints simultaneously.
In order to match the scope of the model presented in this
article, we slightly modify LVTestCase; we remove the substation transformer and update the nominal voltage level to
230V LN, which is more common in continental Europe. For
the details, please refer to the full OpenDSS specification [26].
The original network is very lightly loaded, so we multiply
each load by a factor of 3, increasing the total loading per
phase to [53.2, 48.4, 42.5] kW and [17.5, 15.9, 14.0] kvar.
LVTestCase is an IEEE benchmark feeder for unbalanced
PF. Therefore, we have to augment it with OPF specific data.
Firstly, we impose bounds
on the phase-to-neutral voltage
pn magnitude, 207V ≤ Ui √ ≤ 253V,
d and on the
√ phase-to-phase
voltage magnitude, 207 3V ≤ Ui ≤ 253 3V (0.9 and 1.1
in per-unit).
Next, Figure 4 shows where two generators are added to the
network. A first generator G generates at a cost cG = 1.0$/kW
in the middle of the network. It can inject in each phase at
most a third of two times the total loading. A second generator,
V, is added at the start of the network, with a cost which is
20% larger, cV = 1.2$/kW. It represents the exchange with the
medium-voltage network; the voltage at the bus it is connected
to, is fixed to a balanced phasor of 1 p.u., and the exchange
is unbounded, acting as a slack bus generator in this system.
The objective is minimizing the total generation cost to supply
the loads,
(51)
cu 1T Pgu .
f =
u∈G
Note that it is not required that the exponents for active power
(α) and for reactive power (β) are the same; this is only done
to simplify the figures.
First, all loads are wye-connected as specified in the original LVTestCase. Figure 5 shows the objective for the SU and
SWL formulation, for different values of the voltage sensitivity exponent α and β. If the voltage sensitivity is present but
not included in the model, then the setpoint obtained for generator G will be suboptimal; this is illustrated by the ‘constant
power decision’ case.
Figure 6 illustrates what is happening when the voltage sensitivity increases. These results are local optima obtained for
2898
IEEE TRANSACTIONS ON SMART GRID, VOL. 12, NO. 4, JULY 2021
Fig. 8. The behavior is similar to wye-connected loads, besides that ignoring
the voltage sensitivity leads to a bigger increase in the generation cost, (α =
β = 0). The objective is normalized with respect to f = $142.
Fig. 6. This figure illustrates the distribution of the phase-to-neutral voltage
magnitude, across all buses and phases. As the load becomes more sensitive
to the voltage, the optimal dispatch will lower the resulting voltage profile, to
prevent increasing the load too much. These results are local optima obtained
for the SU formulation.
Fig. 7. When α ≥ 2, the relaxation only introduces additional, non-physical
solutions which consume more active power. This will increase the objective
of an OPF problem that minimizes the generation cost, and therefore the gap
p vanishes for α ≥ 2.
the SU formulation. When the loads are constant power, then
the cheaper generator G will supply as much load as it can,
constrained by the bounds on the voltage magnitude. However,
once the active power exponent α is greater than zero, this
comes at a tradeoff: utilizing generator G to the fullest, leads
to high voltage magnitudes and increased load consumption.
Therefore, as α is increased, eventually the optimal dispatch
redispatches the generators to yield a voltage profile with lower
voltage magnitudes.
In order to examine the gap due to the relaxation of the
voltage-dependency, define
αu,p p
l
2
,
(52)
=
Pu,p − au,p Wu,p
u∈H p∈P
a measure for the distance of the solution to the ‘black line’
in Figure 3, which we will refer to as the ‘active power gap’
(and similarly q for the reactive power gap). When the relaxation is tight, this is zero. Figure 7 shows how the gap evolves
for different values of α/β. As indicated by Figure 3, when
0 ≤ α ≤ 2, the relaxation allows additional solutions which
Fig. 9. The optimal voltage profile for delta-connected loads, looks quite
different. The optimal dispatch results in a voltage profile closer to 1 p.u. than
for wye-connections.
consume less power. When the objective is to minimize generation cost, this is exploited to reduce the effective load. When
α ≥ 2, the relaxation only introduces additional solutions
where the load consumes higher amounts of active power; this
explains why p vanishes. Note that this is an empirical observation, and most likely cases exist where this does not hold.
For example, a case which is infeasible before the relaxation
due to overvoltages, could be made feasible by increasing the
active power consumed by the loads.
When the loads are connected in delta instead, the results
change. Figure 8 shows the same comparison of the obtained
objective values, which follow a similar trajectory as the wyeconnected loads. Figure 9 shows the corresponding voltage
profile. Unlike the wye-connected loads, the optimal dispatch
lowers the voltage profile more for the same voltage sensitivity
exponent α/β.
B. Large Scale Study
The previous case study focused on gaining a qualitative
understanding of the proposed optimization problem, and how
the solution changes with the exponent values α, β. Next, the
CLAEYS et al.: VOLTAGE-DEPENDENT LOAD MODELS IN UNBALANCED OPTIMAL POWER FLOW USING POWER CONES
same optimization model is applied to a large set of different
networks. Fig. 5 shows that the optimality gap was relatively
large for, e.g., α, β = 1.0, whilst for α, β ≥ 2.0 it was
small. Therefore, two scenarios are considered: α, β = 1.0
and α, β = 3.0.
Rigoni et al. published a data set of 128 synthetic, lowvoltage networks. These are based on real feeders in the UK,
and are supplied with several time series for, e.g., loads and
photovoltaic generators in both summer and winter [27]. This
case study applies the summer load profiles with a power factor of 0.95, at time step 144 (11:55-12:00). Furthermore, the
networks were slightly modified in two ways. The original
networks contain a single 11/0.416 kV transformer between
the reference bus and the rest of the feeder; this transformer
was removed, and the reference bus voltage was set to 0.230
kV LN instead. Secondly, the original networks have a very
high ratio of lines to loads; this is sometimes caused by tracing the networks from GIS data. Note that these lines have
zero admittance to ground. When they are connected in series
without any other components between them, they are merged
into a single line for this case study.
The same phase-to-neutral
voltage bounds are applied as
pn before, 207V ≤ Ui ≤ 253V. The generator V is added
at the reference bus at the head of the feeder. The location
of generator G is systematically determined by the following
procedure. First, solve the power flow for the network when
only generator V is active. Next, calculate the maximum phaseto-neutral voltage magnitude at each load bus and sort them.
Finally, place generator G at the load bus in the middle of
this list (or just before for an even number of load buses).
This systematically yields a placement similar to the previous
case study. For the exact placement of the generators, refer
to [28]. The generator cost remains the same. The generator
bounds are unconstrained, in order to ensure a fair comparison.
If these bounds are active at the solution, then this would
hide differences in the dispatch between the SWL and SU
formulation.
This yields a library of 128 instances of the optimization
problem, where the number of loads varies from 2 up to 302.
The number of buses is proportional to the number of loads,
with on average 2.04 buses for each load. Figure 10 shows that
the solve time increases linearly in the number of buses; the
SWL formulation takes on average 3.3 times longer to solve
than the exact SU formulation. These results were obtained
with constant power loads. Adding power cones to model
exponential loads (α = β = 3.0) in the SWL formulation,
did not impact the solve time in a clear way. On average, it
took 4% longer, but varied from 57% faster up to 177% slower.
Note that 5/128 instances did not converge due to numerical
issues for αu,p = βu,p = 3.0, and are left out of the results.
As discussed in Section II-G, for the BFM-SDP relaxation
to be exact, Ml should be of rank 1 for all lines l ∈ L. A PSD
matrix of rank 1, has a single non-zero, positive eigenvalue.
Due to numerical errors, even when the relaxation is exact, Ml
will have small non-zero eigenvalues. Practically, we evaluate
whether the matrix has rank 1 by requiring that λ1 /λ2 , the ratio
of the highest to the second highest eigenvalue, is sufficiently
high. Figure 11 shows that the lowest eigenvalue ratio for all
2899
Fig. 10. The solve time increases approximately linearly in the number of
buses. Solving the SWL formulation takes on average 2.6 times longer than
SU. These instances were solved with constant power loads, α = β = 2.0;
adding the power cones to model α = β = 3.0, only increased the SWL solve
time by 4% on average.
Fig. 11. For the BFM-SDP relaxation to be exact, the ratio λ1 /λ2 should be
sufficiently high for all lines. This figure shows the distribution of the lowest
ratio across all lines, for all 128 instances.
lines and all networks, is at least 1E5. Past experience with
Mosek showed that ratios above 1E4 were sufficient to yield
practically identical results as the SU formulation.
However, the relaxation as a whole is not exact, because the
power cone relaxation is not tight. Figure 12 shows the active
power gap. In order to compare it across network instances of
different size and total loading, the gap has been normalized
with respect to the total apparent power at nominal voltage,
⎞2 ⎛
⎞2
!⎛
! !
P0u,p ⎠ + ⎝
Q0u,p ⎠ .
St = "⎝
u,p
(53)
u,p
As observed in the first case study, the active power gap goes
to zero when αu,p = 3.0. Even then, the relaxation is not tight,
because the reactive power gap remains non-zero as shown in
Figure 13. In the remainder of this section, we will examine
the ‘quality’ of the inexact solution obtained by solving the
SWL formulation.
Solving the optimization problem, yields a set point for generator G. When the SWL formulation is inexact, applying this
set point will cause different voltage levels than indicated by
the Wi variables in the SWL solution. The actual network
2900
Fig. 12. The active power gap p is several order of magnitude smaller when
αu,p is 3.0 instead of 1.0; for αu,p = 3.0, it is practically zero.
Fig. 13. The reactive power gap q is not influenced much by the voltage
sensitivity exponent βu,p .
state is determined by solving a power flow problem, where
the power injection by generator G is fixed to the obtained
value. Figure 14 shows that the error on the voltage magnitude, is always smaller than 1E-3 pu, and typically smaller than
1E-4. From this, it follows that when using the SWL formulation in a control scheme to generate set points for generator
G, the voltage constraint violation is at most 1E-3 across all
128 networks (and in 90% of the instances, smaller than 1E-4).
Similarly, the total network loss predicted by the inexact SWL
solution was at most 1% different, and less than 0.1% in 93%
of the network instances.
Finally, it is of interest how different the inexact SWL solution is from the best known solution to the SU formulation.
Note that solutions obtained with the SU formulation, are local
optima which are not guaranteed to be the global optimum,
and will always have an objective value which is larger than or
equal to the SWL solution for the same minimization problem.
Figure 15 shows the ‘optimality gap’, which is the difference
between the SWL and SU objective values, relative to the
SU value. For the case where αu,p = βu,p = 3.0, the gap
is several orders of magnitude smaller. Figure 16 shows how
much the active power set point for SWL deviates relatively
IEEE TRANSACTIONS ON SMART GRID, VOL. 12, NO. 4, JULY 2021
Fig. 14. The voltage magnitude predicted by the inexact SWL solutions,
differs at most by 1E-3 pu from the actual voltages obtained when applying
the SWL generator set points, and typically by less than 1E-4 pu.
Fig. 15. The optimality gap is the difference between the objective of the SU
and SWL formulation, relative to the SU objective value. The gap is several
orders of magnitude lower for αu,p = βu,p = 3.0.
from the set point for SU. The deviation is very small when
αu,p = 3.0, which is consistent with earlier results; the active
power gap for the power cones is nearly zero for those cases,
and the inexact SWL solution dispatches better active power
set points. For the absolute generator set points, refer to [28].
Figure 17 shows that the same does not hold for the reactive
power; whether βu,p is smaller or larger than 2, has a limited effect on the reactive power gap. This is to be expected,
as increasing/decreasing the reactive power consumption does
not affect the generation cost in an obvious way. Consuming
more reactive power might bring down the voltage magnitude
and the associated voltage-dependent active consumption, but
it might also increase the network losses. This differs from
the active power consumption, where an increase will clearly
increase the generation cost.
C. Multiple Distributed Generators
The previous case studies are likely to differ from a realistic
scenario because they have identical exponents for active and
reactive power and they only contain a single distributed generator (DG). This helped simplify the analysis and discussion
CLAEYS et al.: VOLTAGE-DEPENDENT LOAD MODELS IN UNBALANCED OPTIMAL POWER FLOW USING POWER CONES
2901
TABLE III
T HE P ROBLEM IS S OLVED FOR T WO PAIRS OF N ON -I DENTICAL α, β AND
FOR VARIOUS N UMBERS OF DG S . D EVIATIONS ARE R EPORTED FOR THE
DG S ET P OINTS AND VOLTAGE M AGNITUDE E RROR . N OTE T HAT ‘S UM ’
D ENOTES THE S UM OF THE A BSOLUTE VALUES , AND ‘M AX ’ THE
M AXIMUM
Fig. 16. The deviation of the active power set point for generator G (between
SWL and SU), is determined as the sum of the absolute deviations per phase,
relative to the total amount of active power. The deviations are several orders
of magnitude smaller for αu,p = βu,p = 3.0.
results. For the set point deviation, the maximum decreases as
the number of DGs increases, which can be expected as the
size of each individual DG decreases as well. The sum of the
set point error increases with the number of DGs, but remains
small relative to the delivered load (i.e., at most 2.28 kW cummulative error for 144 kW load). The error on the voltage
magnitude is calculated as in the previous case study, and
remains small, with 0.0012 pu as the highest deviation.
VI. C ONCLUSION
Fig. 17. The deviation of the reactive power set point for generator G, is
affected less than the active power by whether αu,p , βu,p are larger or smaller
than 2.
of the results. This final case study shows that αu,p = βu,p
and increasing the number of DGs, lead to similar results.
The case study is constructed by adding a variable number
of DGs to the LVTestCase feeder. This feeder has a total of
55 loads. If, e.g., 10 DGs are added, they are assigned to the
10 last buses (ordered by name) which have a load attached to
them. The total available dispatchable generation is 432 kW
and 141 kvar, about three times the total consumption. This
level ensures that even for 30 DGs, at least 20% of them
have inactive generation bounds at the solution, allowing for a
fair comparison of the obtained SU and SWL set points. The
available dispatchable generation is divided equally across the
DGs and phases; note that therefore the bounds are the same,
but not necessarily the set points.
Table III summarizes the results of this case study with
multiple DGs. The exponent values correspond to loads consisting of air conditioners and battery charge (Table I). The
difference between the DG set points obtained with the SU
DG
and SWL formulation, PDG
g,p +jQg,p , is significantly smaller
when α is 2.59 instead of 0.5, consistent with the previous
This article presents a general load model flexible enough
to represent both wye- and delta-connected, constant power,
constant impedance, constant current and ‘exponential’ load
models. This includes all load types present in common
unbalanced power flow test feeders [26]. Additionally, convex
relaxations were derived using power cones for the voltagedependent load model. As illustrated by the case study, these
models can be used to consider conservation voltage reduction in optimization models for distribution networks when
minimizing the generation cost. Though the relaxation is not
tight in all conditions, it yields high-quality solutions which
can certify the near-optimality of solutions to the non-linear
problem.
Molzahn et al. observed that a suitable relaxation of
constant-current loads with a negative proportionality coefficient often leads to a tight solution, unlike ones with a positive
coefficient [22]. This article extends this observation to general voltage-dependent units, with a qualitative argument and
numerical results. When the voltage-dependency of the active
power consumed by loads is quadratic or rises even faster as a
function of the voltage, the proposed relaxation is significantly
tighter. In this case, the relaxation only allows the active power
consumption to increase, which is rarely more optimal when
the objective is to minimize generation cost. This was confirmed by a case study covering 128 multiphase, low-voltage
networks.
The voltage-dependent model using power cones can be
used in balanced OPF problems as well. Future work will
focus on extending unbalanced OPF further to incorporate also
explicit four-wire models, which are not Kron-reduced.
2902
IEEE TRANSACTIONS ON SMART GRID, VOL. 12, NO. 4, JULY 2021
ACKNOWLEDGMENT
The views expressed herein are not necessarily the views
of the Australian government, and the Australian government
does not accept responsibility for any information or advice
contained herein.
R EFERENCES
[1] M. H. K. Tushar and C. Assi, “Volt-VAR control through joint
optimization of capacitor bank switching, renewable energy, and home
appliances,” IEEE Trans. Smart Grid, vol. 9, no. 5, pp. 4077–4086,
Sep. 2018.
[2] J. Barr and R. Majumder, “Integration of distributed generation in the
Volt/VAR management system for active distribution networks,” IEEE
Trans. Smart Grid, vol. 6, no. 2, pp. 576–586, Mar. 2015.
[3] P. Lusis, L. L. H. Andrew, S. Chakraborty, A. Liebman, and G. Tack,
“Reducing the unfairness of coordinated inverter dispatch in PV-Rich
distribution networks,” in Proc. IEEE Milan PowerTech, Jun. 2019,
pp. 1–6.
[4] M. Z. Liu et al., “On the fairness of PV curtailment schemes in residential distribution networks,” IEEE Trans. Smart Grid, vol. 11, no. 5,
pp. 4502–4512, Sep. 2020.
[5] V. Rigoni and A. Keane, “Open-DSOPF: An open-source optimal power
flow formulation integrated with OpenDSS,” in Proc. IEEE PES Gen.
Meeting, Apr. 2020, pp. 1–5.
[6] D. M. Fobes, S. Claeys, F. Geth, and C. Coffrin,
“PowerModelsDistribution.jl: An open-source framework for exploring
distribution power flow formulations,” Electr. Power Syst. Res., vol. 189,
Dec. 2020, Art. no. 106664.
[7] H. Ahmadi, J. R. Martí, and H. W. Dommel, “A framework for VoltVAR optimization in distribution systems,” IEEE Trans. Smart Grid,
vol. 6, no. 3, pp. 1473–1483, May 2015.
[8] Z. Wang, J. Wang, B. Chen, M. M. Begovic, and Y. He, “MPC-based
voltage/var optimization for distribution circuits with distributed generators and exponential load models,” IEEE Trans. Smart Grid, vol. 5,
no. 5, pp. 2412–2420, Sep. 2014.
[9] A. S. Carneiro, L. F. Araujo, J. L. R. Pereira, P. A. Garcia, I. D. Melo,
and M. B. Amaral, “Static load modeling based on field measurements,”
in Proc. IEEE Manchester PowerTech, Jun. 2017, pp. 1–5.
[10] T. Van Cutsem and C. Vournas, Voltage Stability of Electric Power
Systems. Dordrecht, The Netherlands: Kluwer, 1998.
[11] D. K. Molzahn and I. A. Hiskens, “A survey of relaxations and approximations of the power flow equations,” Found. Trends Electr. Energy
Syst., vol. 4, nos. 1–2, pp. 1–221, 2019.
[12] S. H. Low, “Convex relaxation of optimal power flow—Part I:
Formulations and equivalence,” IEEE Trans. Control Netw. Syst., vol. 1,
no. 1, pp. 15–27, Mar. 2014.
[13] W. Wei, J. Wang, N. Li, and S. Mei, “Optimal power flow of radial
networks and its variations: A sequential convex optimization approach,”
IEEE Trans. Smart Grid, vol. 8, no. 6, pp. 2974–2987, Nov. 2017.
[14] Y. Liu, J. Li, and L. Wu, “ACOPF for three-phase four-conductor
distribution systems: Semidefinite programming based relaxation with
variable reduction and feasible solution recovery,” IET Gener. Transm.
Distrib., vol. 13, no. 2, pp. 266–276, 2019.
[15] S. Gopinath et al., “Proving global optimality of ACOPF solutions,”
Electr. Power Syst. Res., vol. 189, Dec. 2020, Art. no. 106688.
[16] E. Dall’Anese, G. B. Giannakis, and B. F. Wollenberg, “Optimization
of unbalanced power distribution networks via semidefinite relaxation,”
in Proc. North Amer. Power Symp., Sep. 2012, pp. 1–6.
[17] L. Gan and S. H. Low, “Convex relaxations and linear approximation
for optimal power flow in multiphase radial networks,” in Proc. Power
Syst. Comput. Conference, Aug. 2014, pp. 1–9.
[18] Y. Liu, J. Li, L. Wu, and T. Ortmeyer, “Chordal relaxation based ACOPF
for unbalanced distribution systems with DERs and voltage regulation devices,” IEEE Trans. Power Syst., vol. 33, no. 1, pp. 970–984,
Jan. 2018.
[19] M. Bazrafshan, N. Gatsis, and H. Zhu, “Optimal power flow with stepvoltage regulators in multi-phase distribution networks,” IEEE Trans.
Power Syst., vol. 34, no. 6, pp. 4228–4239, Nov. 2019.
[20] C. Zhao, E. Dall’Anese, and S. H. Low, “Optimal power flow in
multiphase radial networks with delta connections: Preprint,” Nat.
Renew. Energy Lab. (NREL), Golden, CO, USA, Rep. NREL/CP-5D0067852, 2017.
[21] M. Usman, A. Cervi, M. Coppo, F. Bignucolo, and R. Turri, “Bus injection relaxation based OPF in multi-phase neutral equipped distribution
networks embedding wye- and delta-connected loads and generators,”
Int. J. Electr. Power Energy Syst., vol. 114, Jan. 2020, Art. no. 105394.
[22] D. K. Molzahn, B. C. Lesieutre, and C. L. DeMarco, “Approximate
representation of ZIP loads in a semidefinite relaxation of the OPF
problem,” IEEE Trans. Power Syst., vol. 29, no. 4, pp. 1864–1865,
Jul. 2014.
[23] L. T. K. Hien, “Differential properties of Euclidean projection onto
power cone,” Math. Methods Oper. Res., vol. 82, no. 3, pp. 265–284,
Dec. 2015.
[24] W. H. Kersting, “Radial distribution test feeders,” IEEE Trans. Power
Syst., vol. 6, no. 3, pp. 975–985, Aug. 1991.
[25] W. H. Kersting, Distribution System Modeling and Analysis. Boca Raton,
FL, USA: CRC Press, 2002.
[26] K. P. Schneider et al., “Analytic considerations and design basis for the
IEEE distribution test feeders,” IEEE Trans. Power Syst., vol. 33, no. 3,
pp. 3181–3188, May 2018.
[27] V. Rigoni, L. F. Ochoa, G. Chicco, A. Navarro-Espinosa, and T. Gozel,
“Representative residential LV feeders: A case study for the North West
of England,” IEEE Trans. Power Syst., vol. 31, no. 1, pp. 348–360,
Jan. 2016.
[28] S.
Claeys.
(Nov.
2020).
Set
Points
Obtained
for
Generator G in Large-scale Study. [Online]. Available:
https://doi.org/10.5281/zenodo.4275959
Sander Claeys (Student Member, IEEE) received
the dual M.Sc. degrees from KTH, Stockholm, and
UPC, Barcelona. He is currently pursuing the Ph.D.
degree in engineering science with the University
of Leuven, Belgium. His research focuses on the
modeling and optimization of electricity distribution
networks, in the context of smart grids.
Geert Deconinck (Senior Member, IEEE) received
the Ph.D. degree in engineering science from KU
Leuven, Belgium, in 1996. He is currently a Full
Professor with KU Leuven, where he heads the
Research Group on Electrical Energy Systems and
Applications and with EnergyVille Research Center.
His research focuses on distributed coordination
and control, specifically in the context of smart
electric-distribution networks.
Frederik Geth (Member, IEEE) received the B.Sc.,
M.Sc., and Ph.D. degrees from the University of
Leuven, Belgium, in 2007, 2009, and 2014, respectively. He is a Research Scientist working with the
CSIRO, Newcastle, Australia, in the energy systems
program. His current research focus is applications
of optimization models in distribution network operations, including unbalanced state estimation and
optimal control of battery storage systems.