Mathematics
0292014
Contents
Sets Of Numbers ............................................................................................................................................................ 2
Some Lexicon To Start.................................................................................................................................................... 4
Intervals .......................................................................................................................................................................... 5
Functions ........................................................................................................................................................................ 6
Sequences.....................................................................................................................................................................14
Limits ............................................................................................................................................................................16
Notable Limits ..............................................................................................................................................................17
Asymptotes ..................................................................................................................................................................18
Continuity .....................................................................................................................................................................19
Geometric Series ..........................................................................................................................................................19
Derivatives....................................................................................................................................................................20
Integrals ........................................................................................................................................................................24
1
0292014
SETS OF NUMBERS
→ NATURAL NUMBERS
We indicate with N the set of natural numbers: N = {1, 2, 3, . . . }
This is the extensive form of declaration, which means declaring each element of the set.
We indicate with N0 the set of natural numbers with zero: N0
= {0, 1, 2, 3, . . . }
Of course, N ⊂ N0, namely the natural numbers’ set is a subset of the natural numbers’ set containing the
zero. On this sets, the operation of sum is defined, but subtraction cannot always be performed.
→ INTEGER NUMBERS
We indicate with Z the set of integer numbers: Z
= {. . . ,−3,−2,−1, 0, 1, 2, 3, . . . }
Thus, Z is the union of N0, that represents only positive numbers, and the set of negative numbers. Note
that N ⊂ N0 ⊂ Z, namely both the natural numbers’ sets are subsets of the integer numbers’ set.
In this set we can sum and subtract numbers, as we can also multiply numbers, but division between
number cannot always be performed.
→ RATIONAL NUMBERS
We indicate with Q the set of rational numbers, which are obtained by dividing an integer number by
another integer number different from zero.
In symbols: Q
={
𝑚
𝑛
| m ∈ Z, n ∈ Z\{0} }
Which is read as: “number” such that “m” belongs to the integer numbers’ set and that “n” belongs to the
integer numbers’ set, but the latter must be different from zero. Note that, if we set n = 1, we obtain the set
Z again.
Thus, N ⊂ N0 ⊂ Z ⊂ Q. The set Q is large enough to make sum, subtraction, multiplication and division.
•
SUM:
•
INVERSE:
𝑛
𝑚
1
𝑛
𝑚
+
=
𝑘
𝑞
=
𝑚
𝑛
𝑛𝑞+𝑘𝑚
•
𝑚𝑞
or
𝑛 −1
(𝑚)
=
PRODUCT:
𝑛
𝑚
×
𝑘
𝑞
=
𝑛 ×𝑘
𝑚×𝑞
𝑚
𝑛
Other operations with the rational numbers’ set are:
𝑚 𝑘
𝑚𝑘
𝑚 −𝑘
•
K
•
Given q ∈ Q, it is possible to show that: 𝑞 𝑚
•
Given q ∈ Q, q ≠0, we have q0 = 1.
TH
POWER:
(𝑛 ) =
𝑛𝑘
or
(𝑛)
𝑘
𝑚 −1
= [( ) ] =
𝑛
𝑛𝑘
𝑚𝑘
× 𝑞 𝑛 = 𝑞 𝑚+𝑛
for n,m ∈ Z.
2
0292014
So far we have expressed the elements of Q as fractions, but they can also be expressed in decimal
notation, which is either finite or infinite with a period.
THEOREM
Let q =
𝑛
𝑚
be a rational number; then there are two mutually exclusive possibilities:
→ The decimal representation of q is made by a finite number of digits;
→ The decimal representation of q is made by an infinite number of digits but it is
periodic.
The set Q is insufficient for many purposes: for instance there exist numbers, such as √2, which are not
rational, meaning that they are NOT contained in Q. These numbers are called irrational numbers.
→ IRRATIONAL NUMBERS
The numbers not contained in the rational numbers’ set are called irrational numbers and are those
whose decimal representation is not finite, nor periodic. Some examples are all the square roots of
numbers which are not perfect square, The Euler’s number (e), The Pi number (π).
The operations of sum (+) and multiplication (·) between pairs of real numbers are defined and have the
following properties:
•
•
•
Associative property: (a + b) + c = a + (b + c); (a · b) · c = a · (b · c);
Commutative property: a + b = b + a; a · b = b · a;
Distributive property: a · (b + c) = a · b + a · c
•
Existence of the neutral element: for any a ∈ R there are two distinct numbers, namely 0 and 1,
such that a + 0 = a and a · 1 = a. These numbers are called the neutral number of sum and
multiplication.
•
Existence of the opposite: for any a ∈ R there is a real number −a such that a + (−a) = 0, which is
called the opposite of a.
•
Existence of the inverse: for any a ∈ R there is a real number 1 a such that a ·
for all a, b, c ∈ R
for all a, b ∈ R
for all a, b, c ∈ R
1
𝑎
= 1, which is
called the inverse of a.
•
Completeness: Let A,B two non-empty subsets of real numbers, different from zero; let’s assume
that any number in A is smaller than or equal to any other number in B; then there exists a real
number c such that c is larger than a and smaller than b, for any a in A and for any b in B. The
number c is called the separating point of A and B.
3
0292014
SOME LEXICON TO START
→ EXTENSIONAL AND INTENSIONAL DEFINITIONS
A set may contain infinite objects, so it may be complicated listing all of them and for this reason,
sometimes we use intensional definitions instead of extensional definitions: the latter declares all the
objects in the set, while the former states the property which unambiguously defines the objects in the set.
→ QUANTIFIERS
•
•
∈ A.
To say that the object a is not contained in the set A, we write a ∉ A.
To say that a certain property holds for ALL objects in A we write ∀a ∈ A.
•
To say that a certain property holds for AT LEAST ONE object in A we write ∃a
•
To say that a certain property holds for NO objects in A we write ∄a
•
•
To say that the object a is contained in the set A, we write a
∈ A.
∈ A.
To say that a certain property hold for ONLY ONE element in A, we write ∃!a ∈ A.
→ OPERATIONS WITH SETS
•
Let A and B be two sets. We denote by A ∪ B the set containing all the elements of A and all
the elements of B.
A ∪ B = {x : x ∈ A or x ∈ B}
•
Let A and B be two sets. We denote by A ∩ B the set containing the elements in common
between A and B.
A ∩ B = {x : x ∈ A and x ∈ B}
•
Let A and B be two sets. An empty set is a set with no elements, and is denoted by ∅
•
Let A and B be two sets. We write A
•
•
•
⊆ B if all the elements of A are also elements of B.
Let A and B be two sets. We write A ⊂ B if all the elements of A are also elements of B and
we know that some elements of B are not in A.
Let A and B be two sets. The “A minus B” set, denoted by A\B, is the set containing the
elements in A which are not in B.
A\B = {x ∈ A : x ∉ B}
Let S be the universal set and B a subset of S. The complement set of B is the “S minus
B” set, namely the set of elements of S that are not contained in B.
Bc= S\B = {x ∈ S : x ∉ B}
→ ABSOLUTE VALUE
Let a ∈ R. The absolute value of a, denoted by |a|, is given by:
a
−a
|a| = {
if a ≥ 0
if a < 0
4
0292014
INTERVALS
A real interval with extremes a, b ∈ R such that a ≤ b, is the set of all real numbers between a and b.
We say that a real interval is:
→ Open if extremes a and b are not included and we denote it by (a, b)
→
→
→
→
{𝒙 ∈ 𝑹 | 𝒂 < 𝒙 < 𝒃}
Closed if extremes a and b are included and we denote it by [a, b]
{𝒙 ∈ 𝑹 | 𝒂 ≤ 𝒙 ≤ 𝒃}
Not open nor closed one of the extreme is included and the other is not, that is [a, b) or (a, b]
{ 𝒙 ∈ 𝑹 | 𝒂 ≤ 𝒙 < 𝒃} or { 𝒙 ∈ 𝑹 | 𝒂 < 𝒙 ≤ 𝒃}
Bounded if both a and b are finite numbers
Unbounded if either a, or b or both are infinite, e.g. (−∞, 1], (−3, +∞), (−∞, +∞)
Let’s add a bit of logic to the mixture: An assertion that can be either true or false is a statement.
Consider two statements, say statements P and statement Q. We say that P ⇒ Q to mean “If P holds
true than also Q holds true” or “P implies Q”.
→ We say that P is a sufficient condition for Q. Indeed it is sufficient that P is true to get that also
Q is true.
→ We also say that Q is a necessary condition for P. Indeed, if P is true then necessarily Q is
true.
If P ⇒ Q and Q ⇒ P then assertion P and assertion Q are equivalent and we write P ⇔ Q to mean “P if
and only if Q”. In this case P is both a sufficient and a necessary condition for Q.
→ DISTANCE BETWEEN TWO POINTS
Let a ∈ R; the distance between a and the origin is the length of the segment line between the origin and
point a, hence it corresponds to a if a > 0 and −a if a < 0. Put in other words:
d(a, 0) = |a|
Let x1 ∈ R and x2 ∈ R; the distance between x1 and x2 is given by:
d(x1, x2) = |x1 − x2|
Note that, by definition:
•
•
•
d(x1, x2) ≥ 0, ∀x1, x2 ∈ R;
d(x1, x2) = 0 if and only if x1 and x2 are the same point;
d(x1, x2) = d(x2, x1), since |x1 − x2| = |x2 − x1|.
5
0292014
FUNCTIONS
Let’s give us a general definition of what a function is: Let A and B be two sets; a function f defined on A
and with values in B is a law/correspondence that associates to any element x ∈ A one and only one
element y ∈ B. To indicate a function we use the notation
f : A → B or y = f(x).
Let’s now see the definition of a Real Function of a real variable: Let D ⊆ R (eventually D = R); a real
function of a real variable is a law that associates to any real number x ∈ D one and only one real
number y ∈ R such that y = f(x).
The variable x is called the independent variable while the variable y is called the dependent variable.
Instead, in Economics x is also called the exogenous variable and y the endogenous variable.
In all cases y is called the image of x through the function f.
→ DOMAIN OF A FUNCTION
The set D of all real values for which the law f makes sense is called the domain of the function f:
D = {x ∈ R : f(x) is well defined}
Three cases require computations:
•
f(x) contains a division;
𝑃(𝑥)
Let f(x) = 𝑄(𝑥), and assume that Q(x) makes sense for all x ∈ R. Then the function f(x) is well
defined if and only if Q(x)≠0. This means that
D = {x ∈ R : Q(x)≠0}
•
f(x) contains a root with even power;
𝑛
Let f(x) = √𝐺(𝑥), and assume that G(x) makes sense for all x ∈ R. There are two possibilities:
• if n is even, then the function f(x) is well defined if and only if G(x) ≥ 0. This means that
D = {x ∈ R : G(x) ≥ 0}
• if n is odd, then the function f(x) is well defined for all x ∈ R.
•
f(x) contains a logarithm or any combinations of the above conditions.
Let f(x) = log H(x), and assume that H(x) makes sense for all x ∈ R. Then the function f(x) is well
defined if and only if H(x) > 0. This means that
D = {x ∈ R : H(x) ≥ 0}
6
0292014
→ RANGE OF A FUNCTION
Intuitively, the range of a function is the set of all points of R that can be obtained by applying the function
f to the points of D, namely the domain. That is, the set of all possible dependent variables.
We can also say that the range is the set of all images of points of the domain through the function f. The
formal definition is:
Let f : D → R be a function. The range of f is the set:
R = {y ∈ R : y = f(x), ∀x ∈ D}
→ ODD OR EVEN FUNCTIONS
Let f : D → R be a function. f is even if {
for any x ∈ D then also − x ∈ D
f(−x) = f(x)
Because of f(x) = f(−x) for all x ∈ R, then the plot of the graph of the function is
symmetric with respect to the vertical axis, namely x = 0.
for any x ∈ D then also − x ∈ D
Let f : D → R be a function. f is odd if {
f(−x) = −f(x)
Because of f(−x) = −f(x) for all x ∈ R, then the plot of the graph of the function is
anti-symmetric with respect to the vertical axis, or better said, is symmetric with
respect to the origin.
7
0292014
→ INCREASING OR DECREASING FUNCTIONS
Let f : D → R a function and let I = (a, b) ⊆ D an open interval. The function f is strictly increasing in I if:
∀x1, x2 ∈ I : x1 < x2 ⇒ f(x1) < f(x2)
Instead, The function f is increasing, letting us leave a chance for it to be constant in some part, if:
∀x1, x2 ∈ I : x1 < x2 ⇒ f(x1) ≤ f(x2)
Let f : D → R a function and let I = (a, b) ⊂ D an open interval. The function f is strictly decreasing in I if:
∀x1, x2 ∈ I : x1 < x2 ⇒ f(x1) > f(x2)
The function f is decreasing, letting us leave a chance for it to be constant in some part, if:
∀x1, x2 ∈ I : x1 < x2 ⇒ f(x1) ≥ f(x2)
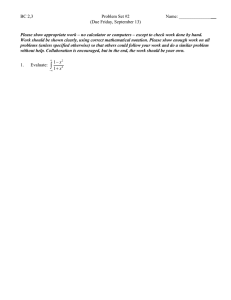
→ INJECTIVE OR SURJECTIVE FUNCTIONS
A function f : X → Y is injective if the images of distinct points in X
correspond to distinct points in Y; more formally, Let f : X → Y be a
function, with X ⊆ D, Y ⊆ R. f is said to be injective in X if
∀x 1 , x 2 ∈ X, if x 1 , x 2 , ⇒ f(x 1 ) , f(x 2 )
Equivalently, f is said to be injective in X if for all x 1 , x 2 ∈ X such
that f(x1) equals f(x2), then x 1 equals x 2 .
A function f : X → Y is surjective if all the elements of the co domain are “reached” by the function; more formally, a function f : X
→ Y is said to be surjective if
∀y ∈ Y, ∃x ∈ X : y = f(x)
A function f : X → Y is said to be bijective if it is both injective and
surjective; This function is injective because it associates to
distinct elements in X distinct elements in Y and at the same time it
is surjective because all elements of Y are “reached” by the
function.
8
0292014
→ THE INVERSE FUNCTION
Let f : X → Y be a function, with X ⊆ D and Y ⊆ R. f is invertible if and only if f is bijective.
Moreover the inverse function f − 1 : Y → X exists and it is unique.
Let f : X → Y be an invertible function, with X ⊆ D and Y ⊆ R. Then the inverse function
f − 1 : Y → X is the function that verifies
f(f − 1 (y)) = y and f − 1 (f(x)) = x
SUFFICIENT CONDITIONS FOR INVERTIBILITY
Sufficient conditions for a function to be invertible are: if f is strictly monotonic in X, and Y
coincides with the set of all images of real numbers in X , then f is invertible.
EXAMPLE.
f : (−∞, 0] → [0, +∞),
f(x) = x2
f is injective and surjective; therefore, the inverse exists and it is unique. To determine it,
we solve the equation y = x2 with respect to x.
Note that now we are looking for negative x, as it is asked by the domain.
We have: y = x2 ⇔ x = − √𝑦.
So the inverse is the function f −1 : [0, +∞) → (−∞, 0] is f−1(y) = − √𝑦.
→ LINEAR FUNCTIONS
f : R → R | f(x)=mx+q
m, q ∈ R
Graphically, this is the equation of a straight line, with the slope of m=
y2−y1
x2−x1
=
f (x2)−f (x1)
,
x2−x1
for
any x 1 , x 2 .
•
•
•
•
If m
If m
If m
The
> 0 the function is increasing;
< 0 the function is decreasing;
= 0 we have a flat (horizontal) line;
absolute value of m indicates how fast the line increases or decreases .
HOW TO COMPUTE A LINEAR FUNCTION
•
•
Point-slope equation. Let P1 = (x1, y1) be a point on the line and m the slope; then the equation
of the line through P1 with slope m is y − y1 = m(x − x1).
Two points. Let P1 = (x1, y1) and P2 = (x2, y2) be two points on the line; to compute the equation
y2−y1
of the line we first compute the slope: m = x2−x1 and next we use the formula y − y1 = m(x − x1).
9
0292014
→ QUADRATIC FUNCTIONS
f : R → R | f(x) = ax 2 + bx + c
a, b, c ∈ R, a≠0
Graphically, this is the equation of a parabola, which can be convex if a > 0, or concave if
a < 0. The vertex of the parabola is the point with coordinates
𝑏
V = (− 2𝑎 ; −
•
∆
),
4𝑎
with ∆ = b 2 − 4ac
Position of a parabola with respect to the x -axis
Let ∆ = b 2 − 4ac; suppose that a > 0:
I.
If ∆ > 0 The parabola intercepts the x-axis at two points, which are the
solutions of ax 2 + bx + c = 0;
II.
If ∆ = 0 The parabola intercepts the x-axis at one point, which is the unique
solution of ax 2 + bx + c = 0;
III.
If ∆ < 0 The parabola stays always above the x-axis: ax 2 + bx + c = 0 does not
have any solution
•
Position of a parabola with respect to the x -axis
Let ∆ = b 2 − 4ac; suppose that a < 0:
I.
If ∆ > 0 The parabola intercepts the x-axis at two points, which are the solutions
of ax 2 + bx + c = 0
II.
If ∆ = 0 The parabola intercepts the x-axis at one point, which is the unique
solution of ax 2 + bx + c = 0
III.
If ∆ < 0 The parabola stays always below the x-axis: ax 2 + bx + c = 0 does not
have any solution
10
0292014
→ POWER FUNCTIONS
For all n ∈ N we define the function f(x) = x n , which is nothing but the multiplication of x by
itself n times, which is defined for all x ∈ R, D = R
If n is even, the range is Rf = [0, +∞) and the function is only invertible in [0, +∞); if n is odd,
the range is Rf = R and the function is globally invertible (in R).
→ EXPONENTIAL FUNCTIONS
f(x) = a x ,
a > 0
The main characteristics of the exponential function is that its domain is found in R, while
its range is found in (0, +∞), meaning that a x > 0 for all x ∈ R.
f(0) = a 0 = 1
•
•
•
If a > 0 the function is monotonic strictly increasing ;
If 0 < a < 1 the function is monotonic strictly decreasing;
If a = 1 we get the flat line.
→ LOGARITHMIC FUNCTIONS
f(x) = log a (x),
a > 0, a≠1
This is the inverse of the exponential function; its domain is found in (0, +∞), while its range
is found in R.
f(1) = log a (1) = 0 (this is a consequence of the fact that a 0 = 1)
•
•
if a > 0 the function is monotonic strictly increasing
if 0 < a < 1 the function is monotonic strictly decreasing
11
0292014
→ GRAPHICAL REPRESENTATION
The graph of f −1 (x) is obtained by reflecting the graph of f(x) over the line y = x
→ THE COMPOSITE FUNCTION
Consider a function f : X → Y and another function g : Y → Z ; the composite function,
denoted by g ◦ f, is defined as: g ◦ f : X → Z
which means that it has the domain of the function f(x) and the range of the function g(x).
The order of composition matters. That is, in general :
g(f(x)) ≠ f(g(x))
→ MAXIMUM AND MINIMUM
Let 𝑓 ∶ 𝐷 ⊑ 𝑅 → 𝑅; let Ι ⊑ 𝐷 be a subset if D; we say that f attains a maximum in I if
∃𝒙𝑴 𝝐𝑰: ∀𝒙𝝐𝑰 → 𝒇(𝒙) ≤ 𝒇(𝒙𝑴 )
Let 𝑓 ∶ 𝐷 ⊑ 𝑅 → 𝑅; let Ι ⊑ 𝐷 be a subset if D; we say that f attains a minimum in I if
∃𝒙𝒎 𝝐𝑰: ∀𝒙𝝐𝑰 → 𝒇(𝒙) ≥ 𝒇(𝒙𝒎 )
12
0292014
→ WEIERSTRASS THEOREM
Maxima and minima are not guaranteed to exist. The Weierstrass theorem provides sufficient conditions
under which a function has maxima and minima in a subset of its domain: Any function f : D → R which
is continuous function on a closed and bounded interval [a, b] admits a maximum and a minimum in [a,
b] . Or better said,
Let f : D → R be a function. If:
• f is continuous in an interval [a, b]
• [a, b] is closed and bounded
then there is a point xm ∈ [a, b] and a point xM ∈ [a, b] such that f (xm) = m is the minimum of f in [a, b]
and f (xM) = M is the maximum of f in [a, b].
So, to apply Weierstrass Theorem, three conditions must hold:
•
•
•
f is continuous in [a, b];
The interval [a, b] is closed (i.e. no round brackets);
The interval [a, b] is bounded (i.e. a ≠ −∞ and b ≠ +∞).
→ INTERMEDIATE ZERO THEOREM
For any continuous function in a closed and bounded interval which in takes both positive and negative
values in that interval, there exists at least one point in which the function is equal to zero.
Let f : D → R be a function. If:
• f is continuous in [a, b]
• [a, b] is a closed and bounded interval
• there are two points x1, x2, ∈ [a, b] such that: f (x1) < 0 and f (x2) > 0
then there exists a point x1 < x0 < x2 (or x2 < x0 < x1) such that f (x0) = 0.
13
0292014
SEQUENCES
Intuitively, a sequence is a function which associates to each natural number n ∈ N a real
number s n ∈ R.
DEFINITION
A sequence is any function s : N → R. A sequence is denoted by (s n ) n∈ N , whereas we
denote by s n the n t h element of the sequence.
EX A M P LE
the elements of s n =
1
𝑛
approach 0 as n grows
1
𝑛
n
1
1
2
0.5
3
0.333333...
The elements of s n =
𝑛
𝑛+1
approach 1 as n grows
𝑛
𝑛+1
n
1
0.5
2
0.6667
3
0.75
The elements of s n = (−1) n swing between 1 and −1
n
(−1) n
1
-1
2
1
3
-1
14
0292014
→ THE LIMITS OF A SEQUENCE (TOWARD UNIFORMITY)
Let (s n ) n ∈ N be a sequence; we say that (s n ) n ∈ N converges and we write 𝐥𝐢𝐦 𝒔𝒏 = 𝒍
𝒏→∞
where 𝒍 ∈ R is a finite real number, if: ∀𝜺 > 0 ∃ n 𝜺 ∈ N : ∀n > n 𝜺 ⇒ |s n − 𝒍 | < 𝜺
which means that for all length 𝜺 (as small as we like), we can find a natural number n 𝜺
such that for all indices n that are larger than n 𝜺, the distance between s n and the limit 𝒍 is
smaller than 𝜺. That means, s n approaches 𝒍, when n is very large.
→ THE LIMITS OF A SEQUENCE (DEVIATION)
Let (s n ) n ∈ N be a sequence; we say that (s n ) n ∈ N diverges to +∞, we write 𝐥𝐢𝐦 𝒔𝒏 = +∞ if
𝒏→∞
∀M > 0 ∃ n M ∈ N : ∀n > n M ⇒ s n < M
which means that for all length M, we can find a natural number n M such that for all indices
n that are larger than n M , the sequence s n is smaller than M.
Let (s n ) n∈N be a sequence; we say that (s n ) n∈ N diverges to −∞, we write 𝐥𝐢𝐦 𝒔𝒏 = −∞ if
𝒏→∞
∀M > 0 ∃ n M ∈ N : ∀n > n M ⇒ s n < −M
which means that for all length M, we can find a natural number n M such that for all indices
n that are larger than n M , the sequence s n is smaller than minus M.
→ THE COMPARISON THEOREM
Let (an)n∈N, (sn)n∈N, (bn)n∈N be three sequences such that an ≤ sn ≤ bn
The following three results hold:
•
•
•
If an → l and bn → l then also sn → l
If an → +∞ then also sn → +∞
If bn → −∞ then also sn → −∞
→ INCREASING AND DECREASING SEQUENCES
A sequence (sn)n∈N is said to be
• strictly increasing if sn < sn+1 for all n;
• increasing if sn ≤ sn+1 for all n;
• strictly decreasing if sn > sn+1 for all n;
• decreasing if sn ≥ sn+1 for all n.
Let (sn)n∈N be increasing. Then sn → l if and only if ∃M such that sn ≤ M, for all n.
Let (sn)n∈N be decreasing. Then sn → l if and only if ∃M such that sn ≥ M, for all n.
15
0292014
LIMITS
Limits serve to answer the following question s “how does a function behave when x gets
closer and closer to a point x0?” and “how does a function behave when x gets larger and
larger?”.
Interesting cases are particular points of the domain where the function is not defined, i.e.
outside its domain, but on the boundary; +∞/ − ∞, if the domain is unbounded from
above/below. We will consider four cases:
•
“Finite limit at a point”: lim x→x0 f (x) = l
∀𝜀 > 𝑂 ∃𝛿 > 0: ∀𝑥 𝜖 𝐷: |𝑥 − 𝑥𝑜| < 𝛿 𝑥 ≠ 𝑥0 → |𝑓(𝑥) − 𝑙| < 𝜀
•
“Finite limit at infinity”: lim x→±∞ f (x) = l
∀𝜀 > 𝑜 ∃𝑘 > 0: ∀𝑥 𝜖 𝐷: 𝑥 > 𝑘 → |𝑓(𝑥) − 𝑙| < 𝜀 unbounded from the right
∀𝜀 > 𝑜 ∃𝑘 > 0: ∀𝑥 𝜖 𝐷: 𝑥 < −𝑘 → |𝑓(𝑥) − 𝑙| < 𝜀 unbounded from the left
•
“Infinite limit at a point”: lim x→x0 f (x) = ±∞
∀𝑀 > 𝑜 ∃𝛿 > 0: ∀𝑥 𝜖 𝐷: |𝑥 − 𝑥0 | < 𝛿; 𝑥 ≠ 𝑥0 → 𝑓(𝑥) > 𝑀
∀𝑀 > 𝑜 ∃𝛿 > 0: ∀𝑥 𝜖 𝐷: |𝑥 − 𝑥0 | < 𝛿; 𝑥 ≠ 𝑥0 → 𝑓(𝑥) < −𝑀
•
“Infinite limit at infinite”: lim x→±∞ f (x) = ±∞
∀𝑀 > 0 ∃𝜅 > 0: ∀𝑥 ∈ 𝐷: 𝑥 > 𝑘 → 𝑓(𝑥) > 𝑀
∀𝑀 > 𝑂 ∃𝜅 > 0: ∀𝑥 𝜖 𝐷: 𝑥 < −𝜅 → 𝑓(𝑥) < −𝑀
∀𝑀 > 0 ∃𝑘 > 0: ∀𝑥 𝜖 𝐷: 𝑥 > 𝑘 → 𝑓(𝑥) < −𝑀
∀𝑀 > 0 ∃𝑘 > 0: ∀𝑥 𝜖 𝐷: 𝑥 < −𝑘 → 𝑓(𝑥) > 𝑀
→ PIECEWISE-DEFINED FUNCTIONS
A piecewise-defined function is a function defined by multiple sub -functions on different
intervals.
→ LEFT AND RIGHT LIMITS
Let f : D ⊆ R ⇒ R be a function. Let x0 be a limit point of D. We say that lim 𝑓(𝑥)= l if ∀𝜀 >
𝑋 →𝑥0
0 ∃𝛿 > 0 ∀𝑥 ∈ 𝐷: 0 < 𝑥 − 𝑥0 < 𝛿; 𝑥 ≠ 𝑥0 → |𝑓(𝑥) − ⅇ| < 𝜀
Let f : D ⊆ R ⇒ R be a function. Let x0 be a limit point of D. w e say that lim 𝑓(𝑥)= l if ∀𝜀 >
𝑋 →𝑥0
0 ∃𝛿 > 0: ∀𝑥 𝜖 𝐷: −𝛿 < 𝑥 − 𝑥0 < 0; 𝑥 ≠ 𝑥0 → |𝑓(𝑥) − 𝑙| < 𝜀
16
0292014
NOTABLE LIMITS
→ OTHER NOTABLE LIMITS
17
0292014
ASYMPTOTES
→ VERTICAL ASYMPTOTES
A vertical asymptote is a vertical line that approximates the trend of the graph of a
function in the neighborhood of a finite point x 0 , obligatorily of accumulation. We speak of
a vertical asymptote when it occurs in
How to compute it? First, we find the domain of the function and if it is defined by a finite
number, we look for vertical asymptotes in its right and left neighborhood; if the result is
minus or plus infinite, the point is an asymptote.
→ HORIZONTAL ASYMPTOTES
Horizontal asymptotes are horizontal lines that the graph of the function approaches
as x → ±∞. The horizontal line y = c is a horizontal asymptote of the function y = ƒ(x) if
How to compute it? First, we find the domain of the function and if any infinite is an
extreme point of the domain, we look for horizontal asymptotes in minus and plus infinite;
if the result is a finite number, the point is an asymptote.
→ SLANT ASYMPTOTES
When a linear asymptote is not parallel to the x- or y-axis, it is called an oblique
asymptote or slant asymptote. A function ƒ(x) is asymptotic to the straight
line y = mx + n (m ≠ 0) if
How to compute it? First we need to find the slope of the asymptote by computing the limit
of x that goes to infinity of the function divided by x; after that, we compute the limit of x
that goes to infinity of the function minus the slope multiplied by x. We should have the
equation of a straight line by now, which is the equation of the slant asymptote.
18
0292014
CONTINUITY
Let f : I ⊆ D → R be a function. We say that f is continuous in I , which is an interval, if f is
continuous in any point x ∈ I.
Let f : D → R be a function and let x 0 ∈ D. We say that f is continuous in x 0 , namely a point,
if limx→x0 f (x) exists finite and:
lim 𝑓(𝑥) = 𝑓(𝑥0 )
𝑥 →𝑥0
There are some conditions for it to be continuous in a point , and all of them has to be met:
•
•
x0 ∈ D
lim 𝑓(𝑥) = lim 𝑓(𝑥) = L with L≠±∞
•
L = f (x 0 )
𝑥 →𝑥0
𝑥 →𝑥0
If at least one of them isn’t met, we have a discontinuity; there are three types of them:
→ Jump discontinuity, if left and right limits have not the same results;
→ Removable discontinuity, a point at which a graph is not connected but can be made
connected by filling in a single point ;
→ Essential discontinuity, if either or both the left and right limit result into infinity.
GEOMETRIC SERIES
Let x ∈ R and consider the following sum:
Sn(x) = 1 + x + x 2 + x 3 + · · · + x n
Recall that Sn(x) can be re-written using the summation symbol: ∑𝑛𝑘=0 𝑥 𝑘 ; the sum is called
Geometric sum.
Assume now that we want to compute Sn(x) when n becomes very large. Observe that Sn(x)
is a sequence, and thus we can try to compute its limit, th at we denote by:
∑𝒏𝒌=𝟎 𝒙𝒌 = 𝐥𝐢𝐦 𝐒𝐧(𝐱)
𝒏→∞
which is called Geometric series. The result of the limit is given by
the geometric series will have the result
19
0292014
DERIVATIVES
A function f : D ⊆ R → R is said to be differentiable in x0 ∈ int(D), which denotes the set of
the interior points of D, if:
𝒇(𝒙𝟎 + 𝒉) − 𝒇(𝒙𝟎 )
𝒉→𝟎
𝒉
∃𝑳 = 𝒍𝒊𝒎
We call L = f 0 (x 0 ). We define the left and right derivative of f in x 0 the two limits:
∃𝐿 = 𝑙𝑖𝑚
𝑓(𝑥+ℎ)−𝑓(𝑥)
ℎ→0
ℎ
∃𝐿 = 𝑙𝑖𝑚
ℎ→0
𝑓(𝑥+ℎ)−𝑓(𝑥)
ℎ
→ GEOMETRIC INTERPRETATION
Let f be differentiable in x0. Find the equation of the straight line passing through A = (x0, f
(x0)) and B = (x0 + h, f (x0 + h)). Generic equation of the straight line y = mx + c :
•
•
A belongs to the line → f (x 0 ) = m h x 0 + c h .
B belongs to the line → f (x 0 + h) = m h (x 0 + h) + c h .
Then we need to subtract the two→ f (x0 + h) − f (x0) = m h x 0 + m h h + c h − m h x 0 − c h = m h h
which will results into the incremental ratio we have seen before.
→ FIRST THEOREM
If f is differentiable in x 0 then it is continuous in x 0 , which means that continuity is a
necessary condition for differentiability, although it is not sufficient.
→ SECOND THEOREM
Let f : D ⊆ R → R and g : D ⊆ R → R be two functions differentiable in x 0 . For all α ∈ R and
β ∈ R, the function α f + β g : D ⊆ R → R defined as (α f + β g) (x) = αf (x) + βg (x), ∀x ∈ D
is differentiable in x 0 and (α f + β g)’ (x 0 ) = α f’ (x 0 ) + β g’ (x 0 ).
Also the function f · g : D ⊆ R → R defined as (f · g) (x) = f (x) · g (x), ∀x ∈ D is
differentiable in x 0 and (f · g)’ (x 0 ) = f’ (x 0 ) g (x 0 ) + f (x 0 ) g’ (x 0 ).
Let f : D ⊆ R → R and g : E ⊆ R → R with f (D) ⊆ E. Hence it is possible to define (g ◦ f ) :
D ⊆ R → R in the standard way (g ◦ f ) (x) = g (f (x)), ∀x ∈ D. Then (g ◦ f) is differentiable in
x 0 and (g ◦ f )’ (x0) = g’ (f (x 0 )) f’ (x 0 ).
20
0292014
→ CUSP AND INFLECTION POINT
Let f : D ⊆ R → R be a function and let x 0 be a point such that lim 𝑓′= +∞ and lim 𝑓′= -∞,
𝑥 → 𝑥0
𝑥 → 𝑥0
or viceversa, In this case the point x 0 is called a cusp point.
Let f : D ⊆ R → R be a function and let x 0 be a point such that lim 𝑓′= +∞ and lim 𝑓′= -∞, or
𝑥→0
𝑥→0
viceversa, In this case the point x 0 is called an inflection point with vertical tangent.
If the second derivative of the function is equal to zero and changes its sign in x 0 , we say
that x 0 is an inflection point with horizontal tangent.
→ THREE IMPORTANT THEOREMS
ROLLE’S THEOREM: Let f : [a, b] → R be continuous on [a, b] and differentiable on (a, b).
If f (a) = f (b) then ∃x 0 ∈ (a, b) such that f’ (x 0 ) = 0.
LAGRANGE’S THEOREM: Let f : [a, b] → R be continuous on [a, b] and differentiable in (a,
b). There exists a point x 0 ∈ (a, b) such that f (b) − f (a) = (b − a) f’ (x 0 ).
CAUCHY’S THEOREM: Let f : [a, b] → R and g : [a, b] → R be cont inuous in [a, b] and
differentiable in (a, b). Then there exists a x 0 ∈ (a, b) such that
(f (b) − f (a)) g’ (x0) = (g (b) − g (a)) f’ (x0)
→ LOCAL MAXIMA AND MINIMA
Let f : [a, b] → R be a function.
A point x 0 ∈ (a, b) is a local minimum if there exists a sufficiently small δ > 0 such that
(x 0 − δ, x 0 + δ) ⊆ (a, b) and f (x) ≥ f (x 0 ), ∀x ∈ (x 0 − δ, x 0 + δ).
A point x0 ∈ (a, b) is a local maximum if there exists a sufficiently small δ > 0 such that
(x 0 − δ, x 0 + δ) ⊆ (a, b) and f (x) ≤ f (x 0 ), ∀x ∈ (x 0 − δ, x 0 + δ).
21
0292014
→ FERMAT’S THEOREM
Let f : [a, b] → R and x 0 ∈ (a, b). If f attains a local min or max in x 0 then either f’ (x 0 ) = 0
or ∄f’ (x0).
In order to find local maxima and/or minima, we have to look for critical points, which we
have to check first, as it may happen that none of them is either a max or min.
Let f : [a, b] → R be differentiable in x 0 . If f’ (x 0 ) = 0 the point x 0 is called a critical point.
How to find a local minimum and maximum? We have to isolate the points in which the
function is not differentiable such as angle points; then we have to find out all the points
such that f’(x 0 )= 0 whether with the first derivative or the second derivative.
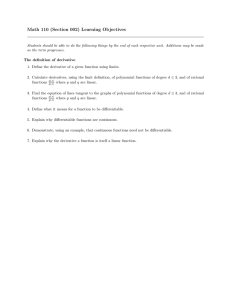
→ CONCAVITY AND CONVEXITY
A function f : D ⊆ R → R is said to be concave in D if for
all x 1 and x 2 in D it holds that f ((1 − α) x 1 + α x 2 ) ≥ (1 − α)
f (x 1 ) + α f (x 2 ), ∀α ∈ [0, 1] i.e. if the graph of the function
is above the segment that joins (x 1 , f (x 1 )) with (x 2 , f (x 2 )).
22
0292014
A function f :
and x 2 in D it
(x 2 ), ∀α ∈ [0,
segment that
D ⊆ R → R is said to be convex in D if for all x 1
holds that f ((1 − α) x 1 + α x 2 ) ≤ (1 − α) f (x 1 ) + α f
1] i.e. if the graph of the function is above the
joins (x1, f (x1)) with (x2, f (x2)).
Let f : (a,b) → R be differentiable in (a,b) then: f is convex in (a,b), the first derivative of the
function is increasing in (a,b); f is concave in (a,b) , the first derivative of the function is
decreasing in (a,b).
Furthermore, suppose that f is twice differentiable i n (a,b), then: f is convex in (a,b), the
second derivative of the function is greater than zero; f is concave in (a,b), the second
derivative is lower than zero.
→ THE DERIVATIVE OF THE INVERSE FUNCTION
Let f : [a, b] → R be differentiable in (a, b). Assume f is invertible and call f (− 1) : I f ⊆ R → R
the inverse function, where I f denotes the image of f. Then f (− 1) is differentiable in I f and
′
[𝒇(−𝟏) ] (𝒚) =
𝟏
𝒇′ (𝒇−𝟏 (𝒚))
for all y ∈ I f .
→ THE L’HOPITAL RULE
Let f : D ⊆ R → R and g : D ⊆ R → R be
continuous on D and let x 0 be a limit point
of D. Assume that f and g are both
differentiable in D/ {x 0 } and g (x 0 ) ≠ 0.
This result holds also for generic cases as
numbers that diverges to plus and/or
minus infinity or limits that results in
L=+∞.
→ THE TAYLOR’S FORMULA
Let f : [a, b] → R be a function n-times differentiable in a neighborhood of x 0 ∈ (a, b) and
assume that the n t h derivative is continuous in x 0 . Then f(x) can be written as:
Where the last term is called the reminder, while the other terms form what is called the
approximation of the function that goes faster to zero than (x − x 0 ) n . Remember that the
approximation alone is correct only to the first digit of decimals.
23
0292014
INTEGRALS
What does it mean computing an integral? Suppose you’re given a function g : D ⊑ R → R
and you want to compute a function F : R → R, whose property is f’(x) = g(x) for all x in the
domain, and which we call the antiderivative of G. However, there are lots of options to F
because there could be a constant that we cannot see in the derivative; more formally we
say that:
Let g : D ⊑ R → R be a function; if g(x) has an antiderivative F(x), then g(x) has infinitely
many derivatives given by F(x) + c; the whole family of antiderivatives is called integrals.
PROOF. Let g(x) be a function with an antiderivative F(x); consider the family of functions
F(x) + c, we compute the derivative of F(x) + c.
𝑫[𝑭(𝒙) + 𝑪] = 𝑭′ (𝒙) + 𝑫(𝑪) = 𝒈(𝒙)+0
Let g : D ⊑ R → R be a function; the indefinite integral of g(x) is the family of all the
antiderivatives of the function g(x) , which is called integrand. It is denoted by
∫ 𝑔(𝑥)𝑑(𝑥) = 𝐹(𝑥) + 𝑐
→ INTEGRALS OF ELEMENTARY FUNCTIONS
I.
∫ 𝑥 𝑎 𝑑𝑥
𝑤𝑖𝑡ℎ 𝑎 ≠ −1
𝑥 𝑎+1
∫ ⅇ 𝑎𝑥 𝑑𝑥
ⅇ 𝑎𝑥
𝑎
→
𝐷[
PROOF.
III.
∫ ⅇ 𝑥 𝑑𝑥 →
IV.
∫ 𝑥 𝑑𝑥
1
𝑥 𝑎+1
𝑎+1
+𝑐
∨𝑐 ∈𝑅
𝑥 𝑎+1
1
𝑎+1
𝐷 [ 𝑎+1 + 𝐶] = 𝐷 [ 𝑎+1 ] + 𝐷[𝐶] =
PROOF.
II.
→
ⅇ 𝑎𝑥
𝑎
+𝑐
𝑤𝑖𝑡ℎ 𝑎 = −1
(𝑎+1)⋅𝑥 𝑎
𝑎+1
= 𝑥𝑎
∀𝑐 ∈ ℝ
+ 𝐶] = 𝐷 [
ⅇ𝑥 + 𝐶
⋅ 𝐷[𝑥 𝑎+1 ] + 0 =
ⅇ 𝑎𝑥
]
𝑎
1
+ 𝐷[𝐶] = (𝑎) ⋅ 𝑎 ⋅ ⅇ 𝑎𝑥 + 0 = ⅇ 𝑎𝑥
∀𝐶 ∈ ℝ
→ 𝑙𝑛|𝑥| + 𝑐
∀𝑐 ∈ ℝ
24
0292014
→ INTEGRALS OF TRIGONOMETRIC FUNCTIONS
I.
II.
∫ 𝑐𝑜𝑠(𝑥) 𝑑𝑥 → 𝑠𝑖𝑛(𝑥) + 𝑐
∫ 𝑠𝑖𝑛(𝑥) 𝑑𝑥 → − 𝑐𝑜𝑠(𝑥) + 𝑐
∀𝑐 ∈ ℝ
∀𝑐 ∈ 𝑅
III.
∫
IV.
∫
1
𝑑𝑥
𝑥 2 +1
1
√1−𝑥 2
→ arctan(𝑥) + 𝑐
∀𝑐 ∈ ℝ
𝑑𝑥 → arcsin(𝑥) + 𝑐
∀𝑐 ∈ ℝ
→ REVERSING THE CHAIN RULE
I.
∫ 𝑔′(𝑥) ⋅ ⅇ 𝑔(𝑥) 𝑑𝑥
→
ⅇ𝒈(𝒙) + 𝒄
∀𝑐 ∈ ℝ
(𝑥)
PROOF. 𝐷[ⅇ 𝑔(𝑥) + 𝐶] = 𝐷[ⅇ 𝑔(𝑥) ] + 𝐷[𝑐] = 𝐷 [ⅇ 𝑔 ] + 0 = ⅇ 𝑔(𝑥) ⋅ 𝑔′ (𝑥)
II.
∫
𝑔′(𝑥)
𝑑𝑥
𝑔(𝑥)
→
𝒍𝒏|𝒈(𝒙)| + 𝒄
∀𝑐 ∈ ℝ
1
PROOF. (g(x)>0) 𝐷[𝑙𝑜𝑔(𝑔(𝑥)) + 𝐶] = 𝐷[𝑙𝑜𝑔(𝑔(𝑥))] + 𝐷[𝐶] = 𝐷[𝑙𝑜𝑔(𝑔(𝑥))] = +𝑔(𝑥) ⋅ 𝑔′ (𝑥) =
𝑔′ (𝑥)
𝑔(𝑥)
1
PROOF. (g(x)<0) 𝐷[𝑙𝑜𝑔(−𝑔(𝑥)) + 𝐶] = 𝐷[𝑙𝑜𝑔(−𝑔(𝑥))] + 𝐷[𝐶] = 𝐷[𝑙𝑜𝑔(−𝑔(𝑥))] = −𝑔(𝑥) ⋅
𝑔′ (𝑥)
𝑔(𝑥)
−𝑔′ (𝑥) =
III.
𝒂+𝟏
𝑎
∫ (𝑔(𝑥)) ⋅ 𝑔′ (𝑥) 𝑑𝑥
(𝒈(𝒙))
→
𝑎
PROOF. 𝐷 [
(𝑔(𝑥))
𝑎
+ 𝑐] = 𝐷 [
𝑎+1
+𝒄
𝒂+𝟏
IV.
∫ 𝑎 𝑥 𝑑𝑥 = ∫ ⅇ 𝑥⋅𝑙𝑜𝑔 𝑎 𝑑𝑥
V.
∫ 𝑔′ (𝑥) ⋅ 𝑠𝑖𝑛(𝑔(𝑥)) 𝑑𝑥
→
→
(𝑔(𝑥))
𝑎+1
∀𝑐 ∈ ℝ
𝑎
1
𝑎
] + 𝐷[𝑐] = 𝑎+1 ⋅ (𝑎 + 1) ⋅ (𝑔(𝑥)) ⋅ 𝑔′ (𝑥) = (𝑔(𝑥)) ⋅ 𝑔′ (𝑥)
ⅇ𝒙⋅𝒍𝒐𝒈 𝒂
𝒍𝒐𝒈 𝒂
+𝒄
− 𝒄𝒐𝒔(𝒈(𝒙)) + 𝒄
∀𝑐 ∈ ℝ
∀𝑐 ∈ ℝ
PROOF. 𝐷[− 𝑐𝑜𝑠(𝑔(𝑥))] = −𝐷[𝑐𝑜𝑠(𝑔(𝑥))] = −(− 𝑠𝑖𝑛(𝑔(𝑥))) ∗ 𝑔′ (𝑥) = 𝑠𝑖𝑛(𝑔(𝑥)) ∗ 𝑔′ (𝑥)
VI.
∫ 𝑔′ (𝑥) 𝑐𝑜𝑠(𝑔(𝑥)) 𝑑𝑥
VII.
∫
VIII.
∫
𝑔′ (𝑥)
2
1+(𝑔(𝑥))
𝑑𝑥
𝑔′ (𝑥)
2
𝑑𝑥
→
→
→
𝒔𝒊𝒏(𝒈(𝒙)) + 𝒄
𝒂𝒓𝒄𝒕𝒂𝒏(𝒈(𝒙)) + 𝒄
𝒂𝒓𝒄𝒔𝒊𝒏(𝒈(𝒙)) + 𝒄
∀𝑐 ∈ ℝ
∀𝑐 ∈ ℝ
∀𝑐 ∈ ℝ
√1−(𝑔(𝑥))
25
0292014
→ PROPERTIES OF LINEARITY
If f is a continuous function on [a,b], and k is a real constant, then
If f and g are continuous functions on the interval [a,b],
then
→ INTEGRATION BY SUBSTITUTION
Suppose we want to compute an integral where the dependence is complex, an easy way t o
do it is to apply the substitution method; pay attention to the variable though, as you
change the variable, you have to change also the one on the differentiation.
The substitution process is divided into five steps:
I.
II.
III.
IV.
V.
Identify a transformation, remembering that the new function has to be both
differentiable and invertible;
Differentiate the new function;
Substitute in the integral;
Compute the new integral;
Come back to the original variable x.
→ INTEGRATION BY PART
Integration by Parts is a special method of integration that is often useful when two
functions are multiplied together, but is also helpful in other ways. The rule is:
∫ 𝒇′ (𝒙) ⋅ 𝒈(𝒙) ⅆ𝒙 = 𝒇(𝒙) ⋅ 𝒈(𝒙) − ∫ 𝒈′ (𝒙) ⋅ 𝒇(𝒙) ⅆ𝒙
So we followed these steps:
I.
II.
III.
IV.
V.
Choose f(x) and g(x);
Differentiate f(x);
Integrate g(x);
Put f(x), f'(x) and ∫g(x) dx into the equation;
Simplify and solve.
26