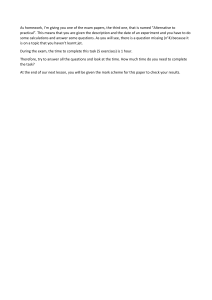
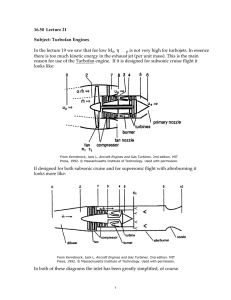
WATERJET THEORY AND PRACTICE Greg Cox Introduction Over the past fifty years, waterjet propulsion has matured into a viable and often desirable option for high-speed craft propulsion. They are most common in commercial applications rather than the recreational craft market (jet skis being the notable exception), and there would be few sectors of the commercial market where waterjets do not dominate when operating speeds are over 30 knots. Waterjets are nothing more than pumps that ingest water from beneath the vessel, impart momentum into it, and discharge it at high velocity behind the vessel to create thrust. Being a pump and not a propeller gives it useful characteristics – most notably the absence of any relationship between vessel speed and input power absorption. Once a waterjet is properly matched to its prime mover, there cannot be a vessel-speed-dependent overload of the engine as there is with a propeller. Provided a waterjet is not cavitating, it will load the engine to its rated power and speed whether the vessel is tied to the jetty or free running at 50 knots. All that changes is the efficiency with which it pumps water. That is an important feature for commercial vessels where loading and hull resistance change substantially during service. The other two features of notable importance are the lack of underwater protuberances that can be damaged (or can cause damage to swimmers) and the superior manoeuvrability they offer. As a propulsion device, the application of waterjets predates the screw propeller by at least 200 years. However, they have only found widespread applications in the post-war period when vessel construction techniques and lightweight engines made higher operating speeds possible. At slower speeds, less than about 25 knots, propellers are retained as the preferred propulsion option when propulsive efficiency is the primary design goal. This document is divided into four sections: common waterjet types (with examples of specialised types), basic waterjet theory, manoeuvring and control, and application and selection. Axial Flow Jet The axial flow jet is the most common waterjet type in smaller craft where viability is more sensitive to capital costs. They also conform best to wide operating profiles. The impeller casing is cylindrical (parallel) – the impeller has the same diameter as the intake. This simplifies the manufacture of the pump casing and removes the requirement for expensive bearing and support arrangements necessary to maintain blade tip clearances. The impeller hub diameter is used to influence the degree of axial flow/mixed flow characteristics (bigger hub diameter = higher pressure and less flow). Axial flow jets are sometimes referred to as mixed flow/axial build, though the extent of any mixed flow (axial plus radial) is limited by the cylindrical impeller casing form. Axial flow jets are configured to pump higher volumes of water at lower pressures. They are better suited to medium/high speeds (up to 40 knots) and where efficiency over a wide speed range is required. The higher flow/lower pressure characteristics increases their effectiveness at slower vessel speeds where cavitation becomes a problem. Conversely, at high speeds (above 40 knots) their efficiency tends to plateau – pumping high volumes of water at low pressure is not the best high-speed solution. blade exit angle – axial flow intake diameter discharge nozzle stator (fixed) impeller (rotating) Mixed Flow Jet In a mixed flow jet, the shape of the impeller hub and impeller casing gives the flow over the impeller a mix of radial and axial components. The impeller casing is spherical and has a larger diameter than the intake. To limit the tip speed of the larger diameter impeller, the shaft speed must be slower than an axial flow jet with the same intake diameter. steering and reverse mechanisms The blade exit angle is used to indicate the degree of radial flow, which in turn influences the pressure head developed. Mixed flow jets are configured to pump lower volumes of water at higher pressures. They are better suited to high speeds (at least above 30 knots) and where efficiency over a wide speed range is less important. Their overall efficiency keeps increasing at very high speed, and their effectiveness at speeds over 50 knots is limited only by flow separation in the intake. Their bollard pull is lower, and mixed flow jets can be sensitive to cavitation at slower speeds (especially during acceleration). There are often limits to how much power they can effectively absorb at slower speeds before thrust drops off or breaks down completely. Conversely, at very high speeds, they can operate at very high power densities [power/(inlet dia.)2]. pump blade exit angle – a mix of radial and axial flow intake diameter discharge nozzle stator (fixed) impeller (rotating) View Inside a Waterjet (axial flow, 356 mm diameter) Impeller (looking aft) Stator (looking forward) Impeller (left) The number of blades depends on the design and the power relative to jet size. In general, older models and those with low input power may have fewer blades (as few as three). Newer models tend to have five or six blades. cast aluminium intake body stainless steel liner to impeller casing shaft (exposed) impeller (six blades in this example) cavitation burns caused by leading edge damage The tip clearance between the impeller and casing is critical to performance, but far more so with mixed flow impellers that generate higher pressures. Tip clearance is easier to maintain with the cylindrical shape of axial flow impeller casings. In a mixed flow jet with spherical casing, the impeller must be constrained both radially and axially to maintain clearances, making manufacturing more expensive. Stator (right) The stator blades are usually of a standard design for each model and therefore are a compromise in terms of chord length and camber. They are designed to recover rotational energy in the flow coming off the impeller. This provides about 1015% of the total thrust. Note the areas of flow separation where the coating has been removed (blunt trailing edges and low-pressure root area of the blades). Material erosion is not evident (but can be if poorly configured). Smaller jets utilising cast aluminium components are a compromise between manufacturing cost, flow efficiency and material erosion. discharge nozzle curved stator blades (cast aluminium) Centrifugal Flow Jet In a centrifugal pump, the inlet and discharge are at right angles to each other. The inflow is axial and the discharge is radial. The impeller may be shrouded or unshrouded (open). Shrouded impellers retain the pressure generated but are more complicated to manufacture. Open impellers are simple, but they rely on the pump casing to form one or both shrouds and therefore suffer pressure loss at the gap between the impeller blades and the casing. The flow discharges into a volute, which is a spiral chamber of increasing cross-sectional area towards the discharge. As the impeller rotates through a single revolution, more and more water accumulates off the impeller during the cycle, which is accommodated by the increasing cross-sectional area of the volute. The volute is usually designed to maintain constant flow velocity. Conversion of velocity into increased pressure requires the addition of a diffuser in the form of fixed blades or a modified volute design (not discussed here). Centrifugal pumps are designed to pump low volumes at high pressures. They are rarely used for waterjets because of their lower efficiency (except at very high speeds), as well as their susceptibility to cavitation in off-design conditions. shrouded centrifugal discharge unshrouded (open) centrifugal volute (spiral collector) inlet impeller mixed flow (highlytapered hub) axial flow Centrifugal Jet Examples Single gas turbine Two centrifugal pumps with backto-back impellers The most notable examples are those developed by Boeing in the 1960s and 1970s. Early variants of hydrofoil patrol craft utilised propellers. They suffered from mechanical complexity (it was often a requirement to have retractable foils and propulsion equipment), as well as aggressive propeller cavitation. Boeing developed a waterjet design using pumps designed and built by Rocketdyne (the manufacturer of the F1 engines for the Saturn V rockets). The first was Tucumcari (shown right), which was powered by a single gas turbine driving two centrifugal pumps. It also had transomhung rudders for off-foil steering. The design was deemed successful in itself, but the concept proved expensive and few were built (Italian Sparviero Class and Japanese 1-Go Class). Boeing developed the concept into the Boeing Jet Foil - a passenger ferry capable of carrying about 240 passengers at around 45 knots (varies between vessels). The design was later built under licence in Japan and China. Most are still operating, mostly in Hong Kong and Japan, and at least one unit is listed as under construction in Japan in 2020. The design has a single intake on the rear foil, two centrifugal pumps and two gas turbines. Although expensive to operate, they are unsurpassed in terms of passenger comfort and seakeeping in open waters. Boeing Jet Foil design Tucumcari patrol vessel: machinery layout (left) and profile underway (below). Two discharge nozzles under the hull Pump Jet Modern submarines are turning more and more towards pump jets as a means of propulsion. They are axial flow pumps by design and should not be confused with a shrouded propeller. Submarine pump jet example on the B-871 Alrosa, a Russian Kilo Class diesel electric submarine. Their advantage is mostly noise suppression due to their enclosed design. Although they are less efficient than a propeller at normal operating speeds, stealth is a more valuable attribute than submerged speed. A submarine fitted with a pump jet can operate at a higher silent speed than with a propeller. Efficiency is increased by their ingestion of the boundary layer, with thrust being a function of the difference between the inlet and discharge velocities. The slower moving water in the boundary layer reduces the average inlet velocity. This helps to overcome the increased thrust deduction they experience. The potential for propulsor damage is reduced, though their weight and location aft creates extra challenges for designers. The units are usually fixed and so external steering is still required. Reverse thrust is also very small. 7-blade stator 11-blade shrouded impeller Basic Waterjet Equations As with propellers, waterjets create thrust by imparting momentum onto a mass of water. The principal equations define the basic thrust generated, the propulsive efficiency and the pump characteristics. These principal equations ignore the effect of the slower moving water in the hull’s boundary layer ahead of the jet, which acts to reduce the inlet velocity thereby increasing the thrust. The inlet velocity is taken here to be the ship speed. Unlike propellers, where their flow effects on the hull can be derived experimentally (thrust deduction in particular), waterjets are integrated into the hull and so it is impossible to do the same. Nett thrust can only be determined through a combination of analytical, experimental and empirical techniques. The basic (gross) thrust equation is: 𝑇 = 𝑚 𝑉𝑗 − 𝑉𝑠 The jet efficiency (QPC, ignoring wake and thrust deduction factors) is: 𝜂𝑗𝑒𝑡 = 𝜂𝑝𝑢𝑚𝑝 × 2𝑉𝑠 𝑉𝑗 − 𝑉𝑠 𝑉𝑗2 − 𝑉𝑠2 1 − 𝜂𝑖𝑛𝑡𝑎𝑘𝑒 The intake efficiency must be estimated. Pump efficiency can be estimated from tabulated data based on certain variables and pump characteristics. Operationally, there are relationships between shaft speed and flow rate (Q), pressure head (H) and input power (P) that are consistent for all pumps: 𝑄 ∝ 𝑛𝑠 𝐻 ∝ 𝑛𝑠 2 𝑃 ∝ 𝑛𝑠 3 These are important, especially the power-to-shaft-speed relationship that is often used to calculate input power at cruising speeds as well as back-calculate thrust from trials results. The relationship between input power and shaft speed for all pumps is a cubic, which is the same as slow speed propellers (up to about 20 knots). Nomenclature H Pressure head (m) ṁ Mass flow rate (kg/s) ns Shaft speed (s-1) P Input shaft power (W) Q Volumetric flow rate (m3/s) T Thrust (N) Vj Velocity at the jet discharge (m/s) Vs Velocity at the inlet 𝜂𝑖𝑛𝑡𝑎𝑘𝑒 Intake duct efficiency 𝜂𝑗𝑒𝑡 Jet efficiency (QPC) 𝜂𝑝𝑢𝑚𝑝 Pump efficiency Pump Efficiency and Specific Speed mixed axial Pump efficiency is determined by the specific speed, flow rate and total pressure head developed. There are different versions of the specific speed equation, and many are dimensional and specific to the units being used. The dimensionless version is: 𝑁𝑠 = Pump efficiency based on specific speed (in dimensional form, imperial units) and flow rate. Axial flow jets fall towards a reduced pump efficiency compared to mixed flow jets, but this is somewhat offset by their increased flow rate. 𝑛𝑠𝑐 𝑄 𝑔𝐻 3 4 typical waterjet range Where 𝑁𝑠 is the specific speed, 𝑛𝑠𝑐 is the rotational speed in rad/s, 𝑄 is the volumetric flow rate in m3/s and 𝐻 is the total pressure head in m. Larger pumps (and therefore larger waterjets) can achieve higher efficiencies. Efficiency losses are a function of Reynolds number. For a given specific speed, it is almost impossible to manipulate the pump design to achieve efficiencies higher than shown. Claims by manufacturers of significant improvements in waterjet efficiency are usually overstated. mixed flow unshrouded Axial flow jets have higher specific speeds (higher shaft speeds and flow rates; lower pressures). The impeller design of an axial flow jet can be manipulated to give the pump more mixed flow characteristics, sometimes referred to as mixed flow, axial build. shrouded impellers Diagram showing where different impeller types fall on specific speed scales (metric and US units). A mixed flow waterjet impeller is unshrouded, which places it between a shrouded mixed flow impeller and an axial flow impeller. The blade discharge angles are shown and give an indication of the degree of axial/mixed/radial flow. Equating Axial and Mixed Flow Jets 90 1.28 1.26 1.24 Nett Thrust (kN) At higher speeds, axial flow jets must be made increasingly larger than the mixed flow jets. That increases system weight, and the manufacturing cost advantage of the axial flow pump disappears. Their limited ability to generate pressure cannot be offset sufficiently by increasing the mass flow at high speeds. 85 80 1.22 1.20 75 1.18 1.16 Different jet configurations are sometimes compared according to their discharge nozzle diameters, with equivalent nozzle diameters said to produce equivalent thrust. That is useful as an approximation but is not absolute. It ignores differences in flow rates and therefore efflux velocities. 70 Generally, the thrust cross-over between equivalent mixed and axial models occurs at around 30 knots, but can vary depending on how heavily loaded the jets are (power relative to intake area). 65 1.14 1.12 1.10 24 Intake details 26 28 30 32 34 Speed (knots) 36 38 40 Sample thrust comparison between a 630 mm mixed flow jet and two axial flow models. Based on nozzle area, the 630 mm mixed flow is equivalent to the 710 mm axial flow, but this would only be for speeds <28 kn. Above this speed, the axial flow units must be relatively larger to generate higher mass flows to compensate for their lower comparative pump pressure. Most large vessels would operate at speeds less than 30 knots, where the relative size benefit of axial flow jets is evident. The “intake diameter ratio” is an approximation of the ratio between equivalent axial/mixed jet intakes at different vessel speeds necessary to generate the same thrust, but it is dependent on power and speed. The tapering off of mixed flow jet thrust at reducing speeds is evident and eventually ends prematurely in a cavitating condition. Axial flow jets do as well, but at lower speeds. Intake Diameter Ratio Jets are compared according to their intake diameters (measured ahead of the pump), not their impeller diameters. Equivalent mixed and axial flow models do not have the same intake diameter. To compete with axial flow jets on efficiency and thrust at slower speeds, mixed flow jets must be relatively larger than they otherwise might be at higher speeds. Their higher manufacturing costs and susceptibility to cavitation make them a less attractive proposition at operating speeds below about 25 knots when their higher pressure/lower flow characteristics are not effective. 1.30 Thrust Deduction Fraction A waterjet is an enclosed system, so it interacts with the hull more than a propeller. At certain speeds it may appear to produce more or less overall thrust than the pump and thrust equations would suggest. This is due to thrust deduction. Although the same mathematical definition is used for waterjets and propellers (as a change in thrust), it has several components of which some are thrust changes and some are resistance changes. The thrust deduction fraction can be positive (indicating increased resistance/reduced thrust) and negative (indicating reduced resistance/increased thrust). Envelope of thrust deduction fraction against length Froude number, collating several waterjet experiments at MARIN (van Terwisga, 1996). At slow speeds, before the transom unwets and the jet is discharging underwater, the efflux causes a rearward suction on the hull, and there is a slight pressure impediment to the jet efflux discharging underwater. These create a positive thrust deduction fraction. Depending on the shape of the hull and the amount of immersed transom area relative to the midship area, the thrust deduction fraction may be +0.25. As speed increases the transom begins to unwet. This normally happens around 𝐹𝑟𝐿 = ~0.5. The jet efflux discharges into air and the rearward suction on the transom disappears. There is also an effect at the intake and on the hull forward of the intake, but these can only be quantified computationally. At speeds between ~0.5 < 𝐹𝑟𝐿 < ~1.2, the jet creates a bow-down trimming moment (pure moment) due to the two changes of water flow (first up into the intake then horizontal again). This improves the vessel running trim and, along with flow/pressure variations in the intake, generates a negative thrust deduction (an apparent thrust increase which is mostly a resistance decrease). However, at high speeds the bow-down moment still exists and the running trim becomes too flat; the thrust deduction becomes positive again. Thrust deduction fractions of 0.05 are commonly applied, though often over a wider speed range than they should be to give the impression of superior waterjet performance. Some manufacturers do not apply negative thrust deduction fractions at all. When assessing data provided by a waterjet supplier, ask for assumptions about thrust deduction to be stated clearly. The effect is approximately the same for all brands. Be careful not to double dip on changes to resistance due to improvements to running trim. If trim control is used (interceptors or trim tabs), their effectiveness and therefore the benefits they bring will be reduced by the bow-down trimming moment of the waterjets. Do not account for waterjet thrust deduction and trim control devices in isolation from each other or the benefits will be over-estimated. Results of MARIN tests of the Hamilton test boat model, with two independent tests conducted at the same vessel condition (van Terwisga, 1996). The Hamilton Jet test boat was a small (7.27 m LOA) planing hull with a single engine and jet. Van Terwisga, T. (1996) Waterjet-Hull Interaction. PhD Thesis, Delft Technical University. Wake Fraction Using the generic thrust equation 𝑇 = 𝑚 𝑉𝑗 − 𝑉𝑠 , thrust can be increased by reducing 𝑉𝑠 , which is assumed to be the flow speed into the jet. In fact, jets ingest water that wholly or partially encompasses the hull’s boundary layer, such that the average inflow velocity into the pump is less than the vessel speed. Depending on the jet type, hull type, vessel speed, input power and intake design, the wake fraction can be up to 0.1 to 0.15, meaning the inflow speed can be reduced by more than 10-15%. To estimate wake fraction properly, the hull’s boundary layer profile and thickness must be estimated. This will vary with hull size, type and vessel speed, and there isn’t an exact answer unless a hull wake survey is done. Generally, minor variations in boundary layer profiles will only produce minor variations in the calculated thrust. Certain vessels and jet types benefit more than others: • • • • • • Small craft have thinner boundary layers and may only experience a small thrust increase of maybe 2-3%. Larger vessels experience the highest gains; The boundary layer thickness of planing craft can be suppressed by around 30% due to the planing pressure generated, and that reduces the wake fraction. Catamarans don’t really plane and so don’t experience this; A hull’s boundary layer is often thicker at the centre than it is outboard, though more so for V-shaped sections. Vessels with single jets per hull may have higher wake fractions than multi-jet vessels, but this is difficult to account for; Mixed flow jets experience slightly higher wake fractions than axial flow jets due to the slightly lower volumes ingested; Jets with lower power density (power/dia2) ingest less water and therefore benefit more than heavily loaded jets; For the same input power, a larger jet model usually has a slightly lower wake fraction than a smaller jet model. Intake condition 1: capture area wholly within the boundary layer The effect of wake fraction on thrust can only be assessed fully by the jet manufacturer. Optimistic assumptions about the boundary layer and the shape of the ingested streamtube can lead to over-optimistic thrust estimates, and designers need to be aware of this when assessing proposals. Intake condition 2: capture area extends outside the boundary layer Wake Fraction (continued) J start of jet ramp hull bottom boundary layer δ b 1.5J Capture area within boundary layer (vol. flow rate Q1) Capture area outside boundary layer (vol. flow rate Q2) The capture area of the ingested streamtube is approximated by an ellipse, with an assumed width equal to 1.5 times the jet intake diameter (J). The actual width can vary. The reference point for assessing the boundary layer is taken as one jet diameter ahead of the ramp. The correct capture area occurs when the total volumetric flow rate into the pump equals the volumetric flow rate in the reference capture area (Q 1+Q2). Note – not to scale. J start of jet ramp hull bottom boundary layer δ b 1.3J Capture area within boundary layer (vol. flow rate Q1) Capture area outside boundary layer (vol. flow rate Q2) The analytical evaluation of an elliptical capture area is complicated. As an approximation, the ITTC recommends a simplified rectangular capture area with width equal to 1.3 times the jet intake diameter. It can be shown that this simplification results in a wake-corrected thrust difference of less than 1%. Inlet flow at six different speeds (top to bottom - 19, 24, 28, 34, 37 and 40 knots) for a 298 m vessel with four 3.05 m diameter axial flow jets. (Takai 2010, Figure 5-30). Note the flow is ingested around the turn of bilge, distorting the elliptical cross-sections of the outboard streamtubes. Takai, T. (2010). Simulation based design for high speed sea lift with waterjets by high fidelity urans approach. MS (Master of Science) thesis, University of Iowa. Manoeuvring One of the most important features of vessels fitted with waterjets is their inherent manoeuvrability. That has come to the forefront in applications such as offshore vessels where dynamic positioning is a requirement. Steering is achieved by deflecting the entire jet efflux rather than using a control surface such as a rudder. The effect is so immediate and direct that larger high-speed vessels often lock their normal steering system in the cruise condition and use other lift devices such as small interceptors mounted on the hull sides to provide coursekeeping. In small craft, application of full steering at speed can cause a turn so aggressive as to cause it to spin on its axis. Reverse thrust is achieved by deflecting the jet efflux forward. The two most common reverse mechanisms are the split bucket and the clam shell bucket. If the reverse bucket is partially applied to the jet efflux, a dynamic neutral condition forms where part of the jet efflux gives forward thrust and is balanced by partial reverse thrust. During this condition, full steering is still available and can be used to generate a turning moment on the hull at zero forward speed. Dynamic neutral is also used in small craft where direct coupling (without gearbox or clutch) is possible between engine and jet. Most jets can be supplied with electronic control systems allowing steering and manoeuvring by joystick or coursekeeping/stationkeeping by GPS. Tight manoeuvres are also possible with non electronic (manual/hydraulic) controls, but with increased reliance on the skill of the helmsman. When used for dynamic positioning, waterjets can usually conform to DP1 requirements without bow thrusters. For DP2, which requires system redundancy, bow thrusters are required. BUCKET UP – full ahead thrust Turning couple comparison between propellers (top) and jets with independent steering and bucket controls (bottom). BUCKET MID – split thrust ahead and astern ZERO NETT THRUST BUCKET DOWN – full astern thrust Three conditions of reverse bucket actuation, showing full ahead, dynamic neutral and full astern. Immediate actuation of the reverse bucket to the fully down condition leads to a crash stop. Schematic of the thrust envelope of a multiple waterjet vessel during manoeuvring. The length of the vectors is an indication of the thrust available. Note that sideways thrust is the most limiting case. Overlaying an envelope of wind and current forces acting on the hull will indicate critical or non-compliant operating conditions. Steering and Reverse – split bucket steering tiller inside transom The split bucket arrangement uses fully independent steering and reverse mechanisms and is regarded as having the highest degree of manoeuvring control and stopping capacity. Steering is configured using a steering nozzle that sits in a bowl behind the discharge nozzle. The steering nozzle moves side-to-side and deflects the efflux. The deflection of the circular efflux by a circular steering nozzle gives very direct and immediate steering, so much so that it can often be too sensitive at slow speeds. Reverse is achieved using a bucket that drops over the steering nozzle, splits the water into two streams, and deflects it forward. There are two advantages to this. Firstly, water is deflected away from the waterjet intake, regardless of how steering is applied, reducing the risk of recirculation. Secondly, using the steering at the same times gives both vessel speed and steering control, such that high steering forces are available at zero or slow speeds. Up to around 60% of ahead thrust is available in reverse. Diagrams showing how the flow is split in the ahead and port/stbd steering positions with the bucket down. With the bucket partially raised to give dynamic neutral (balanced thrust ahead and astern), zero vessel speed steering capacity can be maintained with minor bucket adjustment. the steering nozzle (separate to the pump discharge nozzle) deflects the flow Almost all jet models using split reverse systems are fitted so they sit on the vessel’s deadrise rather than orientated in horizontal/vertical planes. All reverse thrust is directed under the hull at all steering angles. There are two minor issues with split bucket systems. Firstly, in reverse they steer back-to-front, which is a feature the helmsman must learn to adjust to. Larger jets with electronic controls can be programmed to steer in the usual manner. Secondly, in the very large jet models, the buckets become physically very large and very wide, which can become a problem in multiple jet installations on narrow transoms. the split reverse bucket drops partially or wholly over the steering nozzle to achieve reverse thrust. Steering (reverse bucket removed) Steering and Reverse – clam shell Very large waterjets use a clam shell steering and reverse arrangement because of its compactness. The combined steering and reverse unit sits over the discharge nozzle. Steering is achieved by swinging the unit port and starboard. Reverse is achieved by a series of levers and flaps that open within the unit and deflect the jet efflux forward. Note the reliance on external hydraulics that are exposed to corrosion and damage. The sole advantage of the clam shell arrangement is its compactness. There are numerous disadvantages though. Steering can be insensitive at small angles, caused by discharging a round jet efflux into a square steering box. The steep discharge angle of the reverse flow, necessary to clear the transom on hulls with deadrise, reduces its effectiveness. The reverse flow is directed forward as a single stream and this can cause recirculation in the jet intake as well as aeration of the inflow, leading to premature cavitation and thrust breakdown if the manoeuvring power is too high. This can be mitigated somewhat by “toe-ing” the jets (turning one to port and one to starboard) to direct the reverse flows away from the intakes, but this further reduces the reverse thrust. It also requires independent control systems. Combined steering and reverse unit At best, clam shell units are adequate but far from ideal. All manufacturers have moved towards split bucket systems where possible. The reverse unit swings side-to-side and deflects the jet efflux for steering. Early Austal Ships passenger catamaran in Hong Kong fitted with Kamewa S series mixed flow jets with clam shell steering/reverse. Aerated water is being deflected back into the jet intake, increasing the risk of cavitation initiation and thrust breakdown. Actuation of reverse thrust with a clam shell arrangement, taken from a Kamewa patent application. Actuation of the reverse cylinder (item 24) causes one flap to lift and another to drop, deflecting the jet efflux forward and creating reverse thrust. Note the steep downward angle of the reverse flow – necessary to clear the transom if steering is also applied (jets such as these are orientated vertically and do not follow the hull deadrise as do split bucket units). 25 Waterjet Sizing Guidelines Mixed flow jets are best for increasing efficiency at 30+ knots, but usually with a cost premium. Ferries, which are more likely to operate at fixed speeds, may benefit more from mixed flow jets if the operating speed is high enough. Thrust (kN) Axial flow jets are best for good all-round performance in 20-40 knot range. Work and patrol craft that may have a wide speed and load profile benefit more from axial flow jets. 20 15 10 As a general rule-of-thumb, axial flow jets are around 20-25% larger in intake diameter than mixed flow jets for equivalent thrust at 30 knots. Below 30 knots, the percentage reduces; above 30 knots, it increases. 5 Select jets according to the cruise speed, not the maximum speed. That is particularly so for smaller planing craft which may experience a resistance hump at the cruising condition, giving a decrease in speed but a disproportionately smaller decrease in resistance. As with propellers, jet size is inversely proportional to speed, such that slow speeds require larger jets and high speeds work well with smaller jets. 0 Manufacturers often publish jet selection guides based on the power limit for each model. Don’t use the manufacturer power limits to size jets. It only shows the upper limit on input power and is not a guide to the correct jet size for all speeds. The only time the upper power limit can be used is at very high speeds (usually at least 40 knots, if not more). The power limit may be in place due to shaft torque limits or limits on how much power can be absorbed by the impeller. An impeller’s power absorption can be increased by increasing the chord length of the blades (in effect, the blade area ratio), but there are limits to hub lengths that can be accommodated within the pump casing. Also, there are upper limits on shaft rotational speed to limit impeller tip speed. Be wary of cavitation margins and allow for weight errors and sea margins. Different manufacturers show cavitation margins differently. Axial flow jet limits are usually shown as a minimum speed line that truncates the thrust curves. They do not necessarily indicate the onset of cavitation, but they represent the limit of the numerical relationship between thrust and power. Beyond this, the growth in thrust may begin to fall away due to increased impeller loading. Mixed flow jets usually show operating zones, with limits on the annual hours in each zone. The restricted thrust/speed zones (zones 2 and 3) should only be utilised for acceleration or manoeuvring. It is always advisable to keep a vessel’s resistance curve well away from zones of increasing pump stress and cavitation – changes to vessel weight and resistance can make a marginal jet installation unviable. Make proper comparisons when comparing competing models. If the jet manufacturers supply resistance estimates, which is often the case, compare these as well as the thrust offered. Resistance may be underestimated slightly and thrust may be overestimated slightly for the purpose of sales, often knowing that many high-speed vessels are built overweight and the blame for a few missing knots can be shifted to the builder. 360 mm mixed 10 15 20 25 30 35 40 45 50 Speed (knots) 35 520 mm axial 432 mm axial 30 356 mm axial 25 Thrust (kN) Above about 40 knots, the smallest jet that will accept the input power will usually be the best option. The thrust of different jet models tends to converge at 40+ knots (refer to diagrams). At very high speeds it can actually be detrimental to use a larger jet. Not only are larger jets heavier and more expensive, developing thrust by pumping larger volumes of water is not efficient at very high vessel speeds. 400 mm mixed 20 15 10 5 0 10 15 20 25 30 35 40 45 50 Speed (knots) Comparison between different models of mixed flow and axial flow jets with an assumed 560 skW input power. Mixed flow (upper): dashed lines indicate zone 2 (acceleration only); solid lines indicate zone 1 (continuous operation). Note how thrust growth decreases below about 30-35 kn. Note how at very high speeds the larger jet produces slightly less thrust. Axial flow (lower): the 356 mm diameter axial flow jet is shown for comparison, but is comparatively much smaller than the 360 mm mixed flow jet. The left-hand end of each axial flow jet curve marks the minimum speed line (limit of continuous operation at 560 skW). Impeller Curves The waterjet manufacturer will match the engine, impeller and discharge nozzle size – not the designer. Impeller pitches range from coarse to fine. Generally, the coarsest pitch is preferred, and when a reduction gearbox is fitted the ratio should be selected for the coarsest impeller and slowest shaft speed. Coarse impellers pump more water, have the best efficiency, and the highest cavitation margin. The difference between the efficiencies of coarse and fine impellers is not great, maybe 3-5%, and the selection of a finer impeller does not mean poor performance. The size of the discharge nozzle varies with pump parameters and selected impeller. A coarse impeller pumping more water would usually have the largest nozzle diameter, which improves efficiency. At very high speeds this may not always be the case though. When an engine fails to reach its rated rpm at trials, the nozzle size can be adjusted to load or unload the pump as an alternative to re-pitching the impeller. example shaft speed target range The maximum shaft power is limited by shaft torque or the ability of the impeller to absorb the power (higher power means longer blades that might not be accommodated on the hub). Maximum rpm is limited by impeller tip speed, which is usually about 45 m/s (but varies slightly between brands). This is similar to the recommended propeller tip speed limit of 50 m/s. Smaller waterjets in very high speed craft can have higher tip speeds; very large waterjets have slower tip speeds. Example of impeller curves for a 432mm diameter axial flow jet. Manufacturers may not produce these generic curves for jets larger than about 450 mm. The power absorption of an impeller varies with the cube of the shaft speed. In the example with 520 skW input power to the jet, the shaft speed should fall within the range of 1,550-1,930 rpm, with a preference for the coarsest impeller and slowest shaft speed. If a reduction gearbox is fitted, a ratio should be selected to give the slowest shaft speed within the target range. The jet manufacturer can adjust the impeller pitch slightly if the calculated shaft speed falls between two impeller curves. The discharge nozzle can also be adjusted to vary the shaft speed slightly. There may also be impeller options outside of those shown on the curves, though usually not more than one step beyond. Note also the stated input power and shaft speed limits for this model. Jet Thrust Curves For small jets (up to about 450mm), manufacturers may produce generic thrust curves that will often be raw thrust (without allowance for thrust deduction fraction or wake fraction). It is becoming more common for specific thrust curves to be generated for all projects regardless of vessel size. For larger jets, curves are always customised for the project. If thrust curves are presented, they show how thrust changes with speed for constant input power (either shaft or brake power). They will also show either zones of allowable operation (common for mixed flow jets) or minimum speed lines above which continuous operation is not recommended (axial flow jets). If the vessel resistance is known, it can be overlaid onto the thrust curves to determine the maximum speed at the rated power or any cruising speed at an intermediate input power. The cubic relationship between power and engine rpm allows the cruise rpm to be calculated from the cruise power (some engines define their service rating in terms of allowable cruise rpm). It will be noted that the thrust curves for mixed flow jets begin to turn downwards below about 30 knots. This marks the point where their higher pressure/lower flow characteristics start to become inefficient. The thrust curves for axial flow jets do the same, but only above their minimum speed line. It will also be noted that at slower speeds the allowable power density for a mixed flow jet falls quickly. In the example curves shown and at a speed of 20 knots, the axial flow jet can accept 66% of its maximum power (400 skW out of a maximum of 600 skW), yet the mixed flow can accept only about 52% of its maximum capacity (420 bkW out of a maximum of 800 bkW). Note that these jet examples are not considered to be equivalent – the mixed flow example being effectively larger. Even so, the larger capacity mixed flow jet still has poorer cavitation margins than the smaller axial flow jet at moderate speeds. The shape of the thrust curves can be influenced with different impeller and nozzle combinations; the outcome can be skewed towards better bollard pull or better high-speed thrust, but not both. Axial flow jets used in a bollard pull condition can expect to produce continuously around 55 N of thrust per kilowatt of shaft power. Specialised towing jets may produce at least 50% higher thrust. AXIAL FLOW Examples of water jet thrust curves with contours of constant power (shaft or brake power, as noted). The jets are not considered to be equivalent. Upper: 356 mm axial flow jet Lower: 360 mm mixed flow jet A characteristic of mixed flow jets are their capacity for higher power density (P/D2), provided vessel speeds are high (>35 kn). Note how the gaps between the constant power contours reduce as power increases (power density increases) and the jets become more heavily loaded. That has a direct effect on propulsive efficiency, which is why jet sizing and power density must be balanced to achieve the best compromise outcome between cost, weight and performance. Intermittent operation only; thrust breakdown possible due to cavitation MIXED FLOW Overlaying Resistance Curves use of trim control to temper resistance hump Resistance curves can be overlaid directly onto the thrust curves. The resistance should include all allowances, noting that some resistance software packages have a tendency to under-estimate resistance. It is always recommended that margins are built into the resistance curves. The most significant causes of poor performance are incorrect weight estimation at the time of design and poor weight control during construction. Margins for weight growth during construction and operation must always be allowed for, either in the resistance curves themselves or in the speed expectation at the contract condition. It is recommended that a power margin of up to 10% is applied when defining the contract speed condition. For instance, the design target for a contract condition of 30 kn at 100% rated power should be 30 kn at 90% power. That will ensure weight growth and resistance prediction uncertainties are sufficiently covered. Vessels that just reach their contract conditions at trials almost certainly will never be able to replicate them once in service. Vessels do not get lighter, hull surfaces do not become smoother, and engines do not output more power with age. The resistance of catamaran vessels is usually devoid of the humps experienced by planing craft, and their performance across a wide speed range is more predictable and consistent. Planing monohulls, especially those heavy for their available bottom planing area, can exhibit pre-planing resistance humps that may lead to poor performance or, in the worst case, thrust breakdown due to cavitation that does not allow the maximum speed to be achieved (upper right figure). Hump resistance can be tempered with trim control devices. When overlaying resistance curves, ensure the resistance curve (with margin for weight growth and uncertainty) remains well below the minimum speed line for an axial flow jet or within the continuous zone for a mixed flow jet. A planing craft with a substantial resistance hump can experience widely varying speeds if the back of the resistance hump runs approximately parallel with the thrust line at constant input power (lower right figure). This speed instability can be removed by controlling the dynamic trim. Dynamic trim control using adjustable trim tabs or interceptors may improve performance, but at a capital cost and maintenance penalty. Fixed trim control devices such as fixed trim tabs or fixed interceptors will temper the resistance hump, but they may over-correct at higher speeds and cause the vessel to run too flat. Provided the maximum speed is not too high, the over-correction may be an acceptable compromise given their low installation cost. Dynamic trim control using changes in static trim (moving the LCG) is usually the least efficient means of controlling dynamic trim. Moving weights such as engines and tanks enough to initiate control of dynamic trim angles can impact upon vessel layout and functionality. That is because large static trimming moments are often required, and nudging engines and batteries one frame further forward often has little effect. region of speed instability Application Summary Jets can be made to work at all speeds. They are useful at slow speeds where shallow draft, high manoeuvrability and even good bollard pull are required. They work most efficiently above 25 knots and above a length Froude number of 0.5 (unwetted transom). Axial flow jets are better over a wide speed range but their efficiency begins to plateau above 40 knots. Mixed flow jets are susceptible to cavitation and have reduced efficiency at lower speeds but are efficient above 30 knots. Jets should be sized for the cruise speed condition, not the maximum speed condition. Optimising the installation for the maximum speed is pointless if the vessel spends only 5% of its time operating at full power. For that reason, axial flow jets are more common on vessels with a wide range of operational speeds, such as patrol craft, or a wide range operational displacements, such as crew boats. Mixed flow jets are more common on vessels that operate continuously at speeds over 30 knots, such as high-speed passenger ferries. Some manufacturers manipulate their data in subtle ways, including design efficiencies. When asked to supply resistance, jet manufacturers may manipulate that subtly as well. Their predictions come with a caveat of uncertainty that passes the responsibility back to the designer/builder. Make sure you compare like-with-like and understand what the manufacturers are proposing. Jets can be expensive. Some manufacturers try to overcome this by offering the smallest jet that will work, but without margin or allowance for performance deterioration over time. Don’t cut corners. Do not use published input power limits as a guide to the suitability of particular models. They are only limiting parameters and only indicate suitability at very high speeds. Although jets can be more expensive than propellers, they come as a complete package, including controls. That is useful when third-party certification (Class) is required, as all the equipment comes certified in one package. In contrast, a propeller installation may have equipment from dozens of suppliers that must be integrated and certified separately to make it work. The cost of this and the risk of incompatibility and responsibility are often forgotten at the project estimation stage. Propulsion summary table Speed (kn) 5 10 Axial flow jet (1) Mixed flow jet (4) Shaft drive propeller (1) (2) (3) (4) (5) (6) 15 20 25 (2) 35 40 45 best good (3) best 30 50+ good best good good (5) (6) Axial flow will work in this range with lower power density but with reduced efficiency. Jet size must be increased to (partly but not fully) offset reduced efficiency and avoid cavitation limits. Axial flow will work in this range with reduced efficiency, which can be (mostly but not fully) offset by increasing model size. Mixed flow will work in this range by reducing power density and increasing model size to offset reduced efficiency and to avoid cavitation. Except in specific circumstances, mixed flow jets are not cost-effective in this speed range due to reduced efficiency and susceptibility to cavitation. Cavitation becomes difficult to avoid, drag of underwater gear becomes significant, and shaft angle becomes critical. Except with specialised propellers (trans-cavitating) or specialised propulsion arrangements (surface drives), this speed range is difficult or unworkable with standard shaft drive propellers.