360
Polymers: Chemistry and Physics of Modern Materials
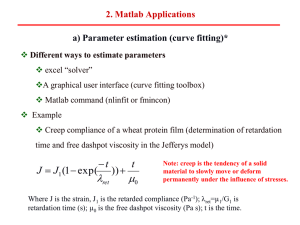
Here YR = (M/G) is known as the retardation time and is a measure of the time
delay in the strain after imposition of the stress. For high values of the viscosity, the
retardation time is long, and this represents the length of time the model takes to
attain (1 1/e) or 0.632 of the equilibrium elongation.
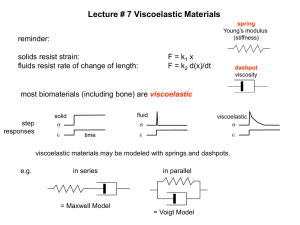
Such models are much too simple to describe the complex viscoelastic behavior
of a polymer, nor do they provide any real insight into the molecular mechanism of
the process, but in certain instances they can prove useful in assisting the understanding of the viscoelastic process.
13.6 LINEAR VISCOELASTIC BEHAVIOR
OF AMORPHOUS POLYMERS
A polymer can possess a wide range of material properties, and of these the hardness,
deformability, toughness, and ultimate strength are among the most signiÀcant. Certain
features such as high rigidity (modulus) and impact strength combined with low creep
characteristics are desirable in a polymer if eventually it is to be subjected to loading.
Unfortunately, these are conÁicting properties, as a polymer with a high modulus and
low creep response does not absorb energy by deforming easily and hence has poor
impact strength. This means a compromise must be sought depending on the use of
the polymer, and this requires knowledge of the mechanical response in detail.
The early work on viscoelasticity was performed on silk, rubber, and glass, and
it was concluded that these materials exhibited a delayed elasticity manifest in the
observation that the imposition of a stress resulted in an instantaneous strain, which
continued to increase more slowly with time. It is this delay between cause and
effect that is fundamental to the observed viscoelastic response, and the three major
examples of this hysteresis effect are (1) creep, where there is a delayed strain
response after the rapid application of a stress, (2) stress-relaxation (Section 13.15),
in which the material is quickly subjected to a strain and a subsequent decay of
stress is observed, and (3) dynamic response (Section 13.17) of a body to the
imposition of a steady sinusoidal stress. This produces a strain oscillating with the
same frequency as, but out of phase with, the stress. For maximum usefulness, these
measurements must be carried out over a wide range of temperature.
13.6.1 CREEP
To be of any practical use, an object made from a polymeric material must be able
to retain its shape when subjected to even small tensions or compressions over long
periods of time. This dimensional stability is an important consideration in choosing
a polymer for use in the manufacture of an item. No one wants a plastic telephone
receiver that sags after sitting in its cradle for several weeks, or a car tire that develops
a Áat spot if parked in one position for too long, or clothes made from synthetic
Àbers that become baggy and deformed after short periods of wear. Creep tests
provide a measure of this tendency to deform and are relatively easy to carry out.
Creep can be deÀned as a progressive increase in strain, observed over an
extended time period, in a polymer subjected to a constant stress. Measurements are
carried out on a sample clamped in a thermostat. A constant load is Àrmly Àxed to
Rheology and Mechanical Properties
361
one end, and the elongation is followed by measuring the relative movement of two
Àducial marks, made initially on the polymer, as a function of time. To avoid
excessive changes in the sample cross-section, elongations are limited to a few
percent and are followed over approximately three decades of time.
The initial, almost instantaneous, elongation produced by the application of the
tensile stress is inversely proportional to the rigidity or modulus of the material, i.e.,
an elastomer with a low modulus stretches considerably more than a material in the
glassy state with a high modulus. The initial deformation corresponds to portion OA
of the curve (Figure 13.13), increment a. The rapid response is followed by a region
of creep, A to B, initially fast, but eventually slowing down to a constant rate
represented by the section B to C. When the stress is removed the instantaneous
elastic response OA is completely recovered, and the curve drops from C to D, i.e.,
the distance ae = a. There follows a slower recovery in the region D to E which is
never complete, falling short of the initial state by an increment ce = c. This is a
measure of the viscous Áow experienced by the sample and is a completely nonrecoverable response. If the tensile load is enlarged, both the elongation and the
creep rate increase, so results are usually reported in terms of the creep compliance
J(t), deÀned as the ratio of the relative elongation y at time t to the stress so that
J (t ) = yE /X
(13.23)
At low loads, J(t) is independent of the load.
Stress removed
ε
C
c
B
a′
D
b
b′
A
a
E
c′
Ο
t
Stress applied
FIGURE 13.13 Schematic representation of a creep curve: a, initial elastic response; b,
region of creep; c, irrecoverable viscous Áow. This curve can be represented by the fourelement model shown in Figure 13.14.
362
Polymers: Chemistry and Physics of Modern Materials
σ
E1
E2
η2
η3
σ
(i)
(ii)
(iii)
(iv)
(v)
FIGURE 13.14 Use of mechanical models to describe the creep behavior of a polymeric
material.
This idealized picture of creep behavior in a polymer has its mechanical equivalent
constructed from the springs and dashpots described earlier. The changes a and ae
correspond to the elastic response of the polymer, and so we can begin with a Hookean
spring. The Voigt-Kelvin model is embodied in Equation 13.22, and this reproduces
the changes b and be. The Ànal changes c and ce represent viscous Áow, and can be
shown with a dashpot so that the whole model is a four-element model (Figure 13.14).
The behavior can be explained in the following series of steps. In diagram (i)
the system is at rest. The stress X is applied to spring E1 and dashpot M3; it is also
shared by E2 and M2, but in a manner that varies with time. In diagram (ii), representing zero time, the spring E1 extends by an amount X/E1(= a). This is followed
by a decreasing rate of creep with a progressively increasing amount of stress being
carried by E2 until eventually none is carried by M2, and E2 is fully extended [diagram
(iii)]. Such behavior is described by
J(t ) = (X 0 /E2 ){1 exp (t /Y R )}
(13.24)
where the retardation time YR provides a measure of the time required for E2 and M2
to reach 0.632 of their total deformation. A considerably longer time is required for
complete deformation to occur. When spring E2 is fully extended, the creep attains
a constant rate corresponding to movement in the dashpot M3. Viscous Áow continues
and the dashpot M3 is deformed until the stress is removed. At that time, E1 retracts
quickly along section ae and a period of recovery ensues (be). During this time spring
E2 forces the dashpot plunger in M2 back to its original position. As no force acts on
M3, it remains in the extended state and corresponds to the nonrecoverable viscous
Áow; region ce = Xt/M3. The system is then as shown in diagram (v). In practice, a
substance possesses a large number of retardation times, which can be expressed as
a distribution function L1(Y) where
L1 (Y) = d{J (t ) (t /M)}/d ln t.
(13.25)