See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/270427286
Penetration of dynamically installed anchors in clay
Article in Géotechnique · September 2013
DOI: 10.1680/geot.11.P.137
CITATIONS
READS
97
1,230
4 authors, including:
Conleth O'Loughlin
Christophe Gaudin
University of Western Australia
University of Western Australia
150 PUBLICATIONS 2,344 CITATIONS
182 PUBLICATIONS 4,162 CITATIONS
SEE PROFILE
Mark Randolph
University of Western Australia
396 PUBLICATIONS 18,211 CITATIONS
SEE PROFILE
Some of the authors of this publication are also working on these related projects:
Pullout capacity of anchors View project
Instrumented Free Fall Sphere View project
All content following this page was uploaded by Conleth O'Loughlin on 19 April 2016.
The user has requested enhancement of the downloaded file.
SEE PROFILE
O’Loughlin, C. D. et al. (2013). Géotechnique 63, No. 11, 909–919 [http://dx.doi.org/10.1680/geot.11.P.137]
Penetration of dynamically installed anchors in clay
C . D. O ’ L O U G H L I N , M . D. R I C H A R D S O N † , M . F. R A N D O L P H a n d C . G AU D I N This paper utilises centrifuge data to explore the penetration response of dynamically installed anchors
in normally consolidated clay. The data indicate that for anchors with no flukes, expected anchor tip
embedment depths are two to three times the anchor length for impact velocities approaching 30 m/s,
with a strong dependence on the net density of the anchor and smaller dependence on the impact
velocity. Total energy, defined as the sum of the kinetic energy of the anchor at the mudline and the
potential energy released as it penetrates the seabed, is shown to be a useful quantity for comparing
the embedment depth of anchors with markedly different geometries and mass, impacting the soil at
different velocities. The centrifuge data were used to calibrate an analytical embedment model, based
on strain-rate-dependent shearing resistance and fluid mechanics drag resistance. The merit of the
anchor embedment model has been demonstrated by predicting the final embedment depths for a
series of offshore field trials to within 4% of the measurements.
KEYWORDS: anchors; centrifuge modelling; offshore engineering
INTRODUCTION
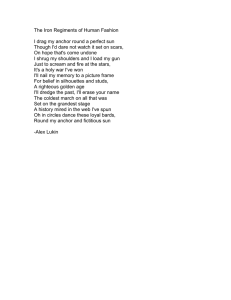
Dynamically installed anchors (see Fig. 1) are rocket or
torpedo shaped, with one such variant having a diameter of
1.2 m, a height of 13 m and a dry mass of 80 t (Lieng et al.,
2010). Smaller-diameter (0.76–1.07 m) anchors, 12–15 m
long and with a dry mass of between 24 and 98 t have been
used offshore Brazil (Medeiros, 2002; Brandão et al., 2006).
After release from a designated height above the seabed, the
anchor gains velocity as it falls freely through the water
column before impacting on and embedding within the
sediments. As anchor capacity is determined by the shear
strength of the soil in the vicinity of the embedded anchor,
confidence in the geotechnical performance of dynamically
installed anchors is dictated to a large degree by the success
of predicting the anchor embedment depth after free fall and
the strength recovery after installation (the latter aspect
having been investigated by Richardson et al., 2009). A key
aspect of predicting the anchor embedment depth is quantifying the penetration resistance over the high range of
penetration velocities and hence strain rates. Failure to
account for enhancement of penetration resistance due to the
high strain rates associated with dynamic installation has
been shown to give prediction errors of the order of 40%
(O’Loughlin et al., 2004).
The shear strength of clays is well known to be a function
of strain rate (Casagrande & Wilson, 1951; Graham et al.,
1983). Sheahan et al. (1996) reported shear strength increases of up to 11.5% per log cycle increase in shear strain
rate for normally consolidated Boston blue clay samples
undergoing triaxial compression. Chung et al. (2006) showed
that field T-bar penetration resistance increases by ,20%
per log cycle increase in penetration velocity for lightly
overconsolidated Burswood clay. This represents good agreement with work reported by Lehane et al. (2009) that
demonstrated a 14% and 18% increase in ball and T-bar
penetrometer resistance per log cycle increase in penetration
velocity in normally consolidated and overconsolidated kaolin clay. However, these and similar studies are generally
limited to strain-rate variations that span only two to three
orders of magnitude, compared with approximately seven
orders of magnitude in the case of dynamically installed
anchors.
This paper re-examines previously published centrifuge
data to explore the penetration behaviour of dynamically
installed anchors in normally consolidated clay. This behaviour is reflected in a simple embedment model that scales
the undrained shear strength according to logarithmic and
power functions, allowing for quantification of the strain-rate
behaviour for the more extreme dynamic anchor problem.
CENTRIFUGE TEST DATABASE
The centrifuge database compiled for this paper encompasses various series of centrifuge tests performed at 200g,
as reported in Richardson et al. (2006, 2009), Richardson
(2008) and O’Loughlin et al. (2004, 2009). It comprises 155
dynamic anchor installations in normally consolidated kaolin
clay exhibiting a prototype shear strength gradient in the
range k ¼ 1.0–1.3 kPa/m between samples. The anchor models, which varied in aspect ratio (length/diameter, L/d ), mass
m, fluke arrangement and tip geometry, were dropped
through an installation guide from (model) heights of up to
300 mm above the sample surface, resulting in anchor
impact velocities (i.e. anchor velocities at the mudline, vi )
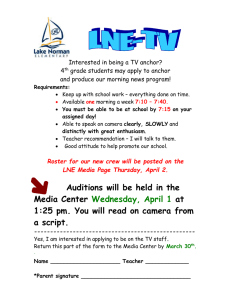
of up to 30 m/s. Details of the 25 model anchors are
summarised in Table 1 and are shown in Fig. 2.
Anchor impact velocity, mass and embedment depth
Typically, the impact velocities achieved in the centrifuge
tests ranged from ,10 to ,30 m/s, which compares well
with field experience: vi ¼ 10–22 m/s (Medeiros, 2001),
vi ¼ 24.5–27.0 m/s (Lieng et al., 2010) and vi ¼ 16–27 m/s
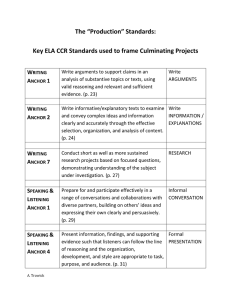
(Brandão et al., 2006). The dependence of final tip embedment, ze , on mass and impact velocity is summarised in Fig.
3(a) for an anchor aspect ratio L/d ¼ 12.5. The centrifuge
data for anchor A1 exhibit a degree of scatter that reflects
slight variation in undrained shear strength both between
samples and over the course of testing in any one sample.
Over the range of measured impact velocities, anchor A1
Manuscript received 11 November 2011; revised manuscript accepted
31 October 2012. Published online ahead of print 23 April 2013.
Discussion on this paper closes on 1 February 2014, for further details
see p. ii.
Centre for Offshore Foundation Systems, The University of Western
Australia, Crawley, Australia.
† Advanced Geomechanics, Nedlands, Australia.
909
O’LOUGHLIN, RICHARDSON, RANDOLPH AND GAUDIN
910
(a)
(b)
(c)
Fig. 1. Dynamically installed anchors: (a) torpedo anchor (after Araujo et al., 2004); (b) OMNI-Max anchor (after Shelton, 2007);
(c) deep penetrating anchor (Deep Sea Anchors, www.deepseaanchors.com/News.html)
Table 1. Model anchors
Anchor ref.
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
A14
A15
A16
A17
A18
A19
A20
A21
A22
A23
A24
A25
Flukes
Tipy
Padeyey
Length,
L: mm
Diameter,
d: mm
Tip length,
Ltip : mm
L/d
Material{
Effective anchor
density: kg/m3
Mass, m: g
0
0
0
0
4
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
E
E
E
E
E
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
F
F
F
F
F
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
75.0
75.0
75.0
75.0
75.0
6.0
9.0
12.0
18.0
24.0
36.0
24.0
36.0
36.0
48.0
60.0
72.0
72.0
84.0
9.0
18.0
27.0
27.0
12.0
24.0
6.0
6.0
6.0
6.0
6.0
6.0
6.0
6.0
6.0
6.0
6.0
6.0
6.0
6.0
6.0
6.0
6.0
6.0
6.0
9.0
9.0
9.0
9.0
12.0
12.0
11.4
11.4
11.4
11.4
11.4
3.0
3.0
3.0
3.0
3.0
3.0
3.0
3.0
3.0
3.0
3.0
3.0
3.0
3.0
4.5
4.5
4.5
4.5
6.0
6.0
12.5
12.5
12.5
12.5
12.5
1.0
1.5
2.0
3.0
4.0
6.0
4.0
6.0
6.0
8.0
10.0
12.0
12.0
14.0
1.0
2.0
3.0
3.0
1.0
2.0
B
B/A
B/A
A
B/A
B
B
B
B
B
B
A
A
A
A
A
A
A
A
B
B
B
A
B
B
7661–7929
4088
3062
2690
3902
8135
8892
7250
6742
7508
7708
2283
2434
1945
2499
2531
2526
2395
2597
7938
7451
7447
1998
8002
7967
14.3–14.8
8.2
6.2
5.4
9.6
0.9
1.8
2.0
3.0
4.7
7.4
1.4
2.3
1.9
3.2
4.2
5.0
4.7
6.0
3.0
7.1
11.4
3.0
7.2
18.0
Fluke length, L ¼ 37 mm; fluke width, w ¼ 9 mm; fluke thickness, t ¼ 0.4 mm.
f
f
f
y
E, ellipsoidal; F, flat; H, hemispherical (Lpad ¼ Ltip ).
{
B, brass; A, aluminium.
PENETRATION OF DYNAMICALLY INSTALLED ANCHORS IN CLAY
911
wf
tf
Lf
Lpad
L
L
L
Ltip
d
Ltip
Ltip
d
d
(a)
(b)
(c)
Fig. 2. 1:200 reduced scale anchors: (a) four-fluke, ellipsoidal-tip anchor (L/d
(c) zero-fluke, hemispherical-tip anchor (L/d 1–14)
50
5
10
Impact velocity, vi: m/s
15
20
25
30
35
A1: 0 flukes, m ⫽ 14·3–14·8 g
A2: 0 flukes, m ⫽ 8·2 g
A3: 0 flukes, m ⫽ 6·2 g
A4: 0 flukes, m ⫽ 5·4 g
A5: 4 flukes, m ⫽ 9·6 g
100
150
0
0
5
Impact velocity, vi: m/s
10
15
20
12.5);
25
20
Final tip embedment, ze: mm
Final tip embedment, ze: mm
0
0
12.5); (b) zero-fluke, ellipsoidal-tip anchor (L/d
40
60
80
100
200
120
140
250
A6: m ⫽ 0·9 g, L/d ⫽ 1·0
A8: m ⫽ 2·1 g, L/d ⫽ 2·0
A10: m ⫽ 4·7 g, L/d ⫽ 4·0
(a)
(b)
Fig. 3. Anchor embedment depth dependence on impact velocity and mass for: (a) L/d
(m ¼ 14.3–14.8 g, i.e. average equivalent prototype mass ¼
115 t, L/d ¼ 12.5) achieves final tip embedments of 150–
220 mm, which corresponds to 2.1–2.9 times the anchor
length. This is in good agreement with reported field experience of 1.9–2.4 times the anchor length for a 79 t anchor
A7: m ⫽ 1·8 g, L/d ⫽ 1·5
A9: m ⫽ 3·1 g, L/d ⫽ 3·0
A11: m ⫽ 7·4 g, L/d ⫽ 6·0
12.5; (b) L/d
1–6
with L/d ¼ 10.8 and four wide flukes (Lieng et al., 2010),
2.1 times the anchor length for a 98 t anchor with L/d ¼
15.9 and four narrow flukes (Brandão et al., 2006), and 2.4
times the anchor length for a 40 t anchor with L/d ¼ 15.7
and no flukes (Medeiros, 2001).
O’LOUGHLIN, RICHARDSON, RANDOLPH AND GAUDIN
Frictional resistance
Richardson (2008) conducted several dynamic installation
tests in which the 5–10 mm layer of surface water (to ensure
sample saturation) was temporarily removed. Over the same
range of measured impact velocities, tip embedment depths
for those tests were on average 20% lower than for those in
which the surface water was present. While it is acknowledged that water will indeed be present during offshore
installations, these results suggest that water may be entrained in a boundary layer along the anchor wall during
installation. This would reduce the effective normal stress at
the anchor/soil interface, resulting in a reduction in the
friction on the anchor shaft, which would promote embedment. Tika & Hutchinson (1999) have also commented on
the reduction in strength observed in high-rate ring-shear
tests during which water was permitted to penetrate the
shear zone. Richardson et al. (2009) showed that highvelocity embedment reduced the short-term capacity of the
anchor, compared with that for low-velocity embedment
(anchor released at the soil surface). Since the short-term
capacity is dominated by the effective stress level prior to
dissipation of the excess pore water pressures generated in
the boundary layer, this also suggests significant water
entrainment during dynamic embedment.
The question as to whether the soil separation occurs
along the anchor shaft is considered in Fig. 4 by examining
data for anchors with the same diameter and mass but
different lengths. If soil separation was to occur, then short
and long anchors should reach the same final embedment
depth, as the bearing resistance would be equivalent, and
soil separation would provide no frictional resistance. However, the data in Fig. 4 show that longer anchors embed less
than shorter anchors, which is consistent with higher frictional resistance afforded by greater available wall soil/
anchor surface area. Soil separation does not appear to occur
to any significant degree for the range of velocities considered here (, 20 m/s), which is consistent with observations
by Murff & Coyle (1973), who noted that soil separation
occurred only above a critical velocity of 28 m/s.
Total energy
Figures 3(a) and 3(b) illustrate the difficulty in comparing
embedment trends between anchors of different geometries
and mass. The comparison can be simplified somewhat by
considering the sum of the kinetic and potential energy
Impact velocity, vi: m/s
0
0
5
10
15
20
25
A20: m ⫽ 3·0 g, L/d ⫽ 1
A23: m ⫽ 3·0 g, L/d ⫽ 3
A10: m ⫽ 4·7 g, L/d ⫽ 4
A18: m ⫽ 4·7 g, L/d ⫽ 12
20
Final tip embedment, ze: mm
Interestingly, the tests with zero impact velocity (anchor
tip positioned at the clay surface prior to release) also
achieve relatively high tip embedment depths, which suggests a strong dependence on anchor mass. This is supported
by the lower mass anchor data in Fig. 3(a) (anchors A2 to
A4), which clearly show an increase in tip embedment with
increasing mass. Also shown in Fig. 3(a) are the limited data
available for anchor A5 with L/d ¼ 12.5 and four flukes (see
Table 1 for fluke dimensions). Interestingly, anchor A4
(m ¼ 5.4 g, no flukes) and anchor A5 (m ¼ 9.6 g, four
flukes) show similar penetration trends, despite the difference in anchor mass. The increase in mass in anchor A5,
which would promote penetration, is offset by the increased
wall surface area and associated increase in frictional resistance, which resists penetration.
The effects of mass and aspect ratio are examined in Fig.
3(b), which plots drum centrifuge data for L/d in the range
1–6. The data clearly show an increase in tip embedment
with an increase in L/d, but this is due to increasing mass.
As will be shown later, anchors of a given mass and diameter
show decreasing tip embedment with increasing L/d.
40
60
80
100
120
140
Fig. 4. Anchor embedment depth dependence on aspect ratio
(relative to final embedment depth) of the anchor as it
impacts on the soil. This is demonstrated in Fig. 5, where
tip embedment for the entire centrifuge database is plotted
as a function of the total energy of the anchor, defined as
Etotal ¼ 12mv2i þ m9gze
(1)
where m9 is the effective mass of the anchor (submerged
in soil), and g is the Earth’s gravitational acceleration ¼
9.81 m/s2 : A unique relationship now exists for a given
anchor diameter, with larger diameters giving lower embedment. These data are re-plotted in non-dimensional form
(removing the influence of diameter and soil strength gradient) in Fig. 6, together with available field data for dynamically installed anchors. The effective anchor diameter, deff ,
accounts for the additional projected area from the anchor
flukes. The centrifuge and field data in Fig. 6 now form a
relatively tight band, particularly considering the assumptions
employed regarding shear strength gradients and anchor
geometries for the field data. A conservative fit to the data
may be expressed as
Total energy, Etotal: J
0
0
1
2
3
4
5
6
7
8
9
10
11
12
25
Final tip embedment, ze: mm
912
50
75
100
125
150
175
200
225
L/d ⫽ 12·5, d ⫽ 6·0 mm, m ⫽ 5·4–14·8 g, ellipsoidal tip, 0 flukes
L/d ⫽ 12·5, deff ⫽ 7·4 mm, m ⫽ 9·6 g, ellipsoidal tip, 4 flukes
L/d ⫽ 1–14, d ⫽ 6·0 mm, m ⫽ 0·9–7·4 g, hemispherical tip, 0 flukes
L/d ⫽ 1–3, d ⫽ 9·0 mm, m ⫽ 3·0–11·4 g, hemispherical tip, 0 flukes
L/d ⫽ 1–2, d ⫽ 12·0 mm, m ⫽ 7·2–18·0 g, hemispherical tip, 0 flukes
Fig. 5. Anchor embedment depth dependence on total energy at
mudline
PENETRATION OF DYNAMICALLY INSTALLED ANCHORS IN CLAY
913
Etotal/kd4eff
0
0
5
10
15
20
25
30
35
40 ⫻103
5
Soil buoyancy
(Fb)
10
ze /deff
15
ze
20
deff
æ E total
艐ç
ç kd 4
è eff
Fluke reverse end
bearing (Fbear)
1/3
ö
÷
÷
ø
25
Fluke friction
(Ffrict)
30
35
Fluke end
bearing (Fbear)
40
Centrifuge tests (equivalent prototype scale):
m ⫽ 43·2–118·4 t, deff ⫽ 1·20 m, ellipsoidal tip, 0 flukes
Shaft friction
(Ffrict)
m ⫽ 76·8 t, deff ⫽ 1·47 m, ellipsoidal tip, 4 flukes
m ⫽ 7·2–59·2 t, deff ⫽ 1·20 m, hemispherical tip, 0 flukes
m ⫽ 24·0–91·2 t, deff ⫽ 1·80 m, hemispherical tip, 0 flukes
Submerged weight
(Ws)
m ⫽ 57·6–144·0 t, deff ⫽ 2·40 m, hemispherical tip, 0 flukes
Field tests:
m ⫽ 79 t, deff ⫽ 1·37 m (Lieng et al., 2010)
Inertial drag
(Fd)
m ⫽ 74 t, deff ⫽ 1·17 m (Brandão et al., 2006)
m ⫽ 98 t, deff ⫽ 1·17 m (Brandão et al., 2006)
Tip end bearing
(Fbear)
m ⫽ 39 t, deff ⫽ 1·56 m (Zimmerman et al., 2009)
Fig. 6. Comparison of centrifuge and field embedment data
ze
d eff
Etotal
kd 4eff
Fig. 7. Forces acting on a dynamically installed anchor during
installation
!1=3
(2)
This relationship harmonises a very large dataset that encompasses a wide range of anchor masses, geometries and
impact velocities.
ANCHOR EMBEDMENT MODEL
As anchor capacity is determined by the local shear
strength of the soil, the prediction of anchor capacity is
dictated to a large degree by the success of predicting the
final anchor embedment depth after free fall. The embedment of projectiles penetrating the seabed after free fall in
water may be quantified by considering Newton’s second law
of motion, and the forces acting on the projectile during
penetration. Several studies (e.g. True, 1976; Levacher,
1985; Beard, 1981; Aubeny & Shi, 2006; Audibert et al.,
2006) have adopted such an approach, with variations on the
inclusion and formulation of the various forces acting on the
projectile during penetration. A similar approach is adopted
here with the forces acting on the anchor during penetration
shown by Fig. 7, leading to a governing equation of
m
d2 z
¼ W s F b Rf ðF frict þ F bear Þ F d
dt2
(3)
where m is the anchor mass, z is depth, t is time, Ws is the
submerged anchor weight (in water), Fb is the buoyant
weight of the displaced soil, Rf is a shear strain rate function, Ffrict is frictional resistance, Fbear is bearing resistance,
and Fd is inertial drag resistance. Frictional and bearing
resistances are expressed as
F frict ¼ Æsu A
(4a)
F bear ¼ N c su A
(4b)
where Æ is a friction ratio (of limiting shear stress to
undrained shear strength), Nc is the bearing capacity factor
for the anchor tip or fluke, and su is the undrained shear
strength averaged over the contact area, A. The inclusion of a
fluid mechanics drag term, Fd , in equation (3) is warranted in
view of the very soft viscous clay that is often encountered at
the surface of the seabed. Inertial drag is formulated as
F d ¼ 12C d rs Ap v2
(5)
where Cd is the drag coefficient, rs is the density of soil, Ap
is the projected anchor area, and v is the current anchor
velocity.
The frictional resistance term (equation (4a)) comprises
friction on the shaft and the flukes, whereas the bearing
resistance term (equation (4b)) comprises bearing on the
base of the anchor shaft and flukes. Reverse end bearing at
the upper end of the anchor shaft (padeye) and flukes would
also be included when the cavity created by the passage of
the advancing anchor does not remain open. It is assumed
here that full closure will occur behind the anchor flukes,
owing to their relatively low thickness and apparent planestrain conditions, whereas hole closure will occur only
behind anchor shafts with L/d < 2 (assumed limit for a flowround probe). Aubeny & Shi (2006) also assumed that a
cylindrical void forms in the wake of dynamically installed
impact penetrometers (L/d ¼ 4.25); this assumption is supported by evidence from radiographs of centrifuge clay
samples (Poorooshasb & James, 1989) showing open pathways in the wake of dynamically installed cylindrical projectiles (despite closed entrance craters).
In reality it is likely that hole closure occurs eventually,
but not within the 10–15 ms taken for dynamic penetration
in the centrifuge. In view of this assumption, the soil buoyancy term (Fb ) is calculated as the displaced volume of soil
multiplied by the effective unit weight of soil (6.4 kN/m3 ),
where the displaced volume is limited to the volume of the
anchor for L/d < 2, and the combined volume of the flukes
914
O’LOUGHLIN, RICHARDSON, RANDOLPH AND GAUDIN
and a cylindrical shaft from the anchor tip to the soil surface
for L/d . 2.
Effect of strain rate on undrained shear strength
The dependence of shear strength on shear strain rate is
generally formulated using either semi-logarithmic or power
functions (e.g. Biscontin & Pestana, 2001), and has been
accounted for in equation (2) by scaling the bearing and
frictional resistances by a rate function Rf , expressed as
ª_
ª_
or Rf ¼
(6)
Rf ¼ 1 þ º log
ª_ ref
ª_ ref
where º and are strain-rate parameters in the respective
formulations, ª_ is the strain rate, and ª_ ref is the reference
strain rate associated with the reference value of undrained
shear strength. Experimental evidence shows that the strainrate dependence of soil strength tends to increase with
increasing strain rate (Lunne & Andersen, 2007). Therefore
caution is needed in using the above expressions (particularly the semi-logarithmic function) to adjust shear strength
over several orders of magnitude difference in strain rate.
Ideally, the reference shear strength should be obtained at a
reference strain rate, ª_ ref , that is relatively close (within two
or three orders of magnitude) to that relevant for the
application.
In the centrifuge tests considered here, the shear strength
was measured using a 5 mm diameter T-bar penetrating at
1 mm/s (i.e. 0.2 diameters per second) in conjunction with
the theoretical T-bar factor of 10.5 (Randolph & Houlsby,
1984). The T-bar factor is, in principle, correlated against
low-strain-rate tests, where the effects of the high strain rates
that occur during a penetrometer test are partly compensated
for by loss of strength of the soil due to cumulative strains
(Einav & Randolph, 2005; Zhou & Randolph, 2009).
During anchor penetration, the shear strain rate will vary
through the soil body, but it is reasonable to assume that at
any given location the operational strain rate may be
approximated by the normalised velocity, v/d. As discussed
in the following section, base (static) values of friction and
end-bearing parameters were back-analysed with reference to
static penetration tests of the anchor, which were conducted
at a penetration velocity of v ¼ 1 mm/s (so v/d ¼ 0.17 s1 ).
This normalised velocity may therefore be used as a reference value for assessing the shear strength for high penetration rates. Essentially, equation (6) may be replaced by
"
#
"
#
v=d
v=d
(7)
or Rf ¼
Rf ¼ 1 þ º log
ðv=d Þref
ðv=d Þref
where (v/d )ref ¼ 0.17 s1 :
Calibration
Equation (3) requires an assessment of the shear resistance terms Æ and Nc , in addition to selection of an appropriate drag coefficient. The adhesion factor, Æ, during
installation may be conveniently estimated as the inverse of
the soil sensitivity (Andersen et al., 2005). For kaolin clay
with a sensitivity St ¼ 2.5 (Watson et al., 2000) this would
give Æ ¼ 0.4, consistent with back-figured Æ values from
suction caisson installations in kaolin (e.g. Gaudin et al.,
2006; Chen & Randolph, 2007).
O’Loughlin et al. (2009) measured the penetration resistance at the top of an ellipsoidal-tipped anchor with no
flukes and L/d ¼ 12.5 during penetration at 1 mm/s, and
showed that analysis of the measured resistance using
Æ ¼ 0.4 yielded Nc ¼ 12. For consistency, Nc ¼ 12 is adopted
here for both the ellipsoidal- and hemispherical-tipped anchors. However, as the ellipsoidal tip is almost four times
the length of the hemispherical tip, the area over which
bearing resistance acts is limited to the projected area at a
tip length ¼ d/2 (i.e. the actual tip length of the hemispherical tip). The bearing capacity at the base and upper end of
the anchor flukes has been modelled as a deeply embedded
strip footing using Nc ¼ 7.5 (Skempton, 1951).
Adopted Cd values are in line with computational fluid
dynamics results reported by Øye (2000) and Richardson
(2008): Cd ¼ 0.63 for the ellipsoidal-tipped, four-fluke anchor A5; Cd ¼ 0.24 for the ellipsoidal-tipped, flukeless
anchors A1 to A4; and for hemispherical-tipped anchors A6
to A25, Cd ¼ 0.35 for L/d ¼ 1 (i.e. a sphere) reducing to
Cd ¼ 0.23 for L/d > 4.
The motion of the anchor and hence the magnitude of the
penetration resistant forces may be estimated from a finite
difference approximation of equation (3). The contributions
of these anchor resistance forces are plotted in Fig. 8 for
anchors A6, A10 and A17 (i.e. hemispherical-tipped anchors
with no flukes and L/d ¼ 1, 4 and 12; Figs 8(a) to 8(c)
respectively), and also for anchor A5, an ellipsoidal-tipped
anchor with four flukes and L/d ¼ 12.5 (Fig. 8(d)). To
facilitate comparison, the anchor impact velocity, undrained
shear strength gradient, strain rate parameter and anchor
density were kept constant for each simulation: vi ¼ 20 m/s,
k ¼ 1.0 kPa/m, ¼ 0.06 (power law) and anchor density ¼
7850 kg/m3 (such that the model anchor mass is 0.89 g,
4.88 g, 15.54 g and 19.25 g for anchors A6, A10, A17 and
A5 respectively). The comparison of the resistant forces for
each anchor in Fig. 8 leads to the following comments.
(a) Inertial drag is seen to be the dominant resistance over
shallow penetrations, as the velocity of the anchor is high,
and the resistance from the shear strength of the soil is
low. The relative contribution of inertial drag resistance
decreases as the anchor length and hence frictional
resistance increases: for example, inertial drag is
dominant over the initial 38% embedment for anchor
A6 (L/d ¼ 1), reducing to 14% for anchor A10 (L/d ¼ 4)
and 8% for anchor A17 (L/d ¼ 12).
(b) Despite the very low projected tip area compared with
wall area, end-bearing resistance contributes significantly
to the total resistance, even for high L/d ratios. For
hemispherical-tipped anchors with no flukes, end-bearing
resistance exceeds frictional resistance up to L/d ¼ 10,
despite the wall area being 36 times the projected tip
area. For anchor A5, with relatively large flukes,
frictional resistance exceeds bearing resistance once the
full width of the fluke is embedded, and by a factor of up
to 3.5 thereafter; this is due to the significantly greater
wall area afforded by the flukes, and also the reduced
bearing area assumed for the ellipsoidal tip.
(c) Strain-rate effects are seen to increase the frictional and
bearing resistance significantly; for the cases considered
here the increase is approximately twofold
(e.g.
:
Rf ¼ [(v=d)=(v=d)ref ] ¼ [(20=0:006)=0:17]0 06 ¼ 1:81)
over the bulk of the embedment.
(d ) Soil buoyancy increases with depth where no hole closure
is assumed (L/d . 2), and in all cases is approximately
half the strain-rate-enhanced bearing resistance. Where
hole closure is assumed (L/d , 2), soil buoyancy increases until the anchor fully penetrates the soil, and then
remains constant with depth. A number of analyses were
conducted in which hole closure was assumed (for all L/d
ratios) and reverse end bearing at the anchor padeye was
modelled for L/d . 2. The results indicate that the
reduction in soil buoyancy due to hole closure is
overcompensated (by between 13% and 23% of the total
PENETRATION OF DYNAMICALLY INSTALLED ANCHORS IN CLAY
0
0
Penetration resistance: N
2
3
4
1
5
6
0
0
2
4
915
Penetration resistance: N
6
8
10
12
14
16
Fd
Tip embedment: mm
Fd
20
A1: L/d ⫽ 1
Tip embedment: mm
10
20
30
Rf · Fbear
Fb
40
Fbear
50
0
5
10
30
35
40
0
Ffrict
Fb
Rf · Ffrict
Fbear
Rf · Fbear
(b)
0
10
20
Penetration resistance: N
30
40
50
60
70
80
Fd
Tip embedment: mm
Tip embedment: mm
100
50
A17: L/d ⫽ 12
100
150
Fd
Fb Fbear
Rf · Fbear
Rf · Ff rict
Ffrict
A5: L/d ⫽ 12·5
100
150
Fb
200
250
300
80
140
(a)
Penetration resistance: N
15
20
25
50
200
60
120
60
0
A10: L/d ⫽ 4
40
Rf · Fbear
Ffrict
250
(c)
resistance for all L/d . 2) by the introduction of reverse
end-bearing resistance at the anchor padeye. However,
this increase is not only a function of the anchor
geometry, but also varies with impact velocity and the
effective unit weight of the soil.
Rf · Ffrict
(d)
Fig. 8. Penetration resistance profiles for various anchor geometries: (a) A1, L/d
(four-fluke anchor)
1; (b) A10, L/d
4; (c) A17, L/d
12; (d) A5, L/d
12.5
Velocity: m/s
0
0
5
10
15
20
25
30
50
Anchor embedment: mm
Figure 9 compares velocity profiles of the anchor during
embedment in soil for anchors A1 and A4 with anchor drop
heights in the range 0–200 mm. The instrumentation used to
measure anchor impact velocity also gives an indication of
the anchor velocity profile over the first anchor length of
penetration (shown by the symbols in Fig. 9). Strain-rate
dependence has been quantified by back-calculating º and (for the logarithmic and power laws respectively) so that the
theoretical embedment depth matches the measured embedment depth for each test. The resulting theoretical velocity
profiles are compared with the measured profiles in Fig. 9,
where the agreement between measured and calculated velocity is reasonable, particularly for the tests with non-zero
impact velocity.
The theoretical velocity profiles in Fig. 9 can be considered representative of either the logarithmic or power rate
law, as there are no observable differences in the calculated
velocity profiles using either rate function. Both the calculated and measured profiles show the anchor velocity to
increase during shallow embedment. This observation is
most prominent for the test with zero impact velocity, where
the theoretical velocity increases from 0 m/s at the clay
surface to a maximum velocity of ,6.5 m/s at ,0.5 anchor
lengths. The net increase in velocity during shallow penetration is also seen to reduce (for a given anchor) as the impact
Fbear
100
β ⫽ 0·129
λ ⫽ 0·569
β ⫽ 0·110
λ ⫽ 0·421
β ⫽ 0·112
λ ⫽ 0·443
β ⫽ 0·136
λ ⫽ 0·648
150
200
β ⫽ 0·134
λ ⫽ 0·634
β ⫽ 0·131
λ ⫽ 0·601
250
Predicted, equation (3)
A4: m ⫽ 5·4 g, 0 mm drop height (drum)
A4: m ⫽ 5·4 g, 50 mm drop height (drum)
A4: m ⫽ 5·4 g, 200 mm drop height (drum)
A1: m ⫽ 14·8 g, 100 mm drop height (drum)
A1: m ⫽ 14·3 g, 150 mm drop height (drum)
A1: m ⫽ 14·3 g, 200 mm drop height (drum)
Fig. 9. Predicted and measured anchor velocity profiles
velocity increases. This is to be expected, as the closer the
impact velocities approach the anchor’s terminal velocity, the
less acceleration will occur within the soil. As soil strength
increases with depth, at some depth the inertial drag and
O’LOUGHLIN, RICHARDSON, RANDOLPH AND GAUDIN
916
shear resistance outweigh the submerged weight of the
anchor, and the anchor decelerates. The depth at which the
anchor begins to decelerate reduces with increasing impact
velocity, reflecting the increase in inertial drag and shear
resistance with velocity (or strain rate).
Figure 9 also shows that the strain-rate parameters increase with increasing impact velocity. This is made clearer
by Fig. 10, which plots back-figured º and as functions of
vav /deff (where vav is the average anchor velocity during
penetration). Back-figured values corresponding to tests on
anchors with an effective anchor density less than
,2000 kg/m3 (see Table 1) are not included in Fig. 10, as
back-analysis for these cases yielded much lower strain-rate
parameters (º , 0.2 and , 0.06). Although the reason for
this is not yet understood, equation (3) evidently overestimates the penetration resistance for near-buoyant objects
dynamically penetrating soil. Fig. 10 shows that the ranges
of º and are typically 0.2–1.0 and 0.06–0.17 respectively
as vav /d increases from 500 to 4250 s1 (vi ¼ 0 to ,30 m/s).
Values of º ¼ 0.2–1.0 imply 20–100% increase in soil
strength, and hence in penetration resistance per log cycle of
penetration velocity or strain rate. The lower bound of this
range is compatible with previous studies: for example,
º 0.2 determined from field and centrifuge T-bar tests in
Burswood clay (Chung et al., 2006), º ¼ 0.2 and 0.15 respectively for T-bar and ball field tests in Bothkennar clay
(Boylan et al., 2007), and º 0.15 inferred from mobilised
shear strength data for three piles in soft clay (Oslo, Gothenburg and Mexico City; Bjerrum, 1973). The lower bound
¼ 0.06 is in agreement with ¼ 0.06 determined from
ball centrifuge tests in kaolin clay (Lehane et al., 2009),
whereas the entire range is similar to the ¼ 0.05–0.1 range
reported by Biscontin & Pestana (2001) and Peuchen &
Mayne (2007) for shear vane tests in various clays.
The observed variation of º and suggests that, over
several orders of magnitude increase in strain rate, shear
strength increases more rapidly than can be fitted using
either the logarithmic or power law. Similar observations
have been made by Biscontin & Pestana (2001), Peuchen &
Mayne (2007) and Lunne & Andersen (2007).
An important point is that the strain rates (proportional to
v/d ) in the centrifuge tests are on average 200 times equivalent strain rates in the field, as the absolute velocities are
comparable, but the anchor diameter is scaled by 1:200. As
shown by Fig. 10, values of vav /deff in the centrifuge tests
are in the range 500–4250 s1 , compared with vav /
deff 20 s1 for a typical dynamically installed anchor in
the field (vav ¼ 20 m/s, deff ¼ 1 m). Hence appropriate
strain-rate parameters for use in the field are likely to fall at
the lower extreme of the range quoted above, and would
therefore be similar to parameters deduced from variablerate penetrometer tests. These have tended to give º values
in the range 0.15–0.2 (Low et al., 2008), or values of
0.06–0.08 (Lehane et al., 2009).
Application to full-scale tests
Evaluation of a deep ocean nuclear waste disposal option
in the 1980s included a number of field trials in which
various projectiles were dynamically embedded in the seabed
in a manner similar to that for dynamically installed anchors. The most successful and well-documented trials took
place in the Atlantic Ocean at Great Meteor East, which is
an area at the western extremity of the Madeira Abyssal
Plain (about 800 km west of the Canary Islands), in water
depths of approximately 5000 m (Freeman & Burdett, 1986).
An extensive geotechnical database has been established for
Great Meteor East (e.g. Freeman & Burdett, 1986; Freeman &
Schüttenhelm, 1990; Baudet & Ho, 2004; Brandes, 2011).
These data indicate that the seabed sediments consist of thick
turbidite layers of up to 5 m, alternating with thin (,10 cm)
layers of pelagic sediments. The sediments are very soft, with
natural moisture contents generally in excess of the liquid
limit, and unit weights typically about 14 kN/m3 : Undrained
0·20
0·15
β 0·10
0·05
0
0
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
3000
3500
4000
4500
5000
vav /deff: s⫺1
1·20
1·00
0·80
λ 0·60
0·40
0·20
0
0
500
1000
1500
2000
2500
vav /deff: s⫺1
Anchors A1–A4, L/d ⫽ 12·5, m ⫽ 5·4–14·8 g, 0 flukes
Anchors A5, L/d ⫽ 12·5, m ⫽ 9·6 g, 4 flukes
Anchors A6–A25, L/d ⫽ 1–14, m ⫽ 0·9–18·04 g, 0 flukes
Fig. 10. Back-analysed strain-rate parameters
PENETRATION OF DYNAMICALLY INSTALLED ANCHORS IN CLAY
shear strength determinations have been made using a combination of miniature shear vane and triaxial tests on gravity
cores up to 35 m in length. Freeman & Schüttenhelm (1990)
suggest that the triaxial shear strength data are best approximated by su ¼ 1.3 + 1.48z kPa over the available sampling
depth of 33 m. Freeman & Burdett (1986) suggest that the
most reliable undrained shear strength ratio su = v9 ¼ 0:375,
corresponding to an su gradient k ¼ 1.5 kPa/m. This is in
reasonable agreement with su = v9 0:31 and k ¼ 1.35 kPa/m
reported by Brandes (2011) over the upper 15 m. In view of
these studies, the undrained shear strength profile for the field
predictions has been approximated by su ¼ 1.5z kPa.
Trials referred to as the ‘Tyro 86 experiments’ (Freeman
et al., 1988), focused on a hollow steel projectile with length
3.56 m, diameter 0.356 m (i.e. L/d ¼ 10) and dry mass in
the range 1755–3210 kg. Velocity profiles during seabed
embedment are shown for the successful tests in Fig. 11, in
addition to corresponding predicted profiles obtained using
equation (3). Despite the high terminal velocities in the field
trials (up to 70 m/s) and the relatively low projectile diameter, v/d does not exceed 200 s1 , and therefore a typical
lower bound ¼ 0.07 has been adopted for the predictions
(average of ¼ 0.06–0.08 from variable-rate penetrometer
tests; Lehane et al., 2009). The field predictions make the
same assumptions as for the centrifuge tests, assuming no
hole closure behind the advancing penetrometer, adopting
Nc ¼ 12 (where the tip bearing area is limited to the
projected area at a tip length ¼ d/2) and Cd ¼ 0.24. Given
that the deposits are described as being of medium to high
sensitivity (Baudet & Ho, 2004), Æ was taken as 0.2,
consistent with St ¼ 5 for a medium-sensitivity deep-water
sediment (assuming Æ ¼ 1/St ).
The predictions in Fig. 11 are seen to be in good
agreement with the measured profiles, with final embedment depths that are consistently within 4% of the measurements. This is particularly encouraging, as measured
shear strength deviates from su ¼ 1.5z kPa between 15 and
30 m (Brandes, 2011), and the available shear strength data
extend only to 35 m. The most significant deviations from
the measured embedment are for tests 8605 and 8610.
However, the predictions are in excellent agreement with
the measured profile over the initial 45 m of embedment, at
which point the predicted and measured velocities deviate.
This suggests that at these test locations the strength of the
soil below 45 m is greater than the assumed shear strength
profile.
CONCLUSIONS
This paper considers published centrifuge data to explore
the penetration response of dynamically installed anchors in
normally consolidated kaolin clay. The main findings are
summarised as follows.
(a) Anchor embedment depths are in good agreement with
published field data, and are a function of the (effective)
mass, impact velocity, geometry and fluke arrangement of
the anchor. Anchor tip embedment increases with
increasing impact velocity and anchor mass, and anchors
of a given mass and diameter show decreasing embedment with increasing length. Total energy has been shown
to be a useful approach for comparing anchors with
markedly different geometries and mass, impacting the
soil at different impact velocities. The approach produces
a unique relationship between normalised total energy
and embedment depth ratio.
(b) The question of whether soil separation occurs during
dynamic penetration was examined by comparing the
embedment response of anchors with the same mass and
diameter but with different L/d ratios. The embedment of
the short (low L/d ) anchors was consistently higher than
that of the long (high L/d ) anchors, which suggests that
Velocity: m/s
0
0
10
20
30
40
50
Velocity: m/s
60
70
80
0
10
10
20
30
40
50
60
No. 8613
m ⫽ 1755 kg
No. 8601
m ⫽ 1870 kg
20
30
No. 8606
m ⫽ 2345 kg
40
No. 8608
m ⫽ 2330 kg
50
0
10
Embedment: m
Embedment: m
20
917
No. 8605
m ⫽ 3165 kg
30
40
No. 8604
m ⫽ 2300 kg
No. 8603
m ⫽ 2345 kg
50
No. 8610
m ⫽ 3130 kg
60
60
70
No. 8612
m ⫽ 3145 kg
70
Measured
Predicted
Fig. 11. Predicted and measured velocity profiles: free-fall penetrometer tests at Great Meteor East
70
80
O’LOUGHLIN, RICHARDSON, RANDOLPH AND GAUDIN
918
soil separation does not appear to occur (over the full
length of the anchor) for impact velocities lower than
20 m/s. However, there are also indications that water
entrainment plays a role in increasing the penetration,
reducing the effective contact stress along the anchor/soil
interface.
(c) The centrifuge data have been used to calibrate an anchor
embedment model based on strain-rate-dependent shearing resistance and fluid mechanics drag resistance.
Although the inclusion of drag resistance is seen to be
important for short anchors (low L/d ) and over shallow
penetrations, as L/d increases the contribution of drag
resistance becomes small relative to the dominating effect
of strain-rate-enhanced shear resistance, which was
modelled using both logarithmic and power functions.
The back-figured strain rate parameters º (logarithmic
function) and (power function) are seen to increase with
increasing impact velocity, and are in the ranges 0.2–1.0
and 0.06–0.17 respectively as the impact velocity
increases from 0 to ,30 m/s. The lower bounds of both
strain-rate parameters are consistent with results from
variable-rate penetration tests (e.g. Low et al., 2008;
Lehane et al., 2009). These lower-bound values are
considered more appropriate for field conditions, as the
strain rates in the centrifuge tests are on average 200
times equivalent strain rates in the field, since the
absolute velocities are comparable but the anchor
diameter is scaled by 1:200.
(d ) The anchor embedment model produced velocity profile
predictions that agree well with corresponding velocity
profiles from a series of full-scale free-fall penetrometer
tests, with predicted final embedment depths that are
within 4% of the measurements.
ACKNOWLEDGEMENTS
The work described in this paper was supported by the
Australian Research Council Linkage programme and Woodside Energy Limited. It forms part of the activities of the
Centre for Offshore Foundation Systems (COFS), currently
supported as a node of the Australian Research Council
Centre of Excellence for Geotechnical Science and Engineering, and by The Lloyd’s Register Educational Trust.
NOTATION
A
Ap
Cd
d
deff
Etotal
Fb
Fbear
Fd
Ffrict
g
k
L
Lpad
Ltip
m
m9
Nc
Rf
St
su
t
tf
v
vav
contact area
projected area
drag coefficient
diameter
effective diameter
total energy
buoyant weight of displaced soil
end-bearing resistance
inertial drag resistance
frictional resistance
Earth’s gravitational acceleration
undrained shear strength gradient with depth
length
length of anchor padeye
length of anchor tip
mass
effective mass submerged in soil
bearing capacity factor
shear strain rate function
sensitivity of soil
undrained shear strength
time
fluke thickness
velocity
average velocity during penetration
vi
Ws
wf
z
ze
Æ
ª_
ª_ ref
º
rs
v9
impact velocity
submerged weight
fluke width
depth
final tip embedment
adhesion factor
strain-rate parameter (power law)
strain rate
reference strain rate
strain-rate parameter (logarithmic law)
density of soil
vertical effective stress
REFERENCES
Andersen, K. H., Murff, J. D., Randolph, M. F., Cluckey, E. C.,
Erbrich, C. T., Jostad, H. P., Hansen, B., Aubeny, C., Sharma, P.
& Supachawarote, C. (2005). Suction anchors for deepwater
applications. Proc. Int. Symp. Frontiers in Offshore Geotechnics,
ISFOG05, Perth, 3–30.
Araujo, J. B., Machado, R. D. & Medeiros, C. J. (2004). High
holding power torpedo pile – results from the first long term
application. Proc. Int. Conf. Offshore Mech. Arctic Engng,
Vancouver, paper OMAE2004-51201.
Aubeny, C. P. & Shi, H. (2006). Interpretation of impact penetration
measurements in soft clays. J. Geotech. Geoenv. Engng ASCE
132, No. 6, 770–777.
Audibert, J. M. E., Movant, M. N., Won, J-Y. & Gilbert, R. B.
(2006). Torpedo piles: laboratory and field research. Proc. 16th
Int. Polar Offshore and Polar Engng Conf., San Francisco, CA,
462–468.
Baudet, B. A. & Ho, E. W. L. (2004). On the behaviour of deepocean sediments. Géotechnique 54, No. 9, 571–580, http://
dx.doi.org/10.1680/geot.2004.54.9.571.
Beard, R. M. (1981). A penetrometer for deep ocean seafloor
exploration. Proc. IEEE Oceans ’81, Boston, MA 13, 668–673.
Biscontin, G. & Pestana, J. M. (2001). Influence of peripheral
velocity on vane shear strength of an artificial clay. Geotech.
Test. J. ASTM 24, No. 4, 423–429.
Bjerrum, L. (1973). Problems of soil mechanics and construction
on soft clays: state-of-the-art report. Proc. 8th Int. Conf. Soil
Mech. Found. Engng, Moscow 3, 109–159.
Boylan, N., Long, M., Ward, D., Barwise, A. & Georgious, B.
(2007). Full-flow penetrometer testing in Bothkennar clay. Proc.
6th Int. Offshore Site Investigation and Geotechnics Conf.,
London, 177–186.
Brandão, F. E. N., Henriques, C. C. D., Araújo, J. B., Ferreira, O.
C. G. & Amaral, C. D. S. (2006). Albacora Leste field development: FPSO P-50 mooring system concept and installation.
Proc. Offshore Technol. Conf., Houston, TX, paper OTC 18243.
Brandes, H. G. (2011). Geotechnical characteristics of deep-sea
sediments from the North Atlantic and North Pacific oceans.
Ocean Engng 38, No. 7, 835–848.
Casagrande, A. & Wilson, S. D. (1951). Effect of rate of loading
on the strength of clays and shales at constant water content.
Géotechnique 2, No. 3, 251–263, http://dx.doi.org/10.1680/
geot.1951.2.3.251.
Chen, W. & Randolph, M. F. (2007). External radial stress changes
and axial capacity for suction caissons in soft clay. Géotechnique 57, No. 6, 499–511, http://dx.doi.org/10.1680/geot.2007.
57.6.499.
Chung, S. F., Randolph, M. F. & Schneider, J. A. (2006). Effect of
penetration rate on penetrometer resistance in clay. J. Geotech.
Geoenviron. Engng ASCE 132, No. 9, 1188–1196.
Einav, I. & Randolph, M. F. (2005). Combining upper bound and
strain path methods for evaluating penetration resistance. Int. J.
Numer. Methods Engng 63, No. 14, 1991–2016.
Freeman, T. J. & Burdett, J. R. F. (1986). Deep ocean model
penetrator experiments, Final report to Commission of European
Communities, Report No. EUR 10502. Luxembourg: Commission of the European Communities, Directorate-General Telecommunications, Information Industries and Innovation.
Freeman, T. J. & Schüttenhelm, R. T. E. (1990). A geotechnical
investigation of a deep ocean site. In Geotechnical engineering
of ocean waste disposal (eds K. R. Demars and R. C. Chaney),
PENETRATION OF DYNAMICALLY INSTALLED ANCHORS IN CLAY
ASTM Special Technical Publication 1087, pp. 255–275. West
Conshohocken, PA, USA: ASTM International.
Freeman, T. J., Murray, C. N. & Schuttenhelm, R. T. E. (1988). The
Tyro 86 penetrator experiments at Great Meteor East. Proc.
Oceanology ’88, Brighton 16, 217–226.
Gaudin, C., O’Loughlin, C. D., Randolph, M. F. & Lowmass, A.
(2006). Influence of the installation process on the performance
of suction embedded plate anchors. Géotechnique 56, No. 6,
381–391, http://dx.doi.org/10.1680/geot.2006.56.6.381.
Graham, J., Crooks, J. H. A. & Bell, A. L. (1983). Time effects on
the stress–strain behaviour of natural soft clays. Géotechnique
33, No. 3, 327–340, http://dx.doi.org/10.1680/geot.1983.33.
3.327.
Lehane, B. M., O’Loughlin, C. D., Gaudin, C. & Randolph, M. F.
(2009). Rate effects on penetrometer resistance in kaolin. Géotechnique 59, No. 1, 41–52, http://dx.doi.org/10.1680/geot.
2007.00072.
Levacher, D. (1985). Pénétromètre à chute libre: impact et pénétration dans des argiles reconstituées. Can. Geotech. J. 22, No. 1,
129–135.
Lieng, J. T., Tjelta, T. I. & Skaugset, K. (2010). Installation of two
prototype deep penetrating anchors at the Gjøa Field in the
North Sea. Proc. Offshore Technol. Conf., Houston, TX, paper
OTC 20758.
Low, H. E., Randolph, M. F., DeJong, J. T. & Yafrate, N. J. (2008).
Variable rate full-flow penetration tests in intact and remoulded
soil. Proc. 3rd Int. Conf. on Site Characterization, Taipei,
1087–1092.
Lunne, T. & Andersen, K. H. (2007). Soft clay shear strength
parameters for deepwater geotechnical design. Proc. 6th Int.
Offshore Site Investigation and Geotechnics Conf., London,
151–176.
Medeiros, C. J. (2001). Torpedo anchor for deep water. Proceedings
of the deepwater offshore technology conference, Rio de Janeiro.
Medeiros, C. J. (2002). Low cost anchor system for flexible risers
in deep waters. Proc. Offshore Technol. Conf., Houston, TX,
paper OTC 14151.
Murff, J. D. & Coyle, H. M. (1973). Low velocity penetration of kaolin
clay. J. Soil Mech. Found. Div. ASCE 99, No. SM5, 375–389.
O’Loughlin, C. D., Randolph, M. F. & Richardson, M. D. (2004).
Experimental and theoretical studies of deep penetrating
anchors. Proc. Offshore Technol. Conf., Houston, TX, paper
OTC 16841.
O’Loughlin, C. D., Randolph, M. F. & Richardson, M. D. (2009).
Centrifuge tests on dynamically installed anchors. Proc. 28th
Int. Conf. on Ocean, Offshore and Arctic Engng, Honolulu,
paper OMAE2009-80238.
Øye, I. (2000). Simulation of trajectories for a deep penetrating
View publication stats
919
anchor, Report No. 250:2000. Trondheim, Norway: CFD
Norway.
Peuchen, J. & Mayne, P. (2007). Rate effects in vane shear testing.
Proc. Int. Offshore Site Investigation and Geotechnics Conf.,
London, 187–194.
Poorooshasb, F. & James, R. G. (1989). Centrifuge modelling of
heat-generating waste disposal. Can. Geotech. J. 26, No. 4,
640–652.
Randolph, M. F. & Houlsby, G. T. (1984). The limiting pressure on
a circular pile loaded laterally in cohesive soil. Géotechnique
34, No. 4, 613–623, http://dx.doi.org/10.1680/geot.1984.34.
4.613.
Richardson, M. D. (2008). Dynamically installed anchors for floating offshore structures. PhD thesis, The University of Western
Australia, Crawley, Australia.
Richardson, M., O’Loughlin, C. D. & Randolph, M. F. (2006).
Drum centrifuge modelling of dynamically penetrating anchors.
Proc. 6th Int. Conf. on Physical Modelling in Geotechnics,
Hong Kong 1, 673–678.
Richardson, M. D., O’Loughlin, C. D., Randolph, M. F. & Gaudin,
C. (2009). Setup following installation of dynamic anchors in
normally consolidated clay. J. Geotech. Geoenviron. Engng
ASCE 135, No. 4, 487–496.
Sheahan, T. C., Ladd, C. C. & Germaine, J. T. (1996). Ratedependent undrained shear behavior of saturated clay. J. Geotech. Geoenviron. Engng ASCE 122, No. 2, 99–108.
Shelton, J. T. (2007). OMNI-Max anchor development and technology. Proc. Oceans 2007, Vancouver.
Skempton, A. W. (1951). The bearing capacity of clays. Proceedings of the building research congress, London, Vol. 1, pp.
180–189.
Tika, Th. E. & Hutchinson, J. N. (1999). Ring shear tests on soil
from the Vaiont landslide slip surface. Géotechnique 49, No. 1,
59–74, http://dx.doi.org/10.1680/geot.1999.49.1.59.
True, D. G. (1976). Undrained vertical penetration into ocean
bottom soils. PhD thesis, University of California, Berkeley, CA,
USA.
Watson, P. G., Suemasa, N. & Randolph, M. F. (2000). Evaluating
undrained shear strength using the vane shear apparatus. Proc.
10th Int. Offshore and Polar Engng Conf., Seattle, WA 2, 485–
493.
Zhou, H. & Randolph, M. F. (2009). Resistance of full-flow
penetrometers in rate-dependent and strain-softening clay. Géotechnique 59, No. 2, 79–86, http://dx.doi.org/10.1680/
geot.2007.00164.
Zimmerman, E. H., Smith, M. W. & Shelton, J. T. (2009). Efficient
gravity installed anchor for deepwater mooring. Proc. Offshore
Technol. Conf., Houston, TX, paper OTC 20117.