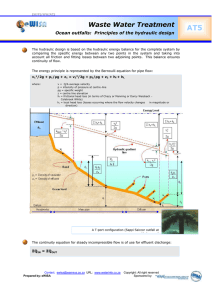
SAWE Paper No. 3430 Category No.25 SYSTEMS WEIGHT ESTIMATION ENHANCED METHOD FOR EARLY PROJECT PHASES Isabelle Banel-Caule, Mass Properties Engineer Airbus For Presentation at the 66th Annual Conference of Society of Allied Weight Engineers, Inc. Madrid, Spain, 26-31 May, 2007 Permission to publish this paper, in full or in part, with full credit to the author and the Society may be obtained, by request, to : Society of Allied Weight Engineers, Inc. P.O. Box 60024, Terminal Annex Los Angeles, CA 90060 The Society is not responsible for statements or opinions in papers or discussions at the meeting. Abstract From the beginning, the A380 was identified as a challenge in many fields: market, configuration, performance, environment, costs... Many innovations in aircraft systems were studied for the A380 with the objective to reduce weight. An aircraft of such size benefits from any weight savings on the systems, hence new architectures and new technology investigations were encouraged. This approach is extended to subsequent AIRBUS aircraft programs. On a new aircraft, more and more different architectures and technologies are possible for a given system. Our objective is to identify the best possible configuration early in the project life cycle. The choice of the architecture and the technology is done following analysis of numerous key criteria: performances, reliability, cost, technical feasibility, mass… AIRBUS weight department is associated to systems department to perform the mass parameter analysis. Doing this supports the constant objective of aircraft weight reduction for better aircraft performance. In this context, it became apparent that our systems mass and centre of gravity estimation methods for early project phases should be improved in terms of sensitivity and accuracy. This would enable to make the right decision on systems architecture and technology more rapidly and therefore deliver a more mature configuration earlier in the aircraft project. Support from the Systems organization was solicited to develop rule based methods which reflect its existing sizing process and methodology. These methods accurately predict the mass of a system and provide the correct sensitivity to key design parameters in all early project phases. They enable the assessment of the impact of different architectures and technologies on mass and allow rapid weight estimation of various configurations from the earliest project phases, reinforcing the position of mass as a key parameter for systems configuration and architecture choice. This paper describes the generic process used to develop these methods. The process is applied to the hydraulics systems for more concrete understanding. Finally, use cases are presented to illustrate which type of studies can be carried out. It will be demonstrated how the evolution of the aircraft geometry will affect the mass of the hydraulic system, followed by a comparison of the mass of two different flight controls configurations. They provide clear examples of the sensitivity studies that can be carried out with these methods to obtain better systems, and even aircraft configuration selection, at an earlier stage. -Page 2 - Table of Content Nomenclature ...........................................................................................................................4 1 Introduction .......................................................................................................................5 2 System enhanced weight estimation – Process................................................................6 2.1 Knowledge Capture ...................................................................................................6 2.2 Modeling of the system sizing method, for mass purpose .........................................7 2.3 Extension to all early project phases .........................................................................7 2.4 Validation ...................................................................................................................8 3 Enhanced weight estimation method for hydraulic system ...............................................9 3.1 Identification of the components ................................................................................9 3.2 Identification of the sizing parameters .....................................................................10 3.3 Method modeling .....................................................................................................14 3.4 Method calibration....................................................................................................14 3.5 Extension to all early project phases .......................................................................16 3.6 Validation .................................................................................................................18 3.7 Limits........................................................................................................................20 4 Use cases .......................................................................................................................21 4.1 Use case 1 – Aircraft geometry change...................................................................21 4.2 Use case 2 – Two system architecture comparison ................................................23 5 Conclusion ......................................................................................................................27 -Page 3 - Nomenclature HP LP HTP VTP THS EDP EHA EBHA EMA RAT OEW High Pressure Low Pressure Horizontal TailPlane Vertical TailPlane Trimmable Horizontal Tailplane Engine Driven Pump Electro Hydraulic Actuator Electrical Back-up Hydraulic Actuator Electro-Mechanical Actuator Ram Air Turbine Operating Empty Weight -Page 4 - 1 Introduction Until A380 programme, the weight estimation method enhancement mainly focused on the structural part of the aircraft because it represents around 60% of the aircraft Operating Empty Weight. Many efforts being carried out to lighten the structure (new materials like composite, new structural concepts…), it was a high priority to integrate the weight impact of such new technologies and concepts in our weight estimation methods. The weight of the other components of the aircraft (systems, engines, furnishings and operators items) was estimated with empirical methods, their precision is around 3% on the total aircraft weight. It was sufficient in the early project phases of new aircraft development for the optimization of aircraft performance. Weight repartition of the OWE :HLJKWUHSDUWLWLRQRIWKH2(: Operators Items Furnishings Systems 15% 25% Engine Systems Power Units 60% Structure Figure 1: Weight repartition of the OEW Nevertheless, a few years ago, many innovations in aircraft systems were studied for the A380 with the objective to reduce weight. An aircraft of such size benefits from any weight savings on the systems; hence new architectures and new technologies investigations were encouraged. This trend is extended to subsequent AIRBUS aircraft programs. On a new aircraft, more and more different architectures and technologies are possible for a given system. Our objective is to identify the best possible configuration early in the project life cycle. The choice of the architecture and the technology is done following analysis of numerous key criteria: performances, reliability, cost, technical feasibility, mass… AIRBUS weight department is associated to systems department to perform the mass parameter analysis. Doing this supports the constant objective of aircraft weight reduction in frame of better aircraft performance. In this context, it became apparent that our systems mass and centre of gravity estimation methods for early project phases should be improved in terms of sensitivity and accuracy. This would enable to make the right decision on systems architecture and technology more rapidly and therefore deliver a more mature configuration earlier in the aircraft project. These systems weight estimation enhanced methods should answer to the following objectives: - To accurately predict weight of the systems, providing the right sensitivity of the key design parameters of the system on weight in all early project phases - To assess the weight impact of architecture and technology choices in all early project phases -Page 5 - To support system designers in weight estimation activity so that weight becomes a design driver earlier. - 2 System enhanced weight estimation – Process Four main phases in these methods development can be identified: - Knowledge Capture - Modeling of the system specialist sizing method for mass purpose - Extension of the method to all early project phases - Validation Process of the study Knowledge Capture Modelling of the sizing process, for mass purpose Extension to all early project phases Validation Figure 2: Process of the enhanced method development 2.1 Knowledge Capture The first step, the Knowledge Capture phase, is the key basis of these enhanced weight estimation methods. During this phase, the weight engineer consults several sources of information in order to: - Identify all the components of the studied system: The studied system is composed of several sub-components. Each sub-component has a specific role and specific properties to meet this role. It is mandatory to see the role of each sub-component to understand the possible impact of each change of technology and architecture. The weight engineer has to characterize each of these sub-components in terms of weight to focus on the heaviest ones. This does not mean that lightest elements will be neglected but deeper analysis should be performed on the heaviest ones for more efficiency of the weight estimation method. The most complex components are not always the heaviest ones: weight engineer should be aware of that and adjust his effort to the relative weight importance. - Understand the sizing process of each sub-component of the system and deduce the sizing parameters, in terms of weight, for each of them: The understanding of the sizing process will allow us to identify all the parameters linked to the design of the system. Some parameters have an influence on the weight, some others do not. The weight engineer has to identify the parameters of the first category. - Identify the existing and future technologies and architectures for this system, and their influence on the weight. As one of the objectives of these enhanced weight estimation methods is to allow weight comparison of different technical and architectural solutions for a given system on a new aircraft, the existing and future technologies and architectures should be -Page 6 - - identified. The way they act upon the weight should be captured. For future technologies, weight impact will be deduced from results of Research programs and tests as soon as they have been validated by the System organization. Collect and organize on various aircraft the values of these sizing parameters and the detailed weight breakdown of the system. This reference database will allow us to validate the importance and the influence of each parameter. It will be the basis of the calibration of the weight estimation method. Main sources of information are obviously the system designers and the system installation people. First ones are the competent people in terms of system design, sizing process, architectures and technologies. Second ones are the competent people for system installation problematic: routings definition, system installation technologies… As a result, the weight engineer spends a lot of time with them in this phase of the project to capture all needed information, i.e. through interviews of the system designers and system installations people by the weight engineer and study of documentation with their help. 2.2 Modeling of the system sizing method, for mass purpose The second step, the modeling of the system sizing method, for mass purpose, is the core of these enhanced weight estimation methods. The weight estimation method must be based on the system sizing process used by the system designers to ensure the right influence of each sizing parameter. It is essential knowing that a key quality index of the method is its sensitivity: the ability to give the right weight impact of any change on the system. The weight engineer should keep in mind that the aim of the system weight estimation method is not to perform the system sizing itself but ‘only’ to estimate its weight. So the development of the method can not be limited to the modeling of the system sizing process. It should be derived to answer to the weight estimation need. During this phase the weight engineer has to make the link between the weight and the sizing parameters. The values of some parameters are available in all or in the latest early project phases. Where values of the parameters are not available, they should be estimated from data available in early project phase or assumptions should be made. This is to ensure that the method will be usable in the targeted scope. But these assumptions may introduce errors, which are compensated by the calibration of the method. The method developed, based on the assumptions, is applied on a set of existing AIRBUS aircraft. For this set, the estimated weight result is then compared to real weight. The difference between both weights should be consistent for the whole set of AIRBUS aircraft. If not, it shows that there is mismatch in the method: sizing parameter forgotten, influence of a sizing parameter not properly included in the method. As a consequence the method should be revised, where support from system designers and system installation people may be required. When consistency is obtained, the weight difference determines the calibration coefficient. The calibration coefficient is introduced in the method, where it is applied to the resulting estimated weight making it more representative of the real weight. 2.3 Extension to all early project phases The weight estimation method is usable for the late stages of the early project phases, when most information is available. The method needs to be extended to all early project phases. Indeed the value of parameters may be unknown in the beginning of the early project phase, so they should be estimated. The weight engineer proceeds in three steps: - Identification of the availability phase for each parameter -Page 7 - - Identification of the sizing data for each missing parameter and their impact on the parameter value, these data should be available earlier than the parameter itself. This will lead to a parameter estimation method - Application of this parameter estimation method on existing AIRBUS aircraft, the parameter result is compared to the real value. Calibration can be done like for weight. Note : the input data used to estimate the parameters may be not yet available in the very earliest phases. In this case the necessary input data is estimated similar to the method described above based on the data that is indeed available. :HLJKWHVWLPDWLRQPHWKRG ODWHVWSKDVHV This leads to the creation of different levels of application of the method, depending on the early project phase and data available at the stage the method is used. 3DUDPHWHU 3DUDP 3DUDP 3DUDP 3DUDP 3DUDP 3DUDPHWHU 3DUDP … 3DUDP … … … … 3DUDPHWHUQ /HYHO /HYHO /HYHO /HYHO … Aircraft & System definition state Figure 3: Parameters estimation leading to different application levels 2.4 Validation The enhanced weight estimation method is then tested on a large set of existing aircraft for validation. The results of the method are compared to the real weight on these aircraft and precision is provided for each application level. If the results are not satisfying, the weight engineer comes back to the system designers and system installation team to identify with them that all the sizing parameters have been included and that their influence is properly integrated in the method. Feedback from system specialists is of high-value at this stage of the development to ensure that the method is in line with the real process and to make them feel confident in the use of the method for weight estimation. Above process is illustrated hereafter, on the hydraulic system. -Page 8 - 3 Enhanced weight estimation method for hydraulic system 3.1 Identification of the components The hydraulic system represents around 16% of the total mass of the systems, it is one of the most important systems in terms of weight. The hydraulic power is used to operate high power demand services on aircraft such as: - Flight controls - Landing gears and braking system - Cargo compartment doors - Electrical power in emergency - Thrust reversers LANDING GEARS AND BRAKES EMERGENCY ELECTRI CAL POW ER GENERATION CARGO DOORS THRUST REV ERSERS Figure 4: Usual hydraulic ‘consumers’ on an aircraft The hydraulic power is conveyed from the hydraulic power generation means to the hydraulic ‘consumers’ with a fluid. The hydraulic power is the result of the fluid flow rate and the fluid pressure. For segregation and safety reasons, the hydraulic system is composed of several hydraulic circuits, all hydraulic consumers are shared between these circuits. Each circuit is built on the same architecture and composed of the same components: a reserve of fluid is contained in an hydraulic reservoir, which allows to supply permanently hydraulic pumps. The pumps suck up this fluid through suction lines composed of hydraulic pipes. The pumps pressurize the fluid at a high pressure. The fluid is ejected from the pump to the hydraulic consumers. A quantity of fluid at high pressure can be stored in a pressure reservoir, called the accumulator, which damps pressure surges, delivery pulsations from the pumps and compensates for pump response. The fluid is conveyed to the consumers through High Pressure (HP) lines composed of hydraulic pipes. The fluid is depressurized through the consumer’s equipment (jack, hydraulic motors…), and thus provides the surface control deflection jack with the needed power (for example). Then the low pressurized fluid returns to the reservoir through Low Pressure (LP) or return lines in hydraulic pipes. Several pipes can be connected with a manifold, the pipes are equipped with many valves and filters for safety reasons. The pipes are connected together or to equipments with couplings, they are fixed to the structure with brackets. -Page 9 - reservoir EDP Suction line filter Electric pump return line Pressure line To hydraulic consumers From hydraulic consumers Flow direction Figure 5: Principle scheme of an hydraulic circuit – Identification of the components A study on the weight of these hydraulic components on existing AIRBUS aircraft allows us to identify the heaviest ones. hydraulic pipes+fluid couplings+brackets manifolds +filters+valves RAT misc equipments weight percentage 45% 24% 12% 10% 9% Figure 6: Average weight percentage of hydraulic system sub-components, compared to hydraulic system total weight on existing AIRBUS aircraft (A320, A340-300 and A340-500) We will illustrate the process described previously with the development of the system weight estimation method for the heaviest hydraulic sub-components, the filled hydraulic pipes. 3.2 Identification of the sizing parameters The weight of the hydraulic pipes is obviously the product of the pipes length and the pipes linear weight. PipesWeigh t Length u LinearWeig ht Length: The hydraulic pipes connect the hydraulic equipments together and convey the hydraulic power from the hydraulic generation means to the hydraulic consumers. These routings depend on the position of hydraulic equipments and hydraulic consumers and on the architecture of the hydraulic system: - on A320 and A340 family aircraft, there is a centralized architecture (hydraulic reservoir and High Pressure manifold in centre fuselage: pipes routing from center fuselage (hydraulic reservoir) to engines (pumps) and back to center fuselage (HP manifold) to be distributed in the aircraft to hydraulic consumers) - on A380 aircraft hydraulic architecture is decentralized (hydraulic reservoir in pylons and High Pressure manifold in wing: pipes routing from pylons (hydraulic reservoir) to -Page 10 - engines (pumps) and back to wing (HP manifold) to be distributed in the aircraft to hydraulic consumers) - others decentralized architectures can be investigated. One can easily understand that A380 decentralized architecture leads to shorter pipes routings. In current state of method, only first architecture is taken into account, decentralized architectures are under investigation for integration in the method. The exact length of the hydraulic pipes is not known in early project phase because the exact routings are not defined. Final routings may be complex, as shown on the below picture of A340-500. Figure 6: Complex hydraulic routings in A340-500 fuselage center section One of the reasons of this complexity is that some hydraulic pipes need to go around equipment. Figure 7: Hydraulic pipe deviated from its nominal routing due to presence of equipment. -Page 11 - These exact routings will be defined in late development phases of the aircraft by system installation teams. So lengths values can not be known but only estimated following nominal routings (straight routings not deviated by the installation of equipments). Figure 8: Example of hydraulic nominal routings Linear Weight: The linear weight is a linear function of the section, for every material and type of pipes : m l P uS Where m is the linear mass of the tube including the fluid. l P is the density of the pipe including its fluid S is the section of the tube including its fluid. This physical statement is confirmed by the specifications, for filled hydraulic pipes: the linear weight is proportional to the filled pipes section for a given material and a given nominal high pressure as illustrated in Figure 9, extracted from hydraulic pipes specifications. linear weight tube+fluid TUBE HP Titanium 3000 psi 900 800 700 600 500 400 300 200 100 0 0 100 200 300 400 500 section (tube+fluid) Figure 9: Pipe linear weight is a linear function of the section -Page 12 - 600 3LSHIOXLGVHFWLRQ 3LSHV/LQHDU ZHLJKW 0DWHULD O +3 Figure 10: Sizing parameters of the pipes linear weight The material is determined by the hydraulic line type (High Pressure line or Low Pressure return line) and environmental conditions of the aircraft zone where the hydraulic pipes run through (ex: HP pipes installed in high temperature zones are in Stainless steel). The definition of these zones is similar for all aircraft programs, depending on the engines position, so they are known in early project phases. The nominal High Pressure is technical data linked to the hydraulic system, whose choice can be submitted to weight comparison from early project phases. The filled pipe section (pipe + fluid) is a result of the hydraulic system sizing process. Pipe + fluid section: The pipe+fluid section is a function of the fluid section and the pipe thickness. 3LSH )OXLG Figure 11: Pipe cross-section The pipe thickness is a linear function of the fluid section for a given nominal HP, which is defined by the hydraulic pipe specifications. Thus the pipe + fluid section is determined by the fluid section and the HP. Fluid section: The flow rate physical definition is: FlowRate FluidSecti on u FluidSpeed This means that: FluidSecti on FlowRate FluidSpeed The fluid speed value is constant in LP pipes and in HP pipes on all AIRBUS aircraft. It is specified by regulation rules and hydraulic system performances objectives. Thus the fluid section is a linear function of the flow rate in the hydraulic pipes. -Page 13 - The identification of the sizing parameters for the hydraulic pipes is summarized in the diagram below. Final sizing parameters appear in italic. 3DUDPHWHUV ವ OHQJWK Pipes routing ವ OLQHDUZHLJKW Material Pressure Pipe+fluid section Flow rate Fluid section Pressure Pipe thickness 3.3 Method modeling Pipes are used to convey the hydraulic power from the generation to the hydraulic consumers. The hydraulic system is designed from the power demand of the hydraulic consumers. This power demand can be expressed for each consumer by: Power 'P u Qmax where Qmax is the maximum flow rate of the consumer. 'P is the difference of pressure between the hydraulic inlet and outlet of the consumer. The difference of pressure between the hydraulic inlet and outlet of the consumer is the result of the nominal High Pressure of the hydraulic system and the pressure drop in the pipes. Indeed the curves in the hydraulic installation and the length of the pipes decrease the pressure. The hydraulic system is sized so that pressure drop between the generation means and the hydraulic end-user is limited to a maximum value. So pressure drop is not modeled in the method but its effect is integrated via the method calibration. 3.4 Method calibration The application scope of the hydraulic system method, leads to some assumptions: pipes estimated lengths instead of real lengths, pressure drop in pipes not modeled, HP and LP lines using the same routings. Effect of these hypotheses on weight is compensated by calibration. This calibration is illustrated below with the hydraulic pipes installed in the rear part of the fuselage (from the end of the center wing box to the tailcone, HTP and VTP included) on a set of AIRBUS aircraft. The pipes in the rear section of the fuselage supply the hydraulic consumers located in this section of the aircraft: the rudder hydraulic actuators the elevators hydraulic actuators the Trimmable Horizontal Stabiliser hydraulic actuators the aft cargo door hydraulic actuator -Page 14 - There is not a pipe for each consumer going from the generation to the consumer: for each circuit a common pipe goes from the generation to a meeting point (represented by a manifold) where it splits to supply different consumers. So we distinguish two “types” of pipes: - The pipes dedicated to a consumer: between the meeting point and the consumer - The common pipes: upstream from the meeting point The below scheme shows the example of the hydraulic distribution of the aft fuselage consumers for an AIRBUS Long Range aircraft: for instance, the green pipe carries the hydraulic power in the cylindrical part of the fuselage, then it splits to supply the different actuators (cargo door, rudder, Trimmable Horizontal Stabilizer (THS), elevators). Rudder actuator 1 <HOORZFLUFXLW *UHHQFLUFXLW Rudder actuator 2 %OXHFLUFXLW Rudder actuator 3 Right elevator actuator 1 Aft cargo door actuator Right elevator actuator 2 THS motor 1 THS motor 2 Left elevator actuator 1 Left levator actuator 2 Blue circuit common pipes Blue circuit Meeting point (manifold) Figure 12: Hydraulic system architecture in rear fuselage The method described in previous paragraph is applied on all the pipes (dedicated pipes and common pipes) on the whole rear fuselage section. Calibration is done on a set of AIRBUS aircraft, homogeneous in term of nominal High Pressure and pipes material configuration. -Page 15 - The result of subsequent method modeling & calibration is presented in the diagram below: total hydraulic aft fuselage real weight TOTAL HYDRAULIC PIPES - REAR FUSELAGE 350 $ 300 250 $ 200 150 $ $ 100 50 $IDPLO\ 0 0 5000 10000 15000 20000 25000 30000 sum of the flow rate*length*number of actuators for all consumers Figure 13: Hydraulic pipes calibration The good correlation between the product (pipes length x flow rate x number of actuators) and the pipes real weight proves that all the sizing parameters have been identified and that their influence on weight is properly modeled in the method. This method allows us to calculate the impact of each hydraulic consumer on hydraulic pipes weight. Thus if a hydraulic consumer position is changed, the associated pipes length is also changed and thus the weight. If a hydraulic consumer is removed, the associated flow rate is null so the associated weight is null. This last sensitivity is of high value for power sources architecture comparison (see paragraph 4.3, Use case 2) Influence of the nominal High pressure value and the pipes material configuration are modeled following the same approach: physical modeling followed by calibration. 3.5 Extension to all early project phases Value of some parameters used in the above weight estimation method, like the flow rates, are not available in the very early project phases. So when missing, they are estimated from data available in these project phases. This step will be illustrated below on the primary flight controls actuators flow rate example. Similar methods were developed for the other parameters. The maximum power supplied to the actuator (PowerSupplied) is the product of the difference of pressure between the hydraulic inlet and outlet of the consumer and the consumer maximum flow rate. The hydraulic system is sized so that pressure drop between the generation means and the hydraulic end-user is limited to a maximum value. So the nominal High Pressure will replace the delta pressure in the modeling. PowerSuppl ied Pr essure u FlowRate -Page 16 - The maximum power needed by the actuator (PowerNeeded) is sized by the maximum hinge moment, the control surface actuator has to support and the maximum control surface deflection speed, PowerNeede d HingeMomen t u Speed When the hydraulic system is optimized: PowerSuppl ied PowerNeede d HingeMoment u Speed FlowRate Pr essure Maximum flow rates real values are represented as a function of the product (maximum hinge moment x maximum deflection speed / HP) for a set of existing AIRBUS aircraft Real flow rate value FLOW RATE estimation Elevator Rudder Spoiler Aileron Max hinge moment x Max deflection speed / HP Figure14: Flow rate calibration The flow rate can thus be estimated from other parameters. When the values of these parameters are not available, they can also be estimated or hypotheses are taken. For instance, the maximum hinge moment can be estimated from control surface aerodynamic coefficients, for which advanced estimation methods exist, usable from the earliest phases of an aircraft project. The maximum deflection speed is usually constant for a given flight control surface, so when unknown, value of previous aircraft can be taken. Thus the estimated weight result is strongly linked to the hypotheses taken. Change of hypotheses may have an impact on weight. This allows us to do comparison between different sets of hypotheses and improve the weight results when the hypotheses become closer to the final aircraft definition. These series of parameters estimations lead to different levels of application of the method, each one being adapted to the maturity of the aircraft definition. -Page 17 - PHWKRG 3LSHV:HLJKWHVWLPDWLRQ 3LSHV:HLJKWHVWLPDWLRQP HWKRG ODWHVWSKDVHV 5RXWLQJ $&JHRPHWU\ $&JHRPHWU\ $HUR FRHIILFLHQWV +LQJH + LQJH PRPHQW )ORZUDWH 'HI OHFWLRQ V S HHG VSHHG 3LSHPDWHULDO +3 +3 /HYHO /HYHO /HYHO /HYHO Aircraft & System definition state Figure 15: Hydraulic system method – how the different application levels are set 3.6 Validation The method is developed for the whole hydraulic system following the same process. Hydraulic system enhanced weight estimation method has four different application levels: Feasibility phase Concept pha se Definition phase Development phase 2, hydraulic system’s top level specifications 49, Aircraft top level specifications Level 4 Less hypotheses on the system architecture More input about the system Busine ss opportunity pha se 19, hydraulic system’s specifications 51, Aircraft top level specifications Level 3 37, hydraulic system’s specifications 46, Aircraft top level specifications Level 2 Level L evel 1 71, system’s specifications 49, Aircraft top level specifications Aircraft & System definition state Figure 16: Hydraulic system method application levels -Page 18 - The method is then validated on its four application levels on a set of aircraft, which should be larger that the set of aircraft used for the calibration of the method. Some results are presented below. Validation results REAL WEIGHT weight Level 4 Level 3 Level 2 r de Co n co 80 A3 00 405 A3 A3 403 00 00 302 A3 A3 211 00 Level 1 The results on the AIRBUS aircraft from A310 to A340-500 highlights that the method provides good results in term of precision (less than 5% from level 4 (low number of input) to level 1) and that this precision becomes better when more inputs are integrated. A321: Precision on A321-100 at level 4, 15%, is above the average value. This is explained by the by-default hydraulic generation architecture implemented in the method, which does not correspond to the A320 hydraulic generation architecture. This difference has big impact on the weight of the hydraulic generation pipes, which are sized by this architecture through the flow rate the generation means produce. On level 4, the hydraulic generation architecture is not given as an input. However, from level 3 it is actually provided as an input, precision is improved to 5% to 2%, this illustrates the right sensitivity of the method to the hydraulic generation architecture. Concorde: Only levels 4 and 3 could be tested on Concorde because some information, like the flow rate of each hydraulic consumer were missing at the time of the study. Results are below 10%. It is good given the unconventional configuration of the Concorde: Hydraulic High Pressure is 4000psi whereas usual one is 3000psi (except A380 5000psi), some hydraulic consumers are specific to Concorde: elevators and ailerons are replaced by only 2 “elevons” controlling pitch and roll axis, moving nose and visor are moved by hydraulic actuators… Despite these specificities, results on Concorde are very good because method allows to integrate the hydraulic architecture of Concorde in the input file and calculates weight impact from real sizing parameters. This highlights the flexibility of the method in term of architecture and its right sensitivity. A380: Sensibilities of the method to hydraulic system and consumers architecture is well illustrated on A380. Indeed A380 has important differences compared to existing aircraft: size. Higher pressure is applied for weight decrease, double power sources (2 hydraulic circuits and 2 electrical circuits) instead of full hydraulic power to supply power to high power consumers like flight controls actuators… From level 4 already High Pressure value is taken into account, providing already better weight estimation than correlation law based on previous aircraft (precision improved by 40%). On level 4, all high power consumers are supposed to be hydraulically actuated, -Page 19 - leading to the important overestimation of the hydraulic system weight. Then from level 3 the double power architecture is taken into account: source of power is identified for all consumers: as in reality some high power consumers, like flight control actuators, are electrically powered instead of hydraulically. Modeling is thus more representative of the reality and thus the weight estimation is better. Results improvements on next levels 2 and 1 are due to better knowledge on inputs (flow rates are given instead of estimated…). However one can notice that weight estimation remains heavier than real weight: it is explained by the hydraulic architecture implemented in the method, which is the A320/340type centralized architecture. A380 decentralized architecture leads to weight savings, but as this architecture is not integrated in the method yet, this weight saving is not highlighted in the results. Nevertheless this type of decentralized architecture is under investigation for integration in next version of the method (see §3.2). 3.7 Limits This enhanced weight estimation method on hydraulic system allows us to accurately predict the weight of the hydraulic system taking into account the sensitivity of the key design parameters. Indeed the precision lies between 2-10% depending on the level of inputs. The 2% remaining error on the most detailed level of inputs is mainly linked to the approximations done on the routings (straight routings instead of real routings), on the pipes materials (same material in the method in all aircraft areas whereas different ones on real aircraft) and on the pressure drop modeling. The main sizing parameters like the number of hydraulic circuits, the system hydraulic pressure, the hydraulic flow rate of each consumer, the length and material of the pipes, are integrated in the weight calculation to reflect their real impact on weight. The value of these parameters is defined by the hydraulic system architecture (eg. number of circuits, centralized/decentralized), by the consumers architecture (eg. Electrical or Hydraulic flight controls actuators), the aircraft configuration (eg. Routings of pipes) and the hydraulic system technology (eg. Hydraulic High Pressure value). Thus with this method it is possible in early project phase to compare very quickly in term of weight low vs high-pressure architecture, different hydraulic generation architectures (number and power of hydraulic pumps, number of circuits…). Combined with similar methods on other systems like electrical system, it becomes possible to compare more or less electrical aircraft. The More Electrical Aircraft represents many advantages in terms of reliability, monitoring, … weight impact on such promising configuration can be assessed. The use of this method is integrated in an overall architecture and technology assessment of hydraulic system and, combined with similar ones on other systems, of a group of system. Weight is a parameter among others like safety, performances, reliability, maintenance… Estimated quickly and accurately, this parameter has strong influence on architecture and technology choice. This method is constantly improved by integration of new technologies or architectures to follow and participate to constant evolution of the systems. -Page 20 - 4 Use cases 4.1 Use case 1 – Aircraft geometry change Problematic: Hydraulic system total weight includes the weight of hydraulic system installation (pipes, connectors, brackets…). The system installation weight fully depends on the length of the pipes. And this length is directly linked to the aircraft geometry. This study will illustrate the sensitivity of the weight estimation method to the aircraft geometry. Description of the study: In this example, we will compare two aircraft with different fuselage lengths. All other parameters will be kept constant: - same fuselage width and height - same wing and tails geometry definition - similar A/C top level specifications (MTOW difference <2%, same characteristics speeds) - same hydraulic system specifications - same Hydraulic generation architecture (high pressure, number/techno/flow rate of pumps, RAT technology) - same pipes material - same hydraulic consumers (number, position and flow rate) Two existing AIRBUS aircraft answering to the above constraints (different fuselage length, all other parameters being identical) have been selected. Hydraulic system real weight for both aircraft will be extracted from AIRBUS weight database to provide the real weight impact of a fuselage length difference. The weight estimation method will be applied on both aircraft. The result will be compared to the real weight, to check that the sensitivity to length is representative of the reality. The aircraft selected in the frame of this study are two long range aircraft: P A340-500: P P A340-600: P P P Figure 17: Fuselage length increase description -Page 21 - Compared to A340-500, A340-600 has fuselage length increase of: - 5,3 m on the forward fuselage part - 2,2 m on the rear fuselage part in this study, weight enhanced estimation method for hydraulic system was used at level 1 (high level of information available) to estimate the weight impact of this fuselage length increase. Nevertheless this study can be achieved from level 1 to 4. At level 1 main inputs are: - A/C geometry - Architecture and technology of flight controls - Hydraulic generation’s and hydraulic consumers’ flow rates - Hydraulic generation architecture The flight controls architecture and their power requirements used for this study are the ones of A340-500 aircraft, with full hydraulic power (3 hydraulic circuits). Results: Results of the hydraulic system method are presented on the below table, for both aircraft geometry. Delta weight from A340-500 to A340-600 + 28 kg Real weight +1,3% + 30 kg Estimated weight +1,3% The 1.3% weight increase observed on the real aircraft is correctly estimated by the method. Sensibility to the fuselage length is right. The fuselage length increase is +7.5m, on 67m so it is around +11%. +11% on fuselage length Î +1.3% on hydraulic system weight This weight increase of +1.3% only for +11% fuselage length increase can be checked quickly by a simple analysis: The generation part of the hydraulic system represents around 60% of the hydraulic system total weight. The hydraulic generation is located in the wing and the center fuselage compartment. In our study, the wing and the center fuselage geometry are kept constant. So on the hydraulic generation is not impacted by this geometry evolution and its weight is kept constant. So only the distribution part, 40% of the hydraulic system, is impacted by this geometry evolution. The distribution part is composed of 10% of equipment, which are not impacted by this geometry change. The system installation, 90% of the hydraulic distribution, is composed of 45% of system installation installed in the wing, the center fuselage and the tails, which are not impacted by the studied fuselage geometry. The remaining 55% correspond to the system installation installed in the rear and forward fuselage; they are the only item impacted by the studied fuselage geometry change. -Page 22 - +\GUDXOLFV\VWHP *HQHUDWLRQ 'LVWULEXWLRQ (TXLSPHQWV 6\VWHP,QVWDOODWLRQ )RUZDUGDQGUHDU IXVHODJHV\VWHP LQVWDOODWLRQ :LQJWDLOVDQG FHQWUHIXVHODJH V\VWHP LQVWDOODWLRQ Thus the forward and rear fuselage system installation represents 20% of the total hydraulic system weight (55%x90%x40%). As demonstrated in previous paragraph 3.2, the system installation weight is proportional to the length of the pipes. A fuselage length increase of 11% impacts only these 20% of total hydraulic system weight. So we can deduce roughly that the 11% fuselage length increase increases the total hydraulic system weight of 2% (11% x 20%). This 2% weight increase is in the same order of magnitude as the +1.3% found by the method. It confirms the sensitivity of the method to the fuselage geometry. 4.2 Use case 2 – Two system architecture comparison Problematic: On A380, it is the first time that two different types of sources of power, hydraulic and electric, are used to provide power to high power consumers (landing gears and flight controls), instead of only one, hydraulic, like on all previous AIRBUS aircraft. As this power architecture lead to important weight savings on A380, it is further investigated for future AIRBUS programs. On the one hand, in full hydraulic power configuration, landing gears and flight controls actuators are actuated by servo-controls (actuator electrically controlled and hydraulically powered). Hydraulic power is the only high power source, hydraulic pipes connect all servocontrols to the hydraulic generation. On the other hand, in double power sources configuration (electric + hydraulic), different technologies of actuators can be used: - Servo-control: hydraulically powered actuator. Servo-control is power-supplied with hydraulic pipes. - EHA: electrically powered actuator. EHA is heavier than a servo-control for the same performances. EHA is power-supplied with electrical cables. - EBHA: hydraulically powered actuator in Normal mode, electrically powered actuator in Back up mode EBHA is heavier than a servo-control for the same performances. EBHA is power-supplied with electrical cables and hydraulic pipes. It has redundant power sources. - EMA: electrically powered actuator. EMA is heavier than a servo-control for the same performances EMA is power-supplied with electrical cables (no hydraulic pipe). From a full hydraulic configuration to a double power configuration there is: -Page 23 - - Weight increase of the actuators (EHA, EBHA, EMA being heavier than servocontrols) - Weight decrease of hydraulic pipes (for full electrically powered actuators hydraulic pipes are deleted) - Weight increase of electrical cables (suppressed hydraulic pipes are replaced by electrical cables) So final weight evolution of the aircraft is not obvious. Weight estimation enhanced methods developed on hydraulic system, Flight controls and electrical system allow to estimate the final weight impact. Lighter architecture can be identified. Description of the study: In this example, we will compare a full hydraulic configuration and a double power sources configuration for an A320-type aircraft. We focus on the weight evolutions of the flight controls, the hydraulic system and the electrical distribution. But it should be kept in mind that electrical generation may be impacted by increase of electrical power needs for more electrical configuration. Full hydraulic configuration: - 3 hydraulic circuits (3H) - A320 pipe material configuration - HP = 3000 psi - Hydraulic RAT - Slats and Flaps hydraulic motors - Flight controls architecture: (5 Î 1) SPOILERS G Y B Y SPOILERS (1 Î 5) G G Y B Y G L/H AILERON G R/H AILERON B B G THSA RUDDER Left Engine EMP or R AT G B G BLUE Hydraulic system G Right Engine Y Y L/H ELEVATOR GREEN Hydraulic system Y G B R/H ELEVATOR B Y B YELLOW Hydraulic system SC, Hydraulic ServoControl Figure 18: 3H - Full hydraulic configuration Double power sources configurations: - 2 hydraulic circuits and 2 electric circuits (2H/2E) - A320 pipe material configuration - HP = 3000 psi - Electrical RAT - Slats and Flaps hybrid motors (hydraulic/electric) - Flight controls architecture: Different combinations of the three actuator technologies can be studied to find the best in term of performances, reliability, costs and … weight. In this example we will study 2 different ones: -Page 24 - Configuration 2H/2E – 1: EBHA for 2 spoilers (5 Î 1) SPOILERS G L/H AILERON G Y Y E1 Y SPOILERS (1 Î 5) G G Y Y E1 Y G R/H AILERON E1 E1 G THSA RUDDER Left Engine RAT G Em GREEN Electrical Right Engine E1 G E2 Y Y L/H ELEVATOR Hydraulic system G R/H ELEVATOR E1 YELLOW Hydraulic system E1 Y E1 SC, Hydraulic ServoControl EHA , Electro-Hydrostatic Actuator EBHA, Electrical Backup Hydraulic Actuator EMA , E lect ro M echanical Actuator Figure 19: Conf 2H/2E–1 – Double power configuration with EBHA for 2 spoilers Configuration 2H/2E – 2: same as Configuration 2H/2E – 1 except that spoilers EBHA are replaced by EMA. SPOILERS (1 Î 5) (5 Î 1) SPOILERS G Y E1 Y G G Y E1 Y G L/H AILERON G R/H AILERON E1 E1 G THSA P3 Left Engine RAT G Em S3 E1 RUDDER S2 G E2 Y L/H ELEVATOR GREEN P2 G E1 Y R/H ELEVATOR Electrical Hydraulic system Right Engine E1 Y E1 YELLOW Hydraulic system SC, Hydraulic ServoControl EHA , Electro-Hydrostatic Actuator EMA , Electro M echanical Actuator Figure 20: Conf 2H/2E–2 – Double power configuration with EMA for 2 spoilers Weight enhanced estimation methods for flight controls, hydraulic system and electric distribution were used at level 1 to compare these three configurations. Nevertheless this study can be achieved from level 1 to 3. At level 1 main inputs are: - A/C geometry - Control surfaces hinge moments - Hydraulic generation’s and hydraulic consumers’ flow rates - Hydraulic generation architecture - Architecture and technology of flight controls -Page 25 - Results: Results of the method are presented on the below table, 2H/2H configurations results are presented as delta weights versus 3H configuration. 2H ATA EBHA for 2 spoilers Weight delta / 3H Contents EMA for 2 spoilers Weight delta / 3H ATA27 PFCS Primary flight controls Actuators & Installations +7,2% Hydraulic distribution Electric distribution ATA27 HLS High Lift System - Slats & Flaps ATA29 Hydraulic Power Generation Distribution RAT Auxiliary Generation (hydraulic RAT replaced by electrical RAT) Results at aircraft level: +0,4% +37% +25% -46% +2% -46% +2% +78% +78% -24% -24% -18% -34% -2% -18% -34% -2% -1% -3% This study highlights that on an A320-type aircraft, 2H/2E configurations are lighter for the group of system flight controls, hydraulic and electrical systems. The configuration 1 with EBHA on 2 spoilers leads to 1% weight saving, whereas the configuration 2 with EMA on 2 spoilers leads to 3% weight saving. This means that the weight increase of the actuators and the additional electrical cables are compensated by the suppression of some hydraulic pipes. This study should be completed by a weight study on electrical generation, which may be impacted by increase of electrical power needs for more electrical configuration. -Page 26 - 5 Conclusion These systems weight estimation enhanced methods, developed in collaboration with System organization, ensures the continuity of the system weight estimation from the earliest project phases to the pre-development phases. Quick weight estimations can be performed from the earliest project phases, based on the sizing process used later on by the System organization. System designers feedback on these methods is very positive, they use it for future AIRBUS aircraft and are willing to enrich these methods with new technologies and architectures. The use of these methods is integrated in an overall architecture and technology assessment of a system or a group of system. As systems have strong relationships, optimization should be done globally on interdependent systems and not on each system individually. These methods allow this global optimization. Weight is a parameter among others like safety, performances, reliability, maintenance… Estimated quickly and accurately, weight has strong influence on architecture and technology choice. These methods are currently expanded for Centre of gravity and Mass distribution calculation, this to answer a growing need for automatic computation of Mass Distribution from the earliest project phases and a better knowledge of A/C Centre of Gravity position, which has a strong impact on A/C performances. -Page 27 - BIOGRAPHY Isabelle BANEL-CAULE has an engineering degree from a French aeronautical university, ENSICA, in Toulouse. She joined AIRBUS after graduation in 2002 where she is working as weight engineer on weight estimation methods development and on A400M weight control. -Page 28 -