This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
IEEE JOURNAL OF SOLID-STATE CIRCUITS
1
A Second-Order Noise-Shaping SAR ADC With
Passive Integrator and Tri-Level Voting
Haoyu Zhuang , Wenjuan Guo , Jiaxin Liu , Member, IEEE, He Tang , Member, IEEE, Zhangming Zhu ,
Long Chen , Student Member, IEEE, and Nan Sun, Senior Member, IEEE
Abstract— This paper presents a low-power and scalingfriendly noise-shaping (NS) SAR ADC. Instead of using operational transconductance amplifiers that are power hungry
and scaling unfriendly, the proposed architecture uses passive
switches and capacitors to perform residue integration and
realizes the path gains via transistor size ratios inside a multipath dynamic comparator. The overall architecture is simple and
robust. Since the noise transfer function is set by component
ratios, it is insensitive to process, voltage, and temperature (PVT)
variations. Besides the proposed architecture, this paper also
presents two new circuit techniques. A tri-level voting scheme
is proposed to reduce the comparator noise. It outperforms the
majority voting technique by exploiting more information in the
comparator output statistics and providing an extra decision
level. A dynamic multi-phase clock generator is also proposed to
guarantee non-overlapping and support an arbitrary number of
phases. A prototype 9-bit NS-SAR ADC is fabricated in a 40-nm
CMOS process. It consumes 143 µW at 1.1 V while operating at
8.4 MS/s. Taking advantage of the second-order NS, it achieves
a peak SNDR of 78.4 dB over a bandwidth of 262 kHz at the
oversampling ratio of 16, leading to an SNDR-based Schreier
figure of merit (FoM) of 171 dB.
Index Terms— Analog-to-digital converter, majority voting
(MV), multi-phase non-overlapping clock generator, noise shaping (NS), successive approximation register.
I. I NTRODUCTION
S
AR ADC is a power-efficient architecture for mediumresolution applications. It is also simple to design, mostly
digital, and scaling friendly. However, for high-resolution
Manuscript received May 21, 2018; revised August 28, 2018 and
December 13, 2018; accepted February 10, 2019. This work was supported in
part by NSF under Grant 1254459, Grant 1509767, and Grant 1527320. This
paper was approved by Associate Editor Andrea Baschirotto. (Corresponding
author: Haoyu Zhuang.)
H. Zhuang is with the School of Electronic Science and Engineering,
University of Electronic Science and Technology of China, Chengdu 611731,
China, and also with the Department of Electrical and Computer Engineering, The University of Texas at Austin, Austin, TX 78712 USA (e-mail:
hyzhuang@uestc.edu.cn).
W. Guo, L. Chen, and N. Sun are with the Department of Electrical
and Computer Engineering, The University of Texas at Austin, Austin,
TX 78712 USA (e-mail: wjguo@utexas.edu; nansun@mail.utexas.edu).
J. Liu is with the Department of Electronic Engineering, Tsinghua University, Beijing 100084 China, and also with the Department of Electrical
and Computer Engineering, The University of Texas at Austin, Austin,
TX 78712 USA.
H. Tang is with the School of Electronic Science and Engineering, University of Electronic Science and Technology of China, Chengdu 611731,
China.
Z. Zhu is with the School of Microelectronics, Xidian University,
Xi’an 710126, China.
Color versions of one or more of the figures in this paper are available
online at http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/JSSC.2019.2900150
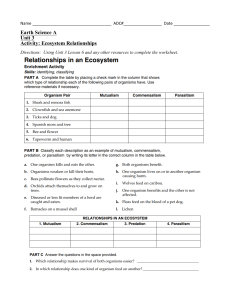
Fig. 1.
ADC.
Concept of NS SAR ADC. (a) Standard SAR ADC. (b) NS SAR
applications, its power efficiency degrades due to the tough
requirement on the comparator noise and the exponentially
growing capacitor DAC array. A widely used architecture for
high-resolution applications is the ADC. Taking advantage of oversampling and noise shaping (NS), it can reach
high resolution with a low-resolution quantizer and DAC.
Nevertheless, ADC usually requires high-performance
OTA-based active integrators, which are power hungry and
scaling unfriendly.
NS SAR ADC is an emerging hybrid ADC architecture
that aims to combine the benefits of both SAR and ADCs while simultaneously obviating their drawbacks [1]–[9].
Comparing to a classic SAR, the NS-SAR ADC can achieve
higher resolution by using NS. It relaxes the requirement on
the raw SAR quantizer resolution. Comparing to a classic
ADC with a low-resolution flash quantizer, the NS-SAR
has a higher quantizer resolution and, thus, can reduce the
oversampling ratio (OSR), leading to enlarged bandwidth
and/or reduced clock rate. In addition, it uses the same DAC
array for both quantization and feedback, which reduces the
circuit complexity. Furthermore, its conversion residue is small
and readily available after the SAR operation. This greatly
simplifies the design of the loop filter and relaxes the filter
linearity requirement, leading to significant power saving. The
limitation for the NS-SAR is that its SAR quantizer is slower
than a flash and, thus, is difficult to support a high sampling
rate (e.g., beyond 1 GS/s), but it is well suited for low-tomedium speed applications where power efficiency is a critical
consideration.
0018-9200 © 2019 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission.
See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
2
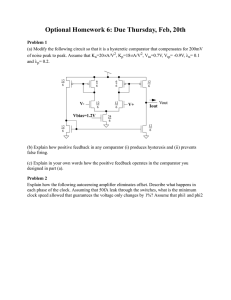
Fig. 2.
IEEE JOURNAL OF SOLID-STATE CIRCUITS
Proposed second-order passive NS-SAR architecture.
Fig. 1 shows the functional diagram of a standard SAR
ADC and a NS-SAR ADC. As can be seen, the only difference
between them is that an NS-SAR ADC uses a filter to further
process the conversion residue Vres and feeds the result to
the comparator. The function of the filter is the same as
that in ADCs, which is to memorize the residue and
subtract it from the next conversion cycle, thereby realizing
NS. There are different ways to realize the filter. Some prior
works use OTA to build active filters [1]–[3]. By using OTA,
good NS effect (i.e., aggressive noise transfer function) can
be achieved. However, OTA consumes high power and is
scaling unfriendly, requiring large device gain and supply
voltage. To save power and be more compatible to CMOS
scaling, the works in [4] and [5] choose to use dynamic
amplifiers instead of OTAs. Nevertheless, the gain of the
dynamic amplifier is sensitive to process, voltage, and temperature (PVT) variations. Digital background calibration can
be used to ensure PVT robustness as in [5], but it increases
the design complexity and takes time to converge. Recently,
several researchers propose to use switches and capacitors to
implement fully passive filters [6]–[8]. These passive switched
capacitor filters are simple, low power, robust, and scaling
friendly. Moreover, they are very well suited for low dutycycle sensor applications. Different from the OTA-based filter,
they do not consume any active power or require a stable
operating point. They can wake up immediately and do not
need any guard time for bias circuits to settle, which can
greatly save the overall system power. However, prior works
using passive filters have limited NS effect. Only first-order
NS is achieved in [6] and [7]. Although second-order shaping
is realized in [8], its SNDR is limited to only 65 dB because
of its mild noise transfer function.
To overcome the limitations of prior passive NS-SAR ADC
works, this paper proposes a novel NS-SAR architecture.
It adds only a few switches and capacitors to a standard
SAR ADC but can achieve second-order NS. It can also be
readily extended to even higher order shaping. Since passive
switched capacitor integrators do not provide gain by themselves, the required path gains are realized via transistor size
ratio inside a multi-path strong-arm latch-based comparator.
It is insensitive to PVT variations as its noise transfer function
is set by component ratios. Besides the proposed architecture,
this paper also presents two new circuit techniques. A tri-level
voting scheme is proposed to reduce the comparator noise.
It outperforms the majority voting (MV) technique in [10] by
exploiting more information in the comparator output statistics
and providing an extra decision level. A low-power multiphase clock generator is also proposed to guarantee nonoverlapping and allow an arbitrary number of clock phases.
To validate the proposed architecture and circuit techniques,
a prototype 9-bit NS-SAR ADC is fabricated in a 40-nm
CMOS process. It consumes 143 μW from a 1.1-V supply
while operating at 8.4 MS/s. Enabled by the second-order NS,
it achieves 78.4 dB of SNDR over the bandwidth of 262 kHz
at the OSR of 16, leading to an SNDR-based Schreier figure of
merit (FoM) of 171 dB.
This paper is an extension of [9]. It is organized as follows. Section II presents the proposed second-order NS-SAR
architecture, including its basic operation, various forms of
nonidealities, and PVT robustness. Section III discusses the
proposed tri-level voting technique. Section IV describes the
arbitrary-phase non-overlapping clock generator. Section V
shows the measurement results. Finally, Section VI concludes
this paper.
II. P ROPOSED S ECOND -O RDER PASSIVE NS-SAR ADC
A. Basic Operation
Fig. 2 shows the architecture of the proposed secondorder NS-SAR ADC. Although the real implementation is
fully differential, a single-ended version is shown here for
simplicity. The capacitive DAC is 9-bit with 1-bit redundancy.
Four switches and three capacitors are added to realize secondorder passive integration. The three-input-path comparator
adds up the DAC output Vres with the two integrator outs Vint1
and Vint2 .
The proposed ADC adopts a synchronous clocking scheme.
The external master clock clk is divided into 20 phases by
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
ZHUANG et al.: SECOND-ORDER NS SAR ADC WITH PASSIVE INTEGRATOR AND TRI-LEVEL VOTING
3
in Fig. 3. The comparator core is a strong-arm latch but is
modified to have three input pairs. By merging the drain
currents of the input pairs, the summation of the three voltages
is realized. Note that this summation is performed dynamically
instead of using a static analog adder. This reduces the circuit
complexity and power.
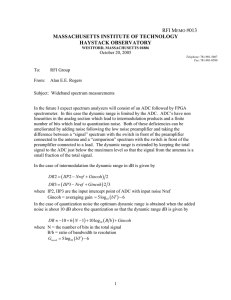
Because passive integrators do not provide voltage gain,
it is necessary for the comparator to provide gain for Vint1
and Vint2 in order to realize the desired noise transfer function
(see Section II-B). Note that only relative gains among Vres ,
Vint1 , and Vint2 are needed, as the comparator output is always
1 bit. As a result, the relative gains can be realized by sizing
the input pairs of the comparator into specific ratios as shown
in Fig. 3. No extra static amplifiers are needed, which also
simplifies the hardware and saves power.
Fig. 3.
Three-path dynamic comparator for weighted summation.
B. Signal Flow Diagram
a non-overlapping clock generator that will be presented in
Section IV. The first two clock cycles, φe , are used to sample
the input voltage Vin . Bottom-plate sampling is used to reduce
signal-dependent charge injection. The next nine cycles are
used for comparator decisions for the 8 MSB bits plus 1
redundant bit at 16C. The following eight cycles are used to
decide the last 2 LSB bits. To reduce the comparator noise and
improve the decision accuracy, the comparator is fired four
times for each LSB bit to perform tri-level voting. Unlike the
prior MV technique that always makes binary decisions and
quantizes the comparator input to ±1 LSB [10], the proposed
tri-level voting scheme adds an extra middle decision level.
That is, when the comparator decisions are evenly distributed
(i.e., 2 “1”s and 2 “0”s out of 4 repeated comparisons),
the comparator input is quantized to 0 and no update is made
to the DAC. With no additional cost in hardware or power,
the proposed tri-level voting scheme outperforms the MV
technique in [10] by making more use of the comparator
output statistics. More detailed explanations will be provided
in Section III. In the 20th clock cycle φout , the last bit decision
is fed back to the DAC to generate the final residual voltage
Vres . At the same time, a small capacitor Cres is connected
to the capacitive DAC to sample Vres . Afterward, when φns1
goes high, Cres shares charges with Cint1 to perform the first
passive integration. Then, when φns2 goes high, Cres shares
charges with Cint2 to realize the second integration. After the
integration finishes, Cres is reset during φrs and ready to sample
the next residue voltage. By contrast, Cint1 and Cint2 are never
reset, so that they memorize the integration results, which are
necessary for the NS. It is clear from Fig. 2 that φns1 and
φns2 happen during φe , and thus, they do not elongate the
overall conversion time. This implementation is advantageous
than prior NS-SAR works that add extra clock cycles at the
end [2], [5]–[7]. Comparing to a conventional SAR ADC,
the proposed NS-SAR requires only one extra clock cycle
φout to sample the conversion residue. Thus, the overall speed
penalty is small.
A key to realize the second-order NS is the summation of
Vres , Vint1 , and Vint2 during each comparison. This operation
is realized through the three-path dynamic comparator shown
Fig. 4 shows the signal flow diagram of the proposed
NS-SAR ADC, assuming CDAC = Cint1 = Cint2 = C and
Cres = ac/(1 − a). Vin (z) is the input voltage sampled onto
the capacitive DAC, Dout (z) is the ADC output, and thus,
the residual voltage is Vres (z) = Vin (z) − Dout (z). When φout
goes high, this residual voltage is sampled by Cres , making
the voltage on Cres to be (1 − a) · Vres (z). Then, when φns1
goes high, by combining the previous voltage Vint1 (z) · z −1 on
Cint1 with the present voltage (1 − a) · Vres (z) on Cres , a new
voltage Vint1 (z) is generated. Therefore,
a
Vint1 (z)
= (1 − a) ·
Vres (z)
1 − (1 − a)z −1
(1)
which is a first-order integration with a pole at (1 − a). When
φns2 goes high, similarly combining the voltage on Cint2 with
the voltage on Cres . Thus, we have
a2
Vint2 (z)
= (1 − a) ·
.
Vres (z)
[1 − (1 − a)z −1 ]2
(2)
Constituting a second-order integration with two poles at
(1 − a). Then, the previous Vint1 (z) · z −1 , Vint2 (z) · z −1 , and the
present Vin (z) are summed together by the three-path comparator. As can be seen from the integration equations, Vint1 and
Vint2 have gain loss, thus it is necessary to compensate this
gain loss by voltage gains g1 and g2 , which are embedded
inside the comparator.
Finally, through analog-to-digital conversion, this summation result of Vint1 , Vint2 , and Vin is converted into Dout (z) by
adding a quantization error Q(z). Using the signal flow diagram, one can obtain the complete z-domain transfer function
of the ADC
Dout (z)
= Vin (z)
+
[1−(1−a)z−1]2 · Q(z)
. (3)
1+(1−a)(g2a 2 +g1a −2)z−1 +(1−a)2(1−g1a)z−2
By setting g1 = 1/a and g2 = 1/a 2 , the overall transfer
function can be simplified to
Dout (z) = Vin (z) + [1 − (1 − a)z −1 ]2 · Q(z)
(4)
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
4
IEEE JOURNAL OF SOLID-STATE CIRCUITS
Fig. 4.
Signal flow diagram of the proposed second-order NS-SAR ADC.
Fig. 5.
Signal flow diagram with non-ideal effects.
which clearly shows the second-order NS. By examining the
signal flow diagram, we can see that the proposed NS-SAR
ADC maps to the cascade of integrators with feed-forward
(CIFF) architecture [11].
As shown in (4), the value of “a” determines the location
of the NTF zeros. A smaller “a” leads to stronger suppression
for the quantization noise, but it would result in a smaller
Cres capacitor and larger kT /C noise. The optimal value
of “a” depends on the target ADC performance and the
balance of this tradeoff. In the prototype ADC, as a proof
of concept, we choose its target SNDR of 80 dB at the OSR
of 16. To leave margin for other noise sources, we budget the
SQNR to be 90 dB, which translates to the 15-bit resolution.
The base SAR quantizer resolution is chosen to be 9 bit
due to its design simplicity. The OSR of 16 provides 2-bit
resolution increase. Thus, we need to get the remaining 4-bit
resolution boost from the loop filter, which corresponds to
an in-band noise suppression of 16 times. Since the NTF
can be approximated as a 2 in the signal band based on (4),
16 times noise reduction translates to a = 1/4. An even
smaller a can also meet the 90-dB SQNR requirement, but
it would lead to the increase in the kT /C noise, which is
undesirable. With a = 1/4, we can derive that Cres = C/3.
We also have g1 = 4 and g2 = 16, which means that the
comparator input pairs have the ratios of 1 : 4 : 16, as shown
in Fig. 3.
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
ZHUANG et al.: SECOND-ORDER NS SAR ADC WITH PASSIVE INTEGRATOR AND TRI-LEVEL VOTING
5
C. Effects of Offset, Noise, and Mismatch
Fig. 5 shows how non-ideal effects influence the signal
flow diagram. Here, we investigate various sources of kT /C
noise, comparator noise, comparator offset, DAC noise, and
DAC capacitor mismatch. As shown in Fig. 5, n 1 –n 6 represent
the kT /C noise on different capacitors during different clock
phases: n 1 is the noise on CDAC at the end of φe ; n 2 is the
noise on Cres at the end of φrs ; n 3 is the noise on Cres at the
end of φout ; n 4 is the noise on Cint1 at the end of φns1 ; n 5 is
the noise on Cres at the end of φns1 ; and n 6 is the noise on
Cint2 at the end of φns2 . n 7 represents the comparator input
referred noise. Vos represents the comparator input referred
offset voltage. n 8 represents the DAC noise. ε represents the
error due to DAC capacitor mismatch. This ε shows up both at
the quantizer and inside the feedback path, as the same DAC
is used for both quantization and Vres generation. The mean
squared values of n 1 –n 6 are derived and shown in Fig. 5.
With g1 = 1/a and g2 = 1/a 2 , the z-domain transfer
function considering nonidealities can be calculated, as shown
in Fig. 5. It shows that the front-end kT /C noise n 1 –n 4 are not
suppressed as they are directly added to the input signal. n 5 –n 6
are first-order shaped. Based on the equations, we can properly
choose C to meet the in-band thermal noise specification. The
comparator noise n 7 , the DAC noise n 8 , and the comparator
offset Vos are second-order shaped, together with the quantization error Q(z). Note that even though the comparator noise
n 7 is second-order shaped, it can still dominate the in-band
noise of the ADC due to its large value. For example, the inband noise breakdown of the prototype ADC is as follows:
the comparator noise power is 1.2 × 10−9 V 2 , the total kT /C
noise power is 1.1 × 10−9 V 2 , and the quantization noise
power is 0.3 × 10−9 V 2 . The comparator is the largest noise
contributor. The reason for a large comparator noise is that the
two extra paths in the three-path comparator degrade its noise
performance. Take the comparator used in the prototype ADC
as an example, its three input pairs have the widths of W , 4W ,
and 16W . Comparing to a classic one-path comparator with
the same total input pair width of 21W (to keep the same
comparator power consumption), the noise of the three-path
comparator, when input referred to the 1X path (marked as
Vres+/− in Fig. 3), is 21 times larger than that of the one-path
comparator. As a result, even though the three-path comparator
input referred noise is attenuated by 16 times due to NS, its
net in-band noise is 21/16 times larger than that of the onepath comparator. In other words, comparing to a classic SAR
ADC with a one-path comparator, the proposed NS SAR ADC
does not bring benefit to the comparator noise. Instead, its
main purpose is to reduce the quantization error and increase
SQNR. In the prototype ADC, the comparator noise reduction
is achieved by using the proposed tri-level voting technique in
Section III.
For an NS-SAR ADC, the overall error transfer function
(ETF) for the DAC mismatch error ε is one, as shown in Fig. 5.
This holds true for any value of a, g1 , and g2 . This behavior
is the same as that of a conventional SAR ADC. Thus,
standard SAR DAC mismatch error calibration techniques
can be applied to the proposed NS-SAR if needed. Another
Fig. 6. Influence of mismatch on gains. (a) Influence of Vth,cm,diff on g1 .
(b) Influence of Vth,cm,diff on g2 .
Fig. 7.
Influence of g1 and g2 variations on SNDR.
effective and hardware-efficient way to suppress ε is to use
error-feedback (EF)-based mismatch error shaping techniques
as in [3] and [12]. Unlike classic dynamic element matching
techniques that require unit-element DACs [13], they can be
directly applied to binary weighted DACs and, thus, are wellsuited for SAR ADCs.
D. Robustness Against PVT Variations
To examine the robustness of the proposed NS-SAR ADC,
let us investigate the locations of NTF zeros and poles.
As shown in (3), its zero location is set solely by the capacitor
ratio a and, thus, is robust against PVT variations. The pole
locations depend on a, g1 , and g2 . Since g1 and g2 represent
the strength of different input pairs and are first-order set by
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
6
Fig. 8.
IEEE JOURNAL OF SOLID-STATE CIRCUITS
Stability criteria for g1 and g2 .
size ratios of the same type of transistor, they are also insensitive to process corner, temperature, and voltage variations.
Yet g1 and g2 can change due to random mismatch in the
transistor threshold voltages. Each of the six comparator input
transistors has random V th mismatch. For each transistor pair,
we can define a common-mode mismatch and a differentialmode V th mismatch
Vth,dm ≡ Vth, p − Vth,n
(5)
Vth,cm ≡ (Vth, p + Vth,n )/2
(6)
where Vth, p and Vth,n represent the V th mismatch in
the positive and negative sides of the transistor pair. The
differential-mode mismatch Vth,dm contributes to the overall
ADC offset, but it does not affect the values of g1 and g2 .
By contrast, the common-mode mismatch Vth,cm changes
the effective overdrive voltage of the comparator input pair
and, thus, alters the relative strength of different transistor
pairs, affecting g1 and g2 . For example, if the common-mode
threshold voltage of the 4X transistor pair is lower than that of
the 1X transistor pair, the 4X transistor pair will have a larger
overdrive voltage and be stronger than expected, leading to
g1 > 4. In the prototype ADC, the V th standard deviation of
the 1X transistor is simulated to be 3.8 mV. Based on this
value, we can derive that the 3σ value of Vth,cm = (Vth, p +
Vth,n )/2 difference between the 1X pair and the 4X pair,
as well as the difference between the 1X pair and the 16X pair,
are 9 and 8.3 mV, respectively. To investigate their influence on
g1 and g2 , SPICE simulations have been performed assuming
the worst case ±10-mV Vth,cm difference between different
transistor pairs. The result is shown in Fig. 6 at different
comparator input common-mode voltages Vcm . It can be seen
that a larger Vcm leads to reduced variation in both g1 and g2 as
it has a larger baseline overdrive voltage (similar to a current
source mismatch analysis). In the prototype ADC design, Vcm
is set to half VDD of 550 mV. Therefore, the worst case g1
and g2 variations are within ±20%.
Now, let us investigate the effect of gain variations on the
final ADC performance. Fig. 7 shows the simulated SNDR
versus OSR under the worst case ±20% gain variations.
As can be seen, the SNDR variation is less than ±2 dB,
which demonstrates the robustness of the proposed NS-SAR
ADC architecture. Fundamentally, it is because a, g1 , and g2
are primarily set by component ratios. Even though transistor
Fig. 9. Root-locus plot of the NTF. (a) Pole/zero shift when g1 changes by
±20%. (b) Pole/zero shift when g2 changes by ±20%.
random mismatch can affect g1 and g2 , the overall ADC
performance variation is small.
To ensure loop stability, the poles in the NTF need to be
within the unit circle. The pole locations as a function of g1
and g2 can be derived from (3). By forcing them to be within
the unit circle, we can derive that the stability criterion is
7g1 + g2 < 196/3 for the case of a = 1/4. This inequality
is plotted in Fig. 8. The red shadowed region in Fig. 8 is
the unstable region, and the blue dots are g1 and g2 values
without variations and with ±20% variations each. As can
be seen, even if g1 and g2 vary by ±20%, they are far away
from the unstable region. Therefore, the proposed second-order
NS-SAR ADC is a stable architecture.
Fig. 9 shows how g1 and g2 variations affect the locations of
poles and zeros in the NTF. As can be seen, the NTF has two
zeros and two poles. The zero locations do not shift. The poles
move slightly under g1 and g2 variations. However, even if g1
and g2 vary by ±20%, the poles are still well within the unit
circle. This also demonstrates the robustness of the proposed
architecture.
III. T RI -L EVEL VOTING
A. ADC as Estimation Process
The SAR ADC conversion process can be considered as
a series of operations that aim to minimize the conversion
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
ZHUANG et al.: SECOND-ORDER NS SAR ADC WITH PASSIVE INTEGRATOR AND TRI-LEVEL VOTING
7
residue Vres ≡ Vin − Dout . Mathematically speaking, the standard SAR operation can be described by the following set
of equations (for simplicity, the kT /C noise, the comparator
offset, and capacitor mismatch are ignored here)
Vres,1 = Vin
Vres,n+1 = Vres,n
(7)
Vref Cn
− dn · N
i=1 Ci
(8)
where Vin ∈ [−Vref , +Vref ], Vres,n is the conversion residue
before the nth comparison, Cn is the nth capacitor size, and
dn is the nth comparison result given by
+1, for Vres,n + Vnoise,n > 0
dn =
(9)
−1, for Vres,n + Vnoise,n < 0
where Vnoise,n is the input-referred comparator noise during
the nth comparison. If the comparator noise Vnoise,n is very
small, d
n can accurately reflect the sign of Vres,n . Thus, dn ·
N
Ci is a good estimator for Vres,n , leading to a
Vref Cn / i=1
two times reduction in the range of Vres,n+1 . However, when
a low-power dynamic comparator is used, its noise Vnoise,n
can be comparable to the LSB conversion residue Vres,n . This
leads to incorrect decision dn . As a result, Vres,n+1 can no
longer decrease, leading to a limited ADC accuracy.
B. Majority Voting Technique
To effectively reduce the comparator noise and increase its
decision accuracy, the MV technique is proposed in [10]. The
way it works is to perform repeated comparisons and make
the final decision based on the majority
+1, for vote ≥ K /2
dn =
(10)
−1, for vote < K /2
where vote is the number of comparator outputs being “1”
and K is the total number of votes. Despite its effectiveness,
this approach has several limitations. First, it does not make
f ull use of the information embedded in the voting results.
It only cares about whether there are more “1”s or more “0”s.
It does not exploit the detailed distribution of “1”s and “0”s,
which carries additional information. Take a 15-time voting
as an example, the MV technique in [10] does not distinguish
15 or 8 votes as both are majority. However, 15 votes imply
that Vres,n is far away from 0, while 8 votes imply that Vres,n
is very close to 0. This information is not used.
Second, the technique in [10] requires a metastability detector that accurately senses the critical decision levels when
{Vres,n } is small. It needs calibration and increases the design
complexity. In addition, {Vres,n } may fall into metastability
more than once. This causes the total number of comparisons
to fluctuate. This complicates the SAR logic and the clocking
circuit and is not well suited for a modulator whose
quantizer is typically given a fixed amount of time to resolve.
C. Proposed Tri-Level Voting Technique
To obviate the need for the metastability detector as in
[10], the prototype NS-SAR does single comparison for the
first 9 bit (including 1 redundant bit) and only performs
Fig. 10.
Optimal L as a function of K .
repeated comparisons for the LSB bit. The comparator noise,
when referred to the ADC input, has a standard deviation
of 0.56 LSB. Under this condition, it is easy to show that
Vres,10 follows normal distribution with the standard deviation
of 0.8 LSB and has little dependence on Vin [14].
Our goal is to find a new definition of d10 that is a more
accurate estimator for Vres,10 , so that Vres,11 from (8) can
be minimized. A recent research work shows that one can
make full use of the voting statistics and produce a multilevel d10 that is a more accurate estimate for Vres,10 [14].
However, it cannot be directly applied to an NS-SAR ADC:
since the multi-level d10 is a fractional number, it cannot be
easily fed back by the DAC to generate the next conversion
residue Vres,11 required for passive integration. To address this
problem, we propose a tri-level voting technique, in which dn
is defined as follows:
⎧
⎪
⎨+1, for vote > K /2 + L
(11)
dn = 0,
for vote ∈ [K /2 − L, K /2 + L]
⎪
⎩
−1, for vote < K /2 − L
where L is a coefficient that depends on K . For K = 4, L
can be chosen to be 0, so that
⎧
⎪
⎨+1, for vote = 3 or 4
dn = 0,
(12)
for vote = 2
⎪
⎩
−1, for vote = 0 or 1.
When vote = 2, it implies that Vres,n is close to zero, and thus,
dn is set to 0. In this case, the DAC update is trivial. Feeding
back dn = 0 means that the DAC can be just maintained at
its previous state. No action is needed.
The optimal L is defined as the value of L that minimizes
the standard deviation of Vres,11 . In other words, the definition
of dn with the optimal L is the most accurate tri-level estimator
for Vres,10 . This optimal L can be solved using the same
statistical estimation technique as in [14]. Specifically, for
a given K , we can first derive the value of the Bayesian
estimator {V̂res,10 } under different vote values. Then, we find
the value of vote whose corresponding V̂res,10 is near 0.5.
Since 0.5 is the decision boundary for dn = 1 or 0, it is easy
to derive that such vote value is equal to K /2 + L according
to (11), and thus, we can back solve the optimal value for L.
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
8
IEEE JOURNAL OF SOLID-STATE CIRCUITS
Fig. 11. Standard deviation of Vres,11 versus K for tri-level voting and MV.
Although the optimal L can be calculated analytically, it can
also be obtained via numerical simulations. We can construct
a behavioral model for the ADC with noise, and then, feed in
a large number of input samples (e.g., > 104 ). For a given K ,
we can sweep the value of L and see which value of L leads
to the minimum standard deviation of Vres,11 .
The optimal value for L as a function of K is plotted shown
in Fig. 10. It shows that L increases with K . This is because
as K increases, even if Vres,n is very close to 0, there is a high
probability to have slightly unbalanced comparator decisions.
With the optimal value of L, the standard deviation of
Vres,11 is plotted in Fig. 11 as a function of K . It shows
that the proposed tri-level voting always outperforms the MV
technique. More importantly, this performance improvement
does not come with any hardware cost. It even lowers the
DAC power by skipping unnecessary updates.
In the prototype ADC, two LSB bits are used (see Fig. 2)
and the proposed tri-level voting is applied for both of them
with K = 4 to reduce the conversion error and boost the
ADC SNR. Comparing to having a single LSB bit with the
tri-level voting of K = 8, having two LSB bits with the trilevel voting of K = 4 yields 2.5-dB higher SNR as it is
able to cover a wider range (±2 LSB). The extra redundant
bit can also recover potential errors because of incomplete
settling [15]. The cost is one extra LSB capacitor and one
extra DAC update. Nevertheless, a SAR DAC typically has
two 1C LSB capacitors for layout matching purpose. Thus,
in reality, there is no need to explicitly add the extra LSB
capacitor.
Fig. 12 shows the simulated distribution of Vres,10 to Vres,12
for different types of ADC inputs. It can be seen that the
distribution of {Vres } has weak dependence on the input.
The proposed tri-level voting technique works well for both
large and small sinusoidal inputs, as well as Gaussian random inputs. It decreases the standard deviation of Vres from
0.81 LSB to 0.37 LSB.
Fig. 13 shows the behavioral simulation results. It can be
seen that two-time tri-level voting with K = 4 outperforms
the rest. It improves the SNR by 4 dB compared to the
case without voting applied. The proposed tri-level voting
technique increases the total comparator power by 70% due to
Fig. 12. Histogram of Vres,10 , Vres,11 , and Vres,12 (a) with a −6-dBFS
sinusoidal input signal, (b) with a −20-dBFS sinusoidal input signal, and (c)
with a Gaussian random input signal whose standard deviation is 10% ADC
full range.
Fig. 13.
voting.
SNR versus amplitude of input signal under different kinds of
seven extra firing. By contrast, to achieve the same 4-dB SNR
improvement in a conventional SAR, the comparator inputreferred noise would have to be reduced from 0.56 LSB to
0.23 LSB through analog scaling (in order to maintain the
same Vres standard deviation of 0.37 LSB, which also includes
0.29 LSB of quantization error). This translates to six times
comparator power increase. As a result, the proposed tri-level
voting technique is much more power efficient than the direct
analog scaling.
Fig. 14 shows the in-band noise breakdown of the prototype
ADC with and without two-time tri-level voting technique.
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
ZHUANG et al.: SECOND-ORDER NS SAR ADC WITH PASSIVE INTEGRATOR AND TRI-LEVEL VOTING
9
Fig. 14. In-band noise breakdown of the prototype ADC (a) with no voting
and (b) with two-time tri-level voting.
Fig. 16.
example.
Fig. 15.
Proposed N -phase (N > 2) non-overlapping clock generator.
It can be seen that the tri-level voting reduces both the
comparator noise and the quantization noise through the third
quantization level. It effectively reduces the sum of comparator noise and quantization noise from 1.5 × 10−9 V 2 to
0.6 × 10−9 V 2 .
The proposed tri-level voting technique can be applied to
not only NS-SAR but also standard SAR ADCs. Compared
to the MV technique in [10], the proposed tri-level voting
technique improves SNR but without extra power or hardware
cost. It does not need a metastability detector. It has a fixed
number of comparisons and works well for both synchronous
and asynchronous clocking schemes.
IV. DYNAMIC N ON -OVERLAPPING C LOCK G ENERATOR
As shown in Fig. 2, the master clock clk is divided into
20 phases, out of which φout , φns1 , φns2 , and φrs need to be
non-overlapping. This is to prevent more than two capacitors
to be shorted simultaneously; otherwise, the passive switchedcapacitor filters would not work properly.
The conventional way to construct a multi-phase clock generator for a synchronous SAR ADC is to use a chain of shift
Simulation of the proposed clock generator with N = 5 as an
registers. However, it cannot guarantee non-overlapping in the
presence of device mismatch and PVT variations. The classic
two-phase non-overlapping clock generator, widely used in
switched capacitor circuits, is not suitable either, as the clock
generator needs to produce 20 phases. The clock generators in
[16] and [17] provide four-phase non-overlapping clocks, but
they cannot be easily generalized to any arbitrary number of
non-overlapping clock phases.
This paper proposes a simple and low-power multi-phase
non-overlapping clock generator, whose topology is shown
in Fig. 15. It can support an arbitrary number of nonoverlapping phases. It is built by an array of dynamic D flipflops (DFF) with a modified second stage latch, whose pMOS
transistor M1 is connected not to C L K but rather a delayed
version of a new input terminal DNOL . DNOL is typically
shorted with D inside the DFF array. Because of the inserted
delay τd between DNOL and the gate of M1, signal Q can
rise only after D N O L falls low after τd time, which ensures
non-overlapping. To enable self-startup for the clock generator,
the D terminal in the first DFF is connected to a multi-input
NOR gate, as in a standard shift register-based multi-phase
clock generator. This ensures that there is only one mode of
oscillation regardless of the DFF initial condition. The number
of non-overlapping phases can be easily adjusted by changing
the number of DFFs in the chain.
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
10
IEEE JOURNAL OF SOLID-STATE CIRCUITS
Fig. 17.
Chip micrograph of the proposed NS-SAR ADC.
Fig. 18.
Measured power consumption.
Fig. 16 shows the simulated waveform of an example fivephase non-overlapping clock generator using the proposed
structure. The non-overlapping time τd is 115 ps under the
typical condition. The 20-phase non-overlapping clock generator used in the prototype ADC runs with a master clock
of 168 MHz. Its simulated power consumption is only 8 μW
because of its simplicity and the use of dynamic logic.
Similar to a standard shift register, the proposed nonoverlapping clock generator adds only one DFF delay from
the master clock edge to the output clock edges. As a result,
its jitter is small. The SPICE simulation shows that the rms
jitter is 0.5 ps. It does not affect the SNR of the prototype NS
SAR with the signal bandwidth of 262 kHz.
Fig. 19. Measured output spectrum. (a) Before DAC mismatch calibration.
(b) After DAC mismatch calibration.
V. M EASUREMENT R ESULTS
To verify the proposed NS-SAR architecture and circuit
techniques, a prototype ADC is fabricated in a 40-nm CMOS
process. Fig. 17 shows the chip micrograph, whose core area
is 0.04 mm2 . The DAC array capacitor CDAC has a total
capacitance of 4.2 pF and a unit MOM capacitor of 8 fF.
The integrator capacitors, Cint1 , Cint2 , and Cres , are 4.2, 4.2,
and 1.4 pF, respectively. Unlike CDAC , these capacitors do
not need to be partitioned into small unit capacitors, and
thus, they are implemented using high-density capacitors. As a
result, they occupy much smaller area than CDAC (see Fig. 17).
Even though using capacitors with different area densities can
cause slight mismatch, such mismatch only slightly changes
the locations of NTF poles and zeros, and thus, the overall
ADC performance is not affected.
The ADC sampling frequency is 8.4 MS/s. At the supply
voltage of 1.1 V, the chip consumes in total 143 μW, out of
which 55 μW comes from digital circuits such as SAR logic
Fig. 20.
Measured SNR and SNDR versus input amplitude.
and clock generator, 53 μW comes from the comparator, and
35 μW comes from the DAC switching, as shown in Fig. 18.
An off-chip reference buffer is used.
Fig. 19(a) shows the measured ADC output spectrum with
a −3-dBFS 100-kHz input. The slope of the second-order
shaping of (1 − 0.75z −1)2 is clearly seen. The harmonics are
primarily due to capacitor mismatches. At the OSR of 16,
the measured SNDR, which takes into account the second-
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
ZHUANG et al.: SECOND-ORDER NS SAR ADC WITH PASSIVE INTEGRATOR AND TRI-LEVEL VOTING
11
TABLE I
C OMPARISON W ITH S TATE - OF - THE -A RT ADC S
to seventh-order harmonics, is 74 dB. Fig. 19(b) shows the
measured spectrum after applying the foreground capacitor
mismatch calibration technique of [18] and [19]. All harmonics
are suppressed to −90 dBFS. The SNDR is improved to 78 dB.
Fig. 20 shows the measured SNR and post-calibration SNDR
versus the input amplitude. The peak SNR and SNDR are
83 and 78.4 dB, respectively. There is a small dip in the SNDR
when the input amplitude approaches the full-signal swing,
which is caused by the nonlinearity in the sample-and-hold
circuit and the ADC input signal.
Table I shows the comparison of the performance of this
prototype ADC with prior NS-SAR ADCs. It achieves 171dB Schreier FoM, which is in-line with the state of the art.
It outperforms prior passive NS-SAR ADCs in both SNDR
and power efficiency. The works using dynamic amplifiers can
achieve higher FoM [4], [5], but the dynamic amplifier gain is
PVT sensitive and, thus, requires either foreground or background amplifier gain calibration. By contrast, the proposed
fully passive NS-SAR architecture does not use any dynamic
amplifier. Its loop filter response is PVT robust.
VI. C ONCLUSION
This paper proposes a simple, robust, low-power, and
scaling friendly second-order NS-SAR ADC. It obviates the
need for operational amplifiers. Instead, it uses switches and
capacitors to build passive integrators and compensate the
signal attenuation by embedding relative gains inside a multipath dynamic comparator. The noise transfer function zeros
and poles are set by component ratios that are PVT insensitive.
It does not consume any static power. Moreover, it does not
require any bias circuit or stable operating point. This property
makes it well suited for sensor applications with low duty
cycle. It can wake up immediately and does not need any guard
time for the bias circuit to settle, which not only simplifies the
system design but also saves the overall system power.
R EFERENCES
[1] J. Fredenburg and M. Flynn, “A 90-MS/s 11-MHz-bandwidth 62-dB
SNDR noise-shaping SAR ADC,” in IEEE Int. Solid-State Circuits Conf.
(ISSCC) Dig. Tech. Papers, Dec. 2012, pp. 468–469.
[2] K. Obata, K. Matsukawa, T. Miki, Y. Tsukamoto, and K. Sushihara,
“A 97.99 dB SNDR, 2 kHz BW, 37.1 μW noise-shaping SAR ADC
with dynamic element matching and modulation dither effect,” in Proc.
IEEE Symp. VLSI Circuits, Jun. 2016, pp. 1–2.
[3] Y.-S. Shu, L.-T. Kuo, and T.-Y. Lo, “An Oversampling SAR ADC with
DAC mismatch error shaping achieving 105 dB SFDR and 101 dB
SNDR over 1 kHz BW in 55 nm CMOS,” in IEEE Int. Solid-State
Circuits Conf. (ISSCC) Dig. Tech. Papers, Dec. 2016, pp. 458–459.
[4] C.-C. Liu and M.-C. Huang, “A 0.46 mW 5 MHz-BW 79.7 dB-SNDR
noise-shaping SAR ADC with dynamic-amplifier-based FIR-IIR filter,”
in IEEE Int. Solid-State Circuits Conf. (ISSCC) Dig. Tech. Papers,
Feb. 2017, pp. 466–467.
[5] S. Li, B. Qiao, M. Gandara, and N. Sun, “A 13-ENOB 2nd -order
noise-shaping SAR ADC realizing optimized NTF zeros using an errorfeedback structure,” in IEEE Int. Solid-State Circuits Conf. (ISSCC) Dig.
Tech. Papers, Feb. 2018, pp. 234–235.
[6] Z. Chen, M. Miyahara, and A. Matsuzawa, “A 9.35-ENOB,
14.8 fJ/conv.-step fully-passive noise-shaping SAR ADC,” in Proc.
Symp. VLSI Circuits, 2015, pp. C64–C65.
[7] W. Guo and N. Sun, “A 12b-ENOB 61μW noise-shaping SAR ADC
with a passive integrator,” in Proc. 42nd Eur. Solid-State Circuits Conf.
ESSCIRC Conf., 2016, pp. 405–408.
[8] Z. Chen, M. Miyahara, and A. Matsuzawa, “A 2nd order fully-passive
noise-shaping SAR ADC with embedded passive gain,” in Proc. IEEE
Asian Solid-State Circuits Conf., Nov. 2016, pp. 309–312.
[9] W. Guo, H. Zhuang, and N. Sun, “A 13b-ENOB 173 dB-FoM 2nd -order
NS SAR ADC with passive integrators,” in Proc. Symp. VLSI Circuits,
2017, pp. C236–C237.
[10] P. Harpe, E. Cantatore, and A. V. Roermund, “A 10b/12b 40 kS/s SAR
ADC with data-driven noise reduction achieving up to 10.1 b ENOB
at 2.2 fJ/conversion-step,” IEEE J. Solid-State Circuits, vol. 48, no. 12,
pp. 3011–3018, Dec. 2013.
[11] S. Pavan, R. Schreier, and G. C. Temes, Understanding Delta–Sigma
Data Converters. Hoboken, NJ, USA: Wiley, 2017.
[12] J. Liu, G. Wen, and N. Sun, “Second-order DAC MES for SAR ADCs,”
Electron. Lett., vol. 53, no. 24, pp. 1570–1572, 2017.
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
12
[13] R. T. Baird and T. S. Fiez, “Linearity enhancement of multibit A/D and D/A converters using data weighted averaging,” IEEE Trans.
Circuits Syst. II, Analog Digit. Signal Process., vol. 42, no. 12,
pp. 753–762, Dec. 1995.
[14] L. Chen, X. Tang, A. Sanyal, Y. Yoon, J. Cong, and N. Sun, “A 0.7V 0.6-μW 100-kS/s low-power SAR ADC with statistical estimationbased noise reduction,” IEEE J. Solid-State Circuits, vol. 52, no. 5,
pp. 1388–1398, May 2017.
[15] T. Miki et al., “A 4.2 mW 50 MS/s 13 bit CMOS SAR ADC with
SNR and SFDR enhancement techniques,” IEEE J. Solid-State Circuits,
vol. 50, no. 6, pp. 1372–1381, Jun. 2015.
[16] X.-P. Yu, Y. Fang, and Z. Shi, “2.5 mW 2.73 GHz non-overlapping multiphase clock generator with duty-cycle correction in 0.13 μm CMOS,”
Electron. Lett., vol. 52, no. 14, pp. 1261–1262, 2016.
[17] D. Jeong, S. Lee, H. Lee, and B. Kim, “Ultra-low power directconversion 16 QAM transmitter based on Doherty power amplifier,”
IEEE Microw. Wireless Compon. Lett., vol. 26, no. 7, pp. 528–530,
Jul. 2016.
[18] S.-W. M. Chen and R. W. Brodersen, “A 6-bit 600-MS/s 5.3-mW
asynchronous ADC in 0.13-μm CMOS,” IEEE J. Solid-State Circuits,
vol. 41, no. 12, pp. 2669–2680, Dec. 2006.
[19] H. Garvik, C. Wulff, and T. Ytterdal, “An 11.0 bit ENOB, 9.8 fJ/conv.step noise-shaping SAR ADC calibrated by least squares estimation,” in
Proc. IEEE Custom Integr. Circuits Conf. (CICC), Apr. 2017, pp. 1–4.
Haoyu Zhuang received the B.S. and Ph.D. degrees
from the School of Microelectronics, Xidian University, Xi’an, China, in 2010 and 2017, respectively.
From 2014 to 2016, he was a Researcher with
The University of Texas at Austin, Austin, TX,
USA. He is currently an Assistant Professor with
the School of Electronic Science and Engineering,
University of Electronic Science and Technology
of China, Chengdu, China. His research interests
include analog circuits, such as physically unclonable function, pipeline ADC, SAR ADC, voltage
reference, amplifier, and sampling hold circuit.
Dr. Zhuang was a recipient of the Chinese National Scholarship in 2014,
the Chinese CSC Scholarship in 2014, the Chinese National Encouragement
Scholarship in 2009, the School Principal Scholarship in 2011, the name of
the Best Postgraduate Student in 2011, and the School First-class Scholarship
in 2010, 2012, and 2014. During his study in Xidian University, he ranked
the first in the school for three consecutive years of 2010–2012.
Wenjuan Guo received the B.S. degree from the
Institute of Microelectronics and Nanoelectronics,
Tsinghua University, Beijing, China, in 2011, and
the Ph.D. degree from The University of Texas at
Austin, Austin, TX, USA, in 2016.
From 2013 to 2014, she was a Design Co-Op
with Texas Instruments, Dallas, TX, USA. She is
currently an Analog Engineer with Intel Corporation,
Austin, TX, USA. Her current research is focused on
analog and mixed-signal integrated circuits design.
Dr. Guo was a recipient of the Texas Instruments
Ph.D. Fellowship in 2014 and 2015.
Jiaxin Liu (S’13–M’19) received the B.S. degree
from Shandong University, Jinan, China, in 2010,
and the M.S. and Ph.D. degrees from the University of Electronic Science and Technology of
China (UESTC), Chengdu, China, in 2013 and 2018,
respectively.
From 2015 to 2017, he was a Visiting Ph.D.
Student with the Department of Electrical and Computer Engineering, The University of Texas (UT)
at Austin, Austin, TX, USA. He is currently a
Post-Doctoral Researcher with Tsinghua University,
Beijing, China. His research interest is on analog and mixed-signal integrated
circuits design.
Dr. Liu was a recipient of the First Prize of Academic Scholarship in UESTC
for the consecutive years from 2012 to 2015, the China National Scholarship
in 2012, the First Prize of VeriSilicon Circuits Design Competition in 2015,
and the China CSC Scholarship in 2015.
IEEE JOURNAL OF SOLID-STATE CIRCUITS
He Tang (M’09) received the B.S.E.E. degree from
the University of Electronic Science and Technology of China, Chengdu, China, in 2005, the M.S.
degree in electrical and computer engineering from
the Illinois Institute of Technology, Chicago, IL,
USA, in 2007, and the Ph.D. degree in electrical
engineering from the University of California at
Riverside, Riverside, CA, USA, in 2010.
From 2010 to 2012, he was an Analog IC Designer
with OmniVision Technologies, Inc., Santa Clara,
CA, USA, where he worked on high-speed I/O
interface. Since 2012, he has been an Associate Professor and subsequently
a Professor with the University of Electronic Science and Technology of
China. He has authored or co-authored more than 50 papers. His research
interests focus on data converters and analog/mixed-signal IC designs. His current interest includes high-speed high-resolution low-power digital-calibrated
pipelined/SAR ADCs, and high-performance low-power ROIC designs.
Dr. Tang was a recipient of the Recruitment Program of Global Experts of
Sichuan Province, China, in 2013. He has been serving on IEEE CAS Analog
Signal Processing Technical Committee (ASPTC) since 2013.
Zhangming Zhu received the B.S., M.S., and Ph.D.
degrees in microelectronics from Xidian University,
Xi’an, China, in 2000, 2003, and 2004, respectively.
Since 2009, he has been a Professor with
the School of Microelectronics, Xidian University,
Xi’an. He has authored or co-authored more than
100 papers in journal. His research interests include
date converters, RF ICs, biomedical interface VLSI,
and 3-D ICs.
Long Chen (S’14) received the B.S. degree from the
Institute of Microelectronics, Tsinghua University,
Beijing, China, in 2011, and the Ph.D. degree from
The University of Texas at Austin, Austin, TX, USA,
in 2016.
He was an Intern with the Silicon Laboratories,
Austin, TX, USA, and Taiwan Semiconductor Manufacturing Company Ltd. He is currently a Staff
Design Engineer with Broadcom Ltd., Austin, TX,
USA. His current research interests include lowpower mixed-signal circuits design and CMOS RF
biosensors design.
Nan Sun (S’06–M’11–SM’16) received the B.S.
degree (Hons.) from the Department of Electronic
Engineering, Tsinghua University, Beijing, China,
in 2006, and the Ph.D. degree from the School of
Engineering and Applied Sciences, Harvard University, Cambridge, MA, USA, in 2010.
He is currently an Associate Professor with the
Department of Electrical and Computer Engineering,
The University of Texas (UT) at Austin, Austin, TX,
USA. His current research interests include analog,
mixed-signal, and RF integrated circuits, miniature
spin resonance systems, magnetic sensors and image sensors, micro- and
nano-scale solid-state platforms (silicon ICs and beyond) to analyze biological
systems for biotechnology and medicine.
Dr. Sun was the AMD Endowed Development Chair from 2013 to 2017.
He was a recipient of the NSF Career Award in 2013 and the Jack Kilby
Research Award from UT Austin in 2015 and 2016. He serves on the Technical
Program Committee of the IEEE Custom Integrated Circuits Conference and
the IEEE Asian Solid-State Circuit Conference. He is an Associate Editor of
the IEEE T RANSACTIONS O N C IRCUITS A ND S YSTEM I: R EGULAR PAPERS
and a Guest Editor of the IEEE J OURNAL OF S OLID -S TATE C IRCUITS . He
is currently the Distinguished Lecturer of the IEEE Circuits-and-Systems
Society.