Experimental Fluid Mechanics
R. J. Adrian . M. Gharib . w. Merzkirch
D. Rockwell· J. H. Whitelaw
Springer-Verlag Berlin Heidelberg GmbH
Engineering
springeronline.com
ONLINE LlBRARY
H.-E. Albrecht
M. Borys
N. Damaschke
c. Tropea
Laser Doppler and
Phase Doppler
Measurement Techniques
Springer
Prof. H.-E. Albrecht
Bräsigweg 18
18069 Rostock
Dr.-Ing. M. Borys
Physikalisch-Techn. Bundesanstalt
Fachlabor 1.41
Bundesallee 100
38116 Braunschweig
ISBN 978-3-642-08739-4
Dipl.-Ing. N. Damaschke
Technische Universität Darmstadt
Strömungslehre und Aerodynamik
Petersenstraße 30
64287 Darmstadt
Prof. Dr. -lng. C. Tropea
Technische Universität Darmstadt
Strömungslehre und Aerodynamik
Petersenstraße 30
64287 Darmstadt
ISBN 978-3-662-05165-8 (eBook)
DOI 10.1007/978-3-662-05165-8
Library of Congress Cataloging -in -Publication-Data
Laser doppler and phase doppler measurement techniques / H.-E. Albrecht... [et al.l.
p. cm.-- (Experimental fluid mechanics)
Includes bibliographical references and index.
1. Fluid dynamic measurements. 2. Laser Doppler velocimeter. I. Albrecht,
Heinz-Eberhard. H. Series.
TA357.5.M43 L374 2002
620.1 '064--dc21
2002032404
This work is subject to copyright. All rights are reserved, whether the whole or part of the material
is concerned, specifically the rights of translation, reprinting, reuse of illustrations, recitations,
broadcasting, reproduction on microfilm or in any other way, and storage in data banks. Duplication of this publication or parts thereof is permitted only under the provisions of the German
copyright Law of September 9, 1965, in its current version, and permission for use must always be
obtained from Springer-Verlag. Violations are liable for prosecution under the German Copyright
Law.
http://www.springer.de
© Springer-Verlag Berlin Heidelberg 2003
Originally published by Springer-Verlag Berlin Heidelberg New York in 2003.
Softcover reprint ofthe hardcover Ist edition 2003
The use of general descriptive names, registered names trademarks, etc. in this publication does
not imply, even in the absence of a specific statement, that such names are exempt from the relevant
protective laws and regulations and therefore free for general use.
Typesetting: data delived by authors
Cover design: design & production, Heidelberg
Printed on acid free paper 6113020/M - 5 4 3 2 1
Series Editors
PROF. R.
J. ADRIAN
University of Illinois at Urbana-Champaign
Dept. of Theoretical and Applied Mechanics
216 Talbot Laboratory
104 South Wright Street
Urbana, IL 61801
USA
PROF. M. GHARIB
California Institute of Technology
Graduate Aeronautical Laboratories
1200 E. California Blvd.
MC 205-45
Pasadena, CA 91125
USA
PROF. DR. W. MERZKIRCH
Universität Essen
Lehrstuhl für Strömungslehre
Schützenbahn 70
45141 Essen
Germany
PROF. DR. D. ROCKWELL
Lehigh University
Dept. of Mechanical Engineering and Mechanics
Packard Lab.
19 Memorial Drive West
Bethlehem, PA 18015-3085
USA
PROF.
J. H. WHITELAW
Imperial College
Dept. of Mechanical Engineering
Exhibition Road
London SW7 2BX
UK
Integrated Solutions in Laser
Doppler Anemometry and
Phase Doppler Anemometry
•
High accuracy LDA and PDA measurements
•
State-of-the-art software package and high quality
electronics/optics
•
Ideal for 1D, 2D and 3D point measurement of velocity and
turbulence distribution in both free flows and interna I flows
•
On-line measurement of the size, velocity and concentration
of spherical particles, droplets and bubbles suspended in
gaseous or liquid flows
Read more about Dantee Dynamies' complete solutions for
Laser Doppler Anemometry and Phase Doppler Anemometry
on www.dantecdynamics.com
Preface
The laser Doppler and phase Doppler measuring techniques are both relatively
young. The laser Doppler technique was first proposed in 1964 but came into
widespread use only in the 1970s. The phase Doppler technique exhibited a
similar development about 20 years later. Both techniques share a number of
commonalties, not only in the hardware but also in the fact that both are most
widely used in the fluid mechanics community. Therefore the technical overlap
of the two techniques also extends to a strong 'user' overlap and this was one of
the prime motivations for addressing both techniques in one volume.
This book has arisen out of need. A comprehensive book about the phase
Doppler measurement technique does not exist. Neither are the more recent developments of the laser Doppler technique weIl documented in a single volume.
The student or user of these techniques presently relies on a combination of
contributions from conference proceedings, journal publications and manufacturers' documentation. Furthermore, the fundamentals involved come from a
wide variety of disciplines, e.g. electromagnetic theory, signal processing, etc.,
fields which are generally not so familiar within the fluid mechanies community.
This book is an attempt to consolidate some of this information for the reader.
The authors have intended this book to be both a reference book and an instructional book. This expresses itself in quite a varied degree of complexity in
the different chapters. A reasonable attempt has been made to be thorough in
the citation of literature to direct the reader to many details wh ich cannot be included within the scope of this book. At the same time, the reader will find some
novel results in this book, especially on the subject of particle characterization.
In preparing this book, the authors have drawn on the experience and advice
of a large number of colleagues within their respective institutes who deserve
special mention and thanks. In Rostock this includes Dr. H. Bech, Dr. W. Fuchs,
Dr. W. Kröger and Prof. Dr. E. Müller. Prof. Dr. K. Bauckhage from the University of Bremen at the Institute for Material Science initiated a joint project from
the Deutsche Forschungsgemeinschaft with Rostock, which stimulated new
ideas about the computation oflight scattering on small particles in homogeneous and inhomogeneous fields. At the Physikalisch-Technische Bundesanstalt in
Braunschweig, where M.B. worked at the Department of Fluid Mechanics until
2000, the collaboration with Prof. Dr. D. Dopheide, Dr. R. Kramer, Dr. H. Müller
and Dr. V. Strunck was much appreciated. At the Lehrstuhl für Strömungsmechanik in Erlangen, where C.T. worked until 1997, interaction with Prof. Dr.
G. Brenn, Dr. J. Domnick, Prof. Dr. F. Durst, Dr. A. Naqwi and T.-H. Xu is
gratefullyacknowledged. In Darmstadt the authors had the pleasure of working
Preface
VIII
closely with Dr. L Araneo, Dipl.-Ing. K. Heukelbach, Dr. H. Nobach and Dr. I.V.
Roisman on various application aspects.
The authors first came into contact with each other through a joint project
from the Volkswagen Foundation (Contract 1/66 487) and then through subsequent grants from the Deutsche Forschungsgemeinschaft (Mu 1117/1, Tr 194/9).
The authors gratefully acknowledge the finaneial support of these funding ageneies for enabling this initial collaboration and its continuation over the past
years.
Unavoidably there exist errors and omissions in this book and the authors
take full responsibility for these. Readers who have suggestions for improvements are welcome to contact the authors (tropea@springer.de).
Rostock / Darmstadt / Braunschweig 2002
H.-E. Albrecht
M. Borys
N. Damaschke
C. Tropea
Contents
1 Introduction ........................................................................................................... 1
1.1 Historical Perspective .................................................................................. 1
1.2 Use ofthe Book ............................................................................................ 3
PART I:
FUNDAMENTALS
2
Basic Measurement Principles ............................................................................. 9
2.1 Laser Doppler Technique .......................................................................... 12
2.2 Phase Doppler Technique ......................................................................... 23
2.3 Time-Shift Technique ................................................................................ 25
3
Fundamentals ofLight Propagation and Optics .............................................. 27
3.1 Electromagnetic W aves ............................................................................. 27
3.1.1.
Description of Electromagnetic Waves ...................................... 27
3.1.2.
Polarization ................................................................................... 33
3.1.3.
Boundary Conditions and Fresnel Coefficients ........................ .35
3.1.4.
Laser Beams ................................................................................. .37
3.1.5.
Optical Mixing of Electromagnetic Waves................................ .44
3.1.6.
The Doppler Effect ...................................................................... .45
3.2 Optical Components ................................................................................. .47
Matrix Transformation for Imaging .......................................... .47
3.2.1.
3.2.2.
Propagation ofLaser Beams Through Lenses and Apertures .. 53
3.2.3.
Optical Gratings and Bragg Cells ................................................ 56
3.2.4.
Optical Fibers ................................................................................ 65
3.2.5.
Photodetectors .............................................................................. 70
4
Light Scattering from Small Particles ................................................................ 79
4.1 Scattering of a Plane Wave ........................................................................ 81
4.1.1.
Description using Geometrical Optics (GO) .............................. 85
4.1.2.
Description using Lorenz-Mie Theory and Debye Series ......... 96
4.1.3.
Scattering Characteristics for a Plane Wave ............................ 100
4.2 Scattering of an Inhomogeneous Field .................................................. 127
4.2.1.
Extension to the Method of Geometrical Optics (EGO) ......... 128
4.2.2.
Description using Fourier Lorenz-Mie Theory (FLMT) ......... 134
4.2.3.
Scattering Characteristics of an Inhomogeneous Field .......... 146
4.3 Characteristic Quantities ofLight Scattered by Sm all Particles .......... 162
X Contents
PART 11: MEASUREMENT PRINCIPLES
5 Signal Generation in Laser Doppler and Phase Doppler Systems ................ 169
5.1 The Signal From an Arbitrarily Positioned Detector ........................... 169
5.1.1.
Fundamental Relations .............................................................. 172
5.1.2.
Signals from very Sm all Particles ............................................. 177
5.1.3.
Signals from Large Particles ...................................................... 199
5.1.4.
Visibilityofthe Signal ................................................................ 214
5.1.5.
Shift Frequency Influence ......................................................... 219
5.1.6.
Measurement and Detection Volumes..................................... 221
5.1.7.
Statistical Time Series ofParticle Signals ................................. 227
5.2 Laser Doppler Technique ........................................................................ 231
5.2.1.
Dual-Beam Configuration ......................................................... 232
5.2.2.
Reference-Beam Configuration ................................................ 233
5.3 Particle Sizing with Phase Doppler and Time-Shift Technique .......... 244
5.3.1.
Determination ofIncident and Glare Point Positions ............ 247
5.3.2.
Phase Doppler Technique ......................................................... 250
5.3.3.
Reference Phase Doppler Technique ....................................... 254
5.3.4.
Time-Shift Technique ................................................................ 259
5.4 Refractive Index Determination ............................................................. 266
5.5 Moire Models ........................................................................................... 267
6 Signal Detection, Processing and Validation ................................................. 273
6.1 ReviewofSome Fundamentals .............................................................. 275
6.1.1.
Discrete Fourier Transform (DFT) ........................................... 276
6.1.2.
Correlation Function ................................................................. 281
6.1.3.
Hilbert Transform ...................................................................... 283
6.1.4.
Signal Noise ................................................................................ 287
6.1.5.
Cramer-Rao Lower Bound (CRLB) .......................................... 290
6.2 Signal Detection ....................................................................................... 300
6.3 Estimation ofthe Doppler Frequency ................................................... 305
6.3.1.
Spectral Analysis ........................................................................ 307
6.3.2.
Correlation Techniques ............................................................. 311
6.3.3.
Period Timing Devices .............................................................. 313
Quadrature Demodulation ........................................................ 315
6.3.4.
6.4 Determination of Signal Phase ............................................................... 317
6.4.1.
Cross-Spectral Density .............................................................. 317
6.4.2.
Covariance Methods .................................................................. 321
6.4.3.
Quadrature Methods .................................................................. 322
6.5 Model-Based Signal Processing .............................................................. 323
6.5.1.
Fundamentals ............................................................................. 323
6.5.2.
Example Applications ................................................................ 324
Contents
XI
7
Laser Doppler Systems ..................................................................................... .33 7
7.1 Input Parameters from the Flow and Test Rig ..................................... .338
7.1.1.
Description of the Flow Field ................................................... .338
7.1.2.
Necessary Spatial and Temporal Resolution .......................... .351
7.1.3.
Flow and Flow-Rig Parameters ................................................ .358
7.2 Components and Layout of the Transmitting Optics ......................... .363
7.2.1.
Collimators ................................................................................ .363
7.2.2.
Beamsplitters and Polarizers ..................................................... 369
7.2.3.
Methods for Achieving Directional Sensitivity ....................... 371
7.2.4.
Generation ofthe Measurement Volume ............................... .377
7.3 Layout ofReceiving Optics .................................................................... .383
7.4 System Description .................................................................................. 389
7.4.1.
One-Velo city Component Systems .......................................... .389
7.4.2.
Two-Velocity Component Systems ......................................... .392
7.4.3.
Three-Velo city Component Systems ....................................... .396
7.4.4.
Multi-Point Systems .................................................................. .401
7.5 Laser Transit Velocimetry ..................................................................... .405
8
Phase Doppler Systems .................................................................................... .409
8.1 Selection of the Optical Configuration ................................................. .411
8.2 Single-Point Phase Doppler Systems ................................................... .417
8.2.1.
Three-detector, Standard Phase Doppler System .................. .417
8.2.2.
Planar Phase Doppler System .................................................. .425
8.2.3.
Dual-Mode Phase Doppler ....................................................... .430
8.2.4.
Dual-Burst Technique ............................................................... .436
8.2.5.
Extended Phase Doppler Technique ....................................... .446
8.2.6.
Reference Phase Doppler Technique ....................................... .449
8.3 Further Design Considerations for Phase Doppler Systems ............. ..454
8.3.1.
Influence ofthe Gaussian Beam ................................................ 454
8.3.2.
Slit Effect ..................................................................................... 466
8.3.3.
Non-Spherical and Inhomogeneous Particles ........................ .467
8.4 Multi-Dimensional Sizing Techniques ................................................. .470
8.4.1.
Interferometric Particle Imaging (IP!) ..................................... 470
8.4.2.
Global Phase Doppler (GPD) Technique ................................ .478
8.4.3.
Concentration Limits ................................................................ .481
9
Further Partic1e Sizing Methods Based on the Laser Doppler Technique .. .491
9.1 Techniques Based on Signal Amplitude ................................................ 491
9.1.1.
Cross-sectional Area Difference Technique ........................... .491
9.1.2.
Combined Laser Doppler and White Light Sizer .................... 500
9.2 Time-Shift Technique .............................................................................. 501
9.2.1.
Time-Shift Technique in Forward Scatter ............................... 504
9.2.2.
Time-Shift Technique in Backscatter ...................................... .506
9.3 Rainbow Refractometry .......................................................................... 517
9.4 Shadow Doppler Technique .................................................................... 523
XII
Contents
PART III: DATA PROCESSING
10 Fundamentals ofData Processing ................................................................... 529
10.1 Statistical Principles ................................................................................ 529
10.2 Stationary Random Processes ................................................................ 533
10.3 Estimator Expectation and Variance ..................................................... 535
10.3.1. Estimators for the Mean ............................................................ 535
10.3.2. Estimators for Higher Order Correlations ............................... 539
10.3.3. Estimators for Transient Processes .......................................... 542
10.4 Propagation ofErrors .............................................................................. 543
11 Processing of Laser Doppler Data .................................................................... 545
11.1 Estimation of Moments ........................................................................... 547
11.2 Estimation of Turbulent Velo city Spectra............................................. 552
11.2.1. The Slotting Technique ............................................................. 554
11.2.2. Reconstruction with FFT ........................................................... 558
11.2.3. Post-Processing Steps ................................................................ 561
11.3 Correlation Estimates from Multi-Point Systems ................................ 563
11.4 Measurements in Transient Processes .................................................. 566
11.4.1. Effect ofWindow Size on Phase and Ensemble Statistics ...... 567
11.4.2. Energy Partitioning in Transient Flows ................................... 568
11.5 Data Simulation ....................................................................................... 569
12 Processing ofPhase Doppler Data ................................................................... 573
12.1 Validation Procedures ............................................................................. 573
12.1.1. SNR Validation ........................................................................... 573
12.1.2. Phase Difference Validation ...................................................... 574
12.1.3. SphericityValidation ................................................................. 574
12.1.4. Amplitude Validation ................................................................ 574
12.1.5. Transit Time Validation ............................................................ 575
12.2 Particle Statistics ...................................................................................... 576
12.2.1. Flux Density Vectors and Concentration ................................ 576
12.2.2. Distribution ofParticles ............................................................ 579
12.2.3. Geometry of the Detection Volume ......................................... 582
12.2.4. Estimation ofthe Number ofParticles ..................................... 590
12.2.5. Summary and Examples ............................................................ 591
l2.3 Post-Processing of Phase Doppler Data ................................................ 595
12.3.1. Particle Size Distributions ......................................................... 595
12.3.2. Mean Diameters ......................................................................... 598
l2.3.3. Non-Spherical and Inhomogeneous Particles ......................... 599
Contents
XIII
PART IV: ApPLICATION ISSUES
13 Choice ofParticles and Partide Generation ................................................... 605
13.1 Particle Motion in Flows ......................................................................... 606
13.2 Particle Generation .................................................................................. 613
13.2.1. Droplet Generation .................................................................... 614
13.2.2. Solid Particle Generation ........................................................... 619
13.3 Introducing Particles into the Flow ....................................................... 621
13.3.1. Liquid Flows ................................................................................ 622
13.3.2. Gas Flows ..................................................................................... 622
13.3.3. Two-Phase Flows ........................................................................ 623
13.3.4. Natural Seeding .......................................................................... 624
14 System Design Considerations ........................................................................ 627
14.1 System Design Guidelines ....................................................................... 627
14.1.1. Laser Doppler Systems ............................................................... 628
14.1.2. Phase Doppler Systems .............................................................. 635
14.1.3. Alignment and Adjustment... .................................................... 638
14.2 System Design Examples ......................................................................... 642
14.2.1. Velo city Measurements in a Narrow Channel Flow ............... 642
14.2.2. Drop Size Measurements in a Diesel Injector Spray ............... 647
14.3 Refractive Index Matching ...................................................................... 655
14.3.1. Matching with Flow Containment... ......................................... 655
14.3.2. Matching for Variable Density.................................................. 660
Appendix ................................................................................................................... 661
List of Symbols and Acronyms ........................................................................ 662
Derivation of Equations Describing a Laser Beam ........................................ 681
Internal and Near Field Solution ...................................................................... 686
Bibliography ............................................................................................................. 689
References .......................................................................................................... 690
Books (or parts thereof) on the Laser or Phase Doppler Techniques .......... 718
Periodicals Dealing with the Laser or Phase Doppler Techniques ............... 719
Conference Series devoted to Laser or Phase Doppler Techniques ............. 720
Index ......................................................................................................................... 723
2
lIntrodl,Iction
very early stage several suggestions were made about how to obtain more information about the scattering centers themselves, especially their size. Initially the
amplitude (or the modulation depth) of the scattered intensity was considered.
However, amplitude-based techniques have a number of drawbacks, not the
least ofwhich is the need for calibration, which, even today, have hindered their
widespread use. In 1975 Durst and Zare (1975) first published the idea of measuring partiele size using phase measurements. They wrote:
"Double element photo detectors with fixed spacing detect different signal amplitude
differences for different fringe spacing and, hence, can be used to record a signal sensitive
to the size of spherical particles. The authors used a double element photodiode with
elements spaced 2 mm apart to obtain information on the sphere diameter through phase
measurements between the two detected signals."
They related the fringe spacing in space to the radius of curvature of the partiele; however, they proposed measuring the fringe spacing through the amplitude difference. Although they recognized the phase difference between the two
signals, apparently they did not realize it could be measured reliably. They came
to the conelusion:
"However, it is apparent that size measurements of this kind require the distance between the photodetectors to be matched to the fringe distance and, hence, to the particle
size to be measured. This requirement is a disadvantage for practical measurements of
size distribution."
In the final-year thesis of Flögel (1981) entitled "Investigation of partiele velocity and partiele size using a laser Doppler anemometer", equations relating
particle diameter to the phase difference between signals detected by two photodetectors were given and a system was tested by measuring drop size distributions in a spray. In 1984 three groups presented phase Doppler systems, Bauckhage and Flögel (1984) (also documented in the Ph.D. thesis of Flögel 1987),
Saffmann, Buchhave and Tanger (1984) and Bachalo and Houser (1984). The basic physical ideas were thus available and a rapid period of development of the
phase Doppler technique followed. An account of this initial phase of the instrument development was assembled by Hirleman (1996).
The phase Doppler technique uses a single scattering mode, usually reflection
or first-order refraction, to determine partiele size. Whereas the signals in the
reflective mode are only sensitive to size and detector position, in the refractive
mode the index of refraction is also an influencing parameter. In recent years,
several instruments have been demonstrated which, through a combination of
reflected and refracted light, are capable of determining also the refractive index
of the particle. These developments are very much on-going. A second path of
development is the measurement of non-spherical partieles, whereby many suggestions to date can no longer be strictly called phase Doppler instruments.
Some of these topics will be addressed in chapters 8 and 9.
A third measurement technique has been ineluded in this book, the 'timeshift' or 'volume-displacement' technique, which was first introduced by AIbrecht et al. (1993) and is also used for partiele sizing. This technique is still in
its infancy and has yet to be realized as a commercial instrument. On the other
hand, in combination with a phase Doppler system, the time-shift technique of-
1.2 Use of the Book
3
fers the potential for particle characterization beyond just the size. This technique is possible to implement only when shaped beams are used for illuminating the measurement volume; however, this is virtually always the case with laser
Doppler and phase Doppler systems. The basic principles of this technique are
described in detail in this book and corresponding guidelines for system design
are given.
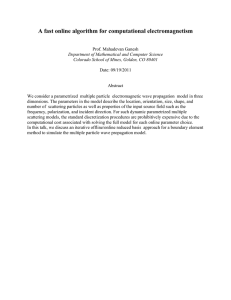
In Fig. 1.1 the three techniques discussed in this book and their various implementations are compared with other laser measurement techniques for single
and multi-phase flows. The techniques have been arranged according to the
number of velo city components they measure (u, v, w) and the dimensions in
which the flow field is sampled (x,y,z,t). The possibility of measuring size is
also no ted.
Time {
I
DGV - Doppler global velocimetry
FRS - Filtered Rayleigh scattering
GPD - Global phase Doppler
IPI - Interferometric particle imaging
LDV - Laser Doppler velocimetry
LFT - Laser Flow Tagging
LTV - Laser transit velocimetry
PD - Phase Doppler
PIV - Planar Doppler velocimetry
PIV - Particle image velocimetry
PTV - Particle tracking velocimetry
Fig. 1.1. Overview oflaser measurement techniques for single and multi-phase flows
1.2 Use of the Book
There are many common elements between the laser Doppler and phase Doppler techniques, not only in the optical system but also in the signal processing
and data processing. This is reflected in the organization of this book, as illustrated in Fig. 1.2.
Part I covers the fundamentals of light propagation and light scattering in
detail and is essential for those readers concerned with the design and layout of
laser Doppler and phase Doppler instruments.
4
lIntroduction
Phase Doppler Technique
(5.3)
Fig. 1.2. Organization ofbook chapters
1.2 Use ofthe Book
5
Part II deals with specific measurement principles, more fundamentally in
chapter 5 and more application orientated in chapters 7 and 8 for the laser Doppler and phase Doppler techniques respectively. The overlapping topic of signal
processing is covered in chapter 6, with an introductory section on fundamentals. A number of novel techniques for particle sizing are introduced in both
chapters 8 and 9.
Part III deals with data processing, with some fundamentals covered in
chapter 10 and more specific issues in chapters 11 and 12.
Part IV discusses tracer particles in chapter 13 and specific design considerations in chapter 14, albeit only a small selection of possible applications can be
considered.
More tedious derivations, primarily from chapters 4 and 5, have been relegated to the Appendices. The Bibliography has been broken down into books,
periodicals, and archival papers, arranged in alphabetical order.
Already from this brief overview it is apparent that this book draws on many
different disciplines: physics, electromagnetic theory, optics, electronics, signal
processing and data processing theory, fluid mechanics and two-phase flows.
Each discipline and community has developed its own nomenclature and conventions and it is not surprising that if these were all retained, a great deal of
repetition of symbols would occur. Nevertheless, we have chosen to do exactly
this, so that each reader will hopefully recognize quantities in their accustomed
form. As an aid, we have added a comprehensive list of symbols in Appendix I.
PART I
FUNDAMENTALS
10
2 Basic Measurement Principles
a
Signal in time domain:
v·r
\
Parlide
Lighl
source
AmplilUde
;(/)
/
i(t)
Receiver
b
ßs ,
Signal in time domain
Amplilude
Spalial
graling
Signal in frequency domain
i(t) '---+T----''--T-_--.I(fl
c
LL
AmplilUde
f,
f
Pha e
.u) lL..-_Il-'_
a
f
d
Signal in time domain
Amplitude
e
i(t)
Signal in correlation domain
Amplitude
;(')~
Ilt
Fig. 2.1a-e. Flow measurement techniques using an optically fixed measurement volume
In Fig. 2.1b,c a spatial grating has been introduced either on the transmitting
side or on the receiving side of the system. The former case is designated as a
real substructure, the latter as a virtual substructure, since it is only present
from the point of view of the receiver and normally changes with particle diameter or with the position of the detector. In principle, any type of grating can
2 Basic Measurement Principles
11
be used, for instance, a multiple-line grating, as shown in Fig. 2.1b,c, or a twoline grating, which will result in a 'time-of-flight' measurement, as shown in
Fig. 2.1d,e. However, the latter is disadvantageous at higher flow turbulence levels, since the particle trajectory may be such that only one of the two grating
lines is crossed, resulting in a missed signal and thus lower data rates and biased
averages. For exactly this reason, the spatial extent of the grating is often kept to
a minimum in practical systems.
A full grating on the other hand resolves the velo city over the entire measurement volume and indeed, using uniformly spaced lines, the frequency f of the
resulting signal pulses is directly proportional to the velocity normal to the
grating lines
LIx
Vx
=y= f LIx
(2.2)
where LIx is the line spacing and T is the period between pulses. The frequency
can be determined from the signal either in time or frequency domain.
Information relating to the particle radius is contained in the amplitude, in
the modulation (visibility), in the phase and in the arrival time of the particle
signals. Amplitude and visibility techniques (Umhauer 1996, Gebhardt 1989) require one detector and must be calibrated. Phase differences (phase Doppler
technique) or arrival time differences (time-shift technique) are measured using
at least two detectors and require no calibration.
Using a CCD-line array, a CCD matrix (Christophori and Michel 1997, Michel
et al. 1997) or a matrix of optical fibers (Petrak and Hoffmann 1985, Morikawa
et al. 1986) as a receiver, the grating becomes essentially apart of the receiver
and a virtual measurement volume is obtained. In this case, incoherent light is
adequate.
However, the formation of real measurement volumes of sufficient precision
is not possible using incoherent light. For this reason monochromatic, coherent
laser light is used. This leads to the well-known laser Doppler and phase Doppler
optical configurations.
In certain laser Doppler configurations (reference-beam mode), an interference pattern is formed on the detector surface through the superposition of a
scattered light field and a reference wave. This interference pattern can be interpreted as a virtual measurement volume (Yeh and Cummins 1964).
For the 'time-of-flight' arrangements shown in Fig. 2.1d,e, use of either incoherent or coherent light is possible in principle; however, practically the necessary spatial resolution is only possible with laser light. These systems are thus
known as 'laser two focus' (L2F) or 'laser transit velocimeter' (LTV) systems
(SchodI1975, 1977, Schodl and Förster 1988). This case is actually a special case
of the continuous line grating, where the distance Llsx is now defined by only
two limiting bounds. Although the data validation rate with LTV systems decreases dramatically with increasing flow turbulence level, by rotating the optical system about its optical axis to several different orientations, some statistical
information regarding the turbulence field is obtainable. Nevertheless, the use of
12
2 Basic Measurement Principles
such systems is generally restricted to weH directed flows, e.g. as found in turbomachinery blading.
The foHowing discussion concentrates on the most commonly used methods
from those listed above for defining the measurement volume, Fig. 2.1b, the laser Doppler and phase Doppler technique as weH as Fig. 2.1d, the laser transit
velocimeter and the pulse delayvelocimeter.
2.1 Laser Doppler Technique
The laser Doppler technique (Vasilenko et al. 1975, Watrasiewicz and Rudd
1976, Durst et al. 1976, Durrani and Greated 1977, Rinkevicjus 1978, Drain 1980,
Dubiscev and Rinkevicjus 1982, Wiedemann 1984, Albrecht 1986) uses monochromatic laser light as a light source. The interference of two beams crossing in
the measurement volume or the interference of two scattering waves on the detector creates a fringe pattern. The velo city information for moving scattering
centers is contained in the scattered field due to the Doppler effect. Strictly
speaking, the laser Doppler technique is an indirect measuring technique, since
it measures the velo city of inhomogeneities in the flow, typically tracer particles.
This represents the flow velo city only if no appreciable slip velocity is present.
Otherwise the slip velocity must also be determined.
The basic principle of the laser Doppler technique is illustrated in Fig. 2.2.
The Doppler effect (section 3.1.6) is invoked twice, once when the incident laser
light of the transmitter system, characterized by the wavelength Ab and frequency Ib (subscript b for beam), impinges on the moving target, and once
when light with a frequency I p (subscript p for particle) is scattered from the
moving target particle and received by a stationary detector with the frequency
Ir (subscript r for receiver) (Goldstein and Kreid 1967).
eb·v p
1
Ir=Ip
1---
e ·v
1-~
=Ib
c
"" Ib + Ib
e \
1-~
(2.3)
c
vp.(epr-e b)
C
vp.(epr-e b)
Ib +----'-----------'-Ab
where cis the speed oflight in the medium surrounding the particle.
The second term in the second line of Eq. (2.3) contains the Doppler shift of
the incident wave frequency. The difference of the normal vectors appears when
the direction of propagation of the incident and scattered wave differs. The
Doppler shift is directly proportional to this difference and to the velocity of the
particle. For typical flow systems the Doppler shift is of the order 1. .. 100 MHz,
which compared to the frequency oflaser light of approximately 10 14 Hz is very
small and thus virtually impossible to resolve directly. One exception is a direct
detection with the help of an interferometer (Paul and Jackson 1971, Jackson
2.1 Laser Doppler Technique
13
Fig. 2.2. Defining geometry for a pplying the Doppler effect in the laser Doppler technique
and Paul 1971, Smeets and George 1981) or through the use of frequency dependent absorption cells, the latter leading to the Doppler global velocimeter
(DGV) (Komine 1990, Komine et al.1991, Meyers 1995), sometimes called planar
Doppler velocimetry (PDV) (Mosedale et al. 2000). However, conventional optical arrangements work with two scattered waves, each exhibiting a different
Doppler shift. Alternatively one laser beam can act as a reference beam and be
mixed with a scattered wave. The two waves are mixed on the detector surface in
a process known as optical heterodyning, yielding the beat frequency, which
typically lies in a much more manageable frequency range for signal processing.
There are several alternatives to practically realize such systems using one ineident beam, two of which are shown in Fig. 2.3. In Fig. 2.3a a dual-scatteredwave system is shown and in Fig. 2.3b a one-reference-beam, one-scattered-wave
system, both of which have been successfully demonstrated (Yeh and Cummins
1964, Forman et al. 1965, Goldstein and Kreid 1967).
In both cases the difference (beat) frequency fD is obtained through the optical mixing of waves with frequencies fl and f2 on the detector. For the onebeam configurations these frequencies are given as
a
b
..I. x
I. x
Bearn spli tter
,.
~
Lascr bearn
A.,f.
Z
e~
,
/
"
emirellecting
mirror
'"
e,
e/"
2
Lascrbcarn
A.,!.
,
/~ .
Recc"'cr
/'
l\lirror
",
/ " Receh'cr
Semirellecting
mirror
Fig. 2.3a,b. Optical configuration of single incident beam system. a Dual-beam scattering
configuration, b Reference-beam configuration
14
2 Basic Measurement Principles
• Dual-scattered-wave configuration (Fig. 2.3a):
(2.4)
(2.5)
• Reference-beam configuration (Fig. 2.3b):
(2.6)
(2.7)
The measurement volume is defined in both cases using an aperture on the
detector, thus a virtual measurement volume is realized. These systems are not
commonly used, mainly because the small aperture required to limit the measurement volume also leads to a highly reduced intensity level of the detected
light and the difference frequency is dependent on the receiver position.
The more widely used optical configuration is based on two incident waves,
as illustrated in Fig. 2.4.
Figure 2.4a shows the so-called dual-beam configuration, in which areal
measurement volume is formed at the intersection of the two incident waves and
the scattered waves are detected with a single detector (vom Stein and Pfeifer
1969, Rudd 1969).
• Dual-beam configuration (Fig. 2.4a):
(2.8)
a
La er beam A"f,
b
x
Laserbeam }..,,f,
~
----------.~ ~~--~~--I~Z
x
Receiver -
z
\
Receiver
Laser bea m I.., ,f,
Laser bea m A, ,f,
Fig. 2.4a,b. Optical configuration for dual-incident-beam systems. a Dual-beam configuration, b Reference-beam configuration
2.1 Laser Doppler Technique
15
Figure 2Ab illustrates the reference-beam configuration, in which case the
detector is positioned directly in the path of one of the beams (e pr = e 2 ). Typically the incident reference beam is much lower in intensity than the incident
scattering beam (5:95). This configuration is seldom used; however, it does show
some advantages for measurements in highly absorbing media.
• Reference-beam configuration (Fig. 2.4b):
(2.10)
(2.11)
Noteworthy is the fact that the difference frequency is independent of the receiver position for the dual-beam configurations in Fig. 2.4. If the intersection
angle of the two beams is denoted by 8, then the difference frequency on the
detector is given by
I I
_ 2 sin <:%
- 2sin<:%
fD- - - v p cosa----vp.L
Ab
(2.12)
Ab
as clarified also in Fig. 2.5.
The flow direction a is measured with respect to the perpendicular of the
beam bisector. Thus the frequency difference is linearly proportional to the velocity component in the x direction, denoted by v p.L or v px'
For very small tracer particles, the very illustrative fringe model can be used
to explain the measurement principle of the laser Doppler technique. This
model is based on the spatial energy density in the measurement volume, as de-
n = e, -
Cl
= 2sin o/, e,
Fig. 2.5. Vector relations relevant to determining the Doppler frequency
16
2 Basic Measurement Principles
scribed by the following. A linearly polarized homogeneous electromagnetic
wave can be described with the electric field vector (see section 3.1.1.1)
(2.13)
or in complex number notation
(2.14)
where Wb is the angular frequency, k b is the wave vector in the wave propagation direction of the laser light having a wavenumber of kb = 2n I Ab' e E is a unit
vector (orientation of polarization) and Bo the amplitude of the electric field, r
is a vector defining an arbitrary point in space, where the electric field strength
is to be determined, and rpb is the phase of the electromagnetic wave at the origin and for time t = o.
If the two incident beams are of equal intensity, with a polarization perpendicular to the x-z plane in which the beams symmetrically lie, then the fields can
be described by (see Fig. 2.6a,b)
Ql = B o exp(j [wbt- kb(xsin %+ zcos%)+ rplJ)
(2.15)
Q2 = B o exp(j [wbt- kb(-xsin %+ zcos%)+ rp2])
(2.16)
The electric field in the intersection volume of the laser beams crossing with
intersection angle of is given by the superposition (see Fig. 2.6c)
e
(2.17)
The energy density, see Eq. (3.27), of the electromagnetic field in the measurement volume is given by
w= t:B 2
= 4t:B o2COS 2(k bxsin 19/2/ -
2(w t-k zcos19/+ rpj +rp2)
rpl-rp2)COS
2
b b
/2
2
(2.18)
This energy density in the measurement volume can be interpreted as a wave
propagating in the z direction with an amplitude modulated in the x direction of
4t: B 2cos 2 (k
o
b
x sin 19/
_ rpj -2 rp2 )
/2
(2.19)
The intensityl of the electromagnetic wave is obtained by time averaging over
one period
I
Hecht (1998) p.49: "In the past physicists generally used the word intensity to mean the
flow of energy per unit area per unit time. By international, if not universal, agreement,
that term is slowly being replaced in optics by the word irradiance". Both terms come
into use in this book but theyalways refer to the same quantity.
2.1 Laser Doppler Technique
17
1T
with
(JU») =- f!(t) dt
(2.20)
Ta
In complex form, the averaging reduces to a multiplication with the conjugate
complex value
~*), yielding for the intensity when both phases are equal
m·
rpj = rp2 = rp
1= cC(E 2) = ccgg* = c(w) = 2ccE~ cos2(kbxsin~)
(2.21)
Electric field strengths of incident waves
E,
=E. cos(ro.t-k.(-xsin 0/, + 2 cos o/,»)
b
,------~~x
Electric field strength in the intersection
area ofthe incident waves
Intensity proportional to the temporal
mean of the electric field strength
1= EC E~ cos' (k b x sin 0/,)
E=E, + E,
- p. .~
- ,. .~~
2
Fig. 2.6a-d. Generation of the interference structure of two homogeneous waves.
a,b Electric field strength of incident waves, c Superposition of electric fields, d Intensity
18
2 Basic Measurement Principles
I=t:cE~ [ 1+eos(
2sin'7i J]
21tT,X
(2.22)
The spatial dependenee of the intensity in the interseetion volume ean be interpreted as an interferenee field with fringes parallel to the y-z plane (Fig. 2.6d,
see also seetion 5.1, Fig. 5.14). The fringe spacing is given by the argument of the
eosine function in Eq. (2.22) above:
L1x=~
(2.23)
2 sin '7i
If the position variable x is now replaeed by x
= v pJt, Eq. (2.22) beeomes
(2.24)
whieh offers a very physieal interpretation of Eq. (2.12). A small particle
d p «L1x passing through the interferenee pattern effeetively sampies the loeal
intensity, whieh is eonstant over its diameter. A particle of diameter d p pereeives
a mean power of
1t
2
d p «Ab
P"",IAp ""'I-d,
4 p
(2.25)
and seatters this power in all spaee. The scattered wave is modulated in its amplitude and has the carrier frequency of the laser beam. Therefore an eleetrieal
signal i(t) is obtained from the photodeteetor, whose amplitude is modulated
with the differenee frequeney fD. The frequeney fD is ealled the Doppler frequeney (Eq. (2.12», but refers to the differenee between the two Doppler shifted
waves.
(2.26)
(2.27)
The velocity eomponent perpendieular to interferenee fringes is then inversely proportional to the period of the fringe erossing TD ,
L1x
VP.L=y
(2.28)
D
For different phases, (jJj and (jJ2 in Eqs. (2.15) and (2.16), the interferenee
pattern is only shifted in the x direetion or in time for the signal obtained from a
moving particle
(2.29)
2.1 Laser Doppler Technique
19
Note that this 'interference' or fringe model of the laser Doppler technique is
strictly only valid for very small particles fulfilling the condition d p «Ab' since
only then can the amplitude and phase, or the intensity of the field be considered constant over the partide diameter. The partide interacts with the field and
generates a scattered field of strength proportional to the sum of the individual
field strengths, as expressed by Eq. (2.17). The energy flux c(w) is equal to the
intensity at the photodetector. The photodetector averages the power density
tempo rally due to its finite response time (section 3.2.5) and integrates the intensity spatially over its photosensitive surface. The electric signal obtained
from the photodetector is directly proportional to the spatial energy density in
the intersection volume. The small partide effectively sam pIes the local intensity
of the interference pattern in the intersection volume.
For partides larger than the wavelength oflight this model fails. Both the amplitude and the phase of the incident waves vary across the diameter of the partide. Effectively the partide images certain parts of the incident waves onto the
photodetector, as interpreted in terms of geometrical optics in Fig. 2.7.
Thus only certain areas of the partide surface are involved in defining signal
properties. The position and size of the receiving aperture define the position
and size of these interaction areas. The area of the first interaction with the field
is known as the "incident point" and the source area of the scattered wave is
called "glare point" (Fig. 2.7)1. The size of the incident areas I "points" and glare
areas I "points" is proportional to the size of the detection aperture.
Figure 2.8 pictures the reflective and refractive glare points on the surface of a
water droplet for detection at 30 deg.
The scattered waves detected by the receiver each have an amplitude, which
depends on the position of their glare points. Each is proportional, through the
scattering functions ~" ~2 (chapter 4), to the field strength at the incident
points.
~o exp(j Cj)" + 1jI,,)
lio :r cxp(j Cj)"+ IjI ,, +1jI'2')
~
Fig. 2.7. Signalorigin for large particles
1
Correctly speaking the names incident point, glare point and interaction point can only
be used for a point-like receiver. For receivers with a finite size aperture, these points
become areas. However, according to convention, the term point will be used for both
situations throughout this book.
20
a
2 Basic Measurement Principles
With background illumination
b
Fi rst-order refraction [rom
background ill umination
c
Without background illumination
Particle outline added for
clarity
d
I neident laser
Glare I ineident point
retlection
Background
illumination
(neident point
refraction
\ Glare point
refraction
Fig. 2.8a-d. Glare points on a water droplet in air IJ, = 30 deg. a With background illumination, b Without background illumination and with the shape of the partide indicated,
c Schematic configuration of camera and light sources, d Light paths and generation of
incident points of reflection and refraction
Depending on the shape of the particle and the different propagation directions of the incident beams, phases at the incident points are different for each
beam (lPlr' lP2,)' and according to the particle material and different locations of
the glare points, an additional phase shift for each wave can result, (VIIr' Vl2r).
The field strength on the detector arising from each incident beam is then
(2.30)
2.1 Laser Doppler Technique
21
(2.31)
For very small particles the glare points merge, and shape or material induced
phase shifts vanish «(jJ2r - (jJlr = (jJ2 - (jJI' 1f/1r -If/ 2r = 0), yielding the fringe model.
In contrast, for larger particles the scattered waves interfere on the surface of
the photodetector as shown in Fig. 2.7. Thus, the measurement volume is virtual
and only exists for the photodetector. In a manner similar to Eq. (2.29), the signal from the detector is given by
i(t) - ce E~ [ 1+ cos( 2rcfvt- (jJlr + (jJ2r -If/lr + If/2r)]
(2.32)
which is still modulated by the Doppler frequency. The main difference to the
small particle result is the added phase shift differences 1f/2r -If/lr and
(jJ2r - (jJlr =j:. (jJ2 - (jJI· In comparison with Eq. (2.29) the fringe pattern is shifted in
phase. However, this phase shift is of no consequence because the exact phases
of the incident beams at the time when the particle is at position x p = 0 are not
known anyway. When the particle traverses across the measurement volume the
interference pattern moves across the detector surface. Equations (2.26)
and (2.29) remain valid.
The optical arrangement discussed above yields the velo city component normal to the interference fringes; however, its sense is no longer contained in the
received signal. The two particles shown in Fig. 2.9a, moving with equal but opposite velocities through the measurement volume, will generate the same electrical signal on the detector. Directional information is recovered when incident
laser beams of different wavelengths are used. A wavelength shift of one or both
of the laser beams can be achieved using acousto-optic modulators (Bass 1995,
Vol. 11 Chapt.12), for example Bragg cells (Chang 1976) (see section 3.2.3.2). If
an acousto-optic modulator is mounted in the path of beam 1, the frequency of
the beam can be shifted by an amount f'h' yielding
fl = fb + f'h
or
fl = fb - f'h
(2.33)
Since the frequency fis the derivative ofthe phase with time
f=_1 d(jJ
2rc dt
(2.34)
for a stationary wave the frequency shift can be expressed as a linear change of
phase with time
(2.35)
In the fringe model this corresponds to a movement of the fringes in the -x
or +x direction with a constant velo city. After the optical mixing of the two
scattered waves on the detector surface, the modulation for the configuration in
Fig. 2.4a becomes
(2.36)
22
2 Basic Measurement Principles
Thesignal frequency exhibits an offset equal to the shift frequency. A stationary particle will result in a signal with a modulation of f'h. A particle moving
with the fringes yields a lower frequency and movement against the fringes, a
higher frequency (Fig. 2.9).
Strictly speaking the shift frequency changes the wavelength of the light and
thus, the light scattering properties of the particle. However this change relative
to the frequency oflight is so small (1:10 12 ) that it can be neglected.
A conventionallaser Doppler optical arrangement is summarized in Fig. 2.10.
The laser beam is split into two beams of equal intensity and polarization using
a beam splitter and brought to intersection with a lens. A collimator is used for
adjusting the beam properties in the measurement volume and the Bragg cell
provides a frequency shift used for the directional sensitivity. The Doppler frequency is determined using a signal processor and the data analysis for computing flow properties is performed in a computer.
The actual realization of these components in a measurement system can be
extremely varied, involving for instance optical fiber transmission between the
laser and the focussing optical components. Several such systems operating at
different wavelengths can be integrated into a single optical arrangement to
yield several flow velo city components simultaneously. Further illustrations of
practical systems are given in chapter 7.
a
Fig.2.9a,b. Explanation of the frequency shift technique for directional sensitivity.
a Without frequency shift, b With frequency shift
Laser
Trdn mi l1ing len
Collima lor
Rccci ver probe
C mpcn 31ion
gJass or bragg cell
Fig. 2.10. Dual-beam laser Doppler anemometer
1\
volume
2.2 Phase Doppler Technique
23
The laser Doppler technique sampies the flow velo city at discrete times corresponding to the passage of a partide through the interseetion volume. The velocity sampled at these times can be considered as a primary measurement
quantity. The derivation of flow parameters or secondary measurement quantities, such as mean flow velo city, turbulence level or turbulence spectra, requires
further data processing. The details of this data processing and in particular the
means to achieve a given accuracy of the secondary quantities are the subject
matter of chapters 10 and 11.
2.2 Phase Doppler Technique
The identification of spatial structures within the measurement volume will
rely either on time delays or phase differences and this necessitates detectors at
two or more positions in space. For homogeneous spherical particles only one
parameter must be deterrnined, the diameter of the partide. For this the minimum of two detectors is already sufficient, using either time delays or phase
differences.
The standard arrangement for the phase Doppler technique is shown in
Fig. 2.11 (Durst and Zare 1976, Flöge11981, Baudmage and FlögeI1984, Bachalo
and Houser 1984). The incident beams correspond to the same optical arrangement used in the laser Doppler technique. The two detectors are positioned out
of the plane of the incident beams at an angle rfJr' usually known as the off-axis
angle. The detectors are also placed symmetrie out of the y-z plane by the angles
±If/ r' the elevation angles.
The analysis begins with the signal given in Eq. (2.32). For very small partides, which effectively sampie the interference pattern in the intersection vol-
Receiver
probes
Receiver front lens
y
x
1tan mil1er probe
direClion
Fig. 2.11. Optical arrangement for the phase Doppler technique
24
2 Basic Measurement Principles
ume, both detectors yield the same signal phase. This corresponds to the glare
points on the surface of the particle merging with one another. In this case, no
useful measure of particle size is possible using the conventional phase Doppler
optical arrangement.
For larger particles, the situation as depicted in Fig. 2.7 is valid and the phase
difference Ll4'12 between signals received on detectors 1 and 2 will depend on
the respective path lengths of the two beams to the two detectors (4 paths involved) hence, on the particle diameter. A further phase difference will arise due
to composition (refractive index) of the particle. Since the positions of the four
incident points and the four glare points are determined by the positions of the
detectors, a further index must be fore seen for each detector being considered.
The signals at the detectors are given by (index br; b beam 1 or 2; r receiver
1 or 2)
i l (t) - ecEH1+ co, 21tfDt - (<<P11 -«P21 + '1'"11 -'1'"21)])
(2.37)
(1+ cos[ 21tfDt - (<<P12 -«Pn + '1'"12 -'1'"22)])
(2.38)
i2(t) - ec E~
for detectors 1 and 2 respectively. For the particle structure identification only
the alternating (modulated) component (AC) of the signals is of relevance
iIAC(t) - ecE~ cos[ 21tfDt-(<<P11 -«P21 + '1'"11 -'1'"21)] = ecE~ cos( 4'1)
(2.39)
i2AC (t) - ecE~ cos[ 21t fDt -( «P12 -«P22 + '1'"12 -'1'"22)] = ecE~ cos( 4'2)
(2.40)
The signals again exhibit a Doppler frequency, whereas the particle characteristics and the detector position influence the relative phase.
The phase Doppler technique employs the phase difference of two signals
,14'12' received at the same time for both detectors
(2.41)
which arises for all particles, dependent on shape and composition. The first
term in Eq. (2.41) is influenced by the shape of the particle. The second term is
dependent on both shape and composition (refractive index). The phase difference is, therefore, influenced in the case of reflection only by the shape of the
particle and in the case of refraction by the shape and composition and is independent of time or particle position. Equation (2.41), although derived using
plane waves, is valid not only for all particle shapes and composition, but also
for both homogeneous and inhomogeneous incident waves.
The optical arrangement given in Fig. 2.11 allows the measurement of only
one free parameter, thus it is suitable only for the measurement of homogeneous, isotropic, spherical particles.
The remaining task is to determine a unique relationship between the phase
difference given in Eq. (2.41) and the shape and composition of the particle, as
well as specifying the necessary size and position of the detector apertures to
fulfIl this relation. These questions are addressed in sections 5.3 and 8.2. Cleady
the advantage of the phase Doppler technique lies in the fact that size (and ve-
2.3 Time-Shift Technique
25
locity) can be measured for each individual particle and furthermore, that no
calibration is required.
2.3 Time-Shift Technique
The time-shift technique is a further measurement principle which has application to particle sizing. This technique was first introduced by Albrecht et al.
(1993) and is possible only when the particle has a well-defined curvature, e.g.
spherical or elliptic, and when the particle is larger than about one third of the
illuminated measurement volume. These conditions are often met when measuring with a phase Doppler system and indeed, the time-shift technique can be
realized with exactly the same hardware. The measurement principle will be
briefly introduced in this section and further details about its application in
measurement systems will be given in the seetions 5.3.4 and 9.2.
The time shift is an effect which arises solely from an inhomogeneous illumination of the particle. No time shift between signals arises if the particle is illuminated with homogeneous waves. The basic principle of this technique can be
illustrated by considering a single laser beam illuminating a moving particle.
The situation is illustrated in Fig. 2.12, which shows the particle at several positions within the illuminating beam and the detected light intensity due to light
reflected by the particle. The intensity is shown for two different receiver collection angles. In time, receiver 1 attains a maximum signal intensity before receiver 2. Otherwise, the signals are expected to be identical and they represent a
simple imaging of the incident wave by the particle onto the detector. Thus, the
two signals will be shifted a time Llt with respect to one another.
Because the positions of the incident points on the particle surface are a
I
v
Moving parlide
"/
I
I
" ~\.Receiver I
I
-.
Dclcclcd signals
" ~ r-r,
I
~I
I,( I\.
I
,
I"
"'"
Intcnsily profile of
incident wavcs
-- I
Receiver 2
~
Fig. 2.12. Origin of the time shift for reflection caused by an inhomogeneous illumination
field
26
2 Basic Measurement Principles
function of the particle size, it is clear that the magnitude of the time shift will
also be a function of the particle size. This function is monotonic and calculable
for the case of spherical particles. Thus, the time-shift technique requires two receivers and provides particle size information if also the velo city of the particle
is known. The velocity allows the measured time shift of two signals to be expressed as an effective measurement volume displacement. For this reason the
time-shift technique is best combined with a conventionallaser Doppler system
for velocity measurement and can use exactly the same hardware as the phase
Doppler technique. However, a more detailed analysis in section 9.2 will show
that appropriate receiver positions for the time-shift technique may be different
than those for the phase Doppler technique.
The measurement volume displacement as basis of the time shift between
signals has been previously exploited in other optical configurations. Pavlovski
and Semidetnov (1991) and Lin et al. (2000) use the time shift between singlebeam signals from two detectors and measured the velo city with a laser transit
velocimeter. The technique was called the pulse displacement technique. Hess
and Wood (1993) used alaser Doppler configuration and the time shift between
different scattering orders on one detector and Onofri et al. (1996) recognized
the time shift between signals as an additional source of size information in the
dual-burst phase Doppler technique. Nevertheless, the technique has not yet
been realized in a commercial instrument.
The above explanation of the time-shift technique is based on the light reflected from the particle. In fact, a similar effect arises from other components of
scattered light and this leads to a number of possible enhancements to conventional phase Doppler systems. These possibilities are discussed in sections 5.3.4
and 8.2. Finally it is noteworthy that the magnitude of the time shift is independent of the incident beam intensity profIle. For small particles the time shift
is no longer weIl defined and the resolution is insufficient to perform size measurements.
28
3 Fundamen tals of Light Propagation and Opties
For a harmonie oscillator, Maxwell's equations can be simplified by using a
complex form for the field strengths, ~and H, where the underline denotes a
complex quantity and m is the angular frequency
curl!!=~+jm.Q,
divQ = P ,
~=K~,
curl~=-jm~
divB = 0
.Q=C~,
~=JL!!
(3.8)
(3.9)
(3.10)
For charge-free space (p=O), Eqs. (3.8) - (3.10) lead to two identical partial
differential equations for the two field parameters
AE+eE=O
(3.11)
AH+eH=O
- --
(3.12)
more commonly known as the wave equations of the electromagnetic fieId. Any
solution of these equations can be interpreted as a wave. The wavenumber k is
determined by the frequency of the wave and by the material properties of the
medium in which the wave is propagating. The relation between these parameters is known as the dispersion relation
1s. = ~ cJLm2 - jmKJL = mJiii
(3.13)
The propagation speed of an electromagnetic wave (speed of light) is determined by the material properties, which can be combined in the index of refraction n
1
Co
Co
Jiji
~crJLr
n
C=--=---=-
Co
=
1
~
=299,792,458 m s~
(3.14)
(3.15)
VcoJLo
From Eq. (3.13) a complex dielectric constant for a conducting medium
(K > 0 ) can be defined
.K
~=c-J­
m
(3.16)
Furthermore, the complex index of refraction is also deterrnined from these
material properties
(3.17)
The refractive index for several typical tracer particles used in flow studies is
given in chapter 13, Tab. 13.3.
Generally the refractive index is also frequency (wavelength) dependent. Dielectric constants are used when describing static electric fieIds, whereas the refractive index is used for optical applications. Furthermore, the refractive index
3.1 Electromagnetic Waves
29
can be dependent on the pressure and temperature. The temperature and frequency dependence of the refractive index of water is illustrated in Table 3.1
(Thormählen et al. 1985, Schiebener et al. 1990, Lide 1997 p. 10-257 and LanboltBörnstein 11/8 28512).
Generally only the relative refractive index is considered when studying the
scattering characteristics of small particles, for instance the ratio of a particle
refractive index!!:.p to that of the surrounding medium nm
(3.18)
To analyse spherical wave propagation, as is appropriate for the light scattering from spherical particles, it is advantageous to consider the solution of the
wave equations in spherical coordinates (r, rp, 0). The solution of Eqs. (3.11)
and (3.12) can be found in spherical coordinates using two scalar potentials. For
a scalar potential ll, Eq. (3.11) becomes
1 d2
--2
r dr
(rll) +
d (.
dll)
1
d2 II
2
smo- + 2 • 2
2 +k ll=O
r sm 0 dO
dO
r sm 0 drp
2
1
•
(3.19)
Indeed, in analyzing the laser Doppler and phase Doppler techniques, a number of different solutions of the wave equation are necessary and therefore, several of the important solutions are discussed below.
Tab1e 3.1. Temperature and wavelength dependence oi the reiractive index oi water
(pressure 1 bar, )
Temperature [Oe] Wavelength [nm]
0
20
40
60
80
100
257
Ar+
476.5
Ar+
488
Ar+
514.5
Ar+
632.8
532
Nd:YAG He-Ne
1.37454
1.37357
1.37067
1.36644
1.36117
1.35506
1.33824
1.33760
1.33522
1.33166
1.32718
1.32193
1.33759
1.33696
1.33460
1.33106
1.32660
1.32l37
1.33626
1.33564
1.33331
1.32980
1.32538
1.32021
1.33549
1.33488
1.33255
1.32907
1.32468
1.31953
1.33229
1.33162
1.32930
1.32585
1.32153
1.31649
1064
Nd:YAG
1.32782
1.32548
1.32176
1.31720
1.31205
1.30646
3.7.7.7 Homogeneous Plane Waves
The simplest solution of the wave equation results for a non-conducting medium (K = 0) in cartesian coordinates. It is easy to show by substitution that
f(t- ek·r / c) is a solution to the wave equation, where e k is an arbitrary unit
vector, r is a vector to an arbitrary point in the field and f 0 is an arbitrary
function. This solution describes a wave propagating in the direction of +e k with
a speed c. The argument of the function f, t - e k • r / c, is the phase of the wave.
All points lying on a arbitrary plane perpendicular to e k will have the same
30
3 Fundamentals of Light Propagation and Optics
phase for a given time and, therefore, this solution fulfills the conditions of a
plane wave. A homogeneous plane wave also requires that the solution value is
constant in every plane of a constant phase. The solution does not specify
changes of amplitude in the direction of e k for a constant time or time dependence of the solution value for a point in space.
Assuming a sinusoidal wave behavior in time and space, e.g.
cos[w(t -e k . r I c) I, Eqs. (3.11) and (3.12) lead to the following solutions for the
field strengths in complex form
(3.20)
Since the amplitudes ~o and Ho do not vary for constant phases, this solution
describes a homogeneous plane wave. Often only the phrase "plane wave" is used
for this specific time and spatial dependence. It is convenient to introduce the
wavevector
(3.21)
The magnitude k is known as the wavenumber and remains real for
(Eq. (3.13)). The wave in Eq. (3.20) can then be written as
l(
=0
(3.22)
The orientation of the electric field strength vector gives the polarization of
the wave, as discussed further in the next section. In Fig.3.1 a (homogeneous)
plane wave polarized in the x direction and propagating in the z direction is illustrated.
Substituting the solutions for the electric and magnetic field strengths
(Eq. (3.22)) into Maxwell's equations (Eqs. (3.8)-(3.10)), demonstrates that for a
x
Phase hunts
z
E(",t) = E., sin(w/ - k z)c,
Fig. 3.1. A homogeneous plane wave
3.1 ElectromagneticWaves
31
loss-free medium, the propagation direction, the electric and the magnetic field
are all perpendicular to one another
(3.23 )
Thus, the wave is designated as a transverse electromagnetic wave (TEM).
As an example, the equations for aplane wave polarized in the x direction
and propagating in the z direction are
g = Eox exp[j (OJt- kz)] e x
H
=
{fE
(3.24)
(3.25)
ox exp[j (OJt- kz)] ey
Since the electric and magnetic field strengths are coupled, it is generally sufficient to work onlywith the electric field strength.
The energy density Eq. (3.6) of this plane wave is given by
1
w=-(c:E 2+,uH2),
2
E=ml,
H=I!!I
(3.26)
Equation (3.26) allows the energy density to be expressed as a function of the
electric field only
(3.27)
and shows that the electric and the magnetic wave contain the same amount of
energy. The Poynting vector (Eq. (3.7)) is related to the energy density through
(3.28)
The energy present in space is transported spatially with the speed oflight.
Fluctuations of the energy density cannot be directly measured, since the inertia of electron emission in an optoelectronic detector prohibits such high frequencies to be resolved. Thus, a temporal averaging occurs, leading to the concept of intensity, being the temporal average of the Poynting vector
1 ,+T
J
(J(x))=- f(x)dx
T,
(3.29)
The complex notation for the electric field strength has the advantage that the
integration leads to a simple conjugate multiplication
1= Ce E.E'
2--
(3.30)
Note that in the literature, the argument in the exponential function in
Eq. (3.22) may take different signs. In the following discussion, a wave propagating in the positive z direction will be denoted by exp[j (OJt- kz)).
The results are briefly summarized. The wave
32
3 Fundamentals of Light Propagation and Optics
(3.31)
(3.32)
pro pagates in the z direction and is polarized in the x direction. The phase of the
wave at time t = 0 and location z = 0 is cp.
For a lossy medium (K:t 0), the wavenumber is complex according to
Eq. (3.13)
(3.33)
and the argument of the exponential function describing the electromagnetic
plane wave is also complex
(3.34)
The real part of the exponential function describes the wave damping and the
complex part describes the harmonic oscillation.
If aplane wave, propagating in a loss-free medium 1 is perpendicularly incident on an interface to a lossy medium 2 (K:t 0), the wave will be exponentially
damped in medium 2, depending on the conductivity. If the medium 2 is not too
thick, then the wave emanates from the medium 2 with a finite measurable amplitude. This essentially describes transparency or opaqueness of the material.
Highly conductive materials, such as metals, are opaque for modest thickness,
whereas purely dielectric media are transparent. Since the damping factor ßk is
related to the frequency, the transparency of the medium is also related to the
wavelength.
3.1.1.2 Spherical Waves
In many laser Doppler and phase Doppler applications, the sphericity of the
particles is assumed and thus, solutions of the wave equation in spherical coordinates are desirable. The particles act as a source for spherical waves. A general
solution of the wave equation in a spherical co ordinate system (Eq. (3.19» is
given by
II = -C {~n(kr)} Pnl( cos iJ ){sin(lCP)}
kr Sn (kr)
cos(lcp)
(3.35)
where the curly brackets indicate that either function can be chosen. Both 1 and
n are integers, originating from the separation ofvariables in Eq. (3.19) and Cis
an arbitrary amplitude. The functions ~n(kr) and Sn(kr) are the Riccati-Bessel
functions of the 3rd kind and of order n and P~ (cos iJ) are the associated Legendre functions of order n (see section 4.1.2 and Appendix).
In general, the electric and magnetic field strengths can be computed from
two scalar potentials IIj and II 2 given by Eq. (3.35). For each potential the radial component of either the magnetic or electric field strength vanishes (van de
Hulst 1957,1981, Kerker 1969, Bohren and Huffman 1983). Each pair ofintegers
3.1 Electromagnetic Waves
33
n and 1 eorresponds to a spherical partial wave. The Legendre functions and the
sine and eosine funetions eontain the angular dependenee of the spherieal wave,
whereas the radial dependence is expressed by the Rieeati-Bessel functions. Arbitrary eleetromagnetie waves ean be specified by an appropriate superposition
of partial spherieal waves and choice of their amplitude. It is important to note
the asymptotie behavior of the Rieatti-Bessel functions. For large values, these
functions ean be approximated with an exponential funetion having a eomplex
argument
r
exp( -j kr)
for
kr ~ oe
(3.36)
(n(kr) "" j"+l exp( +j kr)
for
kr ~
(3.37)
';n(kr) ""
1
00
This argument already appeared in a similar form in Eq. (3.22) far homogeneous
waves. A wave with exp(-jkr) propagates in the positive radial direetion,
whereas exp( +jkr) indieates a wave propagating in the negative radial direction.
For the simplest ease of n = 0 and 1= 0, two solutions for a potential are obtained, one expanding in the positive radial direction
I l1 = ~r exp[-j(kr+;7i)]
(3.38)
and one eontraeting in the negative radial direetion
Il2 =
~ exp[+j(kr+;7i)]
(3.39)
For spherieal waves, the amplitude decreases with 1/ (kr) in the positive radial
direetion. Furthermore, the simple waves of Eqs. (3.38) and (3.39) have a eonstant phase of +1t /2. The amplitude of these simple waves goes to infinity for
r=O.
In the laser Doppler and phase Doppler teehniques the detector is generally
positioned in the far field and thus the wave amplitude decreases inversely with
radius from the measurement volume. This means the intensity and the signal
amplitude, deereases with the square ofthe inverse radius.
A solution of the wave equation for a homogeneous plane wave incident on a
homogeneous, spherieal partide will be diseussed in detail when presenting the
Lorenz-Mie theory (seetion 4.1.2).
3.1.2 Polarization
A homogeneous plane wave propagating in z direction ean have two field components perpendieular to the propagation direetion k = ezk
(3.40)
This equation can be interpreted as the sum of two independent partial waves
with orthogonal field eomponents and a relative phase shift cp x - cp y
34
3 Fundamentals of Light Propagation and Optics
gx = Eox exJ{j( wt - kz + qJ J]
(3.41)
gy =Eoyexp[j(mt-kz+qJy)]
(3.42)
The polarization of the waves is given by the orientation of the vector
is expressed more conveniently by rearranging Eqs. (3.40) - (3.42) as
~.
This
(3.43 )
(3.44)
In the Ex -E y plane the trace of the vector tip
1980, Born 1981, Bass 1995, Vol. I Chapt.5)
~
is given by (Born and Wolf
+[~)2
-2~~COS(qJy
-qJx) = sin 2
(qJy - qJx)
( ~)2
Eox
Eoy
Eox Eoy
(3.45)
which is the equation of an ellipse with the major axis orientated at an angle
_ 1
(2EoXEOY cos(qJy -qJx)]
2
2
Eox -Eoy
a - -arctan
2
(3.46)
Depending on the phase difference LlqJ = qJ y - qJ x and the amplitudes of the partial waves Eox and Eoy ' a right or left circular polarization, elliptical polarization
or a linear polarization can be obtained.
Light with various states of polarization is shown in Fig.3.2. Elliptically polarized light arises when the phase difference of the two waves is LlqJ"* mt /2
(Fig.3.2c) or in the case of different amplitudes when LlqJ = n1t (Fig.3.2d). If
both of the waves are completely out of phase LlqJ = (n + l'i)1t, the major and minor axes lie on the Ex and Ey axes. Equal amplitudes result in circularly polarized light when LlqJ = (±l'i + n)1t (Fig. 3.2b). Linearly polarized light arises when
LlqJ = n1t (Fig. 3.2a). Every linearly polarized homogeneous plane wave created
by two partial homogeneous waves can be transformed into only one partial
homogeneous wave by rotation of the coordinate system around the z axis.
The polarization of scattered light from the particles is affected by reflection
and refraction. The polarization state of the incident light and the received light
can also be altered using polarizers or polarization filters in the transmitting and
receiving optics. A half-wave plate preferentially retards one of the waves by 1t
and thus rotates linearly polarized light by 1t /2 or changes the rotation direction of circularly polarized light. A quarter-wave plate retards one wave by 1t /2
and thus transforms linearly polarized light into circular polarized light or circular polarized light into linearly polarized light (see section 7.2.2). Note that
only light oflike polarization can exhibit interference.
3.1 Electromagnetic Waves
35
Fig. 3.2a-d. Polarized light. a 45 deg linear, b Right hand circular, c Left hand 45 deg elliptical, d Right hand 0 deg elliptical
3.1.3 Boundary Conditions and Fresnel Coefficients
According to Maxwell's equations, the tangential component of the field
strength of both the electric and magnetic fields must be continuous at an interface between a medium 1 and a medium 2. This is a fundamental boundary
condition which must be invoked when the interaction of electromagnetic fields
with matter is considered and is paramount for the computation of light scattering from small particles.
Generally, the incident wave E(;)(r,t) in medium 1 is known. After interaction
with some optical inhomogeniety (medium 2), the reflected or scattered wave
E(r)(r,t) in medium 1 and the transmitted wave E(t)(r,t) in medium 2 are sought.
These three waves are related at the interface through the boundary conditions
(3.47)
For a homogeneous plane wave impinging on an interface with the normal
vector n I the electric field strength can be given in complex notation as
n I x~~) exr[j (mt-kU) .r)]+n I x~~) exp[j(liJt-k(r) or)]
(3.48)
36
3 Fundamentals of Light Propagation and Optics
The boundary condition also specifies that the three wave vectors k U), k(r)
and k(t) alllie in the incident plane. If the angles between these vectors and the
normal are designated by (Ji (incident angle), (Jr (reflection angle) and (J, (refraction angle), the laws of reflection
(J ,
= (J r
(3.49)
and refraction
(3.50)
follow. Furthermore, the ratios between the complex incident amplitude of the
incident wave m~) and the reflected m~l) and refracted m~l) waves can be derived. These relations are known as the Fresnel equations and are dependent
also on the polarization. For a wave polarized perpendicular to the incident
plane the reflection and refraction amplitude coefficients are given by Hecht
(1998) and Born and Wolf (1999)
n
_ I COS(Ji
J11
n
_=.Lcos(J,
J12
(3.51)
n
1 COS(Ji
2-
J11
n
_ I COS(Ji
J11
(3.52)
n
+=.Lcos(J,
J12
For a wave polarized parallel to the incident plane these coefficients are
r =
-11
(E(rl]
tJ:. 2
-cos
= J12
_0
E Ul
_0
11
(J
i
n
=.LCOS(Ji
J1 2
_0
(J
n
+_1 cos(J,
J1 1
(3.53)
n
1 COS(Ji
2_
(E('l]
t ll = E~i)
nl
--cos ,
J11
J11
11
(3.54)
tJ:. 2 cos(J , +!'lLcos(Jt
J12
J11
The conductivity of the medium can be accounted for in the complex refractive
index.
The Fresnel (amplitude) coefficients are complex, the magnitude pertaining
to the amplitude and the phase giving the phase shift of the electric field.
The intensity of the reflected and transmitted wave can be computed from the
reflectance Rand transmittance T. Splitting the wave into the two components
parallel and perpendicularly polarized to the incident plane the factors become
RII.-L--P
-Ir 12
(3.55)
3.1 Electromagnetic Waves
T:
-.6. 11
II,.L - n1
2 cosB,
112 cosB;
It 1
2
37
(3.56)
-II,.L
when the case of total reflection is excluded. The sum of reflectance and transmittance must adhere to energy conservation, i.e.
(3.57)
thus, it is sufficient to specify either one to determine the intensity. For the special case of total reflection (B; > arcsin(n 2 I n 1), n2 < n1 ) Eqs. (3.55) to (3.57) are
not valid. For this case the reflectance becomes unity, R = 1, and the transmittance vanishes, T = 0 (Born and Wolf 1999).
Example reflectance and transmittance are given in Fig. 3.3 for an air/glass
interface as a function of incident and refraction angle. For incident waves perpendicular to a surface (B; = 0 deg), 4% of the intensity is reflected on the surface. Therefore, each uncoated surface in an optical system results in an energy
loss of 4%.
30
0
-"
u
"
8, [deg]
Rerfraction angle
1.0 t=--=---=----=----~--~~-:;=:--~-~-_::_::_--:.-=:.--=----=---=='----=---------....;;,:;---------------------------
-- ..... - ---
.8
.~
-- - - - -- - - --
"...'"
I:-<
"u
"
.8
u 0.5
--
Reflectance parallel polarization
Reflectance perpendicular polarization
Transmittance parallel polarization
Transmittance perpendicular polarization
,,
- - - - -- - - - - - -- - - - - - -- - - - - - -- - -- - - - - - -- - - - - - -- - - - - - -- - -- - - - - --- - - - - - -- - - - - - -- - - -- -
~
,
"
"
0:=
~
,
.... -- - --
,,'
,.""
---
\
\
R.L "
.'
............ #' ................ ...
........ - .............. - ..
0.0
~--------------=--....- -~-- =~=--~---~~=~=:~----~-=~~---~--~~~~~~--=---=--=--~----~--~--------- -------- -- ---:-=,=
o
45 Brewster angle Incident angle
Fig. 3.3. Reflectance and transmittance for an air/glass interface (n,
8, [deg] 90
= 1, n, = 1.5, f.l, = f.l,)
3.1.4 Laser Beams
Certain characteristics of laser beams make them indispensable for the laser
Doppler and phase Doppler techniques. The choice of wavelength and power
depends on the application, although for practicality, visible wavelengths are
generally preferred. The necessary laser power for a desired signal power may
depend on many factors, including flow velo city, scattering efficiency of the
particles, position and focallength of the receiving optics and also the flow me-
38
3 Fundamentals ofLight Propagation and Optics
dium. Due to the central importance of the laser beam, which is also a solution
of the wave equation (3.11), a more precise description of its properties will be
given.
3.7.4.7 Physical Charaderistics of a Laser Beam
In a laser (Light Amplification by Stimulated Emission of Radiation) two basic
physical processes are exploited: stimulated emission, which leads to a high degree of monochromatic light and the amplification of the radiation in an optical
resonator, which leads to high power densities and a long coherence length with
small divergence angle.
Four lasers are in general use for measurement systems: the gas laser, the
semiconductor laser, the solid-state laser and the fiber laser (Table 3.2). More
details about each of these laser types can be found in the literature (Milonni
and Everlyn 1988; Koechner 1992; Siegman 1986; Kleen and Müller 1976, Svelto
1976, Bass 1995 Vol. I Chap. 11, Eichler and Eichler 1998, Czarske et al. 1997,
Czarske 2002).
For laser measuring techniques, the important parameters include wavelength, line width, power and coherence length. In some cases the physical dimensions of the laser may be of importance. In recent years a trend from gas lasers to semiconductor lasers can be observed, as the power density of the latter
increase. Similar small dimensions and low power consumption are also afforded by the Nd-YAG laser. The bandwidth given in Tab. 3.2 arises mainly due
Table 3.2. Typical parameters of lasers suitable for laser Doppler and phase Doppler applications (linewidth/coherence length given for single mode emission)
Wavelength
Color
Bandwidth
of gain
[GHz]
Linewidth 1 Power
Coherence
length
[MHz] 1 [m] [W]
red
1.6
300/1#
0.5xlO- 3 ••• O.051.0
0.5
ultra violet
violet
4
blue
green
400010.07
5x10 3 •• .20
(allIines)
1.5
1
red
100* 13#
0.2XlO-3 ••• 1
~1.5
0.001...0.3
~1.1
<1
[nm]
Gas lasers:
He-Ne
Ar+
632.8
257
476.5
488
514.5
Solid -sta te lasers:
Laser diode 640 ... 690
Nd:YAG
1064
532 1
infrared
green
Fiber lasers: 1030 ... 1130 infrared
~p-conver- 635
slOn
red
100
120
<1/300#
~3000
~744
0.0001
3 ••• 100
5x10
0.001...10
0.1...110
0.1
Beam
quality
factor
M 2 [1]
Amplitude
Noise
[% ]
~1
<1.1
~1
1 Frequency doubled; # Note: single-mode emission (at low power); * 10 MHz; 3m (for
DBR resonator); 2600GHZ; 200llm (for multi-mode emission)
3.1 Electromagnetic Waves
39
to spontaneous emission and is therefore a function of the laser medium used.
Depending on the quality of the resonator and the stabilization, small bandwidths ofthe emitted light and coherence lengths of some millimeters up to several kilometers are available.
3.7.4.2 Mathematica/ Description ofthe Gaussian Laser Beam
A mathematical description of the laser beam is essential for the layout of laser
Doppler and phase Doppler systems. It arises from the solution of the wave
equation (3.11) for the field strength, given the boundary conditions as dictated
by the physical construction of the laser.
Gas lasers have axissymmetric resonators. The laser light is emitted at one
end through a half-silvered mirror and the polarization is determined by the
orientation of a Brewster window at the other end. Typical apertures placed
within the resonator lead to a monochromatic beam of narrow wavelength line
width and with a Gaussian distribution of the intensity, as is illustrated in
Fig. 3.4. The beam waist typically lies at the output mirror. Describing a laser
beam as an electromagnetic wave, the electric field strength for the wave propagating in the Zb direction and linearly polarized in the Yb direction is given by
(Kogelnik and Li 1966; Davis 1979; see also Appendix)
(3.58)
where the components are
(3.59)
(3.60)
and
2
1 == nrwb
Rb
A
(3.61)
b
is denoted as the Rayleigh length on the Zb axis. The electric field amplitude of
the wave decreases by .J2 relative to the maximum amplitude at Zb == O.
EOb is the amplitude of the electric field in the center of the beam at the waist
(origin). The amplitude isafunction of the input laser power and the beam waist
radius, given as
(3.62)
40
3 Fundamentals ofLight Propagation and Optics
P(x,.y,.-,,)
Gaussian ficld
1..
E, E,
E
e
E
_l
EOl
I
I
2"
I
e.fi.
e 1 decay of field slrenglh
(e · dccay of inlensily)
relative 10 -' axis
Fig. 3.4. The Gaussian laser beam
In Eq. (3.59) the amplitude is complex because the laser beam can have a
phase unequal to zero at the origin
(3.63 )
The longitudinal Zb component of the field is now necessary because the wave
no longer has a homogeneous field distribution perpendicular to the propagation direction. The Zb component generally has no relevance for light scattering.
The beam propagation can be described by its radius
(3.64)
defined by the width at which the intensity falls to e-2 of the maximum value on
the axis (e- 1 of the wave amplitude). At Zb = 0 the beam exhibits a minimum
width or beam waist of radius rwb '
Constant phases are obtained on circles with radius Rb around a virtual origin ZR on the Zb axis, as illustrated in Fig. 3.5. For positions Zb > 0 the origin is
located at ZR <0 and for negative coordinates, Zb <0, the origin will be ZR >0.
The wavefront curvature Rb depends on the Zb position
(3.65)
where
is the virtual origin of the wave on the Zb axis. In the near field
a Gaussian intensity distribution with plane wavefronts is obtained
(ZR --7 ±oo). The phase in the far field can be described by a spherical wave. The
arctangents in Eq. (3.59) converges for large Zb to 1t /2 and gives a phase offset
ZR
(Zb «lRb)
3.1 Electromagnetic Waves
41
Fig. 3.5. The beam and wave coordinate system
between the far and the near field. The phase offset ean be interpreted as a phase
jump in the foeus point (waist) of the beam, known from geometrieal opties
(van de Hulst 1981 p 207).
While Rb expresses the wavefront eurvature on the Zb axis, Rw gives the radius at an arbitrary point in spaee
R w =Jx; + Y; +(Zb
-zS
(3.66)
and should be used instead of Rb(Zb) in Eq. (3.59). The orientation
eXbxb +eybYb +eZb(Zb -ZR)
e w = sgn (Zb ) -----;=========~
~ x; + Y; + (Zb - ZR)2
(3.67)
gives the loeal propagation direetion at this point. These relations are useful for
defining an ineident homogeneous plane wave for a small particle, whose amplitude is the loeal amplitude of the laser beam at the particle position
.J E~b + E;b and whose propagation direetion is such that there is no longitudinal
eomponent of the wave.
A loeal wave co ordinate system arises using a rotation through the angle rfJ w
about the x b axis and a rotation through the angle lfI w about the Yb axis.
m =aretan~
'l'w
R '
b
x
b
lfI = aretan-
w
Rw
(3.68)
Further relations are
(3.69)
ab is the half divergenee angle in the far field. At the Rayleigh length lRb' the
beam radius beeomes .J2 rwb and the intensity is half of the maximum value in
42
3 Fundamentals of Light Propagation and Optics
the waist center (see Fig. 3.4). The geometry for the Gaussian laser beam can always be described by two parameters, for instance wavelength and beam waist
radius, half divergence angle and Rayleigh length or a combination of these four
parameters. Figures 3.4 and 3.5 illustrate the various parameters of a laser beam.
So me simplifications of Eq. (3.59) are possible using the amplitude factor FG
and the phase value ([JG in comparison to homogeneous plane waves
(3.70)
with
(3.71)
([JG
r2
Zb
2R b
lRb
b
=-kb--+arctan-
(3.72)
For convenience, the complex beam parameter (Kogelnik and Li 1966) is introduced
(3.73)
The wave can now be described in terms of magnitude and phase as
E =E ~exP[J·(OJt- q kb
_yb
_Ob
rmb
(,)
Zb
2
(
_b
Zb
)
(x 2+y2))]
b
b
(3.74)
All these relations for a Gaussian beam are valid for the first approximation
of the wave equation, see Appendix. In reality, the beam profile does not have an
exact Gaussian shape (Kogelnik and Li 1966, Davis 1979, Barton and Alexander
1989). However, the higher order terms in the field description can be neglected
for most applications. When the waist diameter of the beam is of the order of the
wavelength, then this approximation also becomes increasingly inaccurate.
3.1.4.3 Non-Gaussian Beams
The optical properties of a laser beam from a semiconductor laser are somewhat
more complicated and of considerable importance, especially when small focal
diameters are desired to obtain small measurement volumes in laser Doppler
and phase Doppler systems. The physical dimensions of the resonator in a semiconductor laser lead to an elliptical beam profile, where two different divergence
angles and beam waist positions (virtual origins) can be identified. The separation between the virtual origins along the Z axis is known as astigmatism (Lls in
Fig. 3.6) and can amount to as much as 40 /lm. Thus, thefocussing of the beam
can be more difficult. The elliptic beam profIle and (he astigmatism can be corrected using an appropriate collimation, as discussed in section 3.2.2 and 7.2.1.
3.1 Electromagnetic Waves
43
The electric field of a laser diode can be approximated by the product of a
Gaussian and a Lorentzian distribution (Naqwi and Durst 1990, Zeng 1992).
(3.75)
Here rmb (Zb,) is the radius for an e- 1 decrease of the field amplitude of the Gaussian profile in the x b direction and mb(Zb) is the half-width of the Lorentzian
distribution in the Yb direction.
R bx and R by are the radii of the wavefronts for the Gaussian distribution in the
x b direction and for the Lorentzian distribution in the Yb direction. 8 x and 8 y
are the FWHM angles (Full Width Half Maximum) in the two orthogonal directions. They are related to the half divergence angles a x and a y in the two directions (Fig. 3.6) through
r
tanax
= (ln 2)
-~
2
8
x
tan-·_
for the Gaussian profile
(3.76)
for the Lorentzian profile
(3.77)
2
8
Y
tanay = .je-l tan2
Typical values for 8 x and 8 y are 10 deg and 30 deg, corresponding to full divergence angles of 12 deg and 39 deg, which according to Eq. (3.69), lead to mean
waist diameters of 3.9 11m and 1.2/lffi (Ab = 650 nm ).
Fig. 3.6. The laser beam from a semiconductor laser
44
3 Fundamentals ofLight Propagation and Optics
3.1.5 Optical Mixing of Electromagnetic Waves
The electric current of a photodetector is directly proportional to the intensity
given by Eq. (3.30), whereby the sum of all field strengths impinging on the detector surface, independent of polarization, must be considered. This process is
called "optical mixing ofwaves".
In a laser Doppler or phase Doppler system, small particles (d p « ,1) interact
directly with the Poynting vector of the superposition of the two waves. For
larger particles this superposition takes place on the detector surface. Additional
scattering contributions may also be present, for example scattering from side
walls in the test section.
As an example, the mixing of two elliptically polarized spherical waves will be
examined, having the wavenumbers k l , k 2, the angular frequencies 0)1' 0)2 and
the phase shifts rp xl' rp x2' rp y1 and rp y2 in the two tangential polarization directions. The phase shifts may depend on the refractive index and the size of the
scattering particle being considered as a source for the two waves. If the detector
is aligned such that the normal to the detection surface (x-y plane) is directed
towards the scattering particle, then to a first approximation, only tangential
field components of the waves must be considered. The distances between the
source points of the spherical waves and the detector are 1j and r2 • The field
strength at the detector becomes
(3.78)
(3.79)
(3.80)
(3.81)
(3.82)
This expresses only the component of the field strength lying parallel to the
detector surface so that the Poynting vector and the energy flux direction points
into the detector surface. The intensity falling onto the detector using Eq. (3.30)
is described by
I=CE
2 -E .E
- ,=CE(E
2 _xl +E
_x2 )(E*
_xl +E*
_x2 )+(E
_y1 +E
_y2 )(E*
-yl +E*)
_y2
CE( 2
2
2
2
1=2 EXl+Ex2+EYl+EY2
(3.83 )
+ 2E xl Ex2 cos[ (0)2 - 0)1 )t- (k 2r2 - kl'i) + (rpX2 - rpXl)]
+ 2E yl EY2 COs[ (0)2 - 0)1 )t- (k 2r2- kl'i) + (rp y2 - rp Yl)
J)
3.1 Eleetromagnetie Waves
45
The signal received by the detector corresponds to the integration of Eq. (3.83)
over the surface of the detector.
The first sum in Eq. (3.83) corresponds to the DC part of the signal
2 +E 2 +E 2 +E 2 )
I vc =Ce
- (E
xl
x2
Yl
Y2
2
(3.84)
The next two sums involve modulated amplitudes, which will depend on the coherence of the light. These can be combined as l
(3.85)
with
(3.86)
1
ExlEx2 sin( lPx2 - lPXl)+ Eyl EY2 sin( lP y2 - lPYl)
lP = arctan[ ----------'---=-----';--'-----'---'cExl E x2 cos( lPx2 - lPXl)+ Eyl EY2 cos( lP y2 - lP Yl)
(3.87)
Equations (3.84) and (3.85) allow expression (3.83) for the intensity to be simplified
(3.88)
where the DC part and modulated AC part have been combined in the visibility
(3.89)
which is a common measure of signal quality in the laser Doppler and phase
Doppler techniques. If the amplitude and phase of each primary wave are equal,
the visibility is equal to 1 (r = 1). Furthermore, if the wavenumbers kl and k 2
are equal and the source points of the spherical waves are the same, Eq. (3.88)
can be written as
(3.90)
3.1.6 The Doppler Effect
The Doppler effect accompanies any movement of either the transmitter or receiver of electromagnetic radiation (Vogel and Gerthsen 1995). The principle of
the Doppler effect is illustrated in Fig. 3.7. An electromagnetic wave emanating
from a moving transmitter (generally a particle) with velo city v p and with
1
The sign of the eosine argument ean be positive or negative, beeause the eosine funetion is even. The ehoiee is made sueh that a particle moving in the positive x direetion
results in a positive frequeney differenee, aeeording to Fig. 2.5 and Eqs. (2.4) to (2.12)
46
3 Fundamentals ofLight Propagation and Optics
b
a
A,
Fig. 3.7a,b. The Doppler effect. a Moving transmitter and stationary receiver, b Stationary
transmitter and moving receiver
transmitting frequency jp will be compressed in the direction of movement and
expanded in the opposite direction (Fig. 3.7a). This results in a change of wavelength and frequency as given by
A = _c_-_v---,p~·_e-,-p_r
I - _c _ _
Ip
r
r - Ar -
-,--I-,-p_
vp·e pr
(3.91)
1--C
The perceived wavelength Ap and frequency jp of a moving receiver (generally a
moving particle) with a relative velo city v p with respect to the stationary transmitter (in general a laser) (fl' AI) is given by (Fig. 3. 7b)
A
P
= __A-'.I__
V P ·e lp
(3.92)
1--C
Ifboth the transmitter and the receiver are moving, the Doppler effect can be
invoked twice and the perceived frequency at a stationary receiver for a stationary laser and forlight scattered from a moving particle becomes (Iv pi« c)
1- elp'v p
Ir =II
e \
l--~
c
3.2 Optical Components
47
(3.93)
3.2 Optical Components
Fundamental to the realization of optical measurement systems is the generation and the detection oflight and the propagation oflight through optical components. In the following sections these fundamentals are discussed with respect
to components typically employed in laser Doppler and phase Doppler systems.
3.2.1 Matrix Transformation for Imaging
Generally the paraxial approximation can be made when analyzing laser Doppler or phase Doppler optical systems. Paraxial means that all rays subtend only
small angles with respect to the optical axis and thus, the sine and tangent of the
angle can be replaced by the angle itself. In this way the equations of paraxial
optics become linear and can be conveniently computed using matrices (Kleen
and Müller 1986, Hecht 1989). The influence of optical components on the light
path can be expressed in terms of a matrix, characteristic for that element, e.g.
for thin lenses. Through the multiplication of matrices, the accumulated effect of
many components can be evaluated.
Imaging by a lens can be considered as the sum of two elementary processes,
the refraction of light from one medium into another one and the propagation
of light in the lens medium. Examining first the propagation of light through a
medium of refractive index n and thickness d yields (Fig. 3.8a)
(3.94)
(3.95)
a
y
b
Ligh I beam
Medium I Medium 2
O~~~------------------,-~+
z
Fig. 3.8a,b. Propagation of light. a Through a medium of thickness d, b Refraction at a
plane surface
48
3 Fundamentals of Light Propagation and Optics
which can be expressed as
(3.96)
where At is know as the transfer matrix. This matrix takes the transmitted ray at
the entrance to the medium and transforms it into the incident ray at the exit
from the medium
Refraction on a plane surface is described by (Fig. 3.8b)
n2 sin a 2 = n1 sin a 1
(3.97)
(Snell's law)
or for paraxial rays
(3.98)
which for Y2 = Yl yields
(3.99)
Now the case of refraction at a spherical surface is examined, as illustrated in
Fig. 3.9. For paraxial rays Snell's law can be written as
(3.100)
where the second index designates the surface number in the optical configuration. In relation to the optical axis the angles become
ßl1
= a+a l1
and
ß21 = a+a 21
(3.101)
so that the ray position at the interface can be described by
sina=~
and
R1 '
Y21
=
(3.102)
Yll
Y
Surfacc 1
a
ßII
21
a
R,
Yl1
O~--~~--~L-----~r---------~--------~---'
l\ledi um J
",
A
Fig. 3.9. Refraction at a spherical in terface
Medium 2
B
z
3.2 Optical Components
49
and using Eqs. (3.100) and (3.101)
n 2-nI
n2a 21 =nla ll ----Yll
RI
(3.103)
Equation (3.103) can be written in matrix form
(3.104)
where D is the refractive strength of the interface
(3.105)
and Ar is known as the refraction matrix. It transforms the entrance ray into the
exit ray after refraction.
If B, the origin of the curvature, lies to the right of A, the radius is positive
(R >0) and for B left of A, R <0. For a plane interface (R» YI) Eq. (3.103) just
reduces to Eq. (3.98).
Using these fundamental matrix relations, more complicated elements such
as lenses or lens systems can be examined. Light propagation through a simple
lens with a refractive index of n/, an input surface curvature of RI , a thickness d
and an output surface curvature R2 in a medium with refractive index nm can
thus be described as
(3.106)
The system matrix for a thick lens is thus
(3.107)
For a thin lens with d ~ 0, Eq. (3.107) becomes
(3.108)
which contains the negative of the inverse focallength.
To discuss the imaging properties of a lens, several planes are of special interest (Fig.3.1O). The plane tangential to the lens surface on the optical axis is
50
3 Fundamentals ofLight Propagation and Optics
known as the vertex plane. The front focallength fl (f.f.1.) and the back focal
length f2 (bJ.1.) are measured from these planes. The front and back focal
points are the points where light, propagating parallel to the optical axis, is focused. If the parallel light rays entering the lens are extrapolated to the interseetion point of extrapolated focused rays, as shown in Fig. 3.11, a curved surface is
defined. For the paraxial approximation this becomes a plane and is known as
either the front (H1 ) or back (H 2 ) principal plane. Iflenses are analyzed using
principal planes, the incident and exiting rays can be extended to the principal
planes and between the planes the rays are parallel to the optical axis, as shown
in Fig. 3.11. For a thin lens, the two principal planes merge at the center of the
lens. Then there is only one common focallength. More complex optical systems
are often reduced to an equivalent thin lens, with known matrix and two translation operators.
o
I
z,
I
I
)
I
l~
",
~
ZII
Fronl loeal
plane
•
Fronl prindpal
plane
",
I
1\
J
",
",
Fronl ver lex
plane
I
F,
~
d
/,
Object
plane
v,
H,
Zn
11 m
/,
Back verlex
plane
Back principal
plane
Back focal
plane
Image
plane
Fig. 3.10. Important planes of a lens. 0: object plane, H",: front and back principal
planes, I\,,: front and back focal planes, V;,2: vertex planes, I: image plane
From
prinei al plane
I' ront
principal plane
ßack
principal plane
z
Fig. 3.11. Explanation ofthe principal planes of a thick lens (Hecht 1998)
3.2 Optical Components
51
The principal planes of the equivalent system are given by a translation h1,2
from the vertex planes, as shown in Fig. 3.10. Note that for H, to the left of V"
h, >0, and for H 2 to the right of V2, h2>0.' The equivalent optical system is
given as a matrix with unknown translation coefficients.
h 1
0)1 [ 1 -'
_[1-~
nmf ~_h'h2]
nm
n~f
n
1
h
m
o
-
1
--
f
(3.109)
1 _ _'_
nmf
Comparing this matrix with the matrix for a complex optical system
( A Bi=[I-
D)
c
n~f
h'n:
_~
h2
-
:t;]
1-~
f
(3.110)
nmf
the equivalent focallength for a thin lens
f=-~
(3.111)
C
and the principal planes can be determined
A-l
h2 =n - m
C
(3.112)
As an example, the thick lens from Eq. (3.107) can be transformed in this way.
The equivalent focallength is then given by
f =
R,R 2
(n/ - nm { R, - R2 -
d( 1- :~ )1
(3.113)
and the principal planes are located at
h'
= -f!i...
R nm
2
(1 - nn/ J
m
'
(3.114)
With known principal and focal planes, the system can be analyzed similar to
a thin lens. Using the system matrix, the ray paths (angles and distance to the
optical axis) after the lens are related to those before the lens, thus the image
plane can be determined from a known object plane.
Applying Eqs. (3.106) and (3.108) to the situation pictured in Fig. 3.12 leads to
the so-called thin-Iens equation (h1,2 = 0).
, Some literature uses a notation in which for H 2 to the right of V;, h1 > 0, and H, to the
left of V;, h, > 0 .
3 Fundamentals of Light Propagation and Optics
52
Thin lens
y
ParuUellight nay
Light nay through
the focal point
OL-~~~
____________- '______
~~~-L
_ _ _ _ _ _~~_ _~~~
z
]'
f
z
ZI
,
Fig. 3.12. Focal relations for a thin lens
1
1
1
Z2
ZI
-=--+-
f
(3.115)
Parallel light entering the lens (al = 0) will foeus at the foeal point f. Light
emanating from the foeal point of the lens (ZI = f) will be collimated, with a foeal point at Z2 = (a 2 = 0 ).
The transverse image magnifieation at the image plane (Z2) of a thin lens is
given by
00
ß = Image size _.2
Objeet size
(3.116)
ZI
whieh leads to
(3.117)
The numerieal aperture of a lens is defined by
NA=sinB =!!L
A
2f
(3.118)
where dl is the free aperture diameter of the lens. In photography the f-number
is often used, which is just the half inverse of the numerieal aperture
1
f/#= 2NA
The intensity of the image will inerease with the square of NA.
(3.119)
3.2 Optical Components
53
3.2.2 Propagation of Laser Beams Through Lenses and Apertures
In the far field a laser beam can be treated as a spherical wave. A thin lens will
transform an incident spherical wave with wavefront curvature Rw1 into a
spherical wave with wavefront curvature R w2 (Fig. 3.13) according to
(3.120)
or
1
1
(3.121)
according to Eqs. (3.106) and (3.108).
A similar relation can be written for the complex beam parameter Eq. (3.73)
(Kogelnik and Li 1966)
1
1
1
~2
~1
f
(3.122)
which allows the imaging of a laser beam through a lens to be calculated. For laser Doppler systems the imaging ofbeam waist rw1 at point ZI in front of the lens
to a beam waist rw2 at point Z2 behind the lens is of importance (see Fig. 3.14).
The distances ZI and Z2 are measured relative to the front and back principal
planes respectively. The arrangement in Fig.3.14 is then analyzed using
Eqs. (3.96) and (3.108) and assuming nm = 1 (air), yielding (Bernabeu 1989)
(A
B)=(1 Z2)(
C D
0
1
1
0)(1
1 0
-r
1
ZI)=[I-~
_..!..
1
f
ZI+ Z2-
Z
1-~
;2J
(3.123)
f
The complex beam parameter after the thin lens can be calculated by
q
_2
Aq
+B
=-=,,-1_
Cq +D
(3.124)
_1
At the beam waist (Rb
~
00 )
the real part of the beam parameter vanishes
(3.125)
Since the beam waist before the lens lies at the position ZI and after the lens at
the real part of the beam parameter is zero. Thus, two equations to determine the beam waist radius and length are obtained by examining separately the
real and imaginary parts ofEq. (3.124)
Z2'
54
3 Fundamentals of Light Propagation and Optics
y
Sphcrical wavcfronl
z
f
f
Fig. 3.13. Imaging of a spherical wave using a thin lens
l!
,
Fig. 3.14. Imaging of a laser beam and its waist by a lens
(3.126)
The position of the imaged laser beam waist is given by the real part
(3.127)
and the beam width by the imaginary part
rwJ
(3.128)
The quantities are visualized in Fig. 3.14 and the dependencies expressed by
Eqs. (3.127) and (3.128) are shown graphically in Fig. 3.15a and b. These figures
3.2 Optical Components
55
b
~
f
2
o
-4
-2
o
2
4
6
z.ff
-4
-2
o
2
4
6
z.ff
Fig. 3.15a,b. Imaging characteristics of a Gaussian beam for movement of the incident
waist about the front focal point (f = 40mm, d w• = 100~, A. b = 488nm). a Beam waist
radius, b Position ofbeam waist
illustrate the beam waist radius and its position for movement of the incident
waist about the focallength ofthe lens.
A laser beam waist at the front focal point will be imaged to the back focal
point with the diameter
(3.129)
This relation follows immediately from the imaging of a spherical wave. Dickson
(1970) derived this result by applying Kirchhoff's diffraction integral to a centered circular pupil with a Gaussian pupil function. Rempel and Fischer (1982)
showed that the result is a good approximation also for asymmetrie beams.
Otherwise, Fig. 3.15 indicates that even minute movement of the waist from
the front focal point will result in large movements ofthe waist on the focussing
side. In the example given in Fig. 3.15, a 15 mm shift from the front focal point
results in a 50 mm shift in the back focal plane.
For larger shifts away from the front focal plane, the output beam waist
moves over large distances with virtually constant diameter, i.e. the beam is collimated. This behavior is exploited in the collimators described in seetion 7.2.1.
Any apertures used in the system must be chosen large enough to avoid diffraction effects, either within the laser cavity or in the following optical system.
To estimate allowable aperture sizes, a circular aperture of diameter 2ra is examined and the Kirchoff diffraction integral is solved for a Gaussian beam, the
result being shown in Fig. 3.16. The maximum intensity transmitted through the
aperture I2' related to the intensity before the aperture II' is plotted against the
radius of the aperture ra relative to the local beam radius rmb at the position of
the aperture. According to this result, apertures should be a minimum of 4rmb in
diameter to avoid any influence of the aperture on the beam profIle (Dickson
56
3 Fundamentals ofLight Propagation and Optics
.....
N
~
1.0
.i?
'1;J
c::
.5"
"
.~
'"
Ol
0.5
~
0.0 ----~
o
2
Relative size of aperture ',/r,"b
Fig. 3.16. Influence of the aperture radius r. on the centerline intensity of a Gaussian
beam
1970, Hofman 1980). Therefore in laser Doppler and phase Doppler systems,
small apertures which truncate the beam should be avoided.
Laser beams from semiconductors have more complex imaging properties
since they exhibit different wavefront curvatures in directions orthogonal to one
another (Naqwi and Durst 1990). When sm all beam divergence or a localized
circular beam waist is sought, the elliptically shaped beam must be specially
treated with shaping collimators.
One preferred collimator system begins by adjusting one of the divergence
angles of the beam to infinity, usually in the plane exhibiting the largest divergence. Plane waves are obtained in this direction. The waist in this direction
then lies in the focal plane of the collimator. Following this a cylindricallens is
used to correct for the astigmatism in the other direction. In this way a Gaussian
beam profile can be approximated and further analysis can be based on the established relations given above.
3.2.3 Optical Gratings and Bragg Cells
Diffraction gratings and Bragg cells can be used effectively as beam splitters and
if the grating is moved (rotated), both devices also result in a frequency shift, a
necessary function for making laser Doppler systems sensitive to the direction of
the particle velo city. More recently, diffraction gratings have been integrated
into fiber optic interfaces (Czarske 1999) and holographie techniques now allow
very precise gratings with very specific characteristics to be manufactured. Nevertheless, the Bragg cell is more commonly used in laser Doppler systems, both
due to its high stability of frequency shift and because there are no moving
parts.
Kerr cells and Pockels cells have also been demonstrated as frequency shift
devices. However the Kerr cell exhibits a low limiting frequency while requiring
3.2 Optical Components
57
a high driving voltage (Bass 1955). Both the Kerr cell and the Pockels cell generate a phase variation with time, which cannot be maintained indefinitely without
a sweep-back. This leads to a discontinuity in the resulting Doppler signals.
Thus, neither ofthe devices have become common in laser Doppler systems.
3.2.3.1 Diffraction Grating
The diffraction grating offers a simple and inexpensive means for beam splitting. Either amplitude or phase splitting using a step or sinusoidal grating can be
used. The sinusoidal grating allows higher power to be directed into the diffracted orders. A frequency shift is achieved by rotating a radial grating at a constant frequency.
If the assumption can be made that the grating length L is much larger than
the grating width b, the standard expressions for diffraction through a slit can
be used to express the field strength a distance r from the grating (see Fig. 3.17)
(Hecht 1989, Klein et al. 1986).
Qp==Cfrg'Texp(-jkr)dA
A
(3.130)
r
Here the assumption is also made that both the source and the receiver are far
away from the grating in terms of wavelength I/, and that b > 21/,. The field
strength in front of the grating g' in Fig. 3.17 can therefore be assumed constant. T is the transmission function for the grating and A is the illuminated
area of the grating.
For amplitude splitting, the transmission function T can be expressed in
terms of the transmission factor Tg
x'
z
y
Fig. 3.17. Simple line diffraction grating
Diffracl ion
grating
(area A)
58
3 Fundamentals ofLight Propagation and Optics
I
for
b
nb ~ x ~(2n+ 1)-
for
b
'
(2n+l)-<x«n+l)b
T(x)=Tg {
o
2
n=0,±I,±2,...
(3.131)
2
Phase gratings can be even more effective than amplitude gratings. A phase
grating can be realized by simply varying the thickness d of a transparent medium with relative refractive index m. The transmission factor is then given by
exP(-j 27t (m -1)d) for
T(x)=Tg {
A
o
for
b
nb ~x~(2n+ 1)2
b
(3.132)
(2n+ 1)- < x < (n+ l)b
2
Further improvements are achieved if the amplitude or phase change is varied sinusoidally across the grating, for instance for an amplitude grating the
transmission function becomes
27tX)
T(x)=Tg ( l-COSb-
(3.133 )
For a phase grating realized through variation of the grating thickness, the
transmission function takes the form
(3.134)
The result of diffraction through a grating can be expressed in terms of the
intensity at a point P
. 2(2X
7tb (sm
. ß -sma
. ))
sm
(;~ (sinß-sina)J
x=br'
(3.135)
The positions of intensity maxima are given by the coherence condition
.ß
.
pA
sm
p -slna=±-,
b
p= 0,1,2, ...
(3.136)
The incident angle a simply shifts the position of the maxima.
If the grating is rotated, like in Fig. 3.18, the diffraction occurs on the moving
edges of the grating lines. Thus, the grating is a moving receiver for the incident
beam and a moving source for the radiated beam. The individual maxima exhibit a Doppler frequency shift, whose magnitude is dependent on the diffraction angle. For a = 0 deg this shift is
f sh --
vsinß
A
(3.137)
3.2 Optical Components
59
Inten ity I
r-----~
Laser beam with
frcqucm;y I.
I. + f ...",
ß
Fig. 3.18. Rotating diffraction grating
where V is the velo city of the grating. For a radial grating with N lines, a grating
constant of band a rotational speed of OJ disc the frequency shift becomes
v = P OJdisbJdisc
fSh(ß p ) = Pb
PJ.f"disc N = PJ.Egrid
(3.138)
The frequency shift is therefore a function ofboth rotational speed and ofthe
grating line density. Lines of 5 flm width and 10,000 to 20,000 on one disc are
achievable. At rotational speeds of 10,000 rpm, shift frequencies of 10 .. .20 MHz
in the first diffraction order are achievable. Using the two first diffraction orders
as beams for a laser Doppler velocimeter, the shift frequency doubles.
A refined analysis of the rotating grating treats the transmission function as a
wave packet or as a wave with wavelength b, which intercepts the incident wave
at an angle TC /2 - a and with frequency fg. As a wave packet, the transmission
function can be expressed using a Fourier series (Menzel et al. 1974).
Tg
Tg [
( OJ . t 2TCX)
1
[(
2TCX)]
T(x , t)=-+2cos
- --cos
3 OJ gTid. t 2
TC
grld
b
3
b
(3.139)
By solving the diffraction integral (Eq. (3.130)) for a Gaussian beam with its
waist at the grating leads to the following intensity distribution
p=2n+l
n=0,1,2, ...
(3.140)
60
3 Fundamentals ofLight Propagation and Optics
The diffraction integral can be interpreted as a Fourier transform in space,
thus the result is simply the convolution of the transformed illuminating field !i
with the transform of the transmission function T.
For an amplitude grating, all uneven diffraction orders appear, together with
the zeroth order. Furthermore, for a Gaussian input beam the intensity distribution in each order is also Gaussian. The zeroth order is unshifted in frequency.
The high er orders are frequency shifted according to Eq. (3.138). Their angular
positions are given by Eq. (3.136).
With proper layout of a sinusoidal phase grating, the zeroth-order beam can
be suppressed and a large percentage of the energy concentrated into the
±1 sI order. This requires an optimization of the local grating separation b with
the grating wavelength A = v I f grid. This optimization is very difficult for steplike phase gratings. A very elegant method of realizing a phase grating is afforded by Bragg ceHs.
3.2.3.2 Bragg Ce/ls
Whereas a sinusoidal phase grating can be achieved mechanically by varying the
thickness of the grating material, a Bragg ceH achieves this using acoustically
generated pressure waves in a crystal. The basic principles of a Bragg ceH can be
described with the help of the sketch in Fig. 3.19.
An optimal interaction between the acoustic and electromagnetic waves is
given when the vectors of the incident light wave koc' the detlected (refracted)
wave k!c and the acoustic wave kac satisfy the relation
(3.141)
The individual components are resolved as
(3.142)
(3.143)
Fig. 3.19. Bragg ceH
3.2 Optical Components
61
and with Aoc "" Alc "" Ac' Eq. (3.141) yields the diffraction condition
~-A(·
m/l,c
- ac smac _·P)
Sin c
(3.144)
where A ac is the acoustic wavelength.
The extent of the acoustic wave is significantly larger than that of the incident
light wave (L» Tm) and thus it can be treated effectivelyas a one-dimensional
grating. Therefore, only beam intensity variations in the x direction must be accounted for.
The transmission function takes the form
(3.145)
The amplitude of the density fluctuations or refractive index fluctuations in the
crystal Lln are determined by the choiee of material and the applied acoustic
power. The acoustic wavelength, A ac ' can be controlled through the acoustic excitation frequency. The solution of the diffraction integral requires integration
along the x and z axes; however, even for plane waves, no closed solution exists.
Nevertheless, a useful description of acoustic and electromagnetic wave interaction can be obtained using the wave equation, as presented by Chang (1976)
and Quate et al. (1965) (Bass Vol. II, part 2, 1995). This begins with the twodimensional wave equation
o2~Ax,z,t) + o 21L(x,z,t)
ox 2
OZ2
f1
o 2(c(X,t)Qc(x,z,t))
ot2
(3.146)
where the subscript c denotes the medium of propagation. The acoustic pressure
wave is described by
(3.147)
whieh leads to spatial and temporal variations of the dielectrie constant B. For
an isotropie medium the polarization does not change. The change in B can be
expressed in terms of the relative dielectric constant B r and the optical elastic
coefficient p
e(x,t) = B[ I-BrpSa(X,t)]
(3.148)
A solution of the wave equation for plane waves is assumed as the sum of a
zeroth-order and first-order wave
(3.149)
with
Qoc(x, z,t) = Qo (z)exp[j(f1J oJ- kocx sin a c- kocz cos Pm)]
(3.150)
Qlc(X,z,t) = Ql (z) exp[j(f1JIJ + klcxsin a c-klczcosPm)]
(3.151)
62
3 Fundamentals ofLight Propagation and Optics
In general amismatch between the acoustic wave and the light wave must be
allowed for, such that
(3.152)
This arises due to an improper choice of incident angle a or amismatch of the
acoustic wavelength. This mismatch has been given by Chang (1976) to be equal
to
(3.153)
The optimal angle of incidence is found under the condition Llk aem
.
mAo
sIna e = - -
2nA ae
= 0 to be
(3.154)
and the Bragg angle at which a maximum intensity can be found in the first order is then
(3.155)
Using Eqs. (3.147)-(3.151) the relation between the field strength and the
acoustic wave can be expressed as
dgoc • 1 k
4
*E
- - = J - on On1 p Sa le
dz
4
(3.156)
(3.157)
Higher orders can be neglected, assuming only a weak coupling between the
acoustic and optical fields (Lle« e). Using the boundary conditions gOe (0) = go
and gle (0) = 0, the field strength and the intensity can be obtained. The ratio of
first -order intensity at the exit [le (L) to the zeroth -order incident intensity
[Oe(O) is a figure of merit for Bragg cells and is given by
[ (L)
le
[oc(O) '" 17
. Llk ae L]2
[
SIn--
2
&;eL
(3.158)
where 17 is the efficiency factor of the Bragg cello Assuming equal refractive indexes for each order, the efficiency factor can be expressed as
17 -
3 SL J2 -~MP
2
(~)
( nnP
2A a
- 2A20
2 a H
o
(3.159)
3.2 Optical Components
63
The acoustic power Pa is related to the wave amplitude through
1
3 2
(3.160)
Pa =-pv SaLH
2
AU material properties in Eq. (3.159) are found in the factor
n6 p 2
M 2 =--3
(3.161)
pv
Land H are the dimensions of the excitation transducer, p is the mass density of
the medium and v is the acoustic velocity therein. For matched conditions
(Eq. (3.155» the intensity ratio ofEq. (3.158) reduces to
[lc (L)
(3.162)
--""17
[oc(O)
Thus, all quantities influencing the acousto-optical interaction are known.
Table 3.3 summarizes the relevant material properties and characteristic quantities for various Bragg ceU media, including allowable wavelength ranges and
light powers. Some distortion of the incident beam will occur; however, this
distortion can be minimized using a suitably small beam diameter with respect
toH.
TypicaUy, the center frequency for operation lies between 40 MHz and
500 MHz. The efficiency 17 decreases with increasing acoustic wavelength A ac '
which in part can be compensated by using a high er acoustic power. However
this leads to increased power in higher order beams and is therefore not practical over large ranges of driving frequencies.
Amismatch of the transducer to the acoustic field away from the center frequency also leads to a decrease in coupled acoustic power, hence also to a decrease in efficiency. Such a dependence is pictured in Fig. 3.20, which also indicates that efficiencies of up to 90 % can be reached under optimal conditions.
The phase mismatch of the Bragg ceU can be expressed in terms of the acoustic wavelength A ac as
Table 3.3. Materials and their properties used in Bragg cells (NEOS 1997)
Polarization
Laser power n
density
lkW cm 2 ] [ -]
Material
Optical
range
[nm]
Flint Glass SF6
AMTIR
Fused Quartz
Tellurium Oxide
Germanium
Gallium Phosphide
Lithium Niobate
450-2000
Random 0.12
1060-5000 Random 5.0
185-4500
Rand./Lin. >50
400-5000
Rand./Circ. 35
2000-15,000 Linear
0.5
630-10,000 Rand./Lin. 0.5
600-4500
Linear
0.05
1.8
2.6
1.46
2.25
4.0
3.3
2.2
Acous- Acoustic M 2 XlO- l5
tic
velo city
mode [kms l ] [m2 W- l ]
L
L
L/S
L/S
L
L/S
L/S
3.15
2.6
5.96/3.76
4.26/0.62
5.5
6.3/4.13
6.6/3.6
8
140
1.5/0.46
34/750
180
44/17
7/15
64
~
3 Fundamentals ofLight Propagation and Optics
100
-------
!:::-
...
.....
,
.8
u
eS
>..
u
t::
"
TJ
(.::i
'+-<
~
50
0.0
0.5
1.0
Acoustic power Pa [W]
Fig. 3.20. Diffraction efficiency of a Bragg ceil as a function of acoustic power (AcoustoOptic Modulator A-lOO, A-150 Hoya Optics 1988)
(3.163 )
using the characteristic length
(3.164)
and
(3.165)
A aeB is the acoustic frequency for the Bragg condition, Eq. (3.155). In this case
the phase mismatch becomes
L
LI<p=-m(m-1)1t
2Lo
(3.166)
The phase mismatch for the first mode solution of the intensity function,
Eq. (3.158), is Lltp=0.451t. The acoustic bandwidth of the first-order beam is
then
Llfac = 2 fae - facB
facB
facB
(3.167)
3.2 Optical Components
65
3.2.4 Optical Fibers
A very high percentage of commerciallaser Doppler and phase Doppler systems
today are delivered with fiber optie probes on both the transmitting and receiving side of the system. On the transmitting side, fiber optics link the laser and
transmitting optics to the front lens elements mounted in a probe. On the receiving side, the lenses and apertures in a probe are linked to the photomultipliers. The main advantage is the flexibility of probe placement and simplicity in
traversing. The bulkier components of the system: laser, Bragg eeH, photomultipliers, ete., can be mounted stationaryand remote from the measurement loeation. This also opens the way for miniaturization of probe heads for special applications. In some particularly novel systems, optical fibers have been used as
delay lines (Czarske and Müller 1995) or as pre-amplifiers (Többen et al. 1999).
Three types of optical fibers are available with standardized dimensions: step
index, graded index and single mode fibers. As their names suggest, they differ
in the refractive index profile and in the field distribution of transmitted light
through the fiber, as illustrated in Fig. 3.21.
The step index fiber has a core diameter in the range 40 .. .400 11m with a cladding index of refraction (n 2 ) about 1 % lower than the core (n j ). Light is transmitted through total intern al reflection, thus there will exist a limiting launeh
angle BA above which the light will not be transmitted and will exit to the cladding. This angle ean easily be deterrnined by applying SneH's law for the ease of
Y taking the limiting value, Y = YR:
(3.168)
and assuming the refractive index outside the fiber to be unity. For total intern al
reflection
COSYR
.
n2
nj
=Slna=-
(3.169)
and thus
NA = sinBA
=~n~ -n~ =nJiJJ
(3.170)
where Li is the relative index of refraetion difference.
(3.171)
The quantity sinB A is known as the numerieal aperture (NA) and expresses
the range oflaunch angles whieh will result in transmission. Some numerieal examples of the numerieal aperture for various fibers are given in Table 3.4.
The large NA for step index fibers facilitates the coupling of light into the fiber. On the other hand the maximum path-Iength inerease between an axial ray
and one entering at BA amounts to a factor 11 eosy and this contributes to dispersion. Thus, the step index fiber is not suitable for single mode transmission.
66
3 Fundamentals ofLight Propagation and Optics
a r
11
medium
11 m
b
11
"J "'("
--
\
~
- -- _._-- -
c r
IJ
a
-,
,,
,,
,
~1I2
,
_.J. _____
"
fit
1/ 2
11
- - - _.- - -- _._._.- - -
-~ _.-
- - - I'J - _.- - - - - - -
",
Fig. 3.21a-c. Types of optical fibers. a Step index fiber with ray path, b Graded index fiber
with ray path, c Single mode fiber with field distribution
Its main use in the present context is on the receiving side of the optical system,
where the ease of coupling light into the fiber can be exploited.
The graded index fiber exhibits a parabolic profile of refractive index over the
core, usually expressed as apower law
for
p~1
for
p>1
(3.172)
where p = r lais the non-dimensional radius and p = 2 for graded index fibers.
The limiting launch angle is now dependent on radius
(3.173)
3.2 Optical Components
67
Tab1e 3.4. Typical fiber specifications for A. = 850 nm
Fiber
Core di- Numerical Limiting
ameter Aperture
launch angle
NA [-]
a [flm]
BA [deg]
relative index of re- Attenuation
fraction difference
[dBkm 1]
LI [%]
Step index
Graded index
Single mode
40
25
5
1.45
0.91
0.23
0.25
0.2
0.1
14.5
11.5
5.7
4.5
3.0
3.0
and the numerical aperture is understood as being the extreme value taken over
the core radius. The graded index fiber is not normally employed in laser Doppler systems.
As the core radius of a fiber decreases, the number of possible propagation
modes of light also decreases. The single mode fiber has core radii of 3...6 !J,m
and, dependent on wavelength, allows only one mode to pro pagate. This condition is met when the normalized frequency
21ta
v=;:NA max
(3.174)
lies below certain limiting values. For a step index fiber this value is V c = 2.405,
for a graded index fiber (p = 2) V c = 3.6 (Kokuben and Iga 1980), and is known
as the mode cut-off condition. Manufacturing tolerances prohibit single mode,
graded index fibers in large quantities.
The transmitting optics of laser Doppler and phase Doppler systems use exclusively single mode, step index fibers, with the associated stringent requirements for low-Ioss in-coupling.
From Eq. (3.174) it is clear that single mode fibers should be wavelength
matched, hence, color separation in a two or three-velocity component measurement system is recommended before coupling into the fibers. However on
the transmitting side, also the polarization of the light must be preserved and
this is generally not the case in fibers, even if the light is linearly polarized at the
launch end. Small imperfections in the core shape or intern al stresses through
bending or twisting lead to intrinsic or extrinsic birefringence. These effects are
avoided by the use of polarization preserving, single mode fibers, which are
slightly ellipsoidal or pre-stressed in the cladding to create a very high linear birefringence. This leads to a preference for polarization in one direction. Typical
pre-stressing elements are illustrated in Fig. 3.22 for the PANDA fiber (polarization and absorption optimized, Fujikura) and the Bow-tie fiber (sometimes referred to the Hi-Bi fiber, York 1986). These are often elements with different coefficients of thermal expansion, which then induce a stress when the fiber is
cooled after the drawing process of manufacturing. Of course the polarization
preserving (PP) fiber must be properly aligned with the polarization direction of
the input beam.
All fibers exhibit a transmission loss due to absorption, scattering and leakage. These losses are expressed as an experimental power attenuation or damping over a length L
68
3 Fundamentals of Light Propagation and Optics
a
b
Fig. 3.22a,b. Fibers showing pre-stressing elements in cladding to preserve polarization.
a PAND A fiber, b Bow-tie fiber
(3.175)
where the coefficient ß is usually given in dB km-I and is wavelength dependent. Losses in optical fibers used in the telecommunications industry are very
low; however, these operate at wavelength windows far above visible light. The
theoreticalloss limits are dictated by Rayleigh scattering from molecular density
fluctuations, which are independent of material concentrations and defects.
Since Rayleigh scattering goes with A,-4, this loss increases strongly towards visible wavelengths. At 488 nm the absorption is about 33 dB km-I, while at
1.06!JlIl it is about 2 dB km-I.
The small core diameters of single mode fibers lead to high power densities,
which eventually can damage the fiber. Special fibers are available which use no
core doping but rather a cladding dopant to achieve index of refraction variations. Power levels of 5 W at 488 nm are achievable. The damage threshold for
pulses of short duration, for example as used with particle image velocimetry, is
1.4 kJ cm-2 at 532 nm for a pulse of duration 15 ns, in a fused silica fiber.
The largest losses when using fiber links are usually associated with the coupling losses when entering the fiber. These can easily be as large as 50%; however, careful layout and alignment of the coupling can reduce this value to
20% .. .30%. For a single mode fiber the fundamental propagation mode (LPoI :
linear polarization) can be approximated weH by a Gaussian beam profile and is
thus weH suited to the transmission oflaser light originating from a laser, lasing
in the TEM oo mode. Conditions for coupling a laser beam into a single mode fiber include achieving an appropriate spot size at the fiber end face, with a numerical aperture smaller than that given by the fiber and also that the beam axis
is properly aligned (translation and two tilt angles) with the fiber axis. The spot
size is generally matched to the core diameter and can be achieved using the
collimation guidelines relations given in section 7.2.l.
The beam waist (e-2 ), after focussing through a lens of focallength f, is given
by Eq. (3.129) as
(3.176)
3.2 Optical Components
69
and should be approximately 1.1 times the core diameter. The far-field divergen ce ofthe beam is given by Eq. (3.69)
A.
(3.177)
ab=_b1trwb
and should be less than BA' generally not a difficult condition to meet. The remaining alignment is however critical and can afford up to six different degrees
of freedom to achieve optimal results.
A very useful element for coupling a laser beam into a fiber is the graded index lens, marketed by Nippon Sheet Glass under the trade name SELFOC (selffocussing). The lens is essentially a graded index fiber of larger diameter and
shorter length. The index of refraction is given by
(3.178)
where A is the gradient constant. The ABCD matrix (see section 3.2.1 and
Fig. 3.23) is given by
(3.179)
For a parallel input beam (nB1 =Odeg) at z =0, Eq. (3.179) yields
(3.180)
Y2 = YI COS.,fAZ2
thus the beam propagates in a sinusoidal manner in the lens with period
p = 21t / -JA. For a Gaussian beam the propagation in terms of the parameter q
(section 3.1.4.2) can be described using
-
r
11 COS.,fAZ2 + (.,fAn o sin .,fAz
q =
_2 -q_I .fAno sin.fAz 2 + COS.,fAZ2
r
(3.181)
y
I/(r)
Fig. 3.23. Ray path in a SELFOC lens
70
3 Fundamentals of Light Propagation and Optics
Ifthe lens is exactly P /4 long (X - pitch), an input beam with its waist on the
front lens surface will be focused to a waist at the lens back surface, with a radius
(3.182)
As a numerical example, a X - pitch SELFOC lens with -JA = 0.0966 mrn -1,
Z = 16.26 mm and a wavelength of 632.8 nm is considered. An input
beam of diameter 1 mm exists with a spot diameter of 2.7 /-Lm, quite sufficient
for coupling into single mode fibers.
A further advantage of the SELFOC lens is its relative insensitivity to translation. This is seen directly from the lens matrix, in which for a X - pitch lens the
Y2 co ordinate no longer depends on Yl. A coupling efficiency of 70 ... 80% can
be achieved using SELFOC lenses. Due to aberrations, an improvement can also
be expected for lenses with a slightly shorter length (10 ... 20 /-Lm) than X- pitch
(Nicias 1981). Some examples of laser Doppler systems employing SELFOC
lenses for fibers coupling can be found in Jones et al. (1985), Hironaga et al.
(1985) or Stieglmeier and Tropea (1992).
no = 1.547,
3.2.5 Photodetectors
Detection of scattered light is achieved using various photodetectors, including
photomultipliers (PM), PIN diodes or avalanche photodiodes (APD). The choice
depends on the wavelength, the desired response time and the intensity. The
detector determines to a large extent the overall sensitivity of the system. An
overview of photomultiplier and avalanche photodiode characteristics, together
with further references can be found in Dopheide (1995) and Bude (1980).
The photodetector influences the system in different ways:
• The absolute spectral sensitivityl Sc ().,) (generated current / incident power)
or the quantum efficiency l}q().,) (generated electrons / incident photons) determines how effective the light is transformed into a current.
• The sensitivity of a photodetector is limited by the measurable current arising
when the detector is covered - the dark current i dc •
• Due to the response time of the detector, most fluctuations in the light intensity above a frequency, je, of about > 10 8 Hz will be averaged, thus a modulated light beam will result in a DC signal at the detector. Any fluctuations of
intensity below the limiting frequency, fg, will be followed virtually exactly.
• Photodetectors are often combined with amplifiers. In the case of photomultipliers the amplifier is realized directly in the dynode chain, in APDs, amplifiers are often integrated onto the same chip. In this way a strong amplification can be achieved before noise enters the electronic system, hence
achieving low noise amplification.
1
In the literature sometimes the spectral sensitivity is also called spectral response or
radiant sensitivity.
3.2 Optical Components
71
The power deteeted is ealeulated by integrating the Poynting veetor
(Eq. (3.7» over the surfaee of the deteetor, whereby an averaging oeeurs for all
eontributions above the limiting frequency Je (Eq. (3.29». This averaging oeeurs
due to the inertia of the electron emissions.
Pr
=~
fJ JC~(t) x!!<t») dt·dA
r ;
A, T
=
c; fJ ~II .~I;
dAr
(3.183)
JJ
= I dAr
A,
A,
In this equation the parallel symbol refers to veetor eomponents of the seattered
field perpendieular to the normal surfaee veetor Ar.
Only the component perpendieular to the deteeting surfaee contributes to
electron emissions. Radial components of the eleetrie field veetor result in a
Poynting veetor component parallel to the deteetor and represent losses. The
produet with a eomplex eonjugate is equivalent to optieal mixing (heterodyning
see seetion 3.1.5).
This power eorresponds to aquanturn eurrent equal to
dN q =_r
P
i = __
q
dt
hf
(3.184)
where f is the frequeney of the light and h is Planek's eonstant. This quantum
eurrent generates an eleetron eurrent. The ratio of generated eleetrons to incident photons is ealled quantum efficieney 17 q (/L,} and depends on the wavelength
A of the ineident light. The quantum effieieney is related to the speetral sensitivity through the relation
(3.185)
where q is the elemental eharge and c the speed of light. Figure 3.24 illustrates
the sensitivity for the three most eommon photoeathodes. Curves for quantum
efficieneies 17 q have been included.
Figure 3.24 also illustrates typieal speetral sensitivity and quantum efficieney
for semiconduetor deteetors. Semieonduetor deteetors exhibit mueh higher
quantum efficieney than photoeathodes.
For a quantum efficieney of 17 q , the quantum eurrent i q is transformed into
an eleetrie eurrent equal to
dN q - q17 q ceJJE ·E* dA
e-q17 q dt - hf" 2 -11 -11 r
i -
J
(3.186)
A,
whieh shows that the eleetrie eurrent density S (see Eq. (3.3» generated from the
deteetor area is direetly proportional to the incident intensity
(3.187)
72
3 Fundamentals ofLight Propagation and Optics
"i \.,
,,
,
300
400
500
600
700
800
900
1000
Wavelength 2 [nm]
Photocathode S-20 (Na-K-Sb-Cs)
Photocathode S-ll (Sb-Cs)
Photoeathode S-l (Ag-O-Sc)
---0--
Semineonductor Si- Diode
Fig. 3.24. Spectral sensitivity 5,(,1) and quantum effideney 17iA) for photoeathodes and
semieonductor detectors
and the output electric current is just the integral of this intensity over the detector surface
i
e
=ffSdA
Ar
= qTJ q
r
hf
ffldA
= qTJ q p
r
hf
(3.188)
r
Ar
In PMs and APDs the generated signal is amplified by the gain factor G. For
PMs it is the ratio of the anode current to the generated photoelectric current
from the photocathode. A PM with n stages (dynodes) and a secondary emission
Because the secondary
ratio of per stage has a current amplification of G =
emission rate can be directly changed with the supply voltage, also the gain factor is very sensitive to any change of voltage. The output current of the detector
is given by
an .
a
ir
=G qTJq
hf ffldA
r
(3.189)
A.
In most cases an intern al electronic amplification M is integrated into the
detector. Furthermore, the dark current from the cathode i dc , generated in the
case of no illumination, is amplified by G and results in a detector signal of idca
from the anode (index a) and this limits the sensitivity of the detector. The
source of dark current is the thermal emission of electrons. Cooling the detector,
which for some practical measurement tasks is necessary, can reduce the dark
current.
3.2 Optical Components
73
Since all detectors involve a time averaging above a limiting frequency, the
output current of a detector in a laser Doppler or phase Doppler system will
contain both a DC and AC (modulated) part.
(3.190)
where m is termed the visibility or modulation depth. The visibility expresses
the ratio of the AC to the DC part and is given by
m = i AC
iDC
= imax -imin
with
imax + im;n
imax
= max(i r)
(3.191)
im;n = min(i r)
Noise limits the accuracy with which any parameter can be determined from
the signal. One method for quantifying the noise level is the signal-to-noise ratio
(SNR), which expresses the ratio of the power in the signal Ps to the power in any
added noise PN , given in decibels
SNR/ =1010g
/'dB
10
~=20Ig
iefis
P
10.
N
(3.192)
lefi N
Equation (3.192) indicates that the signal and noise currents in the terminating resistor R of the receiving electronics can be replaced by their respective
powers. The amplitude of the AC part can be computed with the help of the visibility m and the amplification factor G, i AC = m Gi DC • The total noise in an amplification chain is determined to a large extent by the noise in the first element of
the chain, in this case the photodetector. For this reason two noise sources at the
detector will be examined in more detail, shot noise and thermal noise.
3.2.5.1 Shot Noise
Shot noise is unavoidable and integrally related to the electron emission process.
It is a white noise, whose magnitude is related to the available system bandwidth
and the signal amplitude
i'hot =~2q,dfi
(3.193)
Often shot noise is referenced to the bandwidth
(3.194)
or expressed from Eq. (3.188) as an optical noise power
(3.195)
The sensitivity of a photodetector is limited by the measurable current arising
when the detector is covered, the dark current idc • The dark current is also a
74
3 Fundamentals ofLight Propagation and Optics
white noise source related to the electron emissions and can be directly added to
the shot noise. The cathode dark current of a PM with gain factor G can be
changed into an equivalent noise input power. For a signal power of
(3.196)
the SNR is unity.
The internal amplification of the detector, either the dynode chain in a PM or
the amplifier of an APD, adds noise to the signal and is accounted for by a noise
increase factor F. This factor is simply the ratio of the signal power output including noise to the signal power output when a noise free amplification is assumed. For example a PM with n stages in the dynode chain, each with the same
multiplication factor of 0 and an internal amplification G, exhibits an output
current noise amplitude of
i'hot
= G 2qLi! {1+ ~ + ~2 +... + ~
J
(3.197)
Comparison with Eq. (3.193) for a noise-free amplified signal
i'hot =
G~2q Li! i
(3.198)
and squaring for the power ratio gives
1 1
1
FpM =1+8"+Y+···+
0
on = 0-1
(3.199)
For an APD with an intern al amplification in the p-n junction, the process is
more noisy, as shown by McIntyre (1966), and leads to a current noise amplitude
(3.200)
and a noise increase factor of
(3.201)
FAPD =G
3.2.5.2 Thermal Noise
Thermal noise (index t) arises from spontaneous fluctuations in electron current
in any resistance. It is a white noise and limited only by the system bandwidth
Li! . The working resistance R is a parallel circuit consisting of the terminating
resistor of the photodetector R d and the input resistance of the subsequent amplifier R;
1
1
1
R
Rd
R;
-=-+-
(3.202)
3.2 Optical Components
75
The equivalent voltage due to this noise is given as
J
(3.203)
u, = 4k TRL1f
where T is the temperature in degrees Kelvin and k is the Boltzmann constant.
The thermal noise voltage can be converted into a thermal noise current
(3.204)
3.2.5.3 Photodetector Model
An equivalent circuit of a photodetector and a first amplification stage is pictured in Fig. 3.25.
The quantum current iq (Eq. (3.184)) in the cathode gives rise to an electric
current ie with a shot noise current ie sho, given by Eq. (3.194). Thermal emissions
at the cathode lead to a dark current idc and an associated shot noise current
Idc shot' The internal amplification with a factor G, amplifies both signal and
noise. The noise sources of the intern al amplifier are taken into account through
the factor .JF. The anode current of the photodetector contains therefore
(3.205)
and the associated noise of these parts
(3.206)
The detector is terminated with a resistance R d connected in parallel to the
input resistance Ri of the first amplifier stage. Each resistance leads to a source
Genera I ion Genera Iion
of signa l
of noise
~~
'-----y-------''' ' - - y - - "
Elcclron emission
olthe calhodc
Internal amplitlcr
~~----y-----~"
Amplilicr
Fig. 3.25. Equivalent circuit of a photodetector and a first amplification stage
76
3 Fundamentals ofLight Propagation and Optics
of thermal noise, shown as a voltage source. The input current of the external
amplifier is given by
(3.207)
The detector has a capacitance Cd' which together with the resistances R d and
R; in parallel, represent a low-pass filter. Assuming that the signal does not vary
more than 1 % about the maximum value, the cut-off frequency can be approximated by (Durst and Heiber 1977)
f =
c
0.14 (_1
21tCd Rd
+~J
R;
"
0.14
~
(3.208)
21tC d R;
Use has been made ofthe fact that usually R d » R;. The time constant CdR; has
typical values of 10-9 s (R; = 100 n, Cd"" 10 pF) and thus, the cut-off frequency
lies around 20 MHz, although much higher values are also achievable. The signal
and the noise is amplified with M a and Ma-JF,: respectively and generates the
output signal U s and output noise uN •
3.2.5.4 Signa/-to-Noise Ratio (SNR)
The SNR of the photodetector can be derived using the definition given in
Eq. (3.192) and considering the alternating part of the signal and the noise component
(3.209)
Usually data is available on the internal amplification factor G, the anode
dark current i dcAn and the absolute spectral sensitivity Sc (.,1,). Using these parameters, together with the incident power Pr' Eq. (3.209) can be reformulated as
(3.210)
The system bandwidth Af may be limited by use of a low-pass filter with a
cut-offfrequency corresponding to the highest expected flow velocity. However,
if no such filter is employed, the cut-off frequency is determined by the capacitance and resistance ofthe photodetector, see Eq. (3.208).
Figure 3.26 shows typical curves of SNR for a PM and for a semiconductor
detector. Ideal conditions for M ~ 00 and m = 1 at a bandwidth of 1 MHz are
shown. Curves are also included for m = 0.5 .
The curves exhibit two distinct regions. At higher power levels shot noise
dominates and a JP: dependency is observed. At low power levels the dark current dominates and the SNR is proportional to Pr.
3.2 Optical Components
77
--Ideal
- - - Photomultiplier, m=l
--Photomultiplier, m=O.5
-- .... --Photodiode, m=l
---- -- Photodiode, m=O.5
-50
-100 L....l...J....l.WJll--1....L.JJJWL--'-J...L.IJLWL.-L..L.ll.LWL...J....l..1.WIlL-.L..l..JLl.UJIL....l...J....l.WIIl--L.J..llW1l.--L.JLJ..llWL..J...I.J.U1IIJ
10. 14
10~
10'
Signal Power P, [W]
Fig. 3.26. Dependence of SNR and signal power level (for ,1j = 1 MHz, R = 100 n,
T=300K)
The SNR of semiconductor detectors at high power levels deviates only marginally from its maximum attainable value. The disadvantage of semiconductor
detectors lies in the relatively high values of dark current, which lead to an earli er bend in the curves of Fig. 3.26. The dark current of semiconductor detectors
lies in the range I d "'1...10nA, whereas for photomultipliers the value is
I d ::::lnA.
Semiconductor detectors are therefore wen suited to medium and high scattering light intensity (Dopheide et al. 1990). Their compact form and low power
consumption are particularly advantageous. For low light levels the PM is preferable, in extreme cases with auxiliary cooling, e.g. photon detection.
Further analysis of the SNR must include subsequent amplification stages.
For N stages the noise power becomes
N-l
Pn
= 4kTLlf F,I1 Mn = 4kTLlf F,M,
(3.211)
n=l
where M s is the amplification factor and
F
,
=F, + F2 -1 + F3 -1 + ...... +~
1
M
M M
1
1
I1M
N-l
2
(3.212)
n
n=l
is the noise factor of the amplification chain. The first stage is the photodetector
and is clearly instrumental in determining the final noise power and therefore
deserves particular attention.
The rise time of photodetectors is approximately r '" 1...5 ns so that waves
above a frequency of f '" 10 8 Hz in Eq. (3.183) are averaged. Note that the dura-
78
3 Fundamentals of Light Propagation and Optics
tion of a photon is about r phot"" 2 x10 6 To , thus for A = 632.8 nm, r phot = 4 ns
(Orear 1987). However the photodetector is also a low-pass fllter due to its circuitry as represented in Fig. 3.25, with a cut-off frequency of
1
fc=
(3.213)
eR
a a
lying in the same order of magnitude. Thus, the low-pass filter characteristic
also leads to an integration effect (Eq. (3.208». Above this cut-off frequency any
signal modulation will be attenuated accordingly.
The lowest cut-off frequency in the signal processing chain will dominate the
low-pass filter effect and the amplitude attenuation will take the form
I AC
1
= r I DC ----r=====
1+(2n j
(3.214)
J
The SNR then becomes
(3.215)
2/2 M 2 Pq(IDC
2kT(R +R)ßi
+ I dc )+
a,
LI!f
RR.
a
,
This effect is particularly important for high signal frequencies, as shown in
Fig.3.27.
'i:Ci'
~
-==------..... _-::..:.-:-.~, - - ..... _..._ .....
~ 30 I - - -......
,,
20
10
o
,,
,,
,,
Cut-off frequency J;
1 MHz
10 MHz
100 MHz
... 1 GHz
10'
....
,,
,,
,,
,,
,
10'
.•.
,,
,,
,,
10'
,,
,,
,,
,
,,
...
,,
,
,,
,,
,,
,
10'
108
Signal frequency
Fig. 3.27. Influence of the cut-offfrequency on SNR
,,
f
[Hz]
80
4 Light Scattering irom Small Particles
lutions of the scattering problem are required which can also account for such
phase and amplitude distributions over the surface of the scattering particle.
To begin, a plane wave will be assumed and GO and LMT solutions for small
spherical particles will be discussed. Subsequently, these solutions will be modified to account for an inhomogeneous incident field. One method of achieving
this is to decompose the inhomogeneous incident wave into a spectrum of plane
waves and to apply the principle of superposition to a large number of plane
wave solutions. This leads to the Fourier Lorenz-Mie Theory (FLMT).
The principles of geometrical optics can also be extended to account for inhomogeneous fields and since a comprehensive description of this approach is
not yet available in the literature, a detailed discussion of this method will be
given. The method will be denoted Extended Geometrical Optics (EGO). It provides the basis for the derivation of the phase differences and time shifts of the
detector signals used in the phase Doppler and time-shift techniques presented
in section 5.3.
It is beyond the scope of this book to discuss all possible approaches to treat
the light scattering in homogeneous and inhomogeneous fields for different
types of particles. For instance Gouesbet et al. (1985, 1989) and Grehan et al.
(1986) have generalized the LMT to be applied to a particle arbitrarily placed in
a Gaussian beam (Generalized Lorenz-Mie Theory, GLMT). Extensions for cylindrical and layered particles are derived within the framework of more recent
GLMT developments (Gouesbet and Grehan 2000). Besides purely analytical
solutions, there exist a number of numerical methods, in general for smaller
particles but applicable for inhomogeneous incident waves and non-spherical
particles.
Using field theory, there are two basic approaches to the light scattering
problem: solving the wave equation with respect to the boundary conditions or
to relate the solution to known source problems. Examples for the former are
the Extended Boundary Condition Method (EBCM) (Barber and Yeh 1975,
Iskander et al. 1983) or the T-matrix method (Waterman 1965, Varadan and
Varadan 1980). The Coupled Dipole Method (CDM) also known as Discrete Dipole Approximation (DDA) or digitized Green's function method (Purcell and
Pennypacker 1973, Singham and Salzman 1986, Lakhtakia 1990, Hoekstra 1994)
is an example far the latter type of approach, using known dipole solutions and
replacing the particle with an appropriate combination of coupled dipoles.
An overview of some methods for the computation of light scattering from
small particles, limited to those methods often used for laser Doppler and phase
Doppler system calculations, is given in Table 4.1.
For further details about other methods to compute the scattering properties
of small particles the reader is referred to the extensive literature in this field
(e.g. Yeh et al. 1982, Barber and Hill1990, Harrington 1987, Hafner 1990, Hafner
and Bomholt 1993, Doicu et al. (2000». A review of elastic light scattering theories is presented by Wriedt et al. (1998).
4.1 Scattering of a Plane Wave
81
Tah1e 4.1. Approaches often used in laser Doppler and phase Doppler for the computation oflight scattered by small spherical particles in a plane wave and their extensions to
inhomogeneous waves
Computations oflight scattering from spherical particles
Geometrical optics approach dp »Ab
Wave solutions
Incident plane wave
Geometrical Optics (GO)
Parallel rays oflight incident on the particle
surface are considered which contribute to
the detector signal. The scattering of these
rays is computed under the assumptions
and using the rules of geometrical optics.
Lorenz-Mie Theory(LMT)
The incident plane wave is replaced by a
sum over spherical waves in space. The
wave equations are then solved for each
spherical wave and a superposition follows.
Incident inhomogeneous wave
Extended Geometrical Optics (EGO)
The inhomogeneous wave is approximated
over small surface segments of the particle
as locally homogeneous and plane. For each
surface segment the GO rules are valid and
can be applied to the collection of rays
which reach the detector.
Fourier-Lorenz-Mie Theory (FLMT)
The inhomogeneous wave is expanded into
a number of plane waves by a Fourier
transform. For every spectral coefficient
the LMT is applied. The superposition of
the partial waves on the detector surface
represents the inverse transform.
Generalized Lorenz-Mie Theory (GLMT)
The incident inhomogeneous wave is replaced by a sum over spherical waves in
space. The wave equations are then solved
for each spherical wave and a superposition follows.
4.1 Scattering of a Plane Wave
The light scattering according to geometrical optics (GO) and Lorenz-Mie Theory (LMT) is wen documented in the literature (Kerker 1969, Born and Wolf
1980, Born 1981, van de Hulst 1981, Bohren and Huffman 1983) and therefore
only results will be discussed below. An extension for arbitrary polarization will
be presented (Arst et al. 1990), as weH as the use of Debye series (Hovenac and
Lock 1992), which provides a correspondence of the wave solution to the scattering orders of GO.
These weH-known solutions oflight scattering of a plane wave from a spherical particle make several assumptions.
• The incident wave is homogeneous and plane, meaning that the incident wave
amplitude is constant in all space and that the phase is constant in every
plane perpendicular to the direction of propagation, see section 3.1.1.1. The
wavelength Aw and the wavenumber k w of the incident wave is connected
82
4 Light Scattering from Small Particles
with the vaeuum wavelength ,1.0 and wavenumber in vaeuum ko through the
refraetive index of the surrounding medium nm : ,1. w = ,1.0 I nm , k w = k onm •
• The particle is spherical, homogeneous and isotropie, exhibits no fields itself
(p p = 0), has a relative magnetic permeabilityI of Ji p = Ji o' a complex refraetive index of I1 p and a diameter of d p •
• The surrounding medium is infinite, homogeneous, isotropie, exhibits no
damping of electromagnetic waves (Km = 0), exhibits no field itself (Pm = 0),
has a relative magnetie permeability of Ji m = Ji o and areal refractive index of
nm ·
In reality nearly none of these assumptions are strictly fulfilled; however, the
complexity of the scattering process would otherwise not allow a closed form
solution for any configuration.
The nomenclature in the following discussion adheres to that given in
Fig. 4.1. The incident plane wave is defined in a wave eoordinate system (WeS)
and propagates in the Zw direetion with an arbitrary polarization in the
X w - Yw plane of ~w. The origin of the wes is loeated at the center of the particle.
The referenee system for the polarization direction is the scattering plane defined by the wave vector of the incident plane wave k w and the seattering veetor
aligned between the particle center and the detector r pr • The angle between these
two vectors is known as the scattering angle tJ,. The scattering plane lies at an
angle qJ, to the xw-z w plane.
The polarization in the e<ps direction, perpendicular to the seattering plane, is
associated with the §.l scattering function and the parallel polarization in the el1s
direction is associated with the §.2 seattering funetion. Different seattering orders will be specified by a superscript (N) •
As a first step, the eleetric field veetor of the incident wave must be projected
pherical
system
coordin~ t e
~~~-L
Y.
Inciden t lalle wave
Fig. 4.1. Definition of the wave co ordinate system (WeS) and the seattering coordinate system (SeS)
1
The condition for the magnetic permeability is easy to avoid (Kerker et al. 1983).
4.1 Scattering of a Plane Wave
83
onto the two polarization directions perpendicular (lPs) and parallel (zJ,) to the
scattering plane. To determine the scattered field strength, the scattering functions must be calculated and applied to this incident field.
(4.1)
The zJ s component and the fP s component of the scattered field ~s' as weH as
the scattering vector rpr ' are all orthogonal to one another. They define the scattering coordinate system (SCS). The X s axis of this system is aligned with the
scattering angle zJ" (ezJs>' the Ys axis is aligned with the angle lPs> (eq>,), and the
z s axis is along the scattering vector rpr ' (e pr)' The origin of the SCS is located at
the point where the properties of the scattered field are sought, generally where
the receiver optics are to be placed.
Two dimensionless parameters, caHed Mie-Parameters, are important for the
scattering
nd p
Aw
x =-M
(4.2)
n nd
YM=mxM=.:=l'...~
nm
(4.3)
/("w
where m is the relative refractive index of particle and medium: e.g. m > 1 for
particles and m < 1 for bubbles. The particle properties enter through the scattering functions §.! and §.2' This chapter is mostly related to the methods for determining these scattering functions and their properties.
For laser Doppler and phase Doppler simulations more than one incident
wave is used. For this reason it is helpful to define for every incident wave its
own co ordinate system (WCS) and relate these systems to a global reference,
main coordinate system (MCS). Furthermore, the position of the receiver(s), the
particle and the scattering co ordinate system can also be related to this main coordinate system. In Fig. 4.2 the four co ordinate systems and their relations are
illustrated.
The superposition of several scattered waves, for instance from different laser
beams and/or scattering orders, is performed in the receiver coordinate system
(R CS), also shown in Fig. 4.2. The x r - Y r plane lies parallel to the detector surface
and zr is aligned perpendicular to it. The origin of the RCS can be, for instance,
the center point of the receiver surface. The angles between the directions of the
scattered field components e zJs ' eq>s and e pr in the scattering co ordinate system
and the unit vectors of the RCS, e rx , ery and erz> are respectively ß(zJ,q>,r)(x,y,z)'
Normally for the superposition of scattered fields only the zJ s and fPs components are important, since the detector surface is aligned perpendicular to the
84
4 Light Sca ttering from Small Particles
Deleclor
surface
Plane wave
y
z
Fig. 4.2. Coordinate systems for the computation of light scattering by a particle in a
plane wave
scattering direction e pr and, in the far field, the component along the scattering
radius can be neglected. A transform from the SCS into the RCS is achieved using an appropriate directional matrix
!irxJ (cosßax COSß<f'XJ E =M E
ß-s
~r =( !iry = cosßtJy cosßrpy -.,
(4.4)
The directional cosines are given by the scalar product of the unit vectors eos
and e~s of the ses with the unit vectors e rx and e ry of the RCS, all components
expressed in the MCS.
For real detectors, the components of the scattered field will vary across the
detector surface. Also the orientation of the SCS over the detection surface must
be considered. To deal with this the detector surface is sub-divided into small
segments, such that the scattered field can be considered constant over each
segment. For each segment the components of the scattered field are computed
and then projected with Eq. (4.4) onto the RCS. Note that in special applications
with curved detector surfaces the RCS can be also vary for each detector segment.
On every segment n of the detector the received ligh t intensity is
(4.5)
and thus the DC and modulated part of the current in magnitude and phase can
be computed. The sum in Eq. (4.5) is performed over all incident waves N w on
the particular detector segment.
The total signal power Pr received by the detector is obtained by summing
over the power on each of the N detector surface segments. The power of each
4.1 Scattering of a Plane Wave
85
segment is the intensity, Eq. (3.83), times the segment size An' Eq. (3.183). For N
segments and N w incident electromagnetic waves this leads to
(4.6)
which can be expressed as a DC part (see section 3.1.5)
(4.7)
and a modulated part
The AC part can be expressed with an amplitude, related to the DC part with
the visibility m , and a phase of a eosine function.
PAC =
P
AC
eos( rp AC)
,
(4.9)
For a known geometrical configuration the task is now to determine the
scattering functions in Eq. (4.1). This is the most eomputationally expensive part
in light scattering calculations and will be presented in the following sections.
4.1.1 Description using Geometrical Optics (GO)
Light scattered from an air bubble in water was eomputed by Davis (1955) using
geometrical optics. Glantsching and Chen (1981) examined scattering from a
water droplet in air. The principles the GO approach have been summarized by
van de Hulst (1981). The validity of GO is only given for particles fulfilling
dp » /Lw. To eompare results of the GO method to solutions given by the LMT,
diffraction and surface waves must also be accounted for. Surface waves will not
be eonsidered in the following analysis, however Hovenac and Lock (1992) give a
detailed treatment. The effect of diffraction will be treated below.
4.7.7.7 Diffraction (oth order)
The diffraction of an electromagnetic wave by a spherical particle can be weIl
approximated using Fraunhofer diffraction from a circular disCo Solutions for
diffraction of a plane wave through a circular hole can be found in standard
textbooks (Born and Wolf 1980, Klein and Furtak 1986, Hecht 1989). Considering the geometry of Fig. 4.3, the field strength due to diffraction at a point Pis
given by
86
4 Light Scattering from Small Particles
A.
Plane wave
x •.
k •.
catleri ng pla ne
Fig. 4.3. Diffraction geometry
(4.10)
Equation (4.10) can be approximated in the far field (rpr »
1989) as
d~
I Aw , Hecht
(4.11)
with the Bessel function of the first kind and first order Jl (x). Equation (4.11) already takes the Babinet principle into account, i.e. the fact that diffraction from
a circular disc exhibits a phase shift of n; compared to diffraction through a circular hole (change of sign, van de Hulst 1981). The diffraction by the particle is
independent of polarization direction and can be summarized by the function
S(O) =S(O) =x 2 JJxMsintJ,) ex (_.~)
_ 2
M
'.Q
P J2
_1
xM
(4.12)
slnus
In the following treatment the diffraction will be denoted as the scattering of
order N=O. In the discussion ofthe Debye series (section 4.1.2), the combined
contribution of diffraction and reflection are considered in the Debye order
p=l.
4.7.7.2 Reflecfion and Refraction
Whenconsidering the scattering of an electromagnetic wave from a spherical
particle using geometrical optics, the intensity and the phase of the reflective
4.1 Scattering of a Plane Wave
87
and refractive components can be considered independently. These two properties of the scattered wave will therefore be discussed separately.
Intensity. For a homogeneous spherical particle the intensity of the different
scattering orders is influenced by two fundamental factors:
• Amplification or attenuation due to the geometry of the ray paths; i.e. focused
or divergent rays.
• Separation of the primary field into reflected and refracted rays (absorption
will be neglected) at every interface according to the Fresnel equations (see
section 3.1.3).
Influence oi the Geometry oi the Ray Paths on the Intensity. Following the derivation ofDavis (1955), the amplification or attenuation of the scattered field due
to the geometry of the scattering process is to be expressed in terms of gain factors G(N). Considering a differential circular surface element dA of the incident
plane wave centered around the Zw axis (see Fig. 4.4)
dA = nr;[ sin 2 (B; + dB;) - sin 2 B;]
=
(4.13)
nr; sin(2B; +dB; )sin(dBJ
The area ratio to the projected scattered field dA(N) can be analyzed for each
scattering order. The light power dPdA distributed over the area dA is given by
the incident intensity ofthe plane wave I w '
Considering a detector placed at an arbitrary point in space at a distance rpr
from the middle of the scattering particle, the sum of all possible detector positions will be simply a sphere centered around the particle. The illumination area
dP
dA
Fig. 4.4. Reflective and refractive components of a cylindrical light beam of vanishing
thickness impinging on a bubble (Davis 1955)
88
4 Light Scattering from Small Particles
on this sphere due to reflection (N = 1) can be given for the far-field condition
rpr » d~ I /Lw as
dA(1)
= 4n:r:r sin(2e; +de; )sin(de;)
(4.14)
The area ratio leads to an intensity being received on the detector surface due
to reflection of
2
dA
rp
(1)
Ir = I --(1-) = I w - -2
dA
4rpr
W
(4.15)
As a comparison, a point source at the center of the particle with an intensity I PO
at the particle radius, would generate an intensity I p at radius rpr of
(4.16)
The gain factor for reflection is simply the ratio of these intensities
1(1)
1
Ip
4
G(1) =_r_ _
(4.17)
For higher scattering orders (N > 1) the gain factor is a function of the angle
of deviation D(N) (at the N th surface) of the N th order. From the scattering geometry, the area dA (N) is given as
(4.18)
With reference to the power falling onto the circular ring area dA, the intensity
oflight over the area dA (N) is given by
I
(N)
r
dP
dA
=--=1 - - = 1
dA(N)
W dA(N)
W
r; sin(e;) co s(e;)d e;
· (D(N))dD(N)
rpr2Sin
(4.19)
Elementary geometrical considerations lead to a relation between the angle of
deviation D(N) and the incident angle e;
D(N)
=2(N -1)arcsin( si:e; )-(N -2)n:-2e;
(4.20)
The gain factor for N>1 is then given by a combination ofEqs. (4.16), (4.19) and
(4.20)
G(N)
= sine; cose; ------'-----'''-'---r=====1
sinD(N)
cose.
2(N -1)--' -2
m
(4.21)
4.1 Scattering of a Plane Wave
G(N)
= sinBicosBi
sinD(N)
(2
(N -l)cosBj
mcosB,
89
-2r)
For Bi = 0, Eq. (4.21) is not defined. A limiting value for Bi ---70 yields for this
special case:
limG(N)
=
8,-70
1
N 1
4( --;;---:1
(4.22)
)2
Although the scattering angle tJ s is restricted to the range O:S: tJ s :s: n, the angle of deviation D(N) has no such limitation. Since usually the scattering angle tJ s
is known and not the incident angle Bi' the incident angle must be determined
through Eq. (4.20), which is thus reduced to the problem of finding zeros of the
function
f(B;) =_D(N) +2(N -l)arcsin( Si:Bi )-(N -2)n-2B =0
j
(4.23)
within the range -n/2:S:Bi :S:n/2 for all possible D(N)=±tJs -2kn and with
k:S: (N -1) /2. Due to symmetry, tJ s must be considered in both the negative and
positive directions. Every solution for D(N) in Eq. (4.23) can be interpreted as a
possible ray path or partial ray through the particle. For instance in Fig. 4.5, the
following values of D(N) can be found for the 6th order: 10 deg, -10 deg, -350 deg,
-70deg and -710deg (Davis 1955, tJ s =lOdeg, m=0.75, air in water). Using
Eq. (4.20), the corresponding values of Bj , and, with Eq. (4.21), the gain factors
can be calculated. The scattered intensity of a given scattering order at a receiver
r" is the sum of all possible D(N) solutions superimposed, while also preserving
the phase.
Wafer " m
=1.333
D(6\
=-350 deg
D(') =-7l0deg
Air
", = I
-
,.
D(6)
=-370deg
Fig. 4.5. Possible partial rays of 6th scattering order and scattering angle of 10 deg for an
air bubble in water m = 0.75
90
4 Light Scattering [rom Small Particles
Separation of the Intensity at Interfaces. The separation of the primary field at
every interface and for every ray path into a reflected and a refracted ray is governed by the fact that the tangential components of the electromagnetic field
must be continuous across the interface. The resulting Fresnel equations give a
relation between the field strengths of the reflected and refracted light as a ratio
to the incident field strength. The field strength of the reflected and refracted
beam in ratio to the incident beam is dependent on the polarization direction,
either parallel (z3, component) or the perpendicular (fP, component) with respect to the scattering plane and is given in section 3.1.3 by Eqs. (3.51) to (3.54)
(Hecht 1989, Born 1981). For dielectric media (f.Lm = f.L p = f.Lo) the relative magnetic permeability cancels out and only the relative refractive index must be
used in the Fresnel equations.
ErtJ mcos(}; -cos(},
rtJ=--=
E;tJ
mcos(}; +cos(},
cos(}; -mcos(},
cos(}; +mcos(},
E,tJ
2cos(}.
ttJ=--=
"
E;,J
mcos(};+cos(},
E,lp
t ----
2cos(}.
,
lp - E;lp - cos(}; +mcos(},
(4.24)
(4.25)
with
. (sin(})
(), = arCSln
~
(4.26)
The intensity oithe reflected and refracted waves can be computed from the
reflectance RtJ.lp (Eq. (3.55» and transmittance TtJ,lp (Eq. (3.56»
T
tJ,lp
=~=mcos(};lt
I
;
() tJ,lp
COS,
12
(4,27)
When applying the Eqs. (4.24) - (4.27) to separate reflective and refractive
components at interfaces of a spherical particle, it is important to differentiate
between internal and external interfaces for the high er scattering orders N > 1.
For external interfaces the relative refractive index m pm = m = np / nm must be
used; however, for internal interfaces its inverse value mmp = m-I = nm / np and the
respective angles are required. Since the incident and reflected angles for a given
ray path are always the same within a spherical particle, the Fresnel reflection
coefficients rtJ and rlp only change sign for the two types of interfaces. The reflectance RtJ,lp does not change at all. The Fresnel coefficients for the exemplary
cases of air/water and water/air interfaces as functions ofthe incident angles are
illustrated in Fig. 4.6.
The increase or decrease of intensity due to the ray path through the particle
can be expressed in terms of an intensity coefficient for each scattering order.
i(N)(x,m,(})
tJ.lp
,
=(n:d
A,
p
w
)2 a(N)G(N)
= x M2a(N)G(N)
tJ.lp
tJ,lp
(4.28)
4.1 Scattering of a Plane Wave
91
b
a
I
I
I-- n, = 1.333
n, =1
n2 = 1.333
112
Ir.I=lr~1 ,/
,,
,,
,
,
0.5
..
'
.'
=1
,,
,,,
,,
-
.,
Ir.I=lr~1
-.-
,
....... "
Ir"I=I~I~
0.0
o
30
60
Incident angle
90 0
~
30
[deg]
..
-
,,
,
l/
I
60
Incident angle
90
~
[deg]
Fig. 4.6a,b. Dependence of the reflectance and transmittance on the incident angle for two
different polarization directions. a Water/air interface m = 1.334, b Air/water interface
m = 0.75
with
a(N) -
7J,rp -
R
{
7J,rp
RN-2(I-R
7J,rp
for N=1
2
7J,rp
)
for N> 1
(4.29)
In analogy to the Lorenz-Mie theory (section 4.1.2), scattering functions for
each scattering order and for each polarization component can be defined for
the light scattered according to geometrical optics
~;N)
=.p: exp(j </J~N))
and
~;N) = p,f exp(j </J~N))
( 4.30)
By considering also the phase of each scattering order, </J<:'~, it is possible to
properly superimpose all scattering contributions at each point on the surface of
the detector.
Phase. Three physical effects enter the computation of the phase for each scattering order!:
• Phase jumps due to reflection at interfaces: </J~N)
• Differences in the optical path length: </J~~)
• Phase jumps due to ray bundle focussing: </Jj~)
The conventional phase functions are described in detail in van de Hulst (1981).
!
The sign of the phase jumps depends on the form chosen for the propaga ting wave, i.e.
exp[j(mt-kr)] or exp[-j(mt-kr)]. Subsequent derivations will use exp[j(mt-kr)], as
introduced already in Eq. (3.22).
92
4 Light Scattering from Small Particles
Phase Jumps due to Reflection. At each interface a phase change of the field
strength can occur in the reflected order. This is indicated in Fig. 4.7 for an water/air and air/water interface.
Incident angles for phase jumps are the Brewster or polarization angle
Bj
= Bp = arctan(m)
(4.31)
and the angle of total reflection (critical angle)
Bj = Be = arcsin(m)
(4.32)
Phase jumps of 1t can be seen directly from the sign of the amplitude coefficient using the relation
for
N=1
for
N>1
(4.33 )
The case of total reflection must be considered separately. This case only occurs in homogeneous spherical particles for reflection (N = 1) and for a relative
refractive index m < 1, because for incident angles of Bj > arcsin(m) the reflection amplitude coefficient r/J,rp is complex. Rather than taking the discrete values
o and 1t, as suggested by Eq. (4.33), the phase change for total reflection is given
by
(4.34)
a
0.0
180 r-c---------~~------<lJ
arg(r.) = arg(r~)
~
~
E:'"
-
90 f-
arg(r_l = arg('!I)
arg(r.) = arg(r~)
o
,,
-
-90 fn1 =1,
-180 !-
o
n, = 1.333
n2 =1
,,
n2 =1.333
I
30
I
60
,,
,
...
,,
,900
Incident angle (); [deg]
30
60
90
Incident angle (); [deg]
Fig. 4.7a,b. Dependence of the phase of the reflected rayon the incident angle for the two
different polarization directions. a Water/air interface m = 1.334, b Air/water interface
m = 0.75
4.1 Scattering of a Plane Wave
93
and
rjJ~) =
2arctan [
~sin2B.-m2l
'
'P
cosB;
(4.35)
Path-Length Differences. Path-length differences through the particle are usually
derived with respect to a reference path connecting the source and detector
through the center of the particle, as pictured in Fig. 4.8.
Examining the ray path for reflection yields
",(I) =
'l'pl
2k w rp cos(}l)
,
(4.36)
and for refraction
",(2)
k
(,,2)
,(2))
'l'pl =2 wrp cosui -mcosu;
(4.37)
Each additional scattering order leads to a further phase change of
-2kwm rp cosBi N ). Thus, for the N 'h scattering order the phase change becomes
rjJ~~) = 2k w
a
Rct1cclcd
rA COSd;N) - (N -l)mcosB;N)]
(4.38)
b
r~y
Fig. 4.8a,b. Phase changes due to path-length differences through the particle. a Reflection, b Refraction
Phase Changes Through Ray Bundle Focussing. Considering each ray as a "pencil
of light" of finite width, this ray will be focused by the particle as illustrated in
Fig. 4.9 for an air bubble in water (m < 1) or for a water droplet in air (m > 1).
According to van de Hulst (1981), an astigmatic beam experiences a phase
change of 1t /2 when passing the focalline.
~if' ~n[(N -1)-~[l+~n( d~;) )l)
(4.39)
94
4 Light Sca ttering from Small Partic1es
0,
Fig. 4.9a,b. Focussing of a finite width "penci1 of light". a Spherica1 bubb1e, b Spherica1
particle
The sum of all influences on the phase of the scattered light leads to the following expression
A.(N)
'I'';,rp
==
A.(N)
'l'p ';,rp
+ A.(N) + A.(N)
'l'pl
'l'fl
(4.40)
These procedures for computation of the amplitude and phase of the sc attered field strength from individual rays of incident light must be applied to
each partial ray of each scattering order, i.e. for each solution D(N) according to
Eq. (4.23). The sum over all scattering orders with all ray paths yields the scattering functions
(4.41)
and the field strength observed at a given point on the detector surface within
the scope of geometrical optics is given, together with Eqs. (4.1) and (4.4) as
(4.42)
4.1 Scattering of a Plane Wave
E=
_r
95
exp(-jk r )
wprMMME
k
ß-S
rp_w
wrpr
The decisive advantage of geometrical optics is that the scattered light received by the detector can be considered in terms of scattering orders and each
contribution can be analyzed separately
E(N)
_r
=
exp(-jkwrpr)M M(N)M E
k
ß-S
rp_w
wrpr
(4.43 )
4.1.1.3 Rainbow and Airy Theory
A number of additional scattering phenomena must now be considered, which
cannot be explained using geometrical optics and the concept of scattering orders. These include the rainbow, the Airy theory and surface waves. The properties of the rainbow will be discussed further in section 4.1.3.3 and its exploitation
in a measuring instrument in section 9.3. Further details can be found in Hovenac and Lock (1992) and van Beeck (1997).
A rainbow exists when two rays of the same scattering order pass through the
particle on different paths but exit with the same scattering angle. Their interference with one another is called the rainbow. The scattering angle, or more precisely, the angle of deviation, exhibits an extreme value at the rainbow angle.
dD(N)
--=0
dB;
(4.44)
Any small variation of the incident angle results in a directional change in the
scattering angle variation. At this incident angle, given by
cos
2LJ{N)
u·
, RB
m 2 -1
=----::--
(N _1)2 -1
(4.45)
the gain function, Eq. (4.21), exhibits an infinite value, which prohibits a computation of scattered light intensity in the vicinity of the rainbow angle. The
rainbow angle is given by geometrical optics as
(4.46)
This situation can be resolved by introducing diffraction effects near the
rainbow. According to the Huygens-Fresnel principle, the propagation of a wave
can be described with the help of Eq. (4.10). Every unobstructed point on a
wavefront at time t serves as a source of spherical secondary wavelets. The amplitude of the optical field at any point beyond is the superposition of all of these
wavelets at time t+ L1t.
96
4 Light Scattering [rom Small Particles
The wavefront in the vicinity of the rainbow for the N = 3 scattering order
can be approximated according to geometrical optics using a cubic function
j(v). Inserting this function into the diffraction integral Eq. (4.10), and for
Qw = 1, the electric field strength in the rainbow region can be approximated as
with
and the integral can be transformed into the Airy function.
4.1.2 Description using Lorenz-Mie Theory and Debye Series
4.1.2.1 Lorenz-Mie Theory (LMT)
A closed solution for the scattering of a plane wave from a spherical, homogeneous, isotropie particle was first presented by Lorenz (1890) and by Mie (1908).
This solution is weIl documented in the literature (Born and Wolf 1980, Born
1981, Kerker 1969, Bohren and Huffman 1983), thus only final results will be
presented, although an extension using the Debye series will be considered in
more detail (Debye 1908, Hovenac and Lock 1992). This extension allows the
computed scattered field to be interpreted in terms of scattering orders.
The solution presented by Mie was obtained und er the assumptions and
geometrical considerations presented at the beginning of section 4.1.
For most applications, the approximation of the far field is sufficient and the
following discussion is therefore related to this case. For the interested reader,
the exact solution and the near and intern al field is given in Appendix.
All properties of the particle enter through the scattering functions ~1 and ~2'
which can be interpreted as a transform between the incident and scattered
fields. The approach used to determine the scattering functions is to solve the
wave equations in a spherical co ordinate system (Eq. (3.19) and section 3.1.1.2).
The incident plane wave is first decomposed into spherical partial waves, with
the origin of the co ordinate system placed at the center of the particle. Thus, the
surface of the particle also coincides with a constant value of the radial position
co ordinate f = f p ' Two further waves are introduced before solving the wave
equation, a scattered wave emanating outwards from the particle and an intern al
standing wave propagating inside the particle. The amplitudes of these waves,
designated the partial wave amplitude of the scattered wave and internal wave,
follow the constraint that the tangential field strength at the particle surface
must be continuous in the radial direction. It is essential to consider two independent solutions for each of the incident and scattered waves, one having no
radial electric component (transversal electric wave), the other one having no
magnetic radial component (transversal magnetic wave).
The total scattered field is obtained by summing over a sufficient number of
scattered spherical partial waves. In the far field some simplifications can be
made and the scattering functions can be written as
4.1 Scattering of a Plane Wave
97
=
~1 (z9,) = LQnJZ"n( z9,) + Qn 1"n (z9,)
(4.48)
n=l
=
~2 ( z9,) = LQn 1"n (z9,) + QnJZ"n (z9,)
(4.49)
n=l
where JZ"n(z9,) and 1"n(z9,) are related to the associated Legendre functions (Born
and Wolf 1980) and give the angular dependence of the scattered light in the direction of the scattering angle z9" The scattering functions in the far field are
dependent only on the scattering angle z9, (van de Hulst 1981 pg. 121). The
complex values Qn and Qn are the partial wave amplitudes. The partial wave amplitudes depend on the Mie parameters (Eqs. (4.2), (4.3» and are given by
_ 2n+l m~n(Y )~~(XM)- ~n(XM)~~(Y)
Qn I
I
n(n+l) m~n(Y
_M )qn(XM)-qn(XM)~n(Y
_M )
b
_n
= 2n+ 1
~n(Y) ~~ (x M)-1:11. ~n(XM)~~(Y )
n(n+l) ~n(Y
)q~(xM)-mqn(xM)~~(Y
)
_M
_M
(4.50)
(4.51)
Thefunctions ~n(xM)' IjIn~l.M) and qn(XM) are theRiccati-Besselfunctionsofthe
1st and yd kind, order n (Abramowitz and Stegun 1965), and the superscript I
denotes the derivative of the functions.
The necessary number of partial waves for convergence of the sums in Egs.
(4.48) and (4.49) depends on the Mie parameter xM" The maximum summation
index is given by
n max =x M +4.05x73'
+2
M
(4.52)
for the relative error of 10-7 • For relative errors smaller than 10-14 the summation limit is
n max =x M +8.1x73'
M +2
(4.53)
More complete details of the solution can be found in the literature (Born and
Wolf 1980, Born 1981, Kerker 1969, van de Hulst 1981, Bohren and Huffman
1983). For light polarized in the x direction, the solution Eq. (4.1) turns into the
solution given by van de Hulst (1981, pg. 124). It yields results comparable to
those obtained by the geometrical optics approach, Eq. (4.42), however without
the possibility to split the result into scattering orders.
4.1.2.2 Debye Series Decomposition
On the basis of the work of Debye (1908) Lock (1988) and Hovenac and Lock
(1992) demonstrated that the partial wave amplitudes Qn and Qn could be expanded into series, whose terms can be interpreted as individual scattering orders as described by geometrical optics. When a partial spherical wave is incident on a particle, a part will be reflected and a part will be refracted into the
98
4 Light Scattering from Small Particles
particle. In the same mann er, when the intern al wave propagates to the outer
particle radius, apart of the wave will be refracted out of the particle and apart
will be reflected and remain in the particle. By summing over all these interactions, the partial wave amplitudes from Eqs. (4.50) and (4.51) can be written in
the form
(4.54)
where pis the scattering order, R is the reflection coefficient and r the transmission coefficient for a spherical wave. The superscript (MM) denotes the reflection from the outer particle surface (medium - medium), (PP) is the inner refleetion (particle - particle), (MP) is the transmission from the outer medium
into the particle (medium - particle) and (PM) is the transmission from the
particle into the surrounding medium (particle - medium), (see Fig. 4.10)1.
It is important to note that the reflection and transmission coefficients are
different for a and b .
The reflecti~n an<r"transmission coefficients can be expressed in terms of the
Riccati-Bessel functions ofthe third kind, Sn and ';n, and their derivatives
R(MMl =
_"",b,
R(PPl
=
-a",b,
r(MPl
_""b"
=
g';n(Y )';~(XM)- !!';n(XM)';~(Y M)
-g';n (2:)S~(XM)+ !!Sn(x M),;~ (2:)
(4.55)
gSn(2:)S~(XM)- !!Sn(XM)(~(Y)
-g';n (2:)S~ (x M)+ !!Sn(x M),;~ (2:M)
(4.56)
-2jm
-g';n (2:M )S~ (x M)+ !!Sn (x M),;~ (2:)
(4.57)
(4.58)
a={!!!.1
-
for f!n
for Tzn
and
!!={~
(4.59)
The coefficients g and !l correspond to the two waves, transverse electric (TE)
and traverse magnetic (TM) respectively. Each term in the sum (4.54) can be interpreted as an individual scattering order and the contributions of a spherical
partial wave for a given scattering order p can be obtained by
for p=l
for p> 1
1
(4.60)
To avoid confusion between the scattering order p and the index p for particle the indexes for particle and medium are changed to the capitalletters P and M
4.1 Scattering of a Plane Wave
Rclractcd spherical wavc
T"lPl
99
Internal rellcctcd sphcrical wavc T(AfPI (R(PP))'
....
•••
@:g
rartial wave
Outside rclleclcd
sphcrical wave
Scatlercd wave
=
r(M"r(PA!)
R (M"')
2 d rclraclcd
sphcrical wave
I" re(rdctcd
spherical wavc
+
r (MPI R (PPl r (PMI
Fig. 4.10. Reflection and transmission coefficients used in the Debye series
Note that for p = 1 only a difference is calculated. It can be interpreted as the
sum of diffraction, eliminating the undisturbed incident field in the shadow of
the particle, and reflection contributions to the scattered field. In contrast to
geometrical optics with N = 0 for diffraction and N = 1 for reflection, the scattering order p = 1 yields the diffraction peak in near forward scatter and the reflection part at all angles.
Summing over all partial waves n for a given scattering order p, yields a scattering function equivalent to that of geometrical optics (Eq. (4.30».
~~P) (ß s) =
=
Lgn (p )Jl"n( ß,) +~n (p )1"n( ß s)
(4.61)
n=l
(4.62)
n=l
Summing over all scattering orders yields the total scattering function as
given by the LMT (Eqs. (4.48) and (4.49»
=
~l(ßS)= L~~P)(ßs)'
p~l
~2(ßs)= L~;P)(ßs)
(4.63)
p~l
A further difference between the Debye series solution and geometrical optics, disregarding the combination of diffraction and reflection, is that the Debye
series solution includes also surface waves (Hovenac and Lock 1992), since they
are already included in Eqs. (4.48) and (4.49). Thus, with the Debye series it is
possible to interpret the Lorenz-Mie theory in terms of scattering orders, as in
geometrical optics (Eq. (4.43».
100
4 Light Scattering from Small Particles
4.1.3 Scattering Characteristics tor a Plane Wave
The methods described in the previous sections can now be used to compute the
scattering characteristics of small particles in an incident plane wave. Specifically, Eq. (4.6) together with Eqs. (4.1) and (4.63) are used. The results lead to insight about the scattering dependencies on particle size, refractive index and
polarization, which are essential to properly understand the laser Doppler and
phase Doppler techniques.
Many of the discussions in this section pertain to the suitable choice of detector positions for phase Doppler systems. In general the aim is to choose a position in which a single scattering order dominates the total received intensity.
This has been briefly mentioned in section 2.2, but will be discussed in fuH detail
only in sections 5.3.2 and in section 8.1.
In the foHowing section most example calculations will be presented for the
case of a water droplet in air (m "" 1.333), since the resulting parameter dependencies are quite representative of a large number ofliquid droplets.
4.1.3.1 Intensityas a Fundion of Particle Diameter
Both the laser Doppler and the phase Doppler techniques exhibit a particle size
bandwidth, limited on the lower side by the minimum intensity detection level
and on the upper side by signal saturation in the photodetectors or in subsequent electronics.
A typical curve of scattered intensity as a function of the Mie parameter is
shown in Fig. 4.11 for a conductive material with a real part of the refractive index of a water droplet in air, m = 1.333 - j 0.1, and for a defined scattering angle.
For small particles, the intensity increases with the 6th power of particle diameter
and this scattering behavior is known as Rayleigh scattering. The steepness of
this curve leads to a rapid approach to the detectability limit for small particles.
For particles with a Mie parameter x M > 10, geometrical optics can be applied
and the scattered intensity increases with the second power of the particle diameter. Between the regions of Rayleigh scattering and geometrical optics
(1 ~ x M ~ 10) the scattered intensity exhibits strong oscillations. This region is
referred to as the Lorenz-Mie region. However, it should be emphasized that the
Lorenz-Mie theory is in fact valid throughout all size ranges.
In the case of less absorbing materials, the oscillations are stronger in the
range of geometrical optics, as shown in Fig. 4.12.
For medium conductivity the scattered intensity follows the non-conductive
curve for small particles. Light that enters the particle is only weakly attenuated
before exiting the particle. With increasing size however, the damping of internal waves increases and for large particles very little light exits the particle and
the scattering is dominated by reflection. The influence of the refractive index
on scattering properties will be discussed in more detail in section 4.1.3.5.
The scattering behavior shown in Figs. 4.11 and 4.12 is typical for all scattering angles when an appropriate scaling factor is used. Only one exception must
be mentioned. As seen in Fig. 4.11, at the scattering angles 1'), = 90 deg and for
4.1 Scattering of a Plane Wave
101
Partide diameter d p [11m]
0.01
0.1
10
100
--:~
10 '
'"
>-
'"c
"
C
10 '
.. ___ ~ ___ ,, __ I!!\..i'.
_._._ ..•..••...• .;.. .•..............•.....
'\ / .\' ..t' J/;'
.... ...... .:.................... ..
.. /. \ ....................... ~ .................. ..
.... /
:/
..[ ....
.. ..................................... _.................... ..
............ · r ;.. · ............ ·........ ·· ...... ·............···
-....... t .... .............................. ........... .
- ........:..................... .
~._
~
.
./ . .. ·i.. .... ..
.
.............. T··..................
........... / ........... :................................... ..
i
/ J
.- .................. --_ .. __ .. ..... .
"
10:
- x..
= 90 deg)
. '/' ... (tJ s
.............. ........... - _..... - .. --..- ...;. -.... -.... ..... ,~
... .
... ....
~
0.1
100
Mie parameter x" [-I
10
Fig. 4.11. Scattered intensity as a function of the Mie parameter XM (!!!. = 1.333 - j 0.316,
parallel polariza tion, solid line 13, = 30 deg, dashed line 13, = 90 deg)
Partide diameter dp [!-Im l
10'
10
0. 1
/11
::i
,;
= 1.333
/11 -
1.33.\
111
= 1..\3.\
111
1..\33
100
j 1000 (Rcnection)
j 0.1
j 0.01
10 •
10
I
10
100
Mie parameter x ..
[-I
Fig. 4.12. Scattering intensity as a function ofthe Mie parameter X M , computed for an insulator, m=1.333, and three conductive materials !!!.=1.333-jO.Ol, !!!.=L333-jO.l,
!!!. = 1.333 - j 1000 (13, = 30 deg, A = 514.5 nm, perpendicular polariza tion)
102
4 Light Scattering [rom Small Particles
parallel polarization, the scattered power of very small particles drops with the
10th power of particle diameter and becomes small extremely rapidly.
4.1.3.2 Intensity Distribution os 0 Function of Portic/e Size
The polar intensity distribution is shown in Fig. 4.13 for four values of the Mie
parameter in both linear and logarithmic scales. For small values of x M this distribution resembles a dipole (Fig. 4. 13a,b ). The polarization component perpendicular to the observation plane shows no dependence on scattering angle,
whereas the parallel component exhibits two symmetrie scattering lobes in the
forward and backscatter directions.
At the value of x M = 1 an asymmetry in the distribution is evident
(Fig.4.13c,d) and at values between 2 and 3 the first scattering lobes appear
(Fig. 4. 13e,f). Furthermore, the qualitative differences between the two polarization components at tJ s = 90 deg are no longer so distinct. A very strong scattering lobe is present in the forward direction, corresponding to the contribution
from diffraction, which is independent of polarization direction. Beginning at
Mie parameter values of 10, a larger number of scattering lobes appear, as is
typical in the geometrical optics region (Fig. 4. 13g,h).
The intensity distributions shown in Fig. 4.13 lend insight into the intensity
curve shown in Figs. 4.11 and 4.12. For small particles, which have no polar dependency of the intensity, only the amplitude changes with size. As the first
scattering lobes appear, they move across the detector surface with changing
particle size, thus leading to the observed oscillations in the Lorenz-Mie region.
As the particle becomes even larger, the scattering lobes become smaller in angular extent and due to the finite size of the detector surface, an averaging takes
place. This again leads to a smooth curve, as observed in the region of geometrical optics (Fig. 4.14).
This behavior has some direct consequences for the phase Doppler technique.
The optical system of the phase Doppler technique is chosen to insure a monotonie relation between particle size and the phase difference between the two
detectors of the receiving unit. Realizing that not only the intensity but also the
phase varies throughout the scattering lobes, it is evident that for particles in the
Lorenz-Mie region, the monotonie behavior may be difficult to maintain. Thus,
the size of the detector aperture must be chosen to integrate over at least one
scattering lobe. In fact this requirement often represents the lower measurable
limit of the phase Doppler technique, where the relation between phase difference and particle size begins to oscillate. For even smaller particles, the scattering lobes disappear (Fig. 4.13a-d) and the phase Doppler technique can again be
applied. For this case, planar phase Doppler optical configurations (section
8.2.2) are used because of the strong dependence of phase difference on particle
diameter.
Number of Scattering Lobes as a Function of Partide Diameter. The number of
scattering lobes between 0 deg:s; tJ s :s; 180 deg is shown as a function of the Mie
parameter in Fig. 4.15. In Fig. 4.16 the mean angular extent of the lobes and the
minimum and maximum angular distances between lobes are shown. The mean
4,1 Scattering of a Plane Wave
Li nea r scale
Logarithmic seale
X/of
= 0.\
b
--.- - .... ,
~/"
".
odeg
o
10' "
10
10' "
3x \0
Ix lO
\0·"
11
:'
"'.
::;\;;::
,"
.. '
.. '
......... .
Odeg
I'
,:\
12
6X \0' "
.
\ ://
'. '1i :
.. ' : I '. ' ..
. I .
:
J .
10 "
11
. - '" .
...... . ....
10' "
2X\0,1I
4X\0
103
I . \
....... ~:..._.,,""
'
' ... _';'~.;'
10
1,'1,.,1
1,'1" ,1
0
\0
10
-
octcg
10 •
5x \0 '
10'·
10 )
IX IO'
e
1,'1,.,1
0
X.,
....
=3
f
l,'i..,l
Odeg
2xlO '
10·'
10·'
4x 10 '
6x 10 '
10·'
8x I0"
10 I
Ix lO '
X.,
= 10
h
1,'1,.,1
o
Odcg 10·'
10 '
10 '
6
Fig. 4.13a-h. Scattering function at four different Mie parameter values computed for
water droplets in air (m = 1.334), solid: perpendicular polarization, dashed: parallel polarization
104
4 Light Scattering from Small Particles
Particle diameter dp [flID]
10
10
100
100
Mie parameter xM [-]
Fig. 4.14. Scattering intensity as a function of the Mie parameter XM. Computed for a water droplet in air (m = 1.333 , Aw = 514.5 nm ) at an scattering angle of 7J, = 30 deg and a
circular receiver aperture of radius R, = 10 mm
number of scattering lobes is linearly proportional to the Mie parameter, with a
proportionality factor of 11m. At scattering angles where the lobe amplitude is
large, i.e. where mixing of different scattering orders can be expected, the dis-
~o
:;:
J
Particle diameter dp [flm]
50
100
• Calclulated number oflobes per 180 deg
400
A",rn
rn
200
." ."
o
...-.-
.....'.'
........
...
....
..,
200
.......'."
......'
400
Mie parameter XM [_]600
Fig. 4.15. Counted number of intensity maxima representing the number of scattering
lobes between 0 deg and 180 deg as a function of the Mie parameter x M and particle diameter (,1=514.5 nm), caIculated with the Lorenz-Mie theory. The solid line corresponds to x M Im, the points correspond to the number oflobes counted (m = 1.334 ).
4.1 Scattering of a Plane Wave
1
Particle diameter dp [flml
10
105
100
b0100~------.---~r--.--~,-.-~-.-------.----.---.-~-.-.,-~
'"
~
x
Minimal distance
Maximal distance
Mean distance
•
o
•
•
...• •......
.".
.
..~ .._ . e•
•e
x
10
100
Mie Parameter xM [-]
Fig. 4.16. Angular distance representing the width of scattering lobes between 0 deg and
180 deg as a function of Mie parameter x M and particle diameter d p (A = 514.5 nm). The
solid line corresponds to 180 degxm I x M ' the points correspond to calculated minimal
(x), maximal (.) and mean (0) distances oflobes (m = 1.334)
tance between the lobes becomes an important design parameter for the receiving aperture. The receiving aperture should be large enough to average over severallobes and to smooth out strong amplitude fluctuations with size. The minimum distance between lobes is a quantity, which must be considered when the
detector is placed at scattering angles where the mixing of several different
scattering orders can be expected.
Origin of Scattering Lobes. The appearance of scattering lobes (maxima and
minima) in the polar intensity distribution (Fig. 4.13h) corresponds to interference of at least two waves emanating from glare points on the surface of the
particle. These waves could be waves of different scattering orders or waves of
the same scattering order but different partial rays.
This is clarified in Figs. 4.17 and 4.18, which show the dependence of the
scattered intensity of a lOOllm water droplet in air as a function of scattering angle for both polarization components. The Debye series decomposition, Fig. 4.17
and the geometrical optics 4.18 has been used to show also the contributions of
each individual scattering order. The modulation depth of the scattering lobes
increases sharply at scattering angles where two or more scattering orders are of
similar amplitude and begin to interfere with one another.
The angular frequency of the lobe structure (intensity oscillations) depends
on the distance between the glare points and therefore on the scattering angle
and on the scattering order. The glare points can be seen as point sources of
scattered spherical waves -larger glare point separations produce higher angular
frequencies.
106
4 Light Scattering from Small Particles
4.1.3.3 Scattering Orders, Scattering Modes
Diffraction (N=O,p=l). The field strength of diffraction in the far field, given by
Eq. (4.11), is pictured in Fig. 4.19 in a plane perpendicular to the direction of
propagation of the incident wave and for small scattering angles. As expected,
a
~ 10'
..'!
Alcxander's dark band
>.
-;;;
""
2"d rainbow \
I" rainbow
,-'-., ,-'-,r-""-..,
..<::
10 '
10 '
.u-L-L~~LW~-L~~~~-:~~~~~auu-~~~-L~~~~~~
- -SlIlll
- - 2 nd rcfraction
~Re tlcction
Parallel polarization (rclatcd
10
5'h refraction
- - - - 61h refraction
7'h rcfraction
4'h refTaction
--0--1 " refr.lclion
b
----v--
3'd refraction
-.- - -.-.
8"' refraclion
------- 9'h refraclion
scattcring plane)
Diffraction peak (p= I)
c:
'"
"<:
10 '
10 '
WU~-L~~~~-L-Lm-L-~~-L~~mw~-L~~~~~-L~~~~~U
o
45
90
Brewster angle
13~SCatlering angle 180
Rainbowangle
tJ, ldegl
Fig. 4.17a,b. Scattered light intensity as a function of scattering angle, decomposed für the
first ten scattering orders calculated with Lorenz-Mie theoryand Debye series decomposition für an incident plane wave (d p = 100!1.ill, A. = 488 nm, XM = 643.8, m = 1.333, pointlike receiver). a Perpendicular polarization, b Parallel polarization
4.1 Scattering of a Plane Wave
107
the diffraetive effeets deerease rapidly with seattering angle and they are rotationally symmetrie about the Zw axis. The diffraetion peak in the forward direetion is identieal for both polarization states of the incident plane wave. In Fig.
4.20 the dependenee of the field strength amplitude on seattering angle f}, and
particle diameter d p is shown. Clearly the region affeeted by diffraetion and the
a
--; 10'
~
PcrpcndicuJar polarizalion (rclalcd
.!!.
Diffraction peak (N=O)
10
scallcring plane)
Alcxander's dark band
2"" rainbow \
Refleclion (N== I)
Sum
I" rainbow
,.......J---..r..---'--,
10 '
10·' a.u.......u...-'--'--J.......JL.......L....u...-'--'--.......L.......L...J......L.I....L.-'O:::;"'L.......L-L....L....J......L.....L..J1I-l..J.L...L..i...L.....L...I---'.....L....J....I
- - 2nd refraction ---<>-- Sill refract ion
gO' refraction
- -$ u 111
----<>--Renect ion
3m refraction
b
--; 10'
- - - - 6'h refraction
7'h rerract ion
9'h refraction
,,-.-..-.-,,-.-..-.-,,-.-..-.-,,-.-..-,-~,,-.-.,-.-.,-.-.,-;
Parallel polarization
"'"
Diffraclion peak (N", O)
RcflcClion (N= I)
10'
10 '
10 '
L.I-L....L...JIIL~L......-~h='=:h::r::::::i::Litt::::::::::;±I$:=:j:=::::;::::::::~
°
ßrewster angle
Scallering angle 180
Rainbow a nglc
tJ, [deg]
Fig. 4.18a,b. Scattered light intensity as a function of scattering angle, decomposed for the
first ten scattering orders calculated with geometrical optics for an incident plane wave
(dp=lOOllm, A=488nm, x M =643.8, m=1.333, point-like receiver). aPerpendicular
polarization, b Parallel polarization
108
4 Light Sca ttering from Small Particles
EOIIT
400
40
40 -40
Fig_ 4.19. Diffraction by a spherical par tide with the diameter of d p
(Bob = 2x 10 5 Vm- I , rp' = 80 mm, A = 488 nm)
=
10 ~m
Particlc d iam eter d, [J.lm)
Fig. 4.20. Field strength amplitude for diffraction as a function of the partide diameter
and sca ttering angle (Ba = 2 X 10 5 V rn-I, rp, = 80 mm, A = 488 nm )
angular extent of the diffraetion lobes deerease rapidly with inereasing particle
diameter.
The degree to whieh diffraetion must be eonsidered in eomputing the seattered field depends largely on whieh seattering orders are being eonsidered and
their respeetive amplitudes. However, to eorreetly aeeount for diffraetion in the
deteetor signal at small seattering angles, the field strength of the incident laser
beam must be added to the sum with the eorreet phase (eompare with near field
in section 4.1.3.6 and referenee-beam method in seetion 5.2.2). This will depend
on the deteetor distanee from the beam axis and also on the beam radius.
4.1 Scattering of a Plane Wave
109
Retlection (N=l, p=l). Retlection can be found at all scattering angles. This is
easily confirmed by looking at a metal sphere and observing that the entire surroundings are imaged on the surface. For transparent spheres the Fresnel condition dictates that retlection will vanish at the Brewster angle for parallel polarized light, Fig. 4.21. At this angle all light is refracted into the sphere. Thus, at
the Brewster angle the high er scattering orders dominate over retlection and
water droplets, for instance, exhibit an intensity ratio of nearly 1000 between
first-order refraction and higher scattering orders (Fig. 4.17b). Such conditions
are particularly interesting for the phase Doppler technique, since when one
scattering order dominates, the lobe structure vanishes and the relation between
particle diameter and phase remains linear.
Since the diffraction and reflection are not separated in the Debye series expansion, the curve for the scattering order 1 represents only reflection at scattering angles above about 10 deg. The distinction between diffraction and reflection is clarified in Fig. 4.21. The sum of the diffraction and reflection, as
obtained by applying the Debye series expansion, is compared to the individual
contributions (and their sum) as computed using geometrical optics.
~ 10' t-ro-''-''~-''-~~-''-''~-r.-''~-''-''ro-.,-"~-.,-,,
..::!.
- - Diffra<::lion and rcllcclion (Debye)
....
.~
-- ---- DiffraClion and rcllcction (GO )
- - Pure rellection (GO)
'-------,>
'"c:
10'
\Ot=::::;::~=:;::::=t=::::;:=:z::::::;::~~±::~
o
10'
2
4
............... Pcrpend icular polarizalion (90 deg)
/'
Diffraclion and reOedion
(Debye serics)
• • Diffraclio n and relleclion (GO)
:.:~_::.: Pu re reOcction (GO)
Parallel po larizali n
(0 d g)
1O ' L.....J.--'-....L....J.....JL.....J.....L.....L...L-L-L--'-....L.....L...1L-L....L....L..L-L....I.....L.....L...L-L-L....J.......L....J........L...J.....L.-'-L-W
o
45
90
135
180
Scaltcring angle ". Ideg l
Fig. 4.21. Contribution of diffraction and reflection to scattering intensity as computed by
geometrical optics and LMT with a Debye series expansion (dp=lOO/lm, A=488nm,
x M = 643.8, m = 1.333)
First-Order Refraction (N=p=2). In the forward scatter region (10 deg < tJ s
< 50 deg ... 100 deg), first-order refraction usually dominates. Geometrical optics
predicts a limiting angle for first-order refraction, for example 82.79 deg for
water droplets in air (m = 1.333). This behavior can be seen in Fig. 4.22.
The Debye series expansion yields a less sharp decrease in intensity of firstorder refracted light with scattering angle. The discrepancy can be attributed to
110
4 Light Scattering from Small Particles
the existence of surface waves, which are not accounted for in geometrical optics. For more accurate results with geometrical optics, surface waves can be calculated and added to the solution (Hovenac and Lock 1992). The difference between the scattering orders of Debye series and geometrical optics yields also an
estimation of the surface wave strength. This demonstrates one advantage of
using Debye series computations together with results from geometrical optics,
especially in overlapping regions of different scattering orders. One further example is seen in Fig. 4.17b, where in the region 80deg<t9, <90deg the firstorder refraction is the strongest scattering order, in disagreement with the result
obtained using geometrical optics in Fig. 4.18b.
o
•
l't refraction p=2 (Debye series)
1,t refraction N=2 (GO)
Parallel polarization
(0 deg)
Perpendicular polarization
(90 deg)
10-9 L-I.---'--'--'--L-I.---'--'--'--L-I.---'--'--'--L-I...J....L..-'--'--.L......IL......L-'--'--'--L-I.l.....L...:.L--'--.L......IL......L-'---'---'
180
o
45
90
135
Scattering angle iJ, [deg]
Fig. 4.22. Contribution of refraction to scattering intensity as computed by geometrical
optics and LMT with a Debye series expansion (dp=lOOllm, A=488nm, x M =643.8,
m = 1.333)
Higher Order Refraction (N)2, p>2) and Rainbows. According to geometrical
optics, second-order refraction has two scattering modes above scattering angles
of about t9, = 137.2 deg for water in air (m = 1.333). This is illustrated in Fig. 4.23,
in which two modes exist with the same scattering angle. Interference between
these two modes leads to strong scattering lobes within a single scattering order
for perpendicular polarization. For parallel polarization the intensity of the second-order refraction is weaker. This is because for water in air, the Brewster
condition is met for first-order refraction. In comparison to the perpendicular
polarization, most of the light that is refracted inside the partiele leaves the partiele immediately. Only a small part is reflected inside the partiele and creates
higher scattering orders. This is also evident for the much higher intensity seen
for first-order refraction with parallel as opposed to perpendicular polarization
in Fig. 4.22. Because the Brewster condition can be met only for parallel polari-
4.1 Scattering of a Plane Wave
111
Fig. 4.23. Illustration of the two scattering modes for second and third-order refraction
and further rays (reflection, surface waves) influencing the intensity in the rainbow region
zation, this also leads to weaker mode oscillations for higher scattering orders
for this polarization state (Fig. 4.17).
This behavior of rainbow suppression for one polarization direction cannot
be generalized too widely, as illustrated later in Fig. 4.35 for other refractive indexes.
The term rainbow is used to designate angular regions in which more than
one solution exists for a single scattering order, in which case the individual solutions are known as modes or partial rays. One such example has been illustrated in Fig. 4.23. The second-order refraction in water droplets forms the wellknown rainbow observed in nature at around zJ, = 137 deg. A second rainbow
formed by third-order refraction is also seen in nature und er favorable conditions. The region between the two rainbows, where reflection dominates, is
known as Alexander's dark band since the intensity drops sharply (Figs. 4.17
and 4.18). Both of these rainbows can be seen in the picture shown in Fig. 4.24.
Higher order rainbows are generally not seen in nature due to their low intensity
level.
In Fig. 4.25 the intensity distribution over the scattering angle range of the
rainbow (132 deg ~ zJ s ~ 152 deg) is shown. The interference between the different partial rays of the second-order refraction generates the dashed curve,
known as the main rainbow maximum and supernumerary bows sometimes
seen also in natural rainbows. The rainbow angle is the limiting angle of secondorder refraction according to geometrical optics. At this angle both partial rays
are of similar intensity and the rainbow attains its highest amplitude. For larger
scattering angles one ray always dominates and the interference intensity decreases.
The interference pattern from second-order refraction is further modulated
by interference between second-order refraction and reflection. This is known as
ripple structure and is shown as asolid curve in Fig. 4.25.
From the above description it is evident that the particle size can be obtained
by measuring the scattering lobe separation. Especially in the rainbow region
112
4 Light Scattering from Small Particles
2n~
rainbow (N ,I)
l"rainbow(N 3)
A1exander's
dark band
Fig. 4.24. Natural rainbows observed under favorable weather conditions
:-.
.;;; 600
c:
u
c:
---Sum or all scatlcring orders
(LMT soluti on)
------- 2 nd refraction (p - 3) on ly
(Debye solution)
400
135
140
145
150
callcring angle
I', Idegl
Fig. 4.25. Detail of scattered intensity near the rainbow angle for (d p = 100 11m, m = 1.333,
A = 488 nm, x M = 643.77)
this possibility has been exploited in instruments and the Airy theory of rainbows (seetion 4.1.1.3) gives a very good approximation of the relation between
particle size and the supernumerary bow distribution (section 9.3).
In Fig. 4.26 the intensity distribution is shown as a function of the particle diameter for m = 1.32. In Fig. 4.26a alI scattering contributions from LMT are pictured and the supernumerary bows are disturbed by the ripple structure. In Fig.
4.26b only the contributions of second-order refraction have been used, thus
eliminating the ripple structure.
4.1 Scattering of a Plane Wave
b
a
[
113
500
",,""
.
"
400
<l
E
.~
""
'"
:Q
300
.
"
0..
200
100
134
136
138
140
112
144
134
136
110
138
142
144
Scallering angle /J, (deg)
Scallering angle /J, (deg )
Fig. 4.26. Intensity distribution in the rainbow region as a function of particle size
(A. = 632.8 nm, m = 1.32, perpendicular polarization). a Complete LMT solution,
b Second-order refraction only, from Debye series (p = 3 )
The position of the maximum intensity of the supernumerary bows is not a
strong function of particle diameter, however the ripple structure is more sensitive. In Fig. 4.27 the complete Debye series has been used to generate the scattered intensity over a particle size range of 400 nm. Already for size changes of
260 nm, the ripple structure is shifted in scattering angle by one period. Thus,
exact size measurements for particle diameter variations significantly smaller
-200.4
E
:0.
.."
<:;
E
"
'6
"
:Q 200.2
i:
"
0..
200.0
134
136
138
140
142
144
Scallering angle /J, (deg)
Fig. 4.27. Scattered intensity distribution over the rainbow region as a function of very
small particle size changes (m = 1.32, A. = 632.8 nm, perpendicular polarization)
114
4 Light Scattering from Small Particles
than the wavelength are possible in prineiple by observing the rainbow strueture
closely (Han et al. 1998).
Another problem for particle size and refraetive index determination from
the rainbow pattern is evident from Fig. 4.27. Due to the ripple strueture, it is
diffieult to determine the exaet loeation of the rainbow angle or the angles of
maximum intensity in the supernumerary bows. This is the limiting faetor of aeeuraey in rainbow refraetometry and will be diseussed further in seetion 9.3.
The angular positions of the seattering orders are funetions of refraetive index, henee also of the position of the rainbow. In Fig. 4.28 the intensity distribution is shown as a funetion of refraetive index for a particle of 200 /-lm
(,1 =632.8 nm). Together with information from Fig. 4.26, both the refraetive
index and the particle diameter ean be determined. The refraetive index is related to the absolute angle of the rainbow maxima and the particle diameter to
the period of the supernumerary bows. This teehnique is diseussed in more detail in seetion 9.3.
b
a
-::
1.35
"
.,
ü
.,...
<.!:
1.34
'-
0
><
"
.5
"C
1.33
\.32
134
136
138
114
140
142
Scatlcring angle iI, Ideg]
134
136
138
140
142
144
c3ltering angle tJ, ldeg]
Fig. 4.28. Intensity distribution in the rainbow region as a function of refractive index
(A = 632.8 nm, d p = 200 ~m). a Complete LMT solution, b Second-order refraction only
from Debye series (p = 3 )
4.1.3.4 Scattering Order Dependence on Partic/e Diameter
In Figs. 4.29-4.32 the intensity distributions of the first 10 seattering orders are
given for three particle sizes, 10 11m, lO0/-lm and 1000/-lffi (m = 1.333 water in
air, ,1 = 488 nm) and for both polarization eomponents, ealeulated with geometrieal opties and Lorenz-Mie theory. Aeeording to geometrieal opties, the ray
paths through a spherieal particle will be independent of size and the intensity
distribution of the individual partial rays as a funetion of seattering angle should
4.1 Scattering of a Plane Wave
115
not change with size. This behavior is seen in Figs. 4.29 and 4.31 for reflection
and first-order refraction (N <3), both of which exhibit only one partial ray.
The curves for these two scattering orders are only scaled in intensity for different particle sizes. The influence of particle size becomes evident only after a superposition of all partial rays (preserving the phase, Eq. (4.41) and the multiplication of their individual intensities by the particle diameter squared, Eqs. (4.28)
and (4.30). For this reason, the intensity of scattering orders with two or more
possible partial rays (N > 2) changes qualitatively with particle size. Nevertheless, the sharp decrease of the scattering orders in the region of the limiting angles is always present.
Figures 4.30 and 4.32 show the same scattering orders as in Figs. 4.29 and 4.31,
calculated using the Lorenz-Mie theory and Debye series decomposition. As
shown in Figs. 4.30, and 4.32, the limiting angles for refraction and high er scattering orders are clearly not independent of particle size, again confirming the
lower size limitations of geometrical optics.
Besides the larger number of scattering lobes for larger particles, the limiting
angles of different scattering orders also become much sharper and approach
the geometrical optics solution. For smaller particles these limits become less
distinct due to surface waves. As an illustration, two limiting angles predicted by
geometrical optics are marked in Figs. 4.29 to 4.32 with vertical dashed lines: the
furthest extent of first-order refraction (l9 s = 82.79 deg) and the rainbow angle
(l9 s = 137.9 deg).
Regions of strong oscillations also become smaller for larger particles, since
the oscillations arise partly from interfering orders. Important to note is that the
reflection at the Brewster angle no longer disappears for parLicles sizes near the
limit for geometrical optics, Fig. 4.32a.
For large particles and perpendicular polarization, reflection dominates in the
regions 75 deg < 19 s < 110 deg and 130 deg < 19 s < 140 deg, in some cases by a
factor exceeding 200 (Fig.4.30c). This suggests favorable conditions for phase
Doppler systems; however, for small particles this is no longer valid, since
high er scattering orders become much stronger. In fact, it is unlikely that a
phase Doppler system can size water droplets less than 10 IJ,m using reflected
light (Fig. 4.30a).
Clearlya correct layout of a phase Doppler system is not possible only on the
basis of the intensity distribution of reflection (N = P = 1), first-order
(N = P = 2) or second-order (N = P = 3) refraction. For water in air for instance,
the third-order refraction (N = P = 4) even exceeds reflection at some scattering
angles. For larger droplets, the fourth-order refraction (N = P = 5) achieves high
values near 19 s "" 40 deg (Figs.4.29c, 4.30c) and the 6th order refraction
(N = P = 7) at 19 s "" 130 deg (Figs. 4.29c, 4.30c, 4.31c, 4.31c). Also, the seemingly
large dominance of first-order refraction over reflection at the Brewster condition is diminished by rather strong contributions from third, fifth and eighthorder refraction (N = 4,6,9) (Fig. 4.32a).
116
a
4 Light Scattering from Small Particles
10'
::l
..:i.
.,q
<J<U
:5
10 '
b
c
45
90
--Surn
- - 2nd refraction
----<- Reflection
~ 3 rd refraction
-----1 st refraction
-----+---4 th
refraction
135
Scattering angle 13, [deg]
-~-~--~- 8th refraction
~ 5th refraction
- - - - 6th refraction
~ ~~~~ ~~~~ ~ i h refraction
- - - -- - ~ 9th refraction
Fig.4.29a-c. Intensity distribution of the first 10 scattering orders for different diameters
of water droplets in air calculated with geometrical optics (m = 1.333, Aw = 488 nm, perpendicular polarization, point-like receiver). The dominating scattering order is marked
with the correspondingvalue ofN. a d p =lOJ.tm, b d p =100 J.tm, c d p =1000 J.tm
4.1 Scattering of a Plane Wave
a
117
10'
::!
~
.€
.:§"= 10·'
b
c
- - - Sum
-=--1 ,t refraction
--'-- Reflection and - - - 2nd refraction
~ 3'd refraction
Diffraction
Scattering angle 1'J, [deg]
..... 7'n refraction
----T---4 tn refraction
~ stn refraction
stn refraction
- - - - 6tn refra ction
9tn refraction
Fig. 4.30a-c. Intensity distribution of the fIrst 10 scattering orders for different diameters
of water droplets in air calculated with LMT and Debye series decomposition (m = 1.333,
/Lw = 488 nm, perpendicular polarization, point-like receiver). The dominating scattering
order is marked wi th the corresponding value of p. a d p = 10 f-lm, b d p = 100 f-lm,
c d p = 1000 f-lm
118
a
4 Light Scattering from Small Particles
10'
::!
~
~
.-0;::
C3
0)
.5
10 '
90
--Surn
_ _ 2nd refraction
- - - Retlection
- - 1 " refraction
~4'h refraction
~ 3'd retraction
135
180
Scattering angle 0, [deg]
_._-~-~- 8 th refraction
--<>-- s'h refraction
- __ - 6'h refraction
- - - - - - ~ 9'h refraction
~~ ~.~~~~~
7'h refraction
Fig. 4.31a-c. Intensity distribution of the first 10 scattering orders for different diameters
of water droplets in air calculated with geometrical optics (m = 1.333, Aw = 488 nm, parallel polarization, point-like receiver). The dominating scattering order is marked with
the correspondingvalue of N. a d p =10 /-Im, b d p = 100 /.Im, c d p = 1000 /.Im
4.1 Scattering of a Plane Wave
a
119
(0)
- - 1 ,t refraction
--Sum
--'-- Reflection and - - - 2nd refraction
Diffraction
________ 3'd refraction
Scatteringangle tJ, [deg]
.... 7'h refraction
refraction
_._-_._. 8th refraction
---v-- 5111 refraction
- - - - 6111 refraction ------- 9th refraction
~111
Fig. 4.32a-c. Intensity distribution of the first 10 scattering orders for different diameters
of water droplets in air calculated with LMT and Debye series decomposition (m = 1.333,
Aw = 488 nm, parallel polarization, point-like receiver). The dominating scattering order
is marked with the corresponding value of p. a d p = 10 11m , b d p = 100 11m,
c d p = 1000 11m
120
4 Light Scattering from Small Particles
4.1.3.5 Intensity Dependence on Refractive Index
The real part of the relative refraetive index of the particle affeets primarily the
angular position of the seattering orders and the loeation of speeifie limiting angles. The diffraetion in forward seatter remains unaffeeted. The eurves shown in
Fig. 4.33 ean be computed from Eq. (4.20), whieh reduees to the following expressions:
• for total refleetion
I')TR
= 1t - 2aresin(m) = 2areeos(m)
(4.64)
• for the Brewster angle
I') p = 1t -
2 aretan(m)
(4.65)
• for the limiting angle of first-order refraetion (N = 2)
_{1t- 2aresin(m)1) m < 1
I')c- 1t -
• (m 2 aresm
(4.66)
m >1
• and for the rainbow angle in second-order refraetion (N = 3)
I') RB
f+-m2
f+-m2
= -4 aresin -1 - - - + 1t + 2 aresin - - m
3
The Brewster or polarization angle,
\
(4.67)
3
I') p
,
Brewster
\ angle
inereases with deereasing relative re-
Limiting angle of
1,I refraction
\
\
.. "
....
....
....
,;
,,
,
;
~
___ - - .... Rainbow angle of
2nd refraction
o
o
45
90
135
180
Scattering angle iJ, [deg]
Fig. 4.33. Dependence oflimiting angles on the relative refractive index
4.1 Scattering of a Plane Wave
121
fractive index, merging with the angle for total reflection (f) TR) at low values of
m. For m> 1 the angular range offirst-order refraction increases rapidlywith m.
The second-order rainbow exists in the range 1< m::; 2. These dependencies can
be identified also in the results presented in Figs. 4.34 and 4.35, showing the
scattering intensities of all scattering orders for various values of m smaller
(Fig.4.34) and larger (Fig.4.35) than 1. These results were obtained using the
Debye series expansion.
For relative refractive indexes smaller than unity (m < 1) and parallel polarization, the coincidence of total reflection and Brewster angle at small m leads to
strong intensity oscillations in the reflection curve, since the two effects directly
oppose one another. A phase Doppler photodetector placed at the Brewster angle to detect only second-order refraction (N =3) is only appropriate down to a
refractive index value of m = 0.75 and also demands good angular alignment. It
is much easier to chose a position at which reflection dominates, since also the
scattered amplitude is much larger, especially near angles of total reflection. For
relative refractive indexes less than unity (m < 1) the total reflection angle f)TR is
a good choice for a phase Doppler detector, since this is also the limiting angle
for first-order refraction (N = 2). It is evident from Fig. 4.34 that near the angle
of total reflection, the scattered intensity is almost independent of scattering angle, confirming the angular independence of the gain factor given in Eq. (4.17).
Indeed for m < 1 only reflection and the first two refractive orders are of any significance for the total scattered intensity. For perpendicular polarized light, not
shown here, even the second-order refraction is no longer significant. Thus, for
applications of phase Doppler when m< 1, the detectors are best positioned
where reflection dominates. However, a backscatter arrangement is not advisable since the dominance of reflected light is not strong enough.
A further three scattering effects for the case of m < 1 are noteworthy. Secondorder refraction (N = 3) exhibits very strong oscillations in forward scatter and
virtually no oscillations in backscatter. This is because two modes of second- order refraction exist in the forward direction and lead to interference, while in
backscatter only one mode is present.
A second effect is the dependence of the scattering lobe modulation depth on
the dominance of any single scattering mode. Whenever two scattering modes
or partial rays, e.g. reflection and refraction in Fig. 4.34 in backscatter, are approximately equal in amplitude, the modulation depth increases dramatically.
Finally, all higher order scattering modes (N > 3) exhibit a behavior similar
to the third-order refraction (N = 4), except with diminishing amplitude.
Therefore, for clarity, only the third-order refraction is shown in Fig. 4.34.
For a refractive index larger than unity (m > 1), the dynamics of the scattering
orders with changing refractive index are much more dramatic. A generalization
over many scattering orders is no longer possible since once the scattering angle
for the highest intensity of one scattering order exceeds 0 deg or 180 deg with increasing m, the sign of its dependency on m changes. One example is the thirdorder refraction (N = 4). The position of the highest intensity increases in
Fig. 4.35a,b. After reaching 180 deg, the position decreases with increasing relative refractive index, Fig. 4.35c-f. The number of such sign changes with m in-
4 Light Scattering from Small Particles
122
a
10'
=!
~
;...
"'
"
;:"
10 "'
b
c
10'
1 0 ) .r-L~~~~~~~~~~
10'
<}'Wl'5il'lii\~,WiI",,,
d
e
f
135
- - Sum (LMT)
- - Diffrac t ion and Reßecl io n (p
- - - I " refraction (p = 2)
Sca tt cring angle
= I)
-b--
2"" refract ion (r - .')
--0--:\ 'd refract ion (r - 4)
Fig. 4.34a-f. Intensity distributions for parallel polarized light and varying refractive indexes calculated by LMT with Debye series (d p =100f.lm, A=488nm, x M =643.77).
a m = 0.9, b m = 0.85, c m = 0.8, d m = 0.75, e m = 0.7 , fm
= 0.65
4.1 Scattering of a Plane Wave
a
123
10J
:::I
~
>-
"'"'-'
E
10 J
b
10 3
IO.J t:;:=.;::::t.L"==t:::=d'n:=hd9:....l'L~...L..........L.1.....::................-.....J<a:::...:..:..
I 0 3 .~or:-.......;t!....
c
d
IO ) ~~~~ ~~-L~~~~~~~~~~~~~~~~-L~~~~
IOJ ~l"-~-~
__
e
IO J
__
~J.....J........1~..4....L.......1..-.JL~.~::::r:::::l::::;.::::;~s21~=:;:=::;::::~~
o
135
IBC
um (LMT)
,d
rcfra cli on (p _ 4)
---<>---- Diffracli on and reOeclion (p - I) --.-<1'" rcfracliol1 (p - 5)
--0--1 " refraclio n (p 2)
_ _5'" refraclion (p - 6)
_ _ 2"" refraclion (/) 3)
- - - _6'h refraclion (p - 7)
Scaltering angle tJ, Ideg!
............7'" refraclion (p 8)
_._._._._lI 'h rcfraclion (p - 9)
--- --.9'" refraclion (p - 10)
Fig. 4.35a-f. Intensity distributions far parallel polarized light and varying refractive indexes calculated by LMT with Debye series (d p =100/lill, A=488nm, x M =643.77).
a m = 1.1 , b m = 1.2, C m = 1.3, d m = 1.4, e m = 1.5, fm = 1.6
124
4 Light Scattering from Small Particles
creases with the scattering order and is given by N -3. This can be seen directly
from the solutions for the angular deviation D(N) in Eq. (4.20).
The use of detectors for phase Doppler measurements at the Brewster angle is
only possible starting at a refractive index of m = 1.27, as seen in Fig. 4.33. However, at larger values of refractive index the signal may be disturbed by higher
order scattering contributions. A further possibility for positioning a phase
Doppler detector for m > 1.35 is in the range of dominant reflection near
Os = 135 deg, although the linearity of the signal phase difference with particle
diameter can also be disturbed here by higher order scattering for very small
changes of m.
This behavior has consequences for the operation of phase Doppler systems
since the refractive index is generally a function of temperature and may change
during a measurement. As an example, the refractive index of 1.4 is considered.
According to Fig. 4.35d measurements using reflected light in backscatter
(120 deg < Os < 140 deg) appear to be possible, since reflection dominates. However with changes of the refractive index to m =1.5, the 5th and 6th order refraction quickly gain in importance and will detrimentally affect the linearity between particle diameter and phase difference.
The imaginary part of the refractive index, determined by the conductivity of
the particle medium, is the second influencing factor of the scattering function.
Figure 4.36 illustrates the total angular scattering function for varying values of
the imaginary part of the refractive index. For a conductive medium, the influence of the imaginary part dominates the Fresnel coefficients. A large imaginary
refractive index part strengthens the reflection, in fact only reflection and dif-
-----+-- In = 1.333 - j 100
-----'-- m = 1.333 - j 0.891
-----<>--
=1.333 - j 0.02 (Rcileaion and
diffraction only, p = I, for 111 = 1.333)
In
. . . . . .. m = 1.333 -
j 0.00224
_ _ ",=1.333
45
90
135
180
SC3llcring angle t?, (°1
Fig. 4.36. Dependence of the scattering function on the imaginary part of the refractive
index fOr(A = 488 nm, d p = 50 J.tm, parallel polarization)
4.1 Scattering of a Plane Wave
125
fraction exist and virtually all of the incident wave is reflected. Due to the constant gain factor in Eq. (4.17), the reflection amplitude is essentially independent
of scattering angle.
As the imaginary part decreases, a portion of the ineident wave is refracted
into the particle and the scattering function corresponds to that of a transparent
particle. In this case the reflective portion of the incident wave is determined by
the real part of the refractive index. The light which is refracted into the particle
is strongly attenuated and cannot leave the particle as higher scattering orders.
The real part of the refractive index is significantly larger than the imaginary
part and essentially determines the Fresnel coefficients. However, the imaginary
part is important in determining the attenuation factor in the particle.
If the imaginary part is further decreased, the attenuation in the particle is no
longer so strong and some light willleave the particle. This happens first with
the first-order refraction, since the path length within the particle is the shortest
in this case. The higher orders follow with decreasing magnitude of the imaginary part. The point at which the imaginary part can be fully neglected depends
on the particle size. As already shown in Fig. 4.12, this occurs sooner for sm all
particles than for large particles. This underlines the necessity to compute calibration curves for phase Doppler systems which cover the actual, expected
ranges of particle size and refractive index. It is also important to consider all
scattering orders, not just the dominant ones. Using only a few scattering orders
can give an approximate indication of a suitable phase Doppler layout but cannot replace a full computation.
4.1.3.6 Internal Field and Near Field
To gain further insight into the parameter dependencies of the scattered light it
is instructive to examine the internal field and near-field scattering of the particle as illustrated in Fig. 4.37. In Fig. 4.37a the full scattering process is illustrated.
Outside the particle the ineident plane wave and the scattered wave superimpose. The ineident plane wave has been blanked out in 4.37b for better visualization of the scattered wave. The shadows behind the particle in Fig. 4.3 7a arise
due to interference between the incident wave and the diffractive part of the
scattered light. The same effect can be seen in Fig. 4.37c and d, where only the
contribution of reflection and diffraction is illustrated, with and without the ineident wave. The light area on the right in Fig. 4.37d is attributed to the diffraction part of the Debye decomposition p = 1, which is phase shifted by 180 deg
relative to the incident wave and has the same amplitude as the ineident wave.
Superimposing the ineident wave with the diffraction part results in the shadow
behind the particle, Fig. 4.37c. Furthermore, the disappearance of reflection at
the Brewster angle can be seen in Fig. 4.37d.
In Fig. 4.37e and f the intensity of the intern al field and the near field arising
from first-order refraction (p = 2) and second-order refraction (p = 3) is plotted
using Debye series decomposition. The focussing behavior of the particle in
first-order refraction and the rainbow in the second-order refraction can be
126
4 Light Scattering from Small Particles
a Scattered tield superimposed with
incident wave
b Scattered and interna I field only
Focal
poinl
FirSI -order
refraclion
(p
= 2)
rcfraclion
(f> = 3 , rainbow)
c Diffracted and reflected wave (p =1)
superimposed with incident wave
d Diffracted and reflected wave only
=1)
f Second-order refraction (p = 3) only
Fig. 4.37a-f. Distribution of intensity in the internal field and in the near field of a scattering particle, calculated by LMT and Debye series decomposition (..1 = 488 nm,
d p = 20 flm, m = 1.3 , parallel polariza tion)
4.2 Scattering of an Inhomogeneous Field
127
elearly recognized. The intensity distribution of the rainbow is already apparent
in the near field.
The superposition of all scattering orders results in Fig. 4.37b. In the right
part of Fig. 4.37b, additional fringes in forward scatter are visible, compared to
Fig. 4.37c,e. From Fig. 4.32 it is reasonable to assurne that these fringes come
from the interference between first-order refraction and reflection. In Fig. 4.37b,
the interference phenomena in backscatter can be identified as interference between different higher scattering orders, creating local maxima and minima of
intensity.
In the edge zone of the partiele, a elear structure can be identified in the
zoomed portion. This structure corresponds to so-called resonances of the partiele. Rays in this zone fulfIl conditions for total intern al reflection on every
surface and thus, never leave the particle. The light is coupled into this zone by
wave effects but the propagation can be described by geometrical optics (Roll et
al. 1999 and Roll and Schweiger 2000). The maxima and minima of intensity
arise due to resonance conditions being met around the circumference of the
partiele. The angular structure is due to the fact that both right and left running
waves exist, thus leading to standing waves.
Optical resonances similar to a laser cavity induce further effects in the scattering functions. The condition of resonance is fulfilled for specific partiele diameters and at these values the scattering function changes very rapidly with
small partiele diameter changes. This is also a limiting factor for the partiele diameter resolution of the phase Doppler technique, which is of the same order as
the wavelength of the incident light.
4.2Scattering of an Inhomogeneous Field
There are a number of approaches to compute light scattering for inhomogeneous incident fields; however, even a brief review of all of these techniques would
be too lengthy for the present purposes. The following discussion restricts itself
to two possible approaches, both ofwhich build on the solutions given above for
an incident plane wave. The geometrical optics solution will be extended to yield
the so-called Extended Geometrical Optics (EGO) approach. The Lorenz-Mie
solution will be modified to superimpose many incident plane waves, the sum of
which yields the incident inhomogeneous electromagnetic field. Fourier decomposition is used for this transformation, thus the technique is known as Fourier
Lorenz-Mie theory (FLMT).
Further details on other approaches for inhomogeneous fields can be found
in the literature (e.g. Hoekstra 1994, Gouesbet and Grehan 2000, Yeh et al. 1982,
Wriedt 1998, Doicu et al. 2000).
For this extension of geometrical optics and Lorenz-Mie theory to arbitrary
fields, all assumptions and coordinate systems introduced in section 4.1 can be
retained. One additional coordinate system, the beam coordinate system (BCS)
must be introduced. Thus, the wave coordinate system (WCS) is now coupled to
the beam coordinate system rather than to the main co ordinate system (MCS).
128
4 Light Scattering from Small Particles
To extend the geometrical optics approach, a plane wave will be postulated at
the incident point on the particle surface, with characteristics corresponding to
the actual field strength in the wes at that point. Similarly, the FLMT reduces
the computations to that of many plane waves, thus justifying all preliminary assumptions made in section 4.1. The five coordinate systems to be used are pictured in Fig. 4.38.
4.2.1 Extension to the Method of Geometrical Optics (EGO)
The theoretical basis to compute the light scattering using geometrical optics
has been outlined in section 4.1.1 for the case of an incident homogeneous plane
wave. The idea behind EGO to account for inhomogeneous fields is to identify
the position of all interaction points for all scattering orders reaching the detector surface, (see Fig. 2.7 in section 2.1 for the definition of incident, glare and
interadion points). The task is to compute the local amplitude, phase and
propagation direction of the incident wave at each incident point (Borys et al.
1998). The superposition of sufficiently many such waves, paying attention to
their correct phase, leads to particularly intuitive results compared to the computationally more complex Generalized Lorenz-Mie theory (Gouesbet et al.
1989) or Fourier Lorenz-Mie theory (Albrecht et al. 1995).
Dclcclor
Surfa..:c
y
/'lIes
z
Fig. 4.38. Coordinate systems for light scattering computations of incident inhomogeneous fields
4.2.1.1 Ray Tracing for EGO
The field distribution across the surface of the particle depends on the particle
position in the measurement volume. However, since the area which corre-
4.2 Scattering of an Inhomogeneous Field
129
sponds to that portion oflight eventually ending up at the detector is not known
beforehand, neither is the amplitude, phase or direction of propagation known.
The individual solution(s) for each scattering order must be determined iteratively, employing the rules of geometrical optics. The orientation of the partial
plane wave at the incident point differs generally from the bearn axis. Nevertheless, the iteration can begin by assuming that the propagation direction at the
incident point e w is coincident with the bearn axis e b , regardless of which interaction point is being considered. Figure 4.39 illustrates the necessary vectors to
be considered in determining the incident point on the surface of the particle.
For scattering of a homogeneous plane wave, these vectors are immediately defined once the incident wave vector, the detection direction and the refractive
index is known (see section 4.1.1). Because in the following description only one
incident laser beam and one scattering direction (one receiver) is analyzed, no
further indexes, as used in chapters 2 and 5 are necessary.
The basic rules of geometrical optics in vector form, as applied already in
section 4.1.1 (Hecht 1989), can be used to formulate the problem, i.e. the law of
reflection (N = 1)
er!) -e
pr
W
= 2e(!) cos().
I
(4.68)
reflection inside the particle (N > 2)
(4.69)
refraction into the particle (N = 2)
Fig. 4.39. Decomposition of an incident ray into reflection and refraction bya spherical
particle
130
4 Light Scattering from Small Particles
me(l)
-e =(cos8. -mcos8t )e(l)
t
W
(4.70)
1
and refraction out of the particle
meiN-I)
_eiN)
=(mcos8t -cos8.)e(N)
t
pr
I
(4.71)
Eliminating e~N) using
e(N+I) _ eiN)
e(N)= _ _ __
,
2cos8,
(4.72)
yields the ray path for the N'h scattering order when N 2':: 2 (Albrecht et al. 1996,
Borys et al. 1998)
-e w
e(l)
0
e(2)
0
=M GO e(3)
eiN)
(4.73)
eiN)
pr
with
A
B
0
0
0
0
C
D
C 0
0
0
MGO = 0
C
D
C
0
0
0
0
0
0
B A
m
A=cos8;-mcos8,+--- ,
2cos8,
1
C=----,
2 cos 8,
B=
(4.74)
m
2cos8,
1
D=---2cos8
cos8,
'
(4.75)
(4.76)
The rank of the matrix corresponds to the scattering order N. The superseripts (1) to (N) identify the various segments of the ray inside the particle. The
vectors e~~) and ew define the scattering angle iJ s
cosiJ s =e(N)·e
pr
w
(4.77)
of the respective scattering order N, after which the incident angle 8; and the
refractive angle B, = arcsin(sin 8; Im) for each ray and scattering order N can be
found using Eq. (4.20). Inverting the system of equations in Eq. (4.73) leads to a
solution for the coordinates of the incident points and glare points on the particle surface for each scattering order N (N 2':: 2; for N = 1 Eq. (4.68) is sufficient).
The incident electromagnetic field is sampled around each of the incident points
4.2 Scattering of an Inhomogeneous Field
131
and projected onto the detector using the governing relations described in section 4.1.1.
Knowing the field distribution within the laser beam, the amplitude E b , the
phase ({Jb and the propagation direction of the wavefront e w at each incident
point are also known (Eq. (3.59), (3.67». The divergence of an inhomogeneous
laser beam leads to small deviations in the orientation of the wavefront vector
e w at the incident point, which in turn yields a slightly different angle of incidence B; and scattering angle iJ, for a given scattering order. Thus, the correct
coordinates for the vectors e(1) ... e(N) must be found by iteration.
The iteration procedure used for all possible partial rays and scattering orders
which reach the detector can be expressed in terms of the following steps:
1. Definition of e w = eb (as for a plane wave), the scattering vector (see Fig. 4.38)
e pr = (rOr -rop)/lror -ropl and the scattering angle 0, = arccos(e pr ·e w );
2. The scattering angle iJ, leads to the incident angle B;, Eqs. (4.20) and (4.23);
3. Deterrnine the vectors e(1) ... e(N) and thus the interaction points rop + r pe(1)
and rop + rpe(N) on the particle surface using an inversion of Eq. (4.73) (Eq.
(4.68)for N = 1);
4. Compute the new wave vector e w at the incident point rop + rp e(1);
5. Correct the vector from the glare point to the receiver
e~~) = [ror - (rop + rpe(N» I/lror - (rop + rpe(N» I;
6. Compute the new scattering angle iJ, = arccos(e~~) 'e w );
7. Repeat steps 2 to 6 until the coordinates of the vectors rpe(1) ... rpe(N) no longer
change more than some prescribed amount t:« A (t: = 10-3 X A is generally
sufficient).
4.2.7.2 Intensity and Phase
In addition to determining the interaction points on the surface of the particle it
is also necessary with inhomogeneous fields to evaluate the modified phase rfJ~~J
for computation of the amplitude functions .S.\~), according to Eq. (4.30). Considering the ray path from the incident wave to the detector, the resulting phase
can be considered as the sum of various contributions, as in the case of a plane
wave (see Fig. 4.40).
The starting point is the phase of the laser beam at the incident point ({J~,N) of
the N th scattering order on the particle surface rop + r pe U,N).1 This phase can be
taken directly from the analytic description of the input beam. According to Eq.
(3.59), this would be for the case of a Gaussian beam
mU,N)=m(rU,N»)=_k [ Z(i,N)+
'rb
'rb
Op
b
0
( XU,N»)2 +(yU,N»)2J
0
0
2R ( (i,N»)
b
1
Zo
U,N)
+arctan~
1
(4.78)
Rb
To avoid confusion with the numbering of the scattering orders, the superscript (i,N)
will be used for the incident point and (g,N) for the glare point of the N ili scattering
order.
132
4 Light Scattering from Small Particles
x
,-'
"
Fig. 4.40. Refraction (N = 2) for a sphere positioned peripherally in a laser beam
where the position of the incident point is defined by
XU,N)j
rU,N)
Op
= r Op + rPe(l,N) = [ y~i'N)
0
(4.79)
Z(i,N)
o
The phase change of the incident beam between the center of the particle and
the incident point
(4.80)
is the first term, which contributes to the phase of the scattering function. Note
that this phase is not equal to rp k w • eU,N) for inhomogeneous waves, because the
wavefronts in general are not parallel to each other. The phase change within the
particle amounts to 1
t/J~N)
= -2(N -l)kw m rp cosB, '
k w =kb
(4.81)
The phase change between the glare point and the detector is
A,(g,N)
'I' pr
=-k w IrOr -(rOp +rp e(g,N))1
(4.82)
Similar to the case of a plane wave, the phase jumps due to reflection t/J~NJ,'P'
Eqs. (4.33) to (4.35), and due to the beam focussing t/J(P, Eq. (4.39), can be used
without change. The phase at the detector surface for each scattering order is
obtained by summing over all phase terms 2
m(N)
'rr
1
2
== mU,N) + A,(N) + A,(N) + A,(N) + A,(g,N)
'rb
'1',
'l'PO,ep
'l'fl
'l'pr
(4.83)
The sign depends on the definition of the wave, Eq. (3.22).
These relations are expressed in terms of a single scattering order N; however, a final
computation must include all partial rays of each scattering order.
4.2 Scattering of an Inhomogeneous Field
133
Because in Eq. (4.1) the phase change from the particle center to the detector
surface f/Jpr = -kwrpr is already considered and the initial phase of the incident
wave has no intluence on the scattering function, the phase of the scattering
function ~.\~) is given by
n,(N)
'l'zJ.'P
=
n,U.N)
'l'w
+ n,(N) + AN) + n,(N) + n,(g.N) _
'l't
'l'PzJ.'P
'l'fl
'l'pr
(4.84)
n,
'l'pr
The intensity coefficients i<:'J can be found using the same expressions as with
a plane wave, Eq. (4.28). The scattering functions relate the electric field strength
at the center of the particle to the scattered electric field strength. Therefore, the
electric field strength at the incident point Ei;·N) has to be related to the electric
field strength at the particle center Eb (rop ), and this intluences the magnitude of
the scattering function.
4.2.7.3 Summary ofthe Results
All quantities to compute the scattered field strength from Eq. (4.1) are therefore
available.
S(N)
_1
_
-
E~;,N) 0N)
(. n,(N»)
(
) VI 'P
exp J'I' 'P
Eb r op
and
S(N)
_2
_
E~;·N)
0N)
--(--)VI
zJ
E r
b
op
(. n,(N»)
exp
J'I'zJ
(4.85)
The electric field at the receiver can be computed by summing over all scattering orders and using the relation from Eq. (4.1)
(4.86)
(4.87)
In addition to the various scattering orders, the diffraction can be included
for the case of an inhomogeneous incident field. A simple approximation can be
obtained by assuming that the amplitude and phase of the incident wave does
not vary considerably over the diameter of the particle. Thus, only the amplitude
and phase of the incident field ~b at the position of the particle must be considered, as in Eq. (4.11). For larger particles, in which the amplitude and phase of
the incident wave cannot be considered constant over the particle diameter,
other methods must be employed. Possibilities include a numerical solution of
Eq. (4.10) or application of Eq. (4.11) to all plane partial waves of the Fourier
transformed incident wave. This latter method is outlined in the next section as
part of the Fourier Lorenz-Mie theory (section 4.2.2). Also a comparison of results using EGO and FLMT will be presented in section 4.2.3.
All scattering functions for all scattering orders are then available. For areal
detector the computation must be repeated for all the detector segments. The results are then transformed into the detector co ordinate system, Eq. (4.4), before
integrating over the active area of the detector, Eqs. (4.5) to (4.9).
134
4 Light Scattering [rom Small Particles
4.2.2 Description using Fourier Lorenz-Mie Theory (FLMT)
In signal theory, the analysis of instationary signals is often reduced to that of
stationary signals using a Fourier decomposition of the time series. The Fourier
analysis yields amplitude and phase distributions in frequency domain, typically
in discrete form. The response of the system to an instationary input can be
found by summing over all of the discrete frequency contributions.
In a very similar mann er, an inhomogeneous wave can be constructed as the
superposition over many plane waves, since light propagation is a linear phenomenon. In time series analysis the Fourier transform is between time and frequency domain. For an inhomogeneous wave in space, the two-dimensional
Fourier transform yields an amplitude and phase spectrum in wavenumber domain. Each individual spectral coefficient represents a homogeneous plane
wave. Thus, the inhomogeneous wave is decomposed into many homogeneous
plane waves. The contribution of each homogeneous plane wave to the scattered
field can be determined using geometrical optics or the Lorenz-Mie theory.
Summing over all contributions yields the total scattered field. This technique
falls into the category of Fourier optics (Goodman 1968, Menzel et al. 1974) and
is often called the plane wave approximation (Clemmow 1966).
In the following section the decomposition of an arbitrary inhomogeneous
wave into plane waves and, in particular, the constraints on the discretisation
will be discussed. As a special example, the transformation of a Gaussian laser
beam will be given. The scattered field will be obtained using the Lorenz-Mie
theory (section 4.1.2) and thus this approach is called the Fourier Lorenz-Mie
theory (FLMT).
4.2.2.1 The Spectrum of Plane Waves
According to Goodman (1968), an arbitrary two-dimensional field strength distribution extending in a plane z = zr can be transformed onto the image plane
using a two-dimensional Fourier transform
1
+00+-
f(l,m) = A? LLQAx,y)exp(jk(lx+my)]dxdy
(4.88)
(4.89)
4 is an arbitrary normalization factor, although it is useful to use the wavelength of light in the medium of propagation. The inverse Fourier transform
gives then the components ofthe initial input field (Clemmow 1966)
+00+-
Qx(x,y) =
JJE(l,m)exp[ -jk (lx + my)]dldm
(4.90)
QAx,y) =
-J
(4.91)
Jg(l,m)exp(-jk(lx+my)]dldm
4.2 Scattering of an Inhomogeneous Field
In the image plane (l,m) the transformed field
an electric field, namely
~(l,m)also
135
takes the form of
~2D(I,m) = exp"(l,m )+eyg(l,m)
(4.92)
Adding a third component B.(l,m) in the direction of e z
~(Z,m) = exp"(l,m) + ey g(l,m)+ ezB.(I,m)
(4.93)
leaves the initial field exQx(x,y)+eyQy(x,y) and the two-dimensional transformed field exP"(l,m) + eyQ(l,m) unaltered for z = zr.
The inverse transformation
--J
~(x,y,z)= J[exp"(I,m)+eyg(l,m)+ezB.(I,m)]
(4.94)
x exp( -jk[lx +my+ n(z -Zr )])dldm
now leads to a three-dimensional electric field distribution in (x,y,z) space. Due
to linearity, the term under the integral must still satisfy Maxwell's Eqs. (3.1)(3.3). This leads to the wave equation
~~(l,m)+k2~(l,m)=O
(4.95)
for which Eq. (4.94) represents a solution. The field must also be divergence free
div(E~)=O
(4.96)
therefore the wavenumber indices I and m determine n through
n=±.Jl-1 2-m 2 ,
f+m 2 :::;;1
(4.97)
The boundary condition Eq. (4.96) leads in the transformed plane to the relation
R (l,m ) =
-
1p"(I,m)+mQ(I,m)
n
(4.98)
The z component of the field is therefore determined by the x and y components. The essential point is that the spectrum is expressed as a field strength
spectrum and the integrand in Eq. (4.94) can be interpreted as a homogeneous
plane wave with the wave vector
(4.99)
and the vector of the electric field strength
p(l,m)j
~(l,m)= [g(l,m)
B.(l,m)
(4.100)
136
4 Light Scattering from Small Particles
k is the magnitude of the wave veetor, i.e. the wavenumber, and the spatial frequencies (l,m,n) are the direetional eosines of the wave veetor. The inhomogeneous field in the original domain has thus been deeomposed into a spectrum of
homogeneous plane waves in the transform domain. The field strength and the
wave veetor are orthogonal for eaeh homogeneous plane wave, i.e.
~(l,m) .k(l,m) = 0
(4.101)
The amplitude speetrum E(l,m) and the phase speetrum rp(l,m) are given by
Eq. (4.100).
The eleetrie field strength in the original domain is obtained by integrating
over all homogeneous plane waves in the transformed plane, as expressed by
Eq. (4.94). These relations are pietured in Fig. 4.41.
After transformation, the three-dimensional eleetrie field strength is represented by a speetrum of homogeneous plane waves with their wave veetors all
ending on a sphere of radius k. The amplitudes and the phases of the two eomponents of the electrie field strength perpendieular to k are related to E. and Q as
follows:
E e =
wx
_wx
(p .J ~1-m2
2
1-1 -m
2
+ _Q
m1
~
nvl-m-
1
(4.102)
e wx
(4.103)
This implies that the
Zw
eomponent of the eleetrie field of eaeh homogeneous
k lD (I,III) = -2lt ( I )
A.
111
Transforma tion
plane
Wave veclors 0 f
plane wave
k
waves
Plane of
reconslruclion
BCS ...~----____~~~~~~~__________-:z.
(MCS)
Fig. 4.41. Interpretation of the spectrum in image domain as plane waves in original domain
4.2 Scattering of an Inhomogeneous Field
137
plane wave is zero, as expected for a medium with no damping
(4.104)
!iwz =0
The field vector in coordinates of the partial plane wave is
(4.105)
The direction of the two electric field components and the propagation direction
ofthe homogeneous planes are given by
ml
n
~1-m2
e wx =
0
1
~1-m2
e wy =
~1-m2
-~1-m2 ,
mn
~1-m2
e_
=[:J
(4.106)
The wave vector in the coordinate system of the partial waves is therefore
(4.107)
The reconstruction of the three-dimensional field vector at an arbitrary point
ZI =Z-ZT gives the propagation
distance of the homogeneous plane waves in the direction perpendicular to the
transformation plane. For the reconstruction of the two-dimensional field
strength from Eqs. (4.89) and (4.90), ZI is equal zero, ZI = Z - ZT = 0, and the
situation simplifies such that all three-dimensional wave vectors are now projected onto the Z = ZT plane. Note that these projeeted vectors have different
wavenumbers.
Even if only the x and/or y component of the inhomogeneous field strength in
the transformation plane is known, the conditions in Eqs. (4.95) and (4.96) lead
through Eq. (4.98) to the Z component for a wave which propagates in the
Z direction. The coordinates in the spectral domain can be used as directional
eosines of the plane wave vectors in the original domain.
Equation (4.97) states that for n > 0, the energy transport of an inhomogeneous wave is in the positive Z direction and that the incident wave also propagates
in the positive Z direction. For n < 0 the energy transport is in the negative
Z direction. To keep the integration limits for 1and m symmetrie about zero, the
transformation is chosen perpendicular to the Poynting vector of the inhomogeneous incident wave.
An inhomogeneous wave is constructed as the sum of a number of plane
waves with various amplitudes, phases and propagation directions but with the
same wavenumber.
(x,y,z) is given by the Eq. (4.94). The value
Transformation of a Gaussian Beam. The transformation of a Gaussian beam
(seetion 3.1.4.2) into aplane wave spectrum will be given as an example.
138
4 Light Scattering [rom Small Particles
Equation (3.59) gives the Yb component of a polarized Gaussian beam depending on Zb' The transformation can be placed at an arbitrary Zb = ZT position
in the beam by
1
+=+=
g(l,m)=y f fgYb(Xb'Yb,Zb =zT)exp[jkb(lxb+mYb)]dxbdYb
b
(4.108)
-==
If polarization in the x b direction exists, the second component can be written as
1 +=+=
r.(l,m) =yb __
f f= gXb(Xb'Yb,Zb =ZT )exp[jkb(lxb+ mYb)]dxbdYb
(4.109)
These integrals can be solved analytically and the field strengths of the plane
waves in the spectrum are
(4.110)
(4.111)
Figure 4.42 illustrates the amplitude and phase distributions of the field
strength for a laser beam in each of the original and image domains respectively.
Note that the Fourier transform of a Gaussian distribution is also a Gaussian
distribution, as exhibited by the function Q in this figure. However, it is also
noteworthy that the Q distribution would remain unchanged, regardless of the
ZT value at which the original x b - Yb plane was chosen.
Nevertheless, it can still be recommended to choose the original plane at a ZT
position where the desired inverse transform is sought, since extrapolation errors in the phase increase for z\ = Zb - ZT values farther removed from the original plane.
4.2.2.2 Numericallmplementation
The implementation treats the integrals in Eqs. (4.88) and (4.89)as summations
for any position of the transformation plane ZT:
(4.112)
4.2 Scattering of an Inhomogeneous Field
a
b
W.), I
0.8
139
lliob)' I
0.6
0.1
0.2
100
o
c
3xlO'
o
x.
IQI
W••),I
o
Y. [).ImJ
- 100
l).I mJ 100
100
y.l).ImJ
100
d
2x 10'
17.68
17.7
0.01
0,01
0,0 I
11-1
0.0 1
0.0 1
o
1111-1
1 [- J 0.0 1
f
e
.>xlO'
2XIO'
11-1
0.01
0.0 1
Fig. 4.42a-f. Amplitude and phase of a laser beam in the original domain and the image
plane (Ab = 488 nm, rwb = 50 /lII1). a,b Relative amplitude and phase of electric field
strength ofthe laser beam at Zb = 1 ~m, c,d Amplitude and phase ofthe spectrum ofplane
waves transformed at ZT = 1 ~m , e,f Amplitude and phase of the spectrum of plane waves
transformed at ZT = 1000 ~m
(4.113)
as also those in Eqs. (4.90) and (4.91)
140
4 Light Scattering from Small Particles
(4.114)
(4.115)
with
Xi
= -xmax + Ax(i -I) ,
Iv =-lmax +AI(v-I),
Yj
= - Ymax + Ay(j -I)
m w =-mmax +Am(w-I)
(4.116)
Al and Am are the sampie intervals in the image (transformed) domain and Ax
and Ay are the corresponding intervals in the original domain. The inverse
transform of Eq. (4.94) for a three-dimensional field distribution in terms of
summations is given as
N,. N"
~(Xi'Yj'Z) = II[ex!!Jlv,mw)+eyg(Zv,mw)+ ezR(Zv,mw)]
v=l w=l
(4.117)
x exp( - jk[lvxi + mwYj +n(Zv,mw)(z - ZT )])AIAm
together with Eqs. (4.97) and (4.98).
Sampie Interval. The original wave can be reconstructed to any degree of accuracy by specifying an appropriate number of component plane waves
N 2 = N/N m • The task is to choose an appropriate number N and the sampie intervals Al and Am. This issue is weIl known for the discrete Fourier transform
and a comparison with other application fields is instructive in choosing the
number N and the sam pie intervals.
The Fourier transform for equally spaced sampies ai , i = 1,2, ... ,N is given by!
Av
_
-
1
~ exp[.J 21t(V-I)(i-I))
r;::; L... ai
"I/N i~l
(4.118)
N
For the two-dimensional Fourier transform Fv,w of the function f,j, i = 1,2, .. . ,N
and j=I,2, ... ,N
V,w
IN
_ 1
LN F exp(.J21t--'----------'---'---------'-------'----'--'---'(V-I)(i-I)+(W-I)U-I)]
N i~l j~l J ',J
N
F --
(4.119)
Comparison ofthe two Eqs. (4.112) and (4.119) leads to
AxAy
E(Zv,mw)=~NFv,w
(4.120)
with
1
Several different normalization factors and signs of the phase are in use in defining the
Fourier transformations.
4.2 Scattering of an Inhomogeneous Field
lvx;
(v-nU -1)
A
N
141
(4.121)
The transform between P(l ,m ) and F can exploit symmetry conditions in
the periodic transformation: leading to v,w
A v-I
1 =--v
Llx N
1 =
v
far
A N -(v-I)
Llx
N
N
l:S;v:S;-
2
(4.122)
for
N
-+I:S;v:S;N
(4.123)
for
N
l:S;w:S;-
(4.124)
N
-+I:S;w:S;N
(4.125)
2
and
A w-l
m =--W
Lly N
m =
W
A N-(w-l)
Lly
for
N
2
2
These relations lead then to the interval spacing in the image plane (Llv=I,
Llw=l)
A
Lll = lV+l -lv =- - ,
(4.126)
LlxN
Thus, relations between the sampIe intervals in the original and in the image
domain have been established. Although these intervals can be chosen arbitrarily, the choice in the original domain should be made such that the beam is not
truncated significantly (see section 3.2.2)
2
rmax -_~ x max
+ Ymax
2
>2 rmb
-
(4.127)
For large particles or particle positions at a large distance from the beam axis,
the particle surface can exceed the limit of rmb • In this case the periodicity of the
discrete Fourier transform can distort the intensity profile. For such cases a
larger distance r has to be inserted into Eq. (4.127) for rmb •
2
rmax =~ x max
+ Y max
2
->2 r
(4.128)
The sampIe interval in the image domain determines the accuracy with which
the laser beam can be reconstructed from the sum over all partial plane waves.
Experience has shown that in the image domain, amplitudes down to about a
e-8 amplitude decay should be considered. Using Eq. (4.110) for a Gaussian
beam, this threshold becomes
(4.129)
and the amplitude bandwidth is then
142
4 Light Scattering from Small Particles
(4.130)
Thus, the number of partial waves N and their extent in wavenumber can be
determined as follows:
• The sampled region in the original domain of the laser beam is chosen as
(4.131)
For particle positions X5 p + Y5 p > '~b or for particle diameters
sampled region is computed as
'p
> 'mb' the
(4.132)
This situation may occur with large particles, where one side of the particle
lies far beyond the 2 'mb limit of the laser beam.
• The sampIe interval in the image domain is calculated according to
Eq. (4.126)
A
Al = Am = _ b _
2'max
(4.133)
• The sampled region in the image domain is chosen as the e- 8 amplitude decay, giving the bandwidth according to Eq. (4.130) as
I
max
=m
max
= Abmax
2
=2-J2~
1t 'wb
(4.134)
• The number of sampIe points is then given as the ratio of the bandwidth to
the sampIe interval
Ab
Al
Ab
Am
I
Al
m
Am
8-J2 r
N=-=--=2-'!:!!J2:..=2~=--~
1t 'wb
(4.135)
• The total number of partial plane waves is N 2 •
As an example, laser beams with a wavelength of Ab = 488 nm and beam
waists of 'wb = 10 J.!m ; 50 11m; 100 11m are considered. The amplitude and phase
at four points are computed via the inverse transform. The results are compared
with those using Eq. (3.59) (Kogelnik and Li 1966) in Table 4.2. The normalized
deviations lie typically weH below 1%, validating this method of representing inhomogeneous waves.
In Fig. 4.43 the accuracy of the reconstructed beam as a function of the number of sampIes and the sampled region is plotted. If the sampled region is too
small, the spectrum is truncated and the reconstructed beam is incorrect, regardless of the number of sam pIe points chosen. If the number of sampIe points
is chosen too small, the sampled region in the spectrum becomes too large and
an error also occurs. The sampIe interval depends on the sampled region and on
the number of sampIe points. Therefore the gradient in the right part of Fig. 4.43
4.2 Scattering of an Inhomogeneous Field
143
Table 4.2. Comparison of amplitude and phase of laser beams according to Eq. (3.59) and
using the inverse transform of a discretely sampled Fourier transform according to Eqs.
(4.110) and (4.114) for the points A(rwb/2,rwb/2,0.1I.lm), B(2rwb ,2rwb ,O.ll.lm),
C(rmb /2, Y,nb /2,1 mm) and D(2rmb , 2rmb , 1 mm) (Ab = 488 nm). The transformation plane
is always located at ZT = o. # The error ofthe phase is normalized by 360 deg
Point Waist Amplitude field strength
rwb
Original
[flm] [Vm
A
10
B
Error
Original Reconst. Error#
Imax
N2
[Vm
[% ]
[deg]
[ -]
[ -]
l]
[deg]
0.6065307 0.6065303 6.12xlO- s -73.7660 -73.7656
6.24x10 5
0.324
4.71xlO-4
0.302
[% ]
1.1lxlO- 6
0.0439 49
-73.8328 -73.7837 l.36xlO-4 0.0439 400
-52.1886 -52.1918 8.89X10- 6 0.0439 169
0.790916 0.333229 1.27xlO-3 0.0439 1369
0.6065307
0.0003355
0.6053632
0.0003348
100
0.6065307 0.6065303 6.24X10 5 -73.7704 -73.77
1.11X10 6 0.0043949
0.0003355 0.0003344 0.324
-73.7711 -73.7216 l.38X10 4 0.00439400
5
0.6064575 0.6064579 6.02xlO- -64.4731 -64.4724 1.94X10 6 0.0043949
0.0003354 0.0003343 0.335
-71.1481 -71.1363 3.28X10 s 0.00439400
C
0
0.6065303
0.0003344
0.6053661
0.0003338
-73.7703
-73.773
-63.1426
-89.8427
l.39XlO- 6 0.0087949
l.38X10 4 0.00879400
-63.1415 3.06x10 6 0.0087949
-89.9402 2.71X10 4 0.00879400
50
B
A
B
C
0
Reconst.
0.0003355 0.0003344 0.324
0.3283150 0.3283219 0.00208
0.0001816 0.0001822 0.358
C
0
A
l]
lE:byl Phase field strength arg(E:b)
-73.7698
-73.7235
Poinl B in Table 4.2
Samp led region
1",,,,, .111,,,,,,, I-J
0,15
40
Fig. 4.43. Dependence of the normalized error of the reconstructed electric field strength
on the number of sampie points and sampled region. The maximum error is estimated by
comparing the original and the reconstructed field strength at 441 equally spaced points
in the original domain -2rwb < x < 2rwb and -2rwb < Y < 2rwb (Ab = 488 nm, rwb = 10 I.lm)
144
4 Light Scattering from Small Particles
is not parallel to an axis. The plateau for a large number of sampie points and a
large sampled region is caused by round-off errors of the computer.
4.2.2.3 The Fourier Lorenz-Mie Theory (FML T)
Using the spectral decomposition of an inhomogeneous electromagnetic wave
into partial plane waves allows existing solutions of light scattering for a plane
wave to be generalized to inhomogeneous waves. The example of the LorenzMie theory generalized to the Fourier Lorenz-Mie theory will be discussed as an
example.
For each ofthe indices (l,m) the Lorenz-Mie theory (Eqs. (4.1), (4.48) - (4.51))
can be applied to compute the contributions of each partial plane wave to the
scattered intensity (Colak 1978, Albrecht et al. 1995).
The final result is obtained by a summation over all scattered contributions
from the plane waves, preserving the correct phase. This corresponds in principIe to the inverse transformation back to the original domain.
Generally, the geometrie relation between the incident wave vector, the partiele and the receiver position will be different for each partial plane wave. First,
the field strengths ~(l,m) of the partial waves from Eq. (4.100) are considered.
The phase is with reference to the origin of the transformation plane rT • If the
center of the partiele is not coincident with the origin, than the separation must
be accounted for as a propagation distance of the partial wave.
~p(l,m) = ~(l,m )exp[ -j k(l,m). (rop - rT)]
(4.136)
The field strength gp(l,m) ineludes the polarization of each incident plane
wave. It is this field strength which is used as an incident wave for the LorenzMie computation. The two polarization components of each partial plane wave
lying perpendicular to the propagation direction can be computed according to
Eq. (4.106).
_
~wp(l,m)- [
I 2
-Jl-m
mn
n
2 O
-Jl-m
ml
-Jl-m 2
-Jl-m 2
~
J
~p(l,m)
-Jl-m 2
: n;;t;][pJ~ ~M.!L"eXJ{-jk(l,m)(r",
[~
ml
(4.137)
-r,
II
The required components perpendicular and parallel to the scattering plane,
according to Eq. (4.1), are given by
~LMT(l,m)= (
-sinIP,(l,m) COSIP,(l,m)J
(1).
coslP"m
(I
smIP"m
) ~wp(l,m) =M9'~wp(l,m)
(4.138)
4.2 Sca ttering of an Inhomogeneous Field
145
Using the scattering angle 1'J" which is now dependent on 1 and m, the scattering
functions are given by
. 21 (1'J,(Z,m)) = Lf!nll"n{ 1'J,(Z,m ))+ Qn T n{1'J,(I,m))
(4.139)
n=l
..22 (1'J s(Z,m)) = Lf!n T n{1'J,(I,m))+ Qnll"n{ 1'J,(I,m))
(4.140)
n=l
The scattered field in the far field for each partial plane wave is given by
(I ) = exp( -jkwrpr )
-E scw ,m
kwrpr
(..21 (1'J,(I,m))
0
)
(I)
0..22 {1'J, (I,rn )) -E LMT ,m
(4.141)
The scattering from the inhomogeneous wave is then given by integration or
summation over all scattered partial waves. This corresponds to the inverse Fourier transform from the image plane to the physical plane. The exponential
function required for the inverse transformation enters through Eq. (4.136).
(4.142)
It is important to remember that the field strength vector given by Eq. (4.141)
depends on the coordinate system chosen, since the scattering angles depend on
1 and m. Before integration ofEq. (4.142), all field strengths must be expressed in
the same coordinate system and that of the receiver is the most convenient. The
transformation matrix is denoted as M ß , as introduced in Eq. (4.4).
To summarize, the computation of the scattered field using FLMT can be expressed in matrix notation as
~r =
exp( -jkwrpr ) J= =J
k r
Mß(I,m)Ms(I,m)Mq>(I,m)Mw(I,m)
w
pr
(4.143)
-00--00
X~2D(I,m)exp( -j[ k(I,m ).(rop - rT )]) dldm
Similar to this solution for the far field, allother solutions based on incident
plane waves can be extended to the case of inhomogeneous waves, in particular
the solution for the near field or intern al field. For the near field, Eqs. (4.139)
and (4.140) are replaced by Eqs. (A.35) to (A.37) and for the intern al field, by
Eqs. (A.44) to (A.46). Equation (4.141) then yields a three-dimensional field
strength vector, which also contains a radial component. It is important to note
that for the near field, the radial phase dependence, expressed in the exponential
function exp(-jkwrpr ) in Eq. (4.143), is already included in the scattering function ..21,2.
Also the Debye series decomposition of the LMT solution, as described in
section 4.1.2, can be extended to the case of inhomogeneous waves in this manner. In this case, the scattering function will depend on which scattering order is
146
4 Light Scattering from Small Particles
being considered and the total contribution from scattering order p can be computed according to Eq. (4.143)
Decomposition into scattering orders of the near field and internal field proceed in a similar manner.
4.2.3 Scattering Characteristics of an Inhomogeneous Field
The most common inhomogeneous incident wave is the laser beam, which exhibits in general a Gaussian beam intensity profile (Davis 1979). Because the intensity of the incident beam is spatially shaped and not constant in space like a
plane wave, the scattering properties are now dependent on particle position.
The intensity in the near field of a spherical particle with diameter of 20 J.!m
moving through a laser beam of 10 J.!m beam waist diameter is shown in Fig.
4.44. The intensity is calculated with the FLMT and the beam axis is marked with
an arrow on the left of each diagram.
In Fig. 4.45 the scattered intensity in the far field is given as a function of
scattering angle iJ s for the same configuration as in Fig. 4.44. In comparison to
the plane wave case, Fig. 4.13, the scattering functions are asymmetrical. The
particle surface is partially illuminated and only these areas are relevant for the
scattered intensity. For the plane wave the complete scattered field is translated
in space with any motion of the particle, whereas with an inhomogeneous incident wave the scattering function changes during the passage of the particle. For
any point in space, the amplitude and phase of the scattered field will also depend on the position of the particle in the incident beam.
In Fig. 4.46 several scattered rays as computed using EGO are shown for
comparison with the FLMT results.
The use of Debye series yields a graphical representation which immediately
lets the result be interpreted in terms of geometrical optics. In Fig. 4.47 the internal field and the near field are separated using Debye series decomposition
for the case of Fig. 4.44d. In comparison to Fig. 4.37 it is reasonable that only a
part of the scattering function is selected with a shaped beam. The particle regions which are not illuminated suppress regions in the scattering function. A
good example for this is the Brewster angle for reflection. On the illuminated
side of the particle, the Brewster angle is clearly visible, whereas on the lower
part of the particle the scattering function of reflection is completely suppressed
and the characteristic of the Brewster angle has no influence on the scattering
function.
The scattered intensity of a given scattering order at a specific angle is proportional to the intensity at the incident point for the selected ray path. For the
case of a plane wave, the incident intensity is equal for all incident points. In the
4.2 Sca ttering of an Inhomogeneous Field
147
case of an inhomogeneous incident wave, the intensity at the incident point is
dependent on the partide position. The intensity at the incident point of each
scattering order is weighted with respect to a homogeneous incident wave.
The results shown in Fig. 4.45 are repeated in Fig. 4.48 but with the decomposition into various scattering orders. It can be seen that for any given scattering
angle, the relative magnitude of the various scattering orders can change with
partide position in the incident beam. The contribution of any one scattering
order to the total intensity distribution decreases with the distance of the incident point from the axis of the laser beam.
In Fig. 4.48 the scattering function of first-order refraction for aplane wave
with the same intensity as that on the laser beam axis is additionally plotted. The
curve for the inhomogeneous case touches this symmetric curve at different positions. The scattering orders appear to rotate as the partide moves through the
beam.
Furthermore, interference effects can be recognized, which lead to intensity
oscillations and local intensity maxima and minima. There are two types of interference phenomena present. One is between different scattering orders and
the other is with light of the same scattering order but different scattering
mo des. The latter is known as the rainbow for each scattering order (see section
4.1.3.3). The rainbow of the second-order refracted light is only present for partide positions from x op = 3 11m to 9 11m (Figs. 4.48b - 4.48d). In the other cases,
the incident field illuminates only one of the two incident points significantly.
Therefore, scattering orders or partial modes can be suppressed with a shaped
beam depending on partide position. When a partide moves through a beam,
the dominating scattering mode for a given receiver position can change with
partide position. This can lead to a temporal separation of the various scattering
orders on a fixed detector, which is not observed for a homogeneous wave.
Clearly this dynamic behavior of the scattered field with partide motion has
direct consequences for the laser Doppler and phase Doppler measurement
techniques. For a given detector position the amplitude, the phase and the composition of the scattered field in terms of scattering orders will depend on the
partide position. This is the physical origin of the "Gaussian beam effect" or
"trajectory effect" (section 8.3.1) as known from the literature about the phase
Doppler technique.
For partides of diameter much sm aller than the beam waist, the scattering
from an inhomogeneous field tends towards the plane wave case. If the amplitude deviation of the incident light is limited to 5% ... 10% across the partide, the
maximum allowable partide-diameter-to-beam-waist ratio is about
d p < (0.2 .. .0.3)dwb (dwb-diameter of the beam waist). Nevertheless, the influence
of the shaped beam is basically determined by the distance of the incident points
to the axis of the beam, which varies with partide size, partide position, refractive index and receiver position. For larger partides the inhomogeneous nature
of the incident wave must be accounted for. Together with the signal generation
analysis presented in chapter 5, an approximation for evaluating this influence
in laser Doppler and phase Doppler systems is given in section 8.3.1.
148
4 Light Scattering from Small Particles
-;::- 40
c
::1.
><
c
.9 20
.;;;
o
Q..
o
- 20
40
40
E
::1.
><
c
.9 20
'"o
Q..
o
-20
40
_ 40
WI:l........ . -
E
::1.
><
C
.g
20
"§
Q..
o
-20
-20
o
20
40-40
Position y [flm]
-20
o
20
10
Position y [flm]
Fig. 4.44a-f. Scattered intensity of the near field and internal field of a 20/lll1 particle as a
function of particle position in a Gaussian beam of radius rwb = 5 J.Lm calculated with
FLMT. The incident beam is indicated with white lines (x op = Yop = zOp = 0 J.Lm,
d p = 20 /lll1, m =1.333, Ab = 488 nm, rwb = 5 J.Lm, parallel polarization). a Xb = 0 /lll1,
b Xb = 3 J.Lm, c Xb =6 /lll1 , d X b = 9 /lll1 ' e Xb = 12 J.Lm, f Xb = 15 J.Lm
4.2 Scattering of an Inhomogeneous Field
a
90
c
90
b
90
d
270
90
270
Xp
149
=9 11m
o
270
e
90
270
90
f
Xp
=151l1ll
o
270
- - - - Scattering function laser beam
270
Scattering function plane wave
Fig. 4.45a-f. Total scattered intensity in the far field (logarithmic scale) for cases shown in
Fig. 4.44 calculated with FLMT. The diffraction peak at 0 deg is excluded for clarity
(dl' = 20 Ilm, m = 1.333, Ab = 488 nm, rwb = Sllm, parallel polarization)
150
4 Light Scattering from Small Particles
E
40 ~rnnTwr~TTrT__
:::1.
c
.2
20
20
o
20
Positi on
10
Z
[jl m)
Fig. 4.46. Visualization of the light paths for different scattering orders calculated with
extended geometrical optics in comparison with the near and internal field calculated
with FLMT (x op = YoP = z op = 0 11m, d p = 20 /lffi, m = 1.333, Ab = 488 nm, rwb = 5 /lffi,
Xb = 10 11m, parallel polarization)
4.2.3.7 Comparison between Extended Geometrical Optics and FLMT
As in the case of a plane wave, both calculation methods, Fourier Lorenz-Mie
theory and extended geometrical optics complement one another for the calculation and interpretation ofthe scattering diagrams. Figure 4.49a shows the total
scattered intensity for a 300 Ilm water droplet in a 100 Ilm laser beam waist as a
function of the scattering angle for the three methods (LMT, FLMT, EGO). The
FLMT and EGO solutions agree very weIl with one another but deviate considerably from the Lorenz-Mie theory result, as expected.
In Fig. 4.49b the gopd agreement between results of the two methods is emphasized by also plotting their difference as a function of scattering angle. Particularly good agreement is found in regions where one scattering order dominates, for instance in backscatter with second-order refraction. The largest
deviations occur in regions in which scattering orders are mixed, for instance
near 30 deg with first and second-order refraction or at 80 deg with reflection
and third-order refraction. The largest deviations occur coincident with large
negative dips in the scattering function, corresponding to destructive interference between scattering orders. The smallest variations of computed amplitude,
for example through neglect of surface waves in EGO, can therefore lead to rela-
4.2 Scattering of an Inhomogeneous Field
S
151
40
~
><
t:l
.Si 20
.~
0
"'"
0
-20
S
-40
40
~
><
t:l
0
:.s
20
'"0
"'"
0
-20
S
-40
40
~
><
t:l
:~0
"'"
20
0
-20
-40
-40
-20
o
20
40-40
Position y [[lm]
-20
o
20
40
Position y [[lm]
Fig. 4.47a-f. Scattered intensity of the near field and internal field of a 20/lID particle decomposed in scattering orders with Debye series. The incident beam is indicated with
lines (x op = YoP = zop = 0!lm, d p = 20 !lm, m = 1.333, Ab = 488 nm, rwb = 5!lm,
Xb = 10 !lm, parallel polarization). a Incident beam and reflection, b Reflection only,
c First-order refraction, d Second-order refraction, e Third-order refraction, f Fourthorder refraction
152
4 Light Scattering from Small Particles
a
90
..
b
.
:
)f. ~-'"
,.,.•.~...
. . . ........ _ .).
l'
~~ ~
'~'...
~.~m:::
,"
:.:..
..
o
':'''' - -
90
o
270
d
x , = ~I-\ nl
90
x , = 91-\ nl
270
90
c
'"
. ....
270
c
90
270
90
....
270
- - - - - , Diffraction and retlection (p = 1)
p = 2 .................. P = 3
Refraction:
-0--
270
1 st order refraction plane wave, p = 2
P=4
'"
P= 5
•
P=6
Fig. 4.48a-f. Intensity distribution in the far field (logarithmic scale) of various scattering
orders from ca ses Fig. 4.44 calculated with FLMT and Debye series decomposition
(d p =20 /lIIl, m =1.333, Ab = 488nm, rwb =5 f.lm, parallel polarization).
4.2 Scattering of an Inhomogeneous Field
153
~ 10 '
Q
.:
~
10'
:::'-'0
c:.. 10 '
"0
0)
>.<;
u
er"
10 •
10'"
3:
10 •
L-
":::
0
Q.
"uc:
"
L-
~
es
45
90
Fig. 4.49a-c. Comparison of scattered power as a function of scattering angle computed
using LMT, FLMT and EGO (Ab = 488 nm, rwb = 50 /ll11, d p = 300 /ll11, ro, = 200 mm ,
A, = 3.1415 mm' , point-like receiver, PI =1 W, ro p =0, EGO: sum over flrst 9 scattering
orders). a Comparison between received power calculated with LMT, FLMT and EGO,
b Absolute difference between FLMT and EGO, c Relative deviations between FLMT and
EGO
tively large normalized errors. However, for finite detector sizes, these effects
become negligible due to their very low absolute amplitude and very restricted
spatial extent.
Figure 4.50 shows the decomposed scattered field for each of FLMT with Debye series and EGO separately. Also here the good qualitative and quantitative
agreement of the results is evident.
Figure 4.51 provides even more details in comparing the two methods by examining individual scattering orders and the difference between results com-
154
4 Light Scattering from Small Particles
Scallering angle iJ, Idegl
--A----
FLMT: Diffraction and reflection (p =1), EGO: reflection (N =1)
--{)-1 ,I refraction (p, N =2)
- - 2nd refraction (p, N =3)
~
refraction (p, N =5)
1h
-<J--- 5
refraction (p, N =6)
-----o--7 1h refraction (p, N =8)
----t>- 81h
refraction (p, N =9)
41h
___ 3'd refraction (p, N =4)
---D---
6th refraction (p, N =7)
Fig. 4.50. Comparison of the first 9 scattering orders as a function of scattering angle
computed using FLMT and EGO from case shown in Fig. 4.49
puted using the two methods. At very small scattering angles (Fig.4.51a) the
differences are large since FLMT provides reflection and diffraction together.
For this calculation the EGO computation does not account for diffraction. For
first-order refraction (Fig. 4.51b) good agreement between the two methods is
found up to about 83 deg, beyond which the surface waves (Hovenac and Lock
1992) become dominant in the FLMT solution. These are not accounted for in
EGO, however the deviations shown in this diagram provides a first estimate of
their magnitude. Similar estimates can be made for the high er scattering orders,
second-order refraction (Fig. 4.51c) or third-order refraction (Fig. 4.51d).
Generally the deviations between methods increase near the limiting and
rainbow angles, Eqs. (4.44), (4.66)-(4.67); however, since the absolute amplitudes here are small, little effect on the final result integrated over a detector
surface is observed, as seen from Fig. 4.49.
4.2 Sca ttering of an Inhomogeneous Field
~
JO"'
Diffrat ion and
rcO ection FLMT
...
"?:0
155
10 '
10 '
"'"
10 "
10 '
101\
10 11
10 '"
10""
10'"
JO '
- 10 '
3:
nd
2 order Rcfracti on:
...
6" JO '
10 '
•••••••• EGO
Q.,
- - IFLMT.EGOI
JO '
10 "
JO B - - FLMT
10"
-------- EGO
- - IFLMT.EG
lOB
10 "
0
90
Scattering angle
180
~
[deg]
0
90
180
Scattering angle tI; [deg]
Fig. 4.51. Comparison of the dominant scattering orders, reflection, first, se co nd and
third-order refraction, computed using FLMT and EGO plotted together with the absolute deviations between both theories from the case shown in Figs. 4.49 and 4.50
In conclusion, either method provides results which can be considered adequate to analyze optical measurement systems involving light scattering from
particles in inhomogeneous ineident waves.
4.2.3.2 Imaging Properties of a Particle
Depending on where the particle is situated in the incident beam and where the
detector is placed, the incident beam is effectively sampled at the incident points
of each scattering order. For a one-dimensional case this is illustrated in Fig.
4.52.
Each scattering order or each incident point creates a virtual image of the ineident intensity distribution, only visible from the chosen receiver location (Fig.
4.52a). Because of the shaped structure of the beam, the virtual images are separated in space. The larger the distance between the ineident points, the
156
4 Light Scattering from Small Particles
Incidenl Gaussian beam
a
(B)
Receiver
signals:
1= 0
Timel
\
Cenler posilion Itime of Ihe parlicle
Fig. 4.52a-c. Imaging properties of a particle in a one-dimensional shaped beam.
a Dependence on receiver location, b Dependence on scattering order, c Dependence on
particle size
larger the separation between the virtual images. This displacement of virtual
images becomes more distinct as the ratio of partide size to beam diameter increases, Fig. 4.52. In Fig. 4.53 the three-dimensional imaging behavior is visualized for a partide, which creates three virtual images of the incident beam.
Fig. 4.53. Virtual images of a laser beam centered on the z axis bya large particle. The images correspond to three different scattering modes
4.2 Scattering of an Inhomogeneous Field
157
Note that the absolute intensity of the images could be different because of
the different scattering amplitudes of each scattering order.
In the following section the scattered light on the surface of adetector fIxed in
space is computed for particles of various sizes placed with the particle center in
the YoP = 0 plane. In fact, the particle may produce several virtual images of the
laser beam on the detector, depending on its position, the position of the detector and which scattering orders are involved. Computations have been carried
out using FLMT for three different particle sizes.
The optical confIgurations and the results are shown in Fig. 4.54. In Fig. 4.54a
a particle of diameter 1 f..lm is traversed through a beam of 6 f..lm diameter at its
10,
Real laser
beamand
partide motion
10,
/
Plane 01'
parlide motion
c
Real laser beam
c dccay
100
10,
50
/
Di placcd
virtual image
ofthc beam
~~~o
-20
d p = 16lim
20
xo" IjlI111Double pC'dk
from reflection
and refraction
:.L'I
particle motion
Real laser beam
Fig.4.54a-c.Virtual images of laser beam (A b =512nm, d wb =6Jlm) on adetector
( rjJ, = 10 deg, lfI, = 11.3 deg) using an oil drop let of different sizes in wa ter (m = 1.08).
a d p =lJlm, b dp =8Jlm, c d p = 16Jlm
158
4 Light Scattering from Small Particles
waist and the resulting intensity distribution, created by the dominant scattering
order, resembles dosely the intensity distribution existing in the real incident
beam. In this case the scattering could have been computed equaHy weH using a
homogeneous wave approximation, where the amplitude of the homogeneous
wave depends on the position of the partide center.
For a larger partide, dp = 8 )..Lm, the virtual image of the laser beam is displaced towards negative x values and also exhibits a double peak behavior in
space. This becomes even more exaggerated for the largest partide, d p = 16)..Lm,
shown in Fig. 4.54c. For large partides the virtual images created by each of the
scattering orders are separated significantly in space. Indeed, for some geometries, even a single scattering order can produce more than one virtual image,
for instance second-order refraction in backscatter. Notice in Fig. 4.54c that a
large partide positioned at the origin is not even visible to the detector.
Figure 4.55 provides an interpretation of this effect in terms of geometrical
optics. An explanation can be given in terms of the incident points. Each glare
point seen by the detector images the laser beam with a displacement in space,
depending on the partide size. This is in fact equivalent to the time-shift technique (sections 2.3, 5.3.4 and 9.2) applied to each scattering order individually.
For a partide at position 1 in Fig. 4.55, the incident point for the dominant scattering order lies outside a region of significant incident amplitude, whereas for
position 2 the incident point is weH within the bounds of the beam. The double
peak in x direction corresponds to the two dominant scattering orders for this
detector position: reflection and first-order refraction.
The exact position of the incident point depends on the scattering order considered, the partide diameter, the relative refractive index and the detector position (Albrecht et al. 1994, 1996).
Partide
position 2
Particle
p ition 1
Incidcnt point
x
r... (z)
e.
z
Laser bcam
y
Glare point
0-. ep,
elNI'II:
I"
Receiver
Fig. 4.55. Sampling of a laser beam through the ineident interaction point on a particle
surface
4.2 Scattering of an Inhomogeneous Field
159
The position of the interaction points can be determined using methods of
geometrical optics. The amplitude of the scattered field for the particular scattering order N considered is proportional to the field strength amplitude at the
incident point position (see Fig. 4.55)
XOpJ
= [Yop
rop
dp
,
r =p
2
(4.145)
zop
Since the position of the incident point may be very different for different scattering orders, different amplitudes of the incident beam proflle will be imaged
onto the detector.
For a Gaussian laser beam, whose axis is aligned with the z co ordinate, the
intensity at the detector is proportional to (Fig. 3.4, Eqs. (3.30), (3.59))
(4.146)
r
[2(XOP+x(;))2+(YOP+y'nfj
1
r (N) 1+
z-2( ZOP+Z (;))2
exp -
2(-2(
I+Z z op +Z (;))2)
r wb
Rb
(4.147)
Rb
with the beam radius Eq. (3.64).
The coordinates of the particle position at which a maximum intensity is obtained at the detector are designated as
(4.148)
At this location the incident point is situated at the origin of the incident beam,
i.e. at its intensity maximum.
For reflection, the location of the incident and glare points with respect to the
center ofthe particle is given by Eq. (4.68)
(I)
(1)
r (,,1. ) = r e (.',1 ) = r e-e
pr w
p
PI e(1)
pr -e (1)1
w
(4.149)
where rp is the particle radius. For first-order refraction (N = 2), the position of
the incident point is given by Eqs. (4.70) and (4.71)
( ;2)
r'
=r
P
(;2)
e'
=r
(2) (
2 cos 8 ,cos
( 8;-mcos,
8)) e(2)
mepr-m+
w
----'---'----,-----------'----------:p2(cos8; -mcos8,)(m+cos8, (cos8; -mcos8,))
cos8; = 1-
(4.150)
m 2(I-e(2) .e(2))
pr
w
-27(-I-+-m-2-_---'---m-r2=(=I=+=e=~=~=.e=~=2)=)~)
(4.151)
160
4 Light Scattering irom Small Particles
(4.152)
In these expressions e<J') is the local unit vector of the incident wave at the incident point of the scattering order N, e~~) is the unit vector of the scattered wave
from the glare point to the receiver, Bi is the incident angle and B, is the refr ac ted angle.
For the calculation of the amplitude of the scattered field, the vector from the
glare point to the receiver e~~) and the wave vector at the incident point e~N) can
be replaced by the detector orientation vector e pr and the incident beam vector
eb respectively, since the local deviations are extremely small.
For the example of dominant first-order refraction and using the previous example of an oil droplet in water (m = 1.08) the partide position for a maximum
intensity can be obtained from Eqs. (4.148) to (4.152) and for a dp = 16 /ll1l partide as
X max
= 5.4 11m, Ymax = 4.7 11m
,
Z max
= 3.6 11m
(4.153)
This is the location of the center of the partide when the incident point for the
first -order refraction, N = 2, is exactly at the middle of the beam waist. If the
partide is now moved in the plane YoP = 4.7 11m, the virtual image of the laser
beam will appear as though a very small partide is sampling the incident beam
in the y = 0 plane, as illustrated in Fig. 4.56. A direct comparison can be drawn
between Figs. 4.54a and 4.56.
For the condition of Fig. 4.54c, i.e. a partide traversed in the y = 0 plane, the
maximum intensity is obtained for the partide center location
Yop = 0:
x max =
(4.154)
_X(N) ,
Yo,
,/
parlide mOIion
Y = ~.7 ~un
Real lase r bca m
Fig. 4.56. Image oi a laser beam on a detector through an oil droplet in water
(d p =161-1m) with its center in the plane YOP = Ymax = 4.71-lm (Ab =512nm, d wb =6I-lm,
(P, = 10 deg, f/lr = 11.3 deg, ro, = 200 mm, m = 1.08)
4.2 Scattering of an Inhomogeneous Field
161
whieh eorresponds direetly to the maximum of an x-z eross-seetion through the
laser beam. For a 16 11m diameter partide in the y = 0 plane, intensity maxima
for first-order refraetion (N = 2) are obtained for
x max = 5.4 11m,
Ymax
= 0 11m,
zmaxl
= -105.4 11m,
zmax2
=112.6 11m
(4.155)
These values correspond to the position of the peaks shown in Fig. 4.54e. In Fig.
4.57 the eontributions to the total deteeted signals are shown for a partide traversing along a zap = -200 11m trajeetory. The shift ealeulated with the FLMT of
the refraeted part in x direetion agree weH with the ealeulated X max value of
5.4 11m from the EGO. Furthermore, the loeal maxima are seen to be interferenee between first-order refraction and refleetion/diffraetion.
The results presented above demonstrate that either the FLMT or EGO methods are eapable of eomputing the seattered light field of an inhomogeneous ineident wave on a spherieal partiele. Compared with seattering from a plane
wave, the non-uniform intensity and the wavefront eurvature of an ineident
wave lead not only to a displaeement of the virtual beam image away from the
geometrie laser beam loeation (volume displaeement), but also to multiple images, depending on the deteetor position, the seattering order, the size and the
refraetive index of the partide and its trajeetory through the ineident beam.
Obviously these imaging properties have consequenees for laser Doppler and
phase Doppler teehniques. These imaging properties are also the foundation of
several other measurement teehniques. The dual-burst teehnique (seetion 8.2.4)
arranges the optieal eonfiguration of a phase Doppler instrument sueh that partides pass on trajeetories whieh exhibit two virtual images of the incident beam
pair, one for first-order refraetion and one for refleetion. Thus, two phase Dop-
~10
0..'
Total received power
Diffraction and reflection
First -order refraction
Pa rtiele diameter
"
)
Beam diameter
"
)
-20
-10
o
10
Particle center position
20
x op
[flml
Fig. 4.57. Scattered intensity for a oll droplet moving through a laser beam (d p = 16 11m ,
m = 1.08, zop = -200 11m, YoP =0 11m )
162
4 Light Scattering from Small Particles
pIer estimates of size can be obtained in quick sequence as the particle traverses
the volume. This redundancy can be exploited as a size verification or to estimate refractive index.
Also the shift in the intensity maximum can be used as the basis of a sizing
technique known as the volume displacement or time-shift technique (section
9.2). With this method the distance between the intensity maxima of one scattering order and two different receiver locations is size dependent. This distance
is measured by knowing the particle velo city and the time between signal
maxima when a particle traverses a phase Doppler measurement volume.
Single beam/sheet sizing techniques have also exploited this shift of image
maxima (Hess and Wood 1993, Albrecht et al. 1993), as discussed further in section 9.2.
Finally, these imaging properties are also the cause of the "Gaussian beam effect" in classical phase Doppler systems. The FLMT and the EGO computational
methods therefore offer a means to analyze such systems and estimate potential
errors (see section 8.3.1).
4.3 Characteristic Quantities of Light Scattered by Particles
The scattered electric field strength from small particles can be computed using
GO (EGO) or LMT (FLMT) according to Eq. (4.1). For an incident wave linearly
polarized in the x direction and a scattered wave propagating in the radial direction to the receiver, the field strength on a point detector is given by
(4.156)
where Eo is the incident field strength and 11 kr is the decrease of the field
strength due to of the propagating, scattered, spherical wave. The scattering
characteristics of the particle are contained in the scattering function
(4.157)
The scattered intensity at a point detector is then (van de Hulst 1957)
[Sc
E;
)2
[0
(
)2
= EC--2 5sc (.Q
u,,{jJs = - - 2 5sc tJs,{jJ,
(kr)
(4.158)
(kr)
and through integration over the detector surface (see Eqs. (4.5)-(4.9» the total
received power is
PSc =
Jf!sc dA = ~~ Jf 5l
c(
=
~~
Q)dQ
il,
A,
J J5
.JzJ s L1tp~
sc (
tJ" {jJs)2
(4.159)
sin tJs d tJs d{jJs
4.3 Characteristic Quantities ofLight Scattered by Particles
163
(4.160)
where
Qr
is the solid angle of the receiver. The integral scattering function
G( 19" qJ,) =
f f5
sc ( 19"
(4.161)
qJ,)2 sin 19, d 19, dqJs
.1tp s L1t9 s
contains therefore specific scattering characteristics (XM' m) of a particle with
respect to the position (19" qJ" r) and size (A19 s, Aips) of the receiving optics
(see Fig. 4.58).
Since for large particles the scattering characteristics can vary strongly with
trajectory, such an integral scattering function must be used with caution. Only
in the case of d p «d wb can the scattering function be considered independent of
the incident wave characteristics.
In this case the integral function computed for a particle in the middle of the
measurement volume will yield directly the maximum signal amplitude and can
be used for system design. In Fig. 4.59 the integral scattering function for a detector aperture with a receiver angle of rr = 8 deg (see Fig. 4.58) and for a water
droplet in air is shown for the case of various forward and backscatter detector
positions. The scattering function in backscatter is typically 100 times weaker
than for forward scatter.
For larger particles, the maximum signal amplitude will not necessarily occur
for a particle positioned in the center of the measurement volume. To obtain an
indication of maximum signal amplitude, the integral scattering function must
be evaluated for the particle position of maximum scattering intensity.
If absorption is neglected, the total scattered power can be obtained by integrating Eq. (4.160)
(4.162)
z
Fig. 4.58. Receiver position and receiving angle t!,
164
\.:J
4 Light Scattering from Small Particles
1000
- -,.--:..:-:..-..::..
..... - ...
---::
.. ............ . .- . . ,::.-:.:=-_.--_ .
-'-
~
0
..;j
u
~
c2
100
/" ;"""' ... ;'
~
.~
~
:-.. ---
Ir~,/..... , '
CI)
=
'"
-
-'"'
~
.,..
10
I'
/",/ .. )\..,,1
\ I •
... \ I :
'"
:s
....
CI)
'\I"
~,
<U
"
Receiver loeation
tJ, '" 6 deg
tJ, '" 12 deg
tJ, '" 18 deg
tJ, '" 174 deg
0.1
0.01
0
20
10
30
ParticIe diameter dp [flml
Fig. 4.59. Scattering characteristics for water droplets in air for different scattering directions (Ab = 488 nm, d wb = 400 11m,
= 8 deg)
r,
and in analogy to gas discharge (van de Hulst 1981), a scattering cross-section
can be defined
Ppse
ASe
(4.163)
=--
Io
as weH as a normalized scattering efficiency
Ppsc
(4.164)
17sc =-I--2
o 1trp
given with respect to the particle projected area. The surn of absorption and the
scattering cross-section is the extinction cross-section
(4.165)
which for negligible absorption is just equal to the scattering cross-section. By
substituting the actual scattered power at the detector (Eq. (4.160» into Eq.
(4.164), the coHection efficiency can be obtained.
PSc
PSc
17 Seeff = - I - - 2 = 17SC -P
o 1t rp
(4.166)
pSc
Figure 4.60 shows the coHection efficiency for the detector defined in Fig.
4.59. The coHection efficiency is in fact larger for srnaller particles, reaching 10%
for forward scatter configurations.
4.3 Characteristic Quantities ofLight Scattered by Particles
165
Receiver location:
Forward scattering 0, '" 6 deg
0, '" 12 deg
Backward scattering 0, '" 174 deg
I
I,
'
" ..... \. " -
" '" ... _ _________________ _____ ________ _
,
.
,'"' ... " ,
.. ' ,
f
''','
..
\."
',01'
_....... .......... "... ....... "'"
"~~""
..
..' .......... ___ .... ', ................... _... ,r, ..
" .. ,#
105L-i-~-L-L~~~L-~~-L-L~~
o
10
__L-L-~~-L-L-L~~~L-i-~-L-L-L~~
20
30
Particle diameter dp [11m]
Fig. 4.60. Collection efficiency as a function of particle size for different scattering directions (,1 = 488 nm, d wb = 400 /-Lm, y, =8 deg, m = 1.334)
PART 11
MEASUREMENT PRINCIPLES
170
5 Signal Generation in Laser Doppler and Phase Doppler Systems
to the spatially invariant axis of this main coordinate system. The analysis is
presented in a general form, applicable for a Gaussian beam, section 3.1.4.2. In
the case of plane waves, several terms can be omitted.
The illuminated volume is formed by the intersection of two beams, with an
orientation of the wave vectors along the laser beam propagation axis.
= 2rc
k
b
Ab '
(5.1)
b=1,2
The two laser beam axes are mirrored about the y-z plane, in the x-z plane and
the center of the illuminated volume is placed at the origin of the main coordinate system. The position of the laser beam waists can be arbitrarily placed
along the axes of the beams, as seen in Fig. 5.2. The two waists do not coincide
when the system is not weIl aligned.
The laser Doppler or phase Doppler detectors are placed at the position r Or
from the origin of the main coordinate system, at an off-axis angle of f/Jr
(x rotation l ) and at one elevation angle, IfI r , for laser Doppler systems or at two
elevation angles, ±1fI r' for phase Doppler systems (y rotation)
(5.2)
r=1,2
z
Fig. 5.2. Geometry of the laser bcam intersection volume (for the case of poor alignment)
1
The direction of rotation around the x axis for the off-axis is defined mathematical
positive. For illustration, a negative off-axis angle is used in Fig. 5.1.
5.1 The Signal From an Arbitrarily Positioned Detector
171
A signal arising from a particle moving with the velocity v p is to be examined.
Initially, the detectors will be considered as point detectors, meaning that the
scattered light intensity remains constant over a small detector surface M r • The
particle is spherical and has the diameter d p = 2rp and an instantaneous position
rap- The trajectory of the particle is defined by the initial position r pa at time
t = 0 and the velo city vector v p as shown in Fig. 5.3.
(5.3)
The analysis of how the particle images the illuminated volume onto the detector can follow either as a spatial or temporal analysis. The spatial analysis examines the imaging properties of the particle over all possible particle positions,
rap' at a fixed time t. The temporal analysis transforms a three-dimensional trajectory of the particle into a one-dimensional time signal of scattered light intensity.
In either case, the analysis can be characterized by the particle diameter.
• For very small particles (d p «Ab)' real interference fringes are present in the
illuminated volume and this interference structure of the laser beams is sampled through the velo city and the trajectory of the particle (Eq. (5.3». The
scattering properties of the particle reduce to an intensity factor.
• Medium sized particles (d p '" Ab) can be analyzed by scattering theories based
on the Maxwell's equations. In most cases, the incident amplitude distribution over the particle surface can be approximated by a homogeneous wave,
but the phase cannot be assumed constant.
• For large particles (d p »Ab)' the laser Doppler or phase Doppler system can
be analyzed using geometrical optics or Maxwell's equations. Normally, the
intensity and phase changes over the particle surface must be taken into account.
Fig. 5.3. Vector notation for incident and glare points
172
5 Signal Genera tion in Laser Doppler and Phase Doppler Systems
This chapter examines the signal generation according to this particle size
classification (very small or large) in space and time domains.
The analysis begins with the scattered electromagnetic vector on the surface
of one detector, placed at arbitrary angles rp, and If/" Eq. (5.2), with respect to
one laser beam with an arbitrary rotation angle of ~ < 45 deg, Eq. (5.1). For a laser Doppler or phase Doppler detector, which receives the scattered waves from
two beams, the superposition of two scattered waves from two laser beams on
the detector surface is examined. However first some remarks about the scattering order must be made.
For a given detector position rp, and If/ r' the incident points and the glare
points on the surface of the particle are determined by the scattering order, N.
The scattering order can therefore always be considered as one additional independent variable. The following analysis is valid for any scattering order, therefore, the superscript (N) is dispensed with. If one particular scattering order is
dominant (its amplitude is always 10 times larger than all others), then the signal structure can be derived directly from the equations presented below. If
more than one scattering order makes significant contributions to the detected
signal, then a superposition of the electric fields from all contributing scattering
orders on the detector surface must be performed. In such cases, the signal can
then become more complex, e.g. dual or multiple bursts (section 8.2.4).
5.1.1 Fundamental Relations
The notation ofthe vectors related to the particle is given in Fig. 5.3. The vector
r6;) denotes the incident point, (i), on the particle surface of the incident wave b
with respect to receiver r, measured from the center of the particle. The position
of the incident point in the main co ordinate system is given by
(i)
U)
rO,br
=
rop
+ r br
J [ x op + x br(i)J
(;)
= [ YO,b,
(;) = Yo p + Ybr(i)
XO,b,
U)
zO,br
zop
(5.4)
+ Zbr
The radius r~!) refers to the glare point (g) of the incident wave b with respect
to the receiver r, after a number of interactions with the particle surface and
measured from the center of the particle. The position of the glare point in the
main coordinate system is given by
X (g)
o br
r(g)
O,b,
=
r
Op
J [x
+ r(g)
= [ y(g) =
br
O,br
+ x br(g)J
YOp + y(g)
br
op
(g)
zO,br
(5.5)
(g)
zop
+ zbr
The incident wave at the position of the incident point is defined by the vector k~: and the complex amplitude vector ~~:, which can be split into an amplitude factor and a phase factor.
5.1 The Signal Fram an Arbitrarily Positioned Detector
173
(5.6)
For larger particles in inhomogeneous waves, the wavefront curvature may influence the phase of the primary wave at the incident point, as illustrated in
Fig. 5.4. In such cases, the local orientation of the incident wave k~: and the field
strength ~~: may deviate from the values at the waist center k b and ~Ob
The amplitude and phase of the beam at the incident point can be computed
according to Eq. (3.59). However Eq. (3.59) is cast in a beam coordinate system
and therefore a transformation from the main co ordinate system (x, Y, z) to the
coordinates ofthe beam (x b ' Yb' Zb) is necessary
x b =xcosiji'+zsiniji'
Yb
=Y
Zb
=
(5.7)
b=1,2
±x siniji'+ zcosiji' + Ztb
If the system is not perfectly aligned, Ztb expresses the displacement of the beam
waist relative to the intersection point of the two beams, as illustrated in Fig. 5.2.
At the incident point, a Gaussian beam polarized in the Y direction, and neglecting the Z component, has the following magnitude and phase
U) _
Ebr
-
EOb
"i;)
r br
=r
+ (i))2
YO,br
J
= e y EU)br exp(.J If/U))
br '
EU)
_br
r wb
exp[
U)
U)
el - (i) • e/)2
( XO,br
COS /2 +ZO ,br Sin /2
C) 2
rm,br
(5.9)
'
Glare point
.
E Id
••
--'
\
y,br
(r;,br)
Rel:eivcro~
r••
(5.8)
IIr(;}
_ -----............
.
- ...... -
--.
..
..--"" ............
oint
Laserbeam
Beam waist
Fig. 5.4. Vector notation with respect to the laser beam
Phase front at
ineiden. point
174
5 Signal Generation in Laser Doppler and Phase Doppler Systems
t kb
(i) _
lf'br - Wb -
[+
"
BI
Sin
/2
(i)
-XO,br
U)
( XO,br
+
(i)
ZO,br
COS BI
/2 + Ztb
U) • BI)2
(i)
COS BI
/2 + ZO,br sm 12
+ ( YO,br
+
)2]
(5.10)
2R(;)
br
±X~~r sin o/z + Z~~r COSo/z + Ztb
+uctm'
+w
1 ,
r Ob'
lf'Ob
= lf'Y ,Ob
Rb
The beun radius
(i)
(i)
•
BI
U)
BI
1+ ( +
_XO,br Sin 12 + ZO,br COS /2 + Ztb
_
rm,br -
rwb
J2
(5.1l)
1Rb
md the radius of the wavefront
U)
• BI
U)
BI
)2 + 12Rb
(+
-xO,br sin 12 + ZO,br COS 12 + Ztb
±X~,~r sin o/z + Z~,~r COS o/z + Ztb
(5.12)
refer to the local values at the incident point (see Fig. 5.4); however, in many
cases the values for the center of the particle may be adequate.
The above phase expression, Eq. (5.10), may be rearranged using the unit
vector of the beam axes, Eq. (5.l), and the position vector of the incident point
rci:L Eq. (5.4), to yield
(;)
_
lf'br -
wbt -
k b ,rop
'-
-
kbz tb
(;)
(;)
+ lf'ob - k b 'rbr + lf'G,br
/~ "-y---J
"V
Planewave
Particle
Gaussian beam
(5.13)
with
U)
If/G,br
k b • rop = kb(±xOP sin o/z + zop coso/z)
(5.14)
U) sin BI + ZU) COS BI)
k b ,rU)
= kb (+x
br
br
/2
br
/2
(5.15)
( XU) COSBI =+= zU)
O,br
/2
O,br
= -k
sin BI)2 + (y U)
/2
O,br
)2
2R(;)
b
br
+
U)
• BI
(;)
BI
)
_X O br Sin 12 + Zo br COS 12 + Ztb
[
+arctan'
(5.16)
,
1Rb
The first four terms in Eq. (5.13) apply to the case of plme waves propagating
in the direction of the beam axis, describing their time and spatial dependence
and the phase at the origin, lf' Ob' Equation (5.14) corresponds to the phase
change of a plme wave between the origin of the main co ordinate system and
the center of the particle, and kbz tb corresponds to the phase change between the
waist of the beun and the main coordinate system.
5.1 The Signal Fram an Arbitrarily Positioned Detector
175
The fifth term in Eq. (5.13) corresponds to the phase change of a plane wave
between the particle center and the incident point (Eq. (5.15». For very sm all
particles, d p « Ab, this term vanishes. The last term, expressed as \f/~~b" arises
due to wavefront curvature beyond the incident beam waist (Eq. (5.16». For
particles passing remote from the beam waist, this difference arises from the
difference of the wave vector at the incident points and on the beam axis. The
different direction of k~) compared with k b influences only the scattering function (different scattering angle), the phase change due to the wavefront curvature is already included in the term \f/~~b"
In a similar manner, the incident amplitude from Eq. (5.9)
(5.17)
can be split into a spatially constant part from a plane wave EOb ' and a factor
that is due to the Gaussian proflle of the beam
p(i)
G,br
=
r wb
r(i)
m,br
ex [
p
(
(i)
(i)
• 8/)2
(i) )2]
+ ZO,br
Sin /2
+ (YO,br
81 -
XO,br COS 12
(
(i)
rm,br
)2
(5.18)
The particle effectively images the incident field at the ineident point onto the
photodetector. If the scattering plane is not parallel to the polarization of the ineident field (in this case the Y direction), two polarization components on the
detector surface are obtained, corresponding to the two scattering functions ~l
and ~2 in Eq. (4.1).
If the receiver only sees one polarization, for instance by using a polarization
filter in front of it, one polarization component vanishes and the vector equation
for the scattered field reduces to a scalar equation for one polarization component.
On receiver r, the scattered field strength from beam b is then
E (r) -_br
E(r)
br
(r») exp(.JIf/br
-
E(i)
Sbr
[.(
_br ~exp J If/S,br b rp,br
kbrp,br
(g)
nl)]
+ 12
(5.19)
The scattered spherical wave propagates with an amplitude decrease of (kbr;$~tl
and a phase of kbr;$~ + ~. Additionally, an amplitude Sbr and a phase change
If/ S,br due to the scattering is included. The scattering factor Sbr and the phase
If/S,br can be computed using extended geometrical optics (EGO) or Fourier Lorenz-Mie theory (FLMT), and are related to the scattering functions ~l and ~2 of
the particle (see chapter 4).
The detector integrates the intensity of this field strength over the photosensitive surface (see Eqs. (4.6)-(4.9» and performs also a time averaging of frequeneies beyond its cut-offfrequency (see section 3.2.5 and Eqs. (3.183) (3.208».
The intensity must include all scattered fields reaching the detector, in this case
all N ili order contributions, as discussed in section 4.2.1.
For the signal generation on the detector of a laser Doppler or phase Doppler
system, the intensity resulting from the superposition of two scattered waves
(one scattering order) from two different laser beams with different propagation
176
5 Signal Genera don in Laser Doppler and Phase Doppler Systems
vectors (b = 1,2 Eq. (5.1» will be considered. Furthermore, only one polarization
component is assumed in the following discussion. The intensity at the receiver
is then
(5.20)
+ (k I' rl(i)r -
k
(i») + (k 1rp,l
(g)r
2' r 2r
-
k2 r p(g»)]
,2r
and is illustrated in Fig. 5.5.
In this case the illuminated volume has been scanned by a very small particle
in the plane y = o. The scattered intensity of a very small particle located in the
center of the beam waist of one beam is used as the reference intensity in Fig. 5.5
(5.21)
The intensity consists of a direct part Ir,DC and a modulated part, with amplitude
Ir,AC and phase lfJr'
For a well-adjusted laser Doppler or phase Doppler system, some simplifying
assumptions can be made. For the case of a symmetrical optical set-up, the two
beam waist diameters are the same
(5.22)
By using a power meter, the light power of the two beams can be matched
with high accuracy and together with assumption Eq. (5.22), the amplitude of
the electric field in the beam waist is the same for each beam
-2
-I
o
Fig. 5.5. Intensity in the region of the illuminated volume (rwb = 50 f.lID,
Ab = 488nm, d p « Ab)
2
e = 4 deg,
5.1 The Signal From an Arbitrarily Positioned Detector
BOI = BOl = Bo =mOb I
177
(5.23)
The frequency Wb and the wavenumber kb of one beam may differ from the
other. This is the case if frequency shifting or if different colors are being used,
usually for the purpose of resolving the flow direction. In the time independent
terms of Eq. (5.20), the wavenumbers can be assumed to be equal, also for frequency shifted beams.
(5.24)
The variation of the amplitude of the electric field in Eq. (5.19) by moving the
particle throughout the illuminated volume can also be considered negligible.
The scattering function is almost constant, which means that the scattered amplitude is not a function of particle position
d lJI S,br = d lJI S,br = d lJI S,br = 0
dz op
dx op
dyo p
(5.25)
The change of the scattered wave amplitude (not phase) in Eq. (5.19) due to
the propagation of the spherical wave between the glare point and the detector is
basically independent of particle position and glare point position. This is because the distance between the particle and the receiver is much larger than the
illuminated volume and the particle diameter, thus r;1,~ and rpr do not vary significantly with particle position.
1
1
d(kbTpr )
d(kbTpr )
dx op
dyop
kbT~1~ "" kbTpr '
(5.26)
The resulting signal can be interpreted either in time domain or in space. The
description in space is basically an analysis of the imaging of the laser beams
and their illuminated volume by the particle, the time domain description is an
imaging of the spatial description according to the particle trajectory and velocity.
The discussion now turns to the signal generation from very small particles,
d p «Ab' Very small particles follow the flow with little or no slip, therefore this
discussion is particularly relevant for laser Doppler systems.
5.1.2 Signals from Very Small Particles
The intensity given in Eq. (5.20) is the intensity seen by the detector for a specified position of the particle in the illuminated volume of the laser beams. It
comprises several terms, most of them dependent on the particle diameter. For
very small particles (d p «Ab), the following simplifications can be made:
• For very small particles, the incident and the glare points coincide with the
center of the particle. Equations (5.4) and (5.5) reduce to
r(O
O,br
=
r(g)
O,br
=
r
0P ,
rb(ri )
= 0,
r(g)
br
=0
(5.27)
178
5 Signal Generation in Laser Doppler and Phase Doppler Systems
• The beam waist radius and the radius of the wavefront at the incident point
are equal to the values in the partiele center, not dependent on the receiver
position but different for the two beams.
(5.28)
• The influence of the partiele diameter on the phases of the incident fields at
the incident points is negligible. In the vicinity of the partiele, the amplitude
and phase of the laser beams is practically constant. Therefore, the plane
wave assumption over the partiele surface can be made, but for different partiele positions the Gaussian characteristic of the beams from Eqs. (5.16) and
(5.18) must be considered
(5.29)
• Furthermore, the distance between the glare points and the receiver, influencing the amplitude and phase of the scattered wave, is the same for both
scattered waves
r(g)
= r(g)
= rpr = const
p, 1r
p,2r
(5.30)
• The scattering function can be assumed to be independent of scattering angle
for very small partieles (see Fig. 4.13a,b)
51r = 52r = 5 = const ,
lfI S,lr
= lfI S,2r = lfI s = const
(5.31)
5.1.2.1 Spatial Description ofthe Signal (Very Sm all Partie/es).
The intensity Ir and the phase ({Jr given in Eq. (5.20) inelude several terms, all of
which depend on the partiele position in the illuminated volume of the laser
beams. If these terms and their sum are now plotted as a function of the partiele
position (Eq. (5.3», the measurement volume structure will be obtained.
Spatial Description ofthe DC Amplitude (Very Small Partic1es). The above conditions lead to the following expression for the spatial distribution of the DC
part
(5.32)
5.1 The Signal Prom an Arbitrarily Positioned Detector
179
For the condition that the 10cal beam diameter does not vary with particle position, the DC part consists of two Gaussian peaks, with separate maxima when
the particle is centered on the axis of either laser beam (Fig. 5.6)
XDcmax bJ
r DC max.b
= [ Y DCmax,b = Z
[±tan
0
%] ,
(b = 1,2)
(5.33)
1
Z DCmax.b
The superposition of these Gaussian pulses in Eq. (5.32) yields only one local
maximum in the region of the illuminated volume and two separated maxima
on the beam axis for larger Z coordinates, as illustrated in Fig. 5.7. For very
small particles, the positions of the two maxima are given by the transcendental
equation ('rn) = 'm2 = 'm)
- zop tan
. e/ tanh(~
xDCmax -
/2
2 XDCmaxZOp
'm
. e/
Sin /2
e/)
COS /2
,
Yo p
- 0, I
-
Zap
I~.
~ (5.34)
2sm%
· 1
/ " ,IX
-
/
..
0,6
0.4
0,2
0
Izr.ex:
/
..
0,6
0.4
0,2
-2
-I
o
z lmml
2
0
Fig. 5.6. Separated DC parts of the two laser beams and the curves oflocal maximum intensity. The gray levels are relative to the waist intensity of one beam (rw == 50 11m,
B=1deg, Ab=488nm)
180
5 Signal Generation in Laser Doppler and Phase Doppler Systems
Fig. 5.7. Superimposed DC parts ofboth laser beams and the curve oflocal maximum intensity(rw = 50 Ilm, e= 4deg, Ab = 488nm)
For the outer regions, the hyperbolic tangent takes the value of unity and the
positions of the maximum intensity are on the axes of the two laser beams, dependent on zop' The absolute maximum is obtained for r op = 0 at the center of
the intersection region of the beams. The z coordinate for which the maximum
in the intersection region at x op = 0 splits into two separated maxima is given by
rm
Izsplit I="21 sin%
(5.35)
As defined in the next seetion, this position corresponds to half of the measurement volume length for the modulated part of the signal.
The determination of the z location of the particle trajectory in the region of
illuminated volume is therefore only possible by separating the two scattered
waves from the two beams. Note that a small dislocation Ztb of one beam waist
from the other along the beam axes results in no displacement of the DC part
intensity.
Spatial Description of the AC Amplitude (Very Small Particles). In the laser
Doppler and phase Doppler techniques, the AC, or modulated part of the signal
is used for velo city and size measurement. Thus, the AC part effectively defines
the illuminated, measurement and detection volumes of the system. The illuminated volume is defined without any particle in the interseetion area of the laser
beams and corresponds to the e-J intensity decay of the interference structure.
The spatial structure of the AC signal amplitude can be obtained from
Eq. (5.20)
(5.36)
by assuming that the beam diameter is constant in the region of the illuminated
volume rm ) = rm2 = rm = const .
5.1 Thc Signal From an Arbitrarily Positioned Detector
181
The spatial intensity maximum lies at rop = 0, i.e. in the center of the intersecting laser beams. For a very small partiele in the center of the illuminated
volume, the maximum intensity at the detector becomes
1r,Acmax
= C{E o_ S
_)2 = 10Kpr
(5.37)
kbrpr
with the assumption that the system is perfectly aligned (Ztb = 0). 10 is the
maximum incident intensity at the center of the measurement volume; K pr
contains all parameters dependent on the partiele and on the position of the detector. If the boundaries of the measurement volume are arbitrarily set by the
condition
(5.38)
then the volume is defined by
in
( Xop crwos'li)2 +(YrwOp)2 +(Zop srw 'li)2 --1
(Ztb
=0, rm =const=rw )
(5.39)
Equation (5.39) is independent of partiele properties or detector position. It describes an ellipsoid with the axes
a0-~
-
cos'li
b = rw
'0
,
c=~
o
sin 'li
(5.40)
Thus the amplitude of the AC part of the signal effectively defines the measurement volume. For small partieles, this is areal measurement volume because
the volume coincides with the illuminated volume of the laser Doppler system
and is independent of the receiver position. In contrast, for large partieles, the
measurement volume is virtual and the position of the volume will depend on
the receiver position and on the imaging properties of the partiele, i.e. its size
and refractive index, as weIl as on which scattering order is being detected (see
also section 5.2).
The actual volume of the measurement volume is given by
8
3
V=~~
o
3 sine
(5.41)
In Fig. 5.8, the dimensions of the measurement volume are visualized for the
configuration from Figs. 5.5 to 5.7.
The dimensions of the measurement volume remain independent of the partiele diameter, even though large partieles scatter higher intensities, because its
dimensions are all defined relative to the maximum scattered intensity.
However, only signals exceeding some minimum detection intensity 1d will
be registered at the photodetector, thus, the detection volume may not coincide
precisely with the measurement volume. The minimum detectable intensity will
set lower limits for the size of detectable particles and also establishes a relation
182
5 Signal Generation in Laser Doppler and Phase Doppler Systems
2
o
-I
z lmml
2
Fig. 5.8. Intensity of the modulated part relative to the intensity of one beam. The extent
ofthe measurement volume (a o =50.04 11m , bo = 50 11m, Co = 1.43 mm, Va = 0.015 mm 3 ) is
indica ted with a line (rw = 50 11m, e = 4 deg, Ab = 488 nm )
between the detection volume and the measurement volume. The minimum intensity is determined by the sensitivity of the photodetector, which in turn can
be influenced by the intern al electronics. Furthermore, the detection volume will
be dependent on the particle properties and on the position and size of the detector surface (Eq. (5.37». The dimensions of the detection volume can be written as
1 Ir,Acmax
-1
n---,
2
.!.ln Ir,Acmax
bd = b0
Id
2
,
Id
C
d
=c
0
1 Ir ACmax
- 1n - ' - 2
I
(5.42)
d
Sm aller particles lead to smaller detection volumes. Particles resulting in signal intensities less than some acceptance threshold I d are not registered by the
system. It is the detection volume, which governs the signal generation in laser
Doppler and phase Doppler systems.
The particle concentration may be dependent on size, thus the lower limit
imposed by the I d threshold effectively establishes which sub set of particles will
contribute signals. The effective particle concentration can be regulated by adjusting the acceptance threshold of amplitude.
For particle sizing, the detection volume must always be referred back to
some reference volume, for instance the measurement volume. Otherwise computed fluxes and concentrations will depend on the scattering properties of the
particles. If the detection threshold is chosen too high, some sm all particles may
not enter the statistics at all. Figure 5.9 illustrates the detection volume dimensions relative to the measurement volume (Fd = ad I ao = bd Ibo = Cd I co) as a
function of particle size for water droplets in air. For a detection threshold of
Pm;n = Pd = ArId = lO-BW all particles above 0.4 /J.m are registered, while for
Pm;n = Pd = 10-6 W, this lowerlimit rises to 2.2/J.m.
The actual volume of the detection volume is given by
V
d
1 I r,ACmax )~
= V ( -ln
0
2
I
d
(5.43)
5.1 The Signal From an Arbitrarily Positioned Detector
-
-'".
,=0
183
2.5
11
~' 2.0
~
.~
c
.5'"'
"E"
1.5
Ö
>
c
1.0
::l
0
'ü
'-'
<)
.,
"0
0.5
>
'"
<l
0:.:
0.0
8
10
Particle diameter h.lm]
6
2
0
Fig. 5.9. Dimensions of the detection volume relative to the measurement volume as a
function of particle size (Ab = 488 nm, e = 4 deg, m = 1.333, ro, = 300 mm, 1fI, = 0 deg,
q), = 90 deg, 7;. =25 mm)
The deteetion volume may also exhibit additional limits for large particles.
For high scattering intensities, the photodeteetor may go into saturation. If the
ratio of the AC to DC part (modulation depth or visibility) is low, then the signal-to-noise ratio may also be greatly redueed. Thus, the deteetor may no longer
reeognize large particles in the center of the deteetion volume. This situation
arises in laser Doppler systems when large deteetion apertures are usedat angular positions ofhigh loeal scattering intensity, e.g. near the diffraetion peak in
forward seatter or near the rainbow angle (see also seetion 5.1.4).
Spatial Deseription of the Phase and Frequency of the AC Part (Very Small Partides). The diseussion eontinues with the phase of the AC part of the scattered
light in Eq. (5.20). Assuming the eonditions given in Eqs. (5.22)-(5.31) are still
valid, the phase of the eosine function in Eq. (5.20) ean be written as
{(Jr
=(0)2
-O)l)t+(k l -k 2 ) ·r Op + (k1z'l -k2
z,J
(5.44)
+ ('1/ 02 -'l/oJ + ('l/G,2 -'1/G,l)
and deseribes, together with the amplitude of the AC part, the interferenee of the
two waves within the interseetion volume of the laser beams. The spatial frequeney of the interferenee fringes in the x direetion, used for the velocity measurement, ean be ealeulated from Eq. (5.44) using
0)
r
=2nf = dd{(Jr
r
x op
and the interferenee fringe distanee is the inverse of this equation
(5.45)
184
5 Signal Generation in Laser Doppler and Phase Doppler Systems
ÖX = 21t =
O)r
21t[ dcp, )-1
dx op
(5.46)
The individual terms ofEq. (5.44) can be interpreted as follows:
For non-equal frequencies, 0)1 and 0)2' the phase changes linearly with time
and a stationary particle will create a cosine change of intensity. In space, this
can be interpreted as a moving fringe pattern passing over the particle. The frequency of the received oscillations from a stationary particle is identical to the
frequency difference 0)2 - 0)1. This frequency shift can be used for directional
sensitivity or for detection of very small velocities in laser Doppler systems.
The different starting phases, If/ 01 and If/ 02' create a constant offset. If allother
phases are zero (small particle in the center of the measurement volume, no shift
frequency and plane waves), the detector will probably not detect the highest
possible intensily because the interference field is not symmetrically arranged
about the y-z plane. In laser Doppler systems, this difference is caused by the
different optical path lengths of the laser beams from the beam splitter to the
measurement volume.
Near the beam waist, the incident waves are plane and the orientation of the
waves al the incident points on the surface of the particle corresponds to that of
the beam axes (Eq. (5.1). The fourth term in Eq. (5.44) contains the properties
of plane incident waves
(5.47)
The sum and difference of the inverse wavelength appearing in Eq. (5.47), indicates that the symmetry about the y-z plane is broken when the two beams are
of different wavelengths. The interference planes no longer lie parallel to the
y-z plane, but are slightly rotated about the yaxis. However, these effects are
usually so small that a single wavelength can be assumed; Al = A2 = Ab or
kl = k 2 = k b • For instance, the rotation of the interference planes for a system
with a crossing angle of 1 deg, a wavelength of 488 nm and a shift frequency on
one beam of 40 MHz, amounts to one angular second. The second term in Eq.
(5.47) can be set to zero.
The remaining term
(5.48)
can be related to the interference fringe spacing in the real intersection volume.
The interference fringe spacing becomes
Llx=~
2sin%
(5.49)
Equations (5.40) and (5.49) show that within this measurement volume, the
number of interference fringes is
5.1 The Signal From an Arbitrarily Positioned Detector
_
_ 2a o _ 4rw
e/
185
(5.50)
N fr -No - - - - t a n /2
Llx
Ab
independent of the particle size. Small particles about the size of the wavelength
sampie the interferenee pattern as they pass through the interseetion volume
(eompare to Eq. (2.22» and generate a real image as illustrated in Fig. 5.10. The
number of interferenee fringes in this ease is No"" 14.
The last term in Eq. (5.44) deseribes the effeet of eurved wavefronts of a Gaussian beam on the phase of the AC part of the signal. The magnitude of this term
ean be computed using Eq. (5.16), applied to eaeh laser beam at the ineident
points on the particle surfaee. It is important to note that the radius of curvature
is not neeessarily equal for eaeh beam. This term quantifies deviations from the
ideal ease of plane wavefronts in the laser Doppler and phase Doppler teehniques.
To evaluate loeal variations of the spatial frequeney or spaeing of the interferenee fringes, Eqs. (5.45) and (5.46) must be applied to Eq. (5.44). The spatial frequeney in the x direetion is given by
OJ x
t
=2n!x = ddtpr =kb[2sin%-eOS%( :lzl\ - : 2Z 2
x op
Zl
+
Rl
Z2
+
R2
)
(5.51)
-(Xl + X 2 + Yl + Y2 )-(Gl +G2 )]
The fringe spacing ean be expressed as (Miles et al. 1996)
ÖX=2n[ dtpr
dx op
)-1 ~
2sin%
(5.52)
Fig. 5.10. Interference pattern in the measurement volume. The size of the measurement
volume is indicated with a line (I,,~ = I"AC cos(tp), Llx = 7 ~m, No = 14.3, rw = 50 ~m,
e = 4 deg, Ab = 488 nm )
186
5 Signal Generation in Laser Doppler and Phase Doppler Systems
The coordinates of each laser beam, as given by Eq. (5.7), including any waist
translation along the beam axis, must be substituted into Eq. (5.52). In Eq. (5.51)
the wavefront curvatures
(5.53 )
and contributions due to the
~
phase shift in the far field
Gb =_I_-_d_(arctan~J= 1
1Rb
2kb dx op
1Rb
2kb1~b+zi
(5.54)
have been abbreviated. However, to first order these terms can be neglected and
according to Miles et al. (1996) these terms are limited by
1
max( Gb ) = max(Xb ) = max(Yb ) = 21 Rb
(5.55)
and must only be considered for small beam waists.
Fig. 5.11a visualizes interference fringes in the x-z plane, centered on the intersection volume of two laser beams. The spatial frequency of the fringes in the
x direction is shown graphically in Fig. 5.11b. This variation of spatial frequency
can also be illustrated using Moire fringes, as demonstrated in section 5.5. The
relative deviation of the spatial frequency, illustrated in Fig. 5.11 c, and the fringe
separation from the plane wave case can be expressed as
(5.56)
bx Err
"'[2tane/(~12
+
/2
2
ZI
Rl
X 2Z 2
12
Z2 + R2
2
J-1-1]-1
(5.57)
The effect becomes more significant for highly focused beams, in which case
the beam exhibits strong divergence in the vicinity of the beam waist (measurement volume), hence, a strong wavefront curvature. The effect also arises if the
laser beams do not intersect exactly at their beam waists; This effect is often the
limiting accuracy factor for velocity and size measurements using the laser Doppler or phase Doppler techniques.
The curvature of the wavefronts within the measurement volume directly influences the accuracy of the velo city measurement through the spatial frequency
deviations. These deviations are shown as relative frequency error in Figs. 5.12
and 5.13, dependent on the beam waist radius, the intersection half-angle and
dislocation of the beam waist from the center of the intersection volume. Computations have been performed for various detection volumes, ranging from 0.1
to 3 times the measurement volume dimensions (Eq. (5.42». For a given beam
waist radius, the error decreases as the size of the detection volume decreases, as
seen in Fig. 5.12.
5.1 The Signal Prom an Arbitrarily Positioned Detector
187
- 1.0
50
a
cos (c)I , )
0.5
o
o
-0.5
·50
- 1.0
IXI O&
50
15 %
c
/ ,,'
E:1.
><
- 9%
o
6%
3%
0%
z hun)
· 500
500
Fig. 5.11a-c. Influence of wavefront curvature of Gaussian beams to the frequency of interference fringes. The size of the measurement volume is indicated with a line
( rw = 15 /JlIl, = 4 deg, Ab = 488 nm). a Interference field scattered bya very small particle in the x-z plane, b Spatial frequency in the x direction, c Relative frequency error related to plane wave case
e
A decrease of detection volume size can be achieved using slits or pinhole apertures in front of the detector (sections 7.3, 12.2.3 and 14.2.1). For small beam
waists, the wavefront curvature increases, hence, also the frequency error (Fig.
5.12a). By increasing the intersection half-angle, this error can be partially compensated because the measurement volume is decreased in length (z direction).
In Fig. 5.13a,c, both beam waists have been dislocated from the intersection
volume center in the same direction, Ztl = Z'2 resulting in longitudinal distortion
of the fringes. For such a misalignment, as for a perfectly aligned system (Fig.
5.11), the frequency deviation depends primarily on the z coordinate. In Fig.
188
5 Signal Generation in Laser Doppler and Phase Doppler Systems
b
10 -3 L---L...LJL.l..l.Lll1_-'-.L..LJ....U..llL~~--L.JU!U..U
100
10 1
10'
10' 0.1
Beam waist radius rw [fim]
1
Full intersection angle
10
e [deg]
Fig. 5.12a,b. Relative frequency error of a very small particle in the detection volume of a
perfectly aligned system. The dimensions of the detection volume are 0.1, 0.2, 0.5, 1, 2, 3
times the measurement volume dimensions The verticallines mark the value, which was
held constant in the other diagram. a Dependence on be am waist radius (e = 4 deg,
Ab = 488 nm, Zn = Z'2 = 0), b Dependence on fuU in tersection angle (rw = 50 J.tm,
Ab = 488 nm, Zn = Zt2 = 0 )
5.13b,d, the waists have been dislocated in opposite directions, Ztl = -Z'2' resulting in transverse distortion of the fringes. In such cases the frequency deviations are dependent primarily on the x coordinate (see section 5.5).
The relative error increases with increasing bearn waist dislocation. If the detection volume size is assumed to be constant for all dislocations, the error decreases above the Rayleigh length, Fig. 5.13a,b. With increasing Zb' the radius of
curvature of the wavefront increases and for smalilocal regions in the beam, the
wavefronts can be assumed planar. Therefore, the fringe spacing converges for
very large dislocations, Z'b' to the ideal plane wave case, given in Eq. (5.49). This
interpretation is only valid for constant detection volume sizes, e.g. when using
a pinhole in front of the detector.
Without such spatial filters, the beam radius changes with the beam dislocation, Eq. (5.11), and the measurement and detection volume size increases. If
this influence is also considered, then the relative frequency error increases
monotonicallywith bearn waist dislocation (Fig. S.13c,d).
For all dependencies shown in Figs. 5.12 and 5.13, the maximum intensity in
the measurement volume has been assumed the same for all cases, which is not
strictly correct when using a laser with constant power. A further analysis of the
fringe distortion in the measurement volume in terms of parameters of the optical transmitting system is presented in section 7.2.4.
5.1 The Signal From an Arbitrarily Positioned Detector
~
189
15
b
a
c...:;
~
~
0
30
c...:;
t
c...::;
,..,
,..,,..,0
20
>u
Q)
C
Q)
'"
<l::
V'
Q)
Q)
.,;
10
v'"
~
Rb
25
50
75
100 0
Bearn waist dislocation zn = z" [rnrn]
Rb
25
50
75
100
Opposite waist dislocation zn = -zt2 [rnrn]
Fig. 5.13a-d. Relative frequency error of a very small particle (d p -7 0) in the detection
volume for longitudinal and transverse distortion. The dimensions of the detection volurne are Fd =0.2,0.5, 1,2,3 times the measurement volume dimensions (e=4deg,
Ab = 488 nm, rw = 50 ~m). a Dependence on beam waist dislocation for constant detection volume size, b Dependence on opposite dislocation of beam waist for constant deteetion volume size, c Dependence on beam waist dislocation for beam diameter corrected detection volume size, d Dependence on opposite dislocation of beam waist for
beam diameter corrected detection volume size
5.1.2.2 Temporal Description of Signals From Very Sm all Partie/es
For the photodetector, only a description of the signal in time domain is relevant. The spatial and temporal descriptions of the signal arising from sm all partides are related through the trajectory and the velo city of the partide in the
measurement or detection volume, as pictured in Fig. 5.14.
To further analyze the signal generation in time domain, the following assumptions about the partide motion will be made:
190
5 Signal Generation in Laser Doppler and Phase Doppler Systems
y
Fig. 5.14. Signal generation in the detection volume
• The particle velo city is given by v p. The laser Doppler instrument measures
only the velo city component perpendicular to the interference fringes (Fig.
5.14) and the system is usually orientated such that this corresponds to the
main flow direction. This will be assumed to be aligned with the x axis.
• For flows with low levels of turbulence, a cartesian representation of the velocityvector is useful
m=~
z
(5.58)
whereas for highly turbulent flows, a vector in spherical coordinates will be
used (Fig. 5.15)
y
Fig. 5.15. Velocityvector in spherical coordinates
5.1 The Signal From an Arbitrarily Positioned Detector
vx ]
v p = [ vy
Vz
=vp
[s~ntJvc~stpv]
sm tJ sm tp
v
v
191
(5.59)
costJ v
For tp v = 0 and tJ v = 1t /2, the velo city vector has only an x component.
• The particle moves through the volume with a constant velo city, meaning no
changes of direction or variations in speed. The influence of velo city fluctuations during the particle transit through the measurement volume and their
influence on the signal parameter estimation will be addressed in sections
6.5.2 and 8.2.3.
• The reference position used to characterize the particle trajectory is the position within the measurement volume (for small particles) or detection volurne (for larger particles) at which the trajectory of the particle center crosses
the plane x = 0
(5.60)
• The reference time is set to zero (t = 0) at this position. The cartesian description of the particle position rap leads to (Fig. 5.3)
(5.61)
and the description in spherical coordinates yields
(5.62)
Both coordinate systems will be employed, where first the DC part and then
the AC part of the detector signal will be analyzed.
Amplitude of DC Part in Time Domain (Very Small Particles). For very small
particles, the spatial intensity distribution within the measurement volume will
be directly imaged by the motion of the particles onto thephotodetector in time
domain. The DC part consists of two pulses, corresponding to the crossing of the
two laser beams. For a further analysis, it is convenient to assurne that the beams
have identical parameters (Eqs. (5.22) to (5.24» and that the detector is far removed from the scattering center (Eqs. (5.25), (5.26». Furthermore, the assumptions given in Eqs. (5.27) to (5.31) are used. For the DC part the signal is
described by
192
5 Signal Generation in Laser Doppler and Phase Doppler Systems
with
xo p = vxt.
It is also interesting to note the time between the two DC pulses. If the y and z
components of the velo city are non-zero, then both the time at which the signal
maximum is observed and the time between the two pulse-like signals will be
dependent on the particle trajectory. In general, the position of maximum amplitude will occur at
±z tano/z(1+m tano/z)pO
XpDCmaxb
= VJDCmaxb =
2
z
2
2
(m
myypo
cos2o/z
)2
(b = 1,2)
(5.64)
(1+ mz tan o/z) + --y-
coso/z
assuming a constant beam radius for the complete trajectory
(rm *- !(xoP,YoP,zop»). For particle trajectories parallel to the main flow direction x (my = m z = 0), Eq. (5.64) reduces to
XpDCmaxb = V x tDCmaxb = ±zpo tan
O/Z,
(b = 1,2)
(5.65)
in agreement with Eq. (5.33). Interestingly, the time between the DC pulses
L1x DC12 =
xpDCmaxl - xpDCmax2 = vxLltDC12 =
2z pO tan o/z
(5.66)
yields the Z position of the particle trajectory interseetion with the plane x =0, if
the velo city is known. For particle motion parallel to the laser beam plane
( vy = 0), the duration between pulse signals becomes
5.1 The Signal Prom an Arbitrarily Positioned Detector
A.x DC12
=vxL1tDC12
=2z po tan%
1
I-m z tan%
193
(5.67)
For particle motion without a z velocity component, the pulse separation is
given by
A.x DC12
=VxL1tDc12 =2z
po tan%
1
2
(5.68)
1+ ( my )
cos~
The last two expressions are independent of the intersection co ordinate y pO'
The additional term in Eqs. (5.67) and (5.68), compared with Eq. (5.66), represents a first-order error approximation for determining the particle trajectory.
For small deviations from the main flow direction, it can be neglected. The term
in Eq. (5.68) can be measured when using a two-velocity component laser Doppler system aligned to measure directly the x and y velo city components. In this
manner, the estimation of the particle trajectory can be improved.
The error in Eq. (5.67) from the V z component can be reduced by decreasing
the intersection angle. This error vanishes for the limiting case of e = 0 deg. In
comparison, the error in Eq. (5.68) reduces, but is still present for small intersection half angles, as in a laser transit velocimeter.
Within the beam intersection area, the two DC pulses begin to overlap towards the center of the intersection volume until only one maximum is obtained, as illustrated in Fig. 5.7. An analytic expression can no longer be given
for the maxima in this region. The DC part of the signal can be utilized for a
z position estimate of the particle if the two pulses are separated by using different optical properties, such as different polarization for each of the two laser
beams.
Amplitude of AC Part in Time Domain (Very Small Particles). The amplitude of
the modulated part of the signal can be obtained from Eq. (5.36), substituting
the particle trajectory given by Eqs. (5.61) or (5.62)
Ir,Ac
=
t:C[Eo_S_~)2
exp[--;-([xop cos%f + [myxOp + Ypof
kbr r
r
pr
m
m
(5.69)
The maximum modulation amplitude is obtained for the position
X pACmax
=
• 2 BI
myypo+mzzposm
;/2
2+
2 · 2 BI +
2 BI
m
m sm /2 cos /2
y
(5.70)
z
Thus, the position at which this amplitude is obtained depends on the particle
trajectory. For trajectories passing through the origin or parallel to the main
flow direction (x), this position will always lie on the x = 0 plane. Any displace-
194
5 Signal Generation in Laser Doppler and Phase Doppler Systems
ment from this plane will depend linearly on the intersection point at which the
trajectories pierce the measurement volume. This displacement will be smaller
for trajectories eloser to the intersection point of the two beams.
These relations are better understood for turbulent flows using a trajectory
description in spherical coordinates, Eq. (5.62). The trajectory parameters iJ v
and qJv are related to the velo city components through (Fig. 5.15)
iJ v
= arctan
~V2 +v 2
x
y
(5.7l)
Vz
The velo city vector is perpendicular to the projected reference plane, which
itself is rotated in the spherical coordinate system according to the parliele trajectory. This projected reference plane lies in the plane'; = 0 of a rotated cartesian coordinate system (,;, 1],(). The spherical co ordinate system for defining the
partiele trajectory and the reference co ordinate system have the same origin.
The partiele trajectory pierces the projected reference plane at the point
P(1]po,(po) and has at this position the shortest distance to the intersection point
ofthe laser beams (rpo·v p = 0). In the (x,y,z) system, this corresponds to
(5.72)
= 0 and iJ v = rr; /2 (v p = v x), both coordinate systems coincide and
1] pO ----t ypo, (po ----t z pO. By using the coordinates of the intersection point
For qJv
(Eq. (5.72» and the spherical representation of the trajectory direction (Eq.
(5.59», the cartesian coordinates of the trajectory from Eq. (5.3) are given by
(5.73 )
with r=vpt.
The components of Eq. (5.73) will be substituted into Eq. (5.39) to yield the
intersection points of the trajectory with the measurement volume bounds as a
function of the spherical coordinates (r, iJ v' rp v) and the parameters 1] pO and (po.
(5.74)
(5.75)
5.1 The Signal From an Arbitrarily Positioned Detector
195
Cl = -;..( -21] pO sin tp vcostp vsin 1'J v - 2S pO cos 2 tp v sin 1'J v cos 1'J v)
ao
+ :2 (21] pO sintp v costpv sin 1'Jv -
2Spo sin 2tpv sin 1'J v cos 1'J y)
(5.76)
o
+ -;"(Spo sin 1'J vcos 1'J v)
Co
(5.77)
1
72
•
+2~ pO Sill
2.0
U y
-1
Co
The path length of the trajectory in the measurement volume is given by
Llr = 1i - r2 =
_1_~ C; C2
4C 2 CO
(5.78)
For trajectories parallel to the main tlow direction (x direction, 1'J v = 1t /2,
tp v = 0 ) the path length in the measurement volume reduces to
72
Llr =2a
.L
0
2
1-~- 1]po
b2
(5.79)
2
o
Co
The number of periods in the signal results by projecting the trajectory onto
the x-y plane and dividing by the interference spacing
N =2costpvsin1'Jv
v
LIx..jC;
~ C;
4C 2
~ C;
-C =N
0
OV
4C 2
-C
(5.80)
0
N Ov is the maximal number of periods for all trajectories in the respective direction. The square root term gives the dependence on the location of the intersection point.
For Llr = 0 in Eq. (5.78) an equation for the projected reference area will be
obtained
(5.81)
with
(5.82)
196
5 Signal Generation in Laser Doppler and Phase Doppler Systems
(5.83)
(5.84)
Equation (5.81) describes an ellipse in the 1]- ( plane. Because the semi-axes
of this ellipse are not parallel to the 1] and ( axes ( Cry( -:f- 0), a rotated co ordinate
system (~, 1]',(') parallel to the semi-axes is defined. This coordinate system
arises by rotating the (~, 1], 0 system around the ~ axis by the angle ß
2
tan ß =
C -C
(
Cry(
ry
+
[
C -C
(
ry
)
+1
(5.85)
Cry(
and the projected reference area in (1]',(') becomes elliptical with the semi-axes
bovand cOv
(5.86)
(5.87)
Thus, the projected reference area A ov can be obtained as a function of the
partide trajectory direction (Buchhave 1975, Fuchs et al. 1983)
(5.88)
This area is the projected area of the measurement volume seen from a flow
in the direction given by f)v and ({Jv' ao' bo' Co are the dimensions of the measurement volume (Eq. (5.40» and A o is the reference area for a flow in the main
flow direction v p = e x v x and is required in the data processing step for estimating fluxes. The volume of the measurement volume is independent of the partide trajectory.
By replacing the measurement volume dimensions a o' bo and Co with the detection volume dimensions ad , bd and Cd' the same relations are valid for the
detection volume Vd , the detection area A d = rrbdcd and the projected detection
area Adv = rrbdvcdv = AdFAv ' because only the size of the detection volume scales
with partide diameter.
The dependence of the projected reference and detection area dimensions
and the path length on the angles f)v and ({Jv is shown in Fig. 5.16a,b. The influence of ({J v on the projected reference area is by no means negligible.
The dependence of the number of periods in the signal on f) v is shown in
Fig. 5.17a. Flows with a large V z component yield both a small reference area and
5.1 The Signal From an Arbitrarily Positioned Detector
a
::!:
197
b
10 ~~~~~~~~~~~~~~
e
o
Llr
1.0
J, = 90 deg
1-------=---------.::~--__1
.;;;
e
"
E
'6
--- ----------- - -~~~-~~~~~--- - ---­
---
CJ,
COP
"
.~
=45 deg
co
'"
~ 5
---0--
CJ, =30deg
0. 5 <1>---0---0-0---0-...:...0--<""::'-0--0--=4>
Ao• =F
Ao
A,
CJ, = ISdcg
--- ..---... --+---..... _- ..---.. ---.. ---.. - -
----c>--.. -O -
CJ, = Odeg
.. -O---- <>- .... O()..... -
'<) .... -.c> ..... - -Q - -
0.0 L....I......L.....L--'-.L.......L.....L.....L....J1
L.......I.....J......I....J....JL......L...J......I....J
o
45
90
0
45
Trajeclory angle tJ.(deg]
90
Trajcctoryangle 'P, (deg ]
Fig. 5.16. Relative dimensions of the path length and the projected reference area
(19=13deg). aDependence on 13 v (IPv=Odeg), bDependence of FAv on IPv with parameter 13 v
a
b
~90~~~~~~~~~~~-r~
"
~
s.
-;..,,0
.2
0
<::-"-
.4
"2
·0
0-
.6
e
.g 0
v
"~
.8
"
"2
No, ' No - 0.9
1.0
JO
60
90
TrajeclOry angle 11, (degl
-I
o
ln lerseclion poinl
I
Spo' (0 I-I
Fig. 5.17. Relative number of periods in the signal. a Maximum number of periods as a
function of 13 v and IPv «(po = lJpo = 0), b Dependence on the interseetion coordinates (po
and lJpo (13 v =90deg, IPv=Odeg)
a low number of signal periods. For rp v =0 and iJ v = 1t /2, the velo city vector has
only the component v x • In this case Eq. (5.80) reduces to
(5.89)
198
5 Signal Generation in Laser Doppler and Phase Doppler Systems
Thus, the number of periods in the signal is determined by the coordinates at
which the particle pierces the reference area ypo, zpo or 1J po, (po' Figure 5.17b
shows this dependency for various trajectories.
It should be emphasized that the above analysis refers always to the trajectory-dependent measurement volume. Due to the detector amplitude threshold,
there will exist a relation between the measurement volume and the detection
volume as given by Eq. (5.43). Thus, the number of signal periods will also depend on the detection threshold, detector position and the light scattering properties ofthe particle. These dependencies are examined further in section 5.1.6.
Phase of the AC Part in Time Domain (Very Small Particles). The signal phase
in spatial domain is given by Eq. (5.44). By replacing the coordinates of the partide by the time-dependent position of the partide, Eq. (5.61) or (5.62), and with
the approximation, Eq. (5.48), the phase can be expressed as
2sin~
(jJr
= ,dwt+ 21t-,i-vxt+(k 1z'l -k 2 z,J+( Vl"02 -
Vl"0l) +( Vl"G,2
-
Vl"G,I)
(5.90)
b
The frequency ofthe signal can be obtained by the change of phase in time
1
1 d{jJr
Ir = 21t W r= 21t dt
=
(5.91)
2 sin ~
d (
21t +~vx + dt Vl"G,2
ßW
-
Vl"G,1
)
The term ,dwt = (w 2 -wl)t indudes the effect of a frequency shift, arising
from the use of acousto-optic modulators in one or both of the laser beams or
because two lasers with different wavelengths are employed to generate the two
beams.
The second term in Eq. (5.91) gives the influence of the interference field on
the AC part of the signal; the Doppler frequency
2sin~
2sin ~
ID = - , i - vx =-,i-V-L
b
(5.92)
b
which is independent of the partide trajectory and linearly dependent on the
velocity component perpendicular to the interference fringes. This equation
embodies the basic measurement principle of the laser Doppler technique. The
partide trajectory is only reflected in the term (VI" G2 - VI" GI)' which expresses a
spatial dependence of the signal phase (see Fig. 5.1I) anel results in an uncertainty of the frequency estimate.
For ,dW = 0, the detector sees a stationary interference pattern set in the intersection of the two laser beams. The signal with ,dW"# 0 can be interpreted as the
signal obtained from a moving set of interference fringes. In actual measurement systems, the shift frequency is chosen to satisfy I,dWI> WD = 21tID; ,dW> 0
leads to fringe movement in the negative x direction and ,dw< 0 leads to movement in the positive x direction. The measured frequency then corresponds to
the relative velo city of the partide with respect to the interference fringes. Thus,
5.1 The Signal Fram an Arbitrarily Positioned Detector
199
the particle velocity is determined with reference to the velocity L1v
=!shAb I (2sin o/z). Stationary particles result in a signal with frequency !sh'
These relations are illustrated in Fig. 5.18.
For v x > 0, the measured frequency is greater than the shift frequency and for
Vx > 0, the measured frequency lies below !sh' The maximum measurable velocity is therefore determined by the maximum measurable frequency, while allowing for any shift frequency. The minimum frequency which can be processed
determines the minimum measurable velocity or, if frequency shift is being
used, the maximum measurable velo city in the direction of fringe movement. A
stationary particle in the detection volume generates a signal with exactly the
shift frequency, but no DC amplitude modulation. Some processing electronics
may not validate such signals that are not burst-like in character.
a
f
~~-r-~------------~~
0.0
c
~
b
J
J.... +---1---;>('
Y,
Fig. 5.18. Measured frequencies for particles crassing the measurement volume in positive and negative x directions. a Without frequency shift, b With frequency shift
5.1.3 Signals from Large Particles
In section 5.1.2, the signals from very small particles d p «Ab were examined as
a special case of Eq. (5.20) for the laser Doppler measurement technique. For
determining particle size with the phase Doppler technique, it is necessary to
also consider the phase and amplitude changes of the incident light over the
particle surface. The incident and glare point positions are no longer assumed to
be coincident with the center of the particle. Larger particles can be grouped into
two different classes:
200
5 Signal Generation in Laser Doppler and Phase Doppler Systems
• For medium-sized partides, Ab « d p «rwb, the phase change of the incident
wave over the partide surface is not negligible, but the intensity distribution
can be assumed constant. In this case the plane wave assumptions can be
used for calculating the scattered light (see section 4.1).
• For partides large compared to the spatial structure of the incident wave,
rwb ::; d p , the intensity change over the partide surface generates a more complex scattering behavior (see section 4.2).
The following discussion is related to the most general case of large partides.
The plane wave case of medium partides can be easily derived from the resulting equations. The imaging of the incident beams through glare points onto the
detector surface, and the resulting properties of the signal are central issues to
be introduced and discussed in this section.
5.7.3.7 Spatial Description ofSignals from Large Partie/es
The illuminated volume of the intersecting laser beams is the same for small and
large partides. The dimensions and location of the illuminated volume, which
coincide with the measurement volume for small partides, are given by
Eqs. (5.40) and (5.39). The description ofthe measurement volume for large partides in space is basically an analysis of the imaging of the illuminated volume
of the laser beams by the particle. This imaging process results in a virtual
measurement volume which will be displaced from the illuminated volume. The
displacement depends on the partide size, partide refractive index, the scattering order and the detector position.
The basic difference in treating very small partides and large partides is that
for large partides, the distance between the incident and glare points to the
center of the partide can no longer be neglected. The position of the incident
points and the glare points on the partide surface is now related to the partide
position through Eqs. (5.4) and (5.5)
(i)
_
ra,lr -
r(g)
O,lr
rap
(i)
+ r lr
(i)
,
= rOp + r(g)
Ir'
r a,2r = rap
r(g)
0,2r
(i)
+ r 2r
= rOp + r(g)
2r
(5.93)
(5.94)
The analysis continues with a spatial discussion of the DC and AC parts of the
measurement volume for large partides. Again the simplifications given by Eqs.
(5.22) to (5.24) can be used. Furthermore, using the condition r~~:» 2rp , the
change ofthe amplitude (not the phase in Eq. (5.19» on r~~~ is the same for each
scattered wave (Fig. 5.3) and does not vary significantly with partide position
(Eq. (5.26».
The assumption given by Eq. (5(5.25) that the scattering amplitude is not a
function of the partide position, can be used in most cases, but the scattering
function is different for each of the two laser beams because of its complex behavior and large angular variations for large partides, as seen in section 4.2.3.
5.1 The Signal From Arbitrarily Positioned Detector
201
Spatial Description of the Amplitude of the DC Part (Large Particles). The DC
part is simply the addition of the two individual squared field strengths of the laser beams, each exhibiting a Gaussian distribution in all planes parallel to the
X b - Yb plane of the beams.
For large particles this condition leads to the following expression for the DC
part.
I
r,De
( )sm<%
.)2
= Ce Bo rw 2[[ ~ )2 ex ( -2 (()
X;,rl cos<% - Z;,d
[
)
2
k
brpr
(,j
rm,lr
P
(
)2
rm,!r
+ (())2
Y;,rl
U
s)2 ex [ -2 (X U0,r2) COS<%2+ ZU)0,r2 sin <%)2
+ [~
2 +(y0,r2) )2
r(n
rn,Ir
p
(
J
(i)
(i)
rm ,2r
)2
J]
(5.95)
It is important to note that the local radii r~1r (b = 1, 2; r = 1, 2) not only depend
on the partide position, as for very small partides, but also on partide properties and receiver location and can be different for each beam.
For calculation of the intensity maxima, the influence of the local radii variance can be neglected and the position of the two individual maximum intensiti es can be obtained through
_
rVCmax,br -
Xpmax,br
[
Ypmax,br
Zpmax,br
+ tell
an
(+ tel]
an
[
+Z
J
_
-Xbr
(i) -=-Zb!i)
U)
-
Ybr
0
0
1
/2
-
/2
,
b=1,2
(5.96)
For very small partides, the distance between the incident points and the center
of the partide is negligible; the second term remains and this simply describes
the axes ofthe laser beams (Eq. (5.33».
In Fig, 5.19 the line for the position of the maximum DC amplitude is shown
for a very small partide and for a large partide (d p = 70 ~m). The small partide
Fig. 5.19. Generation of a virtual image of one incident beam for a large particle and position of the DC amplitude maximum (bold line) (rw =50flm, 8= 40deg, Ab = 488nm,
1fI, = -30 deg, d p = 70 flm, pure reflection, xl:) = -31.7 flill, z::) = -14.8 flm )
202
5 Signal Generation in Laser Doppler and Phase Doppler Sytems
simply traces out the position of the incident beam (Fig. 5.6), whereas the large
particle sees a line of maximum amplitude displaced by an amount just equal to
the distance between the incident point and the center of the particle xl~). For
large particles, the incident point sampies the laser beam and generates a virtual
image of the beam. Note that also the waist positions of the beams are imaged
differently.
If now the DC amplitude contributions from each beam are combined according to Eq. (5.95), the position of the DC maximum results in a transcendental equation of the form
J
c2 --c
Cl +C2 exp( _2_
2 1- =0
rmb
(5.97)
with
cose/=tz(i)
sin e/
Cb =X(i)
O,br
/2
O,br
/2
,
2
Cb=C b
(i) )2
+ ( YO,br
,
b = 1,2
(5.98)
where the coordinates of the incident points are again related to the particle position through Eq. (5.4).
Two amplitude maxima are obtained far from the intersection of the laser
beams. Only one maximum is found near the intersection area. The lines for the
position of the overall maximum amplitude are drawn in Fig. 5.20 for the case of
a very small particle and a large particle. Additionally, the imaged waist positions are indicated in Fig. 5.20. Even though the system is perfectly aligned, the
imaged waist positions are not coincident. This means that a perfectly aligned
system can be effectively misaligned by large particles (d p > lOd w ) and velocity
measurement errors like in Fig. 5.13 can occur.
-2
o
z lmml
Fig. 5.20. Position of the total DC part for a large partiele (bold line) and a small partiele
(thin line). The images of the beam waist centers are indicated with crosses. The position
of the overall maximum intensity is indicated with a drele. (rw = 50 11m, e = 4 deg,
Ab = 488 nm, 1fI, = 170 deg, 9, = 0 deg, d p = 500 11m, pure reflection)
5.1 The Signal From Arbitrarily Positioned Detector
203
Spatial Description of the Amplitude of the AC Part (Large Particles). The amplitude of the AC part is obtained through multiplication of the scattered field
strengths from the two laser beams and can be expressed by
( XU)
Q,lr
cosel _z(n
/2
0,1r
(
(
sin el)2
+ (yU)
)2
/2
O,lr
(i)
rm,lr
)2
U) Sin
• el)2
X O,2, COS el
/2 + ZO,2,
/2
+ (U)
YO,2r )2]
)2
r
(5.99)
(i)
(
(i)
m ,2r
The posItIOn of the single spatial maximum, obtained by neglecting the
change ofbeam radius with particle position and for the same beam dimensions,
is given by
U)
U)
U)
_X-,-I!.."_+_x-,2"-.r
2
U)
-
Z 2r
2
el
tan i2
YIrU)+y U2r)
XAcmaxJ
r ACmax = [ YACmax =
Z ACmax
+ Z I,
zU)
+ Z(n
Ir
2r
2
(5.100)
2
+
X(n - X(n
Ir
2,
2
cot,:%
2
For very small particles, all terms tend to zero and the maximum amplitude is
found at the center of the beam intersection volume. For larger particles, the position of maximum amplitude moves as illustrated in Fig. 5.21; however, the
movement is linear with the distance of the incident points from the particle
center. Because the light path inside the particle does not change significantly
with particle motion in the illuminated volume for a given receiver position, the
position of the maximum amplitude is linearly dependent on particle diameter
0.5
o
Fig. 5.21. Scattered intensity of lhe modulated (AC) part for a large particle
(d p = 500 jlm). The measurement volume is indicated with a bald line for the large particle and for comparison with a narrowline for a small particle (rw =50jlm, e=4deg,
Ab = 488 nm, lfI, = 170 deg, 11,. = 0 dcg, pure reflection)
204
5 Signal Generation in Laser Doppler and Phase Doppler Sytems
in all three directions. Especially this feature can be exploited for measurement
purposes, using the time-shift technique (section 9.2).
The terms
(5.101)
in Eq. (5.100) describe the center point on the line connecting the incident
points and the values
X =
r
U)
U)
x lr -x 2r
2
=
Z
r
U)
U)
zlr -z2r
(5.102)
2
are the half-distances or half-separation in each of the x and z directions between the incident points. For small intersection angles the separation of the two
incident points is in most cases small compared with the distance from the center of the particle. Furthermore, the position of the overall maximum amplitude
for the AC part corresponds to that of the DC part, as for small particles.
The spatial extent of the measurement volume for a particle seen by the detector can be defined using an intensity threshold given by Eq. (5.38) for the AC
part of the signal. From Eqs. (5.99) and (5.38), the measurement volume can be
defined as
This equation describes an ellipsoid displaced by the amount rAC,max in space.
The major and minor axes are given in Eq. (5.40). The total measurement volurne is given by Eq. (5.41).
If the beam waists are near the origin of the co ordinate system, as is normally
the case for laser Doppler and phase Doppler systems, the local diameter of the
laser beams is nearly the beam waist diameter and rm can be replaced in Eq.
(5.103) by rw •
The displacement of the measurement volume is, in general, a complex function of receiver position (scattering angle), refractive index and order of scattered light, and depends nearly linearlyon the particle diameter. Figure 5.22
shows pictorially the measurement volume displacement for a given detector
position and for two light scattering orders, reflection and first-order refraction.
This displacement is for a specific particle diameter. Because the displacement
depends on scattering order, each scattering order creates its own measurement
volume. Thus, the amplitude of the AC part of the scattered light effectively defines a virtual measurement volume for each scattering order.
For very small particles it will be areal measurement volume because the volurne coincides with the non-displaced illuminated volume (Eq. (5.39» of the laser beams (rAC,max = 0) and is independent of the receiver position, scattering or-
5.1 The Signal Fram Arbitrarily Positioned Detector
205
y
Virtual mcasurcmcnt volume
(e.g. first -order rcfract ion)
ILluminated volum<' from
Virtual mcasuremcnt volume
(e.g. rell <:Iion)
Fig. 5.22. Position of the displaced virtual measurement volumes
der, refraetive index and particle diameter. It ean be understood as an identieal
overlapping of the measurement volumes from all seattering orders due to a
vanishing measurement volume displaeement.
Aecording to the definition ·of the measurement volume size (Eq. (5.38», it is
independent ofwhether the volume is real or virtual and is the same as the illuminated volume of the system. The size is also independent of the particle diameter, even though large particles seatter high er intensities, beeause the dimension is defined relative to the maximum seattered intensity.
As with small particles, a deteetion volume ean be defined as the volume
within whieh the signal from a particle exeeeds a given threshold and, whieh ean
be related to an arbitrarily defined volume given by Eqs. (5.42) and (5.43). This
also provides the relation between deteetion volumes for different particles. Figure 5.23 shows the deteetion volume displaeement for different deteetor positions and for two light seattering orders, refleetion and first-order refraetion.
Although the displaeed measurement volumes for eaeh seattering order are
always the same size, their deteetion volumes ean vary signifieantly, as indieated
in the example shown in Fig. 5.23
Spatial Deseription of the Phase of the AC Part (Large Particles). The phase of
the AC part of the signal from large particles will now be eonsidered. The phase
of the eosine funetion ean be written from Eq. (5.20) as
and deseribes, together with the amplitude of the AC part, the interferenee of the
two waves on the deteetor surfaee. The first to fourth terms in Eq. (5.104) are the
same as for very small particles (Eq. (5.44». The other terms have the following
meanings:
206
5 Signal Generation in Laser Doppler and Phase Doppler Sytems
Time
Position
Receive r ignal
•
x
Virtual delection
volumes
:;::;.~j~jl~!:;li~~~
ßeam 2
e.g. fusl -order
refrac lion
e .g . reil eC'~\'
I
______~~~~~~________~~__________
ßeam I
-+__ ____
~
4-~
=
Fig. 5.23. Position of the displaced detection volumes
The flfth term in Eq. (5.104) represents the optical path-length difference of
the two light beams through the particle from the incident points to the glare
points. This phase will vanish for the reflection mode or for very small particles,
because the incident and glare points coincide. This phase is strongly influenced
by particle diameter and refractive index.
The difference
(5.105)
in Eq. (5.104) includes a phase difference arising from the curvature ofthe particle. For small particles, this phase difference vanishes (rl(;) = ri~) = 0). For large
particles, this phase difference is related to particle size and also represents the
fundamental principle of the phase Doppler technique. The phase shift is proportional to the sum of the x distances of the incident points from the particle
center. Note that for symmetrie incident points (receiver in the y-z plane), both
values have the same amount but different signs and thus, the phase is zero. In
the case of spherical particles, the geometrie relations of the light path through
the particle do not change, only the scaling is linear with the particle size. Thus,
the use of this effect in the phase Doppler technique for the sizing of spherical
particles is easily applied. Because this phase is related to the incident points, it
is different for each scattering order.
The difference
kI rp,l(g)r - k2 r p(g),2r -- kb ((g)
rp,l r -
(g) )
r p ,2r
(5.106)
in Eq. (5.104) gives the phase difference arising due to the path-Iength difference
between the source points of the scattered wave on the particle surface (glare
points) and the detector. This difference also vanishes for small particles
(r~1~ = r~~)r)' For larger particles, the surface curvature leads to an effective path-
5.1 The Signal From Arbitrarily Positioned Detector
207
length difference, so that this term is also important in the phase Doppler technique.
If the receiver is far away from the partide, the value can be calculated from
the glare point positions and the directional unit vector from the partide center
to the receiver
(g)
(g) )-k ((g)
(g»)
-kb ((g)
(g»)
k b ( rp,lr
- rp ,2r f 2r - flr
·e pr
b rp,lr - rp ,2r ·e pr -
(5.107)
The two scattered waves from each pair of glare points create an interference
field, similar to the case of two point sources. This interference field is the origin
of the laser Doppler signals for large partides. The fringe distance decreases
linearly with the glare point separation distance and this distance is also linearly
dependent on the partide diameter. A large partide produces narrow fringes in
space, a small partide produces wide fringes. The phase Doppler technique
measures the angular spatial fringe distance and the partide diameter can be
easily calculated from this quantity. Note that the glare points move and the
phases of the scattered waves change when the position of the receiver is
changed.
All phase terms in Eq. (5.104), except
(5.108)
are, to a first approximation, independent of the partide positlon
f op '
Any
x movement of the partide causes the interference fringes from large partides to
move over the detector surface with the same dependence as for very small partides. Thus, the velo city in the x direction can be determined in the same way.
Using two detectors or two measurements, it is possible to eliminate the partide position x op and to measure the partide-dependent phase of the signal, or
the spatial fringe separation. This is the basic principle of the phase Doppler
technique. Generally, this can be done by forming the difference of two measured phases from two detectors r = 1,2
LI<P12
= <PI - <P 2 = (~S,21 - ~S,l1) - (~S,22 - ~S,12)
U»)
+ (k l ' fl1U) -k 2 ' f21U») - (k(l 'if)
12 -k 2 ' f22
(5.109)
U) + ( ~G,21
U») - (U)
~G,22 -
~G,l1
U»)
~G,12
The determination of these position-independent phasesl for spherical partides, hence the calculation of the phase difference I diameter relation for phase
Doppler systems, will be examined in section 5.3.
I
The symbol cIJ, will be used for the position and time-independent phase of the detected signal, whereas the symbol 'P,. includes temporal and/or spatial dependence of
the phase. Strictly speaking, the influence of the wavefront is not included in cIJ, because it is position dependent but it arises as a measurable phase difference error.
208
5 Signal Generation in Laser Doppler and Phase Doppler Sytems
The last term in Eq. (5.104), appearing also as the last line in Eq. (5.109), is
produced by the phase deviation of the Gaussian bearn from the plane wave
case. This difference carries the spatial frequency error, as discussed in section
5.l.2 for very small particles. Furthermore, an influence on the measured fringe
spacing by the phase Doppler technique is included in this term. The exact determination of this phase error is dependent on the incident point, thus, on the
receiver angle. As an example, the phase difference error
_ (U)
(U)
)
If/G.21 -If/U»)
G.ll If/G.22 -If/U)
G.12
(5.110)
,;jr[) err -
for a 30 ~m particle in a laser beam of 30 ~m diameter is plotted in Fig. 5.24 as a
function of the particle position in the illuminated volume. The optical transmitting configuration is the same as that used in Fig. 5.11 and the receivers are
symmetrically positioned at If/ r = ±2 deg and f/Jr = 30 deg. The measurement
volume for reflection has been considered in Fig. 5.24.
The maximum phase difference error in the reflective measurement volume is
in this case 9.2 deg (8.9%) but changes with the size of the detection volume and
therefore with the detection threshold. The situation gets worse if the transmitting system is not weH aligned, as shown in Fig. 5.2. In Fig. 5.25, the maximum
phase difference error is plotted as function ofbeam waist diameter and particle
diameter for different detection volumes. In Fig. 5.25a the relative phase difference error or relative diameter measurement error is shown for a particle with
the same diameter as the measurement volume or bearn waist. For the same ratio of particle diameter to beam waist the error decreases for larger diameters
and as expected, the error increases for larger detection volume sizes. In Fig.
5.25b the relative error is shown for two different measurement volume diameters as a function of particle size. The absolute phase difference error increases
linearly with particle diameter and, therefore, the relative error is independent
of particle size for a given configuration and a constant detection volume. Again
the error increases for smaller beam waist diameters and larger detection vol-
- 15 dcg
LJ(/Jm
10 dcg
5 deg
o deg
00
Fig. 5.24. Phase difference error in the in tersection area of the laser beams as a function of
particle position for a perfectly aligned system. The displaced measurement volumes of
the two receivers (1jI,=±2deg) are indicated with white lines (rw=15~m, e=4deg,
Ab = 488 nm, d p = 30 ~m, 1jJ, = 30 deg, LllP12 = 103.7 deg, reflection)
5.1 The Signal From Arbitrarily Positioned Detector
a
~102~~~~~~~"Tn~--"rr~
209
b
- - - 20 flm
~"
--- -- 200 flm
'1
-t
10
~'1
_~o __ a~~D __ D __ D __ D __ O_-~_~b
,
I
lO-\L-...l......J....J...LJ.lll.llO--..l...-L.l..w.llllO.LO--......,....l.J-'LJ..llJIOOO I
Waist and particle diameter dp ' d", [flml
10
100
1000
Particle diameter dp [flml
Fig. 5.25a,b. Dependence of relative phase difference error due to Gaussian beam phase
divergence as a function of beam size and particle diameter for different detection volurne sizes (1f/,.=±2deg, 9,=30deg, reflection, Ab =488nm, e=4deg). aDependence
on beam waist diameter for a constant ratio of particle diameter and beam waist diameter
(2rw = d p ), b Dependence on particle diameter for two different beam waist diameters
urne sizes. For a laser or phase Doppler system, the detection threshold is a constant value adjusted for detection of the smallest partide sizes. For larger partides the detection volume increases and for this reason the relative error increases. This effect is indicated in Fig. 5.25b with the thin dashed lines. As an
example, a system with a detection volume of ad = 100 I.,tm (0.5 x 200 !Lm = rw )
capable of detecting l!Lm partides cannot measure partides with 250!Lm with
an error less than 10 % by reflection dominated scattering. By reducing the size
of the detection volume, e.g. by reducing the laser power, the accuracy of the
measurement can be increased for larger partides but the number of small partides detected and, therefore, the signal rate is reduced.
Each of the two receivers generates their own detection volume. The displacement of each of these two detection volumes increases with partide size. A
phase difference measurement is possible only in the overlapping region. The
sharp decrease of the curves in Fig. 5.25b for larger partides indicates that the
detection volumes no longer overlap and a phase difference measurement becomes impossible.
Furthermore, the error of the velocity measurement is influenced by the partide size. As already mentioned in this section and illustrated in Fig. 5.20, the
virtual images of the beam waists are not coincident for a perfectly aligned
(Z'1 = Z'2 = 0) system. Additionally, the measurement volume is displaced. This
results in a misalignment of the system for partides much larger than the beam
waist (d p > lOd w ). In normal laser Doppler or phase Doppler systems this effect
can be neglected but for the time-shift technique, very small beam waists have
advantages.
210
5 Signal Generation in Laser Doppler and Phase Doppler Sytems
Note that all errors depend on scattering order, refractive index and receiver
position and increase rapidly for misaligned systems, as already shown for small
particles in Fig. 5.l3. The phase Doppler user must be aware of this error and
should make a pre-estimation for the system to determine the maximum error
for each diameter.
5.1.3.2 Time Domain Description of Signals from Large Particles
The particle trajectory is given by Eqs. (5.61) and (5.62), together with the related assumptions. The position coordinates of the particle rop can be replaced
by the time-dependent description of the trajectory. The trajectory of the particle deterrnines how the particle-generated, three-dimensional virtual measurement volume is sampled, as discussed in the previous sections.
Time Domain Description of the DC Amplitude (Large Partides). As for very
small particles, the DC signal consists of two pulses. The assumption is made
that the incident beams are identical (Eqs. (5.22) to (5.24» and that the detector
is far from the scattering center (Eq. (5.26». For large particles, the DC signal in
cartesian coordinates is given by Eq. (5.99), replacing the main coordinates of
the incident points by the position of the particle center in terms of trajectory
parameters (Eq. (5.61» and the coordinates of the incident points relative to the
particle center (Eq. (5.4».
(5.111)
The x component of the particle position can be replaced by v J. Of interest is
the time interval between the two separated pulses. For particle trajectories parallel to the main flow direction x, the pulse maxima occur at the particle positions/times
-
t
-- X br(;)+(
(;))t an/
e/
ZpO+Zbr
2
xpDCmax,b-vxDCmax,b-
,
b= 1,2
(5.112)
For very small particles, Eq. (5.112) reduces to (5.65). If the interval between
pulses, the velocity V x and the particle diameter are known, the Z position of the
trajectory intersection with the reference plane can be computed.
If now the y and Z velocity components are non-zero, then the time of the
pulse maxima and the duration between them will be a function of the particle
trajectory. In general, the maxima occur at the positions
b= 1,2
(5.113)
5.1 The Signal Fram Arbitrarily Positioned Detector
211
The difference of these two values is equal to the separation of the pulse
maxima. In the region of the beam interseetion, the DC pulses are additive and
only one amplitude maximum occurs.
Time Domain Description of the AC Amplitude (Large Partides). The amplitude of the AC part of the detector signal can be derived from Eq. (5.99) using
the particle trajectory and the coordinates of the incident points according to
Eq. (5.111).
The particle x position yielding the maximum AC amplitude, under the assumption of a constant beam diameter, is given by
XpACmax
=
For very small particles, the incident points and the glare points converge to
the position of the particle center, thus, Eq. (5.114) reduces to Eq. (5.70). The
time at which the maximum AC signal is obtained depends on the particle trajectory, as for small particles, and on the particle size. By comparing Eq. (5.114)
with Eq. (5.113) it is obvious that the x particle position yielding the maximum
AC amplitude is the mean value of the x particle positions yielding the maximum DC amplitudes for particle trajectories parallel to the x-y plane. Therefore
the particle dependent time shift can be extracted from the AC part alone, the
DC part alone or from the complete signal containing AC and DC part.
For particle motion parallel to the x axis, Eq. (5.114) reduces to
XpACmax
= V x tACmax = -x r + Zr tan %=
x(n
Ir
+ x(n
2
2r
+
ZU) - Z(;)
Ir
2r
2
tan BI
12
(5.115)
whereby the maximum pulse position of the particle signal is now only a function of the position of the incident points. Since these points are linearly related
to the size of the particle for spherical particles, this affords a further method of
particle sizing. This technique is known as the time-shift technique and will be
discussed further in seetion 5.3.4.
The position of maximum amplitude in Eq. (5.115) is related to the x = 0
plane. In practice this reference position can be determined by positioning a
detector in this plane x = o. Such adetector will receive the maximum AC amplitude when the particle is at position x op = O. Generally, any other receiver 10cation outside of the x = 0 plane can be used, so the time difference between the
two signals from the two detectors can be used for particle diameter determination
Llx 12
= -vx LltI2 = xpACmax,I =.!.[-x(n
_
2
11
x U) + x(n
21
12
xpACmax,2
= -Xl + X2 +(ZI - zJtan %
+ x(n
+ (Z(i)
_
22
11
ZU) - z(n
21
12
+ ZU))
tan BI]
22
12
(5.116)
212
5 Signal Generation in Laser Doppler and Phase Doppler Sytems
Important to note is that the velo city of the particle1 must be known for determining the particle diameter using the time-shift technique.
By comparing Eq. (5.109) and (5.116), the difference ofthe phase Doppler and
time-shift technique is seen clearly.
• The phase Doppler technique measures the spatial interference fringe separation or the distance between glare points on the particle surface through
phase difference measurement. These fringes are generated by scattered
waves originating from the glare points and influenced by the path-Iength
differences.
• The time-shift technique measures only the incident point separation by using the inhomogeneous amplitude of the incident wave. The positions of the
incident points are related to the receiver position and depend on the ray
paths. For plane waves, the time shift cannot be defined, because the incident
waves have no local maxima.
Knowing the velo city V x of the particle and the time shift of the bursts, the
spatial displacements of the signal maxima can be derived. If the second and
third velo city components, v py and v pz ' are measured with a two or threevelo city component system, the other terms in Eq. (5.114) can be determined.
Therefore, the time-shift technique can be used to determine the particle size
but the system must be adapted to the respective measurement conditions (see
sections 5.3.4 and 9.2).
For more general trajectories in a turbulent flow, the position of the shifted
signal maximum is given by Eq. (5.99), together with Eqs. (5.4) and (5.73). Using
the equation for the displaced measurement volume ellipsoid (Eq. (5.103)), the
points at which the particle pierces the reference area of the displaced detection
volume for arbitrary trajectories is given with Eq. (5.72) direct1y by
-"po sinlPv - (po coslPv sin tJ v + XPAcmaxj
[
rpACmax = v pt = "po coslPv - (po sin lPv sin tJ v + YpACmax
(po sin tJ v
(5.117)
+ Z pACmax
The difference to the analysis for very small particles in section 5.1.2.2 is, that
all volumes, planes and areas are displaced in absolute coordinates by the measurement volume displacement and thus, can be spatially separated for different
scattering orders and receiver locations. The relative relations and sizes, e.g. reference and detection area size and number of periods, do not change. Therefore
all relations are still valid for large particles and can be used for system configuration.
I
The factor for converting the spatial signal displacement to the temporal time shift is
the negative particle velo city. The negative sign is introduced so that the phase difference in the phase Doppler method and the time shift in the time-shift technique have
the same slope with particle diameter for the same scattering order. The definition is
given later in seetions 5.3.
5.1 The Signal Fram Arbitrarily Positioned Detector
213
Time Domain Description of the AC Part Phase (Large Partides). The phase of
the AC signal part follows directly from Eq. (5.104), by substituting for the partide position coordinates Eq. (5.61) or Eq. (5.62). Again, two identicallaser beams
and a rather distant position of the detector has been assumed.
The first four contributions to the detector phase for small particles have already been discussed in detail in section 5.1.2. The second term contains the
Doppler frequency, Eq. (5.92). The 5th to Sth terms are dependent, to a first approximation, only on the detector position, particle medium and particle diameter and can be assumed constant over the entire intersection area of the laserbeams.
The fifth term, IJI S,2r -IJI S,lr' contains the phase shift within the particle for
different orders of refracted light. This term is dependent on the particle size,
particle medium and also on the scattering order being detected. This term is the
basis for particle size measurements and for the determination of the refractive
index.
The sixth term, k l • ri;) - k 2 . ri~), contains the phase difference between the ineident waves at the ineident points on the particle surface. This contribution is
directly related to the surface curvature near the incident points.
The seventh term, k b (r~~: - r~:,),), contains the phase difference of the two
scattered waves between the particle surface and the detector, and is dependent
on the local surface curvature near the glare points and on the scattering order
being detected. This term can be computed knowing the detector position and
the position of the glare points on the particle, kb (ri~: - r~§),) "" kb (rif) - r\\g»· ep,'
The scattered waves from the glare points create the spatial interference field. As
analyzed in the spatial description of the phase for large particles, the measurement of the fringe distance is the basis of phase Doppler technique.
The last term in Eq. (5.104) contains the effect of the phase curvature of the
ineident beams for the case of Gaussian beams. The complete contribution of
the Gaussian beam cannot be reduced only to this term, but it gives a good approximation. In the case of curved wavefronts, the local wave vector and the 10cal propagation direction of the ineident wave is changed. This influences the
ineident angle of the wave, hence, the ray path inside the particle. Based on
geometrical optics, this means that the ineident and glare points move slightly
when the particle moves. These more complex relations can be analyzed by extended geometrical optics (section 4.2.1) or Fourier Lorenz-Mie theory (section
4.2.2).
The total contribution dependent on the particle properties amounts to
(5.llS)
This is expressed independent of particle shape, but is of course the basis of the
phase Doppler technique for spherical particles. The connection to particle medium and shape is discussed in sections 5.3, 5.4 and chapter s.
214
5 Signal Generation in Laser Doppler and Phase Doppler Sytems
5.1.4 VisibHity of the Signal
After examining the behavior of the DC and AC parts of the Doppler signal for
small and large particles, it is now possible to turn to their relative magnitudes,
known as the signal visibility or modulation depth (Eq. (3.89». The modulation
depth is a function of the trajectory and the position of the particle trajectory,
the particle scattering properties, and the aperture size and position of the receiver. Therefore, a correct analysis requires that the signal be obtained by integrating the two interfering scattered fields (Eq. (5.20» over the surface of the
detector.
For the two beams b = 1, 2, the scattered intensities at a point on the detector
surface, I lr and I 2r , can be found from Eq. (5.20).
r
Ir = I lr + I 2r + 2~ I l,[2r cos( OJ,t+ lPr)
(5.119)
If these intensities are now replaced by the local intensity of each of the incident
points Il~) and Ii;; times a scattering function 51r and 52r (see section 4.3), the
dependence on the trajectory and the particle properties can be separated.
(5.120)
The modulation depth r, after integration over the receiver aperture and
with the assumption of an angular independent scattering function, can then be
approximated as (Adrian and Orloff 1977)
('); I ()'r 5 5
2 11
2 1r 2r
r - rr 1(°5 2 + 1(°5 2
_
Ir
Ir
Ir
2r
U) (52 + 52 )
I IrU)I 2r
Ir
2r
52) (IU)52 + IU)52 )
251r 52r
= rr (52Ir +
2r
Ir
Ir
2r
2r
(5.121)
= rr (52 +52 )
Ir
r
2r
The first factor r in Eq. (5.121) contains the integration over the receiver aperture and the position of the receiver; the second factor p contains the dependence on particle properties; whereas the third factor v is trajectory and
position dependent and embodies the capability of the incident waves to interfere.
r
r
(5.122)
5.1 The Signal From Arbitrarily Positioned Detector
215
The influence of the partide trajectory on the modulation depth, given by
is now examined.
Equal intensities at the incident points, e.g. at the center of the measurement
volume 1\;) = n;/ =10 , yields a modulation depth dependent only on the seattering and the receiver properties
(5.123)
Yv =1,
If the two incident points are dose together (ri;) "" ri;), e.g. for sm all intersection angles, the ratio of the intensities is given by
(5.124)
and for very small partides
(5.125)
r
The dependence of v on partide position (x op Ja o) is shown in Fig. 5.26a für
very small partides. The parameters used are zop JCo and the scattering funetions assumed equal S2 r = SIr.
There is no dependence of the trajectory-dependent modulation depth on Y op
for very small partides, since the intensity ratio is constant for a plane perpendicular to the intersection plane, YoP = o. In the plane x op = 0 and zop = 0, the
b
a
""" 1.0 ................t+:~~~!'e:jl:+"-............
.<:
C.
"c;
"0
.2
'"
:;
"0
o
~ 0.5
-0.5
1.0
0.0
0.5
Parlicle pos ilion x. p I a. I-1
- 180
· 90
0
90
18C
TrajeclOry direclio n !?, Idegl
Fig. 5.26a,b. Trajectory dependent modulation depth y v for very small partides
(5],. =5" .). aAs function of partide position xo p for different trajectories z OP (YoP =0),
b Expected modulation depths inside the measurement volume as a function of the trajectory direction (qJv = 0 deg)
216
5 Signal Generation in Laser Doppler and Phase Doppler Sytems
modulation depth is also not dependent on particle position. Allother trajectories lead to a decrease of modulation depth towards the outer edges of the measurement volume. The influence of particle trajectory on modulation depth is
shown in Fig. 5.26b for the case of Yop = 0 (qJv = 0 deg). At the signal maximum,
all modulation depths inside the shaded region can be expected for the corresponding trajectory directions piercing the measurement volume.
Figure 5.27 shows the detector signals for a very small particle and two particle trajectories v p = e x vpx ' near and far from the center of the measurement volurne. Figs. 5.27a-c and 5.27d-f each show the DC part, the AC part and the total
signal.
The modulation depth corresponds closely with the signal-to-noise ratio
(SNR). A low modulation depth leads to a low SNR. A significant variation of the
signal quality (SNR) is observed, dependent on trajectory. Because of this it is
favourable for the signal processing to identify and operate on the central portions of the signal.
-
;;: 1.0
a
"
",,'"
<lJ
]
i.
0.5
S
<
0.0
-
",,0
1
b
e
c
f
"
",,"'
<lJ
:9 0
~
S
<
-1
-
2
",,0
""
:9
"
<lJ
:&S 1
<
-2
-1
0
1
2 -2
Particle position x op I a o [-]
-1
0
1
2
Particle position x Op I ao [-]
Fig. 5.27a-f. Detector signals and their corresponding DC and AC parts for two different
particle trajectories (v p = ex VPX> 5h = 52'.)' a-c rpo = (0, O.lbo, O.lcoY, d-f rpo = (0, 0.2bo, 0.7 coY
5.1 The Signal From Arbitrarily Positioned Detector
217
Also the scattering characteristics of the particle influence the trajectory dependent modulation depth of the signal. If the scattering functions SIr and S2r
are not equal, the modulation decreases in the center of the measurement volurne and increases at the outer regions. Therefore, the maximum signal amplitude does not necessarily correspond to the maximum modulation depth.
A further decrease of modulation depth is due to the factor
(5.126)
In scattering regions where the incident points are not spatially separated, e.g.
diffraction in forward scatter or for very rough particles, and for large apertures
and large particles, an early analysis by Farmer (1972) can be used to approximate P' According to this approximation the size dependence of the modulation depth is given by the Bessel function of first order
r
(5.127)
In this analysis the entire particle cross-section contributes to the signal generation, hence it is only valid for the near forward direction with separated incident
and glare points, large detector apertures and small intersection angles.
Bachalo (1980) gave a more rigorous analysis of the visibility by numerical
integration ofthe scattering function over the aperture ofthe receiver and Semidetnov (1983) derived an analytic approximation for dominant reflected and
refracted light. He assumed the dominance of one scattering order and a constant interference fringe distance L\X(N) over the aperture. For circular apertures
his integration of the fringe system over the aperture results in a Bessel function.
(5.128)
r
where R is the full receiver aperture angle. Z(N) is the normalized mean angular
fringe spacing of the scattered light, relative to the particle diameter d p and the
interference fringe spacing in the measurement volume Llx and is given by
Z(N)
=~
fJ
Llx
.0,
2n
roIgrad( cP;N) (lf/r' ~r' ro»)1
dil
(5.129)
r
where il r is the solid angle of the receiver aperture. The normalized mean fringe
spacing of the scattered light Z(N) can be calculated by using the relation of
geometrical optics and is independent of the interference fringe spacing of the
illuminated volume and particle diameter. A Lorenz-Mie computation of the
218
5 Signal Generation in Laser Doppler and Phase Doppler Sytems
modulation depth and a comparison with Eqs. (5.127) and (5.128) are shown in
Fig. 5.28a for water droplets in air and a receiver position of t/Jr = 30 deg. Indeed,
certain diameters yield a modulation depth of zero. This relation is only of practical use for particle sizing when the SNR is quite high or when a single scattering mode dominates.
In Fig. 5.28b the modulation depth is shown for circular and rectangular apertures located on the optical axis. The modulation depth decreases rapidly with
increasing particle diameter for the circular aperture. On the outer edges of the
aperture the diffraction from the respective beams dominates. In these regions
the scattered intensity from one beam is very high (diffraction) and from the
other much smaller (reflection and refraction). Therefore, nearly no interference
at the outer parts of the aperture occurs and the modulation is very low. In the
central part of the aperture the scattered intensities of the two beams are equal
and the modulation is high with low intensity. Integrating the intensity over the
aperture results in a low modulation of the detected signal. This effect is important for aperture positions at which the scattered intensity exhibits strong spatial
variations, e.g. diffraction in forward scattering or at the rainbow angle.
The modulation can be increased when the scattered intensities of the two
beams are comparable over the complete aperture. By using a small rectangular
aperture in the y direction in forward scatter, the modulation increases dramatically, as illustrated in Fig. 5.28b. The overall signal amplitude decreases, but the
SNR can be improved significantly. For larger apertures, receiver locations displaced from the optical axis can be chosen, where a constant intensity appears
(see section 4.1.3)
b
a
,
e:: 1.0
,
.<::
P..
~
c::
-------- Pure reflection
,
,
,
,
·ß
..,,
···,
·.
First-order refraction:
- - Lorenz-Mie
- - Approximation
by Semidetnov
,
:g'"
o
~ 0.5
Lorenz-Mie
Pure reflection
and diffraction
Approximation by Farmer
Rectangular aperture
..
.
0.0
,, ,,
I-L...l....1...J...J--'-L..J...:'''-'-.L.J...J...JI>4...:,,",,-.J....l...J.....l...L.;.>...t.:.I
o
100
200
Particle diameter dp [11m]
o
50
100
150
Particle diameter dp [11m]
Fig. 5.28a,b. Particle size dependence of modulation depth for water droplets in air
(A b =488nm, e=4deg, r,=300mm, Vlr=Odeg). aReeeiver loeation 9r=30deg and
circular aperture (R,. = 10 mm), b Receiver loeation 9, = 0 deg and cireular (R,. = 10 mm)
and rectangular (R x = 0.125 mm, Ry = 10 mm) aperture
5.1 The Signal From Arbitrarily Positioned Detector
219
5.1.5 Shift Frequency Influence
In section 5.1.2.2 it has been shown that the number of periods in a Doppler signal depends on the particle trajectory through the measurement volume. Indeed,
in turbulent flows, in which the particle may have a very low velocity in the
x direction, even the maximum possible number of periods will depend on the
particle trajectory (Eq. (5.80». To facilitate measurements of particles with low
velocities in the x direction, or particles passing through the peripheral region of
the measurement volume, frequency shifting has been introduced, i.e. the use of
laser beams with two different wavelengths. In principle two lasers with different
wavelengths can be employed, however, the use of one or two Bragg cells is more
common (Durst et al. 1976, 1981).
Introducing a frequency difference between the two beams leads to a moving
interference pauern. For instance, if beam 1 is shifted by the frequency !sh' the
resulting signal modulation frequency is given by Eq. (5.91) as
(5.130)
For Vx > 0 (!D > 0), the generated signal has a modulation frequency lying above
!sh' whereas for V x < 0 UD< 0), the signal frequency lies below !sh. A stationary
particle yields a signal frequency of exactly !sh.
For some signal processing algorithms, the estimation of the signal frequency
requires a minimum number of signal periods, N m;n. Thus, the choice of frequency shift can influence the size of the detection volume. For a stationary interference field, the detection area is a function of the flow direction (rp v' 13 v> as
given by Eq. (5.88) for an arbitrary flow direction. Using the minimum number
of required periods N m;n' the Doppler frequency !D and the frequency shift !sh
given by Eq. (5.130), the trajectory and period dependent projected reference
area is
A OvN (N m;n'!D'lPv' 19)
Ao
(5.131)
The projected detection area can, therefore, be approximated as a function of
the Doppler frequency (Fuchs et al. 1983)
(5.132)
where C2 and FAV are defined in Eqs. (5.75) and (5.88). The projected detection
area depends on both the particle trajectory through the measurement volume
and on the chosen shift frequency. This is also true for the maximum possible
number of signal periods. For arbitrary trajectories, the number of signal periods is given by Eq. (5.80). If N ov is replaced by the maximum number of signal
220
5 Signal Generation in Laser Doppler and Phase Doppler Sytems
periods using a shift frequency, then an expression is obtained for the maximum
number of periods for an arbitrary flow direction and with frequency shifting
N oV'h(f'h' rp v' 1'J J
(5.133)
No
Both the detection area and the maximum number of signal periods are related to the shift frequency through the factor
(5.134)
Figure 5.29 illustrates the magnitude of this factor as a function of the ratio of
Doppler frequency to shift frequency. From Fig. 5.29 it is apparent that for a finite shift frequency and for JD = 0, the number of signal periods becomes infinite N ---7 00 , i.e. for a stationary particle, the modulation amplitude remains
constant in time. For an increasing Doppler frequency, the number of signal periods decreases, reaching an asymptotic limit of N ov for JD» J'h. This also corresponds to the case of a stationary interference field, i.e. no shift.
If the particle and the interference pattern move in the same direction, then
the case of zero signal periods arises when the velo city of each are the same. For
JD «J'h' the N ov asymptote is again achieved, albeit no longer with directional
-4
-2
o
2
4
Doppler frequency in relation to shift frequency
Fig. 5.29. Shift frequency influence factor as a function of the ra tio
JD I J,,,
Iv I !,h [-]
5.1 The Signal Prom Arbitrarily Positioned Detector
221
sensitivity. Fig. 5.29 is a helpful aid for recognizing the allowable measurement
range for a given shift frequency or choosing suitable f:tlter limits for the signal
(Tropea 1985).
Ifthe minimum number of signal periods is also to be maintained for a partide passing the measurement volume off-center, then the maximum number of
periods must be chosen 20% .. .30% high er. Furthermore, for trajectories defined
by the angle f) v and rp v' a further increase is necessary. For instance, for
f)v = 30 deg and rpv = 30 deg, a factor 2.3 must be applied to the maximum number of periods in the center of the volume. Altogether therefore, the measurement volume must be designed for (2.8 .. .3.0)N O. According to Fig. 5.29, a usable
range of -O.3::;!D I !sh ::; 1.35 results. As an example, if the shift frequency is
10 MHz, then the measurement range of Doppler frequencies is
-300 kHz::;!D ::; 13.5 MHz. This gives directly the measurement range in velocity. The appropriate range for high and low-pass filters is given by
9.7 MHz::;! ::;23.5 MHz.
5.1.6 Measurement and Detection Volumes
Signal detection is accomplished at the signal processing stage and the method
used for signal detection will influence the dimensions of the detection volume.
The signal detection can be based, for instance, on an amplitude level chosen
above the background noise level and/or on a test of periodicity, either in time
domain or frequency domain. In either case, this influences the dimensions of
the detection volume.
The e- 2 decay of the modulation amplitude was chosen rather arbitrarily to
define the dimensions of the rneasurernent volurne. For equal flow conditions
therefore, all partides exhibit the same measurement volume.
For very small partides, the measurement volume is identical to the illuminated volume at the intersection of the beams, Eq. (5.39)-(5.41). For large partides, the measurement volume becomes virtual, equal in size to the illuminated
volume but displaced in position by an amount dependent on the scattering
properties of the partide and on the detector position (Eqs. (5.103), (5.100), Fig.
5.22).
The volume from which signals are received is designated the detection volurne, which can differ from the measurement volume. The detection volume is
defined largely by the requirements placed on the signal and can be either
smaller or larger than the measurement volume. The signal amplitude at the
detector is influenced directly by the scattering properties of the partide: partide size, partide material, and by the properties of the intersection volume. With
a detection using signal amplitude for instance, only partides exceeding a certain minimum diameter will be detected. The detection volume may vary significantly for different partide populations depending on any further validation requirements placed on the signal.
For a given flow direction, the partides effectively see the projection of the
measurement and detection volume perpendicular to the trajectory direction, as
222
5 Signal Generation in Laser Doppler and Phase Doppler Sytems
given in Eqs. (5.78)-(5.84). These areas are called projected reference area and
projected detection area respectively. For particle trajectories in the main flow
direction (v y = V z = 0) the dimensions and position of the projected reference
and projected detection area are identical to the detection area (Eq. (5.42)) and
the reference area (Eq. (5.40)). For concentration and flux measurements the
reference area is used to relate all samples to the same value.
The various requirements and influences are discussed in the following sections
5.7.6.7 Influence of an Amplitude Threshold
For some arbitrary threshold voltage Ud' or threshold current id through a given
resistance, the detection volume is defined by the minimum intensity I d required to reach the threshold. For Eq. (5.103), this condition can be expressed as
!
2
ln( uACmax (dp)) =! ln(iAcma::(dp )) =! ln( I ACm"" (d p))
~
2
=(
~
xop -a:Acmax
J
2
~
+ (Yop - ~AC max
J -2 J
(5.l35)
+ ( Zop
cmax
UAcmax(dp)' iAcmax(dp) or IACmax(dp) are the maximum voltage, current or intensity achieved for a particle with a given diameter d p positioned at the center of
the measurement volume. 1 The following analysis is based on the intensity of the
signal. All amplitudes are therefore related to intensities. Alternatively, signal
current or signal voltage can be used by exchanging the corresponding variables.
The dimensions of the detection volume can be related to ao' bo and co' Eq.
(5.40), as follows
(5.l36)
where bd and Cd are the dimensions of the detection area A d for particle trajectories parallel to the x axis. The detection area is the cross-sectional area within
the detection ellipsoid, on which the particle generates the maximum signal for a
velo city vector in the x direction (see Fig. 5.30) and is given by
A d =Ad(dp)=nbacd = nboco ln(IAcmax(dp))= Ao ln(IAcmax(dp))
2
Ia
2
Id
(5.l37)
Ao = nboco is the corresponding area, the reference area, within the measurement volume.
1
All quantities connected with the detection volume, e.g. A d , ad , bd , Cd' UACmax' ete., are
particle size dependent. This ean be indicated explicitly as f(d p ). Nevertheless, the
subscript d indicates the particle size dependenee implicitly (I d is one exeeption).
5.1 The Signal Fram Arbitrarily Positioned Detector
223
Since the scattered intensity I ACmax (d p ) is directly proportional to the integral
scattering function G(d p ) (Eq. (4.161), the threshold intensity I d also determines the smallest detectable particle in an ensemble of polydispersed particles.
5.1.6.2 Influence of a Minimum Number of Periods
If a minimum number of signal periods N min is chosen to validate signals, then
the measurement volume is reduced in the x direction according to
aON
N.
= ao----12:!!!1..
(5.138)
No
The other dimensions are obtained using Eqs. (5.39) or (5.103) and (5.138) as
(5.139)
No is the maximum possible number of periods in the measurement volume
(Eq. (5.50», without including the influence of a shift frequency, i.e. for stationary fringes. The same relations are valid for the detection volume by replacing
a o ' bo and Co by a d , bd and Cd. The detection area is then defined by
(5.140)
which is a special case of Eq. (5.132) for particle trajectories in the main flow direction.
5.1.6.3 Influence of Partic/e Density Distribution
Already in section 5.1.2.2 it was shown that the projected detection area A dv and
the projected reference area A ov are trajectory dependent (Eq. (5.88». A relation
to the reference area of the measurement volume Ao is now given. In practice,
several of the above influences may be present and should be considered for the
system layout, especially with respect to the signal rate.
The main measurement result of a phase Doppler system is a particle size
distribution N pd = Np (d p ), collected over a time interval Llt. Together with the
frequency measurement, both the size and velo city of each particle is available,
enabling the volume (mass) flux and concentration to be computed.
Since the dimensions of the detection volume are dependent on detector requirements (minimum amplitude, minimum number of periods) and on the
scattering properties of the particles, a computation of fluxes and concentrations with respect to a reference volume is necessary. The measurement volume
can be used as this reference volume.
Consider first the flux of monodispersed particles Qpd (index d for monodispersed particles with one diameter and therefore one detection area) at the ve-
224
5 Signal Generation in Laser Doppler and Phase Doppler Sytems
locity v p = exvx . The measured number concentration npd of particles with diameter dp during the time T and for the N pd particles collected is given by
(5.141)
bd and Cd are the dimensions of the detection area for particles with diameter
d p •1 Knowing the individual particle size allows also the mass flux density qmd to
becomputed
(5.142)
where Pp is the mass density of the particle material.
One main difficulty is that the quantities bd and Cd are themselves dependent
on the particle size. Thus, for a given detection amplitude threshold Ud' the detection prob ability is larger for large particles than for small particles. Therefore,
large particles are weighted stronger in the size distribution. Especially for wide
size distributions, this error can be very significant.
Some correction is necessary when either the size distribution or the mass
flux is to be computed from the statistics of Npd(d p )' In the following, a correct
estimator will be derived based on the ellipsoidal shape of the measurement volurne. In many cases, this volume is further restricted using a slit aperture on the
detector. Such systems will be analyzed later in chapters 8 and 12.
Given an intensity detection threshold I d , the dimensions of the ellipsoidal
volume are given by Eq. (5.136). The detection area is given by Eq. (5.137). Related to I d , IAcmax(dp) is the maximum scattering signal amplitude possible for a
particle of diameter d p in the detection volume. For inclined trajectories, the
modification given in Eq. (5.88) must be used.
The validated signal rate N pd (number of signals per time) for monodisperse
particles with d p is then
(5.143)
For a trajectory parallel to the x axis passing an arbitrary point P(y po, z po) on
the plane x = 0 (Fig. 5.30), a Doppler burst
[(xo,) ~ [m~(d,)e+(
:z )']
(5.144)
with the maximum signal amplitude
1
The detection area A d = 1tbd cd in Eq. (5.143) is constant for all monodisperse particles
and could be placed in front of the summation. It is kept in the summation here because in later analyses (section 12) the detection area is particle size dependent.
5.1 The Signal Fram Arbitrarily Positioned Detector
Refcren.:e plane (x == 0)
/
225
j'\'Ieasuremenl volumc: u. ,v. ,co lI ~e -' " dem.,
y
Deleclionvolume: ud,li. ,c d
II ~ II "
Rcferencc are'd: A. == n/)."o ' ". ~e ' II A em. ,
Dele.:lion arca: Aß = nl>dcd ' " 0 ~ II J
Measuremenl
volumc
x
~
~ Parlide
Uo
I
vo]umc
Fig. 5.30. Detection plane dimensions for correction of partiele statistics
(5.145)
will be obtained. Dependent on the referenee posItIOn in the plane x = 0,
P(Ypo,z po}, amplitudes I d ~ I max (d p) ~ I Acmax (d p) are possible.
The dimensions bd and Cd and the size ofthe deteetion area A d ofthe partiele
group with d p are given in Eqs. (5.136) and (5.137). The burst amplitude Imax(d p }
ean be related to the amplitude eorresponding to the threshold I d •
(5.146)
Sinee the exaet trajeetory of a partiele is seldom known, these relations ean
only be applied in a statistieal sense. On the other hand, partiele diameters and
the distribution of maximal amplitudes for eaeh elass of diameters ean be determined by measurements. This is aehieved by averaging over all maximum
amplitudes Imax(d p } aeross the deteetion area. This average beeomes (Borys
1996)
(5.147)
226
5 Signal Generation in Laser Doppler and Phase Doppler Sytems
Using Eq. (5.147), the detection area (Eq. (5.137» can be computed from
(5.148)
Using the measured maximum signal amplitudes Imax(d p )' the partide size dependent detection area can be computed. Normalizing the detection area to the
reference area Ao' yields the correction factor
(5.149)
with which each partide size dass must be multiplied.
This factor insures that all size dasses are referenced to the same reference
area Ao of the measurement volume. This correction is apre-requisite for computing the partide size distribution (Eq. (5.141) or mass flux (Eq. (5.142».
Similar expressions accounting for the partide size dependent detection volume
has been given by Qui and Sommerfeld (1992) for a slit aperture in the receiving
optics.
One disadvantage of this approach is that the signal amplitude is not measured by all signal processors and that signal amplitude saturation can falsify the
results, especially for large partides. For this reason, a more practical approach
based on burst length will be introduced in section 12.2.3.
Furthermore, it is possible to deterrnine experimentally the integral scattering
function G. The relation to the scattering function is given by Eq. (4.160).
PACmax
rrrpIo
= AJACmax (d)
p =
2
kb
G
(5.150)
which yields for the integral scattering function
(5.151)
where 10 is the maximum intensity in the center of the detection volume, Ar is
the aperture size of the receiving optics, rand p are the modulation depths
for receiver integration and partide properties as defined in section 5.1.4, and Pd
and I d are the power and intensity threshold for detection. The modulation
depths are important for larger aperture sizes and larger intersection angles. The
maximum amplitude uAcmax(dp) or maximum scattered intensities IAcmax(dp)
can be determined from the statistics of the amplitudes for each partide size
dass using Eq. (5.147). For the determination of the integral scattering function,
the transfer function of the system must be known. For the inverse case, when
the integral scatteringfunction is known (see chapter 4), the transfer function of
the measurement system can be calculated on-line (Borys 1996).
r
r
5.1 The Signal From Arbitrarily Positioned Detector
227
5.1.7 Statistical Time Series of Particle Signals
The purpose of this section is to derive some preliminary guidelines according
to which a laser Doppler system can be matched to a given flow field. Each particle (subscript i) generates a signal, as given in Eq. (5.20), and using Eqs. (3.189)
and (3.190), the generated current is equal to
(5.152)
The time t;, is the time of the signal maximum with respect to so me reference
position ofthe particle, in this case rpo • ioc,;(t-t;) is the DC part, ri(t-t;) is the
modulation depth (visibility, Eq. (5.121)) and f/J; is the signal phase at the signal
maximum of the signal generated by the particle i. All amplitudes are understood to be values integrated over the detector surface.
The high-pass filtered signal, as shown in Fig. 5.31, is used for further processing
(5.153)
where io,; depend on the particle trajectory and are, therefore, statistically distributed. OJ D ,; depends on the flow velocity fluctuations and will also exhibit a
distribution. The width or e- 2 decay of the bursts tb are the same for all signals
generated by one particle, whereas the burst length, given by the threshold of the
detector, is different.
For system layout, the number of detected or processed signals per unit time
is of importance. For this computation, a random and homogeneous spatial
distribution of particles in the flow is assumed. Only in cases where seeding is
injected in the immediate vicinity of the volume would a non-uniform distribution be expected. The mean number of particles in the measurement volume is
I,
I,
I"
Fig. 5.31. Irregular arrival ofburst signals
I.
Time I
228
5 Signal Generation in Laser Doppler and Phase Doppler Sytems
4
_
N pa = -TC aoboconp
(5.154)
3
and the mean signal rate (number of signals per unit time) for particle trajectories through the measurement volume parallel to the x axis is
(5.155)
In these expressions the overbar indicates a statistical time average and the index 0 that the values are related to the measurement volume. For a validation
rate of 100% the particle flux QPd through the reference area is identical to the
given signal rate.
If now arbitrary particle trajectories are allowed, the influence of the trajectory on the signal rate can be investigated. The signal rate will depend on the
size of the projected reference area perpendicular to the instantaneous velo city
vector (Eq. (5.88»
(5.156)
The dependence of the factor FAv = coC~/2 on the angles ({Jv and iJ v is shown in
Fig. 5.16 and although only a weak dependence on ({Jv is observed, the effect of
iJ v is very strong.
Clearly, the zvelocity component will be strongly underweighted. This suggests that the volume should always be orientated such that the main velo city
component is aligned either with the x or yaxis of the measurement volume.
The same relations can be given for the mean number of particles N dp' the signal
rate Nd and the trajectory dependent signal rate Ndv for a given detection volurne size by replacing the measurement volume dimensions with those of the
detection volume.
For practical system layout, it is of interest to investigate the change of signal
rate when only signals above a certain user changeable amplitude threshold I d
are used for analysis. The threshold I d defines the detection volume, within
which a signal will be detected and processed. First, all particles are assumed
similar in their scattering properties, thus, they would have the same overall
maximum signal amplitude IAcmax(dp) when moving through the center of the
detection volume.
The spatial distribution of the maximum signal amplitudes Imax(d p) for arbitrary trajectories is derived by using Eqs. (5.86), (5.87) and by replacing the
measurement volume dimensions by detection volume dimensions.
( ll~o J2 + ( S~o J2
bdv
cdv
= k,
0 :-s; k :-s; 1
(5.157)
Bursts of equal amplitude will be obtained for each value of k, where k = 0 when
a particle passes through the center of the detection volume and k = 1 at the periphery of the detection volume.
Using a variable amplitude intensity, the contribution of different signal amplitudes to the total signal can be derived. Within a projected detection area of
5.1 The Signal Fram Arbitrarily Positioned Detector
dA
dv
1
2
=--A
Ov
dI
I
229
(5.158)
-
signals of constant amplitude contribute to the total particle flux as
d QPd
- -
=npdv pd
d
dI
I
1_ -
(5.159)
A dv =--npdvpdAov-
2
where Vpd is the mean velocity of particles with the size d p . In case of no correlation between particle size and velo city, the mean velocity of all particles vp can
be used instead of Vpd (see section 12.2.1). Integrating over all groups of the
same amplitude yields the particle flux of monodisperse particles of size d p
Qpd
1 - - A Ov
2
=--npdv pd
f
I
d
IAcmax(dp)
1 dI =-npdVpdAo
1- ln
I
2
v
-
II- - - -(d' - -»)
ACmax
P
Id
(5.160)
which is the rate of particle-producing signals exceeding the specified threshold.
One assumption of this analysis is that the particle flux density of a given
particle size qpd (particles per area and per time) must be uniform across the
projected detection area as illustrated in Fig. 5.32 and given by (Albrecht and
Fuchs 1987, Albrecht et al. 1990 and 1993, Hintze 1993, Borys et al. 1993)
dQPd
__
qpd =--=npdvpd
dA dv
(5.161)
The increase of signal rate with a lower threshold is illustrated in Fig. 5.33a.
The particle flux through the projected reference plane Qpo = npdvpAov /2 is used
as a normalization factor. The amplitude range associated with a higher signal
quality contributes more to the total signal rate than the outer regions of the
measurement volume, which produce signals oflower quality. This is confirmed
by examining the distribution of the signal rate as function of signal amplitude
I
4---~~----+1
k
e-2 I Acm""(d p)+----~~---+-----=-........-
qp
qpd+-------,,....----I- - - - - -
P~ticl~ flu; d-;;nsity
Detected particle flux density
A d"
Ao"
Fig. 5.32. Uniform distribution of particle fiux acrass the detection plane
230
5 Signal Generation in Laser Doppler and Phase Doppler Sytems
(5.162)
as illustrated in Fig. 5.33b.
Furthermore, if the particles are polydisperse in size, the integral must also be
performed over the size distribution function. The maximum amplitude for
particles can be expressed in terms of the maximum modulation depth rand
the integral scattering function Gp (see section 4.3)
I ACmax (d p) = Cr(dp)G p(d p)
(5.163)
All detection parameters are combined into the constant C. Equation (5.160)
then becomes
(5.164)
(5.165)
For all parameters, an integration over the detector surface has been assumed.
Equation (5.164) can be inverted as a fundamental means to measure particle
size distributions. For this, the scattering function must be "continuous".
In a similar mann er, the size distribution can be derived from the distribution
ofthe number of periods in the detected signals as discussed in section 9.1.1 for
the cross-sectional area difference method (Albrecht and Fuchs 1987, Albrecht et
al. 1990 and 1993, Hintze 1993, Borys et al. 1993).
~
i3
(Ö
0,6
.[n
'"
.~
0,4
'"
~
I=e'I
(d)
d
AClIlax
p
0,2
( A d" = A o" )
0,
°
°
L..J....u.J...-'-'--'-'--'--'L.....L.l...-1--'--'---'---"---L-JWLJ...J....J.J
2
4
Relative threshold
6
IAcm~
8
( dp ) lId [-]
0,
°
L...L--1..L.J.......J.---'-..J......JL.......L..-'-'--'--'-..J......J----'----'-"""
e
0,5
LO
Relative signal amplitude Im~ I IAC mox [-]
0,0
Fig. 5.33a,b. Influence of the specified amplitude detection threshold on signal rate
5.2 Laser Doppler Technique
231
The laser Doppler technique is an indirect measurement method, which sampIes the flow velocity at discrete times. The sampling function is dictated by the
detection and validation of the signals generated by scattering particles. Most
flow properties of interest will in some way rely on a minimum signal rate being
achieved, which is now the topic of closer scrutiny.
Given a homogeneous and random distribution of particles in the flow, the
signal rate can be derived using Poisson statistics. The probability function
p(N p) that Np particles are simultaneously in the detection volume is given by
(5.166)
where Np is the expectation (average particle concentration times volume of
detection volume). For Np < I the most likely probability occurs for Np = 0, i.e.
no particles in the volume. Generally it is desirable to avoid multiple particle
signals, at least from the point of view of the signal processing. This condition is
often referred to as the single realization mode. It is now interesting to specify
the optimum particle concentration to maintain the single realization mode,
while maximizing the signal rate.
Accepting multiple signals only less than 0.5 % of the time p(N p > I) < 0.5 0/0
results in Np = 0.1 (p(N p > 1,0.1) = 1- p(O,O.I)- p(I,O.I) = 0.0047; p(O,O.I) = 0.9048;
p(I,O.I) = 0.0905). The allowable particle concentration is then given directly by
Eq. (5.154) for the detection volume dimensions. For Np> 0.1, the signal overlap
from multiple scatters is no longer negligible and the validated signal rate may
begin to decrease.
Three concentration ranges can be distinguished:
• Np <0.1: single realization with a probabilityof99.5 0/0
• N p :2: 0.1 : multiple particle signals, in which the superposition of random
amplitudes deteriorate signal quality and may lead to a lower signal rate
• Np> 10: a quasi-continuous signal.
As an example, the condition Np< 0.1 leads to an average particle concentration of np < 6.6 mm- 3 for the system specifications used in Fig. 5.5. If the concentration is too high, more stringent validation, such as a higher amplitude
threshold, can be used to decrease the detection volume and thus insure single
realization operation.
5.2 Laser Doppler Technique
The laser Doppler technique is most widely used as a technique for flow velo city
measurements, although industrial applications involving solid surface velocities are also not uncommon. For flow studies, the two optical configurations
shown in Fig. 2.4 are used almost exclusively: the dual-beam technique (Fig. 2.4a)
232
5 Signal Generation in Laser Doppler and Phase Doppler Systems
or the reference-beam technique (Fig. 2.4b). The latter is more of historical significance, being the first realization of the laser Doppler principal, but has been
used also recently in some configurations for long range (Dopheide et al. 1990)
and boundary layer measurements, in which it is combined with a time-shift to
yield also particle position (Strunck et al. 1994, 1998).
In both configurations the illuminated volume is formed by the intersection
of two beams, onto which the detector is focused. The flow velocity is proportional to the modulation frequency in signals generated by tracer particles moving through the illuminated volume. The proportionality constant is given
uniquely by the wavelength and intersection angle (Eq. (5.92», hence no special
calibration of the technique is necessary.
As with all tracer-based methods of flow measurement, the light scattering
particles must follow all flow fluctuations slip-free. The requirements placed on
the particle to insure that this is the case are discussed fully in section 13.1. and
will be assumed to be fulfilled in the following discussion.
5.2.1 Dual-Beam Configuration
Most laser Doppler systems correspond to the configuration shown in Figs. 2.4a
and 5.1 , the so-called dual-beam technique. With this optiCal arrangement,
there are two illuminating beams and the detector is positioned either in the
forward scatter direction,CPr = 0 deg and IfI r = 0 deg or in backscatter direction,
CPr =Odeg and IfI r =180 deg (Fig. 5.34). The advantage ofthis optical configuration is that the measurement volume is uniquely defined by intersection of the
beams. Since sm all particles are preferred with the laser Doppler technique, the
corresponding relations derived in section 5.1.2 define the measurement and the
detection volumes.
y
Rc~ciycr in forward
scattcr dircction
Rc~civcr in ba..:kward
scattcr dircct io n
Fig. 5.34. Dual-beam laser Doppler arrangement with forward-scatter and backscatter deteetion
5.2 Laser Doppler Technique
233
Due to symmetry, the scattering functions for each beam can be considered
equal, Eq. (5.31). The signal comprises a DC part, arising from the scattering of
each beam (Eq. (5.32))
(5.166)
X
h( r; xopzop sin BI cos BI]
cos
4
.
12
12
and a modulation part, arising from the superposition of the two scattered
waves, Eq. (5.36)
(5.167)
Indeed, the particles used with the laser Doppler technique are usually small
enough that the interference model (Eqs. (2.15) to (2.29)) is applicable. The
measurement volume therefore corresponds exactly to the illuminated volume
at the beam intersection. The dimensions of the measurement volume are given
by Eq. (5.40) and the volume itself by Eq. (5.41). The dimensions of a detection
volume prescribed by a given intensity threshold can be computed according to
Eqs. (5.42) and (5.43) and considering the scattering properties of the particle.
The path length and the number of periods for a particle moving through the
detection volume vary with flow direction. The Doppler frequency, the maximum number of periods in the burst signal and the projected detection area
seen by particles can be computed using Eqs. (5.92), (5.80) and (5.88) respectively.
Laser Doppler systems are generally equipped with acousto-optic modulators
(Bragg cells), which allow the flow direction to be resolved (section 5.1.5). This
also permits very small velocities to be correctly measured. Because focused laser beams, e.g. Gaussian beams, with curved wavefronts are used for the laser
Doppler techniques, the most important uncertainty is produced by the diverging fringe system. A description of the influence is given in sections 5.1.2.1 and
can be reduced to Eq. (5.56). A more complete description ofhow a dual-beam
system can be designed to best match a given flow study is given in chapter 7
and in section 14.1.1.
5.2.2 Reference-Beam Configuration
Historically, the first laser Doppler device was a reference-beam arrangement
(Yeh and Cummins 1964). In fact, the reference-beam method requires only one
illuminating beam in the flow, although the reference beam is generally also
passed through the flow to localize the measurement position when adjusting. A
superposition of the reference beam with scattered light from tracer particles
234
5 Signal Generation in Laser Doppler and Phase Doppler Systems
generates the Doppler signal. Recently, the reference-bearn technique has been
used more frequently, mainly due to lower noise levels in lasers and semiconductor detectors. Semiconductor detectors can be placed directly in the path of
the reference bearn, as opposed to photomultipliers, which saturate or suffer
damage.
Figure 5.35 (Fig. 2Ab) illustrates a typical reference-beam arrangement. The
detector is placed in the path of the reference beam, i.e. at fjJ r = 0 deg and
lfI r = ± %. The second bearn is used for illumination of the particles and generates the scattered wave. Both beams have a waist radius of rw1 = rw2 = rw and the
same wavelength Ab. Generally an unequal amplitude ratio is used, favoring the
illuminating bearn, e.g. 5 % /95 %. In this way the amplitude of the scattered
wave compared to the reference wave can be improved, which yields a high er
modulation depth in the signal. A system will now be analyzed in which the detector (r = 1) is placed directly in the line with one bearn (b = 1) e 01 = e 1
(IfIr = +%), as shown in Fig. 5.35. The position vector of the detector (Eq. (5.2»
is given by
(5.168)
For simplicity, the assumption is made that all waves on the detector surface
have the same polarization er A small surface area Mn on the detector will be
considered. In the analysis no consideration is given to which scattering order
falls onto the detector, since for the laser Doppler technique only the frequency
of the signal is used far velocity measurement and the phase of the detector signal is not relevant.
Three waves contribute to the signal on the elemental area Mn: the reference
X
;",,,.,,":~:Virtual
fnnges
L-
11
""
Beam 2
k,
Main flow
direclion
ßeam I
Fig. 5.35. Reference-beam laser Doppler arrangement
5.2 Laser Doppler Technique
235
beam (gbl ) and the scattered waves from each of the two beams (gll' g2l )
(5.169)
Since all components exist on the same elemental area, subscript n will dispensed with.
§.bl is the wave amplitude of the reference beam (b = 1) on the detector surface
(r=I), as given by Eqs. (3.59) and (5.8)-(5.10) (Fig. 5.36) (rwl =rw2 =rw '
ZRI
= ZR2 = ZR)
(5.170)
rml (rOl ) is the radius of the reference beam at the detector, 'l,n is the position of
the surface element Mn in the laser beam and R1 (rm ) is the wavefront curvature
at the detector.
§.ll is the scattered wave from beam 1 on receiver 1, Eq. (5.19).
+arctan(
X OP
siniJ2' +zop cosiJ2'] + If/ll
ZR
II
ßeam2
Beam I
Fig. 5.36. Relation between scattered wave and detector surface
236
5 Signal Generation in Laser Doppler and Phase Doppler Systems
511 is the scattering function, rm1 (rüp ) is the beam radius and R 1 (rüp ) the wavefront curvature at the position of the particle r üp '
The relations between the scattered wave, the reference beam and the detector
surface are clarified in Fig. 5.36. The phase 1f/ 11 includes phase differences
caused by the particle, which for small particles vanish.
The scattered wave from beam 2 is similar in form
+arctan(
-xüp
sin,% + züp cos'%
ZR
J+ ]J
If/ 21
The total power for the detector is therefore given by Eq. (3.183)
PI = c2e
JJ (gI + Qll + Q21 )(Q~ + Q;'1 + Q;I) dAr
(5.173)
A,
The assumption of a point detector is made, meaning that the field strength does
not vary significantly in the immediate neighborhood of the chosen point. Exact
computations can be carried out using EGO or FLMT.
Figure 5.37 illustrates the individual contributions to the total detector signal
for the parameters given in the figure caption. Two particle trajectories on different sides of the illuminated volume were considered: rüp = (x üp ' 0, 100 11m)
and rüp = (x üp ' 0, -10011m). The detector power is normalized with the input laserpower.
The detected signal comprises four components:
1. The three waves generate a DC part of the signal equal to
(5.174)
Ce
,
I DC ,bl =2Qblgbl'
I DC,21
=
Ce E E*
2 _21_21
(5.175)
The first term I DC bl dominates and arises directly from the reference beam
(Fig. 5.37a,b). The'next two terms I DC,l1 and I DC,21 are DC parts due to the two
scattered waves. These are the same parts as the DC parts in the dual-beam
technique. They do not contribute substantially to the total DC part of the
signal (Fig. 5.37c,d).
2. A negative DC part arises from the superposition of the reference beam with
the scattered wave from the reference beam, i.e. with a Gaussian attenuation.
5.2 Laser Doppler Technique
Trajectory A:
a
237
Trajectory B:
b
'9
8
500
'C
.
'E'
'"
'""
0
""
]
:aEi
<
-500
c
'":=;
0.4
~~
'"
0.2
:&Ei
0.0
<
'":=;
'C
". :'
,/1' .
:9"
lvI! :~··~t "
---_.....,..,.'.,.
" I, "
.. I, " "'
~, ':
,-~""
-0.2
e
500
0
""
'"" -500
:9
:& -1000
","
Ei
<
-1500
-20
o
20
-20
Particle position xOp [11m]
o
20
Particle position x Op [11m]
Fig. 5.37a-f. Signal contributions in a reference-beam arrangement for two different partide trajectories (left side: Zpo =Zop =100llm, right side zpo =zop =-lOOllm) according
to Eqs. (5.170)-(5.181) (rw=lOllm, e=7deg, 511 =5.5, 512 =4, ro1=100mm, Yop=O).
a,b Signal relevant contributions, c,d Signal parts with minar significance, e,fFull detector signal
[De2
CC( QblQll* + QllQbl* )
=2
(5.176)
Essentially this corresponds to the energy removed from the reference beam
through scattering by the particle. Thus, the total DC part of the signal experiences a negative dip in amplitude as the particle traverses the volume, as
shown in Fig. 5.37a,b. Exact computations for this signal can be obtained using FLMT or EGO.
Since the negative dip results from interference of the reference beam with
the scattered wave from the reference beam, the negative dip of the DC part is
shifted with respect to x = 0, such that the minimum amplitude is obtained
for the particle position
238
5 Signal Generation in Laser Doppler and Phase Doppler Systems
XDCmin
=zpo
tan~
(5.177)
This property of the DC signal part has been exploited to determine also the
position of the trajectory. For this technique, two reference-beam systems
were operated simultaneously with one detector on each beam (Strunck et al.
1993). The time delay between the signal minimum corresponds to
Llt DC = 2x DCmin I v x and the z position of the particle trajectory can be measured by
Z
z
0
p
=
Vx
Llt
2tan~
(5.178)
3. The essential part of the signal for the velo city measurement is the alternating
part arising from interference between the reference beam and the scattered
light from beam 2.
I AC1 =
2CC( Qb1 Q21* + Qb1* Q21 )
(5.179)
This part of the signal is illustrated in Fig. 5.37a,b. It reaches a maximum
when the scattered wave from beam 2 reaches its maximum, i.e. when a small
particle is at the center of beam 2. The position of the burst maximum is
given for small particles (d p < 3Ab) by
X ACmax
=-zpo tan~
(5.180)
Therefore, also this modulated part of the signal is shifted in time compared
with the time when the particle is at the position x op = O. The distance on the
trajectory between the burst maximum and the DC part minimum is
2z po tan ~, which can be used directly to determine the z component of the
particle trajectory (Strunck et al. 1993).
If two, symmetrie reference-beam systems are used, i.e. adetector is placed
directly in the path of each beam of a laser Doppler system, then the z coordinate of the particle trajectory can be determined using the distance between
the two burst maxima, 2XpACmax (Strunck et al. 1993). This is analogous to the
distance between the two burst minima, given in Eq. (5.177).
4. A further modulation part of the signal arises from the interference of the two
scattered waves (Fig. 5.37c,d). This corresponds to the AC part in the dualbeam technique
I Ac2
CC( QllQ21* +.Qll.Q21
*
)
=2
(5.181)
However, this contribution is significantly smaller in amplitude than the portion given above in (Eq. (5.179».
The principle contributions to the signal are summarized as:
• DC part ofthe reference beam (Eq. (5.174»
• Superposition of reference beam with the reference-beam scattered part
(negative DC part, Eq. (5.176»
5.2 Laser Doppler Technique
239
• Superposition of the reference beam and the scattered light from beam 2
(modulated part 1, Eq. (5.179»
• Superposition of the reference-beam scattering and the scattered light from
bearn 2 (modulated part 2, Eq. (5.181»
The total sum of all contributions is shown in Fig. 5.37e,f.
Since the reference bearn contributes directly to the modulated signal part,
relatively good signal quality can be obtained using small apertures in the
x direction and wide apertures in the y direction (e.g. slits or cylindricallenses)
in front of the detector. Typically, semiconductor detectors (e.g. PIN diodes) are
employed, due to the high light levels involved. A further approach is to use
large stand-off distances between the transmitting optics and the measurement
volume and between the measurement volume and the detector. This has been
exploited byDopheide et al. (1990) for a system used in wind tunnels.
The measurement volume of a reference-beam anemometer is a virtual measurement volume, existing only for the detector. It is positioned along the axis of
the illuminating bearn. For a detector aligned on beam 1, a measurement volume
along beam 2 is perceived. Such a virtual volume is pictured schematically in
Fig. 5.38 and computed using EGO in Fig. 5.39.
The extent of the measurement volume in a reference-beam system is determined by two factors: first by the centerline amplitude of the illuminating beam
and second by the modulation depth of the interference between the reference
beam and the scattered wave from beam 2, integrated over the detector surface.
Since the field strength of the reference bearn over the detector surface acts as
a constant factor, the amplitude-limiting extent of the measurement volume is
determined mainly by the amplitude of beam 2, the illuminating beam. The
measurement volume dimensions computed for a point-like receiver are illustrated as a function of the intensity ratio within a laser beam in Fig. 5.40. The
volume boundaries can be approximated in the x and y coordinate directions
using the e- 2 amplitude decay, with ao '" bo '" rw and in the z coordinate direction using co'" 2.53 xl R cos~. For the example pictured in Fig. 5.40, this results
in amplitude boundaries of (l R = 13.27 mm) ao '" bo '" 60 ~m and Co '" 33.6 mm.
The second limitation of the virtual measurement volume is dictated by the
modulation depth of the interference between the reference beam and the scat-
----
Virtual mcasurcmcnt
volumc
x
Rcfcr ncc bcam
Photodiode
~~~~z
.- - - - - - - -=
~ - --:-----/
e
Partide
Illuminating bcam
Fig. 5.38. Arrangement oflaser beams, receiver and measurement volume
240
5 Signal Generation in Laser Doppler and Phase Doppler Systems
~... IOO "" ~
I
I
I
-
I
I
~
...0
Power
p la.u·1
49.0
.
...
~
.
....
"
o
Q..
-50
1-
......
.'.-._.•
,-
-48.7
Parlicle position zOr II'I11J
Fig. 5.39. Virtual measurement volume for a reference-beam arrangement, detector in
beam 1, computed using EGO (Borys et al. 1998), (Ab = 852 nm, e = 9 deg, rw = 60 ~m,
d p =8~m, m = 1.33, rOl = 700mm, 1j =0.5 mm)
- 1 1.5
....
~o
'"::I
'i5
l.':
'"E
1.0
::I
Ö
>
C
.,
§
::I
.,"'"
E
0.5
<J
.~
'"
C2
2
MC'dsurmcnt volume lcnglh relalcd 10 Raylcigh lcnglh
3
<"01',1-1
Fig. 5.40. Measurement volume dimensions as a function of intensity ratio in the illuminatingbeam
tered wave from the illuminating beam, integrated over the detector surface
(Drain 1980). Since the detector surface is small compared to the distance between the measurement volume and the detector, the amplitude and phase of
the beam can be considered constant over the detector surface. However, the
5.2 Laser Doppler Technique
241
scattered wave is a spherical wave, for which the amplitude, the phase and the
propagation in the receiving direction will depend on the particle position in
beam 2 (Fig. 5.38).
The angle a between the reference beam and the scattered light from the illuminated beam depends directly on the position of the particle in the illuminating beam, as shown in Fig. 5.38. Fig. 5.41 illustrates the interference pattern
at the detector plane for two different particle positions along the axis of the illuminating beam Z2' These results have been obtained using FLMT computations and for the parameters given in the figure caption. The fringe spacing on
the detector surface is given by
L1s(a)=~
(5.182)
2sin a
2
and from Fig. 5.42, this can be expressed as
a = arctan(_Z-=2~S_in_e_-_J
r01
-
(5.183)
Z2 cose
For small angles a this can be simplified to
Z2 sine
(5.184)
a~-"---
and
b
a
E
1.0
E
..'"
~ 0.5
'S
1:
c
o
§
0.0
~
,..,o
· 0.5
· 1.0
- 1.0
· 0.5
0.0
0.5
1.0 - 1.0
Location on receiver x, [mm l
-0.5
0.0
0.5
1.0
Location on receiver x,lmml
Fig. 5.41a,b. Interference pattern on the detector plane of a reference-beam system arising from the reference beam and the scattered light from the illuminating beam for two
positions of the scattering partide along the axis of the illuminating beam z, (FLMT calculations, A. b = 852 nm, 6J= 9 deg, rw = 65 ~m, r01 = 700 mm). a z, = 1 mm, b z, = 4.5 mm
242
5 Signal Generation in Laser Doppler and Phase Doppler Systems
z
Partidc
Fig. 5.42. Geometry for the interference between the reference and scattered wave on the
receiver
(5.185)
Therefore, not only can the z co ordinate of the particle be determined from the
time shift of the signal maximum (Strunck et al. 1993), but also the spatial frequency of the interference pattern at the detector plane can provide this information (Borys et al. 2000a, b).
The spatial extent of the virtual measurement volume in a reference-beam
system is given by the geometry of the system and the wavelength. For adetector
diameter of 21i, constructive interference occurs on the surface of the detector
for 21i I Lls::; 0.5, i.e. over an angle
A
a <_b
c -
(5.186)
41i
This angle (coherence cone, Drain 1980) limits the measurement volume to
z <
2 -
"01 sina
c
sin(EhaJ
(5.187)
For angles a> a c the amplitude decreases (destructive interference) up to complete elimination at 21i I Lls = 1. This corresponds to an angle
Ab
a d =2a c = 21i
(5.188)
The amplitude of the modulated signal at the detector is given by an integration of the interference field over the active surface of the detector. Analogous to
computing visibility for a spherical particle in an interference field (Drain 1980),
the modulation amplitude for a circular aperture is given by
(5.189)
with
5.2 Laser Doppler Technique
r
Ij
r1z 2 sine
As
Ab rOl
243
(5.190)
':> =2n-"'21t....!.....c~-
Since the function 2/1 (I;) I;; has its first zero at 21j I Lls =1.22, the angles a c and
a d according to Eqs. (5.186) and (5.188) are actually larger for a circular aperture. They can be computed as
1.22
Ab
a d =2ac =
-21j
(5.191 )
The Eqs. (5.186) and (5.188) are really only valid for a rectangular receiving
aperture. An integration of a rectangular aperture with the area Ar = drxd ry yields
an expression similar to Eq. (5.189), namely
. 1tdrx
Sln-
PAC
'"
10 drxd ry _--=A~s,­
nd rx
As
(5.192)
These properties of the virtual measurement volume of a reference-beam
system can be verified either numerically, using a light scattering computation,
or experimentally. In either case, it becomes evident that the influence of the
modulation depth dominates the generated signal and that the intensity decrease along the axis of the illurninating beam can be neglected in comparison.
Fig. 5.43 shows the measured and computed (EGO) variation of modulation
depth as a function of particle position for the measurement volume already
pictured in Fig. 5.39 (Borys et al. 1998). The measurements and computations
agree weH in terms of the main lobe and side-Iobe positions. According to Eq.
b
a
PAC [mW]
0.08
o
·5
o
-10
5
Position z [mm]
Fig. 5.43a,b. Position and extent of measurement volume for the reference-beam technique (Borys et al. 1998) (A = 852 nm, rw = 60 ~m, B=9deg, rOl = 700 mm, Ii = 0.5 mm).
a Measured values, b Computation with EGO
244
5 Signal Generation in Laser Doppler and Phase Doppler Systems
(5.191) the modulation depth vanishes for a d = 0.0596 deg, which, using Eq.
(5.187), yields a z position of z = Z 2 cos~ = 4.6 mm. This agrees well with the results presented in Fig. 5.43.
5.3 Particle Sizing with Phase Doppler and Time-Shift Technique
For particle sizing, the laser Doppler technique uses a minimum of two detectors, placed at an off-axis angle f/Jr and at the elevation angles of ±VJr (Fig. 5.44).
This allows determination of the diameter of spherical, homogeneous particles
of dimension significantly larger than the wavelength (d p »Ab)' The diameter
can be inferred from both the amplitude and the phase of the resultant signals.
The glare points on the surface of the particle effectively sam pie the amplitude
and phase of the incident laser beams, thus, both amplitude and phase of the
signal contains information about the surface curvature. Scattering orders above
reflection depend not only on the size and shape of the particle, but also on the
medium. The quantitative relation between amplitude, phase and particle size
depends on the relative position of the incident and glare points on the surface
of the particle. It is now necessary to derive this expression as a function of the
scattering order.
The analysis will be carried out for detector 1 (r = 1) in Fig. 5.44. The position
for the incident points on the particle surface relative to the origin are given by
Eq. (5.4) and for the glare points on the particle surface relative to the origin are
given by Eq. (5.5).
The signal at the detector is given by Eq. (5.20). For size measurements only
the modulated part of the signal is of concern. In principle, laser beams of dif-
E,
e,
Fig. 5.44. Optical arrangement for particle sizing using the laser Doppler technique
5.3 Particle Sizing with Phase Doppler and Time-Shift Technique
245
ferent wavelengths could be used for the size measurement, although a single
wavelength will be assumed below. The particle size can be determined on the
basis of
• either the instantaneous phase shift between modulated signal parts of the
two detectors (phase Doppler technique)
• or the time shift between the signal maxima on the two detectors (time-shift
technique)
If the intensity at the two glare points is approximately equal, then only the
phase of the modulated signal contains information about particle size. This
condition is met when the particle diameter is small with respect to the measurement volume dimensions. A statie analysis of the Doppler signal yields the
local phase of the detector signal. This is the basis of the phase Doppler technique.
A dynamic signal analysis must consider also the Gaussian intensity distribution of the incident beams (inhomogeneous field). The influence of the beam
intensity distribution on the signal amplitude is investigated, which leads direct1y to a time shift of the signals at the detector. This aspect leads to a technique known as the time-shift technique for particle sizing. The time-shift technique does not preclude the simultaneous use of the phase shift. In this respect,
it is useful to recall that the phase shift remains when the incident beams are
plane waves, while the time shift no longer exists.
In Fig. 5.45 the relative amplitude at the incident points of the two beams and
for one exemplary positioned receiver is given as a function of the normalized
particle position. The ratio of the particle diameter to the beam waist diameter
Intensity at incident point of: - - first beam
-1
second beam
dPIldI ' =0.1
o
2
Normalized particle postion
x op
I dp [-]
Fig. 5.45. Relative intensity at the two incident points as a function of normalized particle
position. The ratio of particle diameter to beam waist diameter has been varied
(if/,.=üdeg, ~,.=3üdeg, e=2üdeg, N=l)
246
5 Signal Generation in Laser Doppler and Phase Doppler Systems
has been varied in the diagram. For very small partieles the amplitude is constant for all partide positions and over the whole partiele diameter. For larger
partieles this is only true over smaller ranges. This demarcates the limits between the phase Doppler technique (static analysis of signals) and the time-shift
technique (dynamic analysis of the signals). In the static signal analysis the dependencies on partiele diameter are investigated only for partieles positioned at
the origin. This analysis fails for larger partieles, because the amplitude decreases. Since for shaped beams the inhomogeneous amplitude is inherently associated with non-plane wavefronts, also the phase cannot be weIl described by
the static analysis for large partieles. Therefore the dynamic analysis has to be
used for larger partieles. Often a quasi-static analysis can be used for the phase.
For the case shown in Fig. 5.45, this could be performed for the normalized partiele position at xO p I dp = -0.48, where the static conditions are always fulfilled.
For such a quasi-static analysis the dependencies on system and partiele parameters e.g. receiver location, intersection angle and refractive index have to be
known very weIl beforehand and the analysis has to be dynamically adapted for
every individual case.
In the following analysis the assumptions given in Eqs. (5.23) to (5.26) are
made. Furthermore, the wavefront curvatures are neglected and therefore the
Doppler frequency does not vary in the signals. The signal amplitude changes
are considered. The AC part of the signals is given by the intensities at receiver 1
(see section 5.1.3)
11(t) = 1AC,I (t- tl )cos[ OJ D(t- tl ) + cPI ]
+" t~t,)'] oo~
=Im.' exr[
w, (t -t, )+<J>,] ,
tl = t ACmax,1
(5.193)
t2 = t ACmax,2
(5.194)
and receiver 2
12(t) = 1AC,2(t- tJcos[ OJ D(t - tJ + cPJ
=Im., .• "'{-( v, t~t,
)}o.J:
w, (1-1,)+ <J>,] ,
The temporal shift of the bursts Atl2 = -(tl - t 2 ) is given by the Eqs. (5.116)
and (5.114) and the phase shift AcP12 = cPI - cP 2 from Eq. (5.109). Both the time
shift and the phase shift are functions of the incident points and glare points 0n
the surface of the partiele. As such they are also functions of partiele size and
shape, relative refractive index m, intersection angle e, detector position rfJr' IfI r
and scattering order. The phase shift results from the sampling of the wavefronts, the time shift results from the sampling of the intensity profile of the
beam by the incident points. The incident and glare point positions on the partiele surface depend also on the partiele position in the volume, thus with partiele
movement the phase difference and time shift will also change (Borys 1996).
However, in practice this effect can be almost neglected (see sections 5.1.2.1,
5.1.3.1 and 7.2.4).
5.3 Particle Sizing with Phase Doppler and Time-Shift Technique
247
5.3.1 Determination of Incident and Glare Point Positions
Reflection and first-order refraction are the most commonly used scattering orders for the phase Doppler and time-shift technique. The relation between the
incident point position, the glare point position and the diameter of a spherical
homogenous particle will now be derived for these orders.
5.3.1.1 Reflection (N = 1)
For reflection the incident point and the glare points are coincident
(5.195)
For a spherical particle of radius rp ' the glare point at position (Fig. 5.4)
(5.196)
is determined by the unit vector of the scattered wave
e~~b' using the law of reflection (Fig. 5.46a)
')
r'( =r
br
p
(i)
Ie
(i)
p,br -
and the incident wave
(i)
e p br - e w br
'
e~~b,
,
(i)
ew,br
(5.197)
I
With a large receiver distance and a particle position near the intersection point
of the laser beams
e(i)
- e - e
p,br ~ pr'-'- Or)
e(i)
""
w,br
eb
(5.198)
Eq. (5.197) yields
(5.199)
Thus the position of the reflection points on the particle surface are given by the
detector position and beam orientation.
a
Fig. 5.46. Vector relations for scattering from a spherical particle. a Reflection,
b Refraction
248
5 Signal Generation in Laser Doppler and Phase Doppler Systems
Using the beam vectors of Eq. (5.1) and the detector positions according to
Eq. (5.2), the glare point positions for reflection(index br) can be computed as:
(;) _
rll
J
sin lfI r - sin !Ji
cos IfIr sin9r
[
coslfl r cos9r-cos!Ji
rp
-
r::: ~
,,2 1- sin IfIr sin!Ji - cos IfIr
J
- sin lfI r - sin ~
cos IfIr sin 9 r
[
(5.200)
cos9r cos!Ji
coslflrcos9r-cos~
(;)
r I2 = rp r:::
,,2~I+sinlflr sin!Ji-coslflr
(5.201)
cos9r cos!Ji
(5.202)
[
-sin lfI r + sin ~
coslflr sin9r
J
(;)
coslflr cosr -cos!Ji
r 22 = rp r:::
,,2 ~1- sin IfIr sin ~ - cos IfIr cos9r cos~
(5.203 )
5.3.1.2 First-Order Refraction (N = 2)
Using the law of refraction (see section 4.1.1.2) and knowing the unit vectors of
the incident beam and the detector position, the primary glare point position
can be derived with the assumption e~~b' "" eb and with the help of Fig. 5.46b
e(;)
br
=
(g)
[
.,
(.
.,
mep,br- m+2slnT br slnTbr-mslnT br
)]
eb
2 (sin Tbr -msin T' br )[ m +sin T' br (sin T br - m sin T'br )]
(5.204)
(5.205)
The position of the secondary glare points is given as
[
•
I
(.
•
,)]
m+2Sln T br Sln Tbr -mSln T br
(g)
ep,br -m e b
2 (sin T br - m sin T' br ) [m + sin T'br (sin T-m sin T' br )]
r(g)
br
Using the law of refraction
=
r
e(g)
p br
(5.206)
(5.207)
5.3 Particle Sizing with Phase Doppler and Time-Shift Technique
cos'lbr
np
nm
(5.208)
--=-=m
cos'l~r
249
(5.209)
and the relations
U))
e"br' (-e br
=
.-,
SIn" br
(5.210)
the terms
(5.211)
sin 'l br =
(5.212)
can be given explicitly.
For plane waves and
(f
= 1, 2,
für»
f p (e~~b,
"" ep' "" e o,.) Eq. (5.204) now simplifies to
b = 1, 2 )
[
m (±sin If/r) - [m + 2 sin 'l'br (sin.'l rb - m sin T'br)] (±sin 1Ji)]
m coslf/r SlllyJr
m cos If/r cosyJr - [m + 2 sin T'br (sin Tbr - m sin 'l'br)] coslJi
.
e(d - --'-----,----------=----:-;0----,--------"---,,--"--
2 (sin Tbr -m sin T'br)[ m + sin T'br (sin Tbr -m sin T'br)]
br -
(5.213)
and (5.206) to
(±Sin If/r) [m + 2 sin 'l'br (sin Tbr - m sin T'br)] - m (±sin 1Ji)1
[
[m + 2 sin T'br (sin Tbr - m sin T'br)] coslf/r sin yJr
[m + 2 sin T'br (sin 'l br -m sin T'br)] COS If/r cosyJr - m coslJi
e(g)
br
=- " " - - , - - - - - - - - - - - : - ; 0 - - - " - - , - - - - - - - - - - , , - - - " 2 (sin Tbr -m sin 'l'br)[m+sin T'br(sin'lbr -m sin T'br)]
(5.214)
with
sin 'lbr
=
sin 'l'br =
(5.215)
(5.216)
250
5 Signal Generation in Laser Doppler and Phase Doppler Systems
These relations allow the position of the incident and glare points for firstorder refraction to be computed. Note that with the assumptions given in Eq.
(5.198), the Eqs. (5.213) to (5.216) are independent of partide position and
therefore the position and time-independent phase r[Jr can be used instead of
the instantaneous phase f/J r (see section 5.1.3.1).
For symmetrie receivers like in Fig. 5.44, and for large distances to the partide (rpr »dp )' the plane wave case yields additionally
e1 ·ri;) =e 2 ·ri2
sin r'll = sin r'22
e1 ·ri~) =e 2 ·ri?
(g) -
sin 7'12 = sin 7'21
(g)
e p,ll • rl! - e p,22 . r 22
ep,12 . r12(g) -- e p,21 . r 21(g)
= sin 7 22
sin 712 = sin 7 21
sin 7l!
(5.217)
Similar relations for higher order incident and glare points can be derived in
an analog manner. This is in fact the basis of the EGO light scattering approach.
5.3.2 Phase Doppler Technique
Equal amplitudes at both glare points occur only for an approximately homogeneous incident field around the scattering partide or when the glare points are
very dose together. This defines the condition for which the static signal analysis
is valid. The phase of the detector signal is an instantaneous quantity which
changes with time and must therefore be referenced to a particular position of
the particle. The principle of the phase Doppler technique lies in positioning the
detectors such that the instantaneous phase difference is directly proportional to
the diameter of a spherical homogeneous particle. The detectors must be positioned such that light of only one scattering order dominates the signal. For this
condition the relation between phase difference of the detector signals Eq.
(5.109)
+ kbeOl' (r 21(g) -rl!(g)) - kb e 02 ' ((g)
r 22 -r12(g))
(5.218)
+ (VFS,21 -VFs,l!)-(VFs,22 - VFS,12)
and the partide diameter must be found. This is be carried out for each scattering order, e.g. N = 1 (reflection) and N = 2 (first-order refraction) in the next
two sections. For N > 1 the refractive index of the partide medium must also
enter the computation.
5.3 Particle Sizing with Phase Doppler and Time-Shift Technique
251
5.3.2.1 Reflection (N = 1)
For reflection (N = 1) the primary and secondary glare points are coincident,
thus Eq. (5.218) reduces to (Albrecht et al. 1993)
(5.219)
+k b [e ol ' (r 21(g)
(g)) - e
- r l1
(g)
02 ' r 22
(g))]
- r l2
The phase difference between the glare point and the receiver can be replaced by
the phase difference between the particle center and the receiver and the particle
center and the incident point. Therefore Eq. (5.219) reduces to
·r(i)-k
.r(;j)-(k
·r(i)-k
.r(i))]
LllP(J)=-LllP(J)=lP(J)-lP(J)=2[(k
12
21
I
2
I
11
2
21
I
12
2
22
(5.220)
With these relations for the glare points, the relation between the particle diameter and the phase difference is given by
LllP~V = 2rr.,[i
dp(~l-coslf/r costPr cos~+sinlf/r sin~
/L
b
(5.221)
-~l-coslf/r costPr cos~-sinlf/r sin~)
for symmetrie receiver locations as shown in Fig. 5.44 (tPl = tP2' IJI I = -1JI2)' This
relation was given first by Flögel (1981) for the condition of a homogeneous field
around the particle.
Figure 5.47 shows the detector signal for the reflective mode. The dependence
of the phase difference on the particle diameter for reflection is shown in Fig.
5.48.
5.3.2.2 First-Order Refraction (N =2)
Most phase Doppler systems use first-order refraction (N = 2) scattering. The
contribution to the phase difference arising from the light passage through the
particles (Fig. 5.46b) is given as
4rrm.
If/S,br
= - kb m r"br =--/L-fp SIll T br
I
(5.222)
b
so that Eq. (5.218) for first-order refraction becomes
LllP~;)
= - LllP~~) = lP~2) _ lP~2)
= k (rl(:) -rl(~)) - k 2 • (ri:) j •
ri;))
+ k b [ e OI • (rif) -rl(p)- e 02 . (rit) -
+ k b m(r,.11 -
r,,21 - f,,12
+ f,,22)
rin]
(5.223 )
252
5 Signal Generation in Laser Doppler and Phase Doppler Systems
LldJ(2)=dJ(2)_dJ(2)=k
[e .(r(O-r(O)-e
12
1
2
bIll
12
2.(r(i)-r(O)]
21
22
+kb [e 01 ' (r 21(g) -r11(g)) -e 02 ' ((g)
r 22 -r12(g))]
(5.224)
m p ('
,
. -'
. ,
. ')
+41t-r
sln'Z'1l-sm'21-s1n'Z'12+s1n'Z'22
Ab
With these relations, together with Eqs. (5.213)-(5.217), some algebraic manipulation leads to a relation between phase shift and particle diameter
- l+m -m.[i ~1-sinlf/r
sin~+coslf/r cos9r cos~ )
2
(5.225)
This relation was also first given by Flögel (1981).
A similar procedure can be used to derive the relations for higher order scattering modes. For the refractive mode, simulated signals are shown in Fig. 5.47
and the phase diameter relation in Fig. 5.48.
5.3.2.3 Phase Conversion Factors
In summary, the approximations used to deriveEqs. (5.221) and (5.225) are as
follows:
• The incident waves can be considered plane around the particle (e~~br = eb ).
• The distance to the detector is much larger than the particle diameter
(ror » d p , e~~l,
'" ep,)'
• The detectors are positioned symmetrically about the y-z plane (lf/l = -If/ 2'
91 = 92)'
• The particle is symmetrically positioned with respect to the detectors, i.e.
near the coordinate origin (e pr =e or )'
Und er these conditions the position and time-independent phases on each receiver are half the phase difference
A,ffi(N)
,ffi( N) _ _LJ_'#_1_2_
':PI
,
2
A,ffi(N)
,ffi(N) _ _ _
LJ_'#_12_
'#2
-
(5.226)
2
For a configuration with 19= 7deg, 9r = 30deg, If/r = 3deg, signals for reflection (N = 1) and first-order refraction (N = 2) have been simulated and shown
in Fig. 5.47. For reflection and for a positive velocity (v x > 0), the phase difference LldJ\Y is positive (LldJW > 0, LldJW < 0), meaning the signal at detector 1
leads the signal at detector 2 (Fig. 5.47a). For refraction, the phase difference
LldJW is negative (LldJg) <0, LldJi~) >0), i.e. the signal at detector llags the signal at detector 2 (Fig. 5.47b). The relation between particle diameter and phase
difference (Eqs. (5.221), (5.225» is shown in Fig. 5.48 for reflection and for firstorder refraction.
5.3 Particle Sizing with Phase Doppler and Time-Shift Technique
b
a
-
253
1.0
~
Reflection
-;::/
;
(N= 1)
0.5
..
,," ':
,' ,
(0
t::
b.O
Vi
'
..,
First-order
Receiver 1
Receiver 2
,, ,,
,, ,,
",
0.0
, refraction
(N= 2)
"
,," ,,
I,
I,
' ,
,, ,
,' ,
: '
,,
.,,
,,
,,
, ,,
,
,,
-0.5
,'
,, ,, ''
, ,'
"
"
:',, """,
.
-1.0
-20
-10
0
-10
10
0
10
20
Time t [flS]
Time t [flS]
Fig. 5.47a,b. Example of the modulated part of phase Doppler signals (e= 7 deg,
Ab =488nm, d w =20J..Lm, dp =6J..Lm, m=1.33, v p =lms- 1 , fjJ,=30deg, 1f/,=3deg).
a Reflection, b First-order refraction
0:0
"
~
270
SOl
'1
"
"...
~
180
u
t::
'-'-'
- - Reflection (N =1)
90
'6
~
..c:
'"
A.,
0
............
-90
---'- .. .................. -
------ First-order refraction (N= 2)
... - ...... ............
--- --- --- ...........
---
............
-180
"-- ... ...........
..........
-- -...........
-270
0
10
20
30
Particle diameter dp [flm]
Fig. 5.48. Example of phase difference as a function of particlc diameter computed using
geometrical optics from Eqs. (5.221) and (5.225) (e=7dcg, A b =488nm, m=1.33,
fjJ, = 30 deg, If/, = ±3 deg)
The particle diameter using the phase Doppler technique follows from Eqs.
(5.221) and (5.225) for reflection and first-order refraction respectively. The
constant giving the slope between phase difference and particle diameter and
including the system dependent parameters is normally combined in the phase
conversion factor
254
5 Signal Generation in Laser Doppler and Phase Doppler Systems
(5.227)
with
F~l) = :~ [J2( ~1- cos V/r cosf/J rCos'J'i + sin V/r sin 'J'i
(5.228)
-~l-cosV/r cosf/Jr cos'J'i-sinV/r sin'J'i)r
for reflection and
F~2) = :~ [2(
1+m 2- m J2
~1 + sin V/r sin'J'i + cos V/r cosf/Jr cos'J'i
- l+m 2 -mJ2
~l-sinV/r sin'J'i+cosV/r cosf/Jr cos'J'i
)r
(5.229)
for first-order refraction. The particle size can be calculated by multiplying the
measured phase difference with the phase conversion factor. For illustration, the
phase conversion factor is always positive, therefore the magnitude of the phase
difference can been used to obtain the particle diameter.
(5.230)
5.3.3 Reference Phase Doppler Technique
As in the reference-beam laser Doppler technique, the detectors of a phase Doppler system can also be used as reference-beam detectors in the laser beams. For
such a reference phase Doppler system, illustrated in Fig. 5.49, the phase difference I diameter relations from Eqs. (5.221) and (5.225) are not valid because the
e<
E.,
Beam
I
k,
Fig. 5.49. Reference-beam phase Doppler arrangement
5.3 Particle Sizing with Phase Doppler and Time-Shift Technique
255
signal is generated by the interference of only one scattering wave and the reference beam .. By using the reference detectors in the illuminating beams, the
dominant scattering order is first-order refraction for transparent particles. For
opaque particles reflection dominates in forward scatter. Phase difference I diameter relations for reflection and first-order refraction will now be derived.
5.3.3.1 Reflection (N
=1)
The AC part of the Doppler signal on receiver r arises from the superposition of
the reference-beam (b = r) field strength
g~r)
= Eb (ror> cos[ (Ob t + \Vb (ro,)J,
with the scattered wave from the other beam (r
(r)
E
_br
-
E(i)
br
exp[.J ( (Ob t + \V(i)
br
-
k
b =r
(5.231)
* b)
(g))]
b rp,br
(5.232)
,
The term \Vb(rOr ) in Eq. (5.231) gives the phase ofthe reference beam b at the
receiver r and \Vb~) in Eq. (5.232) is the phase of the illuminating (object) beam at
the incident or glare point (r6:~, = r6,1~ for reflection), as illustrated in Fig. 5.50.
Both phases can be computed using the equation for a laser beam, Eq. (3.59) and
a transformation between beam and main coordinate system as given in Eq.
(5.7).
The AC part of the intensity at receiver r =1, which is relevant for velocity
and diameter measurements, is then given by (Eq. (5.179»
(i)
I 1 - E1 (r m )E 21(i) cos( -\VI (r m) + \V21
k b rp,21
(g))
(5.233)
(g))
+ k b rp.12
(5.234)
-
and at receiver r = 2 by
I2
-
E2 ( r 02 )E 12(i) cos ( \V 2 (r 02) -
(i)
\V12
x
BC81ll2
objcCI bca 111
k,~
z
Bcam 1
rcfcren.:e beam
Fig. 5.50. Signal generation with the reference phase Doppler for reflection
256
5 Signal Generation in Laser Doppler and Phase Doppler Systems
The phase difference between the two signals is given as
LldJ(1)
12
= dJ(1)1 -
dJ(1)
2
(5.235)
The phase lf/b: l of the object beam b at the incident and glare points rci:l,
can be approximated by
= rci,i:
(5.236)
with lf/ Ob being the phase ofbeam at the origin. The change of phase between the
glare point from beam band receiver fis given by
( )J2
l-~f(g).e
+ ( fo,tr
Q,br
Or
fOr
fOr
,
(5.237)
which for fOr »f~,t; reduces to
(g)
k b fp,br
'"
2n (
T
fOr - fO,br . eOr
(g)
)
(5.238)
b
The absolute glare point position can be replaced by the particle position and
the glare point position relative to the particle center. Because the receivers are
located in the laser beams, the wavenumber and the unit vectors to the receivers
can be substituted by the wave vector of the beams, which yields for the two receivers locations
(5.239)
For the condition fOr »lRb = nf; lAb (Rayleigh length), the phase of the reference beam at the receiver becomes
lf/b(fOr )'" lf/ob
n
-k b ' fOr +-,
2
b= f
(5.240)
where lf/ Ob is the phase of the reference beam at the origin.
Substituting Eqs. (5.236), (5.239) and (5.240) into Eq. (5.235) and setting
r~:l = rH l leads to the phase difference between the signals of reflected light from
a particle centered in the intersection volume (rop = 0, r6:11 = ri;!, r6:12 = rl(p)
(5.241)
Due to symmetry (9r = 0,
lf/ r
=
±%) , the relations
. e/
kbeOI . r21U) -- kbe02 . f12(;) -- -k 1. fl2(;) -- -k 2 . f 21(;) -- k bfp sIn
/2
(5.242)
hold, thus
(5.243)
5.3 Particle Sizing with Phase Doppler and Time-Shift Technique
257
where L1x is the usual fringe spacing in the virtual interference field.
This signal generation is physically pictured in 5.51. The interaction points
for reflection sampie the virtual interference fields of the two detectors at different positions. Due to symmetry arguments, the separation of the interaction
points corresponds direct1y to the diameter of the particle. The ratio of the partide diameter to the fringe spacing gives the phase difference between Doppler
signals in multiples of aperiod. In fact, for the case considered here (f/Jr = 0,
IfI r =±%), the path-Iength difference between the reference beam and the scattered wave from the object beam is equal to the difference between the two
waves scattered by the partide in the object beam. Thus, the expression for
phase difference in a standard phase Doppler arrangement (Eq. (5.221)) will give
the same diameter dependent term in Eq. (5.243). The additional shift of 1t accounts for the fact that a 1t /2 phase shift between the scattered wave and the
reference beam arises in the far field of a focused laser beam (ror »l Rb)' For a
homogeneous reference beam, this term would vanish. Examples of reference
phase Doppler signals in reflection mode are given in Fig. 5.54a,c.
x
Virlual
callered wavc
from bcam 2
10 receiver I
m~dsuremenl
Re.:eiver I
z
callcred wavc
from beam I
10 receiver 2
volum of re.:eivcr 2
Receiver 2
Fig. 5.51. Interpretation of the phase difference genera ted in reflection mode in the reference phase Doppler system
5.3.3.2 First-Order Refraction (N = 2)
The computation of the phase difference between signals on the two detectors
arising from first-order refractive scattering differs from the reflective case only
in the additional phase term
I
(ill_ 21t
- -21t
(g)
k brnr"br r n r br -rbr
Ab
--rn
Ab
d p Sin
. T,
br ,
bt:r
(5.244)
which accounts for the phase change when the scattered wave traverses through
the partide as pictured in Fig. 5.52.
The additional phase change can also be considered in Eq. (5.235) and for
first-order refraction the phase difference can then be written as
258
5 Signal Generation in Laser Doppler and Phase Doppler Systems
Receiver I
x
Beam 2
objecl bearn
z
Beam I
rderencc bcam
Fig. 5.52. Signal generation with the reference phase Doppler for first-order refraction
L1IP~;) = IP~2)
=
- IPi2)
-VI (rOI ) - V2 (rQ2) + v~i + v~l- kb(r;~il + r;~~) - kbm(r',21 + r"IJ
(5.245)
For a particle centered in the illuminated volume (rop = 0) the simplification
used in Eqs. (5.236) and (5.239) can also be applied to Eq. (5.245)
L1IPg) '" kbe OI
'
rit + kbe
02 • rl~) -
k l . ri~)
- kbmdp(sin r;l + sin r;J-n
- k ri;)
2 .
(5.246)
U sing the symmetry properties of the optical arrangement, this can be simplified
to
(5.247)
For small
e, Eq. (5.247) just corresponds to
I
I
(2)
2n
L1IP12
",--d2m-I-n
A. p
(5.248)
b
Also this result can be interpreted in a very physical manner, as illustrated in
Fig. 5.53. As the interseetion angle becomes small, the paths of the two refracted
waves and the phase of the reference beams all become very similar. The particle-size dependent term in Eq. (5.247) just corresponds to the optical pathlength difference between the reference beam and the scaUered beam in traversing through the particle. The additional phase shift of n again arises due to
the nl2 phase difference in theJar field ofa focused beam (rOr »lRb). This term
vanishes for a homogeneous reference beam.
5.3 Particle Sizing with Phase Doppler and Time-Shift Technique
x
259
ScaHered wave (rom
beam 2 10 receiver I
z
cat tcred "'ave from
bcam I to receiver 2
Fig. 5.53. Physical interpretation of the phase difference between reference phase Doppler
signals arising from fIrst-order refraction
5.3.3.3 Phase Conversion Factors
Example signals of a reference phase Doppler system for reflection and firstorder refraction and two different particle trajectories are illustrated in Fig. 5.54.
Figure 5.55 shows an example of the phase difference/diameter relation of a
reference phase Doppler system. Comparing Eq. (5.247) with Eq. (5.225) reveals
a significantly higher size resolution than a conventional phase Doppler system
(Strunck et al. 1994). A further investigation of reference phase Doppler characteristics is given in section 8.2.6.
The phase conversion factor for a reference phase Doppler system operating
in reflection mode can therefore be calculated from the phase conversion factor
of a standard phase Doppler system operating also in reflection mode but with
the reference system receiver locations. An additional phase difference offset of
180 deg is necessary. For the refraction mode the phase conversion factor differs
from that of a standard phase Doppler configuration and is unique for the reference configuration.
dp -O)
P<PR
_
-
p(N)(LJ,Q>(N)
<PR
12
LJ,x
2n
,
+ 180 deg)
(5.249)
(5.250)
5.3.4 Time-Shift Technique
The optical configuration of a system measuring the particle diameter with the
time-shift technique is similar to the standard phase Doppler configuration as
shown in Fig. 5.44. For the dynamic analysis of the time-shift technique, plane
wavefronts and a Gaussian beam intensity profile, as used in section 5.1.3, will
be assumed.
In contrast to the phase difference, the time shift of the signal is dependent on
the direction of the particle trajectory through the measurement volume also for
5 Signal Generation in Laser Doppler and Phase Doppler Systems
260
b
a
.,=!
Rcllcction
::;,
'"
"0
:l
"i:O:.
E
"'
"0:c.o
Vi
~ ~-r.-,,~-..-,,-r.-,,~~
.,
Rcllcct io n
;cop -
-60 f.1m
- - Receiver 1
------- Receiver 2
o
-40
Time
I
o
40-40
[f.1sJ
40
Time I If.1s I
Fig. 5.54a,b. Example of the modulated part of reference phase Doppler signals
(e=18.9deg, Ab =852nm, dwb=40l..tm, d p=20J..lm, m=1.328, vp=lms· I ).
a Reflection Zop = 0 J..lm, b First-order refraction zop = 0 J..lm, c Reflection zop = -60 J..lm,
b First-order refraction zOp = 30 J..lm
the case of plane wavefronts (see section 5.1.3.2). If all three velocity components were measured, v p' rp v and 13 v' the trajectory could be determined (Eqs.
(5.58) and (5.59». The time shift of the signals is based on the displacement of
the virtual detection volumes. It can be determined by the times t ACmaxl and
tACmax2 for the signal maxima on the receivers 1 and 2 (Eqs. (5.114)-(5.116».
L1 (N) _ (N)
t 12
- - tACmaxl
L1
(N)
(N»)_
x 12 _
-tACmax2 - - - - vx
(N)
(N)
X pACmax,1 -
X pACmax,2
(5.251)
Vx
The negative sign in the definition of the time-shift is used to guarantee that the
time-shift and the phase-difference are both positive for reflection and both
negative for first-order refraction. A conversion of the phase and time conversion factors can then be performed without respect to the sign.
5.3 Particle Sizing with Phase Doppler and Time-Shift Technique
261
~ 3600"".-"".-"".-"""""".-""".-"".-"""-.",,,
:S
>e.~ 1800
'1
~
...
<lJ
o
~
...................
~ -1800
'"
- - Retlection (N = 1)
--- -- --- .................
1l
~
-3600
-- --
------ First-order refraction (N= 2)
-----------
--
......................
-5400
.............................
-7200
---------------
5
15
10
20
25
Particle diameter dp [firn]
Fig. 5.55. Phase difference as a function of particle diameter computed using geometrical
optics fromEqs. (5.243) and (5.247) (19=18.9deg, Ab =852nm, m=1.328)
For arbitrary trajectories the time shift is given with Eqs. (5.101) and (5.102)
by
L1t
12 =-tACmax,l +tACmax ,2
(5.252)
+[
vp
~1+m2y +m z2
[1+m o/z+4)]
o/z
2
z
tan 2
cos
For small intersection angles, i.e. for a slight change of intensity along the
z dimension of the detection volume, the influence of the V z component of the
particle velo city can be neglected. The time shift is then given by
12 = -tACmax,l + t ACmax,2 =
L1t
Xl -X 2 +(Yl -
yJm
(2)
Vx
y
(5.253)
l+m y
For particle trajectories in the x direction (v p = v xex) Eq. (5.252) reduces to
(5.254)
262
5 Signal Generation in Laser Doppler and Phase Doppler Systems
If the position of the incident points for reflection, Eqs. (5.200)-(5.203) and
first-order refraction, Eqs. (5.214)-(5.216) are inserted into Eqs. (5.252) to
(5.254), relations between particle diameter and time shift can be obtained.
5.3.4.1 Reflection (N = 1)
For reflection and particle trajectories in the x direction, the relation between
time shift and particle diameter is obtained as (Albrecht et al. 1994, Borys 1996)
LU(1)
12
=_ L1x~;) =~[
Vx
2J2vx
coslf/r cos9r tanr:%+sinlf/r
~1-COSlf/r cos9r cosr:%+ sinlf/r sinr:%
cos If/r cos9 r tan r:% - sin If/r
(5.255)
]
~1-coslf/r cos9 r cosr:%-sinlf/r sinr:%
5.3.4.2 First-Order Refraction (N =2)
For refraction and particle trajectories in the x direction the relation between
particle diameter and time shift becomes (Albrecht et al. 1996, Borys 1996)
A (2)
d
[
L1t(2) __ ~_~
12
-
Vx
-2J2vx
C,-Sllllf/r
.
~l+m2-m~2(l+Cc+C,)~l+Cc+Cs
(5.256)
C, Hll'!V,
J
with
Ce
= cos ljI r cos9 r cosr:% , Cs = sin ljI r sin r:% , C, = cos ljI r cos9r tan r:%
(5.257)
In contrast, with the phase difference technique, which exhibits a 21t ambiguity with increasing particle size, the time-shift technique displays no similar
limitations. Thus, there exist no restrictions on the choice of larger detector elevation angles.
5.3.4.3 Time Conversion Factors
As for the phase Doppler technique, time-shift conversion factors can be defined
for converting the measured time shift into a particle diameter for particle trajectories in the x direction.
d = L1t(N) p(N)
p
with
12
T
(5.258)
5.3 Particle Sizing with Phase Doppler and Time-Shift Technique
p,0l
=2.J2v (
T
x
coslf/r cosrfJr
263
tan~+sinlf/r
~l-coslf/r cosrfJr cos~+sinlf/r sin~
==J-
----r==c=0=s=lf/=r=c=0=s=rfJ=r=t=an==!Ji=2=-=s=in=lf/===r
~l-COSlf/r cosrfJr cos~-sinlVr sin~
(5.259)
1
for reflection and
(5.260)
C, + sin IV r
~~r=1+=m==:=2-=m=;~2=(~1+=c=c~-~C~,)c~--;:l=+=Cc=-=C=,
)-1
for first-order refraction. Note that the conversion factors are independent of
the wavelength of the incident beams, which is not the case for the phase Doppler technique. Für symmetric receiver locations (lVI = -IV 2' rfJl = rfJ2) the time
shift of each signal relative to the particle position at x op = 0 is half the full time
shift between both receivers
(Nl
Llt;~l
t ACmax,2 = 2-
(5.261)
while still considering the sign convention of the time shift.
An example relation between time shift and particle diameter computed using geometrical optics is pictured in Fig. 5.57, For positive particle velocities
(v x >0), the time shift Lltlfl =-(t~21 -t::'~2) is positive for reflection (Lltj1l >0,
LltW < 0) and is negative for refraction (Lltg l < 0, Llt~il > 0). The signals received
on the detectors are givenby Eqs. (5.193) and (5.194).
Generally more than one scattering mode is present at the detectors at the
same time. The beam amplitude proflle could lead to a time dependent selection
of detected scattering order, depending on the trajectory of the particle. Such
effects are largely suppressed in the phase Doppler technique by choosing detector positions at which one scattering mode is always dorninating. If more
than one scattering order/mode is present, the detected signal may exhibit fractional signals. An example and application of such signals is given in sections
8.2.4 and 9.2.
The measurement volume displacement as a basis of the time-shift technique
is not only in the x direction, but also in the y and z directions. Computations of
the volume displacement using geometrical optics are shown in Fig. 5.58a. These
computations have been performed for both reflection and first-order refraction. Note that the volume displacement is opposite to the time-shift, whose sign
is defined in relation to the phase difference. For comparison, similar computations have been performed using FLMT and are also displayed in Fig. 5.58b. At
264
-
5 Signal Generation in Laser Doppler and Phase Doppler Systems
a
~
1.0
';::::,E
b
Retlection
""
I,
';::::,
'"c:
Receiver 1
Receiver 2
,
(N= 1)
0.5
t
Oll
efraction
(N= 2)
11
I,
••
11
I,
I,
"
I
I
11
I.
I
,.
" I, I I'"
r;;
"
I I
I I
0.0
'1
"
'. I
I, I
I I I
\
I' 11 .'1. I.
111 1 , 1 1 , "
I I I I I • I, "
1 1 11,1 "
1 1 11,1 "
11,1 "
"
.'
11
"
I,
'I
11
"
•
11
II
"
"
11
-0.5
11,.
11 I I
I I I I
11,1
11
"
1I
11
"
"
U
::
~
I,
-1.0
-40
-20
o
::'1,1:: ~
11
"
I,
"
11
"
~ ~
: I
-60
:! !: ::
:: :,::::
20
40
60
-60
-40
o
-20
20
40
60
Time t [fls]
Time t [fls]
Fig. 5.56a,b. Example of the modula ted part of time-shift signals ((9 = 7 deg, Ab = 488 nm,
d wb = 20 flm, d p = 40 flm, m = 1.33, v p = 1 m S-l, 9, = 30deg, /fI, = 20 deg). a Reflection,
b First-order refraction
- - Retlection (N = 1)
o - .............. -
". "
. ... - ..... ............
".
'"
............
First-order refracion (N = 2)
- ......... "
. ... - ......
'" '"
'" '"
" . - .........
- .......
" . -'.
Partic1e diameter dp [flm]
Fig. 5.57. Time shift as a function of particle diameter computed using geometrical optics
from Eqs. (5.255)-(5.257) ((9=7deg, 9,. =30deg, /fI, =±20deg, m =1.33, V x =1 ms- 1 )
small diameters, some additional scattering orders introduce small oscillations
into the relation; however, these would be smoothed out with a finite detector
size.Such oscillations, which disturb the linear relation between phase difference and particle diameter, can also be expected for the phase difference if more
than one scattering order contributes to the signal. An extensive discussion of
this effect in connection with the phase Doppler system is given in chapter 8.
5.3 Particle Sizing with Phase Doppler and Time-Shift Technique
iE
a
15,,-r,-,,-r'-rT-r'-rT-r'-rT-r~
265
b
:::1.
RC(]CCli o n
--01.--- 0---e--
Y"'Cmo
(I)
Z
Aemlln
- 150~~~~~~~~~~~1~5~~~~
5
Parliclc diamCIcr d p IlJml
First-ordcr refra ction
(I)
x ACrmr.1'
(\)
~
--~
10
(I)
xACmu
(2)
YACma
(2)
2ACrn4.~
15
20
Particlc diamcter dp IlJm [
Fig. 5.58a,b. Detection volume shifts (e =18.4 deg, 9, = 30 deg, If/, = ±10 deg, m =1.08).
a Reflection and first-order refraction computed using geometrical optics, b Computed
using geometrical optics and Fourier Lorenz-Mie theory for dominant refraction
Physically the scattered interference field moves across the detector surface
according to the particle movement, as pictured in Fig. 5.59 (see also the Moire
picture Fig. 5.64). The refractive mode leads to movement of the fringes in the
direction of the particle and the reflection mode leads to movement in the opposite direction. This fringe movement can be experimentally visualized (Schöne
1993).
Fig. 5.59. Interference fringe movement in the plane 9, = 30 deg for reflection and firstorder refraction for a particle moving in positive x direction. The white lines are added as
reference lines at a constant angular direction
266
5 Signal Generation in Laser Doppler and Phase Doppler Systems
5.4 Refractive Index Determination
The phase difference and time-shift for reflection depends only on the particle
diameter for a given optical configuration. With this known particle diameter
and an additional phase difference or time-shift measurement from a higher
scattering order, e.g. first-order refraction, Eqs. (5.225) or (5.256) can be solved
for the refractive index. Such measurements demand that each phase-difference
and time-shift ofthe different scattering orders can be determined.
One solution could be to use one phase Doppler system in a scattering region
of dominant reflection and the second one in a region of dominant refraction.
However, due to the complexity ofthe scattering function (see section 4.1), both
scattering orders are seldom dominant in different scattering angle regions.
A second solution is to separate the scattering orders inside of one signal. Because the sign ofthe time shifts ofreflection and first-order refraction are opposite, both signal parts can be separated temporally by using measurement volurne diameters smaller than the particle diameter. For the system in Fig. 5.44
and a main flow direction parallel to the x axis, receiver 1 detects first reflection
and than first-order refraction. For receiver 2 the sequence of the scattering orders are reversed. Therefore two time-shift measurements can be performed.
With the known particle diameter from reflection, the refractive index of the
particle can be determined from the first-order refraction measurement
~ ~cos'l'r cosrjJr cos'% + 1 +~w+ cos'l'r cosrjJr cos,%-l
m "" v 2~---------'-------'------2-w
(5.262)
with
•
2
w=2d2
sm 'l'r
P(VxLltg))\l+ cos'l'r cosrjJr cos'%)
(5.263 )
By using a shifted phase Doppler system, the main flow direction of the system in Fig. 5.44 could also be parallel to the y axis. Both receivers are located at
the same off-axis angle and therefore both receivers detect first reflection and in
the second signal part first-order refraction. The like scattering orders appear at
the same time at both receivers and therefore temporal separated phase difference measurements for reflection and first-order refraction can be performed.
By again using reflection for particle diameter determination, the refractive index can be extracted from the second phase difference (Onofri et al. 1994)
m""
J2 ~cos,%cos'l'r cosrjJr + 1 +~2w+ cos'% cos 'l'r cosrjJr-1
2
1-w
(5.264)
with
(5.265)
5.5 Maire Models
267
Both techniques are based on the temporal separation of at least two different
scattering orders and are therefore known as dual-burst techniques.
A third possibility to deterrnine the refractive index is the extended phase
Doppler technique (Durst and Naqwi 1990). For this, two two-detector phase
Doppler systems with different off-axis angles are used. The receivers are positioned such that first-order refraction dominates. The ratio of the two independent phase difference measurements is no longer a function of the partide diameter and therefore only a function of the refractive index
.(j(P~)
AlP~)
""
sin If/A
sin If/B
The equation can be solved for the refractive index
(5.267)
A =(AlPA Sin1f/B)2 JA
,p
AlP B sinlf/A JB
Important to note is that the extended phase Doppler technique can operate
with plane waves and only one dominant scattering order (N > 1) in comparison
to the dual-burst techniques. However, it requires an additional two-detector
phase Doppler receiving optics.
A more detailed analysis of the dual-burst techniques and the extended phaseDoppler method is given in sections 8.2.4 and 8.2.5.
5.5 Moire Models
Moire fringes can be used quite effectively to illustrate the working principles of
both the laser Doppler and the phase Doppler measurement principles (Durst
and Stevensen 1975). For this purpose, the description of the laser beam phase
fronts as given in Eq. (3.59) and Fig. 3.5 and thescattered wave with Doppler
shift as given in the Eqs. (3.91)-(3.93) and in Fig. 3.7 are used. The Moire models
allow the phase relationships to be visualized.
In Fig. 5.60 two modeled laser beams intersect at their waists. Horizontal interference fringes are observed in the intersection area, corresponding to the energy density fluctuations in space, which are sampled by small scattering partides as they pass through the volume. If the intersection angle is varied then the
fringe spacing and the fringe number varies correspondingly. The Moire model
of interference is also appropriate to demonstrate systematic errors arising from
a poor layout of the transmitting optics when the two waists of the laser beams
are not located at the intersection point (Hanson 1978). This is illustrated in the
smaller images in Fig. 5.60 and further discussed in sections 5.1.2.1 and 7.2.4.
268
5 Signal Generation in Laser Doppler and Phase Doppler Systems
Misalignment: Opposite waist dislocation,
Fringe distance variation in x direction
Misalignment: waist dislocation,
Fringe distance variation in z direction
Fig. 5.60. Interference pattern observed in the interseetion volume of two laser beams for
a perfectly aligned system and two misaligned systems
If a scattering center moves with the velocity v p through the interference
field, then the partide acts as a source for scattered waves, whose frequency and
wavelength variation is given by Eq. (2.3), depending on whether the detector
and source are moving towards each other or away from each other.
For small partides, the middle of the partide can be considered the source of
the scattered wave, whose amplitude is modulated by the Doppler frequency. In
the case of two illuminating beams from different directions, the Doppler frequencies detected by a receiver are slightly different. A superposition of the
scattered waves yields a visualization of the Doppler difference method, Fig.
5.61. If the two scattered waves are temporally moved relative to one another,
then the signal generation can be demonstrated.
For small partides, the interference fringes shown in Fig. 5.60 are the source
of the scattered wave and the waves shown in Fig. 5.61 are the result of the scattering.
Figure 5.62 illustrates the reference-beam operation, in which the scattered
wave is superimposed with one of the laser beams. It is dear from this representation, that there are constraints on the positioning of the detector surface
within the region of coherence (see section 5.2.2). Shifting the two patterns over
one another again illustrates the signal generation and the wave generated from
the two patterns moves towards the detector.
For large particles, the interference model is no longer valid. In this case individual interaction points on the partide surface can be distinguished for each la-
5.5 Moire Models
269
In.:idenl
h"lInis
Wavc1cnglh of Ihc wlIve
wilh Ih" frcqucn.:y diITerem;c
Fig. 5.61. Superposition of scattered waves from a small particle (Doppler difference
method)
S.:allcrcd wav
Fig. 5.62. Superposition of a scattered wave with one of the laser beams (reference-beam
method)
ser beam. Their position depends on the position of the detector as weIl as on
the dominating scattering order, typically reflection or first-order refraction.
The superposition of the two scattered waves from the same scattering order
now takes place on the detector surface. Figure 5.63 illustrates two glare points
on the surface of a large particle, arising from e.g. first-order refraction. These
two points are then treated as the source of two scattered waves, which generate
interference fringes in space.
270
5 Signal Generation in Laser Doppler and Phase Doppler Systems
Small partidc
Largc paniclc
Fig. 5.64. Superposition of two scattered waves with different source points (glare points)
for illustration of size dependent phase difference between two spatially separated receivers
Because the positions of the glare points depend on the scattering angle, the
source points of the scattered waves depend on receiver location. The interference fringe system in Fig. 5.63 is therefore only valid in a sm all angular region
indicated by the white lines.
If the partide moves, the two scattered waves emitted from the glare points
have slightly different frequencies. The more complex Moire model, illustrated
in Fig. 5.64 is in practice only valid in the direction of observation, again indicated by the two white lines. For a receiver with a different location the glare
point positions change and a different Moire model appears. If the two scattered
Fig. 5.63. Superposition of two Doppler shifted scattered waves with slightly different frequencies from a large particle (phase Doppler technique)
5.5 Moire Models
271
waves are moved relative to one another, then the fringes move across the surface of the detector and generate the modulated part of the phase Doppler and
laser Doppler signal.
274
6 Signal Detection, Processing and Validation
Technique/
Device
Analog
spcctrum
analyzer
I Domain IRemarks
Spectral
Very inefficientbut
a\'ailablc atthe lime of
first laser Dopplcr
systems
Tracker (Phase Spcclral Opcralcs allow SNR
or [requency
bul requires high dala
ra le (e.g. liquid nows)
lockcd 1001')
f'eriod liming
dcviccs
(Counter)
Time
BurSI/Real time speclru m
anal)"lcr
Speclral Exploils roDuslness of
I'I'T and benefits from
spcclral dornain
ana lysi
AuIO corrcla tion I
Au IOcova rian..:c
Corrcla- Exh ib ils similer
bcncfits 10 bursl
ti n
spcclral analyzers
Quadrature
demodu lalion
Time
Model
parameter
eSlimalion
I Reference
I Iigh Da ndwidlh out
sen ilive 10 NR.
Widcspread use inl o
1990s
Signa l phase
information is more
n."adily availablc but
rcqu irc highcr SNR
lmplcmcnlcd in
and operalc
Correla- on digilized burst
lion.
Time
I Spcctra l
Deighton and eylcs
(1971)
Ladi ng (1987),
Meyers end lemons
(t 987), Ibrahim and
Bachalo (1992)
Ladin g and Andcr cn
(1988), Na kajima and
lkcda (1990), Jensen
(1992)
Agnlwal (1984),
Czars kc 1'1 al. (1993),
Müller el al. CI 994)
Nobach (1999)
: SOftwdfC
Fig. 6.1. Chronological sequence of major signal processing developments for laser Doppler and phase Doppler systems
rameters from the statistical functions, e.g. power spectral density, according to
a given algorithm. The iterative procedures optimize the estimated parameters
further by minimizing the difference between the model signal and the measured signal. This optimization can be performed in time, correlation or spectral
domain. Iterative methods of signal processing are presently not widely used;
however, their potential is large and the growing speed and flexibility of digital
signal processors will enable these methods to be implemented efficiently. Such
methods will be discussed in more detail in section 6.5.
6.1 ReviewofSome Fundamentals
275
ignal Proce sing
I\lean, variancc
Au tocorrclalion
funetion
Power peet ral densit y
Correlalion domain
I'requency domain
Frcqucncy
Phase
Arriva l time
Residen e time
Amplitude
Fig. 6.2. Classification of signal processing methods
As seen from this preliminary discussion, most contemporary processors are
based either on the power spectral density (PSD) or on the autocorrelation
function (ACF) of the Doppler signal. Therefore, a brief review of spectral analysis and so me basic fundamentals of signal processing will be given before continuing with adescription of specific processor concepts.
6.1 Review of Some Fundamentals
Spectral analysis in laser anemometry typically refers to analysis using the discrete Fourier transform (DFT), although not exclusively. Other transforms have
been employed, including Walsh, Wigner, Hilbert or wavelet analysis; however,
to date these are not widespread in commercial instruments. Furthermore, all
spectral analysis is now performed digitally, using between 1 and 8 bits for amplitude resolution. There are some principallimitations to processing sampled
data with I-bit resolution (H0st-Madson and Andersen, 1995), especially at
lower SNR (Domnick et al. 1988, Ibrahim et al. 1991); however, in practice these
are not too severe. Indeed the induced errors are usually smaller than from
other sources in the system and it is probably more important to concentrate on
maximizing the number of sampies in the signal (Ibrahim et al. 1994). Moreover,
the speed advantage of using fewer bits is rapidly diminishing with the introduction of faster hardware components.
The following sections provide an introduction to signal processing fundamentals for both spectral analysis and for estimation of statistical parameters
from signals.
276
6 Signal Detection, Processing and Validation
6.1.1 Oiscrete Fourier Transform (OFT)
The DFT of a finite series of eomplex values ~n = x(t = n At,) (n = O,I, ... ,N -1),
sampled at equal time intervals and over the time duration 0::::; t < T = NAt s ' is
defined as
k=O,I, ... ,(N-l)
(6.1)
and its inverse transform as
n=O,I, ... ,(N-l)
(6.2)
where n is the data sampie index at time intervals of Ats and with the eorresponding sampie frequeney of is. The speetral coefficients are computed for the
equally spaeed frequencies given by
fk
=_k- = k is, k = 0, 1, ... , (N -1)
NAt s
N
(6.3)
The frequency spacing of the resulting Fourier eoeffieients is therefore
(6.4)
This is also the lowest frequeney that ean be resolved. Note that the eapital and
smaliletter notation will be used for frequeney and time domain respeetively.
The Fourier transform yields eomplex speetral values. The real part is associated with the eosine funetion and the imaginary part with the sine funetion.
Thus, the real part represents contributions to the signal whieh are symmetrie
about zero and the imaginary part deseribes the asymmetrie contributions.
The power speetral density (PSD) is given by the squared magnitude of the
speetral coeffieients
This funetion is symmetrie about k = N /2. It represents the distribution of the
total signal power between the frequeneies 0 and is. An alternative representation is the use of negative and positive frequencies. For this ease, all values of
k;:>: N /2 are interpreted as negative frequeney values and the speetrum is symmetrie about k = o. In this ease, the funetion is known as the two-sided speetrum. The one-sided PSD simply eonsiders the speetral distribution up to
k = N /2 and is given by
6.1 ReviewofSome Fundamentals
277
Note that the power of the signal is not the same because i = 0 is also doubled
(No bach et al. 2000).
The term density is used because power per frequency bandwidth Ai, is being
considered. The maximum resolvable frequency is half the sampling frequency
Imax = I, /2 = IN/2 (Nyquist frequency) and the resolution is determined by the
data set duration Ai, = 11 T. Graphically the PSD and the parameters involved in
computing it are shown in Fig. 6.3.
Two properties of the DFT deserve particular attention for laser Doppler applications. Since the time between the sampie points is not infinitely small, the
120wer in the signal at frequencies above imax will appear in the PSD at lower
frequencies, an effect known as aliasing. This falsifies the spectrum at the lower
frequencies. An example of aliasing is given in Fig. 6.4. The signal in Fig. 6.4a
contains two frequency peaks at 2.4 Hz and 9.5 Hz, as can be seen in the correct
spectrum illustrated in Fig. 6.4a. By sampling the signal at 15 Hz, the maximum
resolvable frequency is 7.5 Hz and thus, the Nyquist criterion is not fulfilled for
the signal power at 9.5 Hz. The spectral portion above 7.5 Hz is mirrored about
the Nyquist frequency and results in a additional peak at 5.5 Hz (Fig. 6.4b).
Furthermore the signal noise at frequencies above imax also increases the noise
level at frequencies below imax.
Aliasing errors in estimates of PSD are avoided by applying an analog antialiasing, low-pass filter with a sharp cut-off at half the sampling frequency. This
procedure is illustrated in Fig. 6.5, using the same signal as used in Fig. 6.4. Before sampling the signal, a low-pass fllter removes the frequencies high er than
the Nyquist frequency imax (Fig. 6.5b). The spectrum of the flltered and sampled
signal in Fig. 6.5c contains no additional frequency peak. Furthermore, the noise
level is reduced to the same level as in the original signal in Fig. 6.5a.
Due to the equally spaced sampling of the input data set and also due to the
equally spaced coefficients of the spectrum, a periodicity every N sampies is inherent in Eq. (6.1). This effectively means that the DFT perceives and acts on an
infinite juxtaposition of the input data record and the inverse DFT effectively
Power spectra l densily
(PSD)
Nyqu ist frequcncy
Ar
_
~"12 -
I
_
f.
2 1,-2"
Fig. 6.3. The power spectral density and the sampling parameters
278
a
6 Signal Detection, Processing and Validation
.
Original signal
Analytical spcctrum
3()
o ~
,j
Eq ualI)' !13Ced Sam\l1CS 1111 11
111111 11111111
111111 J J J j j
bÄ
t
+.
&.
---'--.'---~~.-r:>-tl'~~
••
..0
,0
f 11 lzl
PSD X
Sampled signal
o
I
o
..
I
"()
DislurlJing
frcqucnc)'
and noi e
c:::>
151
yu~~~~~~~~~~~~-:~
o
10
f IHzl
Fig. 6.4a,b. Aliasing error in spectrum due to signal frequencies occurring above the Nyquist frequency. a Original signal and spectrum, b Sampled signal and falsified spectrum
transforms an infinite juxtaposition of the spectrum. This is illustrated in Fig.
6.6 for a time series.
If the beginning and end of the record do not merge smoothly into one another, sudden amplitude jumps are perceived, which give rise to additional frequency components in the spectrum. These 'end effects' are unimportant for records oflong time duration; however, they deserve attention with short records,
as encountered with the laser Doppler technique when measuring high speed
tlows or with small measurement volumes. These effects are diminished by applying window functions in the time domain. Window functions scale the input
data amplitude and force a tapering to zero at the beginning and end of the signal (Marple 1987). If an entire Doppler burst signal is centered in the digitized
data record and has approximately the same duration as the data record, then it
forms its own (Gaussian) window, since its amplitude begins and ends near
zero. This represents an ideal sampling case. If only short intermediate segments
of the burst are acquired and processed, then a windowing in the time domain
may be necessary.
A further consequence of a finite input record duration is spectral broadening. A spectrum of an infinitely long sine wave is adelta function at the signal
frequency. A finite length sine wave yields however a broadened peak, in which
the peak width is inversely proportional to the input signal duration. This process is graphicallyillustrated in Fig. 6.7. The spectrum of an infinite sine wave is a
delta function at the signal frequency (Fig. 6.7a). A finite duration sine wave can
be viewed as the product of an infinite sine wave with a rectangular window of
6.1 ReviewofSome Fundamentals
PSDY,
Original signal
~()
1 I
Isl
o
Low-pass filtered signal
AnalyticaJ spectrum
Signal
frcqucncy
c=:::)
PSDY.
279
Disturbing
frcquc ncy
10
5
J
[llz l
Low-pass filtered spcctrum
Signal
frcq ucncy
0
/
-I
111111 Illll
Equally spaced sampies 111111
lllll 1111111111
Low- pass cut-off
frcqucncy
0
5
10
f IlIzl
0
5
10
f IHzl
.• . .
.
,.
..
w·
~
,
0
00
-I
Fig. 6.Sa-c. Elimination of the aliasing error by use of a low-pass, anti-aliasing filter.
a Original signal and spectrum, b Low-pass filtered signal and spectrum, c Sampled signal
and non-aliased spectrum
x
Fig. 6.6. Implicit periodicity of acquired signal when processing using the finite length
DFT
duration T (Fig. 6. 7b). The speetrum of the finite sine wave will therefore be the
eonvolution of the delta function with the magnitude of a sine funetion, the
280
a
6 Signal Detection, Processing and Validation
Time domain
Frequency domain
-00
~
Time
o
b
X
i
Jo
® Co~volution
Multiplication
PSD
o
Time
Frequency
Frequency
c
PSD
Time
o
Jo
Frequencl'
Fig. 6.7a-c. A multiplication of two signals in the time domain is equivalent to a convolution in the frequency domain. This can be used to explain spectral broadening due to finite record lengths. a Infinite sine function and related spectrum, b Rectangular function
and related spectrum, c Finite sine function and related spectrum
transform of a rectangular window (Fig. 6.7c).
This can be easily illustrated using the following relations. If a signal y(t) is
given in the time domain as the product of two other signals, x(t) and h(t)
y(t) = x(t) h(t)
(6.7)
then the Fourier transform of y(t) is given by the convolution of the Fourier
transforms of x(t) and h(t) (Bendat and PiersoI1986).
I(f)=2{(f)®H(f)= J2{(a)H(! -a)da
(6.8)
The power spectral density of y(t) is then
2
,
Gk =--YkY k
N!s- -
,
k=O,1, ... ,N!2
(6.9)
6.1 ReviewofSome Fundamentals
281
An obvious consequence of spectral broadening is that the resolution of distinct signal frequencies in the PSD can be improved by sampling a longer portion of the signal. However, in the laser Doppler and phase Doppler techniques
the signal duration is limited to the transit time of the particle through the
measurement volume. This transit time, which is inversely proportional to the
flow velo city, will ultimately limit the accuracy of the frequency estimation. In
fact, this is a manifestation ofHeisenberg's uncertainty principle. The product of
signal observation time and frequency resolution will be constant.
T.1f =1
(6.10)
In practical implementations of the DFT, Eq. (6.1) is not used directly but
rather a recursive form known as the fast Fourier transform (FFT) is used. There
are many realizations of the FFT, but they share one feature in common, namely,
that they normally operate on 2" points l : sampie records are restricted to values
such as 16, 32, 64, 128, .... The calculation time of the DFT implemented with
Eq. (6.1) increases with N 2 • The FFT algorithm reduces the computation time to
the order of NlogN.
A commonly used technique with the FFT is that of zero padding. Without
changing the spectral content of the signal, zero padding forces the FFT algorithm to estimate the spectrum at additional frequencies between zero and fmax'
thus improving the resolution. This is easily seen by exarnining a signal doubled
in length by adding zeros. Instead of Eq. (6.1) the transform becomes
2N-l
(2nnk)
K.k= L!.nexp - j - - ,
n=O
2N
However, since !.n
k=O,I, ... ,(2N-l)
(6.11)
= 0 for n = N, N + 1, ... ,(2N -1), this can be written as
(. 2nn(k/2)] '
Kk -_ ~
~!.n exp -J
n=O
k=O,I, ... ,(2N-l)
(6.12)
N
which is identical to the N-point transform for every other k value. However now
Kk is computed also at intermediate k values. The spectral content of the signal
has in no way been altered, but with the intermediate estimates, interpolation of
peak locations can be improved. Zero padding can also be used to extend input
data records up to a length of 2" values, in preparation for an FFT.
6.1.2 Correlation Fundion
Principally, the information available in spectral domain is also available in the
correlation domain, since the autocorrelation function R( r) forms a Fourier
transform pair with the power spectral density (Wiener-Khinchine relation). In
digital form this can be expressed as
1
Algorithms exist for FFTs using other record lengths, especially prime number decompositions; however, these are not in widespread use.
282
6 Signal Detection, Processing and Validation
fs
L
N/2-1
(
•
21tnk)
Rn =R(r=n.::1r)=G1k1exp +J-2N k=-N/2
N
f ( Go +(-1)"G
=_s
2N
N /2
+2 L G eos (21tnk)J'
-k
2
L
N/2-1
R1n1ex
s n=-N/2
2(
=- Ra +(_1)k R N ' 2
fs
(6.13)
k =O,1, ... ,N/2
(6.14)
N
k=1
Gk=G(j=fk)=-j
n=O,1, ... ,N/2
N/2-1
~
.21tkn)
-J-N
(21tkn)J '
+2 L Rn eos - - N/2-1
n=1
N
where Llr = Llts is the time lag interval. The autoeorrelation function is by definition symmetrie about r = o. With the mean removed, the autocorrelation
funetion is known as the autoeovarianee funetion; however, these two terms will
be used interehangeably, always assuming a mean-free input signal.
The eorrelation function ean also be eomputed direetly using the estimator
(6.15)
A eomputation of Rn using the FFT, first to compute the PSD and then to transform to the eorrelation domain, exhibits a speed advantage that inereases with
inereasing data reeord length (NlogN eompared to N 2 for a direet ealeulation
of the eorrelation funetion). However, there are some subtle differenees between
the estimate of Eq. (6.13) and that of Eq. (6.15). The most important of these is
the so-ealled 'wrap-around' error (Bendat and Piersol 1986), whieh has its origins in the finite length DFT, Eq. (6.1). The inherent periodicity in time whieh is
implied by Eq. (6.1) and illustrated in Fig. 6.6, essentially means that the eorrelation funetion computed aecording to Eq. (6.13) assurnes an infinite juxtaposition of the input signal in time. The derived autocorrelation function will also be
based on this assumption and is, therefore, known as the cireular autoeorrelation. This error is avoided by first padding the input signal with zeros at the beginning and end of the original signal to double its length.
The autoeorrelation function will exhibit a periodicity at the same period as
the original signal. For instanee, the autoeorrelation of an infinite sine wave will
be an infinite eosine wave, as illustrated in Fig. 6.8a. Thus, the signal frequeney
ean be estimated by measuring the elapsed time over one or more zero erossings
of the autocorrelation funetion (period timing).
The autoeorrelation of a Gaussian windowed sine wave eentered around t = 0,
as shown in Fig. 6.8b, will yield as a eorrelation function a eosine wave with an
amplitude deeay direetly related to the window width. Of partieular interest is
the effeet of signal noise on the correlation funetion. As illustrated in Fig. 6.8e,
the eontribution of signal noise ean be found entirely in the first coefficient of
the autocorrelation funetion, i.e. at r = o. This is beeause the signal noise has no
inherent time seale, meaning that it is eompletely random and not eorrelated
with itself over any length of time. This last property of the autoeorrelation
6.1 Review ofSome Fundamentals
283
R(T)
AR + - - - - - "
x(t)
SNR=OdB
A+-----+A
Fig. 6.8a-c. Input signal and autocorrelation function. a Sine wave, b Noise-free Doppler
signal, c Noisy Doppler signal
function is particularly interesting for laser Doppler and phase Doppler signal
processing, because it provides a means of separating the noise effects from the
signal, thus, improving the estimation of signal frequency and other signal parameters.
6.1.3 Hilbert Transform
The Hilbert transform of a function x(t) is defined by
y(t)
=N{ x(t)} =.!.. Jx( r) d r
Tt_j-r
(6.16)
and is an integral transform, where the Cauchy principal value is taken in the
integral. The function y(t) is produced by passing x(t) through a filter with the
transfer function
H{J) = -j sgn{J)
(6.17)
A singularity exists at the value f = 0, which, however, does not cause any
computational problems. On the other hand, the infinite integral causes problems for signals that are not mean-free. Thus, when processing laser Doppler
and phase Doppler signals with the Hilbert transform, it is necessary to first remove the mean, either optically or electronically.
284
6 Signal Detection, Processing and Validation
The magnitude and phase of H(f) are
IH(J)1=1
(6.18)
arg{H(J)}=-lt sgn(J)
(6.19)
2
The inverse of the Hilbert transform is given by
(6.20)
So me typical examples ofHilbert transform pairs are given in Table 6.l.
A sampIe signal and its Hilbert transform are shown in Fig. 6.9. For a given
input signal x(t) the Hilbert transform is the signal y(t) which is shifted by
-90 deg in phase for all frequencies.
An analytical (complex) function for a given input signal x(t) can be defined
as
z(t)=x(t)+j K{x(t)}
(6.21)
which has spectral values only for frequencies larger than or equal to zero
(j ;::: 0). Its Fourier transform is zero for all negative frequencies, or in the discrete case for all frequencies f ;: : N /2. This analytical signal can be used to derive the signal envelope A(t) and the instantaneous signal phase rp(t).
A(t) = Iz(t)1
(6.22)
rp(t)=arg{ z(t)}
(6.23)
The envelope and phase of the Doppler-like signal from Fig. 6.9 are shown in
Fig.6.10.
Table 6.1: Some sampIe Hilbert transform pairs
N{ x(t)}
x(t)
y(t) =
const
ax l (t) + bX2(t)
defined as 0
aYI (t) +bY2 (t)
x(at)
y(at)
x(t - to)
y(t-to)
[x(t)x(t- 1") dt
[y(t)y(t- 1") dt
asinbt
acosbt
-acosbt
asinbt
1 1
1tt-a
J(t - a)
6.1 ReviewofSome Fundamentals
- - Original signal
--- --- Hilbert trans form
,"" :,
,,
,,
,,
,,
,,
,,
,,
,,
,,
,,
,
,\
,," ':,
,
,,
,,
,,
,,
,
o
,,
,,
1
1
1
1
1
1
1
t,
," ,,
,,
,,, ,
,
,,
,,
1
1
1
1
1
1
1
1
1
1
, ,,
1
1
1
1
1 1
11
.
1
1
1
1
I,
1
""
'.'
285
,
't
,'
""
Time[s]
Fig. 6.9. A sample signal and its Hilbert transform, illustrating the -90 deg phase shift
b
a
- - Original signal
-----Envelope,,. -_
,,
.,,
o
·1
Time[s]
Time[s]
Fig. 6.10a,b. a Input signal and computed envelope amplitude, b Instantaneous phase of
input signal
The calculation of the Hilbert transform for a discrete signal of finite length
xn=x(t=tn ), tn=nlfs' n=O,l, ... ,(N-l) can be performed in the frequency
domain using the Fourier transform 3 or its fast implementation, the FFT.
(6.24)
with
-j
bn ={ j
for
for
Os,n<N/2
N/2s,n<N
(6.25)
286
6 Signal Detection, Processing and Validation
The analytical signal defined in Eq. (6.21) can be obtained as follows
(6.26)
with
bn
={20
for
O.:;,n<N/2
for
N/2':;'n<N
(6.27)
These expressions are illustrated graphically in Fig. 6.11, in which the real and
imaginary Fourier coefficients of a real input signal are shown. The modified coefficients used in the inverse transform to obtain the Hilbert transform (Eq.
(6.24» are shown in Fig. 6.11a, and the modified coefficients used in the inverse
transform to obtain the analytical function (Eq. (6.26» are shown in Fig. 6.11b.
From this figure it becomes apparent that the Hilbert transform can be implemented using very simple operations in combination with the Fourier transform.
N
a
N
Im(5{ x(t)})
Im(b, S{x(t)})
Iiilbcrt
trans!orm.
1\ {x(t)}
Re(S{X(/)})
N
N
b
Im(S{ x(t)})
n
Rc(S{X(/)})
Re{b,S{x(t)})
Fig. 6.11a,b. a Fourier coefficients modified for the Hilbert transform, b Modified coefficien ts for analytical signal
6.1 Review ofSome Fundamentals
287
6.1.4 Signal Noise
There are several features of signals from laser Doppler and phase Doppler systems, which make their processing quite unique. Certainly the fact that the signals come at irregular and unknown time intervals, corresponding to the particle passage through the measurement volume, is important to consider. This
creates the need for signal detection to indicate when the processing should take
place or if the processed result is to be retained (validation). The task of signal
detection, and later of signal processing, is made more challenging by the presence of noise superimposed on the signal.
Noise is essentially any amplitude deviation of the signal from the analytic
form resulting from the signal generation analysis given in chapter 5. Sources of
noise are manifold, including stochastic noise coming from the photodetector
and electronics (shot noise, Johnson noise, dark current, see section 3.2.5) as
weH as from the scattering process itself. The laser may introduce signal noise,
especially laser diodes, which, if improperly stabilized, can exhibit modehopping (Dopheide 1995). Noise can arise from unwanted reflections associated
with the flow rig or other particles. Poor grounding of the experimental apparatus or poorly designed electronics may also lead to ground noise.
Expect for the last source, noise contributions in the system are usually considered to be spectrally white. This refers to the fact that the total noise power is
distributed evenly over all frequencies up to the upper bandwidth of the system.
Attempts to estimate this noise power usually concentrate on the noise arising
from the photodetector and its associated electronics. The power of signal fluctuations (J"; put into relation with the power of noise fluctuations (J"~ is known
as the signal-to-noise ratio (SNR) and is generally expressed in decibels:
SNR/ = +10 IOg( (J";
I dB
(J"2
)
(6.28)
n
Interestingly, the SNR can vary significantly, not only with the bandwidth of
the electronics, but also with the type of photodetector and with the signal intensity. This has been illustrated already in section3.2.5 (Fig. 3.26). An empirical
determination of SNR for various semiconductor detectors can be found in Dopheide et al. (1987) and Dopheide et al. (1990).
Generally, however, analytic expressions for noise yield only best case estimates, since any optical misalignment or electronic misadjustment can easily
become overwhelming in its increase of the noise level.
The SNR can be estimated from a given signal segment using various techniques and such an estimation is often used in the detection/validation step of
signal processing to indicate wh ether a result can be expected to be reliable or
not. This is discussed in further detail below.
In Fig. 6.12, a laser Doppler signal, a noise signal and the summation of the
two in time, spectral and correlation domain is illustrated. It becomes obvious
from Fig. 6.12 that the power spectral density (PSD) or the autocorrelation
function (ACF) offer exceHent means to monitor SNR and to determine whether
a particle signal is present or not.
288
6 Signal Detection, Processing and Validation
TImc (samplcd wilhj)
WhiteNoise
(Iow-pa s lillcrcd)
ign~l
Noisy signal
Spc<.1l"dl
cu.
(/)
c..
+
Ja
Frequency I
J
Correlalion
"-
"-
"- I.
<:
<:
~
+
-
U
U
cr;
0
Time lag
•
0
1:
o
t
Fig. 6.12. Representation of a laser Doppler signal, a noise signal and a combination of
the two in time, spectral and correla tion domain
An idealized graphical interpretation of SNR is given in Fig. 6.13, which shows
schematically the power spectral density (PSD) of a Doppler signallogarithmically scaled. The SNR is given by the ratio of the areas A to B. A more detailed
Cl
Vl
c..
o
-I
A
~
SNR = 1010g B
cr!/f.
0.01
B
I ~ __ ~ ~_~~_.~_~~~_~~~~~~~~~~J-
o
5
f
10
15
J:",
____- .
Frcqucncy Jla.u.1
k~----------~--------------------~
Fig. 6.13. Graphical representation of SNR using the power spectral density (PSD)
6.1 ReviewofSome Fundamentals
289
estimation procedure is given by Tropea (1989). The noise appears as a base line
floor of width L1f, the bandwidth of the system, and of amplitude O"~ I fs. Any
flltering of the signal, for instance using a low-pass fllter, will directly decrease
area Band thus increase the SNR, since more of the noise is removed. The use of
a band-pass fllter to increase SNR increases the reliability of the signal detection,
since the SNR acceptance threshold can be chosen high er. In contrast, the variance of the frequency estimation remains constant because the peak in the
spectrum still has the same width. Indeed, such adjustable input fIlters are usually an integral part of any Doppler signal processor. On the other hand there is
a danger in flltering with too narrow a bandwidth, since in general the signal
frequency is not known apriori. This can lead to truncation of the velo city distribution and to a bias of the estimated moments.
The SNR can also be estimated from the autocorrelation function. Noise, being fully stochastic and having zero correlation duration, appears only in the
first autocorrelation coefficient, i.e. R( r = 0)1. Thus, the SNR can be estimated by
comparing the amplitude of the autocorrelation function at r = 0 to the maximum peak amplitude of the remaining periodicity, exemplary shown in Fig. 6.8c
for a high-pass flltered burst signal with added noise. If the frequency of the periodicity f has already been determined, the amplitude of the signal AR (Fig. 6.8)
can be estimated by fitting a eosine wave to the measured correlation function at
points removed from r = o. This can be computed using the expression
A _ _ R.,...('--n_L1....:.r)----,R - cos(21tfnL1r)
(6.29)
from which the variance of the noise portion of the signal can be computed
(6.30)
The index n should ideally be chosen at the first maximum or minimum removed from r = O.
The SNR is then given as
SN%B = 1010g(
;~ J
(6.31)
The presence of noise in the signal can have both direct and indirect effects
on the measurement quantities. In the worst case, the scattering signal from the
particle may not be detected at all or a completely wrong frequency or phase estimate could be made from a noisy signal. However, noise may also effect estimates of signal duration, generally leading to an overestimation, which then influences the derived flow quantities in the data processing. In any case, noise
increases the variance of the signal frequency and phase estimates, regardless
which processing scheme is employed. Thus, noise at the signal processing stage
essentially determines the lowest resolvable level of measurable turbulence in a
1
The statistical scatter (errar) of the autocorrelation coefficients increases with SNR for
every Lir, given a finite number of sampies.
290
6 Signal Detection, Processing and Validation
flow. This level is known as the Cramer-Rao Lower Bound (CRLB), and is discussed in further detail in the following section.
6.1.5 Cramer-Rao lower Bound (CRlB)
(Contributed byH. Nobach)
The goal of analyzing an acquired signal is to derive several signal parameters
according to a given model representing the physical basis of the signal generating process. In laser Doppler techniques, this is either the Doppler frequency
corresponding to the velo city of the particle or the phase difference between two
signals, acquired from a phase Doppler system. In practical cases, the recorded
signals are equidistantly sampled and time limited, so that the amount of available information is also finite. Furthermore, the signal is influenced by noise
and this intro duces uncertainty into any parameter determined from the signal.
The calculation of signal parameters is therefore called estimation, since it contains a random component.
The true values of the parameters to be estimated are seldom known and different estimation algorithms (estimators) will also yield different results.
Therefore it is of interest to quantify the accuracy of each estimator statistically.
. To begin with, the expectation ofthe estimator should be equal to the true value,
i.e. non-biased. Second, the estimator should be efficient, meaning that it uses all
available information to estimate the required parameter as accurately as possible. In chapter 10, features of estimators are discussed in more detail. The efficiency of an estimator is quantified by its variance. While the bias should be
zero, the finite amount of information yields a lower bound of achievable accuracyand thus, a finite variance. For unbiased estimators this lower bound of
variance is given by the Cramer-Rao lower bound (CRLB) (Kendal and Stuart
1963, Papoulis 1988).
No unbiased estimator can obtain estimates with a variance smaller than the
CRLB, thus this quantity can be used to evaluate the performance of a specific
algorithm. On the other hand, the CRLB gives no information about how an algorithm should process a measured signal to reach this lower bound. However,
based on estimation theory, and closely related to the CRLB, the maximum likelihood (ML) estimator can be derived. If any unbiased estimator reaches the
CRLB, then the ML estimator will also reach it, at least asymptotically (Kendal
and Stuart 1963, Kay 1993).
For a signal
x{t=tJ=x; =m; +n;,
with
x=
i=O,I, ... ,(N -1)
l lj lj
Xl
.
Xo
X~_l
j
,
m=
mol
m.
m~_l
,
n=
nol
n.
n~_l
,
x=m+n
(6.32)
(6.33)
6.1 ReviewofSome Fundamentals
291
consisting of the model signal m of known type, the noise n and the unknown
(scalar) parameter a, the CRLB is given by
1
(6.34)
where p(x,a) is the joint prob ability density function, (section 10.1), of the
measured signal x for a given parameter a. Since a is normally a vector,
Eq. (6.34) is the inverse of a matrix, the Fisher information matrix J, whose typical element is given by
(6.35)
with
dlnp(x,a)
Ha
=
1
-:.
ua
j
'
(6.36)
The bound of the i-th unknown element of the parameter vector a is given by
the i-th diagonal element with index ii of the inverse Fisher information matrix
(6.37)
where no summation is implied. For uncorrelated and signal independent noise
with power O"~, and with a Gaussian distribution, the joint prob ability density
function p(x,a) becomes
(6.38)
and the elements of the Fisher information matrix become (Whalen 1971)
(6.39)
To derive the lower bounds for a given Doppler burst this can be calculated and
inverted, at least numerically.
As an example, the lower bounds for the estimation of the frequency OJ and
the phase (jJ will be derived. Since the parameter vector a must contain all unknown parameters, including those, which are not estimated (hidden parameters), a constant amplitude of unity during the observation time is assumed for
simplification. The time dependent signal
x(t) = m(t) + n(t)
(6.40)
292
6 Signal Deteetion, Proeessing and Validation
is eomposed of the model signal
m(t) = cos(mt+ tp)
(6.41)
and the time dependent noise n(t). The measured signal after sampling is
therefore
X;
=x(t=t)=cos(mt; +tp)+n;,
(6.42)
i=O,I, ... ,(N -1)
and each sampie is a function of the two model parameters x; (m,tp) and the
noise. The sampling times are given by t; = i I fs. The noise n is uncorrelated
and Gaussian distributed. The parameter vector is
(6.43)
a=(;J
The derivatives of the model parameter dependent sampies m;
dm
d~
d;
dm
= cos(ox;
+ tp) are
= -t; sin(mt; + tp)
(6.44)
. (
)
=-sm mt; +tp
(6.45)
The Fisher information matrix becomes
(6.46)
The inverse of the Fisher information matrix is
-~t; sin 2(mt; +tp)]
N-l
(6.47)
~); sin 2(mt; +tp)
j=O
As an example, a numerical simulation was performed for the (true) parameters m = 2, cp =1.1, fs =10 and N = 256. 1 The noise power was varied logarithmically in 25 steps from e-lO to eID, which corresponds to 25 equal steps of
SNR, expressed in dB.2 For each noise level, 1000 independent realizations were
generated. The individual signals were processed by aleast mean square estima1
2
For this and subsequent examples in this seetion, frequeneies have been nondimensionalized using 2n. Thus, for OJ = 2, fs = 10 eorresponds to IOn sampies per eyde.
The noise power has been normalized with the signal varianee, thus lJ; = I corresponds to SNR = üdB .
6.1 Review of Some Fundamentals
293
tion routine, which for Gaussian distributed noise is equal to the maximum
likelihood estimation. The Fisher information matrix and its inverse were calculated to be
1 (130
1653 )
J = O"~ 1653 28356
-1
J
= 0"2 (
n
0.029787 -0.001737)
-0.001737 0.000137
(6.48)
(6.49)
In Fig. 6.14a a sample signal with SNR = 15 dB is illustrated. The results presented in Fig. 6.14b show that the maximum likelihood estimator meets the calculated CRLB. Furthermore, a threshold noise power O"~max can be seen for the
frequency estimate. Above this limit, the noise dominates the spectrum and the
algorithm estimates the frequency randomly from the entire frequency range.
The frequency of the threshold depends not only on the signal characteristics,
but also on the capability of the estimation procedure to find the correct peak in
the spectrum. The phase range is limited by ±1t. Therefore, the variance of the
phase estimation is also limited.
In the case of phase Doppler signals, the Doppler frequency and the phase
difference between two signals
Xi
=
cos( OJti + qJx) + n xi
,
i = 0,1, ... , (N -1)
(6.50)
Yi
= cos( OJti + qJ y ) + nyi
,
i = 0, 1, ... , (N -1)
(6.51)
with independent noise components n x and n y are of interest. To derive the
CRLB for the phase difference, it is convenient to re-write these signals as
b
a
~ 10'
~
<U
"0
.0..e 1
C
'e'"
>
'"
Ei
c
«:
..8
11:'
'"
12
'~B
0
10-'
-1
o
5
10
15
Time [s1
10-' 'LL..u..u.....L...I..llW-.l..1.LL..J-LJULJ.j-LW...L.L.LI.L...l....LJ.JJL....L..I.JJJ
10-'
10-2
1 O:m~ 10'
10'
Noisepower [-1
Fig. 6.14a,b. Single-tone parameter estimation. a Sample input signal, b Comparison of
the CRLB with computed variance for frequency and phase estimates
294
6 Signal Detection, Processing and Validation
(6.52)
Yi =myi +n yi
=COS(lüti + I)? + AI)?) + n yi '
i=O,I, ... ,(N -1)
(6.53)
Since the signals are of the same length with independent noise components, the
joint prob ability density function p(x, y,a) now becomes
(6.54)
with
m xi =COS(lüti +I)?)
m yi
= cos( lüti + I)? + AI)?)
(6.55)
(6.56)
and the elements of the Fisher information matrix become
(6.57)
The vector of unknown parameters is
(6.58)
Note that I)? is included in the parameter vector since it is unknown, even
though it is not used. The derivatives of m x and m y are
om.
0;' = -ti sin(lüti + I)?)
om. = -sin(lüt. + I)?)
oI)?
,
om =0
__
x,
Xi
oAI)?
om.
o~' = -ti sin( lüti + I)? + AI)?)
om. = -sin(lüt + I)? + AI)?)
oI)?
,
om.
--y' =-sin(lüt + I)? + AI)?)
--Y'
oAI)?
,
(6.59)
(6.60)
(6.61)
(6.62)
(6.63)
(6.64)
6.1 Review ofSome Fundamentals
295
The Fisher information matrix becomes
(6.65)
with
N-I
= I/ sin 2 (mt; +tp)
Pk
(6.66)
i=O
N-I
Qk
=I l sin 2 (mt; +tp+Lltp)
(6.67)
j=O
The inverse of the Fisher information matrix is
(6.68)
As an example, a numerical simulation was performed for the (true) parameters m = 2, tp =1.1, Lltp = -0.8, fs =10 and N = 256. The noise power varied
logarithmically in 25 steps from e- Io to e+IO • For each noise level 1000 independent realizations were generated. The individual signals (Fig. 6.15a) were processed by a maximum likelihood estimation routine. The Fisher information matrix and its inverse were calculated to be
J
r
l
55536 3261 1608]
[ 3261
258 128
(5
n
1608 128 128
=.-;-
0.000070 -0.000894
[
= (5~ -0.000894 0.019063
0.000008
-0.007794
0.000008 )
-0.007794
(6.69)
(6.70)
0.015536
The results presented in Fig. 6.15b show that the maximum likelihood estimator meets the calculated eRLB. Again, a threshold noise power can be seen
for the frequency estimate and the phase range is limited by ±n. Note that the
eRLB and the empirically derived estimation variance of the phase tp and the
phase difference Lltp are different.
The expressions of the eRLB derived above are not convenient for practical
use in setting up a signal processor. Explicit expressions of the eRLB are required. To derive these, a set of two orthogonal signals with independent noise
components n and are considered.
n
Xi
= mi
+ ni
,
i = 0,1, ... , (N -1)
(6.7l)
296
6 Signal Detection, Processing and Validation
'.
"\
I
I
•
•
I
I
1
'I
I
t
::
o
I
I
I
:
:
:
I
I
t
~
,
,
,I
1
.'
I
t
','
I
I
I
~
:
I
I
I
!::::
::
I
I
:
:
:
I
I
\ {
.,8o:t5
I
I
I
\ f
I,
I
I
1
I
I'
I
~
'e~
:
1
!
o
: ~~
,
:. f
-1
:
~
..\
: '~
•
./
I
I
~ 10
Empirical
CRLB variance
, e"
4
?
•
I
i
10
5
./
.....
I
I
I
I
l
10-2
,5
15
10-' LL.Llll...L.L.LILL.U.lL.L....I.J..lL-L.Llll...L.L.LILL.U.lL.L...u..u
10-4
10'
10'
Time [sI
Noise power [-I
Fig. 6.15a,b. Single-tone parameter estimation from two orthogonal signals. a Sample input signals, b Comparison of the CRLB with computed variance for frequency, phase and
phase difference estimates
(6.72)
with
= Acos{wt; + lP),
i = 0, 1, ... , (N -1)
(6.73)
m; =Asin(wt;+lP)'
i=0,1, ... ,(N-1)
(6.74)
m;
where additionally the amplitude A is unknown. The joint probability density
function becomes
(6.75)
and the elements of the Fischer information matrix are
(6.76)
The vector of unknown parameters is
(6.77)
Using the fact that
explicitly as
m; + in; = A
2,
the Fisher information matrix can be expressed
6.1 Review ofSome Fundamentals
N-l
N-l
A2~)~
A2~>
;=0
0
i=O
N-l
J=_1 A 2L;t
(j2
n
297
N-l
j
A 2L;1
i=O
;=0
0
0
0
N
(6.78)
N(N -1)(2N -1) 3N(N -1)f,
A2
=-2-2 [
6(jJ,
3N(N-l)f,
6Nf,
o
0
2
The zero elements in this matrix indicate that the amplitude ean be estimated
completely independent of the frequency and the phase. Thus, the amplitude
ean be presumed to be known without eh anging the lower bounds of the frequeney and phase estimator varianee. The inverse of the Fisher information
matrix beeomes
r =
1
2
2
2
6Nf,2
-3N(N -1)f
[ -3N(N -1)f,
N(N -1)(2N -1)
2
(jn 2
AN (N -1)
'
o
(6.79)
0
leading to the CRLB for the frequeney
(j2 >
0)-
12(j2 f2
n ,
A2N(N2-1)
(6.80)
This is the CRLB for two signals with independent noise eomponents. For
only one signal, the information eontent is approximately one half, leading to
(j2>
0)
-
24(j2r
n,
A 2 N(N 2 -1)
(6.81)
Using
SNR=~
2(j~
(6.82)
the CRLB for (J) ean be expressed as (Ibrahim et al. 1990, Rife and Boorstyn
1974, Wriedt et al. 1989)
(6.83)
or if (J) = 21rf is used, this varianee reduees to
298
6 Signal Detection, Processing and Validation
(6.84)
This expression was derived assuming that the noise is spectrally white. Any filtering used to reduce the signal noise violates this assumption and Eq. (6.84) no
longer strictly holds. Thus, while (bandpass) filtering may improve the SNR, the
estimator variance may not be reduced.
For the case of phase Doppler signals, a second signal pair is required.
= m xj +n xi '
m x; = Acos(wt; + Ij?),
i = 0,1, ... , (N -1)
(6.85)
Xj =mx;+rlx;'
m x; =Asin(wt;+Ij?) ,
i=O,I, ... ,(N-l)
(6.86)
X;
y; = m y; +n yj ,
myj = Acos(wt; + Ij?+ LlIj?),
i = 0,1, ... , (N -1)
(6.87)
Yj = myj + rly;'
m y; = Asin( wtj + Ij?+ LlIj?),
i = 0, 1, ... , (N -1)
(6.88)
The joint probability density function becomes
(6.89)
and the elements of the Fisher information matrix are
r =_I_~[dmxk
'}
()~ k=O
daj
dmxk + dmxk dmxk + dm yk dm yk + dm yk dm yk )
da)
daj da)
daj da)
daj da)
(6.90)
The vector of unknown parameters is
(6.91)
The Fisher information matrix becomes
N-l
2A2~)1
i=O
N-l
/=_1 2A2~>
(}2
n
i=O
N-l
N~)
N-l
2A2~>
i=Q
N-l
2A2~)
i=O
N-l
N~)
N-l
A2~);
o
i=O
N-l
A2~)
o
i=O
N-l
A2~)
i=O
i=O
i=O
0
0
0
o
2N
(6.92)
6.1 ReviewofSome Fundamentals
J=
A2
6er2n f2,
2N(N -1)(2N -1)
6N(N -1)f,
3N(N -1)f,
0
6N(N -1)f,
12Nf/
6Nf/
0
3N(N -I)!,
6Nf/
6N!/
0
0
0
0
12Nf/
A2
299
(6.93)
The inverse of the Fisher information matrix is
12f,2
_ 6!,
N 2 -1
N+l
5N-l
rl=~ -~
2
2A 2N
N+l
N+l
0
0
-2
0
0
-2
4
0
0
0
0
A2
(6.94)
leading to the following CRLBs (H0st-Madsen and Andersen 1995)
(6.95)
(6.96)
2er2
er2Ll<p> A2N"
(6.97)
Note that these are the lower bounds for the four signals with independent noise
components. If only the two phase Doppler signals are given, then the information content is one half and the bounds become
2 er2(5N -1)
er > n
'1'- A 2N(N+l)
6f}
2
N(N -1)SNR
(6.98)
5N-l
2N(N+l)SNR
(6.99)
=----------
4er 2
2
er2 > ---" = ----Ll<p- A 2N
NSNR
(6.100)
The CRLB is exactly half of the value for a Doppler signal, since the frequency
information content in the two phase Doppler signals is twice as large. The
CRLB for the phase difference between the two phase Doppler signals is lower
than that for the absolute phase by a factor of 0.8, for large N. This can be seen in
Fig. 6.16, which presents the estimator variance results from Fig. 6.15b, normalized by the noise power.
All of the above derivations were based on a signal model of constant amplitude. In fact, laser Doppler and phase Doppler signals exhibit an amplitude de-
300
6 Signal Detection, Processing and Validation
o
o
00
0
0
0
0
D---LT-------------------------------------~---------------------o
0
0
0
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
------ CRLB (ip)
0.01
Empirical Variance (ip)
0
- - CRLB (dip)
•
Empirical Variance (dip)
0.00
10.4
10-3
10-2
10- 1
10
Noise power [-]
Fig. 6.16. Variance of the maximum likelihood estimator, normalized by the noise power
for phase and phase difference. Comparison to the respective CRLBs (Simulation parameters as used in Fig. 6.15)
scribed by a Gaussian envelope and for this case, the derivation of CRLB is
somewhat more tedious. Results for the frequency, amplitude, arrival time and
residence time are presented by H0st-Madsen and Gjelstrup (1996).
6.2 Signal Detection
The most primitive form of signal detection is to apply an amplitude level to
distinguish between portions of the signal during which a particle is present and
those consisting only of noise. This is illustrated in Fig. 6.17 for a high-pass filtered laser Doppler signal.
A gate pulse indicates the beginning and the end of each particle signal. The
gate pulses can be used to enable further processing of the signal, e.g. a digitizing and storage or frequency estimation. The gate pulses can also be used to
measure the duration ofthe burst, the so-called particle transit time or residence
time. This is achieved by counting pulses from a high-speed oscillator during the
period of the gate pulse, as illustrated in Fig. 6.18. The time measurement has an
uncertainty of ±l interval of the high frequency oscillator. Although this rather
simple method of signal detection has been widely used for laser Doppler signal
processing in combination with period timing devices (section 6.3.3), it does not
fulfil the necessary requirements for distinguishing signal from noise. In fact
there is no principal reason why the noise amplitude must be smaller than the
signal amplitude, although the opposite would be considered particularly unfavorable measurement conditions. Nevertheless, such measurement conditions
6.2 Signal Detection
301
Fig. 6.17. Simple amplitude detection scheme
I'
_G_at_e..:.p_ul_s_e_ _......
i
!
Oscillator pulses ,
Llllllllllljlllll~~~,~ ~~ 11 , I1111I111111111
Counter
N,r~
- - ----- ----
!
J,,,,
!
-----,----- --------------------- - .';...r , - - - - -
i
i
Rcsidence lime
o ~--~--=~--------------.
Rcsel
Slarl
Siop Read ou l
Fig. 6.18. Measurement of the residence time using a high frequency oscillator. No" is the
number of counted oscillator pulses during the gate segment
are regularly encountered in complex, two-phase flows exhibiting strong variations of particle concentration and background noise. Thus, detection schemes
based on a signal amplitude threshold cannot be considered very reliable. Furthermore, amplitude-based detection would lead invariably to a favored selection of large amplitude signals, which in the phase Doppler technique, would
translate directly into a bias favoring large particles.
Some improvement can be obtained by monitoring the amplitude of the signal envelope, i.e. after low-pass fI).tering the burst signal. This approach can be
refined further with a peak detection scheme, such that only the central part of
302
6 Signal Detection, Processing and Validation
each signal, i.e. the part with the maximum SNR will be processed (Qui and
Sommerfeld 1992, Bachalo et al. 1989). This technique results in improved frequency and phase estimates from the signals and also leads to a decrease of trajectory-related sizing errors in phase Doppler systems (Sankar and Bachalo
1991, Grehan et al. 1992, Aizu et al. 1993), as will be discussed further in chapter
8. Nevertheless, all approaches based on signal amplitude retain a fundamental
dependence on the system gain (e.g. photodetector high voltage), which is set by
the user or influenced by changing flow conditions.
The part of the signals carrying information is distinguished by its periodicity
or a coherency over a finite time interval. Noise on the other hand, is spectrally
white and as such, is completely uncorrelated with itself over any time interval.
Thus, the signal and the noise are separable in the spectral or correlation domain. This property of the spectrum and autocorrelation functions has been reviewed in section 6.1.
The detection is preferably performed in advance of the signal processing or
even on-line, but can just as easily be applied as a post-detection, in which case
it is generally known as a validation step. Increased capabilities of digital electronics has led to a host of new on-line detection schemes based either on the
PSD or the ACF, some of which have been patented and/or commercially realized. Several of these schemes will be briefly reviewed.
The burst detection method of Jensen (1992) is based on detecting the first
negative peak of the ACF falling below a fixed threshold. The burst detector operates on the I-bit digitized (or clipped) input signal. A positive signal voltage is
coded as 1 and negative signal voltages as o. The double-clipped correlation operates on this I-bit data and can be very economical to implement since only
logic gates are required. The value of R(O) is always equal to n, the sampie record length, and thus the amplitude of other peaks in the correlation function, for
instance the first negative peak, in relation to n gives a direct measure of SNR.
Therefore, a negative threshold of the ACF can be used for minimum SNR detection. A rough frequency estimate is obtained by determining the shortest
time-delay coefficient that falls below the fixed threshold, since the fundamental
frequency of the ACF is the same as the signal frequency in time domain. The
transit time is determined by measuring the time during which negative valued
coefficients fall below the specified threshold. The center of the burst can be determined by marking the beginning and end of the burst captured in the FIFO
(First in first out) of the sampier running parallel to the burst detector.
The burst detector, pictured as a block diagram in Fig. 6.19, is implemented
using an autocorrelator with 16 logarithmically spaced delay taps operating on
the I-bit digitized signal. These taps are placed so that they cover a 15:1 dynamic
range in frequency. The logarithmically spaced coefficients of the doubleclipped ACF are computed by multiplying the delayed outputs of the delay line
by the incoming signals. A short-term running average for each of these delay
products is calculated using a simple RC filter and compared to the preset
threshold. The time constant is chosen to correspond to about 4 cycles of the incoming signal. Further details can be found in Jensen (1990) or TSI Inc (IFA
755).
6.2 Signal Detection
I-bit digit ized signal
303
Logarilhmic dc\ay line
ShOTt time
average
Reference threshold
Threshold
comparator
Deleclor logi..:
4-bit frequcn..:y
Burst gate
Fig. 6.19. Block diagram ofrS! 755 burst detector
AI-bit correlation approach is also used in the minimum cross-correlator
(MMC), introduced as part of a laser Doppler sensor concept by Damp and
Sommer (1993) and Damp et al. (1994). In this system, massively parallelized
correlators on an ASIC (Application-specific integrated circuit) simultaneously
monitor signal coherency over a very broad bandwidth by cross-correlating with
the simplest possible signal signature, namely (01010101..., 001100110011...),
hence the term minimal cross-correlation.
The parallel implementation of the previous detection scheme was used to
monitor simultaneously a large frequency bandwidth. A similar strategy stands
behind the detection system described by Blancha and Murphy (1990), in which
the signal is passed to aseries of narrow bandpass fIlters to detect Doppler signals at low SNR in a given frequency range. Obviously the overlap of the filters
must be carefully chosen and the system has bandwidth limitations imposed by
the hardware realization.
The DFT is essentially a digital realization of a filter bank, the steepness of the
filter being related to the total observation time and the spacing related to the
number of sampie points. Thus, several signal detection units have employed a
DFT with subsequent computation of the power spectral density. Almost all
hardware implementations of the DFT utilize quadrature mixing to generate
from one input signal, a pair of signals with equal amplitudes and a precise
90 deg-phase relationship. These signals represent the sine and cosine part of the
signal and can each be Fourier transformed to yield the real and imaginary contributions to the spectral distribution. Thus, the total record length to be transformed can be halved. Techniques for quadrature mixing are discussed in section 6.3.4.
304
6 Signal Detection, Processing and Validation
In terms of signal detection, the question to be asked is; what is the probability of detecting a spectral peak, which actually corresponds to noise, rather than
to a coherent Doppler signal (false detection rate)? This question has been investigated empirically by Qui et al. (1994) and theoretically by Ibrahim and
Bachalo (1992). Although not directly comparable on quantitative terms, both
investigations show clearly that the false detection rate decreases for increasing
record length, that it decreases for increasing SNR and, that a rate of less than
1% can be achieved at SNR = -5 dB for arecord length of 32 or larger. Ibrahim
and Bachalo (1992) find also a significant advantage of the Fourier-based detector over a correlation-based detector.
To perform the DFT at sufficiently high speeds for use as a burst detector or
for preliminary frequency estimation, three approaches have been adopted in
various devices:
• buffered data storage with rather complex (and expensive) hardware-wired
processing
• recursive algorithms for fixed window, sliding D Fr
• I-bit DFT with simplified hardware
One example of a processor using buffered data storage is the commercial
Burst Spectrum Analyzer, from Dantec Dynamics (Tropea et al. 1988). However
this device has in the meantime been replaced with much fast er and more flexible DSP(digital signal processor)-based hardware.
Qui et al. (1994) have derived a recursive DFT, which in the notation of Eq.
(6.1) becomes
X.
_k.,+!
(.2nk)(
1 x .-x )
=exP J-N- X
_k., +n (_N+,
-,)
(6.101)
This recursive approach is particularly attractive if only a few Fourier coefficients have to be computed, i.e. when the frequency of the input signal is known
quite weIl apriori. To achieve this, Qiu et al. (1994) employ a novel frequency
modulation procedure to transform two bandpass filtered input signals of the
same frequency to a signal with a constant known frequency, but with the same
amplitude as the first input signal. The constant frequency is chosen such that
the Fourier index, k = N 14, i.e. the sampie frequency, is four times larger than
the signal frequency. Hence the DFT is only performed in one frequency bin,
taking advantage of the recursion formula in Eq. (6.101). The technique can be
realized on-line at low cost and also results in the phase difference between the
two input signals, which is relevant for phase Doppler applications. For laser
Doppler applications, the photodetector is simply connected to both signal inputs of the electronics. The actual signal detection is performed by comparing
the spectral coefficient amplitude at frequency index k with apreset threshold.
This signal then gates further processing and yields the burst duration (transit
time).
AI-bit realization of the DFT has been implemented by Ibrahim et al. (1994)
(Real-Time Signal Analyzer, Aerometrics/TSI Inc. St, Paul, MN) in which a 32
complex sampie DFT is performed on a sliding window of 75% overlap (8 sam-
6.3 Estimation of the Doppler Frequency
305
pIe shift). The computed SNR is monitored and compared with apreset threshold. Once the threshold has been exceeded, a lower level for detection is used to
prevent areset of the gate due to variations of the SNR throughout the signal
(US Patent No 5,289,391). In this implementation 20 million DFTs can be performed per second.
In closing the discussion on signal detection, it is worthwhile to once again
underline the distinction between simply triggering a processing algorithm and
the actual signal detection. The detection step can be either a pre- or postvalidation of the result and essentially establishes whether the processed data is
to be considered a valid signal or not, and possibly also how reliable the signal
may be. By their nature, some signal detection schemes also provide further information, like first frequency estimates, transit time, burst centering information or phase difference information.
6.3 Estimation of the Doppler Frequency
The Doppler frequency fD refers to the frequency of the signal periodicity when
a particle passes through a laser Doppler or phase Doppler measurement volurne. The frequency is related to the particle velo city through (Eq. (2.27»
fD=
2v.L sill <J2'
Ab
(6.102)
Two basic assumptions are usually made in laser Doppler signal processing: the
fringe spacing, L1x = Ab sin(<J2') /2, is constant throughout the measurement volurne and the particle velo city is constant during the passage through the measurement volume. In fact neither of these assumptions are strictly true, although
for the time being they will be assumed so. Section 5.1.2 examines in detail the
necessary conditions for a constant L1x and section 7.2.4 specifies und er what
conditions the particle velocity can be assumed constant. Some initial processing strategies for signals with varying frequency or phase are discussed in section 6.5.
The Doppler frequency fD is a random variable, meaning even an exact repetition of a particle passage, with precisely the same velocity, will yield a different
signal, hence, a different frequency estimate. This is due to the triply stochastic
nature of the processes involved: light scattering, light detection and signal amplification (Mayo 1975). The scatter, or variance of fD' given exact repetitions,
will also represent the lowest measurable flow turbulence level and as such, is a
quantity of considerable interest. Specifically, for the estimation of signal frequency, the Cramer-Rao Lower Bound (CRLB), as discussed in section 6.1.5,
presents the lower bound of variance. For the case oflaser Doppler signal processors, digitizing the signal with a sampie frequency of f, and over a set of N
sampies extending the length of the Doppler signal, the CRLB is given approximately by Eq. (6.84), whereby the noise is assumed to be Gaussian distributed in
amplitude and spectrally white. Although Eq. (6.84) has been derived for a con-
306
6 Signal Detection, Processing and Validation
stant signal amplitude, it is also an adequate approximation for Doppler burst
signals in the following discussion.
The goal of any laser Doppler or phase Doppler signal processor is to determine fD' while achieving the CRLB variance. An estimator wh ich achieves the
CRLB is known as an efficient estimator. In fact, this lower bound can be undercut if apriori knowledge of the signal is available. A good example is the use of
narrow-band filters before the processor, which essentially increase the SNR, the
danger being, that in a turbulent flow the signal frequency may fluctuate outside
the chosen filter bandwidth, thus falsifying or biasing the overall flow statistics.
In Eq. (6.84), the quantity N / fs represents the duration of the record. If the
signal duration is matched to the record duration, this can be replaced by the
transit time rand, assuming a system bandwidth Af equal to the Nyquist frequency (f, /2), Eq. (6.84) can be written as
,,;= 21t3
2
(')
r 3 Af 1- ~2 SNR
(6.103)
Assuming that the record length can be continuously weH matched to the signal duration, despite changes due to e.g. partide trajectories, increasing either
SNR or the residence time can reduce the variance of frequency estimation.
Means for increasing SNR can be inferred from Eq. (3.210), for instance increased laser power, larger collection aperture or larger scattering centers. The
residence time can be increased by using a larger laser measurement volume;
however, with a given laser power this also decreases the incident intensity and
the SNR. Since this decrease is inverse quadratic, a net improvement of the frequency estimation can be achieved with a larger measurement volume. A somewhat more refined analysis, considering also the variation of SNR across the
measurement volume, is given by Ibrahim et al. (1994), resulting in the proportionality
2
1
(J - -
fJi
(6.104)
This discussion underlines the importance of not only maximizing the system
SNR, but also devising electronics that exploit a maximum length of the available signal, if possible centered about the maximum amplitude. Adaptive burst
length processing schemes have been developed for this reason and can be
shown to be unbiased (H0st-Madsen and Gjelstrup 1996).
Attention is now turned to various estimators of fD' their performance (how
dose their variance comes to (J}) and their implementation. One further consideration is the robustness of the estimator, meaning its sensitivity to slightly
varied processing parameters, typically understood as the sensitivity to front
panel settings or user manipulation. The actual evaluation of signal processor
performance is not at all uncontroversial, since a large number of influencing
parameters are relevant and not easy to duplicate between laboratories. For
more details on testing methods per se, the reader is referred to Tropea et al.
(1988), Tropea (1989) or Hepner (1994).
6.3 Estimation of the Doppler Frequency
307
6.3.1 Spectral Analysis
The following discussion is restricted to digital signal processing, since analog
devices for spectral analysis play virtually no role any longer in Doppler signal
processing. The choice of the sampling frequency is dictated by the Nyquist criterion and the number of sampIes is dictated by either the signal duration, or
possibly the processing speed, if the signals are all of long duration. This is
clearly the first dilemma encountered, since the signal duration depends on
particle trajectory and scattering amplitude (among other things) and varies
between zero and some maximum value for the ideal measurement volume
crossing. Any fixed sampIe size will necessarily be sub-optimal for any given
burst. On the other hand, it is not possible to know signal duration beforehand,
so that any attempt at variable width spectral analysis necessarily requires buffer
memory with post-optimization. Tropea et al. (1988) investigated the influence
of the burst length to record length for an FFT processor operating on 16, 32 or
64 sampIes as a function of SNR. The result reproduced in Fig. 6.20, indicates
that for ratios above 0.8, no significant improvement is obtained. This also indicates that not N or J, alone, but the total observation time is the important parameter, at least above N = 32.
There have been several commercial (Lading 1987, Meyers and Clemons 1987,
Ibrahim and Bachalo 1992) and numerous other implementations of FFT signal
processors. Indeed, employing a transient recorder, it is possible to realize such
a spectral analysis in any laboratory in software, albeit without sophisticated
signal detection and often at much lower processing rates. For speed improvement, most commercial processors use a reduced number of bits, typically :::; 4,
quadrature mixing, so that only half the number of sampIes are required, and a
time domain window, e.g. Hamming, due to the short signal duration. Most
b
a
~
4
c
0
.;:::
'"
.~
3
'd
'd
...
'"
'"
if)
'd
c
2
I
--
r\
•
-
SNR = 25 dB
N=8
- 0 - N=64
.\
-
\
\"'---.
N=8
- - N=64
2
. -........
'. -.
-
..............
1
= -7 dB
-0-
4
0 ~-o-o-o~o-o-o-o---Olo-o _
0
SNR
-
-
•
1
6
I
2
Burst length Irecord interval [ -]
~o
0
0
•
DDOD-O-D-O_D_D
2
4
Burst length I re cord interval [ -]
Fig. 6.20a,b. Variance of an FFT processor (BSA) as a function of the burst length to record length ratio. a SNR = 25 dB, b SNR = -7 dB
308
6 Signal Detection, Processing and Validation
processors operate on fixed length transforms, one exception being a high-speed
FFT processor from Aerometrics/TSI Ine. (RSA). Irrespective of the presence or
absence of the Doppler signal, this processor transforms the incoming signal at a
rale of 20 million transforms per second, updated with every 8 neW sampies.
Once adetector gate pulse is present, frequency measurements are stored in a
circular 4-cell memory buffer. Measurements with N = 64 (32) are used first.
Once the gate length exceeds N =128, the frequency values for N =128 are
stored and so on until four valid measurements with N = 512 are obtained. If the
burst is shorter, the four most re cent frequency values are averaged and a fluctuation tolerance is applied as one validation criterion.
The actual frequency estimation from the sampled signal follows from the
power spectral density. Consider a signal of the form
(6.105)
with a as the maximum signal amplitude at the arrival time tm , 17 being related
to the inverse of the residence time squared, fD as the Doppler frequency, and
rpa as the signal phase associated with the signal. The discrete Fourier transform
(Eq. (6.1)) ofthe signal given in Eq. (6.105) is
5(
~t;l )(J,) = A;, J* ex{-.'(f,~- J.)' + j [2.U, - J, )t~ + "'"1J
(6.106)
and the power spectral density (Eq. (6.6)) is given by
G(fk) = AG exp[ -17GUk - fD)2],
2n 2
k = 0,1.. .,N 12
(6.107)
17 = G
17
(6.108)
A = nfs a 2
(6.109)
G
217N
with fk = k fs 1N and assuming that there is no interference between the spectral
peaks at fD and fs - fD' This also assurnes that the burst has not been truncated
in the time domain, i.e. that the amplitude becomes negligible at the end of the
transformed record.
The maximum coefficient value is assumed to arise from the Doppler signal.
The second maximum is often also identified and compared in magnitude with
the first. Only if apreset ratio of the two is not exceeded, will the data be considered valid, thus avoiding validation of very noisy signals. The inherent frequency resolution of the digital PSD is given by Eq. (6.4) and thus, improves
with increasing record length. A significant resolution improvement, typically
by a factor of 10, is possible by interpolating the peak position around the
maximum coefficient. The interpolation curve should account for the shape of
spectral broadening, which for a centered burst with Gaussian envelope, is Seen
from Eq. (6.107) to also be Gaussian. If the logarithm of the PSD is considered,
6.3 Estimation of the Doppler Frequency
309
the spectral broadening is described by a parabolic curve. The situation is pictured in Fig. 6.21
The interpolation curve is determined using three coefficient values, and the
position of the peak normalized with the spectral resolution is given by
(6.110)
for a parabolic curve. The frequency of the peak value is then
(6.111)
Variations on this procedure have been suggested, all of which lead to marginal improvements. Hishida et al. (1989) have suggested a five-point regression
of the parabola. Matovic and Tropea (1991) have introduced an iterative, variable width interpolation. If the burst is very short the peak broadens more and
the two points on either side of the maximum value are also very high. In this
case, the points Gk _ 2 ,Gk'Gk+ 2 are used in the interpolation. Also peak detection
algorithms using the first moment of the spectral peak have been suggested.
To demonstrate the performance of the three-point, parabolic interpolation a
numerical simulation has been performed using the signal
(6.112)
Note that s(t;) corresponds to a noise-free, modeled signal, whereas s(t;) represents the (noisy) measured signal. For the simulated signals, the sampling parameters fs = 10 and N = 256 have been used and the noise is uncorrelated and
Gaussian distributed 1• The model has the (true) parameters a = 0.9, 17 = 0.1,
fD = 1.3 and ({Jo = 0.8. The noise power2 was varied logarithmically in 15 steps
between e-lO and e2 • For each noise level 10,000 independent realizations of the
Doppler signal were generated. For each signal the PSD was calculated and the
peak detection using the parabola interpolation was performed. In Fig. 6.22 the
empirically found variance of the frequency estimates is shown in comparison to
the Cramer-Rao lower bound. The variance is seen to be significantly higher
than the CRLB and the estimator is therefore not efficient. Furthermore, a
threshold noise power can be recognized, above which the noise dominates the
spectrum and the algorithm estimates the frequency randomly across the entire
frequency range.
A second estimation procedure was realized in this simulation, in which fIlters were applied to the signal before calculation of the spectrum. Filtering in1
2
The frequencies in this example have been non-dimensionalized using 2n. The amplitude is given in arbitrary units.
The noise power has been normalized with the signal variance, thus a~ = 1 corresponds to SNR = 0 dB.
310
6 Signal Detection, Processing and Validation
Frequency
Fig. 6.21. Interpolation of the spectral peak position
- . - Three-point parabolic interpolation
• __________ 0 - - 0
- 0 - Three-point parabolic interpolation (windowed) /:./---------0
- & - Three-point parabolic interpolation
~~~:"W'd ""d fihered)
I/'//x~'
.---------.---------~*~~~
• __________
~a
~
.~.--------~*~
.~ ~
10-6
.~ ~a
~~
10 -7 ~::...d:::.-l-L.LL.LllJL------'-----'--'-LLJ--'--Ll_----'--L----'---JLLl--'--Ll_----'--L----'---JLLl--'--Ll_----'--L----'---JLLlJ.JJ
10-4
10 3
10'
10- 1
10
Noise power [-1
Fig. 6.22. Empirically determined variance of frequency estimation procedures using
parabolic interpolation of the logarithmic PSD compared to the CRLB. Signals have been
simulated
creases the SNR and thus an improvement is expected in the frequency estimation. The fIltering consists of two steps. First only that part of the signal exceeding e- 2 of the maximum amplitude was filtered. Then a Blackman window
(Rabiner and Gold 1975) was used to suppress edge effects. The results in Fig.
6.22 show the advantage of this signal conditioning compared to the original
signal processing. Further results relating to Doppler frequency estimation using
spectral analysis can be found in Shinpaugh et al. (1992).
6.3 Estimation ofthe Doppler Frequency
311
6.3.2 Correlation Techniques
There have been commercial implementations of laser Doppler signal pro cessors based on the autocorrelation function (ACF) or autocovariance function
(ACV) (Lading and Andersen 1988, Jenson 1992, Ikeda et al. 1992), as weH as
numerous research efforts, which employ the ACF, e.g. Damp and Sommer
(1993) or Damp et al. (1994).
The digital realization ofJensen (1992) works in combination with the tapped
delay line correlator for burst detection, described in section 6.2. The input signal is sampled simultaneously over 256 sampies at 16 overlapping sampie rates,
each with a 1:10 bandwidth. According to a rough frequency estimate from the
burst detection unit, one of the sampie rates is chosen and the content of that
buffer is transferred to the autocorrelator at the completion of burst detection.
Burst centering is possible before performing the autocorrelation over 128 delay
bins. The frequency is determined by checking the number of delay coefficients
that occur between zero crossings of the first and last valid cyde in the ACF. Cydes are validated according to the absolute maximum of each half cyde, which
is related to the SNR. The frequency resolution is improved by linear interpolation between the two coefficients that define the first and last zero crossing of
the measurement. Further validation criteria indude a minimum number of cydes in the ACF and a minimum number of delay coefficients between the first
and last valid cydes.
Alternative methods for frequency estimation from the autocorrelation function have been experimented with. Matovic and Tropea (1989) have used a
parametric estimator, termed the autocovariance lag ratio method, to match a
cosine wave locally to three of the autocorrelation coefficients. For instance, the
autocorrelation function ofthe signal given in Eq. (6.112) is given by
(6.113)
(6.114)
(6.115)
Very good performance down to SNR = 0 dB was achieved. This work also confirmed that stable results could be achieved using only al-bit digitization
(dipped correlation), which was also exploited by Nakajima et al. (1988).
One processor based on the covariance function has been implemented in
analogue circuitry (FV A, Dantec Dynamics AIS, Skovlunde, Denmark). The
principle can be understood from the block diagram in Fig. 6.23, in which the
input Doppler signal is labeled set). This signal takes the form
set) = a exp[ -1] (t - tm )2] [1 + rcos(21t fDt+ /Po)] +n(t)
where
r is the modulation depth of the signal.
(6.116)
312
6 Signal Detection, Processing and Validation
Gatc from Burst dctcctor
Fig. 6.23. Block diagram of an analog laser Doppler processor based on the covariance
function
The input signal is first bandpass filtered, removing its mean value. This signal is then fed to a hybrid coupler and to a delayer, set to the delay time r, after
which a multiplication and integration is performed. The 0 deg and 90 deg signals after the hybrid coupler can be expressed together in complex notation as
(6.117)
If the envelope is expressed as
Ac (t) = aexp[ -1](t- t )2]
m
(6.118)
then the real and imaginary parts of the autocovariance can be expressed as
CR=Ac(r)cos(21tfDr)+nR(r)
(6.119)
C[ = Ac(r)sin(21tfD r )+n[(r)
where Ac (r) is the autocovariance of the envelope curve
Ac(r)= JA(t)A(t+r)dt
(6.120)
and nR(r)+jn[(r) represents the complex autocovariance of the noise associated with the signal. Choosing r sufficiently away from r = 0, the autocovariance of the noise is zero so that the ratio
(6.121)
yields an expression independent of signal amplitude and phase. A burst detector gates the correlation integral and the arctangent of the ratio is performed
after integration to yield the Doppler frequency. The choice of the delay time, r,
has an influence on the resolution of the frequency measurements. The greater
this delay, the higher the resolution. However larger delay times limit the measurement range, since then a 21t phase ambiguity can arise. This range limitation
is overcome by measuring the autocovariance at two different values of r. Fur-
6.3 Estimation of the Doppler Frequency
313
ther details of this processor can be found in Dantec (1999). Lading and Andersen (1989) have evaluated the performance of the processor.
6.3.3 Period Timing Devices
Electronics which deterrnine signal frequency directly in time domain, do this by
measuring the elapsed time T over a number of signal periods Np
N
f v-- - p
(6.122)
T
These are known as period timing devices (or counters). Although widely used
in the 1970s and 1980s, these devices are no longer offered commercially and are
being replaced by processors operating in spectral domain or in the correlation
domain. The main reason for this is that period timing devices are particularly
sensitive to noise and improper frequency values, or "outlier" data points are not
uncommon at low SNR values.
In its simplest form, this sensitivity is illustrated in Fig. 6.24a, in which random noise fluctuations lead to extra zero crossings, which may register as additional periods. For this reason, not zero crossings, but multiple level crossings
are used to count periods. Two such schemes are illustrated in Fig. 6.24b,c respectively. In Fig. 6.24b a valid period is indicated by the level-crossing sequence: negative crossing of L), negative crossing of Lo and negative crossing of
L_1' with no positive crossing of L) in between. In Fig. 6.24c the period sequence
is given as: positive crossing of L), positive crossing of L 2 and negative crossing
of L o, where multiple crossings of L 2 are permissible.
The same sequence of level crossings can be used to indicate the beginning
and the end of a burst signal, thus activating a gate pulse on which to measure T
(see Fig. 6.17). In practice, the level crossing amplitudes are held fixed and the
signal amplitude is matched to these amplitudes through a variable input amplification factor. This is an extremely sensitive user adjustment, since too small
a factor results in low detection rates and too large a factor leads to level crossing domination through background noise. The bandwidth of acceptable amplification factors is generally not large, requiring considerable user experience for
a correct adjustment. For any given measurement point, the signal amplitude
may vary considerably from one particle to the next, inherently limiting the efficiency of such an amplitude-based detection scheme. Furthermore, the amplification factor may require considerable adjustment from one measurement point
to the next, for instance as the measurement volume approaches a solid wall.
This inhibits automation of the data collection process.
Recognizing that an optimal match between signal amplitude and detection
threshold will be rare, additional safeguards are usually foreseen against noiseinduced errors in the frequency estimation. These generally take the form of a
redundant frequency measurement, which must agree within certain bounds of
the first measurement. Two registers for N and T are started simultaneously and
the measured frequency is only validated under the condition that
314
6 Signal Deteetion, Proeessing and Validation
a
b
L,
1---~--.-~~+-~~~H-~~~~~+-~~~~~,-~"
~~~~~~~~~~~H-HH~~~~~Hrl~~~~~~~~--~
L_I +~~~--''-. ·--'-il:-+-i~.J!-t;-++-hl-.r--Ti-H-!t"-1Ji!-.:r-~-='f--P--l--
LI' L,.
L.o_
1 1
~J
. l!
I
c
I
') I! I
1'-1_
Peri od : I
2 3 4 5 6 7 8 9 10 11 12 13
1~ . I
Periods: 1
2
:'I
4 5
6
7
8
9
10
11
12
Fig. 6.24a-c. Amplitude threshold deteetion used for eounting signal periods in period
timing deviees. a Zero erossing deteetion, b Amplitude levels symmetrie about zero,
e Amplitude levels asymmetrie about zero
T2 - 11 < t:
I.!!.L
N2 T;
(6.123)
where t: is a freely selectable upper bound lying between 10/0 and 10%. Typical
choices for N j / N 2 are 4/8, 5/8, 8/16 or 16/32. At the same time, this condition
effectively prescribes a minimum number of periods which must be counted
before validation is possible, i.e. N 2 • Nevertheless, given the above validation, it
may still be desirable to base the frequency determination on all periods in the
signal (total burst), since this will result in a high er accuracy. This can be seen by
6.3 Estimation ofthe Doppler Frequency
315
examining the normalized uncertainty of the frequency estimate, t5fD I fD' due
to the uncertainty in the measurement of time T
t5fD
fD
1
Nase
fs
Npfose
--=--""--
(6.124)
where Nase is the number ofhigh speed oscillator dock pulses and fase is the frequency of the oscillator (see Fig. 6.17). This uncertainty decreases with increasing NJ" Utilizing the total burst for frequency estimation has the added advantage that T then corresponds to the transit time, which may be required for
estimators offlow quantities (chapter 11)
Regardless of whether the frequency is computed over a set number of periods or over the total number of periods in the burst signal, it is still necessary to
detect the end of the burst. For one, this determines the signal duration (transit/residence time) and furthermore, the electronics must be reset to allow a new
measurement to begin. Alternatively, the device can be reset immediately after
the validation step, in which case multiple frequency measurements will be
made per burst (continuous mode). This may be desirable in certain liquid flows
with very high partide density or for some non-fluid dynamic applications of
the laser Doppler technique, e.g. measurement of surface velocities.
More detailed considerations concerning refinements of the above estimation
procedures can be found in Dopheide and Taux (1984), Dopheide et al. (1990)
and Ruck and Pavlovski (1995). In all of these investigations, transient recorders
with pre-triggering were used for signal sampling, as first introduced by Petersen (1975) and Durst and Tropea (1977). Thus, burst centering could be performed retroactively and, in some cases, even iterative procedures for the frequency estimation have been suggested.
6.3.4 Quadrature demodulation
Quadrature demodulation as a means for laser Doppler frequency estimation is
relatively young and not yet commercially available. Although it appears to fail
at low SNR (SNR < 10 dB) (Czarske 2001 b), the technique exhibits several features which make it attractive for a number of novellaser Doppler systems, induding those employing two frequency-stabilised, monomode diode lasers
(Müller and Dopheide 1993) or other tunable high power laser sources. The
technique can also yield time-dependent phase difference information between
two signals (section 6.4.3), a feature which may be of particular use in specialized phase Doppler systems.
The quadrature demodulation method is weIl established in various disciplines of signal processing and can be explained in terms of the Doppler signal
of constant amplitude and the same signal shifted -90 deg, written in complex
form as
~(t) = a(t)[ cos( 21tfDt + 9'0)+ j sin(21t fD t + 9'0)]
=
a(t) exp[j ( 21t fD t + 9'0)]
(6.125)
316
6 Signal Detection, Processing and Validation
This quadrature signal pair of the input laser Doppler signal can be represented
as the real and imaginary part of a complex rotating phasor, whose time dependence is given by
s (t))
(t)=arctan( _ 1 _ =2n!v t +rpo
(6.126)
SR(t)
as pictured in Fig. 6.25. The Doppler frequency can be determined from the
slope of the phasor (t) with time. The absolute phase shift rpo' is not readily
available, since for this a reference time t = 0 must be specified.
The implementation of the quadrature demodulation technique is achieved
by employing the Hilbert transform (section 6.1.3) to generate a second signal
shifted exactly -90 deg in phase to the original input signal. These two signals
then become the real and imaginary signals SR(t) and s/(t).
Note that the sense of the particle velocity can be recognized by the rotation
direction of the phasor. Particle motion in the positive x direction leads to
d(t) I dt > 0, i.e. a counterclockwise rotation of the phasor, and motion in the
negative x direction leads to d(t) I dt < O. This property has been exploited in a
number of novellaser Doppler systems to eliminate optical frequency shifting
devices.
A graphical representation of the quadrature demodulation technique,
adapted from Müller et al. (1996), is shown in Fig. 6.26. Note that the phase angle as a function of time also yields the particle position in the measurement
volume.
rm{s(t)}
rm{s(t)}
(=0
Wv
WD
Re{s(t)}
0
t,
tJ Iv
=ZnID
-a
-a
0
I,
Re{s(l)}
acos(znID1+<rol
Z
tJ Iv
Fig. 6.25. Time dependence of the complex rotating phasor after quadrature demodulation
6.4 Determination ofSignal Phase
317
W)-2nn
cos(t,; (t»
a(t)
s(t)
A
Re{s(t)}
Im{s(t)}
Fig. 6.26. Quadrature demodulation byevaluating the phase angle time function (t)
6.4 Determination of Signal Phase
In phase Doppler systems, not only the signal frequency but also the signal
phase, or better the phase difference between two signals, must be determined as
a primary quantity. The standard working equations for phase Doppler systems
are Eqs. (5.221) and (5.225), linearly relating the measured phase difference to
the particle diameter. To a first approximation, the frequency and phase of each
of the two signals are considered constant throughout the duration of the signal.
As with frequency determination, the phase difference is also a random variable
and there exists a lower bound to the variance of its estimation as given by Eq.
(6.100) (H0st-Madsen 1995). Several different techniques for signal phase estimation are presented in this section.
6.4.1 Cross-Spectral Density
U sing the notation of seetion 6.1.1, the complex cross-spectral density is defined
as
(6.127)
sometimes expressed as
318
6 Signal Detection, Processing and Validation
Qxy(Jk)= Cxy(Jk) +j Qxy(Jk)
'-----v-----'
Coherence
(6.128)
'-------v-----'
Quadrature
where Kk and L are the Fourier transforms of the two signals x; and y; respectively. The cross-spectral density is a complex function, the real part known
as the coherence function and the imaginary part called the quadrature function.
The phase difference between the two signals x; and y; at the frequency fk is
given as
(6.129)
(s
Two sinusoidal signals exactly in phase with one another
xy (fk) = 0) will
lead to all the signal power appearing in the coherence function. Conversely, if
the signals are 90 deg out of phase, all signal power will appear in the quadrature
function.
Standard FFT algorithms can be used to compute G xy and sxy' Two examples
are shown in Fig. 6.27 for signals with SNR = 4.4dB and SNR = 20dB. It is dear
that the phase difference LlqJ12 = qJl - qJ2 must be evaluated at the Doppler frequency, LlqJxy = qJx - qJy = SxY(!D), which can be determined using the interpolation schemes outlined in the seetion 6.3.1. A linear interpolation of the phase at
f D from the coefficients of Sxy (fk) is sufficient.
A detailed analysis of this technique using simulated signals provides performance criteria shown in Fig. 6.28 (Domnick et al. 1988). Given a digitizing
resolution of 2 or more bits, reliable phase difference estimates can be expected
for a SNR as low as 0 dB.
A 2n ambiguity of the phase difference exists with this method; however,
some additional computations can resolve this. Large partides yield not only a
phase shift but also a time shift of the entire signal, related to the detection volurne displacement, as discussed in section 5.1.3. This time shift can be used to
determine the correct multiple of 2n to be used for LlqJxy (!D) > 2n. The general
form of the two signals e.g. from two receivers (r = 1,2) can be expressed in
terms of the time shift for each signal ±tm,r and their phase shifts ±qJo,r
(6.130)
The cross-spectral density of these signals in discrete form is given by
G
_12
a 2 nf exp[
2N17
=_0_ _
'
(6.131)
2
a nf exp[
2N17
=_0_ _
'
with the amplitude
6.4 Determination of Signal Phase
319
5
..!.
a
"
=
"0
c..
.
E
-.;
c:
oJ:)
Vi
0
'"..
:,
~
-5
",•
o
- 10
I
10
10
Time
-;-
10
Time
t [fis]
I
[MH z]
1
"-
-
0.5 f-
-
<-::;':> 1.0
o
t [fis]
I
c
,
.'
,~ ~
>-
.;;:;
c:
"
"0
]
Ü
"5l'"
B
Ü
0.0
I
. .1
11.
I
.
'Cti 180
~
S
..f
.."
'"
..r:
Q..
0
I~
QS
0.0
Frcq ucnc)'
f
[111H z]
0.0
QS
Frequency
I~
Fig. 6.27a-f. Example processing of two time and phase shifted input phase Doppler signals with SNR = 20 dB and SNR = 4.4 dB. a,b Amplitude of the signals, c,d Cross-spectral
density function, e,fPhase function
2
a_
nf
G (f) = _0
_
' exp[
12
k
2N77
(6.132)
and the phase function
(12(Jk)=2n(JD - fk)L1t 12 -L1tp12 '
(6.133)
320
~
....
0
....
....
Q)
Q)
'"'"
6 Signal Deteetion, Proeessing and Validation
4
5 points I eyde
Phase = 73.5 deg
4.4 points I eyde
Phase = 54.5 deg
2
- 0 - 64
points
-.6.- 128 points
-+- 256 points
5:
~
4-1:>
6
0
-4
2
4
6
8 -10
Resolution [bit]
o
10
20
30
40
SNR [dB]
Fig. 6.28a,b. Error in the phase differenee determination using the eross-speetral density
method. Results obtained using simulated signals. a Influenee of digitizing resolution,
b Influenee of SNR (Domnick et al. 1988)
Thus the phase function SI2{fk) is a straight line passing through the desired
phase difference Lltp12 at the Doppler frequency, 2nfv' A linearization by means
of a straight-line fitting is necessary at low SNR (Fig. 6.27e,f). The slope of the
line is just Llt12 . This then resolves the 2n ambiguity using the cross-spectral
density.
The partide size may be determined either from the phase difference or the
time shift (see sections 5.3.2 and 5.3.4). Together, the information can be used to
extend the measurement range of the technique to large partide sizes. The procedure is as folIo ws:
1. The partide diameter is first estimated using the time shift method, which of
course requires an accurate estimation procedure for the time shift, ,1t12 .
2. The phase difference is then chosen with the addition of 2nN, using an N
which yields a diameter dosest to that obtained in step 1. Since this phase
difference can be estimated more accurately than the time shift, the diameter
computed from the phase difference is used as the final value.
This extension of the technique to larger partides also avoids erroneous
measurements of larger partides, which is particularly important for accurate
mass flux measurements.
An example of this signal processing is given in Fig. 6.27 for a phase difference of Lltp12 = -1.628 periods and a time shift of Llt12 = -tl + t 2 = -3.12I-1s. The
Doppler frequencyofthese simulated bursts is fv = 0.5031 MHz. For a signal-tonoise ratio of 5 dB, the estimated Doppler frequency is fv = 0.5017 MHz, the
phase difference is Lltp12 = -1.62 periods and the time shift ,1t12 = -3.67I-1s. At a
SNR = 20dB, these values were respectively fv = 0.5031 MHz, Lltp12 = -1.626 periods and Llt12 = -3.064l-1s.
6.4 Determination ofSignal Phase
321
6.4.2 Covariance Methods
In a manner similar to the frequency determination, the covariance function can
also be used to determine the phase difference between two input signals. An
analog implementation of such a scheme is illustrated in Fig. 6.29 and can be described as folIo ws.
Using the notation of section 6.4.1, each of the input signals (r = 1,2) takes the
form
Sr (t) = arex~ -17 (t - tm.r)2] rr COs(2n fDt + rpo.r)
(6.134)
where the Doppler frequency is assumed to be the same for each signal. Both input signals are first bandpass filtered to remove the mean and to limit the bandwidth of the noise present in the signals.
One signal (r = 1) is passed through a hybrid coupler, transforming it from
the real form into the complex form
(6.135)
where Ar (t) is the amplitude function
(6.136)
Each of the outputs from the hybrid coupler are multiplied by the other bandpass filtered signal and integrated to yield the real and imaginary part of the
cross-covariance function
(6.137)
(6.138)
where A12 (r) is the cross-correlation of the amplitude function and Ltrp12 is the
phase difference between the signals, Ltrp12 = rpj - rp2' The ratio of these terms at
r =0 yields a quantity independent of signal amplitude and frequency, which
Gate from Burs t dctcctor
Fig. 6.29. Block diagram of an analog processor for phase difference measurement based
on the covariance function
322
6 Signal Detection, Processing and Validation
can be used to determine the phase difference between the input signals.
C (0)
LJIP = arctan-I l_2 12
CR12 (0)
(6.139)
6.4.3 Quadrature Methods
The quadrature method for determining phase difference between two signals
follows directly from its use for frequency determination, discussed in section
6.3.4. If two detector signals are both subjected to the quadrature analysis, then
two phasor traces in time are obtained, as illustrated in Fig. 6.30. The vertical
distance between the lines corresponds to the phase difference between the signals. The validity of the measured phase difference can be made dependent on
the burst amplitude exceeding a certain threshold of the maximum amplitude,
for example 10%.
One advantage of the quadrature method is that the phase difference can be
continually estimated throughout the burst and thus, phase difference changes
can be registered. This feature can be quite attractive for some applications, e.g.
the dual-burst technique, as discussed in section 8.2.4.
As with an analysis using the cross-spectral density (section 6.4.1), a 2n ambiguity also remains with the quadrature method. One possibility to resolve this
~
"
180
~
."'"
o
..c
a.
-5
-4
Pig. 6.30. Phasor dependence on time within two phase Doppler signals
6.5 Model-Based Signal Processing
323
is to determine which multiple of 2n is correct, by estimating the time shift between burst envelopes. This can be easily implemented using the Hilbert transform and by computing the envelope function ofthe analytical signal, Eq. (6.22).
Due to noise, it is advantageous to then fit a Gaussian envelope to the computed
envelope function and base the estimated time lag on this fitted curve. Details of
this fitting procedure and its performance can be found in Lehmann and
Schombacher (1997). Their simulations indicated that with a proper choice of
processing parameters, acceptable results can be achieved for SNR values considerably below 10 dB.
6.5 Model-Based Signal Processing
(Contributed byH. Nobach)
6.5.1 Fundamentals
Recalling the classification of signal processing methods shown in Fig. 6.2, the
iterative methods use the results of a direct estimation and improve the model
parameters to better fit the signal or its statistical functions. This can be performed in time, correlation or frequency domain. Such a procedure requires an
appropriate parametric model of the signal, a value which indicates the accuracy
of the fit (figure of merit) and a strategy which automatically improves the
model parameters and minimizes the difference between the model signal and
the measured signal or of their statistical functions respectively.
Assuming a signal model exists, for instance the signal given by Eq. (6.105) in
time domain, by Eq. (6.107) in frequency domain or by Eq. (6.113) in correlation
domain, the actual measured signal 5(t;), its PSD cU,), or its ACF R( IJ must be
compared to the model signal using some figure of merit, for instance an L 2
norm
N-l
e(a, T/'!D,(jJO) = ~]s(tJ - s(tJt
(6.140)
;=0
N/2
_
2
eG (AG ,1lG,fD) = I[G(!k)-G(!k)]
k=O
N/2
_
eR (AR' T/R,fD) =I[R(rn)-R(Tn)]
(6.141)
2
(6.142)
n=O
Note that the optimization is performed only in one of these domains, so that
only one of the expressions is used. For statistical functions, which are symmetrical and periodic, only one half of the range is used and for the correlation
function, the coefficient at r = 0 is not used because of the noise power, which is
concentrated there.
For any given parameter set, the figure of merit can be now calculated. Starting with the results from direct parameter estimation as an initial parameter set,
324
6 Signal Detection, Processing and Validation
the parameters are improved iteratively, yielding a minimum L 2 norm. This can
be carried out using several techniques, e.g. random trial and error methods or
genetic algorithms. Presuming convexity, the iterative parameter optimization
can be performed with an algorithm, which is similar to the tangent algorithm
for the calculation of zeros. The convergence rate is very high, so that the accuracy of each parameter is approximately 10-6 after 10 iterations. However, all iterative estimators fail if the L 2 norm dose to the initial parameter set is not convex. Then the iteration procedure is divergent and simple parameter estimation
is not possible.
The iterative approach to model-based parameter estimation can approach
theoreticallimits of accuracy (CRLB) under ideal conditions. Real signals however, pass through several signal-conditioning steps (e.g. analog fIlters and amplifiers) and und er such circumstances robustness is more important than accuracy. Therefore, in many practical situations, a direct estimation may be almost
as effective, and the additional computational costs of implementing an iterative
approach may no longer be justified.
One interesting application area of iterative parametric estimation is when
the parameter to be estimated is no longer directly derivable from the PSD or
ACF. Several such situations have been selected below to illustrate the power of
model-based signal processing.
6.5.2 Example Applications
6.5.2.1 Estimation of Partic/e Acceleration
Normally, the partide velo city is assumed to be constant during its passage
through the measurement volume of a laser Doppler system. This may not be
true in the case of strong spatial or temporal velocity gradients in the flow field
and it may be interesting to estimate the partide acceleration from the acquired
Doppler signal. For a constant acceleration, the Doppler frequency can be expressed as
(6.143)
where im is the instantaneous Doppler frequency at the burst arrival time, i.e. at
the middle of the burst or at the time of the maximum signal amplitude, t m • The
parameter ß expresses the magnitude of the acceleration, through a = ßL1x,
where L1x is the fringe spacing. Figure 6.31 illustrates a simulated Doppler burst
from an accelerating partide and with added noise.
Examples will now be given of three types of estimators to determine im and
ß; a non-parametric estimator, a direct parametric estimator and an iterative
parametric estimator.
Non-Parametric Estimator. The Doppler frequency is a random variable and
can only be estimated as an average value from aseries of data points. Thus, to
estimate the frequency as a function of time, a sliding time window is required.
A rectangular window is not suitable for Doppler bursts, since the signal ampli-
6.5 Model-Based Signal Processing
325
-1
o
5
10
15
20
25
Normalized time [-1
Fig. 6.31. A simulated burst signal from an accelerating particle with added noise
tude at the window edges is high and the window truncates the signal, resulting
in a biased frequency estimate. Smoothing windows are therefore preferred, e.g.
a Hanning, Hamming or Blackman window.
A second effect, which also results in a biased frequeney estimate, is the fact
that the signal amplitude is not symmetrie within the window. The amplitude
asymmetry distorts the frequency peak in the speetrum, resulting in a translation of the peak center. An equalization of the signal amplitude is desirable.
Such equalization can be achieved using normalization with the instantaneous amplitude of the signal envelope. The envelope of the burst ean be calculated from the analytical signal, whieh is derived using the Hilbert transform
(Eq. (6.21). Given a measured (noisy) signal ofthe form
(6.144)
(s(t) is the noise-free model signal), the equalized signal s(f;} ean be ealeulated
using
s(t.) =
s(t)
,
[s(t;l+j t\{s(t;l}[
(6.145)
Figure 6.32 shows the result of the equalization proeedure on the burst from Fig.
6.31.
A sliding Blackman window of width Tw = 10 has been applied to the sampie
signal in Fig. 6.32 1 • For each window position in time, the instantaneous Doppler
frequeney is estimated using the position of the speetral peak, based on a threeI
In this example, time has been non-dimensionalized using the sample interval,
Llt, =11 J,.
326
6 Signal Detection, Processing and Validation
o
5
10
15
20
25
Normalized time [-I
Fig. 6.32. The equalized Doppler signal from an accelera ting particle
point parabolic fit to the logarithmic spectral values. These estimated frequeneies are only statistical values averaged over the window width. Thus, the
achievable dynamic range of frequency changes in time is limited. Nonetheless,
for a linear frequency change with time, this is suffieient. Only for a non-linear
time dependence would this represent a limitation.
Figure 6.33 illustrates the derived frequency changes with time for the signal
shown in Fig. 6.32. A linear fit to this frequency-time function directly yields es-
Normalized time [-I
Fig. 6.33. The estimated Doppler frequency as a function of time from an accelerating
particle
6.5 Model-Based Signal Processing
327
timates for the middle frequency Jm and the acceleration parameter ß. The procedure can be greatly simplified if a linear dependence is assumed and only two
end points are computed, for instance at the times tA and tB == t A + Llt. The estimates could then be made as
(6.146)
~
~
ß== !(tB)- !(tA)
(6.147)
Llt
This estimation procedure was introduced by Lehmann et al. (1990) and
Lehmann and Helbig (1999) and has been found to be very robust. The choice of
window or window width are parameters, which may be used to optimize the
estimates with respect to bias and variance. Figure 6.34 for instance, shows the
empirically found variance of the middle frequency and the acceleration parameter as a function of the window width with respect to the burst duration
(time between the e-2 points ofthe maximum amplitude). The two windows are
placed at the beginning and end of the burst respectively, as indicated in Fig.
6.35. The minimum variance occurs at slightly different window widths for each
parameter and a window width-to-burst-length ratio of 0.7 represents a suitable
compromise.
Direct Parameter Estimator. For a parametric estimation of the particle acceleration, a signal model must be specified. An appropriate model for a linear frequency change with time can be derived directly from Eq. (6.144). The phase
gradient becomes
(6.148)
a
... 10-5 """;-r,--,-r-,...,-r-rr,,;-r,,-r-,,,
Non-parametric
estimation
Non-parametric
estimation
CRLB
CRLB
10~~~~~~~~~~~~~~
0.2
0.6
1.0
Window width I burst length [-I
0.2
0.6
1.0
Window width I burst length [-I
Fig. 6.34a,b. The empirical estimation variance as a function of the window width-toburst-Iength ratio. aMiddie frequency, b Acceleration parameter
328
6 Signal Detection, Processing and Validation
-........
Burst signal envelope
../
"
Burst signal
Burst length
~
:Ei
1 ~-~---7"""_______------------~""'-
S'
'"
~c
~O~-r~----------~~------4-=-----------~+-Window width
o
5
Windowwidth
10
20
15
25
Normalized time [-I
Fig. 6.35. The placement of the time windows for estimation of the particle acceleration
and integration leads to an expression for the instantaneous phase
rp(t)=rrß(t-tm)2 +2rrfm(t-tm)+rpo
(6.149)
The discrete burst model becomes (i = 0, 1, ... , N -1 )
(6.150)
The discrete Fourier transform of this signal, assuming no interference of the
spectral peaks at fm and -fm and for the frequency range 0 to fs /2 (Nyquist
frequency) is given by
g{S(tJ}(fk) = afs
2
~ exp(
V~
rr 2(fk - fm)2
j(2rrfktm -rpo)]
(6.151)
1]-jrrß
Using the substitution
1]- j rrß= Bexp(jP) = exp(lnB+ jp)
(6.152)
leads to the amplitude and phase spectrum of the logarithmic discrete Fourier
transform
In{ g{s(t; )}(fk)} =
a (fk - fm)2 + Cl + j [a 2(Jk - fm)2 +bAfk - fm)+ C2]
j
'-v--------'
Amplitude spectrum
'
,
Phase spectrum
(6.153)
6.5 Model-Based Signal Processing
329
with
n 2 cos( -P)
(6.154)
B
C
=ln[aJ1t)_lnB
2
1
2
n 2 sin(-P)
(6.155)
(6.156)
B
(6.157)
C
2
P
=m
---2n
f" t
"1'0
2
Jm m
(6.158)
From Eq. (6.153), it is apparent that the middle frequency fm of an actual signal s(t;) can be estimated from the discrete Fourier transform of the signal
3{s(t;) Hfd by fitting a parabola to the maximum of the amplitude spectrum
and its two neighboring coefficients. This is similar to the signal processing
without particle acceleration, except that the amplitude spectrum, rather than
the power spectral density is used. Transforming the computed coefficients to
the argument f - j"" the remaining coefficients in the logarithmic amplitude
and phase spectrum, al' cl' a2 , b2 and c3 ' must be found by curve fitting. Using
the relations
(6.159)
the signal parameters can be estimated as follows
AB.
ß=--smP
(6.160)
i!=-BcosP
(6.161)
b2
t =--
(6.162)
n
A
2n
m
21=
A
fsJ:;exp(c + I~B)
1
P
({Jo = c2 +-+2nfm tm
2
(6.163)
(6.164)
These model-based parametric estimators perform well if the measured signal
resembles the modeled signal closely. It is, however, sensitive to distortions of
the envelope and therefore not robust. Such distortions can arise because the
burst length will be dependent on the particle velo city and the envelope length
will vary compared with the record length. Furthermore, the envelope can be
330
6 Signal Detection, Processing and Validation
distorted due to slit apertures used on the receiving optics, non-linear amplification, filters or window functions. In this particular example, the nonparametric estimator yields superior results.
Iterative Parametric Estimator. With the iterative parametric estimator, the aim
is to stepwise improve an initial parameter set to obtain agreement between the
model signal s(t) and the measured signal s(t;}. The L 2 -norm can be used as a
figure of merit
(6.165)
which has to be minimized (least squares method). For Gaussian distributed
noise, this leads to the maximum likelihood estimator. For other noise distributions, this is not the best estimator; however, in most cases it is sufficient and
robust. The additional weighting factors wi are necessary if the noise power is
not constant. They can be used to suppress very noisy parts of the signal. It is
unusual to be able to derive the L 2 -norm explicitly and this is the rational behind an iterative optimization of the parameter set.
For the case of an accelerating particle, the problems of envelope distortion,
as discussed above, remain and therefore, it is advisable to base the signal model
on the equalized signal S(ti), having constant amplitude of 1. The appropriate
signal model becomes
(6.166)
The parameter vector to be optimized is
(6.167)
Since the equalization yields a signal with time-dependent noise power, a
Blackman window is used as a weighting function.
Wi
21ti ) -0.08cos( 41ti )
=0.58-0.5cos( N-l
N-l
(6.168)
The original signal is presumed to be centered within the data record, with
tm =(N-l)/2.
The optimum parameter set is given by the system of equations
de
dß
de
=0
dim
de
d(jJo
(6.169)
6.5 Model-Based Signal Processing
331
This system is solved using a tangency algorithm, leading to the iteration step
from the n tb to the (n + l)th estimate
d 2e
dß2
d 2e
dßdfm
d 2e
--dßd({Jo
d 2e
dßdfm
d 2e
df:'
d 2e
dfm d({Jo
d 2e
dßd({Jo
d 2e
dfm d({Jo
d 2e
rp·,
f~n)
-
r'j
f~n+I)
({J6n) - ((J6n+l)
d({J~
de
dß
+ de =0
dfm
de
d({Jo
(6.170)
To prevent divergence after each iteration step, the parameter range and the
convexity of the figure of merit are checked using
O<fm <fs /2
(6.171)
-->0
d2e
dß2
(6.172)
d2e
df:'
(6.173)
->0
The convexity check is not necessary for the phase because of its periodicity.
These estimators are bias-free and almost efficient for the middle frequency
fm and the acceleration parameter ß over a wide range of signal parameters.
However, the non-parametric estimator is also quite reliable with much fewer
computations. Furthermore, the iterative approach requires good pre-estimates
of the parameters. The main advantage of the iterative approach is its possibility
to expand the signal model to include additional signal parameters, for instance,
higher order derivatives of the velo city.
6.5.2.2 Time-Shift Estimation
The time-shift technique, as introduced in section 2.3 and discussed further in
section 5.3.4, estimates the particle diameter from the shift in time between signals received on two detectors in space. The magnitude of the time shift depends
also on the position of the two detectors, on the detected scattering order and
possibly on the refractive index of the particle. Figure 6.36 illustrates a simulated
pair ofDoppler signals, shifted in time from one another.
Time-Shift Estimation Using the Cross-Spectral Density Function. A time shift
of At of a signal s(t) in time domain, with the Fourier transform 3{s(t)} = S(f),
yields in the frequency domain
3{ s(t- L1t)} = ~(f)exp(-j 2nfLlt)
(6.174)
For two signals SI (t) and S2 (t) = SI (t - L1tI2 ) with the time shift L1t12 , the gradient
ofthe phase in the quadrature spectrum Sl2(f) = arg(§.:(f)~2(f) is
332
6 Signal Detection, Processing and Validation
Receiver 1
o
-1
Receiver 2
o
-1
o
15
10
5
20
25
Normalized time [-1
Fig. 6.36. Time-shifted Doppler signals from two detectors
dS
df
12
= -2n Llt
(6.175)
12
where S;' (f) is the complex conjugate of SI (f). This relation has already been
used in section 6.4.1 for resolving the 2n ambiguity in phase difference determination for phase Doppler signals (Eq. (6.134». Therefore, the time shift estimation requires only a simple extension of the normal phase Doppler processing algorithm. First the cross-spectral density function of the two input signals is
computed. Close to the Doppler frequency, the phase of the cross-spectral density function is a linear function off A linear interpolation can be used to derive
the phase gradient at fD and thus, the time shift Llt12 • Example signals and their
cross-spectral density functions have been given in Fig. 6.27.
Estimation from Individual Arrival Times. In principle, the time shift between
two signals can also be estimated using the difference of their arrival times
(times of maximum amplitude). This requires an accurate estimation of the arrival times. Since the power spectral density or the autocorrelation functions of
each signal are statistical functions, they cannot retain the phase or absolute
time information, hence, they are not suitable to derive the individual arrival
times.
Although the power spectral density looses the phase or absolute time information, the Fourier transform itself retains this information, since the original
signal can always be reconstructed from its Fourier transform. The arrival time
t m of a signal s(t - t m ) can be interpreted as a time shift of the signal s(t) relative
to the time t =0, leading to a phase gradient, which is proportional to the time
6.5 Model-Based Signal Processing
333
shift or the arrival time respectively.
(6.176)
For a given discrete signal s(ti ) the discrete Fourier transform g{s(ti )} = S(fk)
is calculated. From the phase spectrum ?(fk) = arg(s.(!k»' the gradient of the
phase dose to the known Doppler frequency is estimated (after the correction of
the 21t ambiguity). The Doppler frequency can be estimated, as described previously, from the cross-spectral density. The arrival time then becomes
1 d?
t =--m
21t df
(6.177)
The time shift between two signals 51 (ti) and 52 (ti) can then be calculated
from the difference of their arrival times. Note that this procedure is similar to
the estimation from the cross-spectral density, since the phase of the product
S~(fk)S2(fk) is the difference of the two individual phases. Accordingly, the
phase gradient is proportional to the difference of the arrival times.
6.5.2.3 Dual-Burst Processing
When the partide size is large compared with the beam waist diameter in the
measurement volume of a phase Doppler system, it is possible to choose detector positions, such that not one but two signals are obtained on each detector for
each partide trajectory. These two signals may have varying degrees of overlap,
but originate from two different light scattering orders reaching the detectors.
Two redundant size measurements can therefore be performed, if the signal
processing is able to identify the change of phase within the overlapping signals.
Figure 6.37 illustrates a simulated dual-burst signal. Having redundant size
measurements provides possibilities for also determining the partide refractive
index. More details about the dual-burst phase Doppler technique are given in
section 8.2.4.
If the two overlapping signals are in phase, it is not difficult to estimate the
Doppler frequency, as demonstrated by the PSD shown in Fig. 6.38a. However, if
the signals are out of phase, the frequency estimate from the PSD can be erroneous, as illustrated in Fig. 6.38b. Figure 6.39 indicates, for the simulated signal in
Fig. 6.37, the expected deviation of the frequency estimate as a function of the
phase shift of the interfering signals. A three-point parabolic interpolation has
been used as an estimator. Note that the sharp jumps at -1t and +1t become less
sharp for noisy signals.
The only effective method to correctly estimate the Doppler frequency and
the phases of each of the signal portions is an iterative model-based procedure
(Nobach 1999). The two overlapping signals are modeled using the signal
s(t) = al
exq-17 (ti -tmS]cos(21tfDti +lPo,l)
(6.178)
334
6 Signal Detection, Processing and Validation
o
10
15
20
25
Normalized time [-I
Fig. 6.37. A simulated dual-burst signal
b
a
1.5
0.5 ,----r---,--.---.----,--,----.-----.-,----,
I
,
Q
~
1.0 r-
-
0.5 I-
-
0.0
o
2
Normalized frequency [-I
o
2
Normalized frequency [-]
Fig. 6.38a,b. The power spectral density of a dual-burst signal. a The signals are in phase,
b The signals have a phase shift of 180 deg
assuming that the Doppler frequency and the burst width are constant in both
portions of the signal. The burst width is defined using a fraction of the maximum intensity in each of the burst. Note that this signal model will not be ideal
for all trajectories. For a more general model, the burst width of each signal portion must also be modeled separately.
An initial parameter set is estimated by splitting the signal in the middle and
performing a conventional, non-parametric estimate of the frequency and phase
on each signal portion. These initial estimates are then used in an iteration procedure to minimize the L2 -norm
6.5 Model-Based Signal Processing
";;;'
335
2
<U
:E
-;
,/
:::u
<U
.§'1
c
oS
1;;
os;:
<U
~o
U
C
<U
6-
...
<U
~
-1
.,/'
-2
-180
-90
0
90
180
Phase shift [deg]
Fig. 6.39. Deviation of the Doppler frequency estimate (in number of spectrallines) over
the phase shift of the two in terfering signals
N-l
e(al'a 2'!D' 1J, fPool' fPool' tmol' tmoJ =
I[ s(t;) - s(tj)f
(6.179)
j=ü
In fact, exact solutions to this optimization problem can be found for the amplitudes a 1 and a2 • For the remaining parameters, a tangency algorithm, similar
to that described for the estimation of particle acceleration, must be used. Also
the convexity of the solution should be checked at each iteration step.
338
7 Laser Doppler Systems
7.1 Input Parameters from the Flow and Test Rig
The proper choice and layout of a measurement system can only be made if the
required temporal and spatial resolution for the velocity measurement are first
determined. For this, an intimate knowledge of the flow field being studied is required and the following section is devoted to reviewing the means of describing
flow fields. Quantities which are typically of interest to measure with a laser
Doppler system will be identified.
7.1.1 Description ofthe Flow Field
7.1.1.1 Equations of Motion
The laser Doppler instrument provides a field description (Eulerian) of the flow,
rather than a material description (Lagrangian). The measurement volume of
the laser Doppler system is fixed in space and does not foHow an ensemble of
material fluid elements l . The flow velocity vector ui is obtained at a particular
point in space, x j' at the time t
(7.1)
The equations governing the flow field are weH established and for a N ewtonian fluid, i.e. a fluid far which the stress on a fluid element is a linear function
ofthe rate of strain, they take the foHowing form (Spurk 1997):
• Continuity equation
Dp
dU i
-+p-=O
Dt
dX i
(7.2)
• Navier-Stokes equations
(7.3)
• Energyequation
(7.4)
1
This is not entirely correct, since the motion of tracer particles measured using the laser Doppler technique corresponds to the motion of a fluid element (Lagrangian).
However any changes of particle velocity over the measurement volume are usually neglected - one exception is the direct measurement of acceleration, as described in section 6.5.2.1.
7.1 Input Parameters from the Flow and Test Rig
339
where D / Dt is the material derivative
D
d
dt
d
' dx;
- = -+ u· Dt
d
dt
d
dX 1
d
dX 2
= -+ u - + u - + u
l
2
d
dX 3
3 --
(7.5)
P is the fluid density, b; are the components of the vectorial body force acting
on an Eulerian fluid element, pis the mechanical pressure, 1] and ..r are the first
and second coefficients of viscosity, e is the intern al energy of the fluid element,
A is the coefficient of heat conduction T is the temperature and t: is the dissipation rate of mechanical energy into heat (per unit mass), given by
(7.6)
with the symmetrie strain tensor given by
(7.7)
Henceforth, only the special case of incompressible and adiabatic flow will be
considered, in which case the governing equations can be written as
• Continuityequation
(7.8)
• Navier-Stokes equations
(7.9)
• Energy equation
De
p-=pt:
Dt
(7.10)
In non-dimensional form, using a typicallength scale (L) and velocity scale
(u), the Navier-Stokes equations take the form (omitting body forces)
du;
* dU;
dP*
1 d2 u;
--* +U j - - * =---* +--*--,
dt
dX j
dx;
Re dXjdX j
(7.11)
where the asterisk (*) denotes dimensionless quantities and the Reynolds number is given by
(7.12)
and represents the ratio of inertial to viscous forces.
340
7 Laser Doppler Systems
At high Reynolds numbers the last term in Eq. (7.11) can be neglected and the
Euler equation results, which is also valid for inviscid flows, V = o.
b
dP
P Dt -P;
Du; _
dx;
(7.13)
7.7.7.2 Description of Turbulent Flow Fields
Solutions in closed form can seldom be found to the above equations. Exceptions are simple one or two-dimensionallaminar flows or irrotational, inviscid
flows, known as potential flows. More common are high Reynolds number, turbulent flow fields, for which no simplifying measures can be taken.
Under these circumstances, the velo city field description is often modified by
averaging over space or time. The former leads to a Large Eddy ~imulation (LES)
description of the flow field, the latter to the Reynolds Averaged Navier ~tokes
(RANS) description. The RANS description is now considered further, since the
laser Doppler is not a good device for spatial averaging, hence, is seldom used in
conjunction with LES descriptions of the flow. For a RANS description of the
flow field, the instantaneous velo city is first split into a base flow and a fluctuation component (Reynolds decomposition)
(7.14)
where the overbar denotes an average over many flow ensembles,
u: kl •
-u,x"t=lm-L."u,
(
) 1. 1 ~ (kl( x"t )
I
]
N -'>=
N
k~l
I
(7.15)
]
For statistically stationary flow fields, this ensemble average value of the velocity is independent of time and can be replaced by the time average (principle
of ergodicity), as discussed in section 10.2.
(7.16)
The overbar will subsequently be used to denote this time average.
If also the pressure is treated in a similar manner, i.e.
P= p+ p'
(7.17)
and the rules for averages are adhered to
g=g,
g+f=g+f,
gf=g f,
dg
dS
-
dg
dS
-
the Reynolds equations are obtained from the Navier-Stokes equations
(7.18)
7.1 Input Parameters from the Flow and Test Rig
_ dU;
dP
d2 u;
d(pU;U;)
pu-=pb - - + 1 7 - J dx j
, dX;
dx jdX j
dx j
341
(7.19)
The last term in this equation, originating from the substitution U =U + U'
into the eonveetive terms on the left-hand side, resembles the gradient of a
stress, similar to the gradient of the viseous stress (seeond last term), and is
therefore plaeed on the right-hand side. The terms of the symmetrie tensor
pu;uj are known as the Reynolds stresses and are the foeus of most modeling
efforts in eomputational fluid dynamies (CFD). They physieally represent the
mean transport of the i th eomponent of momentum in the j th direetion due to
turbulent flow fluetuations.
A relative turbulenee intensity ean be defined for eaeh veloeity eomponent.
For example the x 1 eomponent is given by
Tu 1 =
,,),Y;
(U1U 1
_
(7.20)
U
where again, u is some representative flow veloeity, perhaps a mean inlet flow
velo city or an undisturbed flow velo city outside of a boundary layer. The overall
turbulenee intensity is given by
-,,),Y;
1 (u; u;
Tu=
3
u
(7.21)
If the turbulenee is isotropie then u{u{ = u~u~ = u~u~ and Eq. (7.21) reduees to
Eq. (7.20). A further quantity of interest is the turbulent kinetie energy (per unit
mass)l
1-,-,
Bk = "2 UjUj
(7.22)
whieh is also an invariant of the stress tensor. Sinee many statistieal turbulenee
models are based on the loeal variations of Bk' it is a quantity of great interest to
measure. From Eq. (7.22), it is clear that all three eomponents ofvelocity are required for this; however, often eompromises are made. If only two eomponents
are available, for example, u1 and u2 , the third eomponent is estimated as the average of u1 and uZ ' leading to
(7.23)
A general transport equation for the Reynolds stresses ean be derived from
the Navier-Stokes equations (Hinze 1975) and, negleeting body forees, ean be
written as
1
Turbulent kinetic energy is often designated with k. To avoid confusion with
wavenumber, Bk has been used here.
342
7 Laser Doppler Systems
dU;U;
dt
+
-dU;U;
Ul~
'---v----'
'-y-J
change with time convective transport
=_~(u;u~u~)_~(dU;P + dU;P)
dX 1
"
\
P dX j
v
prod~ction
,
I
diffusive transport
- du. - dU P ( dU' dU~)
dU~dU~
d (dU~U~)
-u~u;--' -u~u;-j +- --' +--' -2v--'- ' +v- -'-'
'dX/
'dX 1 P dX j dX j
dX 1dX 1
dX 1 dX 1
,
dX j
'--v---------'
'----y----J
~
pressure I
strain coupling
dissipation
molecular
diffusion
(7.24)
The special case of i = j yields a transport equation for the turbulent kinetic energy Ek
(7.25)
In turbulence models, many of the terms in the above equations must be approximated with semi-empirical expressions (e.g. Wilcox 1993, Ferziger and
Peric 1996) and these must then be validated in se1ected test cases by direct
measurements. Besides requiring a direct measurement of the Reynolds stresses,
this places demands on the determination of gradients, which, using a point
measurement technique, is achieved by an appropriate choice of measurement
point grid spacing. Clearly, regions of the flow with higher gradients and second-order gradients require a finer mesh of measurement points.
If the velo city fluctuations in the x j and x j directions are completely independent of one another, all products u;uj are zero. A measure of the degree of
dependence is the correlation function 1
(7.26)
or the normalized correlation function
(7.27)
Even more general is the space-time correlation function
Rjj(x k ,t,Tk' r) = u;(x k ,t) u;(x k + Tk't+ r)
(7.28)
or its normalized function
(7.29)
1
The correlation function, when computed using fluctuating quantities (with the mean
removed) is called the covariance function. Further remarks about the correlation
function can be found in section 10.1
7.1 Input Parameters from the Flow and Test Rig
343
The temporal correlation function is obtained for rk = 0, the spatial for T = o.
The Reynolds stresses, as appearing in Eq. (7.19), are seen to be a special case of
the space-time correlation function, when both rk = 0 and T = o.
For rk very large, the velo city fluctuations become statistically independent
from one another and the correlation function goes to zero. A measure for the
spatial correlation extent, the integrallength scale, is given for the u1 velo city
component by
(7.30)
In a similar manner, the integral time scale can be defined as
(7.31)
This quantity can be graphically depicted as shown in Fig. 7.2.
Information about the smallest scales of motion in a fluid can be obtained
through dimensional arguments (Tennekes and Lumley 1972). At the smallest
scales of motion, turbulent kinetic energy is dissipated into intern al energy
(heat) through the action of viscosity. Considering the units of viscosity
v[m 2 s- 1 ] and dissipation rate per unit mass c[m 2 s-3 ], a length scale can be obtained as
_(~)X
7J K -
c
(7.32)
7JK is known as the Kolmogorov length scale. A corresponding time scale is
given by
1.0
0.5
O.O .J.......--='
r : : ; - - - - - - - - - - - - - - - -~
Tu
l
11
Fig. 7.2. Definition of the integral time seale and the Taylar microseale
344
7 Laser Doppler Systems
(7.33)
and a veloeity seale by
(7.34)
Note that a Reynolds number built on these seales yields
Re= 'hvK =1
(7.35)
V
If the typieal kinetie energy of large seale motions is given by U /2 and they
lose this energy in a typical time seale of L / u, where L is a maero length seale of
the flow, the rate of energy loss (per unit mass), whieh must be equal to the dissipation rate (per unit mass) on average, is given by
u2 U u 3
t:=--=2 L
(7.36)
L
Thus the ratio of the smallest to largest seales of motion in the flow is equal to
(7.37)
This relation is of utmost importanee for subsequent eonsiderations, sinee it allows an estimate of the ultimate spatial resolution required from the measurement system in order to eapture all seales of motion, in terms of known quantities, u, L and v.
The dissipation rate per unit mass of turbulent kinetie energy, t:, is an elusive
quantity at best. It ean be written as
!...=2(~)2 +(dU2)2 +(~)2 +(~)2 +2(dU2)2 +(dU3)2
v
dX
j
---
dX
j
dX
j
dX 2
dX 2
dX 2
---
(7.38)
+- +- +2 - )2 +2--+2--+2-( dU )2 (dU 2)2
dX 3
dX 3
j
(dU 3
dX 3
dU dU 2
dX 2 dX j
j
dU dU 3
dX 3 dX j
j
dU 2 dU 3
dX 3 dX 2
There have been very few attempts to measure so me or all 12 terms with either
hot-wire anemometry (Browne et al. 1978) or with a laser Doppler system
(Benediet 1995).
Not only are nine different gradients to be measured, but the seal es at whieh
these must be evaluated are of the order of 11h to 5 rh. If the turbulenee field is
loeally isotropie, Eq. (7.38) ean be approximated by (Hinze 1975)
(7.39)
7.1 Input Parameters from the Flow and Test Rig
345
whieh requires information about only one velocity gradient. This gradient ean
be aequired in many eases indireetly, using the Taylor hypo thesis. If «~,
spatial velocity fluetuations will appear almost undistorted as temporal fluetuations when these are rapidly conveeted through the measurement position by
the mean flow. Thus, t= x /uor
u;
d
dx
1 d
(7.40)
e.g.
u dt
The temporal gradient is mueh easier to aequire than the spatial gradient,
sinee it requires only a single measurement position and ean be computed direetly from the measured time series of velo city.
A second method of estimating the velo city gradient term is direetly through
the spatial eorrelation function
(7.41)
Using the notation
(7.42)
for the spatially averaged mean square of the veloeity fluetuations and a Taylor
series expansion, the eorrelation function ean be approximated as
(7.43)
or
(
{0) [1- Pii(xj,r
2
du
k )]
)
dr:
hl
(7.44)
2
whieh requires a measurement of Pii (x j ,rk ), i.e. a two-point veloeity measurement with the two measurement positions separated by the veetor rk • If the
Taylor expansion is not used, then the spatial derivative is given by (Hinze 1975)
d;;;; I.
k
rk
==0
U~2 (~~; )2
i
(7.45)
k
rJ..
=0
This suggests that several two-point measurements must be performed with
varying rk in order to measure the parabolie behavior of the eorrelation function
at small values of rk • If a length seale A;;,k is defined as
346
7 Laser Doppler Systems
Ir; 1
2
p;; (r)
= 1- ----;2 ,
2/1.
ji,i
p.(r )=1- Irk l2
/I
k
/l.? ii,k
(7.46)
then
(7.47)
where /1;;;,k is known as the Taylor microscale (Taylor 1935) and represents the
average dimension of eddies responsible for dissipation, Thus, the homogeneous dissipation rate per unit mass may be determined by parabolic fits to the
nine different two-point correlation functions,
7.1.1.3 Velocity Spectra
All of the flow quantities discussed above can be considered either velocity amplitude related measures or measures related to the spatial structure of turbulent
flow fields, Spatial structures, whether quasi-statie (Taylor hypothesis) or dynamically changing, when convected by a velo city measurement point, will result in temporal tluctuations of velo city, Thus, information about the distribution of energy over different length scales will be available through a frequency
domain analysis of the velocity time series. The question remains, how much of
the spatial information is recoverable from a single-point, or multi-point velocity measurement?
The spatial correlation functions R;j(xk,t,rk,O) already carry complete information about the spatial tlow field structure. The Fourier transform of these
functions over all possible separations, rk' yields the wavenumber spectrum tensor (or velocity-spectrum tensor.) (Tennekes and Lumley, 1972)
(7.48)
where the overbar denotes time average and the j in the exponential is ? = -1,
not the index j. k; is the wavenumber vector with components k; = 21t I /1;;, /1;;
being the wavelength of the disturbance1• The sum of the diagonal components
of (JJ;j' i.e. QJIl + 1/J 22 + QJ33 represents the total kinetic energy per unit mass at a
given wavenumber.
The directional information can be removed by integrating over spherical
surfaces of radii Ik; 1= k , yielding the energy spectrum
1
A; is a wavelength, not to be confused with A, the coefficient ofheat conduction in Eq.
A;;,k> defined in Eq. (7.46).
(7.4) or with the Taylor microseale,
7.1 Input Parameters from the Flowand Test Rig
B(k) =.!.
2
JJ lP;;{k) ds
347
(7.49)
5
The integral of this three-dimensional energy spectrum over all k is equal to the
kinetic energy per unit mass.
(7.50)
Thus, B(k)dk is the contribution to Bk from all wavenumbers within a shell of
radius k <Ik i I:::; k + dk.
The dissipation rate per unit mass can also be related to the wavenumber
spectrum through (Pope 2000)
JlJ2Ve "21 lP (k
=
&=
ii
j )
(7.51)
dk j
Generally, it is not feasible to measure the three-dimensional, threecomponent wavenumber spectrum, since this involves spatial correlations of all
velocity components with separations in all directions. Most measurements involve one-velocity component, one-dimensional spatial correlations or onevelo city component, time correlations, after which Taylor's hypo thesis is used to
relate these to spatial correlations in the main flow direction. The most common
spatial correlations are Rn (rp r2 = 0,r3 = 0) and R22 (rpO,O), where the main flow
direction is along the x j axis. These correlation functions are called the longitudinal and transverse correlations respectively and examples are depicted schematically in Fig. 7.3.
The corresponding longitudinal and transverse spectra are
JR
2n
~ll (k = j )
1
+=
•
ll
(7.52)
(rj ,0,0 )exp( -J k j r j ) drj
_=
(7.53)
Transverse correlation function g (r):
Longitudinal correlation functionf(r):
Mainflow~
Mainflow
~,
directio~ u;.
ui
direction
~._._._.~~-
(u;)'
~rl
(u; )'
~
=> :--:::~ -;,;U;
rj
r
Fig. 7.3. Longitudinal and transverse correlation functions
r
348
7 Laser Doppler Systems
The longitudinal integral length scale can be directly related to the onedimensional longitudinal spectrum through
r/l11 (0)
L _
u -
TC
(7.54)
(U;2)
Also, the Taylor microscale ,111,1 can be estimated from the normalized time
correlation function. This microseale divided by the mean convective velo city
corresponds to the intersection of a parabolic fit to the time correlation at small
T values with the x axis, as shown in Fig. 7.2
For isotropie turbulence, the one-dimensional spectrum can be related to the
energy spectrum through (Hinze 1975, Batchelor 1953)
~ E(k)=e~(! dr/l11)
dk k dk
(7.55)
If the Kolmogorov similarity hypotheses are applied, even more convenient
forms for the one-dimensional spectrum can be obtained. The first hypo thesis
states that the statistics of velocity fluctuations in the equilibrium range of
wavenumbers are uniquely determined by c and v. The equilibrium range of
the spectrum comprises all wavenumbers above the so-called energy containing
wavenumbers. The second similarity hypo thesis relates to the inertial subrange,
within which a universal form for the spectrum can be expected, dependent only
on c. The inertial subrange is that portion of the equilibrium range extending
up to wavelengths responsible for dissipation. Within this range, the following
functional relations hold (Bradshaw 1971, Pope 2000)
E(k)=C c~ k- X
C= 1.5
(7.56)
r/l 11 (k)
= C1 c~ k1 -X
1
Cl ",,0.49
(7.57)
r/l 22 (k)
= Cl1 c~ k1-X
1
C: "" 0.65
(7.58)
where the constants have been empirically deterrnined. These expressions provide a means for estimating the dissipation rate c from measured, onedimensional spectra. The inertial subrange of the spectrum, exhibiting a -5/3
slope with k 1 , can be extrapolated to k 1 = 1 and c can be directly computed from
the value of the extrapolation at that point.
The energy-containing range of the spectrum below the inertial subrange and
the dissipative range above, can also be incorporated into a model spectrum
covering all wavelengths. One such model spectrum, discussed by Pope (2000) is
given by
(7.59)
with the energy-containing function
7.1 Input Parameters from the Flow and Test Rig
349
Po is taken as 2 and CL is a positive eonstant. Lk is the length seale Lk = k 3/ 2 I e.
IL tends to unity for large k.
Furthermore, the dissipative range is deseribed by
(7.61)
where ß and c'l are positive constants. For small k1J this function also tends to
unity, thus reducing Eq. (7.59) to Eq. (7.56) in the inertial subrange. Experiments at high Reynolds numbers have yielded the empirieal values ß = 5.2,
c'l = 0.40 and CL = 6.78. Figure 7.4 summarizes the speetral behavior of isotropie
turbulenee for a Reynolds number based on the Taylor mieroseale of Re,! = 500.
E(k)
105r-""TITIr-""TITIr-~~rr=--~~~-.~~~-.~~~
1Jv'
10'
10'
10'
10
Fig. 7.4. Model spectrum for Re 4 = 500 (Eq. (7.59»
7.1.1.4 Turbulent Boundary Layers
From dimensional arguments and experimental data, the mean velocity profile
near the wall seales with the Ioeal wall shear velo city ur' given by
(7.62)
where r w is the wall shear stress defined by
350
7 Laser Doppler Systems
(7.63)
The coordinate system for boundary layer investigations is chosen, such that
the x axis lies in the main flow direction parallel to the wall and y is normal to
the wall. The universallogarithrnic law of the wall describes the velo city profile
of a turbulent boundary layer and applies over a wide range of Reynolds numbers.
U
1
ur
Ur
K
V
- = - 1ny-+C
(7.64)
often written as
1
u+ =-lny+ +C
(7.65)
K
u+ = Tl / Ur and y+ = YU r / V are known as wall coordinates and K takes the approximate value 0.41 (von Karm1m constant). Cis a constant which can be empirically determined for various flow types and can also vary with pressure gradient. Equation (7.65) is valid in the approximate range y+ > 30, with the upper
limit being flow dependent. Graphically, the entire mean velo city profile takes
the form shown in Fig. 7.5, indicating also an inner viscous sublayer (0< y+ < 5)
and an intermediate (buffer) region (5< f < 30). The viscous sublayer is dominated by viscous forces (over inertial forces) and exhibits a linear velo city profile.
.-::
25
~
'ü
0
20
~
,/
~
'"
'"..E:
/
15
0
Z
10
~
~
5
0
I
10
100
Norma lizcd wall distancc
Fig. 7.5. Logarithmic law-of-the-wall for turbulent boundary layers
1000
y· '-1
7.1 Input Parameters [rom the F10w and Test Rig
351
2
-
Ur
u=-y
(7.66)
V
which also provides a method of measuring Ur (or r w)' provided the spatial
resolution is sufficient to resolve several points in this layer, a topic addressed in
the following section.
A somewhat more useful relation for deterrnining ur from a data fit was proposed by Durst et al. (1996)
2
u=.!:!..!..(y- Yo)+C 2(y- YO)2 +C 4(y- Yo)4 +Cs(Y- YO)5
(7.67)
V
which is valid up to about y+ < 12. C2 , C4 and C s are constants. For pipe or
channel flows C2 =
2R V where R is the pipe radius or the half-channel
height. This estimate satisfies the momentum equation and as such provides a
more reliable basic for ur' This expression allows both ur and the effective origin of the y translation to be approximated simultaneously
-u; /
7.1.2 Necessary Spatial and Temporal Resolution
The spatial and temporal resolution of a laser Doppler system depends on the
opticallayout, the signal detection electronics, the validation scheme and the
particle seeding. Furthermore, there are several subtle interconnections between
the spatial resolution and the temporal resolution. Before proceeding to the layout of the laser Doppler system therefore, it is advisable to estimate the necessary spatial and temporal resolution, as dictated by the flow field and by the desired measurement quantities and their corresponding measurement accuracy.
7.1.2.1 Spatial Resolution
The flow field dictates the necessary spatial resolution. There are basically three
situations to consider, not all of which may be important for a particular application. The three situations are as follows:
• Measurements, where a mean velocity gradient exists across the detection
volume
• Measurement of central moments at a position free of mean gradients
• Measurement of spatial correlations (two-point measurements)
The last of these situations will be discussed separately in section 7.4.4.
Measurements with a Mean Velocity Gradient. Any validated particle passing
through the detection volume of the laser Doppler system will contribute to the
computed statistics. At first glance, any overall statistic rp will therefore be a
volume-time integral ofthe desired quantity.
fPDV
=
lim..!:..fT(_1 frp(x; ,t) d Vd]dt
T->=T o Vd
Vd
(7.68)
352
7 Laser Doppler Systems
There are two reasons why this might not be so straightforward. First, the laser Doppler system does not deliver a velo city for all positions along a partide
trajectory lying within the detection volume, but only a single velo city. How this
value relates to the actual velocity experienced by the partide across the volume
will depend on specifics oE the signal processor and possibly the trajectory itself.
The second problem with a simple volume integral is that the prob ability of
certain trajectories may depend on the flow field. For instance regions of higher
mean velocity within the detection volume may experience a higher number of
particle occurrences than regions of low velocity. This can lead to a systematic
bias of moment estimators and will be discussed briefly at the end of this section. For the present discussion, this effect will be neglected, meaning that the
absolute difference of the mean velo city occurring throughout the detection volurne is assumed small compared with the mean velo city, hence the partide arrival rate across the detection volume is constant. Particle concentration gradients
across the detection volume will also be neglected.
However, the first difficulty remains and some simplifying assumptions will
be made before continuing, most of which are quite reasonable for many applications. This treatment paralleIs closely that given by Durst et al. (1993, 1995,
1998).
• The seed particles are monodispersed, resulting in the same detection volume
for all velo city values
• The detection probability is unity for any particle trajectory cutting any section of the detection volume. In some cases, this assumption will require a
frequency shift to insure that sufficient signal periods are available for the
processor to validate the signal.
The situation to be considered is illustrated in Fig. 7.6. The main flow direction is parallel to the Xl axis. A mean velocity gradient exists in the x 2 direction
only. Partide trajectories are dose to parallel with the Xl axis; in any case, all
1
X
il--__--!~
J\lean vclocity gradient
II,(X,)
.......
(//
,,
~rl,; ......... ~..._
..~..-
·······················--·-i - .
I
7
Paniclc I rajeClory
DC1CCI io n volumc
~---,'----.,
.... .......
_ _1
1-
Deleclion
volume
dia meier
2b.
Registered veloci t y
v-aluc
Fig. 7.6. Mean flow velocity gradient across a laser Doppler detection volume
7.1 Input Parameters from the Flowand Test Rig
353
particle trajectories are assumed to pass through the center plane of the detection volume XI = xI,c' The registered velo city for each particle corresponds to the
velo city value when the particle is in the XI = xI,c plane, thus the XI and x 3
variation of velo city is removed from the problem.
The volume integral now becomes an area integral of the quantity of interest
over the detection area lying in the XI = xI,c plane (A d ). Generically, the mean
value of some quantity rp over the detection volume (DV) becomes
(7.69)
The overbar denotes temporal averaging, the subscript (DV) denotes averaging
over the detection volume, in this case achieved with an area integral. The integration is performed over the x 2 and x 3 directions. A d is the total area of integration.
Two integration areas will be considered. In the one case the detection area
on the XI = xI,c plane will be considered an ellipse, in the second case a rectangle.
These two areas are pictured in Fig. 7.7, the latter corresponding to a measurement volume truncated about its x 3 center, for instance using a slit aperture in a
receiving optics placed in side-scatter. The projected slit half-width is denoted
by c~.
If the time and area integrals in Eq. (7.69) are reversed in order, then the
mean value 7j5 will be a function of x 2 only, i.e. 7j5 = 7j5(x 2 ). Then the integration
over x 3 can be carried out and this results simply in the x 3 width of the detection volume. For elliptic and a rectangular detection volumes, Eq. (7.69) becomes respectively
2
_
rpDV
2
=;t;
X2"J+ bd _
d x",-b d
rp 1
(X 2 - X2,c ) d
2
bd
X2
(7.70)
(7.71)
These integrals can now be evaluated for various measurement quantities, 7j5.
The mean and fluctuating flow velo city will be examined, as defined by Eqs.
(7.14) and (7.16). The mean velocity can be expanded in a Taylor series about its
value on the centerline,
(7.72)
which, when inserted into Eqs. (7.70) and (7.71) for 7j5 and evaluated up to second-order terms, yields for the elliptic detection area
354
7 Laser Doppler Systems
b
a
Rcfcrencc pla ne
Deleclion
volumc
x,
Rcctangular
dClccl io n arca
/
DCICClion
volumc
flow
dircclio n
Elliplical
dctcct ion a rca
X~.,(
l"
Dirccl io n of
obscrval ion
. . . . . . . . . ._ CJ~d
Ao
I\.
xl .(
Fig. 7.7a,b. Detection area on the
rectangular detection area
XI
=
XI,c
plane. a For an elliptic detection area, b For a
(7.73)
and for the rectangular detection area.
(7.74)
These two expressions indicate the first-order difference between the measured
mean velocity and the actual mean at the center plane of the detection volume.
For a linear mean velocity gradient, no error occurs since the second derivative
in Eqs. (7.73) and (7.74) is zero. In narrow channels with strong spatial velo city
gradients however, this linear assumption may be invalid and the detection volurne dimension bd must be decreased a,ccordingly. Alternatively, Eqs. (7.73) and
(7.74) can be solved for TI; (x 2 .c>, in which case the gradient terms bemme correction terms to the measured me an velo city UI,DV'
7.1 Input Parameters from the Flow and Test Rig
355
The fluctuating velo city registered over the detection volume is the difference
between the instantaneous velo city and the mean value over the detection volurne
(7.75)
whereby Eqs. (7.73) or (7.74) can be used to substitute for U;,DV' ul(xj,t) can be
divided into a mean (U; (x;» and fluctuating part (u~(x j,t», and the fluctuating
part can be expanded in a Taylor series about the plane x 2 = x 2,c' yielding
(7.76)
_(
- l<t x 2 c
,
)
2
-
bd
d 2U;(x 2 )1
X
2
dX 2
{1/8 forellipsoidaldetectionvolume
1/6 for rectangular detection volume
X2=X 2 ,c
Ifnow the integrals Eqs. (7.70) and (7.71) are evaluated with 7p=U{2(X2) and
only second-order derivatives are retained, the measured mean square velocity
fluctuations for an elliptic detection area will be
(7.77)
and for a rectangular detection
(7.78)
These equations indicate that the second-order moment must always be corrected in a shear flow and that this correction can be significant, for example in
wall boundary layers (Durst et al. 1998).
Similar expressions can be derived for high er order statistics. For third and
fourth order statistics and for an elliptic detection area, Durst et al. (1998) give
the following expressions.
(7.79)
356
7 Laser Doppler Systems
(7.80)
In these expressions, the mean velo city gradient dominates over the error terms
involving gradients of velo city correlations. Hence, for purposes of correction,
only terms involving the mean velo city are retained.
IfEqs. (7.73), (7.74), (7.77)-(7.80) are used for correcting measured data, then
both the detection volume dimension bd and the mean velocity gradient
du I dX 2 must be known. To determine bd , Durst et al. (1998) suggest performing measurements with the optical system in question in a laminar tlow, in
which the velo city gradient is linear and is easier to evaluate. Equation (7.77) becomes
-U'-2- =
I,DV
b~ _d_u_1 (-,--X_2--,--) 2
1
4
dX 2
(7.81)
X 2 =X 2 ,c
since there are no velocity tluctuations present. This can be re-arranged to relate
the 'apparent' turbulence intensity to the mean velo city gradient through the parameter bd
(7.82)
By plotting the left-hand side of Eq. (7.82) against ~ul~bvdUj(X2)/dx2Ix2=x2'
the effective detection volume half-axis can be determined from the slope of the
resulting straight line.
In a simple laminar tlow, the mean velocity gradient is usually simple to estimate from preliminary measurements. If a laminar tlow is not available for
'calibration' of the system, then the mean velo city gradient must be estimated
directly from the measurements, possibly employing an iteration step together
with the correction expressed in Eqs. (7.73) or (7.74).
In a turbulent boundary layer, it is helpful to express bd in wall coordinates,
l.e.
d
bd+_u,b
-
(7.83)
v
from which the correction (7.7l) becomes
for y+ < 5
(7.84)
7.1 Input Parameters from the Flow and Test Rig
357
Clearly, a direct measurement of T w requires a measurement volume of the
order,
1. This criterion illustrates the fact that the choice of measurement
volume size will depend on the Reynolds number of the flow, since Ur is Reynolds number dependent. More general recommendations about the required
spatial resolution in turbulent boundary layers have been put forward by
Karlsson and Johansson (1988) in terms of the viscous length scale [+ = V I ur.
Here a dimension normal to the wall of sI and parallel to the wall of eS 10[+
is recommended (see also Johansson and Barlow 1989).
b; ::;
b;
Measurement of Moments at a Position with no Mean Velo city Gradient. The
second situation, for which the spatial resolution of the laser Doppler system
must be considered, is when turbulence quantities are to be measured at a position free of mean velocity gradients. In general, all scales of turbulence will be
resolved for detection volume dimensions less than the Kolmogorov length scale
l]K" This suggests a smaller detection volume for a high er Reynolds number
flow, as expressed by Eq. (7.37) However, unlike a hot-wire anemometer, the laser anemometer is not a spatially integrating instrument, at least if the particle
concentration is such that only one particle at once is in the measurement volurne (single realization). Therefore, there are no extra considerations with respect to detection volume size demanded for this situation.
7.1.2.2 Temporal Resolution
The required temporal resolution depends very much on the flow quantities of
interest. As a measure of temporal resolution the data density is used, which refers to the number ofvalidated signals per integral time scale, Tu (Eq. (7.31) expressed as NT", where N is the validation rate of particles. The temporal resolution is adjusted primarily through the seed particle concentration. Moments can
be estimated for all data densities, although in chapter 11 it will be shown that
the respective estimator must be carefully chosen because so me estimators can
exhibit a statistical bias, depending on the data density. Chapter 10 will discuss
the fact that for moments, a data density above approximately one-half does not
result in a significantly faster convergence of the result. Thus, in terms of optimizing measurement time for obtaining moments, a data density of about
NT" = 0.5 is desirable. Anything lower just increases the overall measurement
time. Anything higher increases the amount of data to be processed, without
improving the overall measurement accuracy. Therefore, some apriori information about the local integral time scale, Tu' is required when selecting the
particle concentration.
There will also be an inverse relation between the spatial and the temporal
resolution, since as the measurement volume is made sm aller, the particle rate
will decrease, given the same particle concentration. This relation is modified
further by the signal processing, since the detection prob ability will depend also
on signal intensity, signal duration and possibly on the number of periods in the
signal. More recent signal processing electronics have been successful in minimizing these secondary influences.
358
7 Laser Doppler Systems
For estimation of frequency spectra or time correlations, the necessary temporal resolution again depends strongly on the estimator used. The choice of estimator is particularly important because of the random time sampling of the
velo city, a unique feature of the laser Doppler and phase Doppler techniques.
Conventional estimators result in non-biased results up to frequencies of the order IV /2n (Adrian and Yao, 1987). More re cent estimators, as discussed in sections 11.2 and 11.3, can extend this range to a frequency of IV or even above, if
long data records are available. The long data records are necessary to achieve
acceptable levels of estimator variance. As a comparison, for data sampled at
regular time intervals, an unbiased and unaliased spectral estimate is possible
only up to a frequency of IV /2 (Nyquist frequency), provided no energy above
the Nyquist frequency is present in the signal.
The highest frequencies which occur in the velocity signal are associated with
the smallest scales of turbulence being convected through the measurement
point with the mean velo city. Tennekes and Lumley (1972) derive an upper limit
of the inertial subrange as krh '" 1, as also seen in the generic spectrum shown
in Fig. 7.4. Accordingly, Eq. (7.37) yields for the maximum occurring frequency
of velo city fluctuations, corresponding to the smallest flow structures,
- -U- Re 3/4
f max 2nL
(7.85)
where L is a macroscale of the flow. To resolve the dissipative range of the spectrum, a frequency resolution up to imax would be necessary, hence with an appropriate spectral estimator, N '" fm=. This limit can now be used to choose an
appropriate seeding concentration, as discussed in the following section.
7.1.3 Flow and Flow-Rig Parameters
Some very basic information about the flow rig will influence the opticallayout.
For instance, the necessary stand-off distance between the planned measurement positions and the transmitting or receiving optics will directly influence
the choice of front lens focallength. All traversing clearances, clearances for accessing or cleaning windows, ete. must be considered. üf course the physical
dimensions of the flow rig and the optical access available will determine
whether forward, backscatter or side-scatter arrangements are possible.
Depending on the medium, the penetration depth and the wavelength of the
laser, the extinction must be considered when choosing the laser power to
achieve a given intensity in the measurement volume. The extinction is expressed as an exponential decrease of intensity.
[= [0
exp(-ßx)
(7.86)
where ß[m-11 is the extinction coefficient. Some typical values for water at various wavelengths are given in Table 7.1. Also the corresponding penetration
depth at which the bearn intensity has been attenuated to e-1 times its initial
7.1 Input Parameters from the Flow and Test Rig
359
value is given in Table 7.1. It is clear that the extinction increases dramatically in
water at higher wavelengths, thus restricting the use of laser diodes for liquid
flows.
Table 7.1. Extinction coefficients ß and penetration depths x (e -I intensity loss) for pure
water (#Buiteveld et al. 1994, *Pope and Fry 1997)
Wavelength
Ab [nm]
632.5*
527.5*
515*
487.5*
Pure water
Extinction
coefficient
Penetration
depth
ß
x(e- I ) [m]
[m- I ]
2.293
0.2995
0.0428
0.0396
0.0144
0.436
3.34
23.4
25.3
69.4
Another very basic quantity to consider is the velocity range to be measured.
This has an indirect effect on spatial resolution through the Reynolds number,
but influences more directly the required frequency shift and the required
bandwidth of the processing electronics. Most commercial laser Doppler systems realize a frequency shift using a single Bragg ceH and electronic downmixing before processing. Thus, the choice of frequency shift becomes a simple
user input. However, systems with double Bragg ceHs or with a rotating grating
must be designed specifically for a narrow range of possible shift frequencies.
The shift must be chosen to insure that all flow velocities encountered will result in a unique (positive) frequency and furthermore, that a reliable estimation
of the signal frequency can be performed by the available processor. The first
criterion means that the fringe movement against the main flow direction must
be faster than any negative velocities that occur. This is most easily understood
in terms of frequencies. The signal frequency seen by the receiver, Ir' is the sum
of the shift frequency and the Doppler frequency (Eq. (2.36».
I
I r=Ish+ u-L2sin~ =Ish+D
Ab
(7.87)
and the requirement is that Ish >lID I, typically Ish >21IDI, for the lowest (negative) velo city. The laUer condition considers flow from all directions. This requires some pre-knowledge of the flow properties at the measurement point. If
measurements are to be performed automatically at many positions in sequence,
then the chosen shift frequency must fulfil this requirement at all the measurement points. The concepts discussed in section 5.1.5 can be used to help choose
an appropriate shift frequency for a given application.
The expected frequency range of the signal at the detector must also fall
within the allowable bandwidth of the processor. In some cases, frequency
shifting can be used to better match signal bandwidth to processor frequency
range. Note that although the signal frequency is influenced by a frequency shift,
360
7 Laser Doppler Systems
the signal duration is not. It is influenced only by the velo city and the trajectory
of the particle through the measurement volume.
Some processors are dependent on identifying a minimum number of signal
periods, typically 8 or 16. Thus, the shift frequency must exceed the condition
ish >lid I accordingly. This requirement has been discussed in section 5.1.5.
More recent signal processors operate reliably also with fewer signal periods;
however, the shift frequency must still be chosen such that the condition
ish >lid I is exceeded.
The maximum positive velocity can also be an important design parameter if
the expected frequencies approach the bandwidth ofthe signal processor. In this
case the interference fringe spacing must be increased,
L1x=~
2sin%
(7.88)
normally by choosing a smaller intersection angle. In exceptional cases such as
supersonic flows, a forward frequency shift is employed to lower the signal frequency for a given flow velo city, with a corresponding decrease of signal periods.
Far well-directed flows or situations in which two velocity components are
measured simultaneously, a higher maximum velocity can be reached by rotating the optics with respect to the main flow direction. An angle of 45 deg results
in a ..fi increase in the allowable velo city magnitude.
Two important considerations related to the particle seeding are dictated by
the flow rig and the flow properties. The first concerns the ability of the particles
to follow the expected velocity fluctuations. This is determined by the size and
composition of the particles and by the ratio of the particle density to the density of the flow medium. These influences are discussed fully in section 13.1.
The second issue is that of the required particle concentration. The concentration is chosen on the one hand high enough to meet the required temporal
resolution requirements and on the other hand, low enough to insure single realization operation. Single realization operation is achieved when the probability
of more than one particle occurring simultaneously in the detection volume is
less than 0.5%. Assuming a random homogeneous distribution of the particles,
the prob ability of having Np particles in a volume V will, according to Eq.
(5.166), follow a Poisson distribution
(7.89)
where Np, the Poisson parameter, expresses the mean number of particles simultaneously in the volume, or in terms of the mean concentration np
(7.90)
The conditions required to insure single realization have been discussed in
section 5.1. 7 and lead to the result Np < 0.1, if V corresponds to the volume of the
detection volume Vd • In terms of concentration this becomes
7.1 Input Parameters [rom the Flowand Test Rig
_
0.1
np s Vd
361
(7.91)
For an elliptic detection volume this becomes
(7.92)
Here, a d , bd and Cd are the dimensions of an assumed ellipsoidal detection volurne, rw is the beam waist radius, g is the intersection angle and Pd is the scaling
factor between the dimensions of the detection and measurement volume (Eq.
(5.42) and Fig. 5.9).
As an example, the measurement volume used in section 5.1.2 is examined,
assuming also that the measurement volume dimensions correspond to the detection volume dimensions (e.g. Fig. 5.9 for d p < 5 11m and Pm;" = 10-6 W):
rw=5011m, o/z=2deg, ad=5011m, bd=5011m, cd =l.4mm, Vd =0.015mm 3 •
The particle concentration must therefore be below Tfp S 0.1 / Vd = 6.7 mm 3 •
While the upper limit for Tfp is determined by the single realization constraint, the lower limit depends on what quantity is to be measured. For the
measurement of moments, no lower limit is mandatory; however, a lower particle concentration will lead to a lower particle rate, hence, a longer measurement
duration to reach a given accuracy. Exact expressions for the measurement accuracy are presented in section 10.3.2. An optimal rate is NT" = 0.5, as discussed
in the previous section. For particle trajectories perpendicular to the interference planes in the measurement volume, the mean particle rate and the mean
particle concentration are related through the mean velo city, Tl,
N = rrb d Cd np u = A d np u
(7.93)
leading to a lower bound on Tfp of
0.5
n =--p
Tu uA d
or
(for an ellipsoidal volume)
(7.94)
Since the integral time scale, Tu' and the mean velo city Tl are not uniquely
related, no further simplification is possible. For the measurement of moments
therefore, the bounds on Tfp can be summarized as (für an ellipsoidal volume).
(7.95)
Corresponding expressions for A d and Vd will be necessary if the detection
volume is not ellipsoidal, for instance if the illuminated volume has been truncated by the use of slits or pinholes in the focal plane of the receiving probe.
From Eq. (7.95) an absolute lower bound on the resolvable integral time scale
can be derived, i.e. when the lower and upper bounds on Tfp are equal
362
7 Laser Doppler Systems
T > Fdrw
u
0.15u
(7.96)
which simply states that sm aller integral time scales can be resolved if the detection volume dimension is made smaller, either by increasing the detection
threshold or reducing the laser beam diameter.
Far the measurement of turbulent velo city spectra, the lower limit for the
mean concentration np must be chosen according to the highest frequency
which is to be resolved and the capabilities of the chosen estimator. Assuming
that the estimator can resolve the maximum desired frequency, fmax' under the
condition N = fmax (Note that for a velo city series sampled at regular time intervals, double the mean particle rate would be required!), the bounds on np now
become (Eq. (7.93»
fmax
uA d
<n < 0.1
-
(7.97)
Vd
p -
again assuming particle trajectories perpendicular to the interference planes.
Eqs. (5.156) and (5.42) can be invoked instead ofEq. (7.93) for arbitrary trajectories.
Unlike Eq. (7.95), some further analysis is possible with Eq. (7.97). The lower
limit must always be less than the upper limit. This leads to the following condition for the maximum resolvable frequency
f max < 0.1 -Ad
uVd
or
f max < 0.075-u-
Fdrw
(for an ellipsoidal volume)
(7.98)
This inequality indicates that high er spectral resolution is possible by generating
a smaller measurement volume. Of course, the necessary mean particle concentration increases correspondingly, since bd , Cd and ad are generally coupled
with Fdrw •
Another general form ofEq. (7.98) for an ellipsoidal volume is
(7.99)
which is useful for designing the transmitting optical system, responsible for
generating the measurement volume.
In terms of flow properties, Eq. (7.97) can be re-arranged using Eqs. (7.85)
and (7.37) to yield a lower bound for Hp' while resolving the entire inertial
sub range of the turbulent motions (krh "" 1)
ReX
_
---.::;,np
27tLA d
0.1
'::;'-
(7.100)
Vd
An example using the above relations is instructive. Consider an airflow with
a mean velocity of 15 m S-1, a length scale of 1 m and the measurement volume
7.2 Components and Layout ofthe Transmitting Optics
363
dimensions used in the above example. The Reynolds number is 10 6
(v= 15 X 10-6 m 2 s'). Equation (7.100) reads quantitatively
70 mm -3 <
_ 6•7 mm -3
_n- p <
(7.101)
Obviously, if the mean particle concentration is chosen high enough to resolve the small scales of turbulence (high frequencies), the probability of multiple particle signals from the detection volume will become larger than the assumed 0.5 %. Either the detection volume must be reduced in size (a value of
rw = 5f.!m or Pd = 0.1 would be required) or the Reynolds number must be
achieved using larger models.
These relations must be applied locally in the flow and often the local convective velo city is significantly lower than the velo city scale used for the Reynolds number. This relaxes the lower bound on Tfp somewhat.
For the presented analysis, the detection volume dimensions or the factor Pd
have to be known. One or two detection volume dimensions can be defined by
using slit or pinholes in the receiving probe, as presented in seetion 14.2.1. Nevertheless, the third dimension must always be determined by experiments. This
can be done by using amplitude or burst-length statistics (sections 5.1.6.3 and
14.2.2.3) or by measurements in a flow with velo city gradients (sections 7.1.2.1
and 14.2.1.2).
7.2 Components and Layout of the Transmitting Optics
The transmitting optical system and the optical access to the flow field must be
designed with care, since errors introduced at this stage cannot be compensated
using subsequent system components. There is an extremely large number of
possible transmitting system configurations, although only a few variations are
offered commercially. To describe these possibilities and their layout, the following discussion has been divided into the major components of the transmitting system
•
•
•
•
Collimators
Bearn splitters and polarizers
Methods of achieving directional sensitivity
Generation of the measurement volume
Not all of these components and features exist in every system and sometimes
components are combined into single elements. Nevertheless, most systems can
be described according to this scherne.
7.2.1 Collimators
Collimators are used for beam-waist adjustment and/or for beam shaping. Beam
shaping is especially necessary when laser diodes are employed, since their beam
364
7 Laser Doppler Systems
profile may be elliptical or display astigmatism. An elliptic beam profile arises
when the divergence angle is different in two orthogonal planes. This can be corrected using a cylindricallens. Astigmatism refers to different beam waist positions (or virtual origins) for different planes through the beam, as illustrated already in Fig. 3.6. This leads to highly distorted measurement volumes and is
typically remedied using a pair of wedge prisms. Figure 7.8 illustrates a full
compensation and correction optics for a laser-diode light source.
The beam waist must be adjusted either to achieve a certain desired measurement volume size or, more frequently, to achieve a certain beam waist for an
optical fiber in-coupling lens. Collimators according to the Keppler (in Fig. 7.8,
12 > 0 ) or Dutch telescope (f2 < 0 ) principle can be used.
For beam-waist adjustment an adjustable collimator is used, meaning the
distance between the lenses can be varied (Fig. 7.9). Using Eqs. (3.96), (3.108) to
(3.110), the system matrix for the arrangement in Fig. 7.8 is given by
1 Z2J( 1
0J(1
A =( 0 1 -12-1 1 0
_
-
[
1-~
I
zoJ( 1
0J(1
1 11-1 1 0
h1 +h 2 _hI1h2
1
I
ZIJ
1
j
(7.102)
h1
I--
I
Pelt i er cooler
Laser diode
Collimator
Cylindricallens
Anamorphic prism pair
Fig. 7.8. Beam collimator used with a laser diode to correct for astigmatism and for an elliptical output beam profile
z,
1
1
--------- ----------- -
-~ --------------- -~--
Fig. 7.9. Collimator using the 'Keppler' telescope principle
7.2 Components and Layout of the Transmitting Optics
365
In this equation the system matrix is equated to that of a single, equivalent thick
lens.
Introducing the variable distance between the lenses Zo = 11 + 12 + LI, Eq.
(7.102) yields, after considerable manipulation, for the beam waist image position
(7.103)
and for the beam waist radius
(7.104)
To illustrate these relations an example collimator with 11 = 40 mm and
12 = 80 mm has been selected. The influence of a sm all misalignment of the collimator, LI (ZI =11 + 12 + LI), on the imaged beam waist is studied. The position
of the beam waist image is shown as a function of ZI and rw1 in Fig. 7.10. In Fig.
7.10 the radius of the beam waist image is presented for the same parameter
variation. These figures indicate that already a very small misalignment of the
collimator, LI, can lead to very large displacements of the beam waist. A small
positive displacement, LI, places the imaged waist at very large Z2 and can be
used to collimate a beam. Placing a further convex lens in the beam's path will
create a waist at its focal point. This lens combination can be particularly attractive for beam collimating because of its compactness.
A collimator according to the principles of a Dutch telescope can be integrated into the transmitting optics for adjusting beam expansion and the position of the beam waist. For LI = 0 and 12 < 0 Eq. (7.103) can be simplified to
(7.105)
and Eq. (7.104) becomes
(7.106)
The beam waist in 11 will be imaged in 12" If two parallel beams are displaced
symmetric about the optical axis, the distance between the beams after the collimator, Llb 2 , will vary as a function of the separation distance before the collimator, Llb 1 •
366
7 Laser Doppler Systems
'-"
+
'::5
,r
b
a
20
Zl = 100mm
Tw1
-
300 firn
_._. 400 firn
c
----0- 300
mm
_._- 400mm
d
- 5 0 0 firn
3
= 100 firn
zl=-100mm
------200mm
----0-
.
...
...'l!
Tw1
=-100flm
------200 firn
-500mm
.,8.,
........
.~
.,.,S
2
>Q
-20
o
20
-20
Displacement LI [mm]
o
20
Displacement LI [mm]
Fig. 7.lOa-d. Position and size of the beam waist after collimation (fl = 40 mm,
i2 =80 mm, Ab =488nm)
(7.107)
The discussion concerning spatial and temporal resolution in section 7.1
made it dear that the beam waist in the measurement volume must often be reduced in size to achieve the desired system performance. As described in section
3.2.2 (Eq. (3.129», this is most easily achieved by expanding the laser beams
before they enter the front focal lens. There are two common approaches to
achieving this.
The first is employed with fiber optic probes. The beam exits the single-mode
fiber with a divergence angle of approximately
lX b
Ab
na
"'-
(7.108)
7.2 Components and Layout of the Transmitting Optics
367
where a is the core radius of the fiber and Ab is the wavelength of the laser light.
The divergence of the beam can be used directly to achieve the desired beam expansion, by correctly choosing and positioning the collimating lens. The situation is pictured in Fig. 7.11. The lens is positioned at its focallength from the fiber and the focal length is chosen according to the desired radius of the
collimated beam, rw2 •
(7.109)
The second approach for beam expansion is to use a combination of a negative lens followed by a positive lens, as pictured on the right side in Fig. 7.12. A
front collimator for increasing the beam waist by a factor of 1:2 before the beam
splitting is used for the system illustrated in Fig. 7.12. All outgoing beams of the
transmitting optics passthrough the same lens, thus simplifying system alignment.
f
Fig. 7.11. Beam expansion, achieved when collimating after fiber transmission
z,
=150
260
l ,= -120 l. = 190
l s= 260
I
100
J
ll" V"
H
r.f-+--------t"- -- ---- -- -ci
" . , = 0.85
11", = 0.0473
"
d " , j-- 0078
•
= \.70
'Y-+-------i-----------J, = 161.2
J~ =
,I
1642
Fig. 7.12. One-velocity component transmitting optics with beam expansion and the
equivalent optical system. All distances are expressed in millimeters
368
7 Laser Doppler Systems
The equivalent system for the right lens combination shown in Fig. 7.12 can
be computed as follows. U sing the primary matrix
(7.110)
the beam matrix can be computed using
Z3
= f3 + f4
(7.111)
The equivalent system for the optical parameters shown in Fig. 7.12 becomes
• Focallength fe = 164.21 mm
• Position of the primary principal plane H 1e : hlc = 136.62 mm
• Position of the primary principal plane H 2c: h2e = 95.79 mm
The positions of the main focal planes are shown in Fig. 7.12. From these data
the dimensions of the measurement volume, the number of interference fringes
and the highest allowable concentration of seed parameters can be computed as
follows:
• The beam separation distance is increased by a factor 1:1.58 from
Llb l = 60 mm to Llb 2 = 94.8 mm
• The front collimator adjusts the waist by the ratio 1:2 and a further beam expansion is achieved in the transmitting optics of 1:1.58. The transmitting optics images the beam waist diameter dwl with the ratio (Eq. (3.129»
dw2 = 4AJ
d wl
(7.112)
Jrd: l
so that the final waist diameter using dwl = 850 11m (He-Ne laser,
Ab =632.8nm), becomes d w3 =2b o =2rw3 =781lm
• The intersection angle is e = 20.66 deg. The dimensions of the measurement
volume are thus ao = 39.6 11m, bo = 39 11m and Co = 217.5 11m, the fringe distance is Llx = 1.76 11m and the measurement volume contains N fr = 45
fringes.
• To insure single realization operation, i.e. only one particle in the detection
volume at a time,
4 b
3
Np = 0.1 = -Jrn
pao 0 cOFd
(7.113)
3
Thus the upper allowable particle concentration is
-
2
n < 1.19 x 10-
sine
3
=71mmFd rw
- 3-3
(Fd =1)
(7.114)
7.2 Components and Layout of the Transmitting Optics
369
if the detection volume size is equal the measurement volume size.
A wide selection of standard optical components is available from suppliers,
enabling systems to be easily designed or modified for specific applications using similar computations.
7.2.2 Beamsplitters and Polarizers
In a majority of laser Doppler systems, a single laser beam is split into two or
more beams, possibly also with color separation. The intensity distribution
among the beams will depend on whether a reference-beam or a dual-beam
system is required; however, most beam splitters are designed to yield aSO/50
intensity split.
By far the most common beam splitter in use is the Bragg cell, which simultaneously imposes a frequency shift on one beam. An example of how the Bragg
cell is used in an integrated transmitting optics will be discussed in section 7.2.3
(see also Fig. 7.15).
The angle between the zeroth and first-order beams exiting the Bragg cell is
given by (Eq. (3.155»
• ,.1,0
a=arCSIn-2A ac
(7.115)
where A ac is the acoustic wavelength in the Bragg cell and is dependent on the
acoustic velo city in the Bragg cell medium, Va' and the driving (shift) frequency,
fsh
A=~
ac
f sh
(7.116)
A rotating grating can also be used as a beam splitter, which is essentially a
mechanical counterpart to the moving acoustic diffraction grating generated in
a Bragg cello A laser beam impinging at an angle a (to the normal) on an amplitude line grating with spacing b will result in the characteristic diffraction
pattern with maxima positioned according to (Eq. (3.136»
. ßp -SIna=.
pA ,
Sin
b
P=±I, ±2, ...
(7.117)
For a line grating, the amplitude of the maxima of the diffraction order p follows a Bessel function (Born 1980, Bass 1995, Hecht 1989). Diffraction gratings
can also be designed to yield a high proportion oflight power in the ±lst order,
for example phase gratings with a sinusoidal change of phase at wavelength b.
The exact performance of the grating depends on the amplitude of the sinusoidal change of phase, as discussed in section 3.2.3.1. Furthermore, if the transmitting optics can be designed such that the intersection half-angle fulflls
~ = ß, then the interference fringe spacing in the measurement volume will be
independent of the wavelength.
370
7 Laser Doppler Systems
L1x=_A_=~
2sin o/z 2
(7.118)
Such a beam splitter is particularly advantageous when used with semiconductor lasers, since mode hopping or wavelength drift due to temperature fluctuations will then not affect the absolute measurement accuracy (Dopheide
1995). With rotating gratings, the diffracted beams are also shifted in frequency
byan amount fsh = ±pfgrid , where f grid is the frequency of the grating line passage through the laser beam.
Other examples of systems which exploit the achromatic behavior of the diffraction grating can be found in Schmidt et al. (1992), Czarske et al. (1994, 1997)
or Czarske (1999).
Conventional beam splitters can be used for laser Doppler systems, whereby
some designs have been made self-compensating, hence very in sensitive to misalignment. Some possible designs are pictured in Fig. 7.13. With gas lasers, the
coherence length of the laser beam is usually sufficient to make path-Iength
equalization within the beam splitter unnecessary. This is not necessarily true
for laser diodes. Some early designs also allowed continuous adjustment of the
separation LIs, hence, the intersection angle of the measurement volume and the
fringe spacing.
Most beam splitting techniques demand a certain input polarization direction
and polarizing elements may be required in the system prior to the beam splitting element to achieve this. Polarizers consist of material with anisotropie
properties, exhibiting different refractive indexes in two orthogonal directions
(Born 1980, Bass 1995). Transmission in one direction is characterized by the
refractive index no (ordinary wave) and in the orthogonal direction by n e (extraordinary wave). The phase difference between the wave components in each
of these directions amounts to
211:
,cjb'=(no -n e )dA
(7.119)
where dis the thickness of the polarizer. If the thickness is chosen such that the
ßS
Fig. 7.13. Beam splitting prisms
7.2 Components and Layout of the Transmitting Optics
371
phase difference is exactly 1t /2, then
A
(no -n e )d=4
(7.120)
Und er such circumstances, linearly polarized light entering the polarizer will
exit as elliptically (or circularly) polarized light The sense of the elliptic polarization will depend on the difference of refractive index in Eq. (7.120) Such a polarizer is known as a quarter-wave plate and transforms linearly polarized light
into circularly polarized light or vice versa.
If the plate thickness dis chosen such that the phase difference is 1t,
A
(no -n e )d=2
(7.121 )
r
-r,
then a wave entering the crystal at an angle
will exit at
i.e. a half-wave
plate will turn a linearly polarized wave through an angle of 2r. Thus, a A /2
waveplate allows the polarization direction to be arbitrarily rotated.
Quarter-waveplates are used in conventionallaser Doppler systems between
the laser source and the beam splitter. This allows the beam splitter and transmitting optics to be rotated, while insuring correct polarization of light on the
beam splitting surface without having to rotate the laser source. This is illustrated in Fig. 7.14. The rotation of the transmitting optics about the optical axis
is required when measuring different velocity components.
Beam splitter
~-~~~~~======~-------Circ~lar
Li;ear
Linear
polarization
polarizalion
polarization
Fig. 7.14. Use of A /4 plates to ensure correct polarization at the beam splitting surface
7.2.3 Methods for Achieving Directional Sensitivity
Conventional methods for introducing directional sensitivity into the laser Doppler system are based on the generation of a moving interference fringe pattern
in the measurement volume. This is achieved by imposing a frequency shift of
one beam over the other using a continuous, time dependent optical phase
variation of at least one of the laser beams. The most common devices used to
achieve this is the rotating diffraction grating (Oldengarm et al. 1976) or the
372
7 Laser Doppler Systems
acousto-optic modulator (Bragg ceH) (Durao and Whitelaw 1975), both described in detail in section 3.2.3.
In Fig. 7.15, two optical arrangements for a laser Doppler system using Bragg
ceHs are shown schematically. In the first example, the Bragg ceH also serves as a
beam splitter. The net frequency shift, f'h' is just the driving frequency of the
cell. In the second example, one Bragg ceH is placed in the path of each beam
and the net frequency shift is the difference of the two driving frequencies, fl
and f 2'
The optimal incident angle of the laser beam into the Bragg ceH depends on
the ceH specifications. This incident angle is realized using a wedge prism, as indicated in the diagram. In addition, the output angle of order m depends on the
ceH specifications and on the chosen shift frequency, as given in section 3.2.3.
.
mA
mAJ
2A ac n
2en
Slna = - -b = - - - '
m
(7.122)
where e is the acoustic velocity in the Bragg ceH, f is the driving frequency and
n is the refractive index of the ceH.
The detected signal then consists of the net shift frequency and the Doppler
frequency due to the flow velocity. The driving frequency is generated electronicallyand as such can be made extremely stable. The signal processor is generally
designed to accept a relatively high driving frequency, typically 40MHz ...
120MHz. For such driving frequencies, the deflection angle through the Bragg
ceH for the first-order beam is of the order 0.1 to 0.3 deg.
Alternatively, the signal can be electrically down-mixed into a lower frequency range for processing, provided the highest negative flow velocity stiH results in a positive frequency. The electronic down-mixing is typically an elec-
a
b
I,
J,
Photo-
10+ (/ ,- 1,)
Fig. 7.15a,b. Use ofBragg cells in a laser Doppler system to obtain directional sensitivity.
a Single Bragg ceIl system, b Double Bragg ceIl system
7.2 Components and Layout of the Transmitting Optics
373
tronic heterodyning, which can be illustrated using two sinusoidal signals of frequency w l and w 2 •
(7.123 )
Adding and squaring these two signals yields
s(t) = (51 (t) + 52 (t))2
= A 1A 2(sin 2 w lt+ sin 2 w 2t+ 2sinwl tsinw/)
= A 1A 2[sin 2
w l t+ sin 2 w 2t+ sin(w l + w 2)t] + A1A 2sin(w l
(7.124)
-
wJt
Applying a low-pass fIlter at a frequency below both wl and w2 removes all but
the last term in Eq. (7.124), yielding a signal at the difference frequency. For
down-mixing in laser Doppler systems, w l is the carrier frequency plus the
Doppler frequency and w 2 is the intended frequency of down-mixing. For instance, a Bragg ceIl operated at w l = 40MHz could be followed in the signal
processing by a down-mixer operated at w 2 = 35MHz, leaving a net frequency
shift on the signal of 5MHz. The down-mix frequency w 2 can be made variable,
according to requirements dictated by the flow velo city, while the carrier frequency is held constant. This has the advantage that the Bragg angle and the optical alignment through the transmitting optics remains unchanged, even for
different net frequency shifts.
In the second diagram of Fig. 7.15, a system employing a Bragg cell in each
transmitting beam is shown. In this case, the difference of the two driving frequencies yields directly the net frequency shift, without the need for downmixing. Thus, the necessary detection bandwidth at the photodetector can be
substantially lower, resulting ultimately in a beUer signal-to-noise ratio. The
disadvantage of this arrangement is that any change of the driving frequencies
also changes the exit angle of the beam from the Bragg cell, which must be compensated by using different wedge prisms for adjusting the entrance and exit angles into the Bragg cello
Other techniques for generating a moving fringe pattern in the measurement
volume have been demonstrated but are not common. Introducing a relative
phase modulation between the beams is one such technique. Such modulation
can be generated with a saw-tooth-like driving signal, in which case the frequency shift has periodic phase jumps. Alternatively, a single side-band modulation, not unlike that applied directly to the laser diode in so me laser Doppler
systems (Schroder 1987) can be used. Phase modulation can be achieved using
Pockels cells, fiber expanders (Jones et al. 1985) or integrated optical devices
(Pradel et al. 1993).
In principle, the moving fringe pattern can also be achieved by using lasers of
different wavelengths (frequencies) for each beam, as indicated in Fig. 7.16.
Generally, however, the frequency difference is very high (> 100MHz) and exhibits very large fluctuations, thus a constant shift frequency cannot be assumed. One solution is to detect the beat frequency (reference signal) between
the laser beams by superimposing a fractional part of each beam onto a photo-
374
7 Laser Doppler Systems
detector, as shown in Fig. 7.16. By evaluating the frequency of each the reference
signal and the detected signal, the magnitude and sign of the velocity can be determined.
Another method of achieving directional sensitivity is through quadrature
mixing. Quadrature mixing generates from one input signal a pair of signals
with equal amplitudes and a precise 90deg phase relationship. Two techniques
are available to do this, the homodyne technique, which is realized optically, and
the heterodyne technique, which involves electronic frequency shifting.
The homodyne technique is used less frequently, although recently some
novel optical systems involving semiconductor or solid-state lasers have revitalized this option. A second set of fringes must be generated in the measurement volume with exactly the same fringe spacing but with a 1t /2 phase shift.
The situation is visualized pictorially in Fig. 7.17.
Such fringe systems can be created using a single laser wavelength, but exploiting two polarization directions (Dändliker and Hen 1974, Drain 1980). Two
photodetectors must then be used with polarization filters for the separation of
channels. If two different wavelengths are used, the fringe spacing must be kept
constant. The use of a diffraction grating as a beam splitter insures that the
lransmill ing
lens
..:altcrcd lighl
callcring lighl
dClcclor
From laser 2
Rctcrcncc
dctcclor
Refcrcncc
signal
Dctcclcd
signal
I."
1."'I 10
Fig. 7.16. Generation of a referenee signal with a frequeney equal to the net shift frequeney
x
Fig. 7.17. Quadrature signal generation (homodyne method) using two fringe systems
shifted 1t /2 to one another (adapted from Müller et al. (1996))
7.2 Components and Layout ofthe Transmitting Optics
375
fringe spacing is independent of wavelength (Müller and Dopheide 1992,
Schmidt et al. 1992). In this case, color fIlters must be used with the two photodetectors. A further method is to alternate rapidly between the two fringe patterns with a synchronized multiplexing of the photodetector output, a technique
known as time-division multiplexing (Lockey and Tatam 1994). This technique
has also been used for two-velocity component systems (see section 7.4.2).
The fundamentals of the heterodyne technique of quadrature mixing can be
explained using the generic system pictured in Fig. 7.18. The unit accepts two
input signals, the measured signal and a reference signal. The reference signal is
typically the driver signal to the Bragg cells for frequency shifting (fsh) or the
beat signal generated from the laser beam pair, if an arrangement as in Fig. 7.16
is used. In any case, the reference beam is highly correlated with the measured
signal in the sense that any frequency (ffl) or phase fluctuation other than the
Doppler signal itself should be the same in each signal. The reference signal is
then passed through a broad-band, hybrid coupler, which yields two signals of
the same amplitude but with a relative phase shift of 90deg. Thus, the reference
signal pair after the hybrid coupler can be described hy
+ ffl,R)t+ <PR (t)]
(7.125)
SR2 = IR cos[ 21t{JSh + ffl,R)t + <PR (t)]
(7.126)
SRl
= IR sin[21t{Jsh
and the measured signal can be written as
(7.127)
Due to the high correlation between the measured signal and the reference
signals, the fluctuating parts of the signal are equal, ffl,M = ffl,R = ffl and the
phase variations are equal <PM (t) = <PR (t) = <P(t), These signals are then mixed,
amounting to an addition and a squaring of each signal pair, as illustrated with
Eqs. (7.123) and (7.124) This leads in each case to two self-products and to the
following two mixed products.
2s Rl sn
=~IMIR( cos21tfDt-[COS(21t{2fsh +2ffl + fD)t+2<P R(t))])
I\ lcasured signal
Rcfcrcncc signa l
Fig. 7.18. Block diagram ofheterodyne quadrature mixing
(7.128)
376
7 Laser Doppler Systems
(7.129)
The self-produets and the seeond term of eaeh of the mixed produets are removed by low-pass filtering. This leaves the quadrature signal pair
(7.130)
(7.131)
in whieh neither the shift frequeney f'h nor the frequeney of phase fluetuations
appear. The situation is pietured in Fig. 7.19, in whieh it is clear that quadrature
mixing ean also be used to determine particle direetion in the measurement volurne, depending on whether the eosine signal leads or lags the sinusoidal signal.
Quadrature demodulation teehniques render possible many novel optieal arrangements, especially in whieh separate laser sourees for eaeh beam are used,
e.g. two stabilized Nd:YAG ring lasers or diode lasers. Examples of one or multiple velocity eomponent systems ean be found in Kramer and Dopheide (1993),
Müller et al. (1993), Müller et al. (1994), Kramer et al. (1994), Czarske and Müller
(1995), Müller et al. (1996a), Müller and Dopheide (1997) or Czarske (2001a).
A further teehnique for introducing direetional sensitivity, whieh is partieulady well suited to fiber-based laser Doppler systems, exploits stimulated Brillouin seattering in the fibers. This is a non-linear oseillation effeet in the erystal
strueture of the glass fibers in whieh a baekseattered eoherent Stokes wave is
generated at a frequeney several GHz below the stimulated wave. Further details
ean be found in Többen et al. (1994).
A last method of resolving the velocity sign to be diseussed is to segment the
measurement volume at the imaging plane in the reeeiving opties and then to
Negative partide velocity
Positive partide velocity
Time
Ti me
cos(2 n (- 10)1)
\. si n(2n( - J"o)t)
~--~--~--~-----+
TIme
... li mc
---"" < in(2n I D I)
'............ _......
Fig. 7.19. Directional discrimination bya quadrature signal pair
7.2 Components and Layout of the Transmitting Optics
377
employ two photodetectors. Plamann et al. (1998) have realized this using a
twinned optical fiber as sketched in Fig. 7.20. The sequence of the signals in time
indicates the flow direction. The sum of the two signals can also be used for a
more accurate velocity determination. Further segmenting for a two-velocity
component system is conceivable.
Measurcmcnt
t
Scallcrcd light
rol·\i~
";
F~
Signal I ~ 2
Time
'Iimc
Fig. 7.20. Directional sensitivity using a twinned optical fiber in the image plane of the receiving optics
7.2.4 Generation ofthe Measurement Volume
In this section, the requirements for achieving uniform fringe spacing within the
measurement volume are discussed. The issue is best illustrated by Fig. 7.21,
which employs Moire fringes (section 5.4) to illustrate two laser beams, which
do not cross at their respective waist positions. In all cases, the fringe spacing is
non-uniform and will lead to biased estimates of both the mean velo city and
higher moments. Such a situation arises if the transmitting system is improperly
designed or due to astigmatism, arising from unequal beam refraction in different planes. Indeed, this source of error is usually the limiting factor in deter-
a
Longitudinal distortion
b
Transverse distortion
Fig. 7.21a,b. Fringe distortion in the measurement volume when the laser beams do not
intersect at their waists. a Longitudinal distortion, b Transverse distortion
378
7 Laser Doppler Systems
mining the accuracy with which flow velocities can be measured using the laser
Doppler technique.
The origin of the non-uniformity is the curvature of the wavefronts away
from the waist of a focused Gaussian beam. Hanson (1973,1976) gave approximate expressions for the variation of fringe spacing along the length (longitudinal) and across the width (transverse) of the measurement volume. Durst and
Stevensen (1979) extended the longitudinal analysis for large deviations of the
waist from the intersection point. A rather rigorous analysis, valid also for nonGaussian beams, for example from laser diodes, was presented by Durst et al.
(1990), however this analysis requires a numerical solution. More manageable
expressions have been presented by Miles and Witze (1996) and Miles(1996) and
have been shown to be equivalent to the more rigorous derivations for most
practical situations. Miles and Witze (1994) have also presented a means to visualize the fringe non-uniformity in the laboratory.
The analysis of Miles (1996) begins with the description of a Gaussian laser
beam as discussed in section 3.1.4.2, in particular using the Rayleigh length lRb
(Eq. (3.61), the wavefront curvature Rb (Eq. (3.65», and the local beam radius
rmb (Eq. (3.64». The situation to be examined is pictured in Fig. 7.22, showing
two Gaussian beams intersecting with the angle e with the coordinates given in
Eq. (5.7).
from Eq. (5.52) can be approximated by
The local spacing between fringes
neglecting the terms in Eqs. (5.53) and (5.54) and is given by
ox
"" ~ --,,>-[
2sm ~
X 1Z 1
1-
X 2Z 2
z; + I;, z; + I;,
( x Z
)
2tan~ +
e z;X,2,
+l~2
ZI +
2
2
1 1
1
(7.132)
Rl
z
Fig. 7.22. Geometryand coordinates for deriving fringe spacing
7.2 Components and Layout ofthe Transmitting Optics
379
For the special case of a path-compensated laser Doppler transmitting optics
with equal beam waists (rwl =rw2 =rw' ZRl =ZR2 =ZR)' each located at equal distances from the beam intersection Ztl = Z'2 = Z" Eq. (7.132) cannot be simplified
as in Miles (1996). For this case of equal waist displacements the interference
fringe distance varies mainly in the z direction and is nearly constant in the
x direction, as pictured in Fig. 7.21a. For an ideally aligned path-compensated
system, the transverse variation of fringe spacing is negligible. Therefore Eq.
(7.132) can be approximated by the general expression for the fringe spacing
along the z axis (x = 0) given by Miles (1996)
.-:.( x = 0, z ) =- Ab
(z, +zcos'%)zcos'%)
- -[ 1 + -'---;-------'---,--..,,--
VA
(7.133)
z,(z, +zcos,%)+Z;
2sin,%
Note that the definition of the beam waist dislocation z" Eq. (5.7), differs
from Miles (1996) along the beam axis, and the numbers of the beams (b = 1,2)
have been exchanged, therefore also Eq. (7.133) appears different. For the intersection point of the two beams (x = z = 0) the relative fringe spacing change in
the z direction is given by
~ d&:
&: dz
__I_dfD
fD dz
cos,%
(7.134)
Rb
which is the longitudinal fringe variation as derived by Hanson (1973).
Transverse variations of fringe spacing occur when the two beams have different longitudinal positions. The situation in Fig. 7.21b corresponds to equal
but opposite distances of the beam waists from the beam intersection
(z, = ztl = -Z'2). This occurs for a perfectly aligned system in which the path
lengths of the beams are different. The fringe distance varies mainly in the
transverse or x direction so that for z = 0
J
.-:.( X,Z ) - - .Ab- -[ 1- ----;,2--;2,------XCOS'%
- 0
VA
2sm,%
2
z +Z
(7.135)
~tan'%+xcos'%
Eq. (7.135) can be expressed with the local wavefront curvatures resulting in
~
vx(x z=O)=
,
Ab
Ab
Rb
2e/2/
2 R b sine/+xcos
/2
Rb
2 Rb sin,% +x
which includes the results from Hanson (1976). By using Rl
(7.136)
dJx _
dx -
(~_ X-X Rl )
Ab
2(X-X Rl
)
X-X Rl
= X Rl sin,%
(7.136)
in Eq.
(7.137)
Rb
which expresses the transverse fringe variation at z = 0, as also derived by Durst
and Stevensen (1979).
380
7 Laser Doppler Systems
Miles (1996) has given an approximation ofEq. (7.133) in terms of system parameters. For equal distances of the beam waist ( ztl = Z'2 = z, ) in a pathcompensated system the longitudinal dependence x = 0 is
&(x =O,z) =+[I-Z 2rwo L1z b cos 2
2sm o/z
L1b
+
'%
z' co,' ~x('';;'" )'(1- Z 2; .12, 00"
n
(7.138)
%
where rwo is the beam waist and L1b is the beam separation in front of the focussing lens, as shown in Fig. 7.23. L1z b is the normalized misalignment,
L1z b = (z wb - j) / ZR' also shown in Fig. 7.23 and z is the Z coordinate normalized
with half the measurement volume length
o/z
Z
sin
Z=-=Z----'--"---Co
rm(x=O,z=O)
(7.139)
Equation (7.139) is valid for rwo / L1b ::; 0.1 and lL1z b l::; 2 or for arbitrary rwo / L1b
when the system is perfectly aligned (L1z b '" 0), in which case Eq. (7.138) becomes
&(x = O,z)
+[1 Z2
=2sm o/z
+
cos 4
'% ( 2rL1bwo J2]
(7.140)
The ratio 2rwo I L1b is seen to be instrumental in determining fringe nonuniformity. Indeed, for this ratio to be significant, the separation L1b would typically be small, implying small intersection angles. Thus for modest values of
2rwo I L1b and L1z b
~[1- Z2rwo L1z + Z2( 2rwoJ2 l
2 sin o/z
L1b
L1b J
&(x = O, z ) =
(7.141)
b
or for ideal alignment conditions
J
Bcam I
Z~I
Fig. 7.23. Dual-beam laser Doppler transmitting optics
f
x
7.2 Components and Layout of the Transmitting Optics
(rL1bWo )2]
&(x =O,Z)=:+[I+Z 2
2sm~
381
(7.142)
This equation represents the minimum possible variation in fringe spacing
(o/z -70, L1z b = 0) for a given intersection angle e and waist diameter rwo prior
to the transmitting lens.
Miles (1996) gives a similar expression for the transverse dependency
(ztl = Z, = -Z(2) of the fringe spacing, Eq. (7.135), which, in terms of system parameters, becomes
(7.143)
where xis normalized with rm / coso/z = ao'
The relative deviation of the fringe spacing, given always in the last term in
Eqs. (7.133), (7.135), (7.138) and (7.140) - (7.143), increases linearly with the corresponding coordinate. If the detection volume can be decreased in the respective co ordinate, i.e. by using slits or pinholes in the receiving optics, the velo city
fluctuations resulting from different particle trajectories can be suppressed. For
a path-compensated system, the standard deviation in the velo city can be significantly reduced by using side-scattering. Nevertheless, for a correct absolute
velocity measurement the system has to be aligned perfectly (ztl = Z'2 = 0). The
analysis of Miles (1996) and its experimental verification in Miles and Witze
(1994) give a very general framework for evaluating fringe non-uniformity in laser Doppler systems. The resulting over-estimation of measured velo city moments due to this non-uniformity is addressed, at least for the second moment,
in Zhang and Eiseie (1998). Generally, this effect is only significant at very low
turbulence intensities. Introducing a fringe distortion number as
1 dJx
r- c -Jx dz
-
(7.144)
0
where Co is the half-Iength of the measurement volume, Eq. (5.40), Zhang and
Eiseie (1998) have approximated the relative normalized error in the estimated
standard deviation C5u of velocity fluctuations for the full length of the measurement volume to be
2
1
(l+r )+-r
3
2
li 2
--1
O'~
(7.145)
which for laminar flow reduces to
Tu= ~ =H r
2
(7.146)
The apparent turbulence intensity due to fringe non-uniformity is linearly proportional to the fringe spacing gradient in the measurement volume. This analy-
382
7 Laser Doppler Systems
sis was carried out for the simple case considered in deriving Eq. (7.137) and
must be modified accordingly if more complicated distortions are present.
A misalignment of the beam waists away from the intersection origin can be
the result of poor system layout, e.g. improper choice of coHimator, or because
of distorting components in the path of the laser beams. The laUer is more
common in practice and can easily occur if the laser beams must translate
through glass or into a liquid flow at an oblique angle. This situation has been
studied in aseries of articles by Zhang and Eiseie (1995, 1996, 1998) and is weH
summarized in Fig. 7.24, adapted from their work.
As seen in this figure, an oblique entrance into a medium of different refractive index can result in several distorting effects:
• Two-velocity component measurements may become impossible because the
two measurement volumes may no longer be coincident
• The data rate of a single component system may be significantly reduced,
since the effective aperture of the receiving lens is significantly reduced.
• The waist will be translated along the beam axis, resulting in beam distortion
and astigmatism.
z
x
z
Fig. 7.24. Origins of astigmatism when using a one or two-velocity component laser Doppler system in liquid flows
Such difficulties are avoided if the optical axis of the system enters the medium perpendicularly. Where this is not possible, the use of a liquid-filled prism,
as shown in Fig. 7.25 can be used as compensation (Booij and Tukker 1994).
A general procedure for computing the position and shape of the measurement volumes of a three component system entering the test section through an
arbitrarily shaped window has been presented by Doukelis et al. (1996).
7.3 Layout of the Receiving Optics
383
Fig. 7.25. Use of a liquid filled prism to compensate for astigmatism (adapted from Booij
and Tukker 1994)
7.3 Layout of the Receiving Optics
The detector should ideally receive only light originating from the spatial extent
of the measurement volume. Additional contributions from scattering centers in
the beams outside of the volume or reflections from walls or optical components
lead to an increase in signal noise and to a decrease of signal quality. Therefore,
the receiving optics has the task of imaging as closely as possible only the measurement volume over the length 2c o in the z direction.
A typical forward or back-scattering receiving system is pictured in Fig. 7.26a.
In actual systems, a two-Iens configuration is normally used, primarily to reduce
aberrations and to allow arrangements that are more compact. The front lens of
focal length f1 can be normally changed by the user to work with different
stand-off distances between the measurement volume and the receiver probe.
The system consists of two spatial fIlters, an aperture of diameter dr in front of
the system and a pinhole of diameter dp;n near the image plane behind the lens.
The detector is the sensitive surface behind the pinhole. The optical system in
Fig. 7.26b represents the thin lens equivalent system with the focallength fand
the equivalent aperture diameter da' as outlined in section 3.2.1.
The magnification of the system is deterrnined by the ratio of the two lenses
in Fig. 7.26a
_ -Z2
_
f _ Z2 - f
- -f2- ß---------f1
ZI
ZI -
f
f
(7.147)
Therefore the observation field in the x direction, L1x, is the pinhole diameter
divided by the magnification factor
384
a
7 Laser Doppler Systems
X·
I,
j~
dClc.:l0r
b
ol,
Fig. 7.26a,b. Configuration of the receiving optics. a Optical configuration of a simple two
lens receiving system, b Equivalent single lens system
(7.148)
which depends on the pinhole size, the focallengths and the working distance.
Partieles in the focal plane of the system (z p = 0) are imaged as points in the
plane of the pinhole. If the partiele is in the observation field of the focal plane
(z=O, IXpl<Llx/2), all scattered light collected by the aperture can pass the
pinhole. Outside the observation field, the scattered light is blocked. Jf the partiele is in front or back of the focal plane, the image is defocused and becomes the
shape of the aperture, i.e. an cirele. For the positions zp = Llz_,Llz+, x p = 0 in
Fig. 7.26, the defocused cireles have the same size as the pinhole and all the
scattered light of the partiele is still detected. The depth -of-field of the receiving
optics can therefore be computed as
and depends on the inverse of the aperture diameter. For partieles inside the
shaded region (A) in Fig. 7.26, which is defined by the observation field and the
depth-of-field, all scattered light reaches the detector. The scattered light from
partieles in the region (B) in Fig. 7.26 is only partially detected because apart of
the defocused image is blocked by the pinhole. Light from region (C) cannot
enter the detector.
7.3 Layout of the Receiving Optics
385
For laser Doppler and phase Doppler receiving systems only the region which
is illuminated by the laser beams is interesting. The region Llz A = Llz A+ + Llz A- in
which scattered light can be completely detected is computed as (Nakatani et al.
1977)
Llz A + =
LIx+2c d tan%
d +Ax '
Llz A _
2tan%+~a--
=
LIx + 2c d tan %
d -LIx
2 tan 'Ji + --".a_ _
(7.150)
2)
Using LIx« da this expression becomes
Llz A
=
LIx + 2c d tan'Ji
d
tan%+_a
=
LIx + 2a d
d
tan%+-"
22)
(7.151)
22)
where a d and Cd are the semi-axis dimensions of the detection volume in the x
and the 2 directions respectively, Eq. (5.42). The light scattered from particles
with larger distances from the measurement volume is detected only partially
and can reduce the detected number concentration. No signal can be received
from particles with positions 2 p > 2 B+ or Z p < Z B-. These limits can be computed as
Llz B+ =
LIx+2c d tan%
d _ LIx '
2 tan % _ a _ _
----'"c
Llz
=
B-
LIx + 2c d tan %
d +LIx
2tan%-----"a--
2)
(7.152)
2)
and using again LIx« da the region has the overall dimension
Llz B =
Ax+2c d tan%
Ax+2a d
d
=
d
tan%-_a
tan'Ji-_a
2z)
(7.153)
2z)
Equations (7.151) and (7.153) can be used to determine the maximum region
from which signals, with or without modulation, can be expected. The volume of
this region can be used when computing concentration limits to maintain single
particle realization. On the other hand, only signals in the ellipsoidal detection
volume, Eqs. (5.42) and (5.43), will be detected. Especially for signal processing
techniques working with the burst shape, the burst amplitude or the transit
time, any disturbance of the signal shape may influence the final results. ExampIes of such techniques include the interpolation of the peak frequency, section
6.3.1, the cross-sectional area difference method, section 9.1.1, or the weighting
techniques for unbiased flow parameter estimations, section 11.1.
The depth-of-field is determined by the aperture size in Eq. (7.149). When the
aperture size is smaller than
(7.154)
386
7 Laser Doppler Systems
the scattered light from small particles in the ellipsoidal detection volume with
semi-axis ad, bd and Cd is detected without loss of information. The observation
field LIx should therefore always be J2 times larger than the expected detection
volume diameter 2a d •
If now also the diffraction at the aperture da is considered
ZI
ZI A
LIx = dp;n - + 2.44--
(7.155)
da
Z2
and the magnification ß = -Z2 I ZI' the position ZI = (1-11 ß)f and the numerical aperture NA = da I (2n are used, a final expression is obtained as
LIz
=_
A.B
1
ß
dp;n
±1.22~(ß-l)-2adß
_ _ _---""N"-'A'---_:::--__
(7.156)
ß
tan~±NA ­
ß-l
The dependence of the depth-of-field on numerical aperture is illustrated in
Fig. 7.27 for different pinhole diameters with and without diffraction. Diffraction limits the region of complete scattering light detection for sm all apertures
in comparison to the ideal case from Eq. (7.151). By using Eq. (7.155) in Eq.
E 6 ,-.--.--,-.--.--,-,--..-,-,
Wilhoul
diffrac.:lion:
E
" 1
.~
"
2
.dz : ------A
Llz.: - - - -
di""- IO~l
O ~~~
_
di",- 30 l-lm
---
__
L-~~
_ _L-~~_ _~
6 .--.---,---.-.--,---,,-,...-.---,---,...---,
E
E
O ........................---L_.L--'---'--..I.......................-..I
QO
QS
1.0 QO
Numcrical apcrlurc NA [-J
0.5
1.0
Numerical aperlurc NA [-I
Fig. 7.27. Depth-of-field as a function of numerical aperture for different pinhole diameters. All scattered light on the aperture surface is detected for particles with z positions in
regions (A). Scattered light from particles in the regions (B) is partially detected.
(a d = 76.2 I-lm, e=20deg, Ab =632.8nm, ß=-O.2)
7.3 Layout of the Receiving Optics
387
(7.154) the lower and upper limits of the numerical aperture for an ellipsoidal
detection volume can be defined. The lower limit is given by the diffraction of
the aperture which is larger than the pinhole diameter. The upper limit is reduced in comparison to Eq. (7.154), because the diffraction limits the region of
complete scattered light detection.
If the detection volume dimensions are chosen to be the same as the measurement volume dimensions, ad = ao ' Cd = Co' and the pinhole aperture diameter
to be twice as large as the measurement volume image diameter, dpin = -4aoß,
Eq. (7.156) yields
_ 1
L1z AB
'
-
ß
±1.22~(I-ß)+6~ß
NA
cos,%
ß
(7.157)
tane/±NA-/2
ß-l
as a basic relation for designing receiving optics.
Furthermore the modulation depth and therefore the SNR is influenced by the
aperture size and shape as described in section 5.1.4, especially for strong intensity variations over the aperture. For such cases rectangular aperture shapes are
advantageous, influencing the depth-of-field for different cross sections.
The actual implementation of the receiving optics shown generically in Fig.
7.26 may vary, both with respect to the optical components employed and to the
angle at which the scattered light is collected. Often a fiber-optic link is required
between the pinhole and the photodetector in order to be able to place the receiving probe remote from the larger and bulkier photodetectors. Especially for
two-velocity component systems or phase Doppler systems, in which up to four
photodetectors are used, this can be advantageous. However, also for systems
operating in backscatter, the transmitting and receiving systems can both use fiber-optic links to allow flexibility in positioning and handling of the measurementprobe.
Unlike the fibers used in the transmission system, the receiving fibers need
not maintain spatial coherence or polarization and therefore, a large diameter,
multi-mode fiber is sufficient. Typically, a graded-index or step index fiber of
200/-lm core diameter is employed, which also gready reduces the required positioning accuracy of the fiber input. With proper dimensioning, the fiber input
cross-section may also act simultaneously as the pinhole; however, this sometimes leads to distances, Z2' which are no longer tolerable for compact measurement probes. In this case, pinhole foils can be affixed direcdy to the input
face of the fiber. For instance, slit type pinholes are regularly used in phase
Doppler systems, as discussed in section 8.2.
The scattering angle at which the receiving optics is placed is determined by
three considerations:
• Scattered light intensity
• Optical access to the measurement position
• Tolerable dimensions of the measurement volume
388
7 Laser Doppler Systems
The maximum scattered intensity is at a scattering angle of
<Pr '" Odeg, forward scatter, due to high contributions from reflection and diffraction. Light scattering examples given in chapter 4 (e.g. Figs. 4.29 to 4.32) indicate that the scattered light intensity in forward scatter can easily be a factor
500 .. .1 000 larger than in side scatter (<p r '" 90 deg) or backscatter
(<Pr'" 180 deg). Nevertheless, the available optical access to the measurement
position may not permit collection in forward scatter, for example with internal
combustion engines, where only one optical access to the combustion chamber
is available. Especially in large installations (e.g. wind tunnels), it may not be
feasible to synchronously traverse aseparate transmitting and receiving optics
on opposite sides of the tunnel and with the required precision. In such cases the
backscatter arrangement is particularly attractive, since then the transmitting
and receiving optics can be integrated into a single housing and can use a common focussing lens. Such a fiber-optic based measurement head is shown in Fig.
7.28 in cross-section.
Another reason to depart from a forward scatter or backscatter collection angle is to reduce the length of the detection volume. Especially when measuring in
flows exhibiting high velo city gradients in the z direction, the length of the detection volume, which is typically 5.. .10 times larger than the diameter, may not
afford the necessary spatial resolution (section 7.1.2). Positioning the receiving
optics in side scatter (i.e. <Pr = 90 deg) effectively limits the detection volume to
a length given by the projected pinhole diameter
(7.158)
while accepting that the scattered light intensity may be drastically lower than
forward scatter and often significantly lower than in backscatter. Normally such
measures can be avoided by orientating the system such that the largest flow
gradients are aligned in the x or y directions of the measurement volume. In
complex, three-dimensional flows or with the phase Doppler technique this may
not always be possible. Such side-scatter systems have been discussed in section
7.1.2.1.
Righl-angle
/llea uremcnl
volume
Flow
Tube lor laser
Backsa! Ile rcd
lighl \
Excha ngeablc
lrom lcns
Thin righl -a ngle
prism (movdblc)
fiber collima lor
/IIonomodc fibers
Fig. 7.28. Cross-section of a fiber-optic based laser Doppler measurement probe operating in backscatter (adapted fra m DANTEC Dynamics)
7.4 System Description
389
7.4 System Description
7.4.1 One-Velocity Component Systems
The basic layout of a one-velocity component laser Doppler system has already
been covered in the previous sections. Examples of conventional optics have
been given in Figs. 7.14 and 7.15. Integration of the transmitting and receiving
optics into a single, fiber-optic probe has been illustrated in Fig. 7.28. The correet choice of measurement volume size, how to achieve this size and a suitable
particle concentration to obtain the desired temporal resolution were discussed
in sections 7.1 and 7.2. It is nevertheless instructive to review so me ofthe simple
trade-offs when selecting an optical system, many ofwhich can be applied without change to two and three-velocity component systems.
Most commercial optical systems offer interchangeable front lenses of various
focallengths. This is possible because the outgoing beams have been highly collimated before the front lens, meaning ZI in Eq. (3.127) has been made very large
and thus Z2 = f , for alliens choices. This insures that the beam waist remains at
the interseetion volume. However, a change of focallength changes both the size
of the illuminated volume and the intensity. The diameter of the volume will
change approximately linearly with the focallength of the transmitting lens (ft)
and the intensity will therefore change with r;b I f/ , where r wb is the beam radius at the waist before the front lens.
Changing the focallength of the receiving lens (fr) will also change the solid
angle of the receiving aperture, with the proportionality d~ I f,2, where da is the
diameter of the receiving aperture. Thus an optical 'figure-of-merit' for a laser
Doppler system, characterizing the amplitude of received signals could be
K
=(d J2
a r wb
(7.159)
fJr
or for a backscatter probe, in which ft
= fr = f
(7.160)
This illustrates clearly that, to a first approximation, a doubling of the focal
length will lead to a fourfold decrease in signal amplitude and a corresponding
decrease in signal-to-noise ratio. The situation can be improved either optically,
by employing a beam expander (increase rwb )' by using a larger receiving aperture (increase da) or by using a higher incident laser power. Of course other
means of increasing signal amplitude are also available (larger seed particles,
higher quantum efficiency at the detector etc.); however, these parameters are
often fixed in a given experimental system.
In many applications, a one-velocity component system is sufficient. Nonetheless, most single component systems are designed to be rotated about the
optical axis. This allows consecutive measurement of different velo city compo-
390
7 Laser Doppler Systems
nents at the same position in the flow field. If the flow is stationary, such a procedure can save the investment in optics and signal processing for a second velocity component. Furthermore, it is possible to obtain the Reynolds shear stress
with a one-velocity component system if the rotation angles are correctly chosen.
To illustrate this, the co ordinate system shown in Fig. 7.29 is considered. A
measurement performed with the optical system rotated at the angles a\ and a 2
about the x axis will yield respectively
u\ = ucosa +vsina
j
j
=(u+u')cosa +(v+v')sina
j
(7.161)
j
u2 = (u + u')cosa2 +(v + v')sina 2
By choosing a j = -a 2 = a for two consecutive measurements, and performing a third measurement U o with a o = 0 deg, the following flow statistics can be
readily computed from the measured mean and fluctuating quantities
(7.162)
(7.163)
-
U j -U
v=---2
(7.164)
2sina
(7.165)
u'v' = u
/2
j
12
-
u2
(7.166)
4cosasina
Eq. (7.166) yields one component of the Reynolds shear stress under the assumption of stationary flow and requires only two consecutive measurements at
Measurement 0
y
Measurement 1
Measurement 2
y
Fig. 7.29. Rotation angles of a one-velocity component laser Doppler system
y
7.4 System Description
391
a single point. Note that the time series of u'v' is not available. Für this a twovelocity component system is necessary.
The statistical errors involved in these quantities are now examined using
concepts to be introduced in section 10.4. Applying Eq. (10.67) for the propagation of stochastic errors to the measurement of V,2 and u'v' yields (Tropea
1983)
;:- , - ; 2
(
vU
v
)
;:~
= vU
(
1
) 8cos 2 asin 2 a
+(
-,-;
U
v
cos2a ;: )
va
cosasina
2
(7.167)
(7.168)
where b designates the respective uncertainty interval, evaluated at the same
confidence level for all quantities, e.g. 95 %. These equations have been derived
assuming that bU[2 '" ÖU~2 '" öuü2 , which means the measurement uncertainty is
about equal for each of the consecutive measurements. The last term in each of
these equations is small because the uncertainty in the angle adjustment is generally smalL Thus, the stochastic error will scale with the factors shown in Fig.
7.30.
From this figure it is seen that the ideal measurement angles for the quantity
u'v' are a = ±45 deg, whereas for V,2 the angles a = ±90 deg are preferred. If
both quantities are to be measured, then angles closer to a = ±60 deg may be desirable. Angles less than a = ±30 deg should be avoided, otherwise the uncertainty (scatter) of the turbulence quantities will become unacceptably large.
~6
\
\
(ou'v')' ~ ./----;,-------,,-Beos' asin' a
\
\
\
\
\
\
\
\
\
----- (ov")' ~
,
\
-._1_,-(1+2COS' a)
2sm a
\
\
\
\
\
\
2
,,
,,
,,
" "
'"
",
- ... _--- ... _--O~~
o
__
J-~~-L
__
~~
__- L_ _
L-~
__
45
~~~-L
__
L-~
__
~~~-L~
Tilt angle
Fig. 7.30. Factors influencing the uncertaintyintervals for u'v' and
V,2
IX
[deg]
90
392
7 Laser Doppler Systems
7.4.2 Two-Velocity Component Systems
Extending a one-velocity component laser Doppler system to two velo city components requires a second measurement volume with a different orientation
about the z axis, usually 90 deg with respect to the first measurement volume.
However, it must also be possible for the photodetector to distinguish wh ether
the detected scattered light originated from the first or second measurement
volume and this is usually achieved by using different colors. The most common
two-velocity component system is therefore a two-color, four-beam arrangement, shown generically as a fiber-optic, backscatter system in Fig. 7.31.
A variation of this approach combines one beam of each transmitting pair
into a mixed color beam, resulting in a two-color, three-beam optical arrangement, as pictured in Fig. 7.32. This system allows the measurement volume to be
positioned very dose to a wall without having to tilt the transmitting probe.
By far the most common laser source used for two colors is the Argon-Ion gas
laser, providing strong lines in the blue (,1 = 514.5 nm) and green (,1 = 488 nm)
wavelengths.
When two detection volumes are involved in a single system, their alignment,
both on the transmitting side and on the receiving side is very important. Poor
alignment leads to low data rates, since the coincidence rate drops. In very
poody aligned systems, the two channels may even see signals from different
partides at the same time, which falsifies correlation values strongly, since then
also a spatial correlation is involved. Alignment procedures vary, depending on
the optical configuration.
For conventional optical systems without fibers and with integrated beam
laser bcam
co,or~~~~~J~~~~III~ii
Ineidenl IWO
Ab =488nm,5145
manipulalors
·Ihnsmiller/rceciver probe
----------
U
rlow
Fig. 7.31. Two-color, four-beam laser Doppler system, suitable for measuring two velocity
components. The green (A = 488 nm) and bIue (A =514.5 nm) lines of an Argon-Ion laser
have been used
7.4 System Description
393
Green
Fronl vicw;
Bluc and rcen
~ inlcrfcren 'e fringes
~o
nenl
ß1ue
Fig. 7.32. Two-color, three-beam transmitting probe for measuring two velocity components
splitters, alignment of the two illuminated volumes is insured if the beams are
parallel before the common front lens and if the front lens has very low chromatic aberrations. Here the main concern is to insure that the waist of each
beam is also at the intersection volume. This is most easily achieved by working
with highly collimated beams before the front lens, i.e. Zl ~ 00 and Z2 ~ f in
Eq. (3.127).
Fiber-optic probes may require adjustment of the individual beams. For this
purpose, a pinhole is placed at the focallength of the probe and each beam is
aligned to focus onto the pinhole in turn. Good alignment is recognized when
the diffraction rings behind the pinhole are concentric and centered on the pinhole. Another possibility is to image the measurement volume by a micro-Iens
with a very small focallength. By moving the lens back and forth, the intersection region can be imaged onto a screen. If the image of the measurement volurne is not large enough and no space is left, a mirror can be used to project the
image in a different direction. The overlap of the beams in the intersection region can be checked by switching on and off one of the laser beams one at a
time. In a similar manner the interference fringes can be visualized to check the
modulation in the measurement volume (if no shift frequency is used.) Note that
the imaging of the measurement volume by a micro-Iens is similar to the scattering of the laser beams by a very large particle.
If the system operates in backscatter, the receiving optics must also be aligned
with the illuminated volume. Generally, this is achieved by first coupling laser
light into the receiving fiber and then positioning the alignment pinhole at the
waist of the beam emanating from the receiving fiber. The procedure above with
the transmitting beams then follows.
Rough alignment of the receiving optics for off-axis or forward scatter is best
achieved by positioning a scattering center in the illuminated volume, typically a
hot-wire, a glass bead or even a piece of paper. The center of the measurement
volume is achieved when the scattering center produces the same diffraction
rings for all incident beams. Because a relatively large particle or cylinder causes
a detection volume shift (see section 5.1.3) a further adjustment must be made
afterwards. This fine adjustment of the receiving aperture is usually possible by
394
7 Laser Doppler Systems
examining the amplitude and especially the modulation of the signals from
small particles (d p < 0.05 dw ) on an oscilloscope. Further information about the
alignment can be found in section 14.1.3.
The component recognition at the photodetector does not necessarily have to
be achieved by using different colors. By imposing different frequency shifts on
the two measurement volumes, a single color can be used for all transmitting
beams and detection can follow with a single photodetector. The received signal
must then be fed parallel into two band pass filters, adjusted so that they isolate
the respective velo city components. The difference in shift frequencies between
the two volumes and the bandwidth of the ftlters must be chosen to avoid any
truncation of velocity fluctuations in a turbulent flow.
A different concept of achieving the necessary frequency differences between
components is to use three appropriate monomode laser diodes. Such a system
has been realized with DBR (distributed Bragg reflector) laser diodes with almost equal emission frequencies and overlapping tuning ranges without mode
hopping. One laser diode has been used for each beam of a three-beam, two
component system presented by Müller et al. (1996).
Pulsed laser diodes also open several additional avenues to achieve twovelo city component systems. If two lasers are used, the lasers can be alternately
pulsed at a high frequency. By synchronizing the laser pulse sequences with the
signal digitization, a technique known as »coherent sampling", a single photodetector and data acquisition chain can be used for both velo city components
(Wang et al. 1994a). Switch de-multiplexing or time-division multiplexing is
used on the detector signal to separate the two velo city components (Wang et al.
1994b). Multiple pulsed laser diodes for multiple velo city component measurements can also be replaced by time-delay techniques, either through additional
path lengths or by using fibers of different lengths. The principle of such a system based on path-Iength differences and using a pulse rate of 240 MHz is illustrated in Fig. 7.33, adapted from Wang et al. (1994a).
Several two-velocity component systems have been realized using a single laser line and high frequency optical multiplexing between orthogonal measurement volumes (Resagk et al. 1995). The multiplexing has been achieved using an
integrated optical switch embedded in a lithium niobate substrate (LiNb0 3 ),
manufactured using the proton exchange process. The obtainable power levels
through such devices are, however, quite modest.
Most two-velocity component systems are arranged with orthogonal components. Karlsson et al. (1993) have investigated errors which arise when the
alignment is not exactly orthogonal, but is assumed so. Normally, this error is
negligible; however, inthe case of boundary layers, where both the meanvelocityand the magnitude of the fluctuations is much greater in the streamwise direction than in the wall normal direction, even small deviations of the order of 1
deg can have considerable impact on the measurement quantities. To see this
effect, the velo city components u and v in the lab-fixed coordinate system (x,y)
can be expressed in terms of the measured velocity components um and vm and
the angle a, as shown in Fig. 7.34, assuming the x velo city component to be correet, i.e. u = um.
7.4 System Description
V=_I_(V m
cosa
-umsina)
395
(7.169)
(7.170)
1 -(um-V"
-----;:;.)
U"
V =m -Um sma
(7.171)
cosa
I\ lirrors
Ligh l pulses:
-.D
"
!
=iF-=
!
I
I
--.L.....'~
~I
-
~I
ßcam
hi fI rcgiSlcr l
+
[ 0 cilla lor
Fig. 7.33. A schematic diagram of a HF-pulsed diode two-velocity component laser Doppler system using coherent sampling (Wang et al. 1994a)
Front vicw:
y
u
x
z
Fig. 7.34. Non-orthogonalityof a two-velocity component laser Doppler system
396
7 Laser Doppler Systems
Equations (7.169)-(7.171) can therefore be used to compute corrected values of
the flow quantities, if the rnisalignment angle a is known.
A second effect pointed out by Karlsson et al. (1993), which applies when a
four-beam, two-velocity component system is tilted to traverse the measurement
volume closer to the wall, or principally, when using the three-beam, twovelo city component arrangement, is the influence of the z velo city component
on the measurement. The geometry of the situation is sketched in Fig. 7.35. The
lab-fixed coordinate system (x,y,z), with its corresponding velocity components u, v and w is assumed to be aligned parallel to the wall. The corrected flow
quantities in this system orthogonal to the wall are given by
1
V=--Vm
cosß
u' v' ~
v'
1
1
--u:
v:
cosß
1-w'2sin 2ß
cosß ~V'2 cos 2 ß+ w f2 sin 2 ß
(7.172)
(7.173)
(7.174)
These relations have been derived assuming that the quantities W, u'w' and
v'w' are zero (in a two-dimensional flow). The influence on 11 and u'v' is negligible, since ß is typically only a few degrees. On the other hand v~ can be substantially influenced for small y, where v' goes to zero but w' remains finite. Beyond y + "" 5 (see section 7.1.1.4) the effect is negligible.
Fig. 7.35. Influence of system tilt in the y-z plane
7.4.3 Three-Velocity Component Systems
Especially in the field of turbulence research, it is often valuable to acquire three
velo city components simultaneously, allowing not only the computation of all
six terms of the Reynolds stress tensor but also higher order velocity correlations, e.g. tri pie correlations. The extension of the laser Doppler technique to
7.4 System Description
397
three velo city components is conceptually straightforward, one additional laser
source or a third color from an existing two-velocity component system can be
used to form a third measurement volume. A receiving optics, a detector with
color filter and a third signal processor, complement the system. The layout of a
commercial three-velocity component laser Doppler system is shown pictorially
in Fig. 7.36. This system uses the blue, green and violet lines of an Ar-Ion gas laser: six beams are focused at the measurement volume.
In practice several complicating factors arise in performing measurements
with three-velocity component systems. These factors are mostly related to the
fact that optical access to the measurement region is often limited. Hence, the
three measurement volumes cannot be aligned orthogonal to one another. A
further difficulty arises when the measurement volumes are not spatially coincident.
Restricted optical access leads to system designs in which all six beams enter
the flow channel through a single window. For liquid flows, an externally traversed three-velocity component system will not be feasible, even with refractive
index matching, since the measurement volumes will not move coincident with
one another (see section 14.3). This holds also for orthogonal systems, if they
can be used. Thus, three-velocity component systems for fluid flows are generally designed to be fuHy immersible.
The generalized system pictured in Fig. 7.37 measures three velo city components cI' c2 and c3 ' which are not necessarily orthogonal to one another. A
transformation to probe-frxed, orthogonal velo city components up u2 and u3 is
necessary using a transformation matrix
Fig. 7.36. Pictorial of a three-velocity componen t laser Doppler system
398
7 Laser Doppler Systems
One-velocity componcnt probc
X,
Xl
Int erseclion
planc
I'ronc- Ilx.,a orthogonal
<.:oordina tc system
Fig. 7.37. Three-velocity component laser Doppler system, showing measured velocity
components and probe-fixed, orthogonal coordinate system
(7.175)
A further transformation to a channel-ftxed, orthogonal co ordinate system
may also be necessary and can be performed either subsequently or be directly
incorporated into the transformation matrix. Since this final transformation is
very application specific, the following discussion considers results only in the
probe-fixed coordinate system (X p X 2 ,X 3 ).
The probe-ftxed coordinate system is aligned with the axis of the two-velocity
component transmission optics (x 3 ) and with the normal to the prob es' intersection plane (x 2 ). The transformation matrix is given by
S;
A=
!.L
s,
s2l
s2l
0
= sin(a;)
S2. =sin(a 2 -a.)
0; = cos(a;)
_!l
0.
s2l
s2l
° ~ 02S3 - S203
S.03 -0,S30rp
1
S2,t ~0 3
s2l trp03
° 3Srp
0
srp = sin( 41)
(7.176)
o~ = cos(4J)
trp = tan( 41)
where the angles a" a 2 and a 3 and their senses are defined in Fig. 7.37. In
many applications, the optical system can be arranged such that a , = 0 deg,
a 2 = 90 deg, and a 3 = 0 deg, in which case the transformation matrix takes the
simple form
7.4 System Description
l]
A=[_i ~
tantP
399
(7.177)
sintP
which in turn reduces to the unity matrix for an orthogonal configuration
(tP = 90 deg). A suitable transformation matrix into a cylindrical co ordinate
system is given by Carrotte and Britchford (1994).
Systematic errors are introduced if the terms a'! in the transformation matrix
A are not correct in magnitude. This refers in particular to the system alignment, as discussed in section 7.4.2 for two-velocity component systems. Indeed,
the 'angle' error is probably the one main reason why a laser Doppler system
may require calibration, for instance using a theodolite, as described by Boutier
and Lefevre (1986) or with a rotating wheel (Snyder et al. 1984).
At this point, it is important to consider the propagation of errors through
the transformation matrix. Errors in the measured velo city components &; will
propagate to the probe-fixed system as
Ou ; = du;
~
J,
uC j
=
cj
(7.178)
a;j&j
ou:
Assuming random errors in measuring C j' then Je) = 0 and
= o. This implies
that if the individual mean measurements are non-biased, then the transformed
mean velocities will also be non-biased.
However, the variance of the errors will not be zero, (0e))2 0, thus all the
Reynolds stresses will contain errors.
*
(7.179)
assuming ~ = 0, i.e. stochastic errors on different velocity channels are uncorrelated with one another. This equation shows that errors in the normal
stresses are always positive, whereas the shear stresses may exhibit errors of either sign. The simplified form of the transformation matrix given by Eq. (7.177)
illustrates that the components U~2 and u[u~ are especially prone to errors, since
the coefficients a31 and a33 can become very large for small values of the included angle between the probes tP. If the stochastic error is about the same
magnitude on the velocity components CI and c 3 ' then oe? = od = &2. The effect
of the transformation on the propagation of errors to u? and u{u~ are shown in
Fig. 7.38 as a function of the included angle tP.
This figure illustrates that errors explode for small angles between the probes.
Further examples can be found in Morrison et al. (1990) and in Carrotte and
Britshford (1994). This leads to the recommendation that the included angle tP
exceeds 45 deg for the measurement of turbulent quantities.
7 Laser Doppler Systems
400
~
6r-r-rrr-r-r-r-r-r-T,-.-.-.-.-.-.-.-.r-r-r-r-r-r-r-,-.-,-,
,
,,
,,
,,
511;11;
&'
I
I
1
1
tan'ljJ
sin 1jJ
~·~-1=--+----1
2
,,
,
511;'
1
&'
sinljJ
=-1=---1
\
\
,
\
\
\
\
2
30
,,
,,
,,
, ...
........
60
Included angle ql [deg]
90
Fig. 7.38. Normalized error in Reynolds stress terms due to coordinate transformation
Although the expectation of the mean velo city u3 is correct (non-biased), the
effect of the error amplification through the co ordinate transformation will be to
increase the required measurement time to achieve a given confidence level in
the results. This follows from a standard uncertainty analysis, in which the variance of a derived quantity can be estimated from the sum of the variances of the
input parameters times their influence coefficients (Kline and McClintock, 1953)
(7.180)
Both influence coefficients dU 3 I dC! and dU 3 I dC 3 will normally be strong functions ofthe included probe angle 9 for small values of 9.
At least one commercial, three-velocity component system has been offered,
which transmits all beams through a single front lens, thus greatly simplifying
system alignment. However, this necessarily leads to small included angles 9
for the third velo city component and, as analyzed by Chevrin et al. (1993), leads
to intolerable errors in the measurement ofturbulence quantities.
A further source of error when using three-velocity component laser Doppler
systems is the possibility of the signals obtained on each channel originating
from different tracer particles. The situation is pictured in Fig. 7.39, in which the
measurement volumes of the system from Fig. 7.37 are ShOWll, assuming each
probe is operating in backscatter detection mode. In a two-velocity component
system, multiple particle signals are avoided by invoking a coincidence time
window on each signal processing channel. A coincidence window is also used
in three-component systems; however, the measurement volumes are not necessarily spatially coincident, thus, a time coincidence window alone is not sufficient. The resulting error can be significant, since actually the spatial correlation
is measured for such particle pairs, rather than the correlation for separation
7.4 System Description
401
Receiver for c,
Receiver for
c, and c,
DeleClion volume
for c, and c,
Delcction VOllllllC for c,
Fig. 7.39. Detail of measurement volumes in a three-velocity component laser Doppler
system
zero. Thus, the error will depend on the dimensions of the detection volume, in
particular with respect to the microscales of the flow, i.e. how fast the correlation
falls off with separation. Further estimates of potential errors can be found in
Boutier et al. (1985), Eriksson and Karlsson (1995) or Browne (1989).
This error is best avoided optically. The receiving optics must be designed to
limit every channel to the same spatial volume. If backscatter probes are used,
this is achieved by cross-detection, meaning the probe transmitting one channel
detects the channel(s) from the other probe. Thus, only partides in the inter section volume are seen by the system.
Alignment of a three-velocity component system can be performed similar to
that of a two-velocity component system, described in the previous section. Fig.
7.36 pictures a two-velocity component probe and a one-velocity component
probe, all focused onto an alignment pinhole. Another alignment aid, especially
useful when the angle between the probes is large, is to replace the pinhole with
a steel ball bearing. Each beam is aligned until it reflects concentrically back
onto itself. The reflected pattern can be visualized by placing a screen between
the probe and the ball bearing, with holes punched out for the outgoing beams.
7.4.4 Multi·Point Systems
There exists considerable interest in measuring components of the spatial correlation function R i/x k ,t,rk'7:). As outlined in section 7.1.1, this function yields
information about the length scales of turbulent motion and is increasingly used
for purposes of modeling turbulence. Furthermore, two-point or multi-point laser Doppler systems must not necessarily invoke the Taylor hypo thesis to estimate flow gradients. Thus, the direct measurement of the individual terms in the
dissipation equation becomes possible, in principle.
Practically, such systems have been realized either by scanning the measurement volume quickly through the flow region of interest (Durst et al. 1981, Chedroudi and Simpson 1984, Shinpaugh and Simpson 1995), by aligning the measurement volumes of separate systems dose to one another (Nakatani et al. 1986)
or by generating a larger measurement volume and acquiring additional information about each tracer partide position (Strunck et al. 1998). Also mixed systems, in which three velocity components are acquired at one position while two
402
7 Laser Doppler Systems
components are acquired at another position, have been successfully used to investigate the three dimensionality of complex turbulent boundary layers
(ÖI<;:men and Simpson 1995). Somewhat related to multi-point systems is the
dual cylindrical wave laser Doppler system for the measurement of wall shear
stress, first introduced by Naqwi el al. (1984) and analyzed further by Bultynck
(1998). In this instrument, tracer particles throughout the entire viscous sublayer of a wall boundary layer are detected and contribute to an estimation of
the wall shear stress.
In the following discussion, so me important considerations concerning the
opticallayout of two-point systems will be addressed. These issues also apply to
multi-point systems. Considerations about the processing of data from such
systems are given in section 11.3.
A prime objective with two-point systems is to make accurate measurements
of the turbulent microscales A ii,k (see Eq. (7.46)). For this, the spatial correlation
function must be very accurately measured for sm all spatial separations. This is
the portion of the function, to which a parabolic curve fit is performed to estimate Aii,k' For large separations, a measurement of the spatial correlation function is far less problematic, but often also of less interest. Despite numerous
studies involving two-point systems (Morton and Clark 1971, Bourke et al. 1971,
Drain et al. 1975, Fraser et al. 1986), the consequences of the coincidence window and the overlap of measurement volumes at small separations was only first
considered by Absil (1988, 1995) and Absil et al. (1990). Applying a coincidence
window, within which signal pairs from the two measurement volumes will be
accepted, turns a spatial correlation measurement into a space-time correlation.
Thus, the coincidence window must be chosen smaller than the microscales of
the turbulence, under which the autocorrelation function is still approximately
unity R( T cw) "" 1. Indeed, it appears the entire issue of coincidence window
choice may be superfluous when appropriate estimators are used, as discussed
in section 11.2 (Müller et al. 1998).
The finite size of the measurement volumes and their overlap can lead to a
distortion of the measured spatial correlation, generally know as the geometric
bias. This has been studied extensively by several authors (Tummers et al. 1994,
1996, Belmabrouk et al. 1991) and especially by Benedict (1995). The magnitude
of this bias depends also on which component of the correlation function is being measured. The time dependence of the space-time correlation is dropped
and only the spatial correlation function of the i th and j th velo city component
Ri/x,y,z) is considered. An optical configuration is assumed in which the optical axis is aligned with the z coordinate and x is the main flow direction. The
situation for the longitudinal correlation Rll (.dx,O,O) is pictured in Fig. 7.40,
adapted from Benedict (1995).
If forward scatter detection is used, particles will be detected over the entire
length of the measurement volume. Signal pairs arising from two particles will
have an effective separation larger than the intended L1x, depending on the exact particle trajectories. A similar bias occurs for the functions Rll (O,L1y,O) and
R11 (O,O,L1z). For this reason, microscale measurements can only be successful if
a side-scatter detection is employed, which gready reduces the length of the de-
7.4 System Description
a
Bursl pair from
IWO
403
b l3ursl pair from a single panidc
panides
x · n =J. '+
tu ,." =tu
z
/l j
z
Fig. 7.40a,b. Measuremen t volume orienta tion for Ru (Ax,O,O). a Forward sca tter detection volumes, b Side-scatter detection volumes
tection volume, as indieated by the projeeted cireular pinhole apertures in Fig.
7.40.
Depending on the co in eiden ce time window, single partides may also lead to
two signals on eaeh of the ehannels, in whieh ease a preference for faster partides, whieh fall within the time window, will result. This is similar to the bias diseussed by Brown (1989) for non-orthogonal, three-veloeity eomponent systems.
In fact, even with side seatter, the finite size of the measurement volume wiU
always lead to a geometrie bias and only when the volume dimensions are of the
order of one Kolmogorov length seale ean the measurements be eonsidered fuUy
unbiased (Benediet 1995). This is a rather stringent requirement and is not easy
to verify. One reason is beeause the geometrie bias does not effeet the measured
mean and varianee of the tlow velo city and even the maximum eorrelation eoefficient at zero separation may attain values in exeess of 0.999. Nevertheless, the
shape of the correlation funetion at sm all separations ean still be biased, thus
affeeting microseale estimates. The geometrie bias of the spatial eorrelation
funetion eannot be deteeted in the measurement parameters.
A good summary of the situation is given in Fig. 7.41, showing the various
measurement volume orientations for all Rll eorrelations and assuming a near
spherieal measurement volume. Coneeptually, the same applies for the other
eorrelation eomponents. If coincidenee in time is demanded, then any volume
separation displaying overlap will quiekly become effeetively zero for lateral and
spanwise eorrelations, sinee single-partide, dual-signal events will dominate. A
typical measured spatial eorrelation funetion, taken from Benediet (1995) is
shown in Fig. 7.42. These measurements were performed in the tlow behind a
baekward-facing step at a position where the measurement volume size was
about two Kolmogorov lengths. Even under these eonditions, the spatial correlation function shows a tlattening for small separations, indieating a residual
geometrie bias.
Interestingly, the longitudinal eorrelation appears to possess infinite spatial
resolution, assuming that this aligns with the dominant velocity eomponent. A
logieal eonsequenee of this reasoning is that the spatial resolution for all eorrelation eomponents improves as the turbulenee intensity inereases, i.e. when
there is no longer a dominant tlow eomponent.
404
7 Laser Doppler Systems
For two-point correlation measurements, estimators must be carefully chosen
to avoid such effects, arising from the fact that coincidence of both channels is
demanded. One such 'non -coincidence' estimator is presented in section 11.3.
Non-overlapping
RI1 (Ax,O,O)
Xl
Longitudinal
:
& 'ff = Ax
Rl1 (O,Ay,O)
l
Transverse
~'
Spanwise
• r
AX'ff =0=&
AX'ff = &
0
0
@
0
•
..
•• •
Az
Az'ff =O,tAz
Az'ff = Az
11
Ay,!! =O=Ay
AY'ff = O,tAy
AY'ff = Ay
RlI (O"O,Az)
Totaloverlap
Overlap
'ff
r"
=O=Az
Fig. 7.41. Two-point velo city measuremen ts with a dominant velocity component
i
••••••••• Xx
X·x
• • X
•
c
"
'0
. 1:
~ 0,98
o
u
.2
"E'"
::;
u 0.96
x
SO
•
SO
Ils coincidcncc, 100 Ilm pillholc
Ils coillcidence, 200 fll11 pinhole
0.94
0.02
0.01
0.00
0.01
0.02
Position z Ilf I-I
Fig. 7.42. Spanwise correlation coefficient measured behind a backward-facing step of
height H (Benedict 1995)
7.5 Laser Transit Velocimetry
405
7.5 Laser Transit Velocimetry
Particularly at high velocities, the slip velo city between the seed particles and the
flow is best minimized by choosing submicron particles; however, these then fall
into the Rayleigh scattering range in which the scattered power is proportional
to d;. To maintain particle detection probabilities, a drastic increase in incident
power is then required. If this is achieved through a stronger focussing of the laser Doppler measurement volume, eventually only two fringes are left and the
velo city measurement becomes a time-of-flight method. This, however, is not
the most effective way to construct a time-of-flight instrument based on two
light barriers. The laser transit velocimeter (LTV) technique is much more effective.
In the LTV technique, sometimes referred to as the laser-two-focus (L2F)
technique, two laser beams are highly focused next to each other in the flow.
Foci of 5 ... 20!-Lm and separations ofAx "" 50 ... 200!-Lm are typical for measuring
velocities in the 500 ... 1500 m S-1 range. This measurement principle is sketched
in Fig. 7.43, which shows the LTV measurement volume. Two photomultipliers
are focused onto each of the beam waists, very often in a backscatter arrangement, since one main application area of LTV is turbomachinery, where only
one optical access is available (Schodl 1975, Schodl 1977). A particle passing in
the main flow direction through both volumes results in a signal on each of the
photomultipliers, with a time delay inversely proportional to the velo city. If,
however, the trajectory of the particle has any small deviations, then the particle
may only cross one volume and as such, cannot be processed. Thus, the LTV is
very weH suited for measuring laminar flows or at least very weH directed turbulent flows.
Two methods are commonly used to determine the transit time. The first
method is a direct measurement of the time-of-flight, for instance with a multichannel analyzer or a purpose-built electronics. This assurnes that the particles
Signal processing
1
M=-(Mt+M L )
2
VI
~ ~
,
I
,(
v,
/I!casurcmcnl volume
Fig. 7.43. Measurement principle of the laser transit technique
1\
•I
406
7 Laser Doppler Systems
follow one another at intervals larger than the transit time and furthermore, that
there exists negligible background noise from unpaired bursts. Estimates of the
allowable particle concentration are given below.
A more robust method is to use the cross-correlation between signals from
the two photodetectors. Ideally, noise will contribute only to the background
level of the correlogram and the peak will correspond to the inverse of the flow
velo city distribution. However, many factors can still lead to a distortion of the
correlogram. These effects include spatial and temporal velo city gradients
(Lading 1979) and transit time broadening (Mayo and Smart 1979). In general
these factors restrict any simple transformation of the correlogram to a velo city
distribution, to low levels of turbulence, typically less than 15 % (Brown 1983).
Erdmann (1983) proposed a model for LTV based on particle statistics. This
expresses the shape of the correlogram in terms of characteristic flow parameters, including the velo city moments, the integral time scale and the dimension
of the measurement volume. Measurements performed by Schachenmann and
Tropea (1987) indicate that using this method, the LTV technique can be used
up to turbulence levels of 300/0. For lower levels of turbulence, the procedure is
such that aseries of measurements are performed with the optical system rotated about its optical axis at various angles about the main flow direction a. At
each angle, a probability histogram of the time-of-flight At is recorded, as
shown in Fig. 7.44 for the joint histogram h(At, a).
The velo city components
u =Iulcosa,
(7.181)
v =Iulsina
are computed for each of k velo city classes and their average values are given by
joinl probabi lily "( I,a)
[-J
1.0
0.5
0.0
20
Time of[ligh l
Flowanglc
aldcg ]
Ll/llls j
o
0.0
Fig. 7.44. Joint probability histogram of time-of-flight and flow angle
7.5 Laser Transit Velocimetry
407
(7.182)
(7.183)
with
(7.184)
In these equations, 1 is the number of angular positions, N ij is the number of
measured velocities at the angle j in the velo city dass i, which is weighted by the
data rate M, since the partide rate is correlated with the instantaneous velocity.
The mean absolute velo city is simply
(7.185)
and the mean flow direction is given by
_
u
a = arctan-=-
(7.186)
v
Further analysis yielding u/ 2 or v/ 2 is possible.
The dimensions of the measurement volume are chosen under several constraints. Schodl und Förster (1991) indicate the effects of a larger or smaller
beam focus and separation. A decrease ofbeam separation at constant beam diameters will increase the range of partide trajectories which will be properly
registered. The data rate will increase and the number of rotational positions
will decrease, also decreasing the measurement duration. However, the measurement error will increase.
For a given maximum allowable error, the measurement duration can be
minimized by matching the beam separation to the turbulence level. For instance, for a beam waist diameter of 10 /-lm and 1 % turbulence, a 1 % measurement error can be achieved for aseparation of 350/-lm. At 10 % turbulence, a
separation of 70 /-lm should be used. Using the 350 /-lm separation in a flow with
10 % turbulence would increase the measurement duration by a factor of five
(Schodl and Förster, 1991).
To insure single realization operation, the measurement volume can be approximated by an ellipse and the maximum allowable partide concentration is
then given by (section 5.1.7 or 7.1.3)
_ 0.1
n <-=0.1
Vo
8A b
Ab
=0.032-3 2.531t do L1x
do Llx
2
3
(7.187)
For a wavelength of Ab = 488 nm, a beam of dwb = 10 /-1ill and aseparation of
Llx = 500 /-lm, this concentration is about 3 x 10 3 cm- 3 • This limit already lies weIl
above natural atmospheric seeding, as indicated in section 13.4.
408
7 Laser Doppler Systems
Note that the light forming the measurement volume must be neither coherent nor monochromatic. The choice of lasers as a light source is mainly because
of their high intensity and good focussing properties. Especially high-powered
laser diodes are very attractive for this application, due to their compactness.
More re cent systems have extended the technique to also measure two or
even three velo city components simultaneously (Schodl 1998, Karpinski et al.
1999).
410
8 Phase Doppler Systems
If the particle is assumed spherical, the measured phase tP r from one detector
and for one scattering order can be linearly related to the particle diameter. For
reflection the relation between particle diameter and detected phase is given by
Eqs. (5.104) and (5.200) to (5.203), as in section 5.3.2.1
tP;I)
dA~I-COSlf/r cosr/Jr cos~+sinlf/r sin~
= nf
b
-~I-COSlf/r cosr/Jr cos~-sinlf/r sin~)
"" n.fi d
Ab
sin If/r sin %
P
~1-COSlf/rcosr/Jrcos~
2n % 'f/;{
",,-d - -
Ab
P
sin~;{
~n dp ~cos'f/;{
""
sin%
sin 1lr
"f'r
for
<t:
1- cos If/r cosr/Jr cos~
for
sin8"" 8 /\ sinlf/r "" If/r /\ r/Jr > 28
for
r/Jr = 0 deg /\ If/r > ~
(8.2)
b
and for first-order refraction from Eqs. (5.104) and (5.213) to (5.216), as in section 5.3.2.2
tP(2) = 2n d ( l+m 2-m.fi ~l+sinlf/r sin ~+coslf/r cosr/Jr cos~
r
Ab
P
2n
""--d p
Ab
l+m 2-m.fi ~1-sinlf/rSin~+COSlf/rCOSr/JrCOS~)
m sin If/ sin ~
r
.fi~(I+CJ(l+m2-m.fi~l+Cc)
2n
"" --m d
Ab
~'f/;{
-:------:--r~~~==:=====c
Plcos~;{I~I+m2-2mlcos~;{1
2n d
""--m
Ab
P
Jl
% sin 'f/;{
fi
or
fior
r/Jr
,
Cc=coslf/rcosr/Jrcos~
sin IIr
"f' r
"" IIr
"f' r /\
(8.3)
sin 8 "" 8
/\ sinr/Jr > sin28
= 0 deg /\ sin If/r > sin ~
+ m 2 - 2mlcos 'f/;{I
Using two detectors, the measurable phase difference between the detectors
remains linearly related to the particle diameter. The phase difference between
two spatially separated detectors is given by
These relations are given by Eq. (5.221) for reflective dominated scattering
(N = 1) and by Eq. (5.225) for first-order refracted light (N = 2) in a standard
phase Doppler configuration. The factors F~N) are known as the phase conversion factors (see section 5.3.2.3) and relate the measured phase difference to the
particle size for a given scattering order N. The inverse of the phase conversion
8.1 Selection of the Optical Configura tion
411
factor is the diameter conversion factor, sometimes called the geometrical factor, and is denoted by Pt) = (F~N)tl. Note that these factors are defined for the
phase difference and not for the phase of a single receiver.
One of the primary considerations when selecting the optical configuration of
a phase Doppler system is, therefore, where to place the detectors to insure that
only one scattering order dominates. The distribution of the various scattering
orders has been discussed extensively in section 4.1.3 for the case ofhomogeneous waves and in section 4.2.3 for the case of inhomogeneous incident waves. It
was demonstrated that an ideal detector position will depend on the relative refractive index of the particle, its diameter and the polarization of the incident
light. Therefore, the following discussion concerns the selection of detector and
aperture positions to match the desired measurement range in terms of these
parameters.
Following this discussion, single-point phase Doppler systems will be examined in section 8.2 before describing more specialized considerations in section
8.3 and multi-dimensional realizations ofthe phase Doppler principle in section
8.4.
8.1 Selection of the Optical Configuration
Already in section 2.2 it became evident that a particle size measurement on the
basis of the phase Doppler technique requires a minimum of two detectors focused onto the measurement volume of an otherwise conventionallaser Doppler
system. Fig. 8.1 reviews the essential geometric parameters of the optical system:
the beam intersection (full) angle B, the off-axis angle (in the y-z plane) rfr' and
the elevation angles ±V' r' usually chosen symmetric about the y-z plane for each
of the two detectors.
Consider first the case ofhomogeneous incident waves on the particle and reexamine for instance the intensity distributions of scattered light given in
Fig. 4.32 for a water droplet in air and for parallel polarization of the incident
waves. For the range of droplet sizes shown, 10 /Jl11 ... 1000 /-lm, second-order
Laser
beams
Parlide
x
Receiver
aperture
Fig. 8.1. Optical arrangement for the standard phase Doppler technique
leasured
412
8 Phase Doppler Systems
refraction clearly dominates by at least two orders of magnitude in the angular
range 30 deg to 80 deg. Therefore an optical configuration could be chosen,
such that the scattering angle 13 s lies in the range 30 deg < 13 s < 80 deg for each
beam/detector combination. This can be generalized as 13 m;n < 13 s < 13 max. Recalling again the nomenclature of section 2.2 and chapter 5 (index br: b - beam 1
or 2; r - receiver 1 or 2), the following condition should be satisfied for each detector
cos 131r
= cost/Jr cos( IfIr -~)
(8.5)
COS 13 2r
= cost/Jr cos( IfIr +~)
(8.6)
Of course there are an infinite number of possibilities to satisfy these relations; however, it is impractical to attempt to independently position two detectors in such a way that they are both focused onto the same measurement
volume. Especially when using slits or pinholes for definition and reduction of
the detection volume size (section 8.3.2), the alignment is very difficult and the
system cannot be moved without re-alignment. For this reason detector positions are usually chosen such that all detectors are focused onto the measurement volume through a common lens or at least using a common probe.
One solution, which allows this and can also satisfy Eqs. (8.5) and (8.6) is to
choose the same off-axis angle for each detector (t/J1 = t/J2 = t/Jr) and to choose
symmetric elevation angles, 1fI 1 = -1fI 2 • Since IfI r is generally very small in such
configurations, the condition
(8.7)
is often sufficient to insure that a single scattering mode dominates. This is the
optical arrangement illustrated in Fig. 8.1 and it is known as the standard phase
Doppler system. Details ofthis arrangement are given in section 8.2.1
Another configuration satisfying Eqs. (8.5) and (8.6) and still allowing collection through a common lens is to maintain t/J1 = t/J2 = 0,
(8.8)
13 max < 13 2r
= IfI r + ~
(8.9)
and thus the elevation angles of the detectors must lie in the range
(8.10)
Such an optical configuration is shown in Fig. 8.2 and is known as a planar
phase Doppler system, since the detectors lie in the same plane as the beams.
This system will be discussed in more detail in section 8.2.2.
In general, the two detectors can be placed wherever the two receivers are not
detecting the exact same fringe, and thus the phase difference is non-zero for the
considered scattering order.
In practice, light scattering diagrams as illustrated in Figs. 4.29 to 4.32 are
only necessary to calculate for unknown droplet media, since the situation for
many common particles has already been analyzed. Table 8.1 summarizes some
8.1 Selection of the Optical Configura tion
413
Fig. 8.2. Optical arrangement for a planar phase Doppler system
Tahle 8.1. Relative refractive indices of common fuels, liquids and solids at 273 K
Particle and medium
Air bubble in water
Air bubble in freon
Latex in water
Glass in water
Water in air
Ethanol in air
Heptane and dodecane in air
Diesel in air
Benzene
Glass in air
Latex in air
Relative refractive index m
0.75
0.833
1.192
1.132
1.33
1.36
1.39
1.45
1.50
1.51
1.59
common partides and their relative refractive indices. In Figs. 8.3 and 8.4 the regions of dominant (by one order of magnitude in the partide diameter range
10Ilm to 200llm) scattering orders are plotted via scattering angle and refractive
index for both polarization components.
Some recommendations for detector positions can be made for different partides, as summarized in Table 8.2, adapted from Dantec Dynamics (1999) and
from Figs. 8.3 and 8.4. Characteristic (limiting) scattering angles given in Fig.
4.33 as a function of relative refractive index are also plotted in Figs. 8.3 and 8.4.
Given that one single scattering order dominates the light received at the detectors, the relation between the phase and the particle diameter should be linear, as expressed by Eq. (8.2) for reflection and Eq. (8.3) for first-order refraction. In fact, this result is obtained only for geometrical optics, because if a
Lorenz-Mie computation is performed, deviations from the linear relation occur. These deviations have their origins in the fact that additional scattering orders begin to become influential. Especially for small particles the assumptions
of geometrical optics are no longer valid and the scattering characteristics are
influenced by surface waves and a smearing of the scattering orders. This is easily seen by inspection of Figs. 4.30 and 4.32 in relation to Figs. 4.29 and 4.31 for
the three particle sizes shown.
414
8 Phase Doppler Systems
2.0 D""T"1rTT"1rTT"1"TT"T"TTT"TTTTTTTTTTTT"TTT"I"TT1rTT"1rTT"1"TT"1"TT"T"TTT"TTTTTTTTTTTrTTT"n-nrTT"1n"nn"n"TT"T-r.w. . . ....,.,.
><
~
1.8
"0
.S
<;
.::
. . . . . . Ra i nbow angle
- - - . Critical angle
1.6
ü
-=~"
.~
.,
IA
1.2
0;
.::::
......
1.0
----
Dominant cattcring order >90%
Refleclion (I)
0.8
<30% 30% ... 40% ... 50% ... 60% ... 70% ... 80% ... 90% >90%
__ _
DD
D
Sacttering angle
Fig. 8.3a,b. Scattering angle regions of dominant scattering order for perpendicular polarization as a function of scattering angle and relative refractive index. The maps are
processed
from
scattering
functions
of
particles
in
the
range
X M = 64.4 ... 1290 (10 Ilm ... 200 Ilm). a The regions where 90% of the scattered intensity
comes from only one scattering order are indicated with gray levels for the different scattering orders. The contour lines give the 92%, 94%, 96% and 98% regions of dominance,
b Minimum percentage of intensity of the strongest scattering order to the overall scattered intensity for all particle diameters X M = 64.4 ... 1290 (10 Ilm ... 200 Ilm)
A eomparison between the computed phase differenee using geometrieal opties and Lorenz-Mie is shown in Fig. 8.5a for a typieal standard phase Doppler
eonfiguration and for a point deteetor. However, all deteetors exhibit a finite aperture and this has an integrating and smoothing effeet on the eharaeteristie
phase differenee/diameter relation, as shown in Fig. 8.5b. For this seeond computation a reetangular aperture of 1.24 degx 6.26 deg has been used. For any new
8.1 Selection of the Optical Configuration
--
2.0
x
1.8
-
<J
I
"a
C
...
.~
..
/
1.6
,-
/
/
Ci
.!::
~
415
1.4
(I)
,,-
...
.?;
"
t:i
1.2
(3)
c:.:
1.0
Do minanl callcrin g ord er >90%
Rc!lcclion (1)
I" rdcr rcfraclion (2)
_
2'''' order rcfraclion (.~)
0.8
--
.=
...x
"U
.::'"
Ci
..::'"
~
'">
'"
t:i
0::
150
<30% 30% ... 40% ... 50% ... 60% ... 70% ... 80% ... 90% >90%
_
__ -000
D
180
Sacttering angle 0, [degJ
Fig. 8.4a,b. Scattering angle regions of dominant scattering order for parallel polarization
as a function of scattering angle and relative refractive index. Thc maps are processed
from scattering functions of particles in the range XM = 64.4 ... 1290 (10 11m ... 200 11m) .
a The regions where 90% of thc scattered intensity comes from only one scattering order
are indicated with gray levels for the different scattering orders. The contoUf lines give
the 92%, 94%, 96% and 98% regions of dominance, b Minimum percentage of intensity
of the strongest scattering order to the overall scattered intensity for all particle diameters X M = 64.4 .. . 1290 (10 11m ... 200 11m)
measurement situation therefore, it is helpful to check the linearity of this curve
for the exact detector positions and apertures being employed.
It is worth noting that the phase Doppler technique is not very workable in
backscatter ( 15 s > 150 deg). This is unfortunate, since backscatter laser Doppler
probes have proven extremely convenient in terms of traversing and alignment,
while also requiring only one optical access to the measurement position. The
416
8 Phase Doppler Systems
Table 8.2: General recommendations for detector positioning and polarization angle in
phase Doppler systems, z'J RB - rainbowangle, z'J TR -angle of total reflection
Particle type
Scattering
order
Polarization
Reflection
11
Scattering angle
Totally rejlecting:
Im{~}»l
or.1
Any angle except forward diffraction region
z'J, > arcsin(91 XM)
Two Phase jlows:
.1
11 or.1
Optimum near total reflection: z'J, = 13 TR
z'J, "'(m-1)xllOdeg
11
22.4 degx.Jm -1 < iJ, < 90 degx J1- (m - 2)2
and z'J, >8deg
1.04 <m
Rcflection
1sI refraction
1SI refraction
1.04 < m < 1.24
1.38< m < 1.92
2nd refraction .1
2nd refraction 11
Rcflection
.1
m<0.9
0.9<m <0.98
Special Examples:
Air in Water
Reflection
Water in Air
Refraction
z'J, '" z'J RB
13,~z'JRB
Separate regions: 105 deg < 13, < 144 deg
z'J, =85 deg
Near Brewster angle: 65 deg< z'J, < 72 deg
b
a
Cö
<>
0
~
s'"
"<:)
<.>
'.0
c
...
<)
~
'i3 180
Co>
.,
'"
..t::.
C.
"0
C
'"
S
~
..t::.
c..
Particlc dia meier clp IflmJ
Parlide diameier clp IflmJ
Fig. 8.5a,b. Phase difference/diameter relation calculated with geometrical optics and Lorenz-Mie theory (A b =514.5nm, ljI,=l.72deg, ~,=60deg, m=1.333, e=4.352deg).
a A point-like detector, b A finite size detector (Llljl, = 1.24 deg, Ll~, = 6.26 deg, Mask B)
phase Doppler arrangements suggested by Figs. 8.3 and 8.4 and in Table 8.2 on
the other hand, always require two optical windows.
The reason for this restrietion can be seen in the Figs. 8.3 and 8.4. At large
scattering angles ( tJ, > 150 deg), which are suitable for integrating both the out-
8.2 Single-Point Phase Doppler Systems
417
going beams and the scattered light into one probe with a single front lens, no
one scattering mode dominates over a large size range (Figs. 4.29-4.32), but especially not over a change of refractive index (Figs. 4.34 and 4.35). Bultynck
(1998) and Bultynck et al. (1996) have proposed specialized systems in which
either reflected light in Alexander's dark band at a high refractive index can be
used (Figs. 4.35d-f, 8.3) or second-order refracted light is used at even high er
scattering angles. Although a working prototype using this coneept has been
demonstrated, both the signal-to-noise ratio and the signal amplitude were low.
Further possibilities of realizing a particle-sizing instrument using light seattered at high scattering angles will be discussed in seetion 9.2.
8.2 Single-Point Phase Doppler Systems
8.2.1 Three-Detector, Standard Phase Doppler System
The first realization of a phase Doppler system was a standard system, as already
illustrated in Fig. 8.1 (Bachalo and Hauser 1984). The relation between particle
diameter and phase differenee is given by Eq. (8.4) and can be written for symmetric elevation angles (lf/ r = lf/1 = -lf/ 2) for reflection as
LltP~~ = !1J~ d p = J2 2n dA ~1- cos lf/r cosq.)r cos% + sin lf/r sin %
Ab
- ~1- eos lf/r cosq.)r eos% - sin lf/r sin %)
"'" J2 2n d
Ab
p
sin lf/r sin %
~l-coslfFrcosq.)rcos%
for
<E
sin lf/r sin %
(8.11)
1-eoslf/rcosq.)rcos%
Error
10%
E
0.785
1%
0.1 %
0.279 0.089
and for refraction as
LltP(2) - /i2)d
12 -}J12
p
=22n d ( 1+m 2 -mJ2~l+coslf/rcosq.)rcos%+sinlf/rsin%
Ab p
-
1+m2-mJ2~1+COSlf/reoSq.)rCOS%-sinlf/rSin%)
"'" -2 2n d msin lf/r sin %
Ab
p
v~1+m2-mv'
(8.12)
v= J2~1+ eos'f/ r cosq.)r cos%
It is apparent from Eqs. (8.11) and (8.12), or for example from Fig. 8.5, that a
2n phase differenee ambiguity will oeeur onee the particle size exeeeds a given
value. This value ean be approximated for small intersection and elevation angles (see Eq. (8.2» and for regions of dominant reflection as
418
8 Phase Doppler Systems
(8.13)
or for first-order refraction (see Eq. (8.3» as
d(2)
p,max
=
21tp(2)
4>,12
'"
A Icos~;;il ~+m2 -2mlcos~;;i1
b
m
-'----_--'-V-'---_ _ _ _'---_-'BI
If/r 12
(8.14)
There are several methods to overcome this 21t ambiguity and to extend the
measurement size range beyond the limiting diameter. One method is based
completely on software and has been discussed fuHy in section 6.4.1. It exploits
the fact that as the particle diameter increases, a time shift of the signals also
arises. Therefore, the time shift of the signals must be determined in addition to
the phase difference.
More commonly however, hardware solutions are used in the form of one or
more additional detectors. The most widely used arrangement is the threedetector standard phase Doppler system, pictured in Fig. 8.6. The three detectors
are designated U I , U 2 , and U 3 (because they measure the u component of velocity) and they are used in the foHowing manner. Three phase differences are
measured for each particle, the phase difference between detectors UI and U 2 ,
AlP12 , the phase difference between detectors UI and U 3 , AlPI3 and the phase
difference between detectors U 2 and U 3 , AlP 23 • Due to the different elevation
angles, the phase difference/diameter relations for the three detector pairs are
different, the closely spaced pair yielding a relation which is less steep. Two of
the three phase differences are linearly independent and can be used for two independent particle diameter estimations. The third measurement can be used as
a validation criteria because the sum over all phase differences must vanish.
(8.15)
This is iHustrated schematically in Fig. 8.7. The measured phase difference
AlPI2 could correspond to several different diameters, as shown in Fig. 8.7.
However only one of these will be in agreement with the diameter indicated by
Particlc
Measured
curvatur~
z
Fig. 8.6. Optical arrangement of a three-detector, standard phase Doppler system
8.2 Single-Point Phase Doppler Systems
419
Phase difference
- - - <l> u (<I>, -<1>,>
- - - - t.~~ 1l (<I>, - <I) ,)
<I> Ideg)
w.
360 deg
[/,
_ U,
y-z plane
_
U,
diameter
Fig. 8.7. The phase difference/diameter relations of a three-detector, standard phase
Doppler system and their use to extend the size range beyond a phase difference of 2n
the phase difference LltP13. The phase difference ofthe outer receiver pair LlcP\~)
is ambiguous in diameter and is given, for positive phase conversion factors, e.g.
reflection N = 1, as
"",(1)
LJ'#12
=
ß(1)d
12 P -
2nn 21t
(8.16)
whereas the phase difference of the neighboring receivers LlcPP3) leads to a single
diameter
(8.17)
The number of 2n jumps can be found from the measured phases as
n21t =
int[_I_(ß)~:
LlcP~~) - LltP~~) + 0.5]
2n ß
(8.18)
13
In practice not all measurements fulfil exactly Eqs. (8.16) and (8.17). Some
tolerance must be accepted in the agreement of the two separately measured diameters and this can be implemented as shown in Fig. 8.8. Here the shaded areas
indicate a constant size or constant phase difference tolerance over the entire
measurement range. A constant relative size tolerance could also easily implemented in the processing software.
The use of three detectors resolves the 2n phase ambiguity and extends the
measurement size range of the instrument. Theoretically the size limit can be
extended to ab x 360 deg, where a and bare integers which do not have a common divisor and alb = ß 12 I ßl3' Because of measurement uncertainties and the
acceptance tolerance, the maximum size range is in practice restricted by the
measurement range of the detector pair with the largest phase conversion factor,
in general F<P.13'
The maximum measurable particle diameter becomes for reflection approximately
(8.19)
420
8 Phase Doppler Systems
<!:l " [lieg)
Non-acccplance
band
360
,
,,
,
,
,,
,
<!:l ,, [lIeg)
Fig. 8.8. Phase difference matrix for a three-detector, standard phase Doppler system.
Only measurement points falling within the tolerance areas will be accepted
and for refraction
(8.20)
The size range is increased as the elevation angle difference between detectors
U\ and U 3 or the intersection angle becomes smaller. In practice the range can
not be extended to the given theoreticallimit in Eqs. (8.19) and (8.20), because
the phase differences for small particles exhibit large scatter and can result in
"negative" particle diameters, which are interpreted by the system as very large
particles. Therefore, a non-acceptance band for phase differences near 360 deg is
usually implemented, as illustrated in Fig. 8.8.
Phase Doppler systems usually provide a means of changing the position (and
size) of each of the receiving apertures to allow the system to be matched to a
particular measurement task. One such implementation of a phase Doppler receiving probe is pictured in cross-section in Fig. 8.9, in which an interchangeable
aperture plate is shown. Possible aperture plates (masks) are shown in Fig. 8.10.
In this implementation, one lens in the probe is segmented, so that the received
light is focused onto three different receiving fibers. The apertures of the symmetric mask A correspond to the three lens segments. Mask Band C use only
portions of each lens segment. Further variation of the size range can be
achieved by changing the focallength of the receiving optics, Ir, or the intersection angle. The achievable size range with each mask can be estimated for reflection by
(8.21)
and for refraction by
d( 2)
p,m"",,
"'2~lcos~'/1/1+m2
-2mlcos~'/1
IJt
m
/2 V
/ 2 (D\ - DJ1b
(8.22)
8.2 Single-Point Phase Doppler Systems
421
Measurement
volume
\----=::....
\
Front lens
Aperture
plate
Multimode fibers
Fig. 8.9. Fiber optic receiving probe for a three-detector, standard phase Doppler system
(adapted from Dantec Dynamics (1999»
Notch corresponding to index pin
Fig. 8.10. Interchangeable receiving apertures (masks) for the probe shown in Fig. 8.9.
where Ir is the focallength of the transmitting optics, Ir the focallength of the
receiving optics, LJb the beam spacing and D] and D3 the receiver mask dimensions (e.g. given in Table 8.3 for the Dantec Dynamics system).
From Eqs. (8.19) to (8.22) the maximum measurable size can be seen to be
approximately linearly related to the focallengths and inversely proportional to
the beam spacing and receiver separation.
The sensitivity and size range of a three-detector, standard phase Doppler
system can also be varied by selecting a different off-axis angle. Furthermore,
the phase difference/diameter relation will depend on the refractive index for
Table 8.3. Parameters of the aperture masks of a three-detector, standard phase Doppler
system (Dantee Dynamics)
Parameter [mm1
MaskA
MaskB
Maske
R
Xl
20.05
13.30
20.05
6.70
20.05
2.10
X3
10.00
6.00
Dl
D3
12.65
9.35
2.00
7.05
0.00
2.00
4.00
._=
=_
.
...
422
8 Phase Doppler Systems
scattering orders involving refraction. These dependencies are illustrated in
Figs. 8.11 and 8.12 respectively, in which the inverse phase conversion factor
ßlf1 is shown for systems operating in reflection and first-order refraction.
Diameter measurements of particles with different refractive indexes, e.g. at
different temperatures, can be improved by using off-axis angles in the range of
-E n
b Retlection (N= I)
First·order rcfract ion (N 2)
2r-,-~--.--.--r--.-.--.-~~
30 n<-..-~-..-~-..-~-..-~~
::1.
OJ)
<.I
~
g~
I-
0
Ü
0.75
...::=
1:
.9
~
20
w -
I)
0.8jj
8
1. 132
">c:
0
...
1.192
'J
1.39
1,45
\.50
\.59
10
1333
<.I
<J
E
Regio ns wi thout geometrica l oplics solut ion
6"
0
0
90
0
90
180
Off-axis angle 1/J, ldcgl
Off-axis anglc 1/J,ldcgl
Fig. 8.11a,b. The change of inverse phase conversion factor with scattering angle as a
function of relative refractive index (Ab = 514.5 nm, 8 = 7 deg, 1fI, = 2 deg). a First-order
refraction, b Reflection
-
§.
0
10 dcg
OJ)
"
~
a~
...0
100 dcg
5
Ü
.ß
c:
0
.~
'"c
0
...
>
10
'J
"
<J
E
Ci'"
15
0.5
1.0
1.5
~O
~
Relativc refraclivc index
~o
111
I-I
Fig. 8.12. The change of inverse phase conversion factor with relative refractive index at
different off-axis angles (Ab = 514.5 nm, 8= 7 deg, 1fI, = 2 deg, first-order refraction)
8.2 Single-Point Phase Doppler Systems
423
ifJ r > 60 deg. The diameter conversion factor becomes more independent of the
relative refractive index in this range, as can be seen in Fig. 8.12. The best choice
of off-axis angle depends on the expected refractive index range and system parameters such as intersection angle and elevation angle. Larger off-axis angles
are generally better for the refractive index independence but the linearity of the
phase difference/diameter relation reduces because of the int1uence of other
scattering orders. If possible, the ret1ection mode should be used because the ret1ected light is independent of refractive index.
As already discussed, the dominance of one scattering order and the resulting
linearity between phase difference and particle diameter is the basis of the phase
Doppler technique. In Fig. 8.13 this linearity is shown for an example standard
system as a function of the receiver position. The mean deviation from the linearity is calculated from the phase difference of 800 different particle diameters
between 0.25/lm and 200/lm for water in air by LMT and compared with the
linear relation for pure reflection, first-order and second-order refraction.
For parallel polarization a large region ofhigh linearity dominance from firstorder refraction can be used, as expected from Fig. 8.4. For perpendicular polarization the linearity in the forward-scatter direction is much less (see also Fig.
8.3). The linearity increases for smaller off-axis angles ifJr '" 0 deg and larger elevation angles, resulting in asymmetrie planar configuration (see section 8.2.2)
with parallel polarization. Furthermore, there exist two very narrow regions with
high linearity. These can be identified with Fig. 8.3 as regions of dominant re-
Mean phase difference
deviation [deg]:
> 1 0 ... 9 ... 8 ... 7 ... 6 ... 5 ... 4 ... 3>
DDDD
Fig. 8.13. Mean deviation of the phase difference/diameter relation from an ideal linear
over
the
receiver angles (/fI, = /fit = -/fI2 = 1, 2, ... ,45 deg,
relation, plotted
(P, = 1, 2, ... ,180 deg) of a standard phase Doppler system and for the two different polarization orientations. (d p = 0.25, 0.5, ... ,200 Jlm, m = 1.333, e = 7.4 deg, Ab = 514.5 nm,
circular receiver, receiver collection angle 1 deg)
424
8 Phase Doppler Systems
flection and second-order refraction. Phase Doppler measurements with reflection (ifJ r "" 95 deg) can only be performed with small elevation angles, which
leads to a low diameter resolution, as can be seen in Fig. 8.11 b. The second-order
refraction can be used with larger elevation angles but the aperture shape must
be carefully designed because of the sm all usable off-axis region. Nevertheless, a
configuration at ifJr "" 140 deg will be very sensitive to parameter and partide
shape variations and will be difficult to align.
In summary, the measurement range and the sensitivity of a phase Doppler
system will depend on and can be adjusted through the following system parameters
Intersection angle, e
Focallength of receiving optics, Ir
off-axis angle, ifJr (also through the dominating scattering order)
Elevation angle, lfI r (e.g. choice of aperture mask and focallength of receiving
optics)
• Relative refractive index, m
• Angular region covered by the aperture of the receivers, ,dlfl rand ,difJ r
•
•
•
•
The selection of optical parameters is usually simplified using commercial software, which displays immediately the achievable measurement range. However,
several factors are not considered directly. For instance, changes of focallength
may also lead to strong changes in signal amplitude, as with laser Doppler systems. Furthermore, the calculated measurement size range is only a theoretical
limit. Two additional factors may come into play before this limit is reached.
The first of these factors concerns the sphericity of the particle. Large partides, in particular droplets or bubbles, will generally be exposed to aerodynamic
forces and may deform. The following discussion gives a physical interpretation
of the sensitivity to non-spherical smooth partides. Further information is presented in section 8.2.3 for oscillating non-spherical droplets and in section 8.3.3
for non-spherical, rough and inhomogeneous partides.
Each detector of the standard phase Doppler system collects scattered light
from two glare points on the partide surface, one for each laser beam. If, however, all detectors lie at the same off-axis angle, all glare points for all detectors
willlie on a meridian line over the partide surface, as shown in Fig. 8.6. If the
partide is non-spherical, then the two size measurements performed with the
three detectors will only differ insomuch that this meridian line, associated with
the meridian line corresponding to the incident points, changes its curvature
between the glare points or incident points. If this is the case, the non-sphericity
can be detected when the two sizes d p12 = Fp ,12,dtP12 and d p13 =Fp ,13,dtP13 derived
from the phase differences find no agreement for any 21t multiple, i.e. when the
measurement point lies outside of the tolerance band illustrated in Fig. 8.8. Experience has shown, however, that partides can displaya very large degree of
non-sphericity before the local surface curvature is sufficiently distorted to be
detected by a three-detector, standard phase Doppler system. This is because the
incident and glare points are located dose together on the same median line.
The second factor, which limits the measurable size is the displacement of the
8.2 Single-Point Phase Doppler Systems
425
detection volumes in space with increasing size. The three-detector, standard
phase Doppler system can be made less sensitive to this so-called Gaussian beam
(or trajectory) effect or to the slit effect by choosing appropriate masks. A carefuHy chosen layout of the system can also partly avoid these problems. These
effects will be discussed in section 8.3 because they apply to all phase Doppler
configurations.
The phase Doppler instrument determines the particle size from the measured phase differences. However, the particle velocity is also available from the
signal frequency, as with a laser Doppler system. For the system illustrated in
Fig. 8.6, the U x velo city component will be measured. If two velocity components
are required, two additional beams can be added to the transmitting optics, as in
a laser Doppler system. An additional detector must be added on the receiving
side, which by means of a color separator can detect light solely from the second
measurement volume. This second detector can, however, still use the same optics, receiving probe and fiber coupling as the detectors for the phase Doppler
system.
8.2.2 Planar Phase Doppler System
The optical configuration of the planar phase Doppler has been illustrated already in Fig. 8.2. In an interpretation similar to that given above, the glare points
seen by the two detectors lie on an equatorialline of the particle in the plane of
the laser beams.
The phase and diameter conversion factors can be calculated from Eq. (8.4)
by using an off-axis angle of zero degrees (r/J r = 0) and different elevation angles,
If/, ;f. 1f/2. For reflection these factors become
ACP;~ =ß;~dp = .{in
dpUI-COS(If/, +~)-~l-COS(If/, -~)
Ab
-~l- cos( 1f/2 +~) +~l- cos( 1f/2 -~))
= 2 2n
Ab
(8.23)
d psin ~ (sign( If/, )cos~ - sign( 1f/2)COS 1f/2)
2
2
2
(If/, > ~,1f/2 >~)
and for first-order refraction
LlCP~~) = ß~~)dp =
2n dp(~l +m 2 -.{i m~l-cos( If/,
Ab
-~)
-~1+m2-.{im~1-cos(lf/, +~)
-~1+m2 -.{im~1-cos(1f/2 -~)
+~1+m2 -.{im~1-cos(1f/2 +~))
(8.24)
426
8 Phase Doppler Systems
In Fig. 8.14 the diameter conversion factor is plotted as function of the two offaxis receiver angles in the region where one scattering order dominates. Unlike
a
z
z
b
- 180 r-r-,..,,.,--,--.--.---r--r:......r-:>a
t:>Il
"""
'"'" 135
öb
.,c:
c:
.2
~
~
90
45
c
QOI80~~~~~~~~~~~~~~~~~~§§~~~~e=~~~
"
~
;;;'
N
"
Ob
135
c:
'"
c:
:Rcgic)noT---- ---
.~
~
90
:dominan l
: refra lion
'"
@
2
:,
,
45
-90
o
90
180
Elc\ration angle I If, [deg l
Fig. 8.14a-c. Dependence of diameter conversion factors in rad/11m of a planar system on
the elevation angles Ij!, and 1j!2 ofthe receivers (8= 10 deg, Ab = 514.5 nm). aSymmetrie
and asymmetrie receiver set-up, b Diameter conversion factor for reflection, c Diameter
conversion factor for first-order refraction (m = 1.333). The region of dominant refraction are indicated with a dashed line
8.2 Single-Point Phase Doppler Systems
427
the standard configuration, all four scattering angles tJ11' tJ 12 , tJ 21 and 73 22 are
different and therefore the usable angular regions are smaller.
For symmetric and relatively small receiver angles, the diameter conversion
factor becomes large. Therefore, the planar system is more sensitive to particle
changes than the standard system and can be used for measurements of small
particles.
The 360 deg limit on phase difference for unambiguous diameter measurements leads again to a maximum measurable particle size and can be approximated for reflection and for first-order refraction for symmetrie receivers
(Ij!= Ij!l =-1j!2) by
""A~_l_
d(1)
p.max
d(2)
""
p.max
A
(8.25)
L1b cos v;{
It ~l+m2 -2mlcosv;{1
L1b
(8.26)
m sin v;{
and for side-by-side asymmetric receivers
(1j!1.2
= Ij! =+= LlIj!)
(8.27)
(2)
d pmax ""4A
.
IJr
L1bLID mcosv;{
(l+m 2 -2mlcosv;{1)
(
l+m 2
)
]I,
2
-2mlcosv;{1 -(msinv;{)
2
(8.28)
where It and Ir are the focallengths of the transmitting and receiving optics,
L1b the beam spacing and LID the distance between the apertures of the adjacent
planar receivers.
In Fig. 8.15 a planar optical arrangement is compared to a standard optical
arrangement by examining the diameter conversion factor as a function of relative refractive index and scattering angle for the same elevation angle difference
between the detectors. Note that the planar arrangement becomes extremely insensitive to size for large scattering angles. The sensitivity decreases also for a
low relative refractive index. The dashed lines indicate the regions where the receiver angle is larger than the critical angle of first-order refraction, according to
geometrical optics. Measurements with first-order refraction are not recommended in these regions. However, scattering for angles larger than the critical
angle can still be dominated by refraction, because of the contribution due to
surface waves surface waves, as seen in Fig. 4.32.
Furthermore, surface waves become more important for small particles.
When measuring small particles with a planar system this results in higher
scatter of the phase difference measurements and even phase differences with
opposite sign (negative particle diameters), Fig. 8.16a. This scatter, with opposite sign of the phase differences for small particles, also occurs if the integrating
effect of the aperture is considered, Fig. 8.16c. U sing scattering angles far removed from the critical angle can reduce this effect. This is also one reason why
428
8 Phase Doppler Systems
S
:::1.
bfJ
<))
0
::2.
3~
<:Q.
...0
-2
Ü
eS
c:
0
.V;
...
<))
--
Standard 1,
-4
>
c:
0
u
...
<))
~
-6
Planar
W;
--0--
----*""-
----.0.--
----'0'-
----<>--
(5'"
20deg
40 deg
60deg
80 deg
Regions without geometrical
optics solution
-8
0.5
1.0
1.5
2.0
3.0
2.5
Relative refractive index m [-]
Fig. 8.15. Comparison of the diameter conversion factor of first-order refraction for a
standard and a plan ar receiver arrangement. The separation angle of the two receivers is
4deg for both systems (B=7deg, Ab =514.5nm, Standard: lf/,=±2deg, Planar:
lf/,=TiJ,±2deg)
the planar system is seldom used on its own. More typical is the combination of
the planar system with a standard system, known as the dual-mode system.
Therefore, the dual-mode system, described in the next section, generally uses
smaller off-axis angles than the three-detector, standard system.
By using different scattering angles for the two receivers of a planar phase
Doppler system angular regions can exist in which different scattering orders
dominate on each of the two different receivers. The conversion factors are then
a combination of e.g. refraction and reflection.
L1<P~;2) = /1;;2) dp = .fi 11: dp (~l- cos( V1 - %) - ~l- cos( V1 + %)
Ab
-.fi~l +m 2-.fi m~l- COS(V2 +%)
+.fi~1+m2 -.fim~1-cos(V2
(8.29)
-%))
As with the standard arrangement, the planar arrangement measures the velocity component parallel to the plane of the two beams. Therefore, a planar
phase Doppler system is only practical as a two-velocity component device in
combination with a standard phase Doppler system. An exclusively planar arrangement, for instance with three detectors at three elevation angles has not
been frequently implemented (Damaschke et al.1998), because the dual-mode
phase Doppler concept makes such configurations superfluous.
8.2 Single-Point Phase Doppler Systems
429
"'-s'"
"1
OJ
~ -180
:.a
~
OJ
..c:'"'"
iO-<
-360 ,-,-'~',.l........l-...L...-'---'----L----'Uo...-'---..l-...L...-'---'-'
o
100
200
Particle diameter dp [flml
0
100
200
Particle diameter dp [flml
Fig. 8.16a-d. Phase/diameter and phase difference/diameter relation calculated with gcometrical optics and Lorenz-Mie theory for a planar configura tion (Ab = 488 nm,
If/t = 31 deg, 1f/2 = 39 deg, 9, = 0 deg, m = 1.333, 19= 4.352 deg). a Phase difference for a
point-like detector, b Phase of detector 1, c Phase difference for a finite size detector,
d Phase of detector 2
Although the planar optical arrangement on its own is not wen adapted far
partide size and velo city measurements, it is wen suited for measuring the diameter of fibers or cylindrical partides aligned with the yaxis. A fiber aligned
with the yaxis scatters light only in the plane of the laser beams. In this case,
geometrical optics applied to spheres is also valid far cylinders and can be used
to determine the phase conversion factor. If the fiber is tilted, the scattered light
forms a cone and the cross-section of the fiber in the plane of the laser becomes
elliptical. This application has been studied in detail by Mignon et al. (1996).
They demonstrate that the measurement is insensitive to the tilt angle of the
cylinder away from the y axis up to angles of 5 deg to 10 deg, depending on the
exact configuration. Gouesbet and Grehan (1994) have presented a more rigorous treatment of the scattering characteristics of cylindrical partides in Gaussian beams.
If a second pair of laser beams for a second velo city component is added orthogonal to the planar system, then also the axial velocity of the cylindrical partides or fibers can be measured, as discussed by Schöne et al. (1995). For this
application, the fiber material must exhibit surface inhomogeneities to insure
that ligh t is detected from both beams at the receiver position.
430
8 Phase Doppler Systems
8.2.3 Dual-Mode Phase Doppler
The dual-mode phase Doppler is pictured in Fig. 8.17 and is a combination of a
standard and a planar phase Doppler optical arrangement, such that all receiving apertures can be housed in a single receiver unit and two velocity components can be measured.
A typical phase difference/diameter curve for such a system is presented in
Fig. 8.18, indicating that the planar system exhibits a much lower sensitivity to
size than the standard system. However, similar to the three-detector arrangeMea ured curvature
(standard system)
La er
g~ r-~~~~~_b:e:a~ms
Measured curvalure
(planar sy lern)
Fig. 8.17. Optical arrangement of a dual-mode phase Doppler system
_
Oll
e.>
360
~ncr-r""T""1"",:""""",-.-T,.,.,rr,...,..-.--r.,.-,rr"""'T""T-a--,rr"""''''''''''''''''''''T""I1..,,---r-,...,..,..-,:ii''!Il
:::!.
"$
~
270
c:
~
, e.>
s:
"0
'"
;:;
..c
Q..
180
90
200
Parlide diamlcr dp IlJml
Fig. 8.18. Phase difference/diameter curves for a dual-mode phase Doppler system calculated using Lorenz-Mie theory (symbols) and first-order refraction (lines) (e=7deg,
A" = 514.5 nm, Apt = 488 nm, m = 1.333, Ir = 1000 mm, Mask B)
8.2 Single-Point Phase Doppler Systems
431
ment discussed in section 8.2.1, the combination of the planar and the standard
arrangements can be used to remove any 2n: ambiguity from the size measurement. So me caution is necessary in the implementation, since the planar system
exhibits oscillations of the phase difference/diameter curve for very small partides. Thus, the lower size range, perhaps d p < 10 11m, must rely solelyon the
phase difference measurement from the two detectors of the standard phase
Doppler system. For the same reason, measured partide diameters with phase
differences near 360 deg with the planar system must be rejected or converted,
as shown in Fig. 8.19, because they may have arisen from small partides resulting in negative phase differences.
Furthermore, the measurement point scatter of the planar system can increase for a slightly misaligned system or poor signal conditions. In such a case
the measurements of small partides can reach the next phase difference period
of the standard system near LllPV{2 "" 100 deg, 200 deg in Fig. 8.19. This results in
improperly validated partide diameter measurements in equally spaced diameter dasses. Therefore the maximum planar phase in Fig. 8.19 has to be carefully
chosen for measuring small partides with a dual-mode system.
As shown in Fig. 8.17, the dual-mode arrangement effectively sees glare
points simultaneously on a meridian line and an equatorialline of the particle.
Deformations of the partide, for instance into an oblate or prolate shape, will result in large differences of curvature along the equatorialline and lead to significant differences in measured size between the standard and planar systems
(Doicu et al. 1997, Damaschke et al. 1998). Thus, a validation diagram, as illustrated in Fig. 8.20, will be quite sensitive to partide sphericity and can be imAccepta nce band
1I1aximum planar phase
0iJ
360
<J
:::.
B""S
'<l
E 270
<J
-.;
~
""2
'"t::
"0
-.;'" 180
~
t::
.,~
.=
"0
~
..c
"
90
c-
O
90
180
270
360
Phase d ifference pla nar sy lem LI<P~~~ Idegl
Fig. 8.19. Validation in the phase difference plane of a dual-mode phase Doppler system
(e=7deg, A" =514.5nm, Apl =488nm, m=1.333, J, =1000mm, MaskB)
432
8 Phase Doppler Systems
phcri..ily linc
.~60
dcg
TolcrdllCC b~nd
RcjCClcd
(c.g. non -s pherical mcasurcmcnls)
360 dcg
Fig. 8.20. Validation scheme for detecting non-sphericity using a dual-mode phase Doppler system
plemented in the processing software. This is one of the main advantages of the
dual-mode arrangement compared with a three-detector, standard system. AIthough this generally results in a lower validation percentage than a threedetector, standard system, the non-sphericity detection can be considered more
reliable.
The main flow direction of a dual-mode system is the y direction, in contrast
to the standard and planar configurations. The reason is that the dual-mode
system was designed to suppress the Gaussian beam effect (see section 8.3.1).
Large particles moving through their detection volume on the side opposite to
the receiver Iocation can generate signals from reflection only, although the
system is designed for dominant first-order refraction (see chapter 5, Fig. 5.22
and Fig. 8.26). A two-detector standard system or a three-detector standard
system with asymmetrie mask cannot recognize this Gaussian beam effect and
will measure wrong particle diameters. Sometimes this effect is also called the
trajectory effect because it is trajectory dependent. Iflarge particles move mainly
in the y direction, then the signal maximum is always dominated by first-order
refraction and, therefore, the measurements are more reIiable for the dual-mode
configuration. When the Gaussian beam effect is not expected e.g. for smaller
particles or when asymmetrie masks for recognition of the Gaussian beam are
implemented, the dual-mode system can also be used with a main flow in the
x direction. A complete analysis of the Gaussian beam effect is given in section
8.3.1.
The dual-mode phase Doppler arrangement can be implemented in a manner
similar to the standard phase Doppler system. Fig. 8.21 shows the cross-section
of a fiber-optic receiving probe and Fig. 8.22 illustrates the corresponding aperture plates. The detectors corresponding to the planar system are labeled Vj and
V2 since they measure the U 2 or v velo city component. The achievable size
ranges are determined by the size limit of the planar system and are not unlike
8.2 Single-Point Phase Doppler Systems
433
those for a three-detector, standard arrangement. Typical receiver mask dimensions are given in Table 8.4, e.g. for the Dantec Dynamics system.
The choice of scattering angle for the dual-mode receiving probe is more restrictive than for a three-detector, standard system. This is evident from the response curves shown in Fig. 8.15. To achieve sufficient size sensitivity of the planar system, it is necessary to restrict the off-axis angle to smaller values , e.g.
20 deg < ~r < 40 deg (for water in air and first-order refraction mode). The ratio
Measuremcnl
volume
\
I'ronl lens
Aperture
plate
4 Multimode fibers
Fig. 8.21. Fiber-optic receiving probe for a dual-mode phase Doppler system (adapted
from Dantee Dynamics (1999))
Notch corresponding to index pin
Fig. 8.22. Interchangeable aperture plates for the dual-mode phase Doppler probe shown
in Fig. 8.21
Table 8.4. Parameters of the aperture masks of the dual-mode phase Doppler system
(Dantee Dynamics)
ParameIer Imm]
MaskA
MaskB
Mask e
R
20.05
20.05
20.05
x"
x pf
7.0
5.5
2
10
10
10
Ypf
16
10
5
D"
13.5
D pf
8.5
12.75
6.5
3
7
.
..:
~
1
oslIaoo D ..
434
:::!:
8 Phase Doppler Systems
0.6
~
~
~
o
U
~
0.4
First-order refraction:
- - - - m = 0.75
- - - - m = 0.833
------- m = 1.132
- - 0 - - m = 1.192
--Reflection
m = 1.39
-1E---- m = 1.45
-----<r--
~
.9
~
~
o
u
'"
1lp. 0.2
""'o
<I)
.9
~
45
90
135
180
Off-axis angle of detector unit 1/1, [degJ
Fig. 8.23. Ra tio of the diameter conversion factors of the planar and the standard systems
of a dual-mode phase Doppler configuration for reflection and first-order refraction and
for different refractive indexes (mask B, 8=7deg, Ab=514.5nm, \fIu12=±2.35deg,
\fIV12 = (P, ± 1.2 deg)
of the diameter conversion factors between the planar and the standard system
as a function of the detector unit angle and for mask B is plotted in Fig. 8.23 for
different refractive indexes. In commercial systems the ratio is generally larger
thanO.2.
Not only does the sensitivity of the planar system drop at higher off-axis angles, but the non-linearities of the phase difference/diameter curves increase for
small particle sizes, as discussed for the planar system in the previous section.
Therefore, the phase difference of the planar system is generally only used to
detect the number of 2n jumps in the phase difference of the corresponding
standard measurement. The actual diameter estimation is made according to the
standard system because of the higher resolution and accuracy. Furthermore,
the mask design influences the sensitivity of the dual-mode system to detection
volume effects like the Gaussian beam effect and the slit effect, as discussed in
section 8.3.
The specific aperture configuration of the dual-mode system demands a
much more precise adjustment of the receiving optics, often considered by users
as a disadvantage of the system. However the resulting scatter of the measurement values in the validation map (e.g. Fig. 8.20) is easily recognized in preliminary "adjustment" measurements and can be eliminated. This greatly improves
the detection reliability of non -sphericity.
Adjustment of the dual-mode system can be made less sensitive to misalignment by affixing slit apertures only to the detectors of the standard system and
not to those of the plan ar system. Since signal detection is usually made using
the standard system detectors, there is no detrimental effects with this measure.
8.2
Single-Point Phase Doppler Systems
435
However, the increased detection volume of the planar system (without slit apertures) may lead to coineident signals from different particles at high particle
concentration levels.
If the sphericity validation discussed above is not implemented, Damaschke
et al. (2001) have shown that the dual-mode system can be used to evaluate the
volume of non-spherical droplets, oscillating in a prolate/oblate manner aligned
with the x axis. When oscillating, the curvatures of the meridian line and equatorialline change with opposite signs, but very systematically.
As the photographs of oscillating droplets in Fig. 8.24 illustrate, their shape
may change significantly even during passage through the measurement volurne. The signal shown to the right of the photograph in Fig. 8.24 corresponds to
the time-resolved phase difference within single burst signals, for a standard and
a planar detector pair. Such time-resolved phase difference information can be
achieved using the Hilbert transform, as outlined in section 6.4.3. Note that the
measured velocities on the two detectors are not uniform throughout the signal
but also not the same. Due to the droplet oscillation, the veloeities of each of the
incident and glare point pairs are modified from the bulk translation veloeity of
the particle. This leads to variations in the measured veloeity.
If the droplet oscillation during the burst signal is significant, several experimental points can be used to construct a diagram analog to Fig. 8.25 and an extrapolation through the points to the spherieity line can be used to estimate the
volume equivalent diameter of the oscillating droplet. With such a procedure the
validation rate of a dual-mode system can be significantly increased (Damaschke et al. 2001). Note that the standard system change is much more sensitive
OsLillating
dro plcts
u
.j
c
fr inges in
illuminal cd
~
:~
180
Pha e diffcrcn.:e of standard phase
Doppler system <P,,,
Phase differen.:e of planar phase
Doppler ystem .d<PVll
'Ö
~
..r:.
'"
0..
-- ................... ,...._.- ....__ .
..... ..... ....
.... - . . .,_ ............
Frequcn.:y of standard rc,civer U,
Frcquenq of standard rc,civer U,
43. J
L...L-'-L...J.....L...L...J......L..JL...L......L..JL...L....L-JL...L....L...I.....L.L..I.....L..L...J.....J....J...J.....J....J...J
o
5
10
Time 11).151
15
Fig. 8.24. Measured evolution of the phase difference and signal frequencies for an osciIlating droplet with a volume equivalent diameter of about 113 11m
436
8 Phase Doppler Systems
b
a
360
$'
:11
E
~;...
"E"
O~O
0
]"' 180
"'
;;;
0
360
(j
ofi\o
0
c
~
~
'5
110
.,"
'"
..c
~
o ~~~~~~"-"
180
Phase difference planar system L1lPpl [deg]
0
360
L~~~~~~
0
360
Phase difference planar system L1lP;~) [deg]
Fig. 8.25a,b. Measured phase differences for spheroidal drop lets of various aspect ratios
measured with a dual-mode phase Doppler system. a Distribution of measured diameter
processed with commercial software, b Phase difference evolution processed with Hilbert
trans form for different oscillation states of a droplet
for prolate forms than for oblate forms, again underlying the higher sphericity
sensitivity of the dual-mode system.
In section 8.3.3 further special phase Doppler configurations are presented
for detection and measurement of non-spherical, rough and inhomogeneous
particles.
8.2.4 Dual-Burst Technique
The dual-burst phase Doppler technique was first introduced by Onofri et al.
(1994), Onofri (1995) and Onofri et al. (1996). Although this technique has not
been developed commercially, it does exhibit some interesting features, which
allow additional particle properties other than the size to be estimated, in particular refractive index or absorption coefficient. Some initial remarks about the
dual-burst technique have been given in seetion 5.4.
The principles are best understood by realizing that each scattering order has
its own measurement and detection volumes. The measurement volume is defined by the particle position (center) at which the signal amplitude at the receiver exhibits an e- 2 decay from the point of maximum intensity. Thus, the
measurement volumes are the same size and shape as the illuminated volume,
despite the fact that they may be displaced and exhibit different absolute intensities. The displacement of each volume depends on particle size and on detector
position. Volumes of different scattering order can overlap and the detection
volume refers to that volume in which, for a given particle size, the sum of all
scattering order intensities results in a received signal amplitude exceeding the
detection threshold. The detection volume can, therefore, be larger or smaller
8.2 Single-Point Phase Doppler Systems
437
than the illuminated volume. The detection threshold may be based only on amplitude or, as with several newer processors, it may be sensitive to a given signalto-noise ratio.
For larger particles, the distance between the incident points of different
scattering orders increases and this corresponds to a larger separation of the respective measurement volumes. Two examples are shown in Fig. 8.26 for two
detector off-axis angles of r/J, = 30 deg and r/Jr = 90 deg and for the case that the
dominant order is first-order refraction and the less dominant order is reflection
with half the intensity of the dominant one. Because no elevation angle is considered, the measurement volumes are centered in the y-z plane and the displacement is only in the y and z directions. As seen from these examples, the
signal will depend on the trajectory of the particle and the receiver location. For
so me trajectories, two burst signals will be obtained, one from the dominant
scattering order and one from the less dominant scattering order.
- 0.4
e;
e;
.2
Cl
"-0.0
u
~
;:
'"
Q..
0.4
_ OA
E
E
D.S
0.0
0.5
1.0
Parlic!eposilion z, [mm)
Fig. 8.26a,b. Signal intensity distribution summed over reflection (less dominant order)
and fIrst-order refraction (dominant order) as a function of particle position for two different receiver positions (e=13.7deg, rw=lOOJ.l.m, lf/,=Odeg, m=1.8, d p =250J.l.m).
Two example particle trajectories are indicated with white arrows. a Receiver off-axis angle fjJ, = 30 deg. Trajectory (A) results in a dual-burst signal, trajectory (B) contains only
the dominant order, b Receiver off-axis angle fjJ, = 90 deg. Both trajectories result in dualburst signals with the same intensity ratio
438
8 Phase Doppler Systems
The relative intensities of the two measurement volumes will depend on the
scattering angle and on the imaginary part of the relative refractive index, since
this will affect the first-order refractive scattering. The separation of the volumes
is dependent on receiver position and particle size (time-shift technique). The
size of each volume will depend only on the width of the laser beam.
With proper positioning of the receiver and alignment of the main flow direction with the measurement volumes, two bursts may always be expected and
this is the working principle of the dual-burst technique. For determination of
the absorption coefficient (imaginary part of relative refractive index) the amplitude ratio between reflection and first-order refraction can be used, under the
assumption that the ratio is independent of particle trajectory.
Therefore, if the main flow direction is assumed to be in the y direction, as
shown in Fig. 8.26b, the receivers have to be located at rjJ r = 90 deg. Figure 8.27
illustrates that in this case, all particle trajectories in the y direction produce signals with the same intensity ratio between reflection and first-order refraction
because the detection volume displacement in the z direction is the same for reflection and first-order refraction. However, in Fig. 8.26a the two trajectories
parallel to the y axis result in different ratios between reflection and first-order
refraction and adetermination ofthe absorption coefficient is therefore dependent on particle trajectory. To overcome this problem, laser light sheets in the
plane of the laser beam instead of laser beams can used. For such an optical
configuration the trajectory dependence vanishes.
The two parts of the burst signal will become more distinct if the laser beam is
made narrower and the particles are larger, thus the ratio of particle size to
__
~
5r--r--~-.---r--~~---.--.-~---.--.-~---.--.-~---.--.--,
§.
§.
First order refraction
m = 1.1
m= 1.3
----- m = 1.5
c
0
OB
<lJ
f;::::::::~~~~~~
'"'
;;3
"
<Ei'"'
E
<lJ
0
___
-0-
- - Reflection
m = 1.9
~~-----=l
'ü
..::
'H
<lJ
0
U
90
Receiver off-axis angle !/J, [degJ
180
Fig. 8.27. Displacement of the center of the measurement volume in the z direction per
micrometer particle radius as a function of the receiver off-axis angle for reflection and
first-order refraction (e= 13.7 deg, 1jI, = 0 deg)
8.2 Single-Point Phase Doppler Systems
439
beam waist radius should be preferably large to exploit the dual-burst technique.
A more rigorous treatment of how to compute the measurement volume positions will be given below in section 8.3.
A typical optical arrangement of a dual-burst system is shown in Fig. 8.28,
which is a three-detector, standard phase Doppler system, but with perpendicular polarization and with a different main flow direction. Like in the dual-mode
configurations, both receivers will observe the same scattering order at the same
time and a phase difference calculation for particle diameter measurement is
possible. Generally, the dual-burst technique will therefore also require a second
velo city component measurement, since the main flow direction is aligned with
the y and not the x axis.
A typical signal pair obtained from a dual-burst arrangement is shown in Fig.
8.29, in which also the phase difference is shown. The phase difference can be
computed either using the Hilbert transform, as discussed in section 6.4.3 or
using model-based signal processing, as outlined in section 6.5.2.3. From this
example it is evident that a burst signal separation is preferable. If this is not the
case, i.e. the bursts overlap strongly, then the phase difference is no longer distinct for each burst and a size determination becomes non-unique. This effect is
known as the Gaussian beam effect and will be also discussed in section 8.3.
Given that the two burst signals are distinct, size and relative refractive information are contained in the following measurement quantities
• Phase difference of signals from the dominant scattering order
• Phase difference of signals from the less dominant scattering order
• Time shifts of signals of each scattering order from each detector
Since there is redundancy in the size measurement, in principle it is also possible to determine the relative refractive index of the particle. The achievable accuracy, although not high, is certainly sufficient to distinguish between different
materials, phases or components.
Laser
beams
direCliony
Fig. 8.28. Optical arrangement for the dual-burst technique
440
I:l"
"...
8 Phase Doppler Systems
0
~
=
L1<P~) -950 deg
'M/'oI~.......-~W"'lHI"IHII- - - - - -
'6 -180
~
= -230 deg- 2 x 360 deg
- - - -
- - -
'"
~-36~~-i-L~~~~-L-L~~~~~-L~~4LO-L~~L-~-L-L-L6~0-L-U
Time
t
[Ils]
Fig. 8.29. Typical dual-burst signals and the computed phase difference (Ab = 514.5 nm,
d b =50J..lm, j'h=IMHz, e=13.7deg, m=1.32, d p =150J..lm, v p =6ms- 1 , q),=65deg,
1jI, = ±2 deg)
8.2.4.7 Refractive Index Measurements
From the detectors U1 ' U2 and U3 the phase differences LllP\Y, LllPg), LllPW, and
LllPW can be obtained, which are linearly related to the particle size using the
phase conversion factors F8), Fi-}!, FS) and FN) (the diameter conversion factors
are ß(]J) = (Fi~)tl), where the factors can be computed using Eqs. (8.11) and
(8.12) for reflection and refraction respectively. From the reflected bursts, the
particle diameter can be determined using Eqs. (8.16) to (8.18). Knowing the
particle diameter, the phase differences of the refracted parts are only functions
of the relative refractive index.
(2)(
dP ß 12
m ) --
A n,(2)
LJ'l-'12 -
2nn 27t
d ß(2)(m) = LllP(2)
p
13
13
(8.30)
(8.31)
Because the ratio of the diameter conversion factors ßW I ß\j) is, to a first approximation, not a function of refractive index, Eqs. (8.3) and (8.4) (Onofri et al.
1996), the number of 2n jumps can be calculated similar to Eq. (8.18).
The inverse of the approximation in Eq. (8.12) yields an expression for the
relative refractive index, given by (!fIr = !fIl = -!fI2)
m'"
-J2 ~cos% cos!flr cos9r + 1 + ~2w+ cos% cos If/r cos9r-1
2
1-w
(8.32)
8.2 Single-Point Phase Doppler Systems
441
where
W
=
2( 2n d p)2
Ab
o/z sin 2 If/r
(l+COSo/zCOSlf/r COS9r)
2
Sin
2
(L1cJJ~~) -2nn 2n )
(8.33 )
Knowing the procedure to extract the relative refractive index and diameter
from the measured phase differences, a compromise must be found for the optical parameters according to the following conditions:
• The intensity ratio between reflected and refracted signals should be dose to
unity to aid signal processing.
• The centers of the measurement volumes should be aligned with the main
flow direction.
• The phase difference sensitivity to relative refractive index must be maximized.
• The size and refractive index dynamic range should be matched to the measurement problem.
The difference between reflected and refracted light intensity can be diminished using appropriate off-axis angles. For instance at 65 deg for perpendicular
polarized light or 90 deg for parallel polarized light (water in air m =1.333), the
intensity of the reflection and first-order refraction in the scattering function is
equal, as can be seen in Fig. 4.17. The receiver separation should be in the main
flow direction. In this case the signals from all partides will contain reflected
and refracted light with the same amplitude ratio.
The phase sensitivitywith respect to the relative refractive index
2n
2-d p
Ab
sin If/ r sin o/z (2 -
mv)
y,
v = .J2~1 +cos If/r cos9r costJi
(8.34)
v(l+m 2 -mv)'
is an increasing function of the product dp If/ r o/z and a decreasing function of
the off-axis angle 9r and the relative refractive index. As an example, for
9r = 60 deg, tJi = 5 deg, If/r = 3.69 deg, m =1.33, Ab = 514.5 nm and a partide diameter of 100 11m, L1cJJg) varies by 2.1 deg for a change in relative refractive index from m = 1.33 to m = 1.34.
The refractive index and the partide diameter can also be estimated by using
the time shift between signals of like scattering order on each of the detectors.
For this, the detectors must again be positioned so that both reflective and refractive scattering orders are present in the signal with similar amplitudes and
sufficiently separated in time. For the dual-burst arrangement in Fig. 8.28 the
partide diameter can be estimated by the time shift between the reflected and
refracted signal parts for each detector. Therefore, the number of 2n jumps can
determined and the third receiver U 3 is no longer necessary.
In contrast to the dual-burst system in Fig. 8.28 the main flow direction could
be aligned in the x direction as in a standard phase Doppler system, Fig. 8.6. If
the elevation angles are chosen large enough, then the reflection and refraction
parts of the signal are separated asymmetrically relative to the center position of
442
8 Phase Doppler Systems
First-order refraction
First-orde refraction
Reflection
Reflection
Receiver U,
o
-20
Receiver U,
-20
20
Time t [fis]
o
20
Time t [fis]
Fig. 8.30. Refraction and reflection signal contributions for detectors U, and Uz • Burst
displacement Llt12 =16.3 fls (Oll in water m = 1.06, d p = 30 flill, Ab = 512 nm, t9 = 14 deg
1;" = 10 flm, If/, = ±1O deg, ~, = 11 deg)
the particle. Typical signals for such a system are shown in Fig. 8.30 using oil in
water as an example, where the partide is larger than the beam waist. In this
case the signals can be processed using the time-shift technique.
For signals in which the reflective and refractive bursts are weH separated, the
time shift of the corresponding maxima is suitable for determination of the partide diameter and the relative refractive index. The partide diameter can be determined from the time shift of the reflective signal part Lltgl according to Eqs.
(5.258) and (5.259). A second time shift is available for refractive signal portions
Lltg l and the refractive index is given by using Eq. (5.258) and an approximations of Eqs. (5.260) (see section 9.2).
m=
~ ~cos IfIr cos (jJr COS'% + 1 + ~w+ cos IfIr cos(jJr cos,%-1
V 2-'---'--'----=-'-----------'----:.....:...--'-'----
2-w
(8.35)
with
•
_ d2
w-2
p
Sin
2
2
IfIr
(vxLlt:~l) (l+COslflrcos~rcos'%)
(8.36)
The structure of these equations is similar to the Eqs. (8.32) and (8.33), because the time-shift dependencies are, to a first approximation, almost proportional to the phase shift dependencies (see section 9.2). The sensitivity of the refractive index measurement is determined by the sensitivity of the time shift to
the refractive index change
(8.37)
8.2 Single-Point Phase Doppler Systems
443
The displacement of the measurement volumes, or the time-shift dependency,
is relatively small compared with the sensitivity of the phase difference from Eq.
(8.34). For tPr =60deg, o/z = 2.5 deg, IfIr =±20deg, m=1.3 and d p =100/lm the
displacement varies by less than l/lm for a change in relative refractive index
from m = 1.3 to m = 1.4. Therefore, the determination of the relative refractive
index by the time-shift technique is practical only for large changes in refractive
index, very small beam diameters and special receiver configurations. The time
shift is, however, always useful as a method to determine the number of 2n
jumps in the phase difference with only two detectors.
Both techniques have some limitations in particle size, which have yet to be
thoroughly investigated. For smaller particles the two bursts in each signal begin
to merge to form an asymmetric signal, which is no longer possible to analyze
correctly. Furthermore, the linearity of the phase difference/diameter relation is
disturbed by the interaction of the different scattering modes. To overcome this
problem a second set of detectors using the same receiving optics can be used
together with 45 deg polarized beams laser as illustrated in Fig. 8.31.
When the receiver probe is located at an angle where reflection and firstorder refraction have the same intensity for the perpendicular polarization
component and first-order refraction dominates for the parallel polarization
component, e.g. tPr = 65 ... 75 deg for relative refractive index of m = 1.3 ... 1.5,
the dual-burst technique can be used for larger particles with sufficient burst
separation, Fig. 8.32.
For smaller particles the phase difference from the perpendicularly polarized
light is disturbed by the superposition of the different scattering orders. The
parallel polarization component generates a pure refracted signal, where the
phase difference is linearly related to the particle diameter, Fig. 8.33. For this
case the refractive index information cannot be processed but a diameter measurement is still possible. Note that for sm aller particles the diameter measureReOeclion + first order refraction
Fir I-order
refraction only
z
polarized light
PoJarizalion
pre erving fibers
Fig. 8.31. Dual-burst configuration for combined diameter measurement of small partides and diameter and refractive index measurements oflarge partides.
444
8 Phase Doppler Systems
Para llel polarizalion
Pcrpcndicular polarizalion
,;-(F
-.i_rs
,- . I.
-o,r,
d,cr,r_e,fr,a"_·Iy-io.,.n....,--r-i-r"T"'T"'1rT"'T""O (Reßecl ion and firsl-order rcfraci ion)
'~~:::=~' ~~l
~E~::::J
öö360 ~~~~~~~;=~;=~;=~~
'"
Phas e d iffercncc
""$ '"
.d (/)~'
'<;]
'-'
'~
<::
'"...
~
=90.8 dcg
o
.d(/)\:' = -228.6 dcg
'.......-oH'l~ll- - - - - - - - - - - - .
'6
~
t'"
Phase differencc
36~O~0~~~1~0~O~~~O-L~~~IO~Ou-~~2~OO~~~ILO~
O-L~~0-L~~-IOLO~~-LJ200
Pa rlide posilion
y, lflrnl
Pa rlide posilion
y, lflrnl
Fig. 8.32. Single burst signals for parallel polarization and dual-burst signals for perpendicular polariza tion of the same large particle moving through the measurement volume
Parallel polariza lion
(Firsl·ordcr rcfraCli on o nly)
PcrpcndicuJH pola ri za lion
(Rcfleclion and firsl-o rdcr rcfraclion)
"u<::
~
.."=
200
Parl ide posilion
Y, lflrnl
Fig. 8.33. Single burst signals for parallel polarization and burst signals containing firstorder refraction and reflection for perpendicular polariza tion of the same small particle
8.2 Single-Point Phase Doppler Systems
445
ment is slightly influenced by the refractive index. Furthermore, the sensitivity
of the refractive index determination, Eq. (8.34) reduces with particle size, which
also results in a high er uncertainty for smaller particles.
8.2.4.2 Absorption Coefficient Measurements
The signal amplitude of reflected light is virtually unaffected by the absorption
coefficient, whereas the signal amplitude of first-order refraction decreases with
higher absorption (see section 4.1.3.2). The scattered light intensity from refraction can be approximated by an exponential function of the particle diameter
and absorption coefficient ßp (Beer-Lambert law)
I~1x = 16~~ax exp(- ßpi)
(8.38)
where n:~ax is the intensity for ßp = 0 and 1 is the optical path of the refracted
rays through the particle, i.e. 1= dp cose, for first-order refraction. The optical
path length is a function of the specific optical arrangement and a linear function of particle size. The absorption coefficient is related to the imaginary part of
the refractive index through
Im{m} =
ß~~b
(8.39)
Eq. (8.38) cannot be used directly since the quantity n:~ax is not known. However the ratio of the maximum reflective signal amplitude to the maximum refractive signal amplitude for ßp = 0, I~~x / Iö~~ax' can be predicted. If
(8.40)
then
ß
p
=_~[ln(I~~J-Bl
1
I~~
(8.41)
which yields the absorption coefficient as a function of themeasured amplitude
ratio - refractive to reflective Ii,;,L / I~~x. In Fig. 8.34 the amplitude of the modulated signal is plotted for particles with different absorption coefficients. Not
only is the refracted signal influenced by the absorption coefficient, but also the
amplitude of the reflected signal, which causes uncertainties in the measurement.
This technique clearly assumes that the particle trajectories are weIl aligned
with the location of the measurement volumes, see Fig. 8.26. Furthermore, the
apertures of the receivers have to chosen carefuIly, such that the modulation
depth of the signal is not influenced by the particle diameter (see section 5.1.4).
For certain solutions, for example ink in water, the absorption coefficient can be
directly related to concentration. For high concentrations, however, the ampli-
446
8 Phase Doppler Systems
- - m= 1.32
m = 1.32 + j 10 5
m = 1.32 + j 10-4
m = 1.32 + j 4.6x10-4
m
= 1.32 + j 10-
3
,,
"
.,'
":'"
/ /
.","
, .. - .........
.....
OL-~~~~~~_~-L_~~~_~-L_L--L~_~~
-200
o
__~-L~
Particle position Yp [11 m]
200
Fig. 8.34. Signal amplitude of the modulated part of dual-burst signals for particles with
different absorption coefficients. The recalculated absorption coefficients from the ideal
signals are: Im{11!.l = 1.95 x 10-5 ,1.65 X 10-4,5.59 X 10-4, L08x 10-3 (parallel polarization,
Ab = 514.5 nm, d b = 100 11m, e= 13.7 deg, d p = 150 11m, (Pr = 65 deg, lfI, = ±2 deg)
tude of the refractive signals decreases too dramatically and the technique no
longer functions. Another limiting factor is the optical resonances in the particle, which change dramatically the intensity ratio between reflection and firstorder refraction, see section 8.4.1. Small deviations from the spherical particle
shape or inhomogeneous inclusions disturb these resonances. Generally, the estimation of the absorption coefficient improves for larger particles. Further details of this technique have been developed by Onofri et al. (1998).
8.2.5 Extended Phase Doppler Technique
The extended phase Doppler technique was first introduced by Durst and N aqwi
(1990), Naqwi et al. (1990) and Pitcher et al. (1990), suggesting its use to measure
the refractive index of the particle. The optical arrangement is pictured in Fig.
8.35, in which two phase Doppler receiving units are positioned at two different
off-axis angles, l/J A and l/JB"
The basic idea of the extended phase Doppler technique is easily understood
by expressing the phase difference measured at each of the two receiver units as
a function of the geometrical parameters and the relative refractive index and as
a linear function of the particle diameter.
(8.42)
The ratio of the measured phase differences will therefore be a function of
relative refractive index alone if the system parameters are known.
8.2 Single-Point Phase Doppler Systems
447
Receiver
proue B
Transrniller proue
x
Fig. 8.35. Optical arrangement of an extended phase Doppler system
.dt:/J(N)
-A--f(m)
.dt:/J(N) -
(8.43)
B
As an example, Naqwi et al. (1991) gives the ratio for firs t-order refraction.
.dt:/J~)
.d t:/J~)
sin If/A k B
sin If/B k A
(I+m -m.jk;)
(I+m -m.JC)
2
(8.29)
2
with
(8.44)
where the detectors are assumed to be symmetric about the y-z plane at angles
If/ A = 1f/1A = -If/ 2A and If/ B = 1f/ 1B = -1f/2B for receiver units A and B respectively.
Brenn and Durst (1995) solved this equation for the refractive index, yielding
(8.45)
(8.46)
This equations yields real solutions for non-vanishing denominators and
positive square root arguments, thus leading to the validation criterion
(8.47)
Using these equations, the value of the relative refractive index can be determined for every pair of phase shifts detected by the two receiving units.
The resolution and accuracy with which the extended phase Doppler system
can determine the relative refractive index will depend on the accuracy with
which the geometrical parameters of the system are known, on the accuracy of
448
8 Phase Doppler Systems
the individual phase difference measurements, LllP A and LllP B , and on the linearity of the phase difference/diameter curves in the diameter range of interest.
Volkholz et al. (1998) have considered the first effect on its own and suggest a
fitted correlation in the following form
erm '" ±[ O.l42(m -1.2)2 + 0.023] (95% confidence)
(8.48)
For example, at a relative refractive index of m = 1.34, the measurement uncertainty would amount to erm '" ±0.026.
The uncertainty in m due to the phase difference measurements depends also
on particle diameter and is given byVolkholz et al. (1998) as
er~~
erm,M'=+
ddeg (5.4(m-1.2)2+ 0.5) (95%confidence)
(8.49)
p
where er ~<P is the uncertainty of the phase difference measurement itself. Fig.
8.36 illustrates this quantity for example parameter values (er ~<P = 4 deg,
m=1.34).
Even without considering the non-linearities in the phase difference/diameter
relations, Eqs. (8.48) and (8.49) indicate that the expected errors in m with the
extended phase Doppler technique will be substantial for typical liquids and
furthermore, will become intolerable for small particles. Thus, the technique in
this form is more suited to differentiating between particles of large refractive
index differences in a multi-phase system.
At small particle diameters the additional problem of non-linearities lead to
multiple solutions of d p and m. One method of overcoming this problem has
,
1.0
....
0
t:
v
><
v 0.8
"0
.9
v
>
'BcO
~
0.6
v
~
0.4
0.2
40
60
80
Particle diameter dp [flm]
Fig. 8.36. Uncertainty of relative refractive index due to phase difference errors
(a~(/j=4deg,
m=1.34,
(OA=30deg, (OB=60deg, e=3.38deg,
\f/,=3.36deg,
a, =5.5 deg)
8.2 Single-Point Phase Doppler Systems
449
been proposed by Volkholz et al. (1998), in which up to 4 detectors at four elevation angles in a planar configuration are used. They used the so-called joint
phase match method for determining the correct relative refractive index for a
one-component spray.
Especially for the optical configuration of the extended phase Doppler the
time shift between detector signals at off-axis angles l[J A and l[J B may be quite
large and an expression for deducing the refractive index from the time shifts of
the signals can be derived. The refractive index is again given by Eq. (8.45) by
substituting A(/> with At
(8.50)
and
ga =coslfl a costPa tan~ +sinlfla'
gb = COSlflb COStPb tan~+sinlflb
(8.51)
tan~-sinlfla'
hb =coslfl b COStPb tan%-sinlflb
(8.52)
ha =coslfla costPa
Thus, two techniques are available to measure the refractive index of the partide. The time-shift approach is more appropriate for large partides, whereas
the phase difference technique is more suited to smaller partides. In any case,
the accuracy of the method decreases for smaller partides, since the measurable
influence of the partide medium becomes less. One general disadvantage of the
extended phase Doppler technique is that two receiving units are required. They
must be extremely weIl aligned onto the same detection volume, which can only
be achieved using a well-defined test partide, for instance, a stream of monodispersed partides or a glass bead on a rotating wheel.
8.2.6 Reference Phase Doppler Technique
All phase Doppler systems considered up to now have been based on receiving
scattered light from two illuminating beams and their interference on the detector surface. However, also the reference-beam arrangement, introduced in
section 5.3.3, can be used for determining particle size, as shown by Strunck et
al. (1994), Strunck and Dopheide (1996), Borys et al. (1999) and Borys et al.
(2000b). One of these reference phase Doppler arrangements is pictured in Fig.
8.37.
Each detector sees a virtual interference pattern, for instance detector R] sees
the pattern lying along beam 2. The length of the interference pattern along the
beam is determined by the aperture of the receiving optics in front of each detector. For identical optics, the virtual interference patterns are symmetric. Depending on the z co ordinate of the particle trajectory through the virtual interference pattern, the maxima of the modulated signal component are shifted in
time because of the spatial displacement according to Eq. (5.180). The phase
difference between the signals will be a function of particle diameter. This refer-
450
8 Phase Doppler Systems
x
Beam2
Receiver I
(J) "
el=====---------=~_E_:===_~~'
~ ,""
Fig. 8.37. Beam and receiver arrangement in a reference phase Doppler system (Borys et
al. 1999)
ence phase Doppler technique is analyzed in section 5.3.3 in terms of geometrical optics, considering each scattering order in turn.
The phase difference I diameter relation for reflection is given in Eq. (5.243)
as
2n
d
P
Lll/J(I)
=2-d
12
A p sin(e/)-n=2n/2
LIx -n
(8.53)
b
The expression for phase difference in a standard phase Doppler arrangement
(Eq. (8.2» will give the same result with exception of the additional phase shift
ofn.
For refraction the phase difference diameter relation can be expressed as (Eq.
(5.247»
(8.54)
The additional phase shift of n again arises due to the nl 2 phase difference in
the far field of a focused beam (rw1 »[Rb) and vanishes for a homogeneous reference beam. For a standard phase Doppler system, the phase difference for the
conditions (9r = 0, lfI r = ±~) would, according to Eq. (8.3), be given by
Lll/J~;L = 2 2n d p [(m -1) -~1 + m 2 - 2m cos~ ]
Ab
(8.55)
Comparing Eqs. (8.55) with (8.54) reveals that the reference phase Doppler exhibits a significantly high er size resolution (Strunck et al. 1994). This difference
is illustrated in Fig. 8.38, which shows a comparison of the phase difference/diameter relations for a planar and a reference phase Doppler system.
Despite the much larger elevation angle of the planar phase Doppler system,
the reference phase Doppler is many times more sensitive. This intro duces a 2 n
ambiguity, which must be resolved using additional detectors, as in standard
phase Doppler systems.
For transparent particles with d p » A, the refractive contribution to the
scattered light dominates in the forward direction. However additional disturbances from reflection and diffraction can be expected. This leads to deviations
8.2 Single-Point Phase Doppler Systems
bC
451
O"~".-rrTT"~rr"~""rr"~,,no,,rr,,,,,,~rrrrTT"
=23~"
"1
"
i:l
-90
::!
~
:.a
~
-&
-180
·270
21
22
23
24
25
Particle diameter dp [11m]
Fig. 8.38. Phase difference in refraction mode for a reference and a planar phase Doppler
system as a function of particle diameter (m = 1.328, Ab = 852 nm, e = 18.9 deg, planar
system 1fJ, = ±13 deg)
from the linear relation between particle diameter and signal phase difference.
In Fig. 8.38 computations using FLMT have been compared with the result given
by Eq. (8.54) and these confirm the existence of such deviations. These computations have been performed for a point detector and some smoothing of the irregularities can be expected when the scattered light is integrated over a finite
detector.
8.2.6.1 Phase Difference for Very Small Particles
Phase Doppler measurements in the sub-micron size range exhibit errors arising
from the low signal intensity, a lower gradient between phase difference and
particle size and oscillations in this relation. Figure 8.39a compares the characteristic curve for a reference phase Doppler system, a planar phase Doppler system and a standard system. The reference phase Doppler exhibits a considerably
different behavior in the Rayleigh range d p < 51 Ab in that the phase difference
converges to 1t rather than to zero. This is due to the far-field phase effect present with a focused laser beam. Furthermore, for the range Ab 15 ~ d p ~ 3Ab, an
almost linear behavior is observed. Since the amplitude of the alternating part of
the scattered light power contains the product of the reference-beam field
strength with the field strength of the scattered wave, also the decrease of received AC signal amplitude with sm aller particle diameters is significantly lower
for the reference phase Doppler system (PAC - d~ instead of d~). This is illustrated in Fig. 8.39b, again comparing the three phase Doppler systems, in this
case in terms of scattered intensity. Thus, an extension of the measurement
range into the sub-micron range is relatively straightforward with the reference
452
8 Phase Doppler Systems
Reference system
- - Planar system
- - - - - Standard system
-180
o
2
3
4
5
Partide diameter dp [!lm]
Partide diameter dp [!lm]
Fig. 8.39a,b. Diameter and signal power relations for a standard phase Doppler system, a
planar phase Doppler system and a reference phase Doppler system (m = 1.328,
Ab = 852 nm, 8= 9 deg). a Phase difference/diameter relation (!f/"St = ±15 deg,
f/J,.,sr = 30 deg, !f/,.,Pl = ±11.5 deg), b Signal power/diameter relation (!f/,.,St = !f/,'pl = ±20 deg,
f/J,.,sr = 30 deg, NA St = NA pl = 0.05, NA Ref = 7.1 X 10-4)
phase Doppler, provided a low noise laser source is used, for instance a laser diode or Nd:YAG laser.
8.2.6.2 Example Measuremenfs
In Pig. 8.40 particles from a seeding generator (Dantee Dynarnics Type 55118)
have been sized simultaneously in coincidence mode by a planar and a reference
phase Doppler system. The reference system was triggered by the planar system
to insure coincidence. The correlation of the results is high, however the planar
system did not allow measurements of smaller sizes. The scatter observed in the
measured distribution is partially due to the oscillations in the exact relation
between diameter and phase difference, which have not been considered in the
data processing.
Despite the long wavelength of the laser diode (Ab = 852 nm) and the low
power in the measurement volume (30 mW), measurements could be performed also on very small particles, Pig. 8.41. These particles were generated
using an aerosol generator based on the Sinclair-La Mer principle as described
in section 13.2.1 (Palas, Type MAGE), operated under various conditions (Horton et al. 1991). An improvement could be expected for shorter wavelengths,
higher laser power and lower noise in the laser source.
If, in addition to the phase difference and signal frequency, also the time delay between the signals at detectors R1 and R2 is measured, then the position of
the particle trajectory in the direction can be deterrnined (Strunck et al. 1993,
Borys et al. 1999). This is particularly interesting in flow regions where a high
velocity gradient exists, for example in a boundary layer.
8.2 Single-Point Phase Doppler Systems
453
2
Parlide diameier by planar syslem dp lJ.1ml
Fig. 8.40. Correla tion between measured particle size using a planar and a reference phase
Doppler system (m = 1.328, A.b = 852 nm, = 9 deg, Planar system: 1fJ, = ±1l.5 deg)
e
a
-
'" 600
C
;:J
0
u
~OO
200
OWU~~~~~~~LU~LU~~
o
2
.l
Parl ide diameier d, lJ.1ml
2
~
Parlidc diamclcr d, lfl ml
Fig. 8.41. Measured size distribution of droplets from an aerosol generator using the reference phase Doppler technique (A.b = 852 nm, e= 9 deg, DEHS in air). a Bubbier temperature 180°C, mean diameter l.05Ilm, standard deviation 0.14Ilm, b Bubbler temperature 130 0 C, me an diameter 0.65Ilm, standard deviation 0.161lm
454
8 Phase Doppler Systems
8.3 Further Design Considerations for Phase Doppler Systems
8.3.1 Influence ofthe Gaussian Beam
Especially the discussion concerning the dual-burst phase Doppler system revealed the fact that at least one separate measurement volume exists for every
scattering order and for every detector position. In most conventional phase
Doppler configurations, the scattering angles are chosen such that the intensity
of all these volumes except one is insignificant. In the case of the dual-burst
system, two measurement volumes were used, so that redundant size information could be obtained, hence also the refractive index.
While the size of each measurement volume is the same for all particle sizes
and scattering orders, their displacement from the position of the illuminated
volume will depend on both parameters. For large particle-to-beam width ratios
therefore, the different volumes are well separated in space and if the trajectory
of the particle is known, the correct interpretation of the signal e.g. reflection or
refraction, is straightforward. This is not generally the case for a three-detector,
standard phase Doppler system or for a dual-mode system. With these systems,
a particle may pass through a measurement volume that was not intended for
use.
The situation has been discussed in section 5.1.3.1 and can be illustrated as
shown in Fig. 8.42. The example depicted in this figure is for adetector off-axis
angle, 1> r = 60 deg, and for m > 1; the first -order refractive scattering is assumed
to be dominant over the reflective scattering. For large particles however, the
measurement volumes for reflection and first-order refraction are displaced significantly; for reflection in the opposite direction as the receiver location and for
first-order refraction in the direction towards the receiver. The detection volume
will favor first-order refraction at 1> r = 60 deg (see Fig. 4.17), nevertheless, for
y
Particle motion is
normal to the page
Rellection
mc~surcment
volume
Illuminatcd
mcasuremcnt volulllc
Dircclion to dctcctor
Fig. 8.42. Schematic illustration of the origins of the Gaussian beam effect. Particle motion is normal to the page
8.3 Further Design Considerations for Phase Doppler Systems
455
some partide trajectories, here partide trajectory B, only reflective scattered
light will be detected. The resulting size measurement, based falsely on firstorder refraction, will be incorrect. Note that such an effect is only possible when
the partide size is of the order or larger than the laser beam width and furthermore, the effect will arise for any shaped beam, even if it is non-Gaussian.
The example in Fig. 8.42 was prepared assuming m > 1; however, a similar
effect occurs for m < 1. For m < 1 the incident points for reflection and refraction are doser together, thus the effect only becomes significant for even larger
particles (Grehan et al., 1994). Note further, that similar effects can also occur
for higher scattering orders, but reflective and first-order refraction are the most
common because of forward scattering advantages.
This effect was originally recognized by Saffman (1986) and was later studied
by numerous authors (Grehan et al. 1991, Sankar and Bachalo 1991, Grehan et
al. 1992, 1993, Gouesbet and Grehan 1994b, Albrecht et al. 1996). It has been
called the trajectory effect or the Gaussian beam defect/effect.
There have been numerous strategies proposed to avoid or correct for this
effect. One suggestion is to monitor also the amplitude of the signal (Sankar et
al. 1992). A large partide detected using the wrong scattering mode due to its
trajectory will yield low signal amplitude. A size. dependent amplitude threshold
could eliminate such mi stakes (Bachalo 1991).
Aizu et al. (1993) proposed using a planar phase Doppler system, with the
partides moving along the y axis. In this way, contributions from both the desired scattering order and the unwanted scattering order will be received with a
time displacement between them. Since the desired scattering order will yield
much higher signal amplitude, errors could be avoided by determining the
phase difference only around the maximum signal amplitude. A similar suggestion was put forward by Xu and Tropea (1994) using a standard, two-velocity
component phase Doppler system. This procedure is implemented in the dualmode phase Doppler system (see section 8.2.3).
A third method of recognizing improper size measurements, implemented in
all three-or-more detector systems, is the validation criterion inherent in the
three-detector, standard or dual-mode arrangement. The phase difference/diameter response curves for different scattering orders exhibit quite different dependencies for the two receiver arrangements. Signals arising from unwanted scattering orders alone would then lie outside of the tolerance bands
shown in Fig. 8.20. For the three-detector, standard and the dual-mode systems
the phase difference/diameter relation can be chosen by the masks.
The phase difference of the dominating order, e.g. refraction, starts from the
origin of the phase difference plane and increases for increasing partide size, as
illustrated in Fig. 8.43. When the unwanted scattering order has an opposite sign
in the phase difference Idiameter relation, e.g. reflection, the phase difference
starts also at the origin or at (360 deg, 360 deg) and decreases for increasing
partide diameter. If the aperture mask and, therefore, the three detectors are
non-symmetric in elevation angle, the ratio of the phase factors of the detector
pairs Fl~N) I Fit) will generally be a non-integer. If this is the case (best value:
Fl~N) I F1iN ) = n + 0.5, n = I, 2, ... ) the system can identify the Gaussian beam ef-
456
8 Phase Doppler Systems
a
360 dcg b
'"E
'"E
~
'0'"
~
'-
1:lc:
8c:
<>
<.I
'"o
~
~
~
't5
~
"~
'"'"
'"
..c
0..
L-______
Odcg
~~
_______ L_ _ _ _ _ _ _ __ .
Phase diffcrcncc 01' system I
,
c
..
..c::
0..
0 deg
Pha se difference of system 1
J60dcg d
"' ~--------~-----'--?T--~~
<=
'"
~
360 deg
'"E
a'"
'-
'"o
'-0'"
1:l
c:
1:lc:
~
't5
S
~
<J
....
.."'"
"C
.'"
tL-______
<>
..c::
O"L-____- L__
~
____~~_L_ _ _ _ _ _~
~~
______
_ L _ _ _ _ _ _ _ _~
Odeg
Phase difference of system 1
0 dcg
Phase dincrcncc 01" syslem I
Measurements
Sphericity line
Increasing particle diameter
~
-,:Dominant order:
___ +-__
"I!o
Unwanted order:
Fig. 8.43a-d. Identifieation and non-identifieation of the Gaussian beam effeet using different aperture masks resulting in different ratios of the phase eonversion faetors. a The
ratio of phase eonversion faetors is 3 and the Gaussian beam effeet eannot be deteeted,
b The ratio of the phase eonversion faetors is 2.5 and measurements from unwanted
seattering ean be rejeeted. e Measurements with high seatter ean result in wrong validation, d If the sign of the phase eonversion faetors of the dominant and the unwanted
seattering order is identieal, the Gaussian beam effeet eannot be deteeted
feet, beeause a measurement influeneed by refleetion leaves the toleranee band,
as illustrated in Fig. 8.43b.
If a symmetrieal arrangement of apertures is used (for instance when small
particles are being measured) and the ratio of the phase faetors is an integer
value or when the phase differenee/diameter relations have the same sign (e.g.
refleetion and second-order refraetion), then the Gaussian beam effect ean no
longer be identified using the three-deteetor arrangement (Fig. 8.43a,d). For instanee, the Dantee Dynarnies mask A (see Fig. 8.10) is symmetrie and is therefore not reeommended in situations where the Gaussian beam effeet ean potentially oeeur.
However, even for asymmetrie arrangements, an error-free result is not always possible, espeeially when the phase difference exhibits large seatter (Fig.
8.43e). For the dual-mode arrangement the same eonsiderations are valid with
the additional remark, that the seatter of the measurement for the planar system
is generallyhigher than for three-detector, standard systems (see seetion 8.2.3).
8.3 Further Design Considerations for Phase Doppler Systems
457
Still another proposal for avoiding this effect has been made by Qiu and Hsu
(1999), in which they show that for certain detector positions, an additional pair
of detectors can be used to eliminate the effect by taking the ratio of the respective phase differences. This technique is based on the fact that the amplitude ratio of the two scattering orders is the main parameter which influences the
measurement in case of a Gaussian beam effect. With an additional phase difference measurement this amplitude ratio can be estimated and the particle diameter corrected. Some remarks about this technique are presented in the next
section.
A final approach to avoid sizing errors due to the Gaussian beam effect is the
correct layout of the system to insure that the ratio between the particle size and
the beam width does not exceed a certain limit, i.e. by dimensioning the measurement volume large enough. Generally ratios of 5:1 (measurement volume to
particle diameter) has been proposed by various authors: however; this does not
consider the specific system or the tolerable error. More recently Araneo et al.
(2000) have analyzed the situation in detail, both experimentally and theoretically, which will be discussed in the following sections.
8.3.7.7 Signal structure
The basis of the analysis can be understood by examining the diagrams in Fig.
8.44, prepared for two arbitrary particle diameters, d pa and d pb = 3d pa • In each
diagram, two measurement volumes are pictured, one for the dominant order
and one for the unwanted scattering order. The detection volume is that volume
within which the sum of all scattering order intensities exceeds some specified
threshold, e.g. amplitude or SNR (section 5.1.6).
The spatially dependent parameter A (ud) shown in this figure is the ratio between scattered intensity from the unwanted scattering order, subscript (u), to
that from the dominant order, subscript (d). The factor A (ud) changes throughout space and must remain below some threshold to insure a proper size measurement. In the example shown in Fig. 8.44, a value of A (ud) < 1 is always exceeded in the detection volume for the small particle (d p = d pa ), whereas for the
large particle (d pb = 3d pa), trajectories exist for which A (ud) > 1.
In the following analysis, particle trajectories for which measurement errors
occur are to be found. The criteria used are the phase error that occurs and the
amplitude of the modulating part of the signal, which must exceed some minimum detection level.
For this analysis the form of the signal generated at the detector is given by a
dual-burst expression
whereby A is the signal amplitude of the dominating order, t is time, tb is the
burst width, OJ D is the Doppler or burst frequency, t(d) and t(u) are the size de-
458
8 Phase Doppler Systems
a
:J
,;
d l • =d ..
~
Mcasurcmcnl volumc of
dominant scallcring o rder
><
.§
~
'"
:Q
....
~
Mcasurcmenl vo lume of
unwdnlcd sUlllcring order
b
Pari idc posl ion z , la.u.]
~
.-"'.
Mcasurcmcnt vo lumc of
dom inant scallcring o rder
'"
><
<=
~~~~~==:i
.2
-;;;
0
Co.
<J
:g
;::
'"
0..
Measurcmcnl volumc of
unw·" nt cd scallering order
Partide pos lio n z r la.u.1
Fig. 8.44a,b. Schematic representation of the total scattered intensity (thin lines) the
measurement volumes (bold lines), the detection volume (gray regions) and the amplitude ratio A (url) (dashed lines) of the unwanted to dominant scattering order intensity for
two different particle diameters. a Small particle diameter d p = d pa , b Larger particle diameter d p =d pb =3dpa
pendent time shifts of the two bursts from each scattering order, <p(d) and q;(u)
are the size dependent signal phases from the two scattering orders and A (ud) is
the maximum signal amplitude ratio of the unwanted to dominant scattering
order intensity for the individual signal (A(ud) = A~'::') == const < 1 for plane wave
case). In general, dominant scattering means that the amplitude of the dominant
order is ten times larger than the amplitudes of allother scattering orders for the
plane wave case (A~'::') < 0.1). Angular regions where this is the case are discussed
in section 8.1 and illustrated in Figs. 8.3 and 8.4. An exarnple signal is shown in
Fig.8.45.
A phase Doppler system would determine from such a signal using e.g. a Fourier transform, the signal phase at the frequency (j) == (j) D
n,(du) (
'Y r
)
(j)
~
t
sin <p( d) + A (ud) sm <p(U)
= (j)D = arc.an cos<P(d) + A (ud) cos<P (u )
(8.57)
8.3 Further Design Considerations for Phase Doppler Systems
Normalized
amplitudeA
tb
1
I
>
e
459
I
1
I
\
1\
~
n~~"",
A
o
~
.... ~
nwanted .\1.1J,. I'siina1 jart /
Dominant
~,.\{~/
\l
)' <I>(u>
-1
o
Timet
Fig. 8.45. A signal arising from a particle of diameter comparable to the measurement
volume diameter and passing through the volume such that both the dominant and less
dominant measurement volumes are traversed
given sufficient periods in the signal (OJ D > 30 / tb ). It is important to note that
the detection volume displacement and thus, the time shift of the signal, always
exist. The Fourier transform of Eq. (8.56) gives a time-shift dependent spectrum
(section 6.5.2.1). Only at the burst frequency OJ = OJ D is this dependency cancelled and this result corresponds to the results from Qui and Hsu (1999). By
using the diameter conversion factors between phase and partide diameter of
the dominating (ß<t> , e.g. Eq. (8.3) for refraction) and unwanted scattering order
(ß';;>, e.g. Eq. (8.2) for reflection) for a two-detector standard phase Doppler
system one obtains for the phase at one receiver
ßt ) A Sin(d ßt)
CO{d/f[)+A(Ud)CO{dp ßt)
sin(d
l/J(du) (OJ
r
p
+
(ud)
p
= OJ ) == arctan--7----7-------..:,----';D
(8.58)
only the two parameters d p and A (ud) are unknown.
By using a second independent phase Doppler measurement of the same partide it is possible to determine the partide diameter and the maximum amplitude ratio between unwanted to dominant scattering orders
from the two
equations. This is the technique of Qiu and Hsu (1999) to eliminate the Gaussian
beam effect with the third detector of a three-detector system. In this case the
21t ambiguity can be overcome only with a fourth detector (Qiu et al. 2000).
Furthermore, this can be used for determination of the amplitude ratio between
two scattering orders and for the absorption coefficient measurement with the
dual-burst technique, section 8.2.4.2, even though the two bursts cannot be
separated for small partides.
If the linear relation between partide diameter d p and phase is substituted for
each scattering order, l/J~d) = ß<t>d p /2 and l/J~u) = ß);>d p /2, the absolute phase
A(ud)
460
8 Phase Doppler Systems
error for one receiver of a standard phase Doppler measurement can be expressed as
A(ud)
Sin( d
p
ß~) ~ P~»)
arctan-----'--::----~""7"""
l+A(ud) co{ d p P;)
~ P~»)
(8.59)
The phase error O"t/> disappears for certain particle sizes, known as nodal points.
21tn
dp =
IP;) _P~)I '
n = 0, 1, 2, ...
(8.60)
Furthermore, the error depends strongly on the amplitude ratio A (ud) . A useful quantity is the critical amplitude ratio A~ud) at wh ich an acceptable error of
magnitude (j ([Je (0::; (j ([Je < 1t /2) occurs in the measurement
(8.61)
The diameter conversion factors ß,;/) and ß';) are generally so large, that this
critical amplitude ratio varies strongly with particle diameter. For this reason it
is advantageous to define a minimum acceptable critical amplitude ratio, which
is particle size independent
min( A~ud) (d p ») = sin (j ([Je
(8.62)
If in any burst signal the maximum signal amplitude ratio between unwanted
and dominant reaches this limit of A~ud), the measured phase could deviate by
maximally (j ([Je from the expected result (/J~d) •
8.3.1.2 Warst case particle position
Equation (8.62) yields, for a given phase error, detector position and particle
size, an amplitude ratio of unwanted to dominant scattering order intensity,
which must not be exceeded to avoid errors. For plane waves this ratio would
never be exceeded (A~ud) <A~~». For inhomogeneous beams however, trajectories will always exist for which A (ud) is larger than A~ud) (see Figs. 8.26 and 8.44).
Of particular interest is to find the particle position rpc at which the ratio
A(ud) = A~ud) is reached and also at which the intensity exhibits a maximum. It
can be shown that this position always lies on the line connecting the centers of
the two measurement volumes, as shown in Fig. 8.46.
The connecting line between centers g/ in parametric form is given by
8.3 Further Design Considerations for Phase Doppler Systems
"
"
~":-
;\
(~n)
ConncLlinglinc bctwccn
measurement volumc centers g,
l\laximulll inlcnsily
(or 11(0')= 11:"<0
< ;\!~tl)
r.,= r,.
.2
.--'--
A(lid) >
461
.--
.-- ~
A ~roll"l
Partide posi tion
top
[a.u.1
r;:.. Particle positions which yield the scattered intensity larger than the detection level of 0.4
'CI and a phase error smaller than arcsin( 0.1)
l!'!lI Particlc positions which yield thc scattered intcnsity larger than the dctcction level of 0.4
~ and a phase error larger than arcsin(O.I)
I© IParticle position which yield the scattered intensity not reaches the detection level
Fig. 8.46. Relation between the measurement volume centers and the position of maximum signal intensityat which a given amplitude ratio is exceeded
exI]
e
I
=[e
yl
ezl
=
(d)
(u)
r ACmax -
rACmax
(d)
I r ACmax
(u)
-
rACmax
I
(8.63)
,
where the positions of maximum intensity and the centers of the measurement
volumes d~~a.x for scattering orders N = u and N = d can be determined by Eq.
(5.100). The parameter p in Eq. (8.63) is the position parameter along the line
connecting the measurement volume centers. The ratio of unwanted to dominating scattering order intensity along the connection line can be written from
Eqs. (5.99) as,
A(ud)(g
I
(p») = A(ud)
exp(_l_[_(xU'U) cosel _
pw
2
O,lr
12
ZU,u)
rmb
_ (XU,U) COS el
0,2r
/2
O,lr
sin el)2
/2
_ yU,U)2
+ ZU,u)
sin el)2
O,2r
/2
+ (XU,d)
COSe/ _
O,lr
/2
ZU,d)
O,lr
O,lr
_ yU,U)2
0,2r
(8.64)
sin e/)2
+ yU,d)2
/2
O,lr
+ (XU,d)
COSe/ + ZU,d) sin e/)2 + yU,d)2
0,2r
/2
0,2r
/2
0,2r
J)
whereby the laser beam radius rmb and the scattering function in the vicinity of
the measurement volume can be considered constant and equal for both incident beams. The absolute positions of the incident points rci:b~) are functions of
462
8 Phase Doppler Systems
'p
the parameter p, the particle radius and the relative position of the incident
points on the particle surfaee r~:,N), Eq, (5.4) and e.g. Eqs. (5.200) and (5.202) for
refleetion and Eqs. (5.213), (5.215) and (5.216) for first-order refraction, and
therefore on the system configuration
O,br
p+
eI
=
rU,N)
+
Po
eU,N)
br
,
p
[ ~~~:] =[:::] p+[~t~:::j+[:~i:] 'p
ZU,N)
e
O,br
Z(d)
zl
(8.65)
eU,N)
AC,max
Z,bT
This equation allows the posItIon along the connecting line p to be reformulated as a funetion of amplitude ratios, by inverting Eq. (8.64) with respeet
to p. The seleeted particle position f op = ec/ P+ Po depends on particle diameter
d p , the seleeted amplitude ratio A(ud) along the connecting line, the ratio for
plane waves A~~) and the geometrie eonfiguration of the phase Doppler system.
p(dp,m,A
(ud)
1
dp
2
A(Ud)
(ud)
_
1
'mb
,A pw ,lf/r,cfJr,e)-- [ -C 2 --2C 3 +2-ln(;,i)
2C I
2
dp
A pw
(8.66)
with
CI
= Cßxl eos 2 "; + Cze zl sin 2 <% + (D xezl + D ze xl )sin <% cos<% + Cye yl
C2 =E x
eos2el+2Fsineleosel+E
sin 2el
/2
/2
/2
z
/2 +E Y
C3 = Cx X(d)
eos 2 el
+ (D x Z(d)
+ Dz X(d)
)sin el
eoSel C
AC max
/2
AC max
AC max
/2
/2 z
(d)
• 2 el
+ Z ACmax SIn
12
C
(d)
(8.67)
(8.68)
(8.69)
+ yY ACmax
and
C =
eU,d)
x
x,Ir
C =
eU,d)
y
Z
E
x
y
eU,U) _ eU,u)
x,Ir
x,2r
+ eU,d)
_ eU,U) _ eU,U)
+ eU,d)
_ eU,U) _ eU,U)
y,2r
2,2r
y,lr
y,2r
zJr
2,2r
= _eU,d)
+ eU,d) + eU,U) _
x,Ir
x,2r
x,Ir
D =
E
eU,d)
2,lr
Z
x
x,2r
y,lr
C =
D
+ eU,d) _
_eU,d)
2,lr
+ eU,d) + eU,U)
2,2r
eU,U)
x,2r
_ eU,U)
2,1r
(8.70)
2,2r
=(e U,d»)2 +(e U,d»)2 _(e U,U»)2 _(e U ,U»)2
x,Ir
=
x,2r
x,Ir
x,2r
(e U'd»)2 +(e U,d»)2 _(e U'U»)2 _(e U'U»)2
y,lr
y,2r
y,lr
y,2r
=(e U,d»)2 +(e U,d»)2 _(e U,U»)2 _(e U,U»)2
E
2,lr
Z
F = eU,U) eU,U)
x,Ir
2,lr
2,2r
2,lr
2,2r
_ e(;'U) eU,U) _ eU,d) eU,d)
x,2r
2,2r
x,Ir
2,lr
+ eU,d) eU,d)
x,2r
2,2r
For A(ud) in Eq. (8.66), the eritieal amplitude ratio A~ud) from Eqs. (8.61) or
(8.62) ean be substituted. Thus, an analytie expression results whieh gives the
8.3 Further Design Considerations for Phase Doppler Systems
463
position r pe = elPe + Po at which a prescribed error occurs while the signal exhibits a maximum intensity
(8.71)
The constants are found from the geometry of the phase Doppler system.
Along the connecting line between detection volume centers, all amplitude
ratios between -00 and +00 occur, arising from the superposition of two displaced Gaussian fields. For infinitely sensitive detectors, a particle position can
therefore always be found for which an error will occur. Accordingly, some further criterion must be prescribed on which the selection of error free particle
sizes can be made.
An error can only occur when the scattered light intensity, being the sum of
e.g. reflection and refraction, exceeds the detection level, i.e. the particle trajectory passes through the detection volume. Using the critical particle position
r pe (d p) in Eq. (8.65), the scattering intensity of the dominating scattering order
[ Id)(d
r
_ ) _ lid)
rO
p,rop-rpe -
d~2
d po
exp
1_[(
8/ _
8/)2
2
XO,lrCOS/2
ZO,lr Slll
( __
(i,d)
(i,d)
rmb
•
/2
(i,d)2
+YO,lr
+ (X(i,d)
COS8/ + Z(i,d) sin 8/)2 + y(i,d)2
0,2r
/2
0.2r
/2
0,2r
J)
(8.72)
and the unwanted order
_ ) _ [lu)
[ lu) (d
r
p,rop - r pe - rO
d~2
d po
exp(
1_[(
2
__
rmb
(i,u)
8/ _
(i,u)
X O,lr COS /2
ZO,lr
• 8/)2
(i,u)2
Sin
12
+ YO,lr
+ (X(i,U)
COS81 + Z(i,u) sin 8/)2 + y(i,U)2
0,2r
/2
0,2r
/2
0,2r
J)
(8.73)
can be computed from Eq. (5.99). The intensities of the individual orders increase with the square of particle size in the geometrical optics range. The
maximum intensity in Eqs. (8.72) and (8.73)
(8.74)
can be expressed with respect to the maxinmm intensity of a reference particle
diameter d po for plane waves.
To determine the ratio of the scattering order intensities for plane waves A1~)
used in Eqs. (8.64) and (8.71)
(8.75)
464
8 Phase Doppler Systems
for arbitrary particle diameters, the reference particle size d po , which is definitely large enough to be treated using geometrical optics (e.g. d po = 1000 j..lm),
can also be considered.
Therefore, the scattering intensities I~~) and I~g) in Eqs. (8.72) and (8.73) are
determined for the case of a plane wave and are independent of the Gaussian
beam effect. If the total scattered intensity exceeds the detection amplitude
(8.76)
then erroneous measurements can be expected. The detection level I d of the
detectors can be chosen such that particles with a diameter d pd will just be detected, e.g. d pd =2 j..lm. The detection level can then be determined with respect
to the reference particle diameter.
e.g. I d
=
(2 j..lm)2 (d)
2
(U))
I ro + I ro
(8.77)
(1000 j..lm)
The numerical solution of Eq. (8.76) for d p yields the maximum error-free
particle size for the chosen detector positions. This analysis therefore provides
the particle size at which first errors due to the Gaussian beam effect can be expected. Note that the error was assumed for one receiver. For the case of a twodetector standard system this error can be expected on both receivers, thus the
phase difference error is double the error on one receiver.
8.3.1.3 Example
The above analysis was carried through assuming two arbitrary scattering orders interacting in the ratio A(ud) to yield the detected intensity. Indeed, the sum
of all scattering orders must be considered for a more exact solution; however in
most practical circumstances, off-axis and elevation angles are chosen for the
detectors at which higher order scattering is negligibly sm all. Furthermore, the
relatively simple expressions given above would no longer be possible.
Typical experimental conditions, given in Table 8.5, can be used in the theoretical analysis given above to determine the particle diameter at which the
Gaussian beam effect can lead to a phase difference error for a given optical arrangement. One critical input parameter is the minimum detectable particle diameter d pd • The maximum particle diameter in the investigated process is assumed to be 100 j..lm. The fuH dynamic range of the processor is used, without
saluration of the electronics at this diameter. If the phase Doppler system has a
maximum dynamic range of about 40:1 (1600:1 in intensity) then the smallest
measurable particle diameter is about 2 j..lm to 3 j..lm, accounting for some deviation from the value given by the manufacturer.
In Fig. 8.47, the particle diameter at which a phase difference error of 10 deg
occurs, has been computed as a function of detector position for each of the laser beam waist diameters, 77 flm and 290 flm, using a smaHest detectable particle diameter of 3 flm and the parameters from Table 8.5. Additionally the region
of dominant first-order refraction is indicated.
8.3 Further Design Considerations for Phase Doppler Systems
465
Table 8.5. Example configurations of a phase Doppler system for estimating the error-free
measurement range.
Quantity
Symbol
11.1 deg, 5.72 deg
514.5 nm
90 deg
Full in tersection angle of the laser beams
Wavelength
Polarization angle to be am plane
Beam waist radius
Relative refractive index
Reference particle size for ratio determination
Smallest detectable particle diameter
Maximum allowable phase difference error
Maximum phase error per detector
Off-axis angle
77 11m, 290 11m
1.334
m
d po
100 11m
d pd
0<k
0<t>c
9,
Eleva tion angle
Dominating scattering order
Unwanted scattering order
1jI,
(d)
(u)
a
Configura tion
/2
311 m
10 deg
5 deg
30 deg
< 2.5 deg
First -order refraction (1)
Reflection (0)
b
20
o ~~~~~==~~~
o
30
60
90
Off-ald angle 1/I, ldegl
0
30
60
90
Off-alds angle 1/I, ldegl
Fig. 8.47a,b. Particle diameter (in 11m) at which a phase difference error of 10 deg is expected (system parameters in Table 8.5). a Laser beam waist diameter of 77 11m, b Laser
beam waist diameter of 290 11m
In the off-axis range of f/Jr = 70 ... 77 deg and the elevation range of
= 0 ... 5 deg, first-order refraction completely dominates reflection (Brewster
angle), leading to the maximum measurable particle diameters. For this angle,
other scattering orders than reflection influence the particle diameter measurement, as can be seen from Figs. 4.31 and 4.32. For the position of the incident
point of the unwanted scattering order, the respective higher scattering order
lfI r
466
8 Phase Doppler Systems
must be used. Measurements with the detectors in the black shaded areas are
not possible (A~ud) < 0.174 = sin(lOdeg», since even for plane waves the critical
amplitude ratio is exceeded A(ud) > A~,:!).
The predictions in Fig. 8.47 show that the maximum error-free particle diameter is 331lm and 981lm for the beam waist diameters of 771lm and 290llill respectively for a receiver off-axis angle of ifJ r = 30 deg and small elevation angles.
The above example demonstrates that this analysis can reduce the rather
complicated theoretical aspects of the Gaussian beam effect to a simple limiting
diameter which must not be exceeded during the measurements or a minimum
beam diameter for a given particle diameter range. Possibilities of increasing
this limiting diameter lie in the choice of optical configuration parameters. More
details about such computations and comparisons with measurement results
for verification of the analysis can be found in Damaschke et al. (2000).
8.3.2 Slit Effect
Most commercial phase Doppler systems use a slit aperture in front of the detector or receiving fibers. The slit is orientated, such that the measurement volurne is truncated in the z direction over the length of the projected slit width, L s •
The reason for employing slit apertures in the first place is to achieve welldefined detection volume dimensions (see section 12.2.3). Since all further statistics about size and flux distributions must be based on a reference volume or
area, the slit helps to define the detection volume dimension in the z direction.
Pinholes can also be used instead of slits, then the detection volume shape becomes that of a cylinder (see sections 12.2.3 and 14.2.1).
A typical arrangement is pictured in Fig. 8.48, using an off-axis angle of
ifJr = 60 deg as an example. In this case, first-order refraction is expected to be
dominant.
Independent of particle size, trajectories near the boundaries of the projected
slit aperture exist in which either reflection is suppressed (particle A) or firstDetectiol1 volume
(projection of the slit aper ture)
,,
.. ,
.. .
,
refraction
Fig. 8.48. Illustration of the slit effect. Particle trajectories are into the page
Receiving
probe
8.3 Further Design Considerations for Phase Doppler Systems
467
order refraction is suppressed (particle B), because the respective scattered light
is outside of the projected slit region. Thus, the slit aperture results in a virtual
detection volume, which exhibits an inhomogeneous ratio of dominant to unwanted scattering order intensity, similar to the Gaussian beam effect arising
from a shaped beam.
The slit effect, first identified and quantified by Durst et al. (1994), becomes
important when the slit aperture blocks the glare points of dominant order. In
contrast to the Gaussian beam effect, which depends on incident point positions,
the slit-effect is dependent on the glare point positions on the particle surface.
Due to the finite aperture size and diffraction effects, this explanation of the slit
effect using geometrical optics is not precise, nevertheless, sizing errors can occur because light from the wrong scattering order may be dominating. Such errors can be avoided using the same techniques used to avoid the Gaussian beam
effect, for instance, a three-detector or dual-mode arrangement with a noninteger phase factor ratio.
Further remarks about the slit effect can be found in Durst et al. (1994), Xu
and Tropea (1994) and Sommerfeld and Tropea (1999). How the slit aperture
dimension is incorporated into the data processing is discussed in section 12.2.
8.3.3 Non-Spherical and Inhomogeneous Particles
Already in section 8.2.3.1 the special case of oscillating droplets aligned with the
x axis of a dual-mode phase Doppler system has been examined. In this section
the more general situation of non-spherical or inhomogeneous particles
their measurement with the phase Doppler technique will be discussed.
maschke et al. (1999) introduced the classification of particles shown in
8.49, distinguishing between spherical and non-spherical and homogeneous
and
DaFig.
and
Parlides
Rotationally symmetrie particles
Iiomogcneous
phcri.:al parcidcs
A)
ß) L:lycrcd
[ nhomogencous
D) Prolat.
E) Cylindcr.
disk
ol>lal
C) Eva poral ing
G) uspcnsions
F) General
Ii) Al mosl
I) Agglomera tes
dcformations
sphcrical
Limils
-+
Fig. 8.49. Classification of particles (adapted from Damaschke et al. (1998»
J)Very
irreguJar
468
8 Phase Doppler Systems
Fig. 8.50. Schematic representation of steps involved in particle measurement
inhomogeneous particles. Indeed, they also recognized that the problem of size
measurement is manifold, comprising the four steps shown schematically in Fig.
8.50; mathematical description of the particle, predictability of light scattering
from the particle, strategy for solving the inverse problem and a practical implementation in an instrument. For certain idealized particles, some of these
steps may be simple; however, in general an exact description or measurement
of the particle characteristics will be virtually impossible.
The basic principles of the signal generation presented in section 5.1 are valid
for both spherical and non-spherical particles; however, any optical technique
can only deliver information about the particle at the points of light interaction
- incident and glare points. The phase Doppler technique yields local curvature
information around these points, and some information about the light path in
the particle between incident and glare points may be available. However, a
complete determination of shape and structure of a more irregular and inhomogeneous particle becomes increasingly difficult because of the limited number of
sampie points on the surface of the particle. A rather extreme example of single
particle analysis based on multiple glare points is the 72 detector DA WN-A instrument introduced by Wyatt et al. (1988). Moreover, the inverse problem, i.e.
deducing unique particle characteristics from the multiple measurements also
becomes increasingly complex with added detectors.
The entire problem takes on added degrees of complexity due to the stochastic processes involved: orientation of the particle, surface roughness, inclusions,
ete. For these reasons the outlook for employing the phase Doppler technique as
a single particle sizing instrument for non-spherical or inhomogeneous particles
is bleak. More encouraging is the possibility of deducing statistical statements
about an ensemble of measured particles.
Small deviations of particle shape from the spherical form, small inhomogeneities or surface roughness lead to a broadening of the measured diameter dis-
8.3 Further Design Considerations for Phase Doppler Systems
469
tribution. Manasse et el. (1994) and Mitschke et al. (1998) experimentally demonstrate this broadening for inhomogeneous particles, e.g. milk suspensions. A
deconvolution of the measured size distribution with a known distribution from
homogeneous droplets is used as a correction procedure. Further details are
given in section 12.3.3. Göbel (1998) found a similar behavior for rough particles
and also used a deconvolution algorithm in the data processing. In both instances, information about single particles is no longer available.
Another approach for optically absorbent liquid droplets is to use incident
beams of high er wavelengths. Manasse et al.(1993), Manasse et al. (1994) and
Mitschke et al. (1998) have all demonstrated that by using wavelengths in the
near infrared range, the attenuation of refracted beams can be greatly reduced,
leading to a significant improvement in measurement results. In particular, the
measured size distribution becomes narrower.
Rheims et al. (1998) and Rheims et al. (1999) have attempted to preserve the
single particle feature of the phase Doppler technique for particles with roughness or light inhomogeneities. The three detectors of a standard phase Doppler
instrument were replaced by a CCD line array in the ljI r direction. Each CCD
pixel acts as aseparate detector and the far-field interference pattern can be
sampled directly. Small perturbations on the particle surface lead to deviations
of the interference fringe spacing from the otherwise linear change with pixel
number (elevation angle). A linear regression of the phase deviations lead to estimates of local change of curvature on the surface of the particle. The same
authors have proposed using a second CCD line array aligned along the off-axis
angle at an elevation angle of ljI r = Odeg. The spatial intensity modulation on
this array, arising from the scattering lobes, can lead to estimates of further partide characteristics. A se co nd incident laser beam is used only to provide the
partide velo city. These techniques are, however, presently limited by the rather
low readout rates of available CCD line arrays.
J1urther experimental investigations of irregularly shaped particles have been
performed by Naqwi (1996), and Naqwi and Fandrey (1997). They demonstrate
that the phase Doppler technique used to measure a stream of 'monodispersed'
irregular partides yields a peak in the size distribution at the correct mean diameter. The broadening of the distribution could, to some extent, be reconstructed.
A further method of measuring irregular partides is through direct imaging.
An example of such a technique is the shadow Doppler velocimeter, introduced
by Hardalupas et al. (1993, 1994) and discussed in detail in section 9.4.
If more that one partide is present at once in the detection volume of a phase
Doppler system, multiple scattering can occur. The response of a phase Doppler
system to multiple scattering has been studied theoretically and experimentally
by Doicu et al. (1998) and Bech and Leder (1999). Both the size of the individual
partides and of the agglomerates could be deduced, depending on the exact position of the partides. For small secondary partides, the measured size distribution was broadened in a mann er similar to that for rough partides.
Sultan et al. (2000) examined the influence of secondary light scattering outside of the detection volume on the measured size distribution. Secondary scattering was introduced experimentally by positioning an auxiliary spray between
470
8 Phase Doppler Systems
the transmitting optics and the measurement volume or between the measurement volume and the receiving optics. Such secondary scatter does influence the
measured size distribution, generally leading to an under-representation of
small particles. This is because the scattered light intensity dirninishes and falls
below the detection level for small particles fits. A deconvolution procedure was
used by the authors to correct for this unwanted influence.
8.4 Multi-Dimensional Sizing Techniques
8.4.1 Interferometric Particle Imaging (IPI)
A further technique for sizing spherical particles, which is still in its infancy and
goes by various names (PMSI - Plan ar Mie scattering interferometry, Planar interferometric imaging (PlI), Mie scattering imaging, PPIA - Planar particle image analysis, ILIDS - Interferometric light imaging for droplet sizing), is based
on scattering and imaging from a single laser beam. This technique will be deno ted Interferometric Particle Imaging (IPI).
The origins ofIPI technique can be found in König et al. (1986), who focused
a single laser beam onto a stream of monodispersed droplets and measured the
resulting fringe pattern in the far field. They recognized already the potential for
highly accurate size measurements and applied the technique to measure droplet evaporation. Ragucci et al. (1990) also examined the case of scattering from a
single droplet using a Lorenz-Mie calculation to find the oscillation behavior of
the scattered intensity in the far field. The extension of the technique to a multidimensional method using an illuminating laser light sheet is attributed to
Glover et al. (1995), who examined sparse injection sprays in an optical internal
combustion engine. Glover et al. (1995) also discuss the possibility of combining
the technique with a PIV system for two-component velo city measurements.
The principle of the technique can be understood using geometrical optics.
Considering a homogeneous spherical particle, a scattering angle can be found
for which two scattering orders, e.g. reflective (N = 0) and refractive (N = 1) are
of approximately equal intensity, for example f), "" 65 deg for water in air and
Foc uscd
I
Illumi nal ing
laser bcam
Imaging
oplics
/
ZI
Image planes
Fig. 8.51. The IPI technique showing both an in -focus image and an out -of-focus image
8.4 Multi-Dimensional Sizing Techniques
471
perpendicular polarization. This situation is depicted in Fig. 8.5l.
An in-focus image of the particle (right-most image in Fig. 8.51) will consist
of only two glare points, whose projected separation will be directly related to
the particle size. In principle this represents one possible mode of recording and
processing (Hess 1998); however, the demands on the image resolution are high
and indeed no distinct advantages over direct particle imaging, for instance with
back-lighting are obvious. Furthermore, the glare point distance does not
change linearly with particle diameter, because of optical resonances inside the
particle (Schaller 2000). If, however, the particle is imaged out of focus, interference fringes arising from the two scattered rays appear. The shape of the defocused image of each glare point depends only on the shape of the aperture,
whereas the size of the defocused images depends on the degree of defocussing.
As the degree of defocus increases, the two glare points merge into one single
image with interference fringes. The dislocation of the two defocused images can
only be detected if the magnification and resolution of the recording media, e.g.
CCD camera, is high enough.
For particle sizing, the angular spacing of the interference fringes for a detector placed at a scattering angle of iJ r is to be computed as a function of particle size (van de Hulst 1957 and Roth et al. 1991). The situation is pictured in Fig.
8.52 for reflection and first-order refraction. The path-Iength difference between
a reflected ray and a refracted ray through the particle and to the detector can be
deduced by comparing each of the individual ray paths to a hypothetical ray
from the source to the detector passing through the center of the particle, and
then taking their difference (see also section 4.1.1.2 and Eqs. (4.36) and (4.37».
Ineidcnl ray
N=2
Mcdium
Rcfcrcncc rdY
Refr~Cled
[n "idenl ray
N
I
Fig. 8.52. Ray paths for IPI
N ~ 2
rdY
472
8 Phase Doppler Systems
The complementary angles rare used instead of the incident angle e~N), the
reflecting angle (frl) and the angle of refraction e~N) . The relations between these
angles are
(8.78)
The reflected ray differs in path length from the reference ray by
Z(1) _z(r) = AZ(l) = -2rp sin r(1)
,
(8.79)
and the refracted ray by
Z(2) _z(r)
= AZ(2) = 2r p
(m sin ,,(2)
- sin ,,(2»)
t ,
(8.80)
and thus
AZ(l2) = Z(l) _Z(2) = d (sin r(2) - m sin ,,(2)
P
t
I
-
sin ,,(1»)
r
(8.81)
The receiver angle 7J r is related to the local scattering angles given in Fig. 8.52
through
2r(l)
i
= 2(r(2)
t
,,(2») = iJ r
(8.82)
I
Furthermore, Eq. (8.82) leads to
. 7J
m S l l l r-
sin r(l) = sin ~ ,
,
msin ,,~2)
2
_
sin ,,~2) =
2
cos ,,~2)
(8.83)
. 7J
r
mSlnCOST(2)
=
,
2
(8.84)
~1+m2-2mcos~r
The final expression for the path-length difference can be expressed as
AZ(12) =dp[sin
~r _~m2 +1-2mcos ~r )
(8.85)
Changes of path length equal to Ab correspond to the next interference fringe
and can be related to the fringe spacing Atp
dAZ(12)
Ab
~"" Atp(12)
(8.86)
or
_1
[
2,1
iJ
Atp(12) = __
b
cos-r +
dp
2
. iJ r
m Slll2
~m2 +1-2mcos ~r
J
(8.87)
8.4 Multi-Dimensional Sizing Techniques
473
Thus, the angular frequency of the interference fringes is inversely proportional to the particle size d p as already expected from Figs. 4.15 and 4.16. For
relative refractive indexes smaller than 1 the sign of the sum in the brackets and
the m in front of the eosine change (Maeda et al. 2000).
2..1,
.dip(12)
=_b
dp
[
iJ
m cos-r _
2
J-
msin-r
iJ2
~m2 +1-2mcos ~r
1
(8.88)
Fig. 8.53 illustrates the dependencies expressed in Eqs. (8.87) and (8.88).
Physically, the interference fringes correspond to the oscillating intensity
lobes apparent in the scattering diagrams computed using the Lorenz-Mie theory, for instance in Figs. 4.29 to 4.32. Anders (1994) has shown that Eq. (8.87)
agrees very weH with Lorenz-Mie computations over an scattering angle range
iJ r > 10 deg in forward scatter, i.e. beyond regions influenced by diffraction.
Massoli et al. (1999) have also presented Lorenz-Mie calculations of the angular
frequency of fringes. Schaller (2000) has demonstrated that optical resonances
influence the glare point distance as discussed later in this section.
An approximate relation for the angular fringe spacing, valid for iJ r '" 30 deg,
was given in the original work of König et al. (1986), but Anders (1994) demonstrates that this relation is rather imprecise.
The technique is easily extended to a two-dimensional configuration using a
laser light sheet and this makes it attractive for a wide variety of two-phase
flows. A typical IPI image, taken from a water spray, is shown in Fig. 8.54. Large
m= 0.5
m=0.6
m=O.7
m = 0.8
--oQ--- m = 0.9
---0--
~~~~::::~-::=--------------jO.61
45
- - m= 1.1
- - - m = 1.2
.. •.
m= 1.4
m = 1.5
-----. m= 1.3
-- ... -. m= 1.6
90
Receiver angle tJ, [deg]
Fig. 8.53. Angular interference fringe distance as a function of the receiving angle for different refractive indexes and for a particle diameter of d p = 100 11m. The interference results from reflection and first-order refraction (Ab = 532 nm)
474
8 Phase Doppler Systems
Fig. 8.54. Defocused image from a water spray (d p
= 20 ... 400 11m)
partieles exhibit more fringes in the defo cused image and small partieles less.
For large partieles, e.g. in the top center of the of Fig. 8.54, two slightly separated
cireles can be seen. For this partiele the distance of the glare points can be resolved with the imaging system and each glare point creates its own defocused
image, as illustrated in Fig. 8.51. Only in the overlapping region does interference appear.
The size of the partiele image on the out-of-focus plane is not related to the
partiele size, but will depend on the position of the recording plane relative to
the focal plane of the imaging system. The situation is pictured in Fig. 8.55. The
image diameter is given by
(8.89)
using Eq. (3.115) where da is the diameter of the aperture and f is the equivalent focallength of the imaging system (see section 3.2.1). The shape of the partiele image will correspond to the shape of the receiving aperture.
Laser
shecl
lmaging
oplics
Re.: rding
plane
d,
z,
2,
Fig. 8.55. Imaging situa tion fo r IPI
2,
l'ocal
8.4 Multi-Dimensional Sizing Techniques
475
The angular window observed in each image, LW r' is approximately equal to
L119 r
= 2arcsin(NA) = 2arcsin~
(8.90)
2z[
where NA is the numerical aperture of the imaging system defined by Eq.
(3.118). Thus, the diameter ofthe particle can be linearly related to the number
offringes in the defocused image, N fr = L1iJ r I L1<p(12) = Kd p , using for m > 1
K
arCSlnp
. 2z
d [
= ___----'--1
A
1
msm-r
• iJ
19 r
2
cos- + --r=========
2
19
-ym 2 +1-2mcos-t
I
(8.91)
and for m < 1 (Maeda et al. 2000)
K
arcsmp
. 2z
d1[
= -------'-A
1
msm-r
• 19
iJ r
2
mcos-- --r=========
2
19
-ym 2 +1-2mcos-t
I
(8.92)
The diameter of the particle can be determined by counting the number of
fringes in the out-of-focus image, independent of the image size. Alternative to
counting fringes within a given angular window, Min and Gomez (1996) suggest
the use of a photodiode array as a detector and to use a Fourier transform of the
oscillating intensity to determine the spatial frequency. This no doubt avoids the
±1 fringe count uncertainty; however, due to the short record length some windowing will be required, e.g. Hamming. Hess (1998) points out that a true farfield image is required to obtain straight fringes. In the near or middle field the
fringes exhibit curvature.
The IPI technique performs best when the intensity of the reflected and refracted rays are equal in intensity, which for water in air (m = 1.33) occurs at offaxis angles of about iJ r '" 65 deg for perpendicular polarization (Figs. 4.29 and
4.30) and iJ r ' " 90 deg for parallel polarization (Figs. 4.31 and 4.32). For air bubbl es in water, the reflected and first-order refracted light is about equal in intensity at an off-axis angle of iJ r '" 45 deg, see Fig. 4.34d. In principle, the IPI technique can also be used with combinations of other scattering orders. Generally
however, there is a limited number of angles for which only two scattering orders of equal amplitude dominate for a wide particle size range.
By using scattering angles with more than two scattering modes, additional
fringe systems appear. This is evident in the simulations presented in Fig. 8.56,
in which third-order refraction is seen to become influential. The spatial spectrum of the fringes show interference between first-order and third-order refraction as weIl as between reflection and third-order refraction, Fig. 8.56c. The
two sets of fringes with a small frequency difference result in a beat frequency
with a long modulation, as can be seen in the defocused image in Fig. 8.56b. The
476
8 Phase Doppler Systems
c
<>
'":>
~
'"
~ 2
::::;
<J
ReneClion and
fir. l-order rcfra cl ion
J)
Rcneclion a nd \
/Ihird -ordcr
rcfra':lion
o
20
First-o rd er and
Ihird -o rder
rcfraction
40
60
80
100
Frequeney 1. 1-1
Fig. 8.56a-c. Simulations ofIPI technique for a water droplet in air. a In-focus image with
three glare points. The intensity and the contrast is changed for better visualization,
b Out-of-focus image, for a rectangular aperture, c Spatial frequency spectrum from the
out-of-focus image
corresponding glare point, Fig. 8.56a, can be identified in the experimental result shown in Fig. 2.8. As Fig. 8.57 shows, the linearity between the number of
fringes N fr or the fringe frequency fi and particle size is valid for both interference contributions and thus, in principle two values of the particle size can be
determined from the image. The second value can be used for validation or for
estimating the refractive index.
The relation between fringe number or image fringe frequency and particle
diameter is not perfectly linear, as can already be expected from Fig. 8.57. In Fig.
8.58a the calculated image frequency is shown for a small particle diameter
range with a high resolution. The non-linearity is caused by optical resonances
inside the particle. The optical resonances limit the resolution of particle diameter to about l~, as is the case for the phase Doppler technique. In practice,
larger particles have weak resonances due to deviations from the ideal homo geneous or spherical case.
The resonances influence not only the frequency/diameter relation. Also the
intensity ratio between the glare points varies significantly with sm all particle
diameter deviations. This is illustrated in Fig. 8.58b. Therefore, the modulation
of the defocused image frequency depends on the particle diameter because the
intensity ratio between the glare points influence the modulation and a determination of the refractive index by using the intensity ratio is not possible (Schaller
2000).
Min and Gomez (1996) have shown the technique to be rather insensitive to
intensity amplitude variations of each scattering order and thus to collection
angle or to the finite Gaussian beam width in the laser sheet. They also indicate
8.4 Multi-Dimensional Sizing Techniques
477
~80r--.-,--.--.--.--r-,r-'--'--'-I-r-,--,--r--r-.--.--.--r-.
'-'
~
"
'2"" 60 -
....
.....
......
Image frequency:
First-order and third-order refraction
Reflection and first-order refraction
•• _
cpo
00 0000
._ • • -
~
D ODD
••••
]
• •••••
••••••
••••
• •-
••••
••••:~.ooDO
.......-0
000000
DODD
a DD
•• -
.-
a DO
00 0
•••
20 -
-
0000000
a DD
••••
•••
00000000
rP° o
.-
40 -
_
00 000
._
c.b
• • • • 00 000
ao D
-
~~:DDDD
0
0L-~~__L--L~__L--L~__L-_L-1J--L~L-~-L~__~-L~~
o
Particle diameter dp [Ilm]
50
100
Fig. 8.57. Simulations of the dependence of out-of-focus image frequency on the particle
diameter for the case visualized in Fig. 8.56.
b
a
"E'"
·0
0..
"...
'"
Ob
'0
..§
450
2
...'"
>-
.t::
~
.Ei"
22
24
Particle diameter dp [Ilm]
1 L..l...L..l..-L..1...L..L.L..1--'-..L.-'-'--'-...L..L.JL..L....l....J
25
26
27
Particle diameter dp [Ilm]
Fig. 8.58a,b. Dependence of intensity ratio and frequency in an out-of-focus image on
particle size. a Highly resolved frequency dependence on particle size, b Dependence of
intensity ratio of the glare points of reflection and first-order refraction on the particle
diameter
that the fringe frequeney is only a weak function of refraetive index, whieh is
also evident in Fig. 8.53 for m > 1 and ä r in the region larger than 45 deg. Massoli and Calabria (1999), who investigated the teehnique using inhomogeneous
particles, speeifieally reaetive fuel sprays, also drew this eonclusion.
Although the high resolution of photo graphie film is desirable, many authors
have sueeessfully employed medium resolution CCD eameras. Hess (1998) has
478
8 Phase Doppler Systems
implemented the technique using digital holographic recording, thus allowing
either near or far-field analysis from a single exposure. No information concerning the sensitivity to non-sphericity is presently available.
Another interesting feature of this technique is that the particle image size
will depend on the position of the particle on the z axis, as seen from Fig. 8.55
and from Eq. (8.89). Thus, all three position coordinates ofthe particle are available from an image as shown in Fig. 8.54.
A logical extension of the IPI technique is to use a double-pulsed laser source
and to conduct particle tracking between two successive images. This yields then
three components of particle velo city and particle size in three dimensions. Such
a combination has been demonstrated by Damaschke et al. (2000) and more recently by Maeda et al. (2000).
A further refinement, known as optical compression, has been introduced by
Kobayashi et al. (2000) to increase the measurable particle concentration. By
placing a cylindricallens in the imaging system, the particle images can be reduced to lines of oscillating intensity, avoiding much of the image overlap. In
one plane the image is in focus and in the other it is out of focus. The advantages
of such a system for measurements in higher dense sprays are discussed in section 8.4.3
This technique is also the basis of the differential laser Doppler anemometer
(DLDA) introduced by Rheims et al. (1999). In their device a CCD line array
spans an off-axis angle range and sampIes the IPI fringes in time as one particle
passes through the measurement volume of a standard laser Doppler system. In
this case the velo city can be determined from the laser Doppler signal and the
size from the fringe pattern recorded on the CCD array.
8.4.2 Global Phase Doppler (GPD) Technique
The difficulties of choosing a suitable scattering angle for the image recording
with the IPI technique, especially using aScheimpflug set-up known from the
Particle Image Velocimetry (Raffel et al. 1998), can be partially overcome using
the Global Phase Doppler (GPD) technique (Damaschke et al. 1999), as first introduced by Damaschke et al. (2000). In this technique two laser light sheets illuminate the measurement area at an intersection angle ,%, as shown schematically in Fig. 8.59.
With this configuration each illuminating laser sheet will contribute a glare
point for each visible scattering order/mode. A far-field interference pattern will
exist, corresponding exactly to the interference pattern produced using a phase
Doppler system. The difference to the phase Doppler technique is that the GPD
technique captures simultaneously the fringe patterns arising from many droplets within the illuminated plane and therefore the measurement volume is
much larger. Such a GPD image is shown in Fig. 8.60, taken from a water spray.
Note that both the IPI and the GPD interference fringes are visible and that they
are aligned orthogonal to one another. How intense the IPI fringes appear, depends on the choice of collection angle and the relative intensity of the reflective
glare points to the first-order refractive glare points.
8.4 Multi-Dimensional Sizing Techniques
Defocuscd
camcra
479
Dcfocused
parlidc images
hCCls
Ob crvdlion
lidd
Lighl shcci opl ics
Bcam plillcr
unil
1\
Pulscd laser
Fig. 8.59. Optical arrangement of a global phase Doppler system
Fig. 8.60. Defocused image from a global phase Doppler (GPD) system. The vertical
fringes arise from interference between reflection and first-order refraction (IP!). The
horizontal fringes correspond to the GPD technique. The image was taken from a water
spray (d p = 20 .. .400 11m )
In a mann er similar to IPI, the diameter of the particle can be related to the
number of fringes in each particle image.
Nfr=Kd p
For reflection the conversion factor
K
becomes
(8.93)
480
8 Phase Doppler Systems
1 _d_
" cos9rcos~+
2z[
-
RIi2
1-~sin~
4z[
1-~COS9rCOS~-~I- d~2 Sin~l
2z[
(8.94)
4z[
and for first-order refraction
(8.95)
Note that the GPD technique, as with the phase Doppler technique, requires
spatial coherence of the illuminating waves over the entire area of measurement.
The GPD technique exhibits several advantages over the IPI technique. The
glare points are always the same intensity and thus the fringe modulation is always a maximum. Furthermore, any scattering angle can be used for image
capture, especially attractive for implementation in a stereoscopie PTV system.
If only one scattering order dominates, like in the phase Doppler technique or
for opaque particles, one spatial frequency is imaged. In regions where several
scattering orders contribute to the signal, each order can be separated by a frequency analysis. The fringe spacing and also the measurement size range can be
adjusted by varying the intersection angle of the laser sheets. If both the IPI
technique and the GPD technique are used simultaneously, the size range of the
techniques can be combined and the orthogonal fringe patterns allow a verification of sphericity. If the particle is spherical, then the sizes determined from the
two interference fringe patterns will be the same. Finally, in contrast to the IPI
technique, the GPD technique can be used for measurement of opaque particles
by using the two glare points from reflection.
Just as the GPD method visualizes the phase Doppler fringes from each particle, the same can be achieved directly in anormal focused beam phase Doppler
system for one particle using a CCD line array spanning a range of elevation angles. Such a device has been demonstrated by Rheims et al. (1998) and termed
the differential phase Doppler technique. In this case the particle velo city is obtained directly from the laser Doppler signal and the spatial fringe pattern for
one particle is reconstructed using sequential signals in time from the CCD array.
8.4 Multi-Dimensional Sizing Techniques
481
8.4.3 Concentration Limits
The IPI and GPD sizing techniques are both relatively new and no commercial
systems are available yet. Indeed, a need for parameter optimization with respect to
•
•
•
•
•
Measurable size range (also detection ofnon-sphericity)
Measurable concentration
Field ofview, measurement volume
Required optical access
Accuracy (in size and in derivative quantities, e.g. concentration, fluxes)
can already be recognized. Girasole et al. (1998) and Massoli and Calabria (1999)
have presented some systematic computational studies. The work of Kobayashi
et al. (2000) and Kawaguchi et al. (2002) has been directed towards conditions of
higher particle concentration. In the following discussion, some fundamental
relations will be presented concerning the limitations of these techniques.
The generic situation for either the IPI technique or the GPD technique is
pictured in Fig. 8.61.
Normally the given parameters of the system include
• L1x"L1Yr
• nx,n y
•
z/
•
dp,m;n,dp,max
Dimensions of the CCD camera
Number of pixels in x and y directions
Minimum stand-off distance
Minimum and maximum particle diameter to be resolved
Given a particle number concentration in the flow, Hp, the task is to choose the
following system parameters
_-----z, ....
_-----z,------+
,'-----~
,_ ----Z,....
" ----~
z,
Ima ge of
Parlide I
(d , =cl, ... ,, )
tJ.Yr
CC D-Chi
Lens
In1<lgc 01
partidc 2
Laser Iighl shccl
FOall
plancs
Fig. 8.61. Optical arrangement for IPI or GPD
(J, =d._,) y ~,
482
8 Phase Doppler Systems
• fx,fy
• tz
• dax,day
• zr
•
Zz
Focallengths of the imaging lens
Thickness of the laser sheet
Diameters of the aperture
Position of the camera behind the lens
Stand-off distance
under the constraints
• The Nyquist criterion is satisfied for the fringes in each particle image, with
respect to the pixel resolution.
• The degree of image overlap does not exceed some statisticallimit. The degree of overlap will be expressed as an overlap coefficient, Z, defined as the
ratio of the area on the camera with two or more overlapping images to the
total area with particle images.
After choosing these parameters the dimensions of the observation area or detection area, Lix d , Liy d' will then be fixed.
Note that the imaging lens has been described using two orthogonal focal
lengths, allowing for cylindricallenses, and the aperture has been described using two orthogonal sizes, sometimes employed for image compression (Kawaguchi et al. 2002)
Furthermore, the size of the particle image is not a function of particle size
but of position of the particle within the laser sheet, as depicted schematically in
Fig. 8.61. Thus, the change of image size between two consecutive pictures yields
the velo city component normal to the laser sheet.
8.4.3.7 Governing Equations
The most important limiting factor for the analysis of IPI or GPD images is the
particle image overlap. An overlap coefficient Z is defined as the ratio of the
area of particle image overlap to the overall area of particle images. The expectation of Z can be derived as a function of the parameters of the optical arrangement (Fig. 8.61) and the particle density. It is given as the ratio of the
prob ability that a specific camera point Q is covered by more than one particle
image to the probability that the point Q is covered by any particle image.
The overlap coefficient is written as
P(N i 2: 2)
Z=P(N i 2:I)
(8.96)
where Ni is the number of particle images covering the point Q.
The diameters of a particle image d ix and d iy depend on the particle position
z p normal to the laser sheet. The functions are given by
d. (z P )=d ax l-z r
IX
[_1
11+d.
f __
zp
,xO
x
(8.97)
8.4 Multi-Dimensional Sizing Techniques
d. (Z )=d
lY
P
ay
1-z
r
[_1
1) +d.
f __
Y
zp
'yO
483
(8.98)
Because of diffraction and blooming effects d;xo and d;yo can be assumed to be a
minimum of 3 pixels, like in partiele image velocimetry (PIV).
The aperture must not necessarily be circular or elliptical, also rectangular or
any other shape could be used. For the present purposes however, the aperture
size has been characterized simply using two orthogonal dimensions, dax and
d ay . The values d;x and d;y are the corresponding dimensions of the partiele image depending on the partiele position z p. The image area is given by
Aj(zp) =
Sa d;x(zp)d;y(zp)
(8.99)
with the coefficient Sa which depends on the aperture shape. For an elliptical
shape Sa = 1t /4 and for a rectangular shape Sa = 1
The transform of the partiele density Hp into the density of partiele images
varies with z. For a given z position the density of partiele images is
(8.100)
The area density of partiele images 71; on the CCD camera can be obtained using
(8.101)
Z/,mm
The number of partiele images covering a specific point Q on the camera is
Poisson distributed
(8.102)
where the Poisson coefficient
given by the integral
~
represents the mean imaging density and is
(8.103)
with ri; as in Eq. (8.100) and the area A; of a partiele image obtained from a partiele at the z position as given in Eq. (8.99). Combining Eqs. (8.97)-(8.100) and
(8.103) yields
~~Oi,( ~[U -;},+ ;, d',"][(:, -;}, +:, d,," JZ!"~-Zl"'")
484
8 Phase Doppler Systems
(8.104)
for zr(!x-1-z-1)<1 and zr(!y-l-z-l)<l in the range [z/,m;n;z/,max]' Otherwise, an
appropriate subdivision of the integral is necessary.
The overlap coefficient can be expressed using Eq. (8.96) as
P(N;
X= P(N;
~
2)
~ 1)
l+~-
~
1-exp(-~
(8.105)
with the factor ~ given by Eq. (8.104). The allowable concentration rlp for a
given degree of overlap X can be determined from Eqs. (8.104) and (8.105).
Closely related to the overlap coefficient is the ratio of the illuminated to the
non-illuminated area on the camera.
P(N; ~ 1)
X = P(N; =0)
,
exp(~-l
(8.106)
which can be readily estimated by simply counting the illuminated pixels. Once
X' is known, ~ can be computed using
(8.107)
hence, X can also be readily estimated. In an implementation of the IPI or GPD
techniques, these relations are useful for validation, since tolerable limits for X
or X' can then be specified.
The field of view is now fixed since the magnification z/ I zr is known
(8.108)
The Nyquist constraint can now be examined. The Nyquist limit will be
reached first for the particles resulting in the smallest image, i.e. those in the laser sheet farthest from the focal plane. Their image size is given by
d . . =d
I,mm
a
[l-Z [~f __
1
r
zl,min
II
(8.109)
The largest particles, with diameter d p,max' will result in the maximum number of
fringes, N Jr,max' where the number of fringes is linearly related to the particle size
through
(8.110)
The value of l( will depend on what scattering order is being exploited by the
technique and on the position of the camera and is given for the IPI technique in
Eqs. (8.91) and (8.92) and for the GPD technique in Eqs. (8.94) and (8.95).
The Nyquist criterion specifies that one fringe must cover at least two pixels,
thus
8.4 Multi-Dimensional Sizing Techniques
2Ax
di,min
nx
N fr,max
485
- - r< - - (8.111)
and yields the maximum measurable particle diameter
d
= _xn
p,max
2K AX r
[l-Z [~f __
1
zl,min
r
II
The lower particle sizing limit is given when at least
(8.112)
Nfr,min
fringes, e.g.
N fr,min = 1, are covered by the aperture
N fr,min
= Kdadp,m;n
(8.113)
Therefore, the smallest particle size is given by
Nfr .
d p,mm.=~
Kd
(8.114)
a
With these parameters for the measurable size range (Eqs. (8.112) and
(8.114», the measurable concentration (Eqs. (8.103) and (8.105» and the field of
view (Eq. (8.108» some example systems will be analyzed in the next section.
8.4.3.2 Example Systems
In practice, the size of the receiving unit, and therefore, the maximum size of the
aperture da is given. For the following cases a circular aperture (Sa = 1(; /4) with
a maximum diameter of da = 40mm will be assumed. The receiver, generally a
camera, observes water droplets (m = 1.33) in the laser light sheet(s)
(A. b = 488.0nm) with an observation angle of (lJ r =fftr =90deg), meaning that
the camera focal plane is parallel to the laser light sheets.
Under these conditions, the minimum measurable droplet size Eq. (8.114) can
only be changed by changing the position of the light sheet relative to the aperture. This changes the collection angle for the camera and therefore the minimum number of fringes over the aperture. Using a smallest droplet size of
dp,m;n = 311m and a minimum number of fringes of N fr,min = 1, this leads to a laser light sheet position of roughly ZI "" 200mm. Normally ZI is restricted by the
experiment (stand-off distance) and therefore the stand-off distance and the aperture size limits the smallest measurable particle diameter. Generally, the distance between the back principal plane and the detector (CCD-Chip) is given by
the camera design and the objective. Often an adjustment is possible in connection with aScheimpflug configuration. For the following cases, the position of
the chip (Ax r = 8.58 mm, Ay r = 6.86 mm, nx = 1280, ny = 1024) behind the pack
principal plane is assumed to be zr "" 100mm. Knowing already the position of
the light sheet and the position of the detector, the magnification is fixed at a
486
8 Phase Doppler Systems
value of ß = 0.51 (Eq. (3.116» and the size of the observation field is
Llx d XLlYd =17mmx14mm (Eq. (8.108». This sm all observation field can be increased by increasing the distance of the laser light sheet from the front lens of
the camera, but the smallest detectable partide size increases with this parameter also. The compromise is between smallest measurable partide size and field
of view, as in focused imaging techniques. The difference is that the IPI and GPD
techniques can resolve much smaller partides compared to direct imaging techniques (13 /lm/Pixel for this example). This is the main advantage of IPI and
GPD techniques: observing a larger field of view with the same partide diameter
limitations while achieving aresolution comparable to direct imaging techniques.
The focallength must be chosen to be Ir = 66.66 mm to ensure that the focal
plane for zr '" 100mm is at z/ '" 200mm. This can normally be adjusted using
the lens of the camera. The position and thickness of the light sheet determines,
together with the Nyquist criterion, the maximum measurable partide size and
the resolution of position perpendicular to the light sheet in the z direction. A
light sheet at z/ '" 198mm and a thickness of t/ = Imm limits the maximum partide size using the IPI technique to dp,max = 35 /lm (Eq. (8.112». In this case the
partide is located at zp '" 198.5mm and produces the smallest defocused image
of 22.5 pixels diameter with 11 fringes. By additionally using the GPD technique
with an intersection angle between the two light sheets of 8= 15deg, the measurement range can be extended to dp,max = 228 /lm.
The resolution in z direction perpendicular to the light sheet, given by the size
ofthe defocused images, is 15.2 pixel/mm.
In practice, the performance of each system is characterized by the variation
of the overlap coefficient X with partide number concentration. The maximum
allowable value of the overlap coefficient X without incurring processing errors
is not yet dear, but will depend on the image processing software that is available and whether or not the positions of the partide images can be separately
established, either with a second camera in focus or through software. A value of
0.1 to 0.3 should, however, be tolerable.
The degree of image overlap is mainly determined by the laser light sheet position and the thickness of the laser light sheet. Increasing the distance of the laser light sheet from the focal plane increases the maximum measurable partide
diameter; however, the overlap of images increases significantly. By using the
GPD technique, this effect can be compensated by using another set of fringes
and a shorter distance to the focal plane. Another possibility is to use optical
compression. In this case the aperture is reduced in one direction to avoid large
defocused images. The same image size reduction but with higher scattered intensity can be achieved by using a cylindricallens in the optical path as shown in
Kobayashi et al.(2000).
The influence oflaser light sheet position, laser light sheet thickness and optical compression on maximum measurable concentration will be illustrated using the 6 different systems specified in Table 8.6. Each of the systems have been
evaluated using the above analysis and their performance has been expressed in
8.4 Multi-Dimensional Sizing Teehniques
487
Table 8.6. Input parameters and specifieations of the example optieal systems
Symbols Input Parameters
Units
Aperture shape
A
B
C
D
• • • •
E
I
F
•
66.66 66.66 66.66 90.0 66.6666.66
fx
fy
Foeallength (x direetion)
mm
Foeallength (y direetion)
mm
d ax
Aperture diameter (x direetion) mm
40
20
10
40
40
40
d ay
Aperture diameter (y direction) mm
40
20
10
40
3
40
Zjx
Camera foeal plane (x direetion) mm
200 200
200
900
200
200
66.66 66.66 66.66 90.0 66.6666.44
Zjy
Camera foeal plane (y direction) mm
200 200
200
900
200
198
Zz
Laser sheet position
198 198
198 880
198
198
ß
Magnifiea tion
Llx d
Observation field (x direction)
mm
LlYd
Observation field (y direetion)
mm
dixtnin
Smallest image size (x direetion) pixel
22.5 11.3 5.6
14.7 22.5 22.5
diymin
Smallest image size (y direetion) pixel
22.5 11.3 5.6
14.7 =4
dix,max
Largest image size (x direetion) pixel
37.7 18.9 9.44 15.5 37.7 37.7
diy.m ax
Largest image size (y direetion) pixel
37.7 18.9 9.44 15.5 =6
z resolution (x direetion)
e
tz
mm
0.51 0.51 0.51 0.11 0.51 0.51
17
17
17
76
17
17
14
14
14
60
14
14
pixel/mm 15.2 7.6
3.8
z resolution (y direetion)
pixel/mm 15.2 7.6
3.8
GPD interseetion angle
deg
40
15
20
=3
=8
0.77 15.2 15.2
0.77 1.14 =15
15
Conversion faetor IPI
fringes/l1m 0.3230.1620.0810.0730.3230.323
Conversion faetor GPD
fringes/l1m 0.0490.0330.0320.011 -
Min. particle diameter by IPI
Max. particle diameter by IP!
11m
11m
34.8 34.8 34.8 101 24.8 34.8
Min. particle diameter by GPD
11m
20.2 30.4 30.6 89.8 -
Max. particle diameter by GPD
11m
mm
mm· 3
228
Laser light sheet thickness
Max. eoneen tra tion (% = 10 %)
3.1
1
6.2
171
12.4 13.7 3.1
87
660
3.1
1
1
1.71 6.85 27.4 0.33417.9 13.6
terms of the value of the overlap coefficient as a function of particle concentration, as shown in Fig. 8.62.
System A corresponds to the specifications given in the above discussion,
using a da = 40 mm circular lens aperture. The maximum measurable concentration, assuming an allowable overlap coefficient of X = 0.1 and using a laser
light thickness of 1 mm is Hp < 1. 7 particles I mm 3 • As a comparison, upper limits
ofthe phase Doppler technique are considered to be about 102 particles/mm3 •
The remaining example systems (B-F) illustrate various means of increasing
the measurable concentration.
488
~
8 Phase Doppler Systems
100
~
"E<lJ
'0
10
r.;:::
.....<lJ
0
u
0.
'"
-;:::
<lJ
>
0
~
0.1
100
~
"E<lJ
'0
10
r.;:::
'"0"'
<lJ
u
0.
'"
-;:::
<lJ
>
0
~
0.1
100
~
"E<lJ
'0
10
r.;:::
'"0"'
<lJ
u
0.
'"
-;:::
<lJ
>
0
10"'
10'
10
10'
-
10"'
10"'
3
10
-
10'
3
Particle concentarion n p [partides x mm"] Particle concentarion np [particles x mm"]
Laser sheet thickness t, [mm]
=.-cf-
0.1
~
1
-- 2
--0--
5
-
10
Fig. 8.62. Overlap coefficient as a function of number concentration and laser sheet
thickness for example systems A to F from Table 8.6
Reducing the size of the imaging aperture. Example B reduces the imaging aperture from 40 mm to 20 mm and example C uses only a 10 mm aperture. The
particle images become sm aller and the measurable concentration limits increase to 6.85 and 27.4 particles/mm3 respectively. Since the IPI fringe spacing
remains constant, the minimum resolvable particle diameter increases from
3.1/J-m to 6.2/J-m and 12.4/J-m respectively. This increase in minimum measurable size, which also occurs for the GPD technique with reduced aperture size,
can be compensated in the GPD technique by using larger intersection angles;
however, then the maximum particle diameter is reduced. The GPD intersection
angles for the example systems Band C have been chosen to provide a size range
overlap between the IPI and the GPD systems.
Reducing the Magnification. Example D reduces the magnification with respect
to system A by using a larger focallength lens, resulting also in a larger standoff
8.4 Multi-Dimensional Sizing Techniques
489
distance 2/. The field of observation increases more than four times; however,
the resolution of z position decreases significantly. Because of the larger standoff
distance, less fringes are on the aperture and the smallest and the largest particle
diameters increase in comparison to system A. While the image sizes are smaller
than in system A, the maximum concentration decreases, since the number of
particles on the camera increases with the larger observation field.
Rectangular Aperture. Example system E employs a rectangular aperture with
an aspect ratio of 40/3 to reduce image overlap. Otherwise the specifications correspond to system A. This greatly increases the maximum concentration limits
to 17.9 particles/mm3 for a 1 mm laser light sheet. However, a parallel GPD cannot be implemented and thus, the overall size range is greatly reduced.
Optical Compression. Example system F achieves an image compression by introducing astigmatism into the imaging optics. In this example the image size
reduction in the y direction is about a factor 5... 7.5. This also increases the
maximum concentration limit (l3.6 particles/mm3 ). Like for the rectangular aperture, the GPD technique cannot been used in combination with the IPI technique and therefore the maximum particle size is limited by the IPI technique to
dp,max
= 35 j.,lm.
Reducing the thickness of the laser sheet. This influence is illustrated on all of
the diagrams in Fig. 8.62. While a thinner laser sheet allows higher particle concentrations to be measured, the range of the third velocity component is reduced, since for a thinner sheet the particle will more probably exit its bounds
between laser pulses.
Increasing the allowable overlap coefficient. This measure has been briefly discussed above. If the processing software can tolerate higher overlap coefficients
X, the maximum concentration limits can be increased considerably. To date
there is little experience with appropriate image processing software. It appears
that two principle tasks must be accomplished. The first is to find the position
and size of each image and the second is to determine the fringe spacing or frequency. The image overlap renders the first task more difficult. However, there
are several system concepts developed to yield the image position optically. For
instance a second camera could be operated in focus to identify particle image
centers. Under these circumstances, the allowable overlap may increase considerably.
The above examples illustrate that proper optical design can significantly improve the performance of the IPI or GPD technique. Both areduction of the laser
light sheet thickness and an increase of system magnification (smaller field of
observation) increases the maximum allowable concentration. However, it is
apparent that the IPI technique or the GPD technique on their own exhibit
rather limited measurement size bandwidths. The only non-compromising
method of increasing this is by choosing a CCD camera with a larger number of
pixels, something which should become more practical in the future.
The analysis in this section has considered only the parameters of the imaging optics in a very idealized manner. There are several additional influences
490
8 Phase Doppler Systems
which may make it difficult to achieve the theoreticallimits presented above. For
instance there are several causes far fringe distortion, which would immediately
require so me relaxation of the Nyquist constraint. One possible cause is nonsphericity of the particle. Fringe distortion also occurs in the near and medium
fields due to lens aberrations, as discussed by Hess (1998) and Girasole et al.
(1998).
Still another cause for fringe distortion is multiple scattering, either from
within the laser light sheet or in the path between the light sheet and the receiver. This is similar to cases discussed for laser Doppler or phase Doppler systems. As in these systems, the degree of distortion due to multiple scattering is
not generally sufficient to noticeably effect the measurement results, because the
partides are too far apart.
If fringe distortion does occur for any of the above reasons, the image compression technique will be particularly effected. The modulation depth of fringes
along the longitudinal image axis will be directly reduced. A fuH image without
compression would allow a more effective determination of the fringe number/frequency.
The influence of optical compression is studied in more detail in Fig. 8.63. In
Fig. 8.63a the influence of reducing one dimension of the aperture on the maximum allowable concentration is shown. Figure 8.63b shows the same dependence when the astigmatism of the receiving lens is varied. In both cases an increase of maximum allowable concentration of up to a factor 100 can be
achieved. However, with an aperture dimension reduction, the light intensity on
the detector decreases. From this point ofview optical compression using astigmatism would be preferable. Note that the relative gain in maximum allowable
concentration reduces for thicker laser light sheets.
b
a
<=I
0
"-§
I..;
Ei 10'
Ei
;:: '"
'"<=I u"€'"
u
0
u
'"
"d
'-8
'"0..
'"
10'
~
"
11::
10
Ei
"Ei
'R
:;:s'"
10"
10-'
0.01
0.1
1
Aperture ratio d,,,t d= [-J
Laser sheet thickness t, [rnrn] = ----;- 0.1
66.4
66.6
66.8
Focallength in y direction ~,[rnrnJ
-.....- 1
------ 2
--- 5
- - 10
Fig. 8.63a,b. Dependence of maximum allowable particle concentration on image aspect
ratio. a Aperture ratio, b Receiving lens astigmatism
492
9 Further Partide Sizing Methods Based on the Laser Doppler Technique
amplitude occurs when the particle is at the center of the measurement volume
and takes the value (Eqs. (3.188), (4.158), (3.30) and (3.62), Albrecht et al. 1993)
I ACmax (
d ) - 8 q1J q AbPb (d) (d )
p ---h-d2 k 2 r
p G p
1tC
wb
(9.1)
b
where Pb is the power of the laser beams.
For a given detection threshold I d in the electronics and for a maximum of
the scattered intensity from particles with diameter d p , I ACmax (d p ), the detection
volume dimensions are given by Eq. (5.42) which, like other parameters such as
the number of signal periods, will depend on particle size.
The detection area of particles with diameter d p is (Eqs. (5.148) and (5(5.149)
Ad (d p ) = ..!..1tcoboln( I Acmax(d p ) ] = A oFk- 1 (d p )
2
(9.2)
Id
with
(9.3)
The contribution of particles with diameter d p to the total flux of particles
(number of particles with diameter d p per unit time) is then
(9.4)
where npd(d p ) is the number concentration and vpx is the velocity of particles
with diameter d p •1 The diameter dependent particle flux density (number of
particles with diameter d p per unit time and area) is
(9.5)
This quantity, which is dependent on particle size, is assumed to be constant
over the detection area A d (d p).
Grouping all particles into 'mono-disperse' classes, d p,l' d p,2' ... ,dp,max, (Holve
and Self 1979), the total particle flux is a summation over all the flux densities
and their respective detection areas
max
Qp "" LqPd (dp)A d (d p)
(9.6)
j::::::l
as shown in Fig. 9.1.
1
As in chapter 5 the subscript d indicates that the quantities are par tide diameter dependent because of the detection threshold I d and they could be different for each
partide diameter dass
9.1 Techniques Based on Signal Amplitude
q,.,(d ,)
493
= " ",, (d ,.,lv,. Cd , )
q... Cd ,.1) ="""Cd , .. )v" (cl,..>
Fig. 9.1. Distribution of the signal rate (particle flux) as a function of signal amplitude,
dp,l < dp,2 < dp,3, qpAdp,l) < qpAdp,3) < qpd(dp,2)
Similarly, the maximum number of signal periods depends on the partide diameter and the particular dimensions of the measurement volume.
2a o
_
No
iJx~Fk(dp)
-
~Fk(dp)
(9.7)
where No is the number of finges in measurement volume (Eq. (5.50)). Both the
amplitude and the period number distributions can be used as the basis for a
partide sizing method. In the next step the signal rate of a polydisperse partide
flux will be derived for a given amplitude detection threshold. Each partide dass
can contribute according to its specific detection volume area.
9.1.1.1 Statistics of the Number of Periods
The detection area and the signal rate (partide flux for 100% detection and validation) are functions of the number of periods (Fig. 9.2)
A d (d p ,N)=7rboco
N!ax(d p )-N 2
(9.8)
2
No
and
(9.9)
The distribution of the number of periods for a given signal rate (see Fig. 9.3) is
given by
_ dQpd(dp,N) _
_
N
(
)
- 2A on pd (d p )v pJd p)-2
H Nd(dp,N) -
d -N
No
(9.10)
The maximum prob ability will be determined by the partide flux density
vpx(dp)11pd(dp) and the maximum number of periods NmaxCdp) for each partide
494
9 Further Particle Sizing Methods Based on the Laser Doppler Technique
x
y
z
y- o
I
y = y.
t
I
I
1
v,
Parlidc
Fig. 9.2. Distribution of periods over the detection area
11 M,(N)
N
Fig. 9.3. Statistics of the signal rate
< vpX(dp,3)npAdp,') < vpx (dp,2 )npd(dp,2))
HNd(N),
d p" < dp,2 < d p,3'
vpx(dp,,)npd(dp,,)
size. A change of the minimum required number of periods from N to N + 1 will
result in a change of the partide flux density of
L1QPd (d p ) = TC boc ovpx (d p)npd (d p ) 2N : 1 = v px (d p)npd (dp)M d
(9.11)
No
where Md is not a function of partide diameter. Practically, a minimum number of periods is prescribed N m;n' According to Eq. (9.7), this is directly related
to a minimum amplitude and therefore to a minimum partide diameter, dp,m;n'
The signal rate using N = N m;n + 1 periods is influenced by all particles
d p > d p,m;n by the amount
(9.12)
Through Eq. (9.5) there is a direct relation between the partide dass contribution to the partide flux density. The proportionality constant is the difference
9.1 Techniques Based on Signal Amplitude
495
of the cross-sectional areas. For the signal rate based on N m;n for instance, all
particle dasses n make a contribution
LlQNm;n
= n;!02CO (2N m;n + 1)[ Llqpd(dp,l) + Llqpd(d p,2)+ ... + Llqpd(dp,n)]
°
(9.13)
n
LlQNm;n = Md LLlqPd(dp)
j~l
In the range N m;n ::::; N; ::::; N max=2(N m;n + i) -1, the signal rate is given by the
sum over all flux densities LlQN; with i = 1 ... ~ (N max + 1) - N m;n'
(9.14)
with
LlQNl
Llqpd (dp,l)
LlQN2
Llqpd(dp,2)
Qpd(d p)= LlQN3
qpd(d p)= Llqpd(dp,3)
(2N m;n
0
AN=
LlQm
Llqpd(d p)
+ 1) (2N m;n + 1) (2N m;n + 1)
(2N m;n +3) (2N m;n +3)
(2N m;n +3)
(9.15)
(2N m;n +1)
0
0
(2 Nm;n +5)
(2N m;n + 5)
0
0
0
2(N m;n +i)-1
(9.16)
Each column in the AN matrix represents a partide size dependent detection
area. The width of the matrix is given by the number of dasses. The example
above demonstrates the highest possible dass resolution according to period
number. An integer scaling factor k > 1 can be used to group dass es and expand
the width of each dass qpd, reducing also the rank of the matrix.
Inverting the matrix AN leads to an expression for the individual partide flux
densities
qpd (d p) = C;IA~QPd(dp)
(9.17)
The inverted matrix AN takes the form
1 A-N-
(2N m;n +lt
(2N m;n +3t
0
0
(2N m;n +3t
(2N m;n +5t
0
0
(2N m;n +5t
o
o
o
o
o
o
(9.18)
496
9 Further Particle Sizing Methods Based on the Laser Doppler Technique
If the velo city of all partides is equal, then Eq. (9.14) yields also directly the partide size distribution
(9.19)
The individual steps necessary to apply the technique are summarized as follows:
• Over a time period At the partide statistic AQ(N) is recorded
• According to the maximum number of periods observed, and possibly applying a scaling (grouping) factor k, the size of the AN matrix is chosen
• The link to partide size is achieved through the integral scattering function
G(d p), thus the technique requires calibration with partides of known size,
dp,c. For these partides, the maximum signal amplitude IAcmax(dp,J and/or
the maximum number ofperiods Nmax(dp,J is determined. Furthermore, the
scattering function must be unique in the investigated size range (monotonie
increasing with size). Ifthis is not the case, a courser dass grouping may solve
the problem. The integral scattering function in the Rayleigh range is given
approximately by
(9.20)
where the constant A is given by the partide properties and the constant B could
be between 6 and 10 (see Fig. 4.11).
With Eqs. (9.1) and (9.7) a relation between the calibration partides and any
given measurement value can be found
r(dp)G(d p)
(9.21)
r(dpJG(dpJ
The diameter follows from
(9.22)
It can be shown that the dynamic range of the technique with B = 2 ... 3 and
N max / No =0 ... 1.9 is dp / dp,c = 1...10.
9.1.1.2 Statistics of the Signal Amplitude
The processing using amplitude statistics turns out to be somewhat more flexible (Hintze 1993). The maximum signal amplitude IAcmax(dp) is determined and
the distribution is then divided into i =1,2, .. .,n dasses I max ,;- Using Eq. (9.4), and
similar to the Eqs. (9.13) and (9.17), a relation between signal rate and partidesize dependent partide flux density can be established. The proportionality factor is again the difference in cross-sectional area of the detection surface, i.e. the
matrix of these differences
(9.23)
9.1 Techniques Based on Signal Amplitude
497
with
In I max ,2
Imax,l
0
InI max
,2
In I max,2
-Imax,l
InI max,3
-I max ,2
AA=
0
0
InI max
,2
-Imax,l
Imax,l
InI max
,3
--
InI max
,3
--
I max ,2
I max ,2
InI max
,4
--
InI max
,4
--
I max ,3
0
0
(9.24)
I max ,3
:
:
0
InImax,n
---
0
lmax,n-l
1
-1
InI max
,2
--
InI max,3
--
Imax,l
0
A-Al
1
-1
InI max
,3
--
InI max
,4
--
I max ,2
0
0
I max ,2
-
-
0
0
0
I max ,3
1
0
(9.25)
In I max,4
I max ,3
:
0
0
0
1
0
In
Imax,n
Imax,n-l
For equal velocities in each partide dass, the partide size distribution is
available directly from the distribution of the signal rates. The principle of the
technique is illustrated in Fig. 9.4. The distribution of signal amplitudes
QA (IACmax (d p )) (3 rd quadrant) is available as a measurement quantity. Over a duration of Llt the distribution of burst amplitudes is accumulated. Through an
inversion of the AA matrix, a distribution of partide size dependent maximum
amplitudes is obtained, H(IAcmax(d p )) (2 nd quadrant). Since in the inverted matrix only the diagonal and the elements above are non-zero, only two dasses of
burst amplitude contribute to this partide-size dependent, maximum signal
amplitude. The distribution H(IAcmax(d p )) already corresponds to the partide
size distribution (4th quadrant). The equivalence is established through the
scattering function G(d p ) (Ist quadrant). In principle the scattering function can
be computed, the incident laser intensity in the measurement volume can be
measured and a given output voltage (amplitude) can be related to a particular
partide size. However the amplification stages are not easily quantified and
therefore a calibration with a known partide is necessary (Fig. 9.4).
The division ofthe total amplitude range I d :5, I max :5, I ACmax into dasses usually
follows one of two possibilities. The first is an equal division along the x axis
498
9 Further Particle Sizing Methods Based on the Laser Doppler Technique
Maximum burst amplitude
IACm,/d p )
G)
Y(d p)G(d P.')
Unknown
distribution
Range of
A-matrix
Measured particle
size distribution
particles
Irn,,(d p )
Burst amplitude
Fig. 9.4. Method of statistics of signal amplitude
with dass width .dk x ' This corresponds to the situation when counting signal periods, but is somewhat more flexible since the divisions are not restricted to an
integer number of periods. This leads to
~= exp(-2(.dk x i)2)
(9.26)
I ACmax
The second possibility is a non-linear division, for instance a logarithmic spacing.
~ = exp( -2.dk))
(9.27)
I ACmax
For an equal division, the differences of cross-sectional area take the form
LlAü = 1t boco.dk~(2i + 1)
(9.28)
and the A matrix with its inversion becomes
3
0
3
5
3
5
.1..
_.1..
5
0
1
"5
-7
0
, A-1 = 0
0
.1..
0
0
0
0
3
A= 0
0
7
7
0
0
0
2i max
5
3
+1
0
0
1
7
(2(i max
+1)t
(9.29)
9.1 Techniques Based on Signal Amplitude
499
The non-linear division leads to
(9.30)
M<LL = 11: bOcOL1k a
and the matrix takes the form
1 -1
1
1
1
1
0
1
1
1
0
A= 0
0
1
1
A-'·= 0
0
0
0
1
0
0
0
1
-1
0
0
1
0
0
0
1
(9.31)
Thus, two techniques are available for partide sizing in the micron and submicron range. An extension to the case of a distributed velocity function is possible in that the entire procedure is repeated for each velo city dass.
In Fig. 9.5 a typical measurement result using this technique, taken from an
aerosol generator, is shown.
~
.
~.. IOOO
CI
200
500
Burst amplitude
Ei
Ei
600
r-
I
lm~
[a.u.]
Maximum burst amplitude
I
IAcm"
I
[a.u]
-
200 '-
Fig. 9.5a-c. Particle size distribution in an aerosol. a Histogram of burst amplitudes,
b Histogram of the particle size dependent maximum amplitudes, c Particle size distribution (8000 particles)
500
9 Further Particle Sizing Methods Based on the Laser Doppler Technique
9.1.2 Combined Laser Doppler and White Light Sizer
Besides the necessity for calibration, one of the main difficulties with amplitudebased techniques is that over a large size range the scattering amplitude does not
increase monotonically with size for a point detector, thus, the amplitude signal
is ambiguous. The ambiguity can be reduced by using a finite sized receiving aperture, but not sufficiently. A second approach is to use a combination of several
wavelengths, most easily realized with a white light source. The superposition of
scattering functions of different wavelengths and for a given scattering angle and
particle material may result in a more mono tonic change of scattered intensity
with particle size. Combining such a device with a conventionallaser Doppler
system yields a single particle counting device for both size and velocity.
Such a device was first suggested by Durst and Umhauer (1975) and later realized and applied by Kleine et al. (1982) and Ruck and Pavlowski (1984). The
optical arrangement is pictured in Fig. 9.6. The laser Doppler system was a conventional forward scatter arrangement. The white light source is a halogen lamp,
focused using a microscope objective and imaged to a 100 fJlll spot in the measurement volume of the laser Doppler system. A photomultiplier positioned at an
off-a~:is scattering angle of 90deg was fitted with a quadratic pinhole to truncate
the measurement volume at 100 11m, thus effectively forming a cubic measurement volume. The focallength of the white light system was 15 mm. The 90deg
scattering angle was chosen more out of mechanical convenience than due to
optical considerations. After calibration with spherical particles, the instrument
yields an optically equivalent particle diameter, through the amplitude of the
white light detector.
Transmi11 ing
optics
Pinhole
Photo-
Lens
1
Laser DOPllcr
signal processing
Fig. 9.6. Optical arrangement of combined laser Doppler and white light sizer
9.2 Time-Shift Technique
501
9.2 Time-Shift Technique
The time-shift technique was introduced already in section 2.3 and equations
giving quantitative expressions of the time shift in terms of optical, particle and
flow parameters have been presented in sections 5.1.3 and 5.3.4. In the present
section possibilities of using the time-shift technique for particle sizing will be
explored, first for forward scatter arrangements and then for backscatter configurations.
The time-shift technique is only possible with shaped beams and exploits the
measurement volume displacement. This displacement is also used by other
techniques, like the dual-burst technique (Onofri et al. 1996), which is discussed
in section 8.2.4 and the pulse displacement technique (Pavlovski and Semidetnov 1991, Lin et al. 2000). Also Hess and Wood 1993 use the tempo rally separated signals of different scattering orders for particle characterization.
The essence of all these techniques lies in the realization that with a shaped
beam, each scattering order/mode exhibits its own virtual image of each incident
laser beam for every detector. The virtual images are defined over the scattered
intensity as a function of the particle center position for a specific receiver location. These images all have the same structure as the incident beams but are displaced in space (see Fig. 5.22). The magnitude of the displacement depends on
the scattering order/mode, the receiving location, the relative refractive index,
the particle diameter and the particle shape. Thus, if the different scattering orders/modes are identifiable in the received signals at specific detector angles and
the relative refractive index is known, the diameter of a spherical particle can be
estimated from the time shift between them. Using only one receiver, these
technique are restricted to particles which are large compared to the beam diameter, typically for particles larger than one third the beam diameter. With two
or more receivers much smaller particles can be measured, as shown below in
section 9.2.1.
Particle sizing using the time-shift between fractional parts of the signal necessarily requires a measurement of the particle speed. The time shift between
scattering orders/modes is measured and this must be related to the volume displacement (section 5.1.3), hence to the particle size, through speed. Several
authors (Pavlovski and Semidetnov 1991, Lin et al. 2000) achieved this using two
laser beams in a time-of-flight fashion, which is called the pulse displacement
technique. Alternatively two beams can be brought to intersection as in laser
Doppler systems and the velo city can be measured from the signal modulation
frequency. Hess and Wood (1993) and Onofri et al. (1996) used such a configuration with only one detector and measured parameters of large particles by using the time-shift between different scattering orders.
The time-shift technique introduced by Albrecht et al. (1993) uses two detectors which are symmetrically placed about the optical axis z. This optical arrangement corresponds exactly to the phase Doppler arrangement as illustrated
in Fig. 5.44. In keeping with the notation for standard phase Doppler systems,
the angle lf/r is then known as the elevation angle and the off-axis angle is 9r'
The particles traverse the beam intersection volume along the x axis and the
502
9 Further Particle Sizing Methods Based on the Laser Doppler Technique
time-shift between signals from different receivers but from the same scattering
order is used. This technique will be considered below in investigating various
approaches for particle sizing in forward and in backscatter. Especially for the
backscatter configuration several scattering orders contribute to the signal and
the dual-burst technique can also be used.
Before continuing further with specific examples of optical configurations for
the time-shift technique some general expressions for the magnitude of the time
shift will be given. A receiver in the y-z plane (Ij/ r = 0 deg), as shown Fig. 5.1,
detects the signal maximum when the x co ordinate of particle position is equal
to zero. For a receiver position with Ij/r 7= 0 deg, the signal maximum is shifted in
time relative to the particle position at x Op = o. The magnitude of the time shift
in reflection mode for one arbitrarily placed receiver is
~t
(1)
r
dp [
coslj/rcostPrtan~-sinlj/r
4.J2 V x ~l- cos Ij/r costPr cos~ - sin Ij/r sin ~
=-----
-r========================
1
~l-COSlj/rCOstPrcos~+sinlj/rsin~
coslj/rcostPrtan~+sinlj/r
-
dp
sinlj/r
2.J2vx ~l-coslj/rcostPrcos~
for
(9.32)
Ij/r>1.1e, tPr>1.6e
e<30deg,Error<lOO/O
and for first-order refraction
~t(2) =~[
r
4.J2vx
C, + sin Ij/r
~1+m2-m~2(1+Cc-C,)~l+Cc-Cs
J
C, -,inV",
dp
2.J2vx
m
sin Ij/r
~l+m2-m~2(l+CJ ~l+Cc
(9.33)
for tane", e
'
with
(9.34)
Using two detectors, like in the phase Doppler technique, the time-shift between the detectors for signals of the same scattering order is linearly related to
the particle diameter by
(9.35)
The negative sign is for uniformity with the phase difference and has already
been explained in section 5.3.4. The time conversion factor Fi N ) and the diame-
9.2 Time-Shift Technique
503
ter conversion factor for the time-shift technique ß~N) relate the measured timeshift to the partide diameter and are system parameter dependent.
Comparing the approximations in Eqs. (9.32) and (9.33) with the approximations in Eqs. (8.2) and (8.3), it can be seen that for special angular regions the
time shift is proportional to the phase shift
41t
(j);N) "" -;-vx sin ~ t~Nl = OJ D t~Nl for
""'b
tan8",,8 {rfJ»O
forN=l
d /\
r
c
(9.36)
'l'r < 60 eg
tanrjJr > 1 lor N = 2
with a proportionality constant equal to the Doppler frequency OJ D= 21tfD of the
signal. This conversion is also valid between the phase difference L1(j)\~1 and
time-shift difference L1tlfl of the same optical configurations. However, this
proportionality does not necessarily mean that the phase difference and the time
shift are equivalent. As explained in section 5.1.3, the phase difference is mainly
caused by separation of the glare points, the separation of the incident points
and the path lengths inside the partide, while the time shift is only caused by
separation of the incident points. Furthermore, Eq. (9.36) is only valid for the
above given restricted angular regions and small intersection angles. As an example, the relative deviation while converting time-shift difference into phase
difference by using Eq. (9.36) for a refractive index of m = 1.3, an intersection
angle of 8= 30 deg and first-order refraction is shown in Fig. 9.7.
Nevertheless, the angular and refractive index dependencies of the time conversion factor are dosely related to that of the phase conversion factor and the
dorninance of one scattering order is the same for the time-shift and for the
phase Doppler technique. Therefore, the angular dependencies and relations
given in section 8.1 and 8.2.1 to 8.2.6 can be approximately applied for the timeshift technique.
1%
45
90
Iß
180
Off-3X is angle ; , [degl
Fig. 9.7. Relative error by converting the time shift into the phase difference by using Eq.
(9.35) (m=1.3, e=30deg , fIrst-order refraction). In the shaded region no geometrical
optics solution for fIrst-order refraction is possible (z'J, > z'JJ
504
9 Further Partide Sizing Methods Based on the Laser Doppler Technique
9.2.1 Time-Shift Technique in Forward Scatter
Typically in forward scatter the phase Doppler technique would be appropriate
for particle sizing. The following examples are presented as an illustration of the
time-shift technique and for comparison purposes to the phase Doppler technique.
For particle motion in the x direction, Eq. (5.258) can be used directly to
compute particle size from the time shift for either reflection (N = 1, Eq. (5.259»
or first-order refraction (N=2, Eq. (5.259» dominated collected light. To attain
aresolution comparable to the phase Doppler technique, higher elevation angles
must be chosen, such that the time shift becomes some significant fraction of the
total signal duration. This becomes more important for particles smaller than
the diameter of the measurement volume. Note that no size ambiguity arises for
larger particles and larger elevation angles, as is the case for phase Doppler with
only two detectors.
Two measurement examples will be presented in the next section to illustrate
the above remarks. In accordance with the above mentioned requirements, the
dimensions of the measurement volume are chosen small (d w = 33!lJll,
Ab =488nm, B=13.7deg) and the elevation angles are large (±10deg::;ljI,
::; ±30deg). Figure 9.8a illustrates a measured pair of signals obtained from a
polystyrol sphere (n = 1.59) of diameter d p = 65 /-lm ± 3 /-lm. From the time shift
of the received signals a displacement of the measurement volume of one third
of the beam waist can be estimated. Using the signal analysis according to sections 6.3 and 6.5.2.2, the frequency is found to be Iv = 580.3 kHz and the
time shift to be L:ltg) = 11.44 /-ls. This corresponds to a particle velocity of
b
a
~ 0. \ - - Receiver \ -------. Receiver 2
~ j:
, ! ~. ~ ::
_h::::::f:~.
j "=n
I' U,
!
c..
t,
E
'"
~
~
0,0
:
I
I~
I' 11 I
J :~ :: :: :: :: :':
" ,I "'1 .. ' I I
$
'
I
I
,
I
"f.nH::i::::"
Vi
0, I Ow...w...I....L.J...J....J...J....J...J....J...J....'-:L.LL-LLJ'-:-'-'L.LJ'-::'SO
Time
Ill'sl
o
20
40
60
80
Parlicl c diamclcr d.
100
Il'ml
Fig. 9.8a,b. Polystyrol sphere in air measured with the time-shift technique
(d p = 65 f..lm ± 31lJll, m = 1.59, Ab = 488 nm, e = 13.7 deg, ~,= 30 deg, ljI, = ±10 deg,
d w = 33 f..lm ). a Signals from the two detectors, b Measured size distribution after passing
the polystyrol sphere through the measurement volume 100 times (counts:100, dass
width: 21lJll, dp = 65.2 f..lm, a dp = 004 f..lill)
9.2 Time-Shift Technique
505
V x = 1.18 m S-1 and a volume displacement of LixpACmax = v x L1tg) = 13.5 flm. Equation (9.33) then yields a size/volume displacement factor of 4.82 for first-order
refraction, using the system parameters no ted in Fig. 9.8. The polystyrol sphere
has a diameter of 65.1 flm according to this measurement. Like in the phase
Doppler technique, these measurements are highly reproducible, as seen in Fig.
9.8b, which shows the measured size distribution after 100 repetitions of the
particle passing through the measurement volume. An overall mean diameter of
65.2 flm with a standard deviation of 0.41 flm was measured.
A second example involves much smaller particles and a comparison to sizes
measured using the phase Doppler technique. The individual distribution functions for particle velocity and particle diameter are shown in Fig. 9.9. These
a
c
.s:
b
1
1
:;
~
·C
;;
'Ö
""0
~
tl
'"
~
""
I
1
o
2
Parliclc vclocil)' v,
0
Im s 'I
10
20
30
Partide diameIer d, 1111111
c
"
.... ...
,'
•••
~~
~
• •
~
"'.-"
h'~"
.' .' .'
I
o
I
10
20
~
,..
3.0
........ ., .'.
' "
.".'.', '
....
"
"
,~
."~"
.... o
jO
• •'
1.5
Partide diameter
•
d , ll1m]
Fig. 9.9a-c. Velocity and size distribution functions of drops generated using an ultrasonic nebulizer and measured using the time-shift technique (m = 1.33, Ab = 488nm,
19=13.7deg, d w =33J.Lm, ~,=30deg, V',=±30deg, counts: 5000). aVelocity distribution function (dass width: 0.06 m S-1, lIx = 2.40 m s-', (]' vx = 0.04 m S-1 ), b Partide diameter distribution function (dass width: 0.6 J.Lm, dp = 6.24 J.Lm, (]' dp = 2.21 J.Lm), c Joint velocity/diameter probability density function
506
9 Further Particle Sizing Methods Based on the Laser Doppler Technique
measurements deviate in the mean average by less than 1% from the phase Doppler measurements. The droplets were generated using an ultrasonic nebulizer
and were significantly smaller than the measurement volume size. In comparisonto the dual-burst technique (section 8.2.4), the time-shift technique can also
measure particles much smaller than the beam diameter. While the dual-burst
technique is based on the time shift between two different scattering orders in
the same signal and the scattering orders cannot be separated for small particles,
the time-shift technique separates the time-shifted signals with the two detectors. Therefore, this procedure requires only one dominant scattering order, as
with the phase Doppler technique.
9.2.2 Time-Shift Technique in Backscatter
For various reasons the phase Doppler technique is not workable in the far
backscatter region. This is most easily seen from Figs. 8.3 and 8.4. Some attempts at exploiting scattered light in the second-order refractive modes were
presented by Bultynck (1998) and Bultynck et al. (1996); however, the absolute
scattering intensity is low and mixing of scattering orders leads to large sizing
errors. Moreover, their instrument design was suitable only for a very restricted
range of relative refractive index. On the other hand, the time-shift technique
offers several possibilities for realizing a particle-sizing instrument in backscatter. In this section some of the fundamental signal dependencies and also possible instrument configurations will be presented.
The situation for the backscatter range is illustrated in Fig. 9.10 in which a
one-dimensional Gaussian intensity distribution is shown for a single incident
beam. A particle moving through the beam in the scattering plane will result,
like in the dual-burst technique (section 8.2.4), in various fractional signals arriving sequentially at the detector, hence the name time-shift technique. The
main components in order of occurrence for m> 1 will be: surface wave or edge
ray (long path), reflection, second-order refraction (inner path), second-order
Ineidenl po inls
uler palh (N
=3.2) ___
_
In"idcnl
shapcd
bcam
Parlid"
posilion
xo,
Fig. 9.10. Scattering orders/modes contributing to the signal in the near backscatter region for m> 1
9.2 Time-Shift Technique
507
refraction (outer path), surface wave or edge ray (short path). Note that there
exist two modes for second-order refraction (N = 3), creating the rainbow (section 4.1.3.3). These have been designated N = 3.1 (inner path) and N = 3.2 (outer
path).
The relative amplitude between each of the fractional signals will depend on
the specific scattering order/mode, and the absolute amplitude scales with the
incident power and particle size. The width and shape of each fractional signal is
given by the width and shape of the incident beam. Basically, the incident beam
is being sampled by the incident points of each scattering order/mode on the
surface of the particle and it is being imaged through the respective glare points
onto the detector. The separation of the fractional signals in time will be determined by the particle size, the relative refractive index, the particle shape and
the scattering angles to the receiver. Overlapping of fractional signals from different scattering orders/mo des in one signal is reduced by keeping the ratio of
the particle diameter to the incident beam width large. For practical applications
this means a highly focused beam should be used, insuring good separation of
the fractional signals even for small particles.
The centers of the virtual images of the measurement volumes for each scattering order/mode lie approximately on the line connecting the intersection
point of the laser beams and the detector direction (see Fig. 5.22). All fractional
signals will only be seen if the particle velo city vector intersects all detection
volumes. Therefore, the measurement volumes and the receivers have to be 10cated in the x-z plane if the main tlow is in x direction. This optical arrangement
corresponds exactly to the planar backscatter phase Doppler arrangement, in
which the detectors lie in the same plane as the incident beams and as illustrated
in Fig. 9.11.
9.2.2.1 Signal Characteristics
A typical signal received at a single detector of the system shown in Fig. 9.11 is
y
Fig. 9.11. Optical arrangement for a time-shift system in backscatter
508
9 Further Particle Sizing Methods Based on the Laser Doppler Technique
b
a
FLi\IT simu lation
Experimenl
SWLP
SWI.P
50
8
Parlide positi n X, lfll11)
c
Time IIJ.lSI
FLi\ IT \~ilh Dcb)'c scrics
dccomposilon for rencction
with Debye scries
N- I
O~LU~~~~~W=~
so
o
50
Part icle posit ion x, 1J.lm I
o
50
Pa rlide position x, lJ.lml
Fig. 9.12a-d. Signal received at the photodetector of a planar phase Doppler system in
backscatter
(d p =80/-Lm,
m=1.333,
19=7.4deg,
lf/,=25deg,
~,=180deg,
Ab = 514.5 nm, fsh = 40 MHz, d w = 20 /-Lm, SWSP: surface wave short path, SWLP: surface
wave long path). a Calculated with FLMT, b Measured, c Reflection from Debye series decomposition, d Second-order refraction from Debye se ries decomposition
illustrated in Fig. 9.12, computed using FLMT and the Debye decomposition of
the FLMT result and measured in the laboratory using a transient recorder to
record the signal.
For small intersection angles the AC and DC parts of the signal coincide (section 5.1.3.1) and the signal consists of the same four distinct fractional signals
corresponding to the scattering orders/modes shown in Fig. 9.12. Note that the
short path surface wave and the refraction mode N = 3.2 overlap almost completely and cannot be individually distinguished.
The dependencies of fractional signal separation are illustrated in Fig. 9.13
using simulations for three different scattering angles in the backscatter range.
These simulations have been computed using FLMT. The separation of the reflected signal fraction from the refractive fraction N = 3.1 decreases with decreasing elevation angle. Furthermore, the second-order refraction (N = 3.2) increases in amplitude for larger elevation angles. Below about If/ r = 14 deg
(m = 1.33), only the N = 3.1 mode contributes to second-order refraction. As expected, the measurement volume displacement and therefore the time shift for
reflection and refraction reduces when the receiver is doser to the y-z plane.
However, in the backscatter configuration the surface waves dearly delineate the
partide borders. The best fractional signal separation is found for If/ r = 20 deg.
9.2 Time-Shift Technique
VI,
509
10 deg
SWLP
VI, = 20 dcg
SWLP
'1',
30 dcg
SWLP
6
8
10
Time I h.ls)
Fig. 9.13. Influence of scattering angle on fractional signal separation for three different
elevation angles (dp=80~m, 9,=180deg, e=4deg, Ab=s14.5nm, J,I,=40MHz,
d w =20 ~m)
For a particle trajectory in the x direction, and if the relative refractive index
of the particle is known, the particle diameter can be measured by measuring the
time shift between selected fractional signals, as in the dual-burst technique
(section 8.2.4). This time shift is transformed into a volume displacement using
the particle velo city in the x direction, found from the Doppler modulation frequency. For smaller particles the fractional signals overlap increasingly and the
estimation of the time shift becomes virtually impossible.
Therefore, an alternative approach is to add a second detector, as shown already in Fig. 9.12. Another two sets oflaser beam images - one for each incident
beam will now be created. In total two laser beam images for every scattering
order and every receiver will exist. Pairs of these images create the measurement
volumes. Assuming the intersection angle
to be small, all measurement volum es lie along the x axis. The situation has been exemplary pictured in Fig. 9.14,
in which the dominating three measurement volumes for each detector lie along
the x axis. Note that the spacing between the volumes depends on particle size,
refractive index ete. and that this pictorial is only an example.
Furthermore, the signal intensity from each volume will vary according to
scattering order. This means that while the measurement volumes for all the
scattering orders/mo des are the same size, the detection volumes will vary according to intensity of the scattered light and the detection criterion used by the
processing electronics. An important feature is that the volumes appear in reverse sequence for each detector because of the symmetric placement of the de-
e
510
9 Further Particle Sizing Methods Based on the Laser Doppler Technique
y
r.leasuremen~ ~
(rece iver J)
Receiver I
(recei ver 2)
Fig. 9.14. Planar optical configuration with separated measurement volumes
Rcceiv r J; 1/1,
-25 deg
"
"'C
::l
:aE
'"
Jf'" ~~~~~~~~~~~~~~~~~~~~~~c=r=~~=c~~
Recc i ver 2:
o
lI'l
25 deg
Time I [flsJ
Fig. 9.15. Simulated signals from two receivers of a plan ar backscatter configuration
(e= 4 deg, A. b = 514.5 nm, J,,, = 40 MHz, d p = 100 J.1m, d w =20 J.1m, (Pr = 180 deg)
tectors about the incident beams, as illustrated by the signals in Fig. 9.15. This
means that the time shift between the two signals from the two receivers can also
be measured for smaller particles, because the shifted signals on the two detectors are now better separated.
The influence of the refractive index on the time-shift signals is illustrated in
Fig.9.16, showing a simulated detector signal for the values m = 1.25 and
m =1.42. As the refractive index increases, the position of the N = 3.1 fractional
signal exhibits a monotonie but non-linear increase of time shift, whereas the
9.2 Time-Shift Technique
a
511
b
.2
"
-0
:::>
Parliclc border
Gcomclricaloplics
C.
E
a
'"
-.;
g
c
~ r++1~~+1~t+~~+1~~
Symbols: FLJ\lT
N= I
o
N :\.I
..
o
Debyc
SWSP .nd (N
10
Timc I [Ilsl
I
3.2)
1.40
Relative rcfracl ive index
/11 [ - )
Fig. 9.16. Change of the signal structure and time shifts due to refractive index changes
(dp=80l-lm, 4J, =180deg, lJI,=20deg, Ab =514.5nm, dw=20l-lm, ! ' h=40MHz)
reflective fractional signal remains unaffected. The time difference between reflection and N = 3.1 can be used for determining refractive index as already discussed in section 8.2.4.1. A diameter change of 5 .. .6 % corresponds to a 0.025
change in m if the surface waves are not considered. Both the amplitude and position of the p = 3.2 fractional signal change with the refractive index, also influencing the short path surface wave signal due to the strong overlap. Note that for
larger particle diameters, all fractional signal dependencies correspond to values
predicted by geometrical optics. These dependencies are shown explicitly in Fig.
9.16b calculated with geometrical optics and Debye decomposition of FLMT results. The surface waves are assumed to be on the circurnference of the particle.
9.2.2.2 Particle Sizing Using the Time-Shift Technique
The possibility of using the time-shift technique for particle sizing in backscatter
will now be investigated quantitatively for the various scattering orders involved. Size information can be extracted by examining the time shift between
signals oflike scattering order/mode at different detectors and, using the particle velocity, converting this to a volume displacement.
The particle diameter can be measured by the time shift of the signal maxima.
For trajectories parallel to the x axis, the time shift is a direct measure for the
measurement volume displacement. For oblique trajectories, the time shift leads
to a systematic error of the volume displacement, as given in section 5.1.3.2
when only the x component of the velo city is used. General expressions for the
time shift are given in Eq. (5.113) for the DC parts and in Eqs. (5.114) to (5.116)
for the AC parts of the signals.
In the region of the beam intersection, the DC pulses are additive and only
one DC amplitude maximum occurs for each scattering order (Fig. 5.20). A
512
9 Further Particle Sizing Methods Based on the Laser Doppler Technique
closed solution for arbitrary interseetion angles is not possible, but for small intersection angles the particle position for maximum amplitude position of the
DC part is equal to the maximum amplitude position of the AC part as mentioned in seetion 5.1.3.1.
For small intersection angles (tan~=~, ~«1 and cos~=1), and therefore small incident point distances (:x r «Xr> Zr «z" see Eqs. (5.101) and
(5.102)), receiver locations far from the direct backscatter (lfIr» 0 deg,
zrmz %« xr) and a planar configuration (ifJr = 180 deg), the signal maxima for
the DC and AC parts occur at
(9.37)
where the particle trajectory is given by Eq. (5.61) and m y , mz> y po' zpo.
By using two detectors, the time shift between the signals becomes independent of the particle trajectory intersection with the plane x = 0 and independent
of the z component of the particle trajectory.
A
(N)
(N)
(N)
At(N) _~_ X max ,1 -X max ,2
12
-
1
-
Vx
Vx
Vx
x: +xi
N)
l+m y
N)
(9.38)
and depends linearly on particle diameter (X~N) - d p , Eqs. (4.79) and (5.101).
The y component must be measured for further corrections with e.g. a twovelocity component laser Doppler system.
For symmetrie receiver locations (lfIl = -lfI2) the volume displacement or
time shift between the signal maxima for reflection (N = 1) and first-order refraction (N = 2) is given as a closed solution for the AC part in Eqs. (9.32) and
(9.33). For the planar configuration (ifJ r = 180 deg) and for the small intersection
angles (sin % = 0, cos % = 1) considered here, the incident points of the two
beams coincide and the time shift for reflection (Eqs. (5.255) and (9.32» simplifies to
(9.39)
The respective simplified scattering geometries are pictured in Fig. 9.17, in
which Bi denotes the angle of incidence and B, is an angle of refraction for the
respective scattering order N.
A normalized displacement or normalized incident point position independent of particle size can be defined by normalizing Eq. (9.39) with the particle radius rp = d p /2
(9.40)
9.2 Time-Shift Technique
a
513
b
x
Z
X 1" .\2l
x !"U)
Fig. 9.17. Definition of normalized incident points. a Reflection, b Second-order refraction
where O\N) and 0~N) are the respective relative displacements for detectors 1 and
2 and scattering order N. The border of the particle in the x direction then corresponds with the coordinates 1 and -1. For reflection, this relation between
normalized volume displacement and receiver location becomes
Oll)
r
= sin ljI
(9.41)
2
and is pictured in Fig. 9.18.
For second-order refraction the incident point shift will depend additionally
on mode (N = 3.1 or N = 3.2) and on the relative refractive index m. The angular
-;-
-~_ 1
; , == 180 deg
-90
o
90
180
Eleva tion angle lfI; Idegl
Fig. 9.18. Normalized displacement of the measurement volume on the x axis for a planar
backscatter configuration in reflection mode and small interseetion angle
514
9 Further Particle Sizing Methods Based on the Laser Doppler Technique
relationship between angle of incident and scattering angle (for the plan ar configuration and a small intersection angle the elevation angle can be approximated by the scattering angle, lfI r = 1.9,) is given in Eq. (4.20) in section 4.1.1.2 for
N=3 as
1.9, = 1t + 2( 8; - 28,) = 1t + 28i
-
4 arCSin( Si:8; )
(9.42)
For a given scattering angle Eq. (9.42) must be solved for Bi iteratively. Solutions are given in Fig. 9.19 for m = 1.33 and m = 1.5 in terms of normalized incident point position as a function of the scattering angle. Note that the N = 3.2
mode appears only for elevation angles IlfIrl>lSdeg for the refractive index
m = 1.33 and that the incident point remains near the periphery of the particle.
For larger relative refractive indexes (m > 1.4) the situation becomes more complex and the number of fractional signals may even reach the number of the
mode N. For instance in Fig. 9.19b a third mode, N = 3.3 can be identified.
Physica1ly, this mode corresponds to the ray designated N = 3.3 in the ray paths
in Fig. 9.19b.
Expressions for the relative displacement of high er scattering orders become
somewhat more complex but can always be solved numerically using an iteration (see section 4.1.1.2).
The particle diameter is found by measuring the velocity v x and the time shift
of the considered scattering order/mode and solving Eq. (9.40) for d p and for
particles moving parallel to the x axis. For other trajectories with vy "* 0, corrections of the time shift must been made by measuring the vy velo city component
and using Eq. (9.38).
For particles moving near the x axis and for small intersection angles, the AC
a
b
AI--==--------'=lO: U1
c:
"
E
"u
..-----------:10:
'"
C.
.~
1)
~ 0
"
.~
-;;
E
o
z
10
20
0
20
40
Eleval ion angle I{/, [d eg[
40
20
0
20
'10
Elcvali on angle I{/, [degl
Fig. 9.19a,b. Normalized volume displacement for second -order refraction (tjJ, = 180 deg,
A. b = 514.5 nm). a m = 1.33, b m = 1.5 and corresponding ray pa ths for 1jI, = 10 deg
9.2 Time-Shift Technique
515
and DC parts of the signal will be coineident and the time shift can be measured
between the signal maxima of the non-filtered bursts. For trajectories suffieiently displaced along the z axis, or for larger intersection angles, the DC part of
each detector signal may exhibit two maxima corresponding to each of the in eident beams (Fig. 5.20 and Eqs. (5.97) and (5.98». The required time shift should
be the time between DC maxima from the same beam glare point on each detector. This is somewhat impractical because the DC part is more susceptible to
narrow band noise sources. A more robust measurement can be achieved by
using the time shift between AC maxima of the two detectors signals (of like
scattering order/mode).
The accuracy and resolution of the time-shift technique will be in part dependent on the expectation and variance of the estimator used to find the AC
part maxima. Note that the estimation procedure must also identify and separate the fractional signals before the estimation of the maxima is performed.
Possibilities for estimating the time shift have been discussed in section 6.5.2.2
and a more detailed discussion can be found in Damaschke et al. (2002).
9.2.2.3 Time Shift / Partic/e Diameter Relation
The response of a particle sizing system using the time-shift technique and the
optical configuration shown in Fig. 9.14 can be investigated with the help of signals generated using the FLMT and signal processing for identifying and isolating the time shifts of the different scattering orders. The results are shown as
solid symbols in Fig. 9.20 for the different fractional signals: surface wave (short
path) and second-order refraction (N = 3.2) (Fig. 9.20a), second-order refraction (N=3.1) (Fig. 9.20b) and reflection (Fig. 9.20c). The simulations were performed for the detector elevation angles IJI r = ±20 deg and for a measurement
volume diameter of 2rw = 2a o = 20 11m.
a
b
c
o
Geometrical optics prediction
Signal processing of complete signal
Signal processing of Debye orders
.......--L.....L.-L......
I...-L....L.....L.....I--'-SO.....L.-L....L.....1...1-'O""'O.L.-J ~
SO-'--L.....1...-.L1 ol...o....L.....J o
I
,
,
,
~o'
, ,
'1 ~o'
I
Expected particle diameter dp [[lm]
Fig. 9.20a-c. Particle size estimates from simulated signals using various fractional signals
and a 20 llJI1 measurement volume diameter (1fI, = ±20 deg, e= 4 deg, Ab = 514.5 nm,
m = 1.33). a Surface wave short path (SWSP) and second-order refraction (N = 3.2),
b Second -order refraction (N = 3.1 ), c Reflection
516
9 Further Particle Sizing Methods Based on the Laser Doppler Technique
A second result is shown in Fig. 9.20 by the solid line. These results were obtained using geometrical optics to compute the position of the incident points of
each order and showaperfect linear relation. The results for the full signals follow closely the linear curves for isolated orders, with small deviations at small
particle sizes.
Finally, Fig. 9.20 includes results shown by the open symbols. In this case the
signal was simulated with the FLMT using only the respective scattering order.
This is possible using the Debye series decomposition in the FLMT computations, as described in seetions 4.1.2.2 and 4.2.2.3. In this simulation, no signal
overlapping occurs for reflected light, by definition, and the result is a perfect
linear relation between size and time shift. Surface waves and the different
modes in a single scattering order cannot be calculated separately using the Debye decomposition and therefore they appear altogether in the calculations for
second-order refraction.
The deviation of the Debye decomposition from the linear relation of geometrical optics in Fig. 9.20b is due to the mixing inside the second-order refraction
between surface waves and different second-order modes. For particle diameters
sm aller than 40/lm no separate maximum for N = 3.1 can be identified with the
signal processing. For the same diameter range, the scatter for N = 3.2 increases
because the interference between all scattering orders results in higher uncertainty of the dominant maximum in the bursts. The calculations confirm that
the scatter in the full-signal results originates from order/mode mixing. Nevertheless, so me systematic trends resulting in a non-linear but monotonie diameter/time-shift dependency can be predicted and considered in converting the
time shift to particle diameter (Fig. 9.20b).
As shown in Eq. (9.40), the time shift is a good approximation for size, independent of the diameter of the incident beam. The best results are achieved for
the surface wave short path and refraction (N = 3.2) and the accuracy increases
for larger particles. For larger beam diameters or smaller particles, the signals
are broader relative to the signal duration and only astronger mixing of orders
occurs. For particle sizes near the focal size of the laser beams or the measurement volume, the scatter in the dominant order (N = 3.2) increases, and for
higher scattering orders with smaller signal amplitudes (N =3.1 and N =1) the
particle diameter limit is already reached, because the maxima can no longer be
identified.
For even smaller particles, the scatter in the dominant mode/order reduces
because the amplitudes of non-dominant orders decrease and the maxima of all
scattering orders are closer together. This is the same as for normal phase Doppler configurations in forward scatter, when using first-order refraction. For
such a configuration, the time shift of the dominant order is not disturbed by
signals from other scattering orders and the technique is limited by the accuracy
of determination of the maximum signal amplitude. This is mainly determined
by the signal-to-noise ratio of the signal. The time-shift technique works for
particle sizes down to 1/10 of the beam diameter quite weIl if only one scattering
order is used (section 9.2.1).
9.3 RainbowRefractometry
517
9.3 Rainbow Refractometry
Rainbow refractometry refers to a measurement technique used to determine
the real part of the refractive index of spherical partieies through analysis of the
primary rainbow scattering. This is of practical interest for the case of liquid
droplets, for which a unique relationship between temperature and refractive
index can be established. Thus, the rainbow refractometer is a nonspectroscopic technique for measuring drop temperature.
To date there have been two instrument implementations realized for practical measurements in sprays. One integrates the rainbow refractometer/thermometer into an existing phase Doppler system, thus providing also size
and velocity data of each droplet (Sankar et al. 1993). The second concept has
been termed a single-beam velocimeter based on rainbow-interferometry and is
a particle counting technique, providing also size and velo city information (van
Beeck and Riethmuller 1996a, 1996b). Commercial distribution ofthe technique
has been very limited, no doubt due both to its complexity and its sensitivity to
the non-sphericity of the droplets and to refractive index inhomgeneities within
the droplet (Massoli 1998).
The rainbow phenomenon has been discussed in sections 4.1.1.3 and 4.1.3.3,
both in terms of geometrical optics and using the Lorenz-Mie theory. The scattering intensity displays a maximum intensity and interference pattern in the
angular region of the rainbow and this is physieally related to the fact that many
rays entering the particle at different incident points exit with approximately the
same angle. Depending on the number of internal reflections, one speaks of
primary (p = 2) secondary (p = 3) or even higher order rainbows. Nussensveig
(1979) has given an excellent description of rainbows and their characteristics.
Rainbow refractometry utilizes the primary rainbow and its detailed structure, as computed using LMT and shown in Fig. 9.21 for a water droplet of diameter 300 JlIll. There is a main maximum peak at the scattering angle 131' followed by supernumerary bows generated by the second-order refraction.
Superimposed on this structure are higher frequency ripples. The main maximum and the supernumerary bows together are referred to as the Airy rainbow
pattern, although the Airy theory (Airy 1838) is not exact and does not account
for the ripple structure.
Van Beeck and Riethmuller (l996b) give a very illustrative interpretation of
the rainbow scattering pattern based on geometrieal optics and the spectrum of
the scattering intensity oscillations over scattering angle. Their illustrations are
reproduced in Fig. 9.22. Each of the peaks in the spectrum corresponds to interference between two geometrie rays, whereby the respective glare point separations, (6\ to 6 s ) can be interpreted in the sense of Young's classieal double slit
experiment, yielding the spatial frequency (see also section 8.4)
/; =
~j
Ab
1t
180deg
-d
(9.43)
P
1\: Rays arising from internal reflection (p = 2) at aseparation distance 6\
leading to the Airy fringe pattern
and
518
9 Further Particle Sizing Methods Based on the Laser Doppler Technique
Lorcnz-M ic solulion
ccond-o rdcr rcfra":lion (p - 3)
]
..
~
~
Inßc":lion
poin l
140
135
Scal lcri ng angle
Fig. 9.21. The rainbow according to LMT and second-order refraction from Debye-series
decompostion for a 300 llID water droplet (Ab = 488 nm, m = 1.333, XM = 1931.3, perpendicular polarization)
....,. 8 rr----.--,-..,--,---,-----,--,--
..'"
15,
Lorcnz-Mic calcu lalion
Second-order rcfraCl io n (p - 3)
Inlcrfcrc n..:c ofrcncCl ion (p - 1)
and sccond-o rdcr rcfracl io n (p -. )
4
15,
0 ~~~~~~=I~~~~~~~==~~
o
5
10
15
Angula r frcqucn..:y of lobcs
IR' Idcg 'I
Fig. 9.22. Rays contributing to the primary rainbow and the rainbow spectrum genera ted
by the interference of rays from reflection, second-order refraction and surface waves
(300f,.lm, A b =488nm, m=1.333, angular region used for calculating the spectrum:
tJ, = l39...144.1 deg)
9.3 Rainbow Refractometry
519
f2: Inner partial ray from second-order refraction and ray from reflection with
separation 8 2
f3: Outer partial ray from second-order refraction and ray from reflection with
separation 8 3
The relation fl = f3 - f2 holds and the latter two contributions lead to the ripple
structure. Further contributions from the edge rays (f4' 8 4 and f5' 8 5 ) are very
weak and of no significance for practical rainbow measurement systems.
To realize a measurement instrument it is necessary to relate these measurable spatial frequencies and the rainbow position to the size and refractive index
of the particle. An exact computation of these dependencies using Lorenz-Mie
theory and Lorenz-Mie theory with Debye series decomposition is shown
graphically in Figs. 4.26 and 4.28 in section 4.1.3.3, where their origin and computation are discussed in detail. The refractive index deterrnines mainly the angular position of the rainbow, as can be seen in Figs. 4.28 and 4.33. The particle
diameter influences the angular frequency of the intensity maxima, as already
expected from Eq. (9.43) . The Airy theory (section 4.1.1.3) predicts a size and
refractive index dependence of both the frequency and the position of the main
maximum.
For the determination of the refractive index, the position of the rainbow
should not change with particle diameter. This is not the case for the first maximum of the rainbow as can be seen in Fig. 4.26 computed for a constant refractive index. Recently, Roth et al. (1996) have shown that the position of the inflection point of the main rainbow peak, indicated in Fig. 9.21, is virtually size
independent. In fact, this position corresponds closely to the position of the
rainbow established by Rene Descartes (1637). This inflection point position has
recently been used in a measurement instrument to determine refractive index
(V an Beeck et al. 2000).
Another approach to measure refractive index is to combine a measurement
of the rainbow position (13 1 ) and rainbow frequency (fl) with a conventional
phase Doppler instrument, which yields independently the droplet size.
Using this strategy of size determination with a phase Doppler instrument
and refractive index determination from the rainbow pattern, Sankar et al.
(1993) have realized the measurement system shown schematically in Fig. 9.23.
The rainbow receiver images the rainbow pattern through a cylindricallens onto
a high-speed, high-resolution CCD array. One photomultiplier monitors the received light for gating purposes and synchronization with the phase Doppler acquisition. A second photomultiplier monitors signal intensity to control the
CCD.
The rainbow angle is quite insensitive to the position of the particle in a
Gaussian beam. Nevertheless, in the instrument of Sankar et al. (1993), the beam
for the rainbow refractometer was made larger than the phase Doppler beams in
the measurement volume by a factor of about 2, since the requirement of total
particle illumination was found to be more stringent in the case of rainbow refractometry than with the phase Doppler sizing. A calibration of the instrument
was used to establish linearity of the CCD pixel values with the scattering angle
and linearity of the rainbow angle with refractive index. An evaluation of the
520
9 Further Particle Sizing Methods Based on the Laser Doppler Technique
Fig. 9.23. Schematic of an integrated phase Doppler/rainbow refractometry instrument
(adapted from Sankar et al. 1993)
achievable accuracy of this instrument has been given in Heukelbach et al.
(1998), Heukelbach (1998), Damaschke et al. (1998) and Horn (2000).
They show also a predictable sensitivity of the measured refractive index to
the trajectory of the particle in the z direction by using monodisperse droplets.
This corresponds to the simple geometric change of receiver angle over the
length of the measurement volume and amounts to a variation in the refractive
index m of approximately 0.1 %. At the far extremes of the measurement volume,
the particle trajectories lead to larger measurement errors, associated with the
effect of the receiver slit aperture on the collected scattered light.
However, the presence of the ripple structure leads to uncertainties in locating the angle of the main rainbow peak, especially for smaller particles. For instance, for a 10 11m water droplet, the ripple structure amplitude reaches 30% of
the main peak. One solution, proposed by Roth et al. (1991), is to applyan appropriate low-pass filter and a second approach, adopted by Sankar et al. (1993)
for a commercial instrument, is to curve fit the primary fringe of the rainbow.
Nevertheless, the accuracy of the refractive index measurement of small spherical particles is mainly limited by the uncertainty in peak detection, caused by the
ripple structure (Heukelbach 1998).
Already in 1980, Marsten recognized that the angular dependence of the rainbow was quite sensitive to the shape of the drop. Practical applications were seen
in detecting micron amplitude changes in the shape of millimeter diameter
drops. In the same vein, non-sphericity quickly leads to size and especially refractive index errors using the rainbow technique. Van Beeck and Riethmuller
(1995) propose a sphericity validation based on a comparison of the diameter
found by the supernumerary bows with the diameter found from the ripple frequency. In principle this should be quite effective, since the optical interference
patterns employed originate from different local curvatures of the droplet sur-
9.3 Rainbow Refractometry
521
face. However van Beeck (1997) demonstrates that this condition is not sufficient.
More recently van Beeck et al. (2000) have proposed the global rainbow thermometry (GRT), which superimposes the rainbow pattern of many individual
particles onto the image. This technique yields the average size and temperature
of a particle ensemble. The non-spherical droplets and liquid ligaments result in
a uniform background and thus do not influence the interference pattern. Even
with perfectly spherical droplets sm all variations in droplet size lead to a vanishing of the ripple structure.
Van Beeck and Riethmuller (1995) recognized that the frequency f2 was quite
insensitive to refractive index. Therefore, both size and refractive index can be
measured using scattered light from a single beam. As a measure of the frequency, they used the angular separation between the main peak and the next
peak (tJ 2 - tJ I) and gave a relation for the diameter as
d
. =~ (
p,A"y
4
COSTRB
• 3
Sin T'RB
1/2( 2.37959 180deg J312
J
.0.0
U 2 - U1
'
1t
.~
=~~-3-
SIll 7' RB
(9.44)
The position of the main maximum is then given by Airy theory to be
tJ
I
=ItJ
RB
I+ 1.08728
.
SIll T' RB
[
A.~ COST RB )
2
16 dp
113
180deg
(9.45)
1t
The dependency on the refractive index lies mainly in the geometrie rainbow
angle and must be solved implicitly from this equation. The result is that both
diameter and refractive index can be obtained from the scattered light of a single
beam. Similar algorithms were used by Roth et al. (1991) and Sankar et al. (1996)
in an improved version of the integrated phase Doppler/rainbow refractometer
presented in Fig. 9.23. The achievable accuracy using the Airy theory (Eqs. (9.44)
and (9.45» can be checked by Lorenz-Mie computations with Debye series decompostion, as demonstrated in Fig. 9.24. As shown in section 4.1.2.2 the Debye
series decompostion of the Lorenz-Mie result can be interpreted as scattering
orders. For second-order refraction alone, the smooth curve in Fig. 9.21 gives
the exact positions of the first main maximum and supernumerary bows. The
refractive index determination from Eqs. (9.44) and (9.45) based on Airy theory
can now be applied to such curves. As seen in Fig. 9.24a, the Airy theory yields
satisfactory results down to particle diameters of 50l1m (at m = 1.33). Heukelbach (1998) used an interpolated lookup table of the second-order maxima
based on Lorenz-Mie calculations with Debye series decompostion and could
extend this to 20l1m (Fig. 9.24b). Important to note is that these methods are
based on the rainbow intensity distribution without ripple structure for aperfect
spherical particle. In areal rainbow signal the ripple structure prevents the exact
determination of the rainbow maxima and reduces the accuracy by at least one
order of magnitude. One solution is to illurninate only the incident points of
second-order refraction with a shaped beam, but this is impracticable in most
cases.
522
9 Further Particle Sizing Methods Based on the Laser Doppler Technique
b
a
~ 1.3 32 r-r-'-"-'-""I-"-"""-"-"""-"-"""
Ir-.-,...,
E
•
><
"
"Cl
•
Reconstructed refractive index
using Airy theory
•
.5
•
~
'.;::J
Jlu
.
1.330 I - .-.-...........:-•.....,..--.
_ _-
~
Recons~ructed refractivel index
using LMT theorywith Debye
series decompostion
.
......
-_---l
.....
•
-
1.328
Expected refractive index
•
0
(m
I
200
co
-
-
-
1.330)
I
400
0
Particle diameter dp [flm]
I
I
200
400
Particle diameter dp [flm]
Fig. 9.24a,b. Predicted refractive index from the primary rainbow pattern (Ab = 488 nm).
a Using Airy theory, b Using Lorenz-Mie Theorywith Debye series decompostion
Still further information about the partide size is contained in the ripple frequency. Anders et al. (1993) found that the angular spacing of the ripple structure (LllJ R ) could be fit very weIl to an expression oithe form
C
LllJ =C +_1
(9.46)
Rad
p
where Co and CI are constants, depending on the refractive index. Van Beeck
(1997) gives an equivalent expression
!,;PPle
=
:lb
(COST RB
+cos lJ;B ) 180:eg ,
f2
=
fr;pple -
~
, f3
=
fr;pple
+
~
(9.47)
which establishes a linear relation between droplet diameter and the spatial frequencies. The dependency on refractive index is weak, thus it can be used for a
preliminary estimate of drop diameter.
This discussion indicates that there are several avenues to determine size and
refractive index of droplets using only one illuminating beam. However, the velocity is also important and such an approach, without reverting to a laser Doppler based system, has been demonstrated by Van Beeck and Riethmuller
(1996b). The optical arrangement used is pictured in Fig. 9.25. This system overcomes the problem of the finite integration time of the CCD array, which causes
the ripple structure to disappear, by using a photomultiplier instead.
As a droplet moves through the illuminating beam, the rainbow pattern
moves across the first lens and is imaged onto the photomultiplier. The pinhole
1 acts as a spatial filter to limit the observed section of the measurement volume.
Pinhole 2 determines the angular resolution of the system. The virtual measurement plane is adjusted through the second lens to lie dose to the measurement volume in order to capture a large angular portion of the rainbow, at least
9.4 Shadow Doppler Technique
523
Lcns
,,
,,
: Rainbow
:image plane
Beam adju I mcnl
!\Iirror
I
Laser
Fig. 9.25. Optical arrangement for measuring size, velocity and refractive index of droplets using one illuminating beam and one photomultiplier (adapted from van Beeck and
Riethmuller 1996)
the first two Airy fringes. A wire is placed in the center of pinhole 1, thus the
signal should fall to zero when the droplet image coincides with the wire position, which is true except for diffractive effects. If a geometric 'shadow' is considered, the velo city of the particle can be expressed as
(9.48)
where d wire is the diameter of the wire, L1t wire is the time it takes for the image of
the droplet to pass the wire and ß is the magnification factor. This velo city estimate is size and shape independent.
Once the velocity is known, the relations given above relating size and refractive index to spatial frequencies can be converted to relations in terms of temporal frequencies. Details can be found in van Beeck and Riethmuller
(1996a,1996b) or van Beeck (1997).
One final remark is directed towards the use of rainbow refractometry for
determining temperature. A relation between refractive index and temperature
is required and this is not always linear for liquids over large temperature
ranges. An example is given in Fig. 9.26 for water (Thormälen et al. 1985).
9.4 Shadow Doppler Technique
The shadow Doppler velocimeter (SDV) is a combination of a particle imaging
technique and the laser Doppler technique and provides particle velocity and
size simultaneously. The technique is applicable for sizing irregular, nonhomogeneous particles. The technique was first introduced by Hardalupas et al.
(1993, 1994) and refined processing algorithms were presented in Morikita et al.
(1994). Since then, several publications have documented the instrument's performance in sizing pulverized coal (Maeda et al. 1997) and paint sprays
(Morikita and Taylor 1998).
524
9 Further Particle Sizing Methods Based on the Laser Doppler Technique
o
Water
'"
.,><
-:.- 1..1.15
"C
c:
'"
.~
ti
,~
'-'
1.330
e:::
1.325
1.320 L....-....I....---'_-'---'-_.l---'-_.l..-....L.---'L....-....I....---'_-'---'-_.l---'-_.l..--'----''--....L..--'
o
50
100
Tempcrature T ["Cl
Fig. 9.26. Dependence of refractive index on temperature for water, (,1 = 514 nm,
p=l bar)
The optical arrangement of the shadow Doppler velocimeter and also its operating principle is shown in Fig. 9.27. The particle in the measurement volume
is illuminated by the two laser beams from the transmitting unit of a conventionallaser Doppler instrument and the image, used for obtaining size information, is a direct projection (or shadow) ofthe particle shape onto the observation
plane. The photodiode array is placed at this observation plane. As the particle
moves through the measurement volume, the shadow image passes over the
photodiode array. The instantaneous output signals from the segments of the
photodiode array provide a one-dimensional slice of the particle cross-section,
which is read out at high speed and can be converted to 2 bit information in
hardware, representing the light/dark part of the shadow. The two-dimensional
Bragg ccll
partidc motion
Fig. 9.27. The optical arrangement of the shadow Doppler velocimeter
9.4 Shadow Doppler Technique
525
particle image is reconstructed from successive readings from the array, employing the particle velo city to scale the dimension in the plane of the beams.
The velo city of the particle is obtained from the frequency of the Doppler signal,
as with a conventionallaser Doppler system. For this, the Doppler signal pro cessor is fully synchronized with the readout of the photodiode array. With this
optical arrangement, transparent and optically inhomogeneous particles provide almost identical shadows. In principle, glare points or diffraction fringes
might be expected; however, these are negligibly small due to the spatial averaging caused by the finite size of the detectors and the aberration of the lenses.
With the present state-of-the-art, a 35 channel linear diode (Hamamatsu
S.4114-35) is used as an image detector, whereby only 32 segments are activated.
A readout of the diode array at 20 MHz translates into a processing rate of about
10 particlesls. The dynamic range of particle size is about 12, so that a magnification of 230 corresponds to a size range of about 10 /llll to 120 flm . All of these
specifications can be expected to improve rapidly when new hardware components become available. Clearly however, the instrument will always display
limitations regarding measurable concentration, since it is a forward scattering,
amplitude-based technique and thereby more susceptible to obscuration than
the phase Doppler technique. Furthermore, multiple particle images will lead to
erroneous results. First estimates of measurable number density is given in
Morikita and Taylor (1998) as 1000 droplets/cm-3 in the case of droplets with
an average size of 20 flm.
The signal and data processing of the SDV must account for at least two additional effects not yet mentioned in the above description. One is the out-offocus problem and the other is a size distribution bias due to image truncation
by the photodiode array. The out-of-focus effect is illustrated in Fig. 9.28, in
which idealized (2 bit) detector signals are shown for two different particle trajectories through the measurement volume. This figure indicates that from a 2
bit signal, the two separate images from the two laser beams are identifiable and
IUuminaied
Trajeelor ies
Output signal for the indicated
photodiode:
Trajcelory A:
Beam2
11
U
Shadow at the deteetor (diode array) plane:
A: in foeus
D(A)=O
Pholodiodes
,
e•
,
•
-limc
lIajcclory B:
B: ou 1 of foeus
u
""
D(B)
,
•
~
B
~-----------------+
Fig. 9.28. Trajectory dependenee of shadow images and resulting photodiode signal
526
9 Further Particle Sizing Methods Based on the Laser Doppler Technique
separable. Using a suitably low trigger ensures that only when the images exhibit
an overlap will the data be processed, thus defining a maximum tolerable defocus distance.
The active defocus distance Z def is given by
D
=---
Z
def
2tane
(9.49)
where D is the measured distance between out-of-focus shadows. The value of
Zdef can be used as validation criterion. A minimum shape correlation between
the two images can also be included as a validation criterion. The horizontal
shape displacement can even provide information about the second velocity
component perpendicular to the optical axis of the diode array.
The equivalent particle size based on the average area of the projected shadows is computed using
(9.50)
where SH and SL are defined in Fig. 9.21
Generally, the center diode array segment is used for triggering. If the particle
is small, the probability that it will not trigger an acquisition increases. If the
particle is large, the prob ability that a portion of the shadow image will be truncated at the edges of the photodiode array increases. The measured particle size
distribution must, therefore, be corrected for these detection/rejection probabilities. Further details can be found in Morikita et al. (1994).
PART 111
DATA PROCESSING
530
10 Fundamentals ofData Processing
in particular, for g(x) = x, the mean value of x(k) is obtained by
E[x(k)]=,ux = fXP(x)dx
(10.8)
and for g(x) = x 2 , the mean square value of x(k) is obtained by
(10.9)
The quantities defined in Eqs. (10.8) and (10.9) are also known as the first and
second moments of the random variable x(k). However, often the variance of
x(k),
is used rather than the mean square value,
0";,
f(X -,ux
=
= If/ 2x -
0" 2x
,ux2
=
)2
p(x) dx
(10.10)
The standard deviation O"x of x(k) is the square root of the variance. Equation
(10.10) is one example ofthe more general r th order central moment
,ur = f (x -,uJ p(x) dx
(10.11)
which quantifies deviations of x(k) about its mean value.
Similar expressions can be written for the bivariate case, in which two random variables x(k) and y(k) are considered. The joint prob ability function is
defined by
P(x,y)
= Prob[ x(k)::; xand y(k)::; y]
(10.12)
and the associated joint prob ability density function by
. (prob[x<X(k)::;X+LlX and y<y(k)::;Y+LlY])
p(x,y) = lim
dx-->O
LlxLly
(10.13)
dy-->O
yielding also
p(x,y) ~ 0
(10.14)
f f p(x,y) dxdy
y x
P(x,y) = f
fp(~,1])d~d1],
=1
d 2P(x,y) _ (
)
dxdy - P x,y
(10.15)
(10.16)
The two random variables are said to be statistically independent if
p(x,y) = p(x)p(y)
(10.17)
10.1 Sta tistical Principles
531
The expected value of any real, single-valued, continuous function g(x,y) of
two random variables x(k) and y(k) is given by
E[g(x,y)] =
JJg(x,y) p(x,y)dxdy
(10.18)
One special example is when g(x,y) = [x(k) -,lLx J[y(k) -,lLy]' where ,lLx and ,lL y
are the respective mean values. The expected value is known as the covariance
function
Cxy =E[(x(k)-,lLJ(y(k)-,lLy)]
= E[ x(k) y(k)] - E[ x(k)]E[y(k)]
=
(10.19)
JJ(x(k)- ,lLx)(y(k)-,lLy )P(x,y)dxdy
The correlation coefficient is then defined by
(10.20)
and lies between -1 and + 1.
Data processing with the laser Doppler and phase Doppler techniques deals
with the estimation of relevant flow properties from the primary measurement
quantities. The term estimation, rather than determination or computation, is
used, since in almost all cases, the physical process has a stochastic part, meaning that the result of an estimation is a random variable (even an exact replication of the experiment would yield a slightly different answer). The procedure or
computational algorithm used to obtain the estimation is known as the estimator.
Estimators are evaluated on the basis of three properties. First, the expected
value of the estimation should be equal to the parameter being estimated
(10.21)
If this is true, the estimator is unbiased. Note that an estimator is often signified
by the hat symbol. Second, the mean square error of the estimator should be
smaller than for any other possible estimator.
(10.22)
In this case the estimator ~1 is said to be efficient. Finally, the estimate should
converge to the parameter being estimated for a large sampie number or for a
long observation time.
H~prob[(~- f/J) 2 c] = 0
(10.23)
532
10 Fundamentals ofData Processing
For an arbitrarily sm all c > 0, the estimator is said to be consistent. A sufficient
condition to meet this requirement is
(10.24)
The mean square error used above can be expanded to yield
E[(~- 9)2J= E[(~- E[~] + E[~] - 9)2 ]
=
E[(~- E[~]fJ + E[(E[~] - 9fJ
(10.25)
Hence, the mean square error is the sum of two parts: the first part is a variance
term that describes the random part of the error
(10.26)
which can be made arbitrarily small by increasing the sampIe size. The second
part is the square of a bias term describing the systematic portion of the error
(10.27)
This part is not influenced directly by the sampIe size and can arise from many
sourees, often found outside of the data processing. For example, if the intersection angle of a laser Doppler system is improperly measured, a systematic error
of all velo city related quantities would result. Often special calibration pro cedures are required to quantify such errors; however, these will not be considered
further in this chapter. In fact, the bias error will be assumed to be negligible in
the following discussion.
Under these conditions and for a small normalized random error
a[~] ~var[~]
c=--=---'-----
9
(10.28)
9
the probability density function for the estimates, p[~l, can often be approximated by a Gaussian distribution with the mean value E[~l = ljJ and a standard
deviation O"[~l = t:I/J
p9
A
()
=
1
[-(~-9r)
c9~ exp 2{c9)
2
(10.29)
Prob ability statements about the bounds in which future estimates ~ willlie
can thus be made as follows
10.2 Stationary Random Processes
533
Prob[ q>(1- &):::; ~ < q>(l+ &)] "" 0.68
(10.30)
Prob[ q>(1- 2&):::; ~ < q>(1 + 2&)] "" 0.95
since for a Gaussian distribution ±a or ±2 a about the mean contains respectively 68 % or 95 % of the probability mass, as sketched in Fig. 1O.l.
This leads directly to the concept of confidence intervals, i.e. the interval in
which the true value williie with a given probability (valid for small E).
~(1-&):::;q>:::;~(1+&)
with 68% confidence
~(1- 2&):::; q>:::; ~l+ 2&)
with 95% confidence
(10.31)
The value of & can be estimated directly from the sampled data, as is discussed
in the next section.
a
p($) ~
0.4
" '- - - - - - -03989-+-- - - -
0.3
\- - - - - -0.2420
0.2
0.1
0.1585
- 20
•
o
Fig. 10.1. Gaussian (normal) distribution illustrating confidence limits. a For ±a (68%),
b For ±2a (95%)
10.2 Stationary Random Processes
Given so me random phenomena, such as a turbulent flow field, any single time
history of this function is called a sampie function. The collection of all possible
sampie functions, possibly an infinite number, is known as a random process or
stochastic process.
The mean value (first moment) of the ensemble of sampie functions at time tj
is then the arithmetic mean over the instantaneous values of the sampie functions at time tl' as illustrated in Fig. 10.2. A correlation or joint moment of the
process at two different times can be computed by taking the ensemble average
534
10 Fundamentals ofData Processing
Timet
Fig. 10.2. Ensemble of sampie functions defming a random process
of the product of instantaneous values at two times t 1 and t 1 + -r. These values
can be written as
(10.32)
(10.33)
R xx is known as the autocorrelation function.
A random process is known as weakly stationary when the value defined by
Eq. (10.32) is independent of t1 and the autocorrelation is only a function -r. The
process is known as strongly stationary when the autocorrelation is also independent of t1 • Otherwise the process is instationary. For stationary random processes, the autocorrelation is only a function of -r.
Generally, however, statistics of a stationary random process are not computed over an ensemble of sampie functions hut over a time average. For exampIe,
1
f1x (k)
=limf x k (t)dt = f1x
T~~T
T
(10.34)
0
(10.35)
Ifthese values do not differ from those in Eqs. (10.32) and (10.33), then the process is said to he ergo die, in which case the index k is dropped. All stationary
processes encountered in fluid mechanics can be considered ergodic.
10.3 Estimator Expectation and Variance
535
Note that the covariance function is simply the autocorrelation function with
the mean removed and the cross-covariance function is the cross-correlation
function with the product of the me ans removed.
Cxx (r) = R xx (r) - 11~
Cxy (r) = R xy (r)-
I1
x
l1 y
(10.36)
10.3 Estimator Expectation and Variance
In many cases the expectation and variance of an estimator can be derived analyticallyand several examples are given below. For more complicated quantities,
this is not always possible and other strategies can be followed. The jackknife algorithm will be introduced as one such approach.
10.3.1
Estimators for the Mean
The first estimator to be examined is the mean value. The most common sampIe
mean estimator is given by
(10.37)
where x; are individual sampIes of the process x. This estimator is non-biased,
since E[x] = x (Bendat and Piersol 1986). The mean square error, or variance,
of this estimator is then given by
I1
var[x] =
O"i = E[(X - I1S]
(10.38)
Substituting Eq. (10.37) into (10.38) leads to
(10.39)
If the condition E[x; x j 1= 0 is satisfied, i.e. consecutive sampIes are uncorrelated
or statistically independent, Eq. (10.39) can be further reduced to
(10.40)
N
which states that the variance of the mean. estimator decreases with increasing
number of sampIes.
536
10 Fundamentals ofData Processing
This analysis has been performed for an estimator based on discrete sampies
x;; however, a similar analysis could be made for a mean estimator based on the
continuous signal x(t)
1T
J
(10.41)
fix = - x(t)dt
Ta
which differs from the true mean I1x' since the integral is performed only over a
finite time T. The variance of this estimator becomes
(10.42)
In terms of the autocovariance function, this can be written as (Bendat and Pier-
sol 1985 ch. 8.2)
(52
",
=.!.T JT(I_ El
)C
T
(r) d r
xx
(10.43)
-T
for a stationary random process. For small r only C xx remains in the integral
and for large r, Cxx goes to zero, thus the integral can be expressed in terms of
the integral time scale Tx ' as defined in section 7.1.1.2
(10.44)
with
(10.45)
As pointed out by George (1978), if the results given by Eqs. (10.40) and
(10.44) are equated, the condition for statistically independent sampies can be
obtained, namely
N=~
2Tx
(10.46)
This is graphically represented in Fig. 10.3 and leads to two very insightful interpretations
• Sampies are statistically independent if they are separated by aperiod of the
least 2 Tx in time.
• Segments of the continuous signal 2 Tx in length contribute to the mean estimate as one, statistically independent sam pie.
The manifestation of this relation is that sampling a signal with time intervals
less than 2 Tx will not accelerate the convergence of the mean estimator. At this
point, the difference between data and information should become very dear.
New information (with respect to the mean estimate), comes only every 2Tx
time periods!
10.3 Estimator Expectation and Variance
537
xCI)
2T,
2T,
2T,
Timet
Fig. 10.3. Graphical interpretation of statistical independence of consecutive sampies of a
continuous process
In section 7.1.2.2 the term data density for the laser Doppler technique was
introduced, meaning the number of detected particles per integral time scale, or
N
-L1tl
D -
(10.47)
p
where L1t p is the mean (inter-arrival) time between particles. It is the data density, not the data rate, which determines how weH turbulent fluctuations of a
flow field can be resolved in time using the laser Doppler technique.
Equation (10.44) makes a statement about the necessary observation or
measurement time to achieve a given statistical uncertainty (variance of the
mean estimator). However, to use this equation the integral time seale, as defined using the autocovariance function, must be known beforehand. Moreover,
the integral time scale may change by orders of magnitude between different
points of a single velo city profIle. Often, however, a simple estimate of Tx suffices. This will be illustrated with the foHowing example of how Eq. (10.44) can
be used in practice.
The example chosen is a velocity measurement in the recireulation zone of a
baekward facing step water flow. In a preliminary measurement the loeal varianee of the velocity fluetuations is estimated to be 0.2 m "S-" at point A
(Fig. 10.4). The requirement is that the mean velocity at point A be deterrnined
to within ±0.04 m S-1 with 95% confidenee.
The integral time scale of the velo city fluctuations can be estimated from appropriate velocity and length scales, in this case U 0 = 2 m S-1 and x R ' whieh is
H=5em
x
x . "' 0.4 m
Fig. 10.4. Sketch of example backward facing step flow.
length
XR
is the mean reattachment
538
10 Fundamentals ofData Processing
approximately SH or 0.4 m. Thus, T" = X R / U 0 = 0.2 s. Note that the subscript
u for the integral time scale is used, since the process being measured is the velocity u. Assuming a normal distribution for the scatter of the estimates, the
probability of being within ±O"u of the true mean value would be about 68%.
This would increase to the required 95% for ±20"u.
2 o"u
O"~
= 0.04,
= 0.0004.
(10.48)
Equation (10.44) can now be solved for the required measurement time to fulfil
this condition
T=
20"2 T
u
O"~u
u
=
200 s
(10.49)
Note that this calculation has been performed independent of the choice of
measurement technique. In fact, no measurement technique can shorten the
necessary observation time given in Eq. (10.49), since this describes the fundamental statistical behavior of a random process.
In practice, it is unusual to make such calculations prior to every measurement. It is more convenient to display the current measured mean velocity online, accumulated over all sampies up to that time, and then to allow the user to
terminate the measurement when the fluctuations of the mean are below an acceptable level. Indeed, from the necessary measurement duration, and from the
fluctuation level of the mean, a rough estimate of the integral time scale can often be made. This technique of user intervention does not lend itself to automation, so that still a third approach is often used, in which a fixed number of sampIes is used for each point, whereby the number is chosen very large, to ensure
sufficient convergence for all measurement points. In many flows there are regions, where data rates decrease dramatically, e.g. near walls. In such cases there
is often no choice but to accept a high er degree of statistical uncertainty, since
otherwise the data collection time becomes exorbitant.
Alternatively, Eq. (10.40) could have been used if the velocity data were available in discrete form at regular time intervals. Assuming the sampie rate was not
faster than every 2Tu ' the number of sampies required to insure the requested
accuracy would be
O"~
0.2
N=-=--=500
O"~
0.0004
(10.50)
This discussion puts into perspective expressions like 'high' or 'low' data
rates or 'many' or 'few' sampies. The data rate, or the number of sam pIes, must
always be considered with respect to the integral time scale of the process at the
particular measurement point. This explains the preferred use of data density
rather than data rate. It should also be apparent that for the same Reynolds
number, measurements performed in air flows will typically be much shorter in
duration than in water flows, given the same target accuracy. The reason for this
lies in the fact that for the same Reynolds number, the integral time scale of an
air flow is generally shorter.
10.3 Estimator Expectation and Variance
539
Further guidelines for reporting measurement uncertainties can be found in
Kline and McClintock (1953), Kline (1985) or Moffat (1985,1988).
In the particular case of laser Doppler measurements, the velocity sampling
function is determined by the presence of tracer particles in the measurement
volume. Thus the velocity sampies are not regularly spaced in time. Furthermore, the particle density is usually high enough, such that consecutive velocity
sampies are correlated with one another, i.e. not statistically independent. Thus
Eq. (10.40) cannot be used to estimate uncertainty of the mean estimate. Rather
Eq. (10.44) must be used, meaning the integral time scale must be estimated
prior to the measurement, as was illustrated in the above example of the backward facing step flow.
The situation is somewhat more subtle if, for instance, the mean particle diameter is to be estimated from an ensemble of individual particle diameter
measurements performed with a phase Doppler instrument. This is not a continuous process and, therefore, there can exist differences between the time
mean and the ensemble mean diameter. Here it is important to first establish
whether there is any correlation between consecutive sampies. In a spray for example, the atomization process may lead to several consecutive droplets of
similar size, whereas in a large spray dryer, such a correlation between droplets
may be completely lost. Such a correlation is necessary to investigate in order to
establish whether an integral time scale for the process exists or is zero. The case
of a zero integral time scale is simply the case of statistical independence between sampies (Markov process) and then Eq. (10.40) applies. The correlation
between consecutive sampies cannot be estimated from length and velo city
scales but must be estimated directly using a preliminary measurement and Eq.
(10.33). This integral time scale (Eq. (7.31) can then be used with Eq. (10.44) to
estimate the uncertainty in the mean diameter estimate.
10.3.2 Estimators for Higher Order Correlations
In the study of turbulence, statistics of not only the mean velo city but also of
higher order moments are required, as outlined in section 7.1.1. General formula
for the estimator variance for higher order statistics have been given by Stuart
and Ord (1994) and Kendall and Stuart (1958). Benedict and Gould (1996) have
summarized their results in the following manner.
An unbiased estimator1 ofthe r th central moment f.1 r (Eq. (10.11» is given by
1
N
_
mr = - ~)x; -x)
N ;~l
r
(10.51)
in which the true mean has been replaced by the sampie mean, Eq. (10.37). The
sampling variance of m r is given by
1
Strictly this estimator is unbiased only for r= 1, however this also applies for higher
moments when N is large.
540
10 Fundamentals ofData Processing
var[ mr1= (}~r =
~ (fl2r - fl; + r 2 flr-l fl2 -
2 r flr+l + flr-l)
(10.52)
where terms of order N- 2 and high er have been neglected. 95% confidence intervals are then mr ± 2 () m,' Note that Eq. (10.52) uses the exact central moments
fl r , which are actually unknown. However if N is suitably large, typically
N = 1000, these can be replaced by the central moment sampling statistics, m r ,
for practical computations.
Similarly, the mixed central moment
flr,s
=
JJ(x-flJ(Y-fl
y )'
p(x)p(y)dxdy
(10.53)
can be estimated using
mr,s
_)r (x; - Y_)s
= -1 ~(
L.. x; - x
N
(10.54)
;=1
which exhibits the variance
var[m r,s ] =
(}2m,,1
= ~("
,,2
N fA'2r,2s _ rr,s
+ r 2 r2,0
+ 52"
,,2
"
"
r'r-l,s
rO,2 rr,s-t
(10.55)
Note that fl lO =f.L Ol =0, flr,-l =f.L-l,s =0, fl 20 =var[x;] and f.L 02 =var[y;]. Eq.
(10.55) can be simplified for normally distributed processes, since then all odd
moments are zero and the 2nd, 4th, 6th and 8th moments are 1, 3, 15 and 105
times ()~ respectively.
The variances of the most common statistics in turbulence research are summarized in Table 10.1, for both an arbitrary and a normal distribution of the
process. Note that the formulas given in Table 10.1 are multiplied by N. The u
and v velo city components have been used for illustration. As an example, the
variance of the mean estimator is given as 0 N -1, which agrees with Eq. (10.40).
The expressions in Table 10.1 all assurne statistical independence between
sampies, as specified by Eq. (10.46). If the sampie rate is too high to insure statistical independence, the total number of sampies N must be adjusted so that
the total observation time yields the desired confidence bounds, according to
Eq. (10.44). Furthermore, it shoUld be no ted that turbulence quantities are seldom normally distributed, so that the simplifications given in Table 10.1 can
lead to significant errors if the normality is not previously established.
For more complex estimators, there exist several resampling algorithms with
which the uncertainty of the measured quantity can be estimated. In particular
the jackknife algorithm will be discussed, as first introduced by Tukey (1958).
Notes on its practical implementation are given by Efron and Tibshirani (1993)
and an evaluation of its potential with laser Doppler data is given by Benedict
and Gould (1996). This algorithm also assurnes statistical independence in the
data set x = (Xl ,x 2 '''''X N ) when computing some statistical estimator. The jackknife sampies
10.3 Estimator Expectation and Variance
541
Table 10.1. Estimator variances multiplied by N (Benedict and Gould, 1996)
Statistic
Variance for anydistribution
Normal assumption
U '2
U '2
U '2
2
4U '2
-12
U V'2 -
u'v'
R
.fz!2.r;a
=--;==-;=
uv
(u'V')
2
R;.[-(~:v-':;, ~[-(
::'4f :':i2 ~/~- -,-;2(:- ,-':,)1
+
-[
+ - ( + -(
(U'~") (U'~") II
+
f
U '2
2(U
'2
U '3
6(U
'2 )'
2 (1 + 2 R~v ) (U '2
f
V '2
U '4
X jack,i
== (Xl,X2,···,Xi_l,Xi+l)···,XN)
(10.56)
are obtained by leaving out in turn one of the data sampies. The jackknife sampIes are then used to compute N estimates ~ jack,i' The jackknife variance for ~ is
then given by
var
[A]
t/l jack,i
=
N-l~(A
N
~
t/ljack,i -
,,)2
t/ljaCk
(10.57)
where
"
t/ljack
1~
= N~t/ljaCk,i
A
(10.58)
The 95% confidence interval for the estimator is given by ~ ± 2var[ (~) jack jI/2.
The jackknife algorithm requires N 2 calculations per variance estimate. This
computationalload can be greatly reduced if the programming is modified specifically for each statistic to be studied. For example, if the mean square of the
velo city fluctuations, i7i, , is being studied, the jackknife sampie can be written
542
10 Fundamentals ofData Processing
1
-'-2-
A
9jack,;
N
= Ujack ,; = N -1 I( Uj -
-- 2
(10.59)
UjaCk ,;)
J~l
j:f:.i
This equation can be rewritten as
(10.60)
Each term in the brackets is summed only once over all j = 1, ... N and then
decremented by u" and uj respectively for each jackknife replication.
It can be showri theoretically that the jackknife is biased high on its estimation of uncertainty and thus, it will never underestimate the uncertainty of a
statistic.
10.3.3 Estimators for Transient Processes
If the flow process being studied is not statistically stationary, for instance a
transient process, then the concept of a mean value and central moments must
be modified. For experiments which are periodic or repeatable, the ensemble
velocity average defined in Eq. (7.15) is not replaced by a time mean (Eq. (7.16»
but rather by a phase average or ensemble average
u({})
Phase average
1
N
N
k~l
= lim- Id k )({})
N-->=
(10.61)
(10.62)
Ensemble average
where in the phase average, k is aperiod index and in the ensemble average k is
the repetition index. The phase average is typical of processes in rotating or reciprocating machinery, while the ensemble average would be used for repeatable, one-shot experiments. (t- t o) is the lag time from some reference time t o
in each repetition. Central moments in terms of these averages are dependent on
phase or time (t- t o) and can be computed according to
m r ({})
= lim N-->=
1
N
N
I(
U(k) ({}) - u({}»)
r
1
N
N
k~l
mr(t-tO )= lim- I[U(k)(t-to)-u(t-t o)]
N-->=
(10.63)
k~l
r
(10.64)
In such cases, statistical independence between samples is generally automatie. A good example of a periodic process is the flow in the cylinder of an internal combustion engine. The quantity u({}) then represents the mean flow velocity over crank angle, averaged over many cycles. The moments in Eqs. (10.63)
10.4 Propagation of Errors
543
and (10.64) refer to deviates from this mean. It is arguable however, wh ether
these moments can be related to turbulence behavior in the same manner as for
statistically stationary processes. In any case, the uncertainty estimate of the
mean can be computed directly from Eq. (10.40), since samples entering each of
the moments in Eqs. (10.63) and (10.64) are statistically independent from one
another. The variance can be estimated using the second moment estimator
(r
= 2).
10.4 Propagation of Errors
The concepts of stochastic and systematic errors for a given measurement
quantity have already been introduced in Eqs. (10.26) and (10.27) respectively. If
a derived quantity, y, depends on several individual measurement quantities Xi'
the question arises as to the measurement error in y.
(10.65)
The propagation of errors from the quantities Xi to y is treated separately for
systematic and stochastic errors.
The resulting systematic error in y is found by using a first-order Taylor expansion
~
df
dX)
df
dX 2
df
dX n
&=-&) +-&2+···+-&n
(10.66)
where 8x i are the systematic errors for each measurement quantity Xi and öy is
the overall systematic error. Note that all 8x i quantities are signed and as such,
systematic errors may be compensating in nature.
Stochastic errors are treated in the mean square, leading to the relation
(j
y
=
(10.67)
where the individual estimator variances (j~i have been evaluated using techniques described in the previous section. This formula assurnes that an of the
individual stochastic errors are normally distributed and that the standard deviations are all evaluated with the same confidence intervals. An extensive discussion of error propagation can be found in Kline and McClintock (1953),
Kline (1985) and Moffat (1985).
546
11 Processing of Laser Doppler Da ta
Constant velocity
40 % turbulence
0.01
o!:-'---'-.J.......J----'---'-J........L--'--7-'----'---'-J........L--'--'-J........L--'2!:-'---'-.J.......J----'---'-.L.....I----'---:!3----'---'--J........L--'--'-J........L~4
Interarrival time
t; - t;.1
[ms]
Fig. 11.1. The probability density function of the time between two particles for constant
velocity flow and flow with 40% turbulence (mean rate 900 Hz, integral time scale 10 ms)
The striking feature of the distribution pictured in Fig. 11.1 and expressed by
Eq. (11.1) is that the most probable time between two particles is zero. This is a
well-known property of random (Markov) processes and has direct consequences on signal processing hardware. Even at modest mean particle arrival
rates, particles will quite often appear in rapid succession. Either the signal
processor must be able to evaluate the signals on-line or suitable input buffering
must be available to avoid loss of information and to prevent processor 'dead
time'. Many early signal processors exhibited such inherent dead times and this
influences most moment and spectral estimators considerably. More recent
processors achieve on-line processing speeds.
On the other hand, the fact that velo city information is often available over
the very short time spans of consecutive particles suggests that, principally, information about very high frequency velo city fluctuations is contained in the
data. This is in strong contrast to data sampled at equal time intervals, for which
the sampling theorem applies and for which no information above the Nyquist
frequency f Nyq = 1/ (2Llt,) is available, where Llt, is the sampling interval. In fact,
with randomly sampled data, there is no equivalent to the sampling theorem or
the Nyquist frequency and with suitable estimators, it is possible to achieve
alias-free and unbiased estimates of signal power at frequencies far exceeding
the mean particle arrival rate. This is the topic of seetion 11.2.
Arrival time information is sometimes used in data processing as a basis for
validation. Knowing the particle velo city and the dimensions of the measurement volume, an estimate of mean transit times can be made. Measured arrival
times lying far below these estimates indicate that the signal processor may be
delivering more than one velo city value per particle. Since moment estimators
generally assurne the single realization condition, such multiple values per parti-
11.1 Estimation ofMoments
547
cle are unacceptable. These can often be recognized as peaks in the prob ability
density function of the interarrival time, which also indicate suitable thresholds
for validating each individual velo city before further pracessing.
11.1 Estimation of Moments
Moments of a random variable or of two random variables have been defined in
section 10.1 and when the random variable is a flow velocity, the moments become irnportant quantities in the equations governing fluid flow. The most important moments of velo city are the first moment, yielding the mean flow velocity, and the second central moment, giving the variance of velo city fluctuations,
or when normalized with the square of the mean velo city, the turbulence intensity squared. Covariance and correlation functions are examples of bivariate
functions and correspond to Reynolds shear stress terms in a flow field.
Some general estimators for these moments have been introduced in section
10.3 and their statistical variance has been discussed. In the present section the
expectation of various estimators for the specific case of laser Doppler data will
be addressed.
The particle-rate/velocity correlation mentioned in the introduction to this
chapter is the main physical reason for requiring special moment estimators for
laser Doppler data. The particle rate through the measurement volume is determined by the volume flux of fluid through the measurement volume and this is,
in general, correlated with the measured velo city component. Therefore, the
sampIe rate of the velocity increases also with velo city. For a given observation
time, high er velocities will be sampled more frequently than lower velocities and
a simple arithmetic mean of all sampIes will be positively biased over the true
time mean of the velocity. The degree ofbias will depend on how strang the correlation between the particle arrival rate and the measured velocity component
IS.
A correct estimator for the mean of the u flow velocity component must
therefore weight each sampIe with a factor g, which is inversely proportional to
the conditional prob ability density of a particle arrival at a time t;, given the velocity u;'
(11.2)
i=l
where the index i refers to the arrival time t; and the hat (!\) signifies that this is
onlyan estimation of the mean.
One possible weighting factor would be
1
(11.3)
548
11 Processing of Laser Doppler Da ta
which uses the magnitude of the vector velo city and assumes a spherical measurement volume. For this, a three-velocity component laser Doppler system is
necessary. For ellipsoidal measurement volumes, the expression
1
(ll.4)
is more appropriate (McDougalI1980), where ao is the measurement volume radius and Co is the measurement volume half-Iength. Nonetheless, three velo city
components must be measured to implement this weighting. Furthermore,
many authors have pointed out that this estimator is very sensitive to signal
noise. Even low noise levels already result in significant systematic errors in the
estimated mean.
Alternatively, the residence time (or transit time) of the particle, Ti' can be
used as a weight factor, since this will be inversely proportional to the vector
velo city magnitude (Buchhave 1975, Buchhave et al. 1979).
( 11.5)
This is only possible if the signal processor provides residence time information
and if it is reliable.
An estimator for the second moment is given in a similar manner
(11.6)
i=l
as are estimators for joint moments
N
_
L(U; -ft)(v; -~)g;
u' v' =
--,,;~::.cl_--'-'N----
(11.7)
Lg;
i=l
The last estimator assurnes the U and vvelocities are available at the same instant in time: meaning time coincidence was demanded during the acquisition.
For independent time series, i.e. data collection without coincidence, Eq. (11.7)
must be modified as follows
N
M
LL(U; -ft)(v; -~)guigvi
u' v' = _i~_l--,-j_~l_-----,-, _ _ _ _ __
N
Lgu;gv;
i=l
(11.8)
11.1 Estimation ofMoments
549
As an example, if a residence time weighting is being used, g u; corresponds to
the residence time of the i th particle, found from the u component signal. All of
the above estimators assurne that the seeding in the flow field is homogeneous.
A large body of literature studies the expectation bias of these and other estimators, often using simulated data sets (Erdmann and Tropea 1982, Edwards
and Jensen 1983, Edwards 1987, Winter et al. 1991a, Winter et al. 1991b, Fuchs et
al. 1994). The main reason for examining many different estimators is that not
all laser Doppler systems provide the necessary measurement quantities (e.g.
residence time) to formulate bias-free estimators. The most common of these
alternative mean velo city estimators are as follows:
• Inverse velocity (McLaughlin and Tiedermann 1973)
1
g;=~
(11.9)
Applied when only one velo city component is available. This estimator cannot be recommended for anyapplication.
• Arrival time
(11.10)
The arrival time is strongly correlated with the instantaneous particle rate
only at high data densities, NT" > 5 and its application is therefore limited to
such situations. This weighting scheme is suitable for moment estimation but
fails for estimation of correlation functions. More appropriate estimators are
given in the next section. Noteworthy is the fact that this is the only recommendation for non-homogeneously seeded flow fields.
• Free-running processor
(11.11)
This estimator is exactly the arithmetic mean of all sam pies. Although not
recommended for use, this estimator represents an upper bound on the expectation bias and furthermore, is readily analyzed theoretically. If the normalized error in the mean is expressed as
ß)-- u -
flu
(11.12)
fl u
where fl u is the true mean velo city, Erdmann and Tropea (1982) have evaluated ß) for one-dimensional flows exhibiting turbulence levels up to about
40% as
(11.13)
where Tu) is the turbulence level defined by Eq. (7.20). Thus, for a flow field
with 20% turbulence, the maximum error in the mean estimation will be approximately 4% using a free-running, mean estimator. This maximum error
550
11 Processing oi Laser Doppler Da ta
will decrease for three-dimensional turbulence, because the sampie function
becomes less correlated with the measured velocity component.
Several mean velocity estimators which are based on an arithmetic average
over all sampie values, but which use a modified sampling procedure, have been
theoreticallyanalyzed.
• Sample-and-Hold (S+H). The sample-and-hold procedure uses a regular time
sampling of the flow velo city, always using the velo city of the last validated
particle signal. This sampling procedure originated with early frequency
tracking processors, which provided an analog signal output, updated with
every new validated particle signal. Conventional sampling hardware (A/D
convertor) was then used to acquire discrete velo city values.
More recently, the S+H procedure has been shown to be a viable means of acquiring velocity data when estimating velocity spectra (section 11.2.2). Thus,
moment estimators using a S+ H sampling scheme are of some interest. Fuchs
et al. (1994) have shown that the statistics of arithmetic averages for the first
moment or central moments are virtually identical to the arrival-time
weighted estimators. As such, the condition NTu > 5 is again required to
achieve unbiased estimates. The difference is that the S+ H procedure uses
simple arithmetic averages but not all validated signal values, while the arrival time estimate uses the arrival time as a weighting factor, but includes all
acquired velocityvalues in the computation.
• Controlled Processor. The controlled processor has its origins in the work of
Erdmann and Tropea (1982) and results when the processor has long dead
times after acquiring a signal. Once the processor is again enabled, the next
particle in the detection volume is measured. Since the processor dead time is
independent of all flow phenomena, a degree of de-coupling between the
sampling and the velocity results. Other authors generalized the approach
and even prescribed a periodic enabling of the processor at times completely
unrelated to particle arrival statistics. However, as Erdmann and Tropea
(1982) correctly derived in the original analysis, and as Winter et al. (1991a)
and later Fuchs et al. (1994) confirmed, a complete de-coupling of the sampie
statistics from the velo city is not possible. After enabling the processor, the
statistics of the waiting times until the next particle are still highly correlated
with the flow velo city.
Two conditions are required to achieve unbiased estimators using a controlled processor and arithmetic averaging (no weighting factor). Winter et al.
(l991b) demonstrate clearly that S+H estimates are a special case of the controlled processor. Not only must the condition NT" > 5 be met for unbiased
estimators of the mean, but also the condition NT, > 5 should be met. T, is the
time between periodic enabling pulses of the processor.
Some results using experimental and simulated data are used to illustrate the
behavior of the various mean velo city estimators discussed above. The first example is taken from Fuchs et al. (1994) and involves a three-dimensional flow
field with a turbulence intensity of TU j "" 100 %. The data density (NT" ) is varied
11.1 Estimation ofMoments
551
between 0.1 and 10. In Fig. 11.2 the performance of the mean velo city estimators
using a free-running processor estimate, an arrival time estimate and a transit
time estimate are compared. The estimates are given both as velo city values and
as a normalized error (ßl)' For the normalized error, the true value of the mean
velocity was found by a post-diction of the measurements using the simulation
model.
Both experiments and simulations confirm the expected behavior. For the
mean velo city, the free-running processor yields a maximum error, independent
of the data density. The error is less than the upper bound ßl = (Tu l )2 '" 1, since
the turbulence is three-dimensional and not one-dimensional. The arrival time
estimate shows acceptable results only for data densities exceeding about
NTu > 5. The transit time estimator is reliable at all data densities. In Fig. 11.2the
simulation results obtained without consideration of the processor dead time
have been included as lines. Clearly, this aspect can also be important.
A second result, adapted from Winter et al. (1991a), is shown in Fig. 11.3.
Here the transition of a controlled processor from a free-running processor
(NT, «1) to a sample-and-hold processor (NT, > 5) is demonstrated using
simulations. Note that the statistics of the S+H procedure are equivalent to the
arrival time estimator. The error shown in Fig. 11.3 is normalized with the error
ofthe free-running processor.
Far fewer studies have investigated the performance of variance estimators.
Erdmann and Tropea (1982) demonstrate that the bias of the unweighted variance estimate is negative for turbulence levels up to approximately 60%, after
which it becomes positive. Fuchs et al. (1994) confirm this result and also show
.,-0.7
I
'"
~
0
<I;::
"
>-
:';::
I
I
• - - - - Free runnung processor
'" -------- Arrival time
• . . - .. - Transit time
u
Open symbols: Simulation
o:t
- 50 ...
Solid symbols: Experiment
......o
Lines: Without Processor simulation
"
o
~
"0
0.61-
'l
'"
~
0-
-- '"
" , ""t:;- -
"
0.51-
p-O__
0.4
1
0.1
0
-
-
ts - - -
0
0
•
-~--------- -
o
- - - - - -
o
o
o
---------------
------------:_-- ---~--------~-
.~
@
o
Z
~~o-·--~O~----O.w-~-o----~o~-~"~'-~'~~--~'~--~'-~"-~---_- _- _-_-~_-_- _- _- _p_- _- _- _- ~-~ -.~o
1
1
10
Data density
NTu [-I
Fig. 11.2. Comparison of experimental and simulated mean velocity estimators: freerunning processor, arrival time estimator, transit time estimator (adapted from Fuchs et
al. 1994)
11 Processing ofLaser Doppler Data
552
Normalized sampie interval
IV T, co 0.6
1.0
0.5
1.5
2.0
3.0
0.1
10
100
Integral scale data density NT" [degl
Fig. 11.3. Effect of normalized sample internal (NT,) on the mean velocity bias (adapted
from Winter et al. (1991a»
that, as with the mean velo city estimator, the error is a maximum for the freerunning processor, independent of data density. The arrival time estimator becomes reliable for NT" > 5 and the transit time variance estimator exhibits a very
low bias, independent of data density.
The issue of choosing an appropriate moment estimator is certainly less critical now than in the past, simply because almost all commercial signal processors
now provide reliable estimates of the transit time for each particle passage
through the measurement volume. Transit time weighting is the recommended
estimator for all measurement situations involving a spatially homogeneous
particle seeding.
The necessity to use a weighted estimator can be checked by cross-correlating
the measured velo city magnitude with the interarrival time fluctuations between
particles. This is especially reliable if all three velo city components are available.
A weighted estimator is only required if a significant correlation exists between
these quantities.
11.2 Estimation of Turbulent Velocity Spectra
In section 7.1 the three-dimensional energy spectrum of turbulent velo city fluctuations E(k) (Eq. (7.49», the simplified one-dimensional energy spectra,
f/J;j (k), (Eqs. (7.52), (7.53» and their corresponding Fourier pairs, the correlation functions, were introduced. Although these are functions ofwavenumber k,
they can be approximated directly from frequency spectra by assuming that
Taylor's hypo thesis is valid (u:/u«l) and by substituting t=x/u or
11.2 Estimation ofTurbulent Velocity Spectra
553
k = 2n! tu. Thus, the foHowing discussion will investigate the estimation of
frequency spectra (power spectral density, PSD) and their Fourier transform
pairs, the temporal correlation functions. The PSD function and its related correlation function allow integrallengthttime scales to be deterrnined, the rate of
dissipation of mechanical energy to be estimated and, generally, the small scales
of turbulence to be studied. Furthermore, flow periodicity becomes evident in
these functions.
In contrast to the rather straightforward computation of power spectral density functions for signal processing (section 6.3.1), now the input data is randornly sampled in time and no obvious equivalent to the fast Fourier transform
(FFT) is available as a computational algorithm. However, as anticipated at the
beginning of this chapter, some estimators are able to exploit the random sampling to achieve estimates of turbulent kinetic energy at frequencies much
high er than the mean particle arrival rate. The most common of these are presen ted below.
A general classification of spectral estimation techniques is presented in Fig.
1104 and shows the three principle approaches
• direct transform
• slot correlation foHowed by a eosine transform
• reconstruction with equidistant re-sampling and FFT
In each of the algorithmic routes, additional steps (shown as dashed boxes in
Fig. llA) are possible, representing various enhancements of these basic algorithms.
A comprehensive review and evaluation of these techniques are given in
Benedict et al. (2000). They come to the conclusion that two main algorithms for
estimation of the PSD and autocorrelation function (ACF) can be recommended:
the fuzzy slotting technique in combination with local normalization (van
Maanen et al. 1999) and the refined sample-and-hold (S+H) reconstruction
(Nobach et al. 1998). The direct Fourier transform, first introduced by Gaster
and Roberts (1975, 1977) and later modified by Roberts et al. (1980) and others
(Scargle 1982, Marquardt and Acuff 1983, Rajpal 1985, Saarenrinne et al.1997),
did not meet expectations and has been included here only for historical reasons. The variability of this estimator increases too rapidly with frequency,
hence, the estimate becomes quite unreliable, even for very long observation
times.
The optional pre-filtering step shown in Fig. 11.4 is also discussed fuHy in
Benedict et al. (2000) and is used to reduce the variability of the power spectral
density estimate. This is particularly appropriate if long-scale periodicities or
trends are to be first removed from the data set with a minimum of systematic
errors to the PSD or ACF. Also Kalman filters have been used in a pre-filtering
step to suppress noise components in the data set. (van Maanen and TuHeken
1994, Benedict and Gould 1995). However, such schemes are only applicable if
the data density is sufficiently high.
554
11 Processing of Laser Doppler Da ta
r-----------
------------,
-r -----------'
:
Pre-filler
SlolI ing Icchniquc .----- - - - - - -
:
--- • .----~----!...._------I+!-----------,
"'.
::l '
,sr:
c
E
: .g~
u'
~:
~I
..§ :
.~
~
-
~i
]
tZ :
l ___
I Reconstruction a nd equidistant re-sampling I
J
r-------t
51 : g
:
1 - __ I ' - -_ _ _ _---1~
Filter :
'--T --'
t
AUlOcorrclation cstimatc
I
r-----------+------------.
,------------r------------'
: Rcfincmcnt orcurvc fittin g:
Spectral est imate
e osine tra nsform
I
________ J________ .
.
: Noisc supprcssion :
'- ------- --- --- --'
Fig. 11.4. Power spectral density estimation methods for laser Doppler data
11.2.1
The Siotting Technique
The slotting technique, generally credited to Mayo et al. (1974), is pictured in
Fig. 11.5 and computed as
N
N
I~>juh{tj -ti)
Rk = R(kAr)=_i~_lN"-:-j~.:....JN~---IIbk{t j -ti)
i~l
(11.14)
j~J
1
for _t !-t
_ - ' -k I<-
I Ar
2
otherwise
with the velo city sampIes uj = u(t) and u j = u(tj)' The velocity product of all
sampIe pairs with time separations falling within a given lag time bin is added to
that bin's sum as another estimate of the ACF for that lag time. After processing
all possible signal pairs, each sum is divided by the number of accumulated
products in that bin. The original algorithm of Mayo uses J = 1 which means
that all sampIe pairs occur for k and -k. Calculating only positive lag times
(k;;:::O) Eq. (11.14) can be modified to J=i. Note that the first ACF coefficient
11.2 Estimation of Turbulent Velo city Spectra
11(1)
i j=i+l
Vclocily
j=i+2
~
I
..................
~
f-ft-r I-I--r
~
+
++
+
+
+
+ +
555
() Vdocily mC'dsurcmCnI
x Produci 11,11,
limc 1
Summation
umofproducts
lvi ton
Number 01 products
Autocorrclal ion
function
T
k=
0
I
2
3
4
5
6
7
8
9
Fig. 11.5. Time series of laser Doppler velocity data and slot correlation with equidistant
lag time bins Llr
(r = 0) eontains also self-products. With J = i the self-products are overrepresented compared to J =1. Therefore, an additional weighting factor of 1/2
is often used for self-products when (J = i). However, since noise in each of the
velocity estimates is unavoidable, the first slot will be increased by the variance
of the noise. Since the ACF eoefficient at T = 0 normally corresponds also to the
variance of the process, this variance will be overestimated using the estimator
given by Eq. (11.14). This also leads to a biased PSD estimate. Using only crossproducts (J = i + 1) leads to a spectral estimate with a noise-independent expectation. In fact, only the estimation variance increases in the case of noise. However, the first slot can also be under-represented due to processor dead times.
This again, can lead to a bias of the k = 0 ACF eoefficient and thus, the PSD estimate. The ACF coefficient estimates are usually considered valid for time lags
in the middle of each bin.
A one-sided PSD estimator is computed from the slot correlation by taking its
discrete eosine transform
Sj = SVj) =
s( 2/L1r)
=2L1{ Ro
+2~RkeoS(21tfjkL1r)+(-I)jRK)
(11.15)
where K is the index of the maximum time lag of the ACF and is chosen by the
user.
A severe limitation of the standard slotting technique is its high variance
(roughly constant up to moderate lag times), which leads to poor estimates of
turbulence spectra. In order to reduce the variance of the slotting technique, van
556
11 Processing of Laser Doppler Da ta
Maanen and Tummers (1996) employ an ACF normalized by a variance estimate
particular to each slot, called the local normalization. This results in an estimate
ofthe correlation coefficient
N
N
L~>;ujbk(tj -t;)
Pk = p(kAr) = ----,====;~=l=j~J=========
[t~U;bk(tj -t;))[t~U~bk(tj -t;))
(11.16)
and is used as the basis for the cosine transform. The corresponding one-sided,
real PSD estimator is
S =S(f.)=s(-j-)
2KAr
J
J
=2o-:A{I+2~Pk cos(21tfjkAr)+(-I)j PK)
(11.17)
where o-~ is an estimate of the velo city variance. While Eq. (11.16) has been
shown to have significantly lower variance for small lag times than does Eq.
(11.15) normalized by Ra' the variance at large lag tim es is unchanged.
Another method for reducing variance in the slotting technique has been
dubbed the fuzzy slotting technique by Nobach et al. (1998). In this estimator, a
lag-product weighting scheme is defined as
for It.JA-t
r
I
-
I
k <1
(11.18)
otherwise
and is used instead ofthe top-hat function in the original algorithm, Eq. (11.14).
This estimator allows lag products to contribute to two slots simultaneously and
weights lag products that lie dose to the slot centers more heavily, as depicted in
Fig. 11.6. The combination of this fuzzy slotting technique with local normalization is one of the recomrnended methods of computing the ACF.
Buchhave et al. (1979) argued that the ACF can be corrected for the partiderate/velocity correlation by weighting each cross-product u; U j according to
N
N
LLu;ujgig j
Rk = R(kAr) = _i~_l7:-~~_J-;-:-N_ __
LLgigj
;~l
(11.19)
j~J
where the weight g; is the transit time of the i th partide. This correction is
combined with the previous estimator to yield a final general expression given as
(Benedict et al. 2000)
11.2 Estimation ofTurbulent Velocity Spectra
11(1)
Vclocily
o
i j;i+l
j;i+2
II
I
o VclQ(.i ty measurcment
x Producl
- - ~- - - -x
t
x_
. . . . . . . . . ,. I *---*--X--r---t--T
xt
I . Ir
()
11,(1 - I)
J
f
x
x
x
Time I
X
x
xx
+
++ + + + + ++ ++ ++ +
':1
x
557
•ummation
Sum of wcighlcd produClS
.,.
.,.
.,.
.,.
.,.
+
+
+
Division
lot
Wcighling
•
1J - I ,
Wcighted numbcr
of products
function
k=
2
0
6
5
]
7
8
9
Fig. 11.6. The weighting scheme of the fuzzy slotting technique
N
N
&:L~>;Ujg;gjbk(tj -ti)
R(kLl ..) = -;=0====;==1~j=~J= = = = = = = = = = = =
[t~u~gigjbk(tj -( )It~U~gigjbk(tj -t;)]
b,(t;-t)={:
(11.20)
t. - t -k I<1
for I-}--'
LI..
2
otherwise
with the velo city variance estimated as
(11.21)
i= l
The weighting factors as introduced in section 11.1 can be used, but in the
case of arrival time weighting the forward-backward weighting is advantageous
(Nobach 1999b)
558
11 Processing of Laser Doppler Da ta
g;
=t; - tH
(11.22)
gj =t j +1 -tj
because of the correlation between the time lag and the inter arrival time distribution.
11.2.2 Reconstruction with FFT
Reconstruction methods create equidistantly spaced time series by re-sampling
according to various interpolation schemes, thereby allowing a FFT to be used in
making PSD or ACF estimates. The most common scheme by far is the sampleand-hold (zeroth-order, S+H) reconstruction. This is the simplest of the polynomial dass of reconstruction algorithms and is depicted schematically in Fig.
11. 7. It can be written as
for
U(SH)(t)=U(tJ
t; <:::;t<t;+1
and
i=l, ... ,N
(11.23 )
where N is the total number of sampIes in a given block. The reconstruction can
be performed either over the entire data set or with single data blocks. The equidistant re-sampling with time steps of Llt, is performed by
U,(SH)
= U(SH)(I' At,)
s:
lor
LJ
°
.
1=
, ... , N R- 1
(11.24)
and leads to a data set of N R sampIes that can be processed by a Fourier transform.
The Fourier transform with the imaginary unit j is given by
U (SH)
_n
(2'
in )
- 1tJ-
= ~1
L.. u;(SH) exp
;~O
NR
for n=O, ... ,N R -1
(11.25)
and leads to the full block PSD
SA(SH)
n
= Llt, IU(SH)1 2
NR
_TI
s:
lor
n=O, ... ,N R -1
(11.26)
u(t)
Particles
x Re-sampled values
Timet
Fig. 11.7. The concept of zeroth-order reconstruction (S+H) and re-sampling at equal
time intervals
11.2 Estimation of Turbulent Velocity Spectra
559
and, through the inverse FFT
~(SH)
Kk
~l ~(SH)
1
= - ~ S;
N R ;~O
(
ik)
•
exp 2nJNR
for k=O, ... ,N R -l
(11.27)
to the full block ACF
(SH)
R~ k(SH) = _1_X~
L1t k
c
lor
k
0
=,
... , N R- 1
(11.28)
s
To reduce the variance of the final PSD estimate, only K + 2< N R values of
the ACF are used for further calculations. K is the maximum desired lag time for
the ACF. In the refinement step outlined below, K + 1 values of Rk are required
and for the subsequent Fourier transform to the PSD one further sampie in the
ACF is required, i.e. K + 2 sampies in total.
Unquestionably the work of Adrian and Yao (1987) was a major step forward
in understanding the fundamental content of a S+H reconstructed signal. They
derived an expression for the expectation of the PSD
[
ES~(SH) (0) ] =
12 ·2 ( S(W)+-·-3-2
2()~ )
1 + 0) I N
N Au
'----y------l
~
Filter
(11.29)
Step noise
where E[S(SH) (0)] is the expectation ofthe spectral estimate and S(w) is the true
spectrum «()~ is the variance of the velo city fluctuations and Au is the Taylor
microscale as defined by Eq. (7.46». The second term in parentheses was termed
step noise and corresponds to the spectral contribution necessary to account for
the step-like jumps in a S+H signal. This contribution vanishes with the inverse
of the third power of the data rate, N- 3 • The factor in front of the parentheses,
operating on both the true spectrum and the step noise, is a first-order, low-pass
filter with cut-off frequency NI (2n). This was subsequently named the particlerate fIlter and at higher frequencies, dominates the spectrum. Actually the step
noise is a form of aliasing, in which the signal energy above the fIlter cut-off frequency is distributed evenly over the entire spectrum.
One result from Adrian and Yao (1987) is reproduced here because of the
clarity it brings to how all reconstruction methods effect spectral estimators.
Simulated laser Doppler data from a white noise process are submitted to a S+ H
reconstruction, re-sampling and a conventional FFT PSD estimation. The result
is shown in Fig. 11.8. The effects ofboth the additive step noise and the low-pass
fIlter are clearly evident at low particle rates, indeed the completely falsified
spectrum for the lowest data rate begins to uncannily resemble that of turbulence! The conclusion of Adrian and Yao was that such spectra are reliable only
up to a frequency of NI (2n), a substitute for the Nyquist frequency rule concerning regularly sampled data. Their assumption that the ACF of turbulent velocity fluctuations is exponential was not instrumental to this conclusion. Of
course the computed spectrum below the cut-off frequency is still falsified by the
560
11 Processing of Laser Doppler Da ta
-
Sl>l<
-
-
-
-
1
_1- _ _
-
1000 I-
"-
"-
----------------------------------------~
-'~----,
"
"\.
\
100
r-
\
--N--->=
------- N = 1
"\.
"\.
"\.
N=0.3
1
0.01
... ...
.
1
0.1
Frequency f[a.u.]
Fig. 11.8. The PSD of a white noise process computed using a S+H reconstruction and resamplingwith FFT PSD estimation
step noise or any other aliased energy from high er frequency components in the
signal.
Even the nature of the interpolation curve in the reconstruction does not alter
the basic limitation of the particle-rate filter. This was demonstrated by Müller
et al. (1994), who applied numerous other reconstruction schemes to simulated
and measured laser Doppler data. These included higher order polynomials,
projection onto convex sets (POCS) (Lee and Sung 1992), fractal reconstruction
(Chao and Leu 1992) and the so-called Shannon reconstruction (Veynante and
Candel 1988, Clark et al. 1985). Although the reconstructed signal in time domain was visually more appealing than a S+ H signal in many cases, the spectral
content was altered surprisingly litde.
Nobach et al. (1996) developed a refinement that cancels the particle-rate filter effect associated with S+ H reconstruction. The approach is to derive an expression for the re-sampled ACF in terms of the true ACF. The relation is then
inverted to improve the ACF estimation. The inversion is given as
for k =0
for k=l, ... K
c=
exp( -
N,1t,)
(11.30)
----'----'--.,,-
[l-exp(-N,1t,)f
where ft.. is the refined ACF estimate based on the ACF of the reconstructed and
re-sampled time signal, ft..(SH). A full derivation of this relation is given by Nobach et al. (1998). The PSD follows from a eosine transform of R. In principle, a
refinement can be derived for any reconstruction algorithm, but for the S+ H re-
11.2 Estima tion ofTurbulent Velo city Spectra
561
construction the refinement becomes the very simple algorithm given above and
is effective enough that the advantages of other reconstruction schemes become
negligible.
11.2.3
Post-Processing Steps
77.2.3.7 Model-based Variance and ACF EstimationlNoise Removal
To remove the noise and the effect of the processor delay from the ACF estimate,
a model-based estimation of Ro can be used. Principally speaking, a convenient
modellike that ofvan Maanen and Oldenziel (1998) or Müller et al.(l998b) can
be used. van Maanen and Oldenziel (1998) introduce an eight-parameter autocorrelation model, which is extremely flexible and can be analytically Fourier
transformed. Nevertheless, the parameter optimization is difficult and costly.
The use of a weighting function with strong coefficients dose to the time lag
zero allows simpler models to be used. van Maanen and Tummers (1996) used a
Gaussian function as a model of the ACF, corresponding to the Taylor microscale estimation (with parabolic behavior of R near r = 0). Good results were
obtained using the more flexible model
Rk
=
aexp(-bk c )
(11.31)
which is equivalent to the Gaussian function for c = 2 and to the exponential
function for c = 1. However, even this model is not able to describe periodic
components, so that the weighting function should strongly decrease with the
time lag r, i.e. 1/ r or a similar function. The figure of merit
(11.32)
gives the weighted deviation of the model ACF R k relative to the estimated ACF
Rk • Note that the value Ro is not used because of the distorting effects. Minimizing the distance value d leads to an optimal parameter set [a;b;c], which is
used to obtain a new ACF estimate at time lag zero Ro = a.
77.2.3.2 Variable Width Windowing
From the ACF estimation, a set of K + 1 values (k = 0, .. .,K) is obtained, which
can be transformed to the PSD using the discrete eosine transform (Eq. (11.15».
Alternatively, Tummers and Passehier (1996) recommend a variable windowing
of the ACF for the transform to the PSD:
(11.33)
with windowing coefficients dk(j), which varywith the frequency f Good experience was obtained using the Tukey-Hanning window
562
11 Processing of Laser Doppler Da ta
I 1
-+-cos
{
dk(J)= 2 2
(1tf kAts )
for IfkAtsl < K
K
o
(11.34)
otherwise
The parameter K can be chosen arbitrarily, e.g. K = 6 was found to yield good
results.
This technique reducesthe estimation variance espeeially for higher frequeneies. Although a leakage effect arises because of the windowing, this effect is
constant over all frequeneies, hence no spectral distortion occurs. However, now
the spectrum can be calculated at any frequency. This could reduce the number
of spectrallines required in the case of a logarithmic axis scaling, which is often
used to present turbulence spectra. This is important because the FFT cannot be
used for this transform and every spectral value has to be calculated separately.
An example improvement, achieved with the variable windowing of the ACF,
is shown in Fig. 11.9, where, in particular, the variance displays a strong decrease. These results were obtained using simulated data as outlined in Benedict
et al. (2000).
b
a
"--T""TTTTmr-r"TTTTTTIr-rTTTTnrr----r"T"13..,-
10- 1 ..------.-.--rTTTTTI---.--,-,-rrTTTI-,--""
~ 10'
o
g;
10'
0)
u
.~
10-'
:>'"
10-5
....
Rectangular
window
Variable
10-60.Ll---'-..l....L.LWlL-.L.L.J...J..LllJILO----L.I..l....L.J..WJ1O"-0---L..J...L.J
Frequency J[kHzl
10
Frequency J[kHzl
Fig. 11.9a,b. Comparison of the variable windowing technique with a rectangular window.
ACF estimation using the fuzzy slotting technique with local normalization. a Mean
spectrum (for illustration the variable windowing is shifted by one decade on the x axis.)
b Variance
77.2.3.3 Block Averaging
Each block of laser Doppler data yields an independent ACF and PSD estimate.
For NB blocks, each of duration TB' the mean ACF estimate (R) and the mean
PSD estimate (5) and the corresponding variances a-~ and a-~ of the single block
estimates can be calculated using
11.3 Correlation Estimates [rom Multi-Point Systems
563
(11.35)
(5;=_1 ISr;)
NB
(11.36)
;=\
(11.37)
(11.38)
where the upper index (i) represents the estimates of the i th block. The variance
of the averaged ACF and PSD can be estimated through
(11.39)
1
N
A
2
A
2
(J'- = - ( J '
S
S
(11.40)
B
This result suggests that a block splitting of the input data record prior to
processing could be advantageous, since the overall variances of the estimates
decrease with increasing number of blocks. This is not actually true for the two
estimators discussed here. Equations (11.39) and (11.40) are correct and can be
used for estimating variances but in fact, the variances are determined alone by
the total record length, T, for the averaged ACF and additionally by the maximum lag time for the PSD.
A
2
1
(J'- - - - . -
R
rBNB
(11.41)
If an FFT is being used in the estimation procedure, the block length should
be large relative to the correlation interval (integral time scale) and at least 2KAt
to reduce edge effects. Effective use of Eqs. (11.39) and (11.40) also requires a
minimum of 10 blocks. (K is the ACF index at the maximum time lag)
To summarize, the slotting technique requires no block splitting and the reconstruction technique with refinement benefits from block splitting if the FFT
is used to obtain the initial ACF estimate RrSH ).
11.3 Correlation Estimates from Multi-Point Systems
Two or multi-channellaser Doppler systems are used when the space-time or
spatial correlation function defined in Eq. (7.28) is to be measured. However, as
pointed out in seetion 7.4.4, estimators must be carefully chosen to avoid bias
errors at small spatial separations due to hardware coincidence effects. Fur-
564
11 Processing of Laser Doppler Da ta
thermore, demanding coincidence on two channels separated in space greatly
reduces the data collection rate, often far below the data rate on either of the individual channels. The duration of the measurement to achieve a reasonable
number of sam pIes N, may become intolerable, or if fewer sampies are accepted,
the variance of the estimator increases.
The discussion below is therefore restricted to the case of non-coincidence
data acquisition; meaning that data is acquired on each laser Doppler channel
independent of the other but with a common time base. Und er these circumstances, two estimators can be recommended:
• Slot correlation
• Reconstruction with re-sampling and refinement
Müller et al. (1998) have demonstrated that both estimators perform well, although the slot correlation does exhibit a larger bias at short time lags when a
particle-rate/velocity correlation is present in the data set.
Denoting the two laser Doppler channels as A and B, the slot correlation can
be computed using
NA NB
L~>A (t; )uB(tj )bk(t j
- t;)
(kLir)
=
_;~_l-,j_~l_N:-O--'-'N------AB
R
!~bk(tj-t;)
(11.42)
;=1 j=l
1 t - t
1
for k __ ~_J_ _' <k+2
Lir
2
otherwise
where Lir is a prescribed lag time window or slot. As with ACF estimators, this
cross-correlation estimator may be extended using various weights, a fuzzy slotting scheme or local normalization. The effect of these modifications have to
date not been studied systematically.
The method using reconstruction and re-sampling is pictured schematically
in Fig. 11.10 for the case of a sample-and-hold (S+H) reconstruction. The conventional cross-correlation function is obtained from the re-sampled data (Eq.
(11.23» using
for k? 0
(11.43 )
for k < 0
where N r is the number of re-sampled points. This estimate of R AB (r) will have
a systematic error associated with the S+ H reconstruction, similar in nature to
that derived for a single channel system, as discussed in the previous seetion. To
estimate and correct this error, a statistical relationship between the velo city
11.3 Correlation Estimates from Multi-Point Systems
U A (t)
-
Channel A
QiI
x
565
Flowvelocity
Reconstruction
Particle
Resampling
Timet
Timet
Fig. 11.10. Sample-and-hold reconstruction and re-sampling of two laser Doppler ehannels
values at the sampIe points r A = iArand r B = (i + k)Ar to the velocities at the
previous particle passages t A and t B must be found.
Details of this statistical relationship are lengthy and involve careful consideration of the particle arrival statistics in each of the measurement volumes. The
solution is presented only conceptually here and the reader is referred to originalliterature for a complete solution (Müller et al. 1998). The re-sampled correlation function is related to the true correlation function through a matrix F
(11.44)
which, when inverted, yields an improved estimate of the correlation function
(11.45)
The matrix is a function of the total number of events in each of the channels,
NA and NB' as weIl as the total observation time T.
The performance of these two estimators has been evaluated using simulated
data sets and can be summarized in Fig. 11.1l. The data density was 1.6, i.e. on
average 1.6 particle arrivals per integral time seale. The slot correlation exhibits
a high er bias due to the particle-rate/velocity correlation. This bias will increase
at high er data densities. An application of suitable weights in estimating the slot
correlation can decrease this bias.
Having estimated the cross-correlation, the eross-spectral density can also be
computed by performing one further FFT.
As discussed in section 7.4.4, one purpose for conducting two-point laser
Doppler measurements is to estimate Taylor mieroscales, Äii,k (Eq. (7.46». To
do this, a parabolic curve-fit is performed on the measured spatial correlation
function, near a spatial separation of zero (for isotropie turbulence).
Llx 2
1
Rll (Ax,O,O) = 1 - 2 -
,111,1
(I 1.46)
566
11 Processing of Laser Doppler Da ta
b
a
0.8 r-T--r--,--,---,.,.-,...--r--'-T"""T--r--,--,---,.,.-,r-r......---.
Refined estimator
Simulation
Slot correlation
Simulation
-10
-5
o
5
10-10
Timelag T[sl
-5
o
5
10
Time lag T[sl
Fig. l1.11a,b. Performance of cross-correlation estimators when a particle-rate/velocity
correlation exists in input data. a Slot correlation without weights, b S+H estimator with
refinement
The importance and means of achieving unbiased estimates of Rll for low
Llx j was the topic of section 7.4.4, nevertheless, the correlation estimator will
generally exhibit some error at Llx j = 0 and will begin to deviate from a parabolic behavior at larger separations. Furthermore, as both Trimis and Melling
(1995) and Belmabrouk and Michard (1998) demonstrate, the correlation function will exhibit a bias value at zero separation due to noise. Therefore, the range
of separations used for the curve-fit must be carefully chosen. This issue has
been addressed by Belmabrouk and Michard (1998).
The minimum separation entering the curve-fit is determined by the noise
influence and the influence of the measurement volume overlap. It is generally
unambiguous from the measurements and should not depend on characteristics
of the flow. The maximum separation to be included is