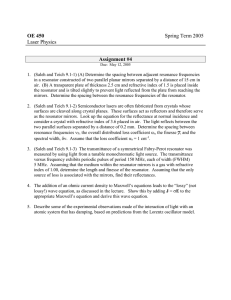
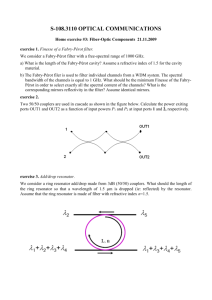
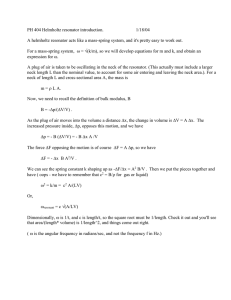
FMT Assignment Owen Huisman 1 The problem of high Q We consider the problem of characterising the response of a resonator to driving. We limit our discussion to mechanical resonators, but it could be easily extended to other, equivalent systems. With a driven mechanical resonator we mean a system that is described by the following equation of motion: F (t) = ma(t) = −kx(t) − γv(t) + Fdrive (t) k represents the stiffness of the system, and γ the dissipation. Since the system is linear and does not depend explicitly on time, the most straightforward method to gain more insight is to apply Fourier analysis. In the frequency domain the equation of motion reads: F (ω) = −mω 2 = −kX(ω) − iωγX(ω) + Fdrive (ω) We can now define the transfer function that relates the displacement to the driving at frequency ω, namely: X(ω) 1 = Fdrive (ω) −mω 2 + k + iωγ q k and Q = We rewrite this using the characteristic quantities ω0 = m H(ω) = H(ω) = (ω02 1/m − ω2 ) + ω0 m γ . iωω0 Q We interpret ω0 as the resonance frequency of the system, the frequency at which the the system responds strongenst to driving. The quality factor Q can be interpreted as (i) the response ratio between driving at resonance (Fdrive (ω0 )) 0 )| and constant driving Fdrive (0): Q = |H(ω |H(ω) |, (ii) as characterising the FWHM of the resonance peak: ∆ω = ωQ0 or, most importantly here, (iii) the exponential rate exp (± ωt Q ) at which the energy of the system grows or decays when driving starts resp. stops. A nice example of H(ω) from a paper about aeroacoustiscs is given in figure 1. 1 Figure 1: Bode magnitude and phase plot of the transfer function of a resonator system from the literature. The resonanse frequency is at 48.2 Hz. After [Rucz, Péter. (2020). 3D aeroacoustic simulations of a flow-excited Helmholtz resonator.] Ideally one would measure the transfer function directly. One measures H(ω) at each frequency. For this one desires steady-state data, i.e. after one starts the driving one waits until the resonance stops growing in amplitude. In this work we take this data to be measured using a lock-in amplifier. All plots below were made using artificial data, for which the time domain equation of motion was simulated using the forward Euler method. On this artificial data we applied the lock-in procedure numerically. We imply that the displacement x(t) is converted to a voltage V (t) by the measurement set-up, which has its own corresponding transfer function that is neglected here. The lock-in is usually able to provide the driving as well. The measured voltage is mixed with the voltage of a local oscillator. If the driving is Fdrive (ω), the signal is mixed with cos ωt and sin ωt to obtain the so-called in-phase resp. quadrature components of the signal. From these one can obtain the complex displacement (printed in Fraktur script to distinguish from the real displacement): x(t) = |x(t)|eiωt For a harmonic resonator, x(t) should trace a circle in the complex plane for every oscillator cycle. See figure 2. 2 Ring down of resonator in time domain 1.0 1.2 1.0 Im[x(t)] 0.5 x[normalised] Complex plane plot of x(t) 1.4 0.0 0.8 0.6 0.4 0.5 0.2 1.0 0.0 0.00 0.05 0.10 time[s] 0.15 0.20 0.6 0.25 (a) Ring down simulation data x(t) of a Q = 5, f0 = 50Hz resonator. 0.4 0.2 0.0 0.2 Re[x(t)]] 0.4 0.6 0.8 (b) Complex plane plot of x(t) obtained from analysing simulated x(t) with a lockin amplifier. Figure 2 Trigonometry then tells us that any frequency component ωi in the original signal will be frequency shifted to a ωi + ω and ωi − ω component. Because of the linearity of the system we already know that the output when driving with frequency ω will be predominately of frequency ω. We see that exactly this part of the signal (ωi = ω) will be shifted to a DC component, while the other components (i.e. the noise) will end up with finite frequency. If we now apply a low pass filter (LPF) to the mixed signal we ideally obtain the following in-phase and quadrature components: I = X(ω) cos ϕ Q = X(ω) sin ϕ Here ϕ is the phase difference of the signal w.r.t. local oscillator. If this oscillator also provides the driving frequency, we can state that ϕ = arg(H(ω)). The p amplitude |X(ω)| = I 2 + Q2 can be used to find: |H(ω)|. See figure 3 for an example of this procedure. However, for high Q this method proves impractical. Ideally one takes data points of H(ω) when the system is only excited at frequency ω. Of course the lock-in procedure can filter out other frequencies to some degree, but this has a finite bandwidth and in general the different frequencies will still be correlated. In practice this would imply that one has to wait a very long amount of time until a resonance has fully dissipated before the next frequency is measured. More specifically, an oscillation of the resonator will be correlated with other oscillations that occur withing τ = 2Q ω after it. One sees that at for example f = 50Hz and Q = 106 , we have τ = 3183 seconds, which is roughly 1 hour! If one wants to determine H(ω) at several frequencies this way of measuring becomes unfeasible. 3 Bode Magnitude plot made by lock-in simulation 5 20log(|H( )|) 10 15 20 25 20 40 freq[Hz] 60 80 Figure 3: The transfer function obtained by driving the simulated equation of motion with different frequencies and analysing the steady state, as described in the main text. The resonance is at 50 Hz. 2 Time domain measurement An alternative to the procedure described above would be to analyse the time domain data x(t). For this we can consider the ring down of the resonator (the amplitude decay after driving has ceased). It is most easy to perform this analysis after driving with the resonance frequency. We q assume that in a real k experiment a reasonable estimate can be given for ω0 = m and such a estimate can also be easily verified by checking if the system indeed has the strongest response around this frequency. For the (normalised) time domain data we provide the following Ansatz, which solves the homogeneous equation of motion for large Q after driving with F (ω ≈ ω0 ): x(t) = e− −ω0 2Q t cos (ω0 t) ω0 We see that the decaying envelope is proportional to e− 2Q t , as we mentioned above. See figure 4(a). Note that value of |x(t)| in this figure is offset somewhat to what we would predict it to be, and that it still contains part of the 2ω component. This is to the limitations of the (digital) LPF. This resonator has a frequency of 50Hz and Q = 500. In real life this would not be a very high Q, but this number was chosen to make the simulation computationally feasible. The lock-in amplifier can extract the decaying envelope, which corresponds to the modulus of the complex displacement x(t). If we take the natural logarithm of this data, the analysis comes down to fitting a linear function to a line with ω0 slope ∼ 2Q . An example of this is shown in figure 4(b). The fit was performed 4 using a least squares method. The value of Q = 500 was perfectly reobtained from the slope. Obtaining the value of Q from such a fit, in combination with the estimate for ω0 , is enough to fully characterise the transfer function of the system. Ring down of resonator in time domain 1.00 0.75 x(t) |x(t)| 0.50 0.6 0.25 0.00 ln(x) x[normalised] data linear fit 0.5 0.25 0.50 0.7 0.8 0.9 0.75 1.0 1.00 0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75 2.00 time[s] 1.1 0.00 0.25 0.50 0.75 1.00 1.25 time[s] 1.50 1.75 2.00 (a) Ring down data x(t) of a Q = 500 res(b) Natural logarithm of the data for |x(t)| onator in blue. In magenta the modulus shown in blue, and a linear fit of this data |x(t)| is given, as obtained by the lock-in shown in red. procedure. 5