U-M-I
BEST COPY AVAILABLE
TORSIM: An Efficient Fault Simulator for Synchronous Sequential Circuits
S. Gai
P.L. Montessoro
M. Soma Reorda
Politccnico di Torino
Dipartimento di Automatica e Informatica
Torino - Italy
Abstract
fanout elements, is accomplished by calling an ad hoc generated procedure which is different for each element; in the
procedure all the topological information are coded. Sophisticated programming techniques coming from compilerwriters experience can be adopted for choosing the more
efficient form for the procedure.
l h r p p t r dczrribcs a new approach to the fault simulation of
..iyiirltronous srquentinl circuits. Its novelty comes from combini n g / / i f tv lit-drii,cn compiled-code simulation technique proposed
iii A
[]'
with / / i f single fault propagation fault-parallel fault siinulal i n r i i r I p r i / / i i n imtd in [ZO].
Our approach is particularly suited
TORSIM's efficiency does not come from new methods t o reduce the numher of events t o he processed, but from drastically
improving the performance of events processing, i.e., of the evaluation and propagation phases.
The experimental results reported in the paper have been gathered through a prototype, which has been run on the standard
set of benchmark circuits.
TORSIM represents a significant advancement in the area of
fault simulation of large numbers of input patterns on synchronous sequential circuits; its speed is about one order of magnitude greater than the one of the fastest existing fault simulators
like PROOFS; a completely new approach is introduced, which
extends the event-driven compiled-code technique t o fault simulation, while still exploiting many of the ideas already proposed.
Section 2 describes TORSIM and Section 3 presents the experimental results proving its effecti,eness. Section 4 draws some
conclusions and spends some words about our current work.
fho.,f opplications requiring the fault simulation of very high
of i n p u t patterns, like signature computation or fault
rliclionnry construction. A fault sirnulator named TORSIM has
h f t t i w i f t r i t to w r i f y the eflectiueness of the approach. Tfir re. . i r / / s u*f prcsent show an average speed-up in terms of CPI' time
o / inore thnn onf order of magnitude with respect to the ones
I'f p r l f d i l l [f U].
fiir
iri1ri16fi~s
Introduction
1
The inrrrasetl importance of testing during the design and main~ r n a n c ephases of the circuit life forces the design community t o
<~ii(Iy
new techniques to make testing easier and faster. Fault
siiiiiilators are an essential element of any current CAD system;
tlirir u ~ eincludes computing the fault coverage produced by a
giveii test set. building the fault dictionary for diagnostic purposes, and determining the aliasing probability in BIST archil cv3ures.
'1-lir last two operations are computationally heavier than the
fii.<t one Iwcause they require the fault simulation of large num1 ~ 1 . of
5
tczt pattrriis. We thus focused our attention on the
(lmdol)nic-nt of a fast tool for the fault simulation of large numIwrs of pattrrns for synchronous sequential circuits described at
the gate level: the permanent single stuck-at and the zero-delay
Iiio&4s havr lwrn assumed.
0111.
fault simulator. which we called TORSIM ( m n o Fault
SI \lulator). slioirs high-performance characteristics thanks to
I I i < > comhiiirtl use of several different techniques:
0
2
TORSIM
TORSIM is a fault simulator for synchronous sequential circuits
described at the gate level, adopting the zeredelay model and
the permanent single stuck-at fault model. It is based on the
single fault propagation algorithm, and uses the parallel-fault
technique, like PROOFS.
The main novelty of TORSIM is the extension of the event-driven
compiled-code technique [SI to the zero-delay fault simulation of
synchronous sequential ciicuits (event-driven compiled-code fault
simulation). Ad hoc generated code is executed to perform the
evaluation of each gate and the scheduling of the fanout elements.
thr .qi)tq/f .fittilt propngation
algorithm: this technique was
. .
first proposed i n (111 for combinational circuits, and then
improved 1-, inclutling a deeper analysis of the topological
~
2.1
of' the circuit [I] [6] [9]. It is normally limited to
zero-tlrlay comlinational or synchronous sequential circuits,
I ~ i tit i h more efficient than the classical Concurrent Algorit him [I?] in terms of ('PU time and memory, as demonstratrtl l)y [lo].
5trucliire
p~iiw//i/fiiir//
tlir
I he
f i'i
iit-driwn
coittpilrd-rodr technique [SI. Only the ele-
inent\ wliicli are li!irl>-to change their value are evaluated
n~ eacli t i n i r step. ay i n the classical event-driven apprmch:
howrvcr. thrir evaluation. together with the scheduliiig of
1066-1409/94 $3.00 0 1994 IEEE
Compiled-Code
Fault
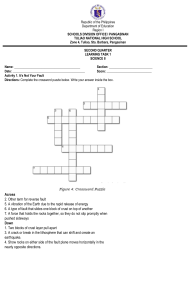
In order to describe this technique, let us refer to the single
fault propagation algorithm outlined i n Fig. 1. The procedure
desrrihed in the pseudo-code is repeated for each input pattern
and for each fault i. The queue used t o record the gates needing
to he evaluated is conceptually a priority queue [5]: in practice it
is implemented as a .set of stacks. one for each level in t h e circuit.
The insertion of a gate in the queue is a ptrah in the stack of the
corresponding level. while the extraction from the structure is a
pop from the lowest level non-empty stack. In this way the gate
evaluations are done in a levelized way [3].
The algorithm can be easily extended t o the parallel-fault case,
provided that each variable containing a value in the code refers
to n faults. being n the parallelism supported by the hardware.
approach [ll]. that exploits the parallelism
iintlerlying liarclware architecture; this technique has
I)wn c-oml)iiw.tlw i t h the previous one in PROOFS [lo] and
IIOPE [TI:
I lie
01
Event-Driven
Simulation
46
f s i m ( FAULT i )
{
1 . r e s t o r e t h e good c i r c u i t v a l u e s
2. r e s e t t h e queue
11. i n s e r t t h e f a u l t s o u r c e i n t h e queue
I . f o r each FF
( a ) i f i t s f a u l t y v a l u e is d i f f e r e n t from t h e
r/
good one
Figure 2 : Sample circuit
i. u p d a t e t h e v a l u e
ii. i n s e r t t h e f a n o u t elements i n t h e queue
.!
to record whether the gate has been already introduced in the
queue. A third set of variables ( p r o c 9 t r x x ) is defined, each
containing the pointer to the procedure for the corresponding
gate (actually, they are just the names of the C functions for
the current implementation, whereas they would be labels in the
assembly level version - see below).
When a fault source is extracted from the queue, its value must
be forced to the faulty value, and the evaluation phase has not
to be activated. A fnulty procedure is thus generated for each
gate; its task is to force the gate t o the faulty value, instead of
executing the evaluation step. If the faulty value is different from
the good one, the fanout elements are inserted in the queue, as in
the good procedure. In order t o avoid the overhead deriving from
the test for the fault source. in each variable p r o c - p t r x x either
the pointer to the goodprocedure, or the pointer to the fuultyone
is written before each simulation step is started; this latter case
occurs when the element corresponds to a fault source simulated
in the current step. When a gate is inserted in the propagation
structure, the function pointer contained in the corresponding
variable proc-ptr-xx is directly inserted in the structure. In
this way the test of step 5 is avoided and the whole step 5 is
reduced to a simpler and more efficient form: while the queue is
not empty, the procedure is activated, whose pointer is extracted
from the queue itself.
Fig. 4 reports the faulty procedure for gate g 3 assuming a stuckat-0 is to be simulated on g 3 during the current simulation step.
The faulty procedure is slightly more complex when the parallelfault technique is used. because the faulty value must be forced
only on the bit which h a s been assigned t o the fault. At each
simulation step n faults are simulated in parallel, n being the
hardware parallelism: for each fault source a mask is created,
which corresponds either to the stuck-at-0 or stuck-at-1 fault.
The masks for the n current faults are correctly positioned on the
hits assigned to each fault before the simulation step is started.
During the simulation step, the faulty procedures force on each
fault source a new-value obtained by accessing to the corresponding variable in the mask set and All'Ding or ORing (depending on the type of the fault) t h e current value of the gate
with the mask. The resulting faulty procedure for gate g 3 stuckat-0 is shown in Fig. 5, where a n d m a s k g 3 is assumed to contain
a 0 in the bit position assigned to the fault. a 1 in any other bit
posit ion.
while t h e r e are elements i n t h e queue
( a ) e x t r a c t an element w
( I ) ) i f w is a f a u l t s o u r c e
i. f o r c e w t o t h e f a u l t y value
else
i. evaluate U
ii. i f t h e output
from t h e good
A. record t h e
D. i n s e r t t h e
queue
v a l u e of w is d i f f e r e n t
one
f a u l t y v a l u e of w
f a n o u t elements of w i n t h e
0 . check t h e POs
7. r e c o r d t h e v a l u e s of t h e f a u l t y FFs
I
I..i!:iirr I: Tlir single fault propagation procedure. The procedure
i, c.\;c-cutr.(l for rach pattern and for each fault.
Implementation
2.2
TORSlhl is composed hy two modules:
the g e n e r a t o r Inotlule: it reads the circuit description. and
g ~ ~ n e r a t et.hc
s good and faulty ( ' procedures for all thr, gate+
iii
the circiiit:
the s i m u l a t o r module: it contains the procedures for the
n
(inplit
user interface and senera1 s i ~ n ~ l a t i onianagement
pattern r c d i n g . fault list updating. detection cliecking. Flil)
47
Flop recording and restoring, good and faulty procedures
activation 1.
proc-g30
{ / * e v a l u a t i o n */
f - v a l - g 3 = AND ( f - V a l - g l , f - v a l - g 2 ) ;
/* propagation */
i f ( f - v a l - g 3 I = g-val-g3)
t if ( i s - a c t i v e - g 4 )
{ i s - a c t i v e - g 4 = TRUE;
i n s e r t (proc-ptr-g4) ;
The simulator module is linked with the object code of the files
produced by the generator module, and an image file is obtained
for each circuit to be simulated. The time spent for running the
generator, compiling the created files, and linking them with the
simulator is an overhead (hereinafter called overhead t i m e ) which
must be added to the real simulation time. The larger the latter
is. the more negligible the overhead time can be considered: in
general, the overhead can be accepted only when a large number
of input patterns have to be simulated, as in the case of fault
dictionaries construction or BIST architectures analysis.
The current version of the generator module produces C code.
As a consequence, some of the techniques proposed in [SI,such
as the use of jump instructions instead of procedure calls, and
loop unrolling, can not be implemented, as the language does not
allow t o use indirect g o t o statements. Further improvements in
efficiency could be obtained by writing the code in the assembly
language, although this would mean to abdicate to the portability constraint. Generating an assembly level version of the good
and faulty procedures would allow us to further optimize their
code by optimally exploiting the available registers. Moreover,
the overhead time could be significantly reduced if the generator
module would produce an Assembly language output.
}
if
{
(is-active-g5)
i s - a c t i v e - g 5 = TRUE;
i n s e r t (proc-ptr-g5) ;
1
}
}
Fignre :3: The procedure for gate g3
f O-proc-g30
{
/ * f a u l t i n j e c t i o n */
f - v a l - g 3 = ZERO;
/* p r o p a g a t i o n */
i f ( f - v a l - g 3 I= g-val-gs)
C if ( i s - a c t i v e - g 4 )
i s - a c t i v e - g 4 = TRUE;
i n s e r t (proc-ptr-g4) ;
3
TORSIM has been run under the VMS operating system on a
VAX 9000 with 256 Mbyte of Main Memory and using the standard VMS C compiler to collect the results reported in the following.
A set of experiments has been performed by simulating 50,000
random patterns on the standard set of synchronous sequential
circuits [2]. A non-collapsed fault list composed of all the faults
on the gate outputs has been considered. The fault dropping
feature has been activated.
The results, in terms of fault coverage, overhead time and simulation time, are reported in Tab. 1. The ratio between the
overhead and the simulation time is also computed, althoiigh
this figure clearly depends on the number of patterns and decreases in a nearly linear way with it. Note that the efficiency
of TORSIM in the simulation phase is so high (asshown below)
that the time required by the whole process (code generation,
compilation, link, and simulation) is by far lower than the one
required by any other existing fault simulator, provided that the
number of patterns is as high as some tens of thousands.
Comparisons with the data reported for other tools are difficult, as the experiments are performed using patterns which are
not available and using different hardware platforms. In the
following, we will compare our results with the ones reported
for PROOFS because the algorithm we adopted is similar to the
PROOFS’Sone; PARIS [4] and HOPE [7] are declared to be more
efficent than PROOFS by a factor of two; the techniques they
use could be integrated in TORSIM. thus reducing the number
of events t o be processed.
To compare the performance of TORSIM with the data reported
in [lo] we made the assumption that for our experiments the
VAX 9000 we used be equivalent to the Sun 4/2SO used in [lo]:
this assumption is based on the fart that the two machines have
roughly the wine C’PL’ power. while tlie memory requirements
of TORSI31 (no more than :32 h1byte) can be satisfied by both
of them. Moreover. we normalized the simulation time to t w o
parameters representing the work done.
The first parameter is the number of gate evaluations. In fact.
this parameter should be roughly tlie Same provided that the
same pattwns. and the same faults are simulated by TORSI11
>
i f (is-active-g5)
c i s - a c t i v e - g 5 = TRUE;
i n s e r t (proc-ptr-g5) ;
>
}
risiirc I: The faulty procedure for gate g 3 assuming the fault
g3/0.
fO-proc-g30
{ /* e v a l u a t i o n */
f - v a l - g 3 = AND ( f - V a l - g l , f - v a l - g 2 ) ;
/* f a u l t i n j e c t i o n */
f-val-g3 = AND ( and-mask-g3, f - v a l - g 3 ) ;
/ * p r o p a g a t i o n */
i f ( f - v a l - g 3 I = g-val-g3)
{ i f (is-active-g4)
{ i s - a c t i v e - g 4 = TRUE;
i n s e r t (proc-ptr-g4) ;
>
i f (is-active-g5)
i s - a c t i v e - g 5 = TRUE;
i n s e r t (proc-ptr-g5) ;
{
>
>
Experimental Results
}
assuming the fault
48
PROOFS. a n d it
i 4 a good indicator of the work done. .An
Tal). 2. the average niiii1I)er of gate evaluations
1 ) ( ~ ~ e c o i ~I)rrfoi.inrtl
(I
by TORSIRI can be estimated to be more
t l i a i i IO t i i i i r 5 grrater t h a n iii PROOFS.
I IIV w'coii(1 I)aranirtrr talirs into account the work done i n terms
01' cirriiit size. nuinl)er of patterns, and final fault coverage: in
L i c t , due to faiilt dropping, the simulation is heavier if the fault
(.o\.cragc i% Io\v~r.since a greater number of faults must be simi i l a t id. \\.c t l i i i s tlefinecl the following parameter
aii(l
\ti11
c a l l scr Iroiii
Circuit
FC'
%>
__
j201( 58.19
95 26
9298
5344
97.57
97.31
5349
24.59
5382
5386
92.49
S400
24.33
45.69
5420
s444
21.60
99.58
5510
18.12
5526
18.04
S526N
90.09
5641
88.39
5713
62.30
5820
S832
62.54
38.86
S838
99.66
s953
99.11
SI196
98.34
S1238
67.69
S1423
88.17
51488
S1494
88.22
71.53
S5378
15.83
S9234
37.19
S13207
17.84
915850
89.92
S35932
22.15
S38417
57.125
S38584
Average
Iicre y is the number of gates, p the number of patterns, and
/! llir f i n a l fault coverage. The results obtained by normalizing
I lii* 4niiilat ion t inir to PC are reported in Tab. 3; in the a:wage
I O R S 1 1 1 is
4
more
than 26 times fa.ster than PROOFS.
Conclusions
.\ iirw al)piwicli to the fault simulation of synchronous sequen~ i a lciii.iiil5 has Ix=en presented. The approach is based on the
ia\-tc.iisioii to thr zero-delay fault simulation of the event-driven
( ciiiipiletl-cotlc*
technique which has been proposed for logic sim-
'This technique drastically reduces the simulation
iildtion [!)I.
b v avoiding run-time accesses to the data structures conlliiiiing tlir circriit topology. For each gate, ad hoc procedures
i l l ( ' geiicratetl. \vliose goal is to efficiently execute the evaluation
a i i ( l propagation tasks. Several high efficiency coding methodolog i r s a n d data structures have been described. A fault simulator
i i a n i t d TORSI11 has been written, which implements the ideas
drscril)e(l i n the paper. A prototype has been used t o provide
r \ I ) r i i i i i r i i t a1 data proving the effectiveness of the approach.
.1 O l l S l l l is particularly suited for special applications like fault
c.o\-rrage computation in BIST architectures or fault dictionary
rtIii.;t riiction for diagnostic purposes; in these cases, very long se( I I I ( Y I ~ P S of input patterns have to be simulated, and the overhead
f11r cotlr generation. compilation and linking can be neglected.
'I lie speetl-rip with respect t o the fault simulator presented in
[I 11 has I)wn computed using several parameters, and it is alwa\'s greatrr than one order of magnitude.
l'lir results could be improved (in terms of overhead and simu1,tt ion timc) if the evaluation/propagation procedures would be
rit ten i n .\ssenibly language. Further improvements could be
olllained I)\.itlrutifying in the circuit some macro-gates and geno i r l t iiig nd hoc procedures for their evaluation. Dynamic Fault
Oi.(lrring [:I] techniques are also considered to increase the effecI i\.ciiess of tlir fault-parallel method.
II i i i r
-
Good
Fault
Siniul
16.43
20.02
20.78
21.8 1
20.91
22.06
24.56
24.00
27.21
27.29
27.78
44.51
47.63
41.95
41.81
50.90
53.39
67.71
65.99
88.04
87.50
86.71
413.23
1018.22
2353.77
4318.41
9637.42
18097.29
18691.34
8.28
14.30
14.40
9.70
13.32
10.07
11.35
10.17
17.60
11.32
10.55
30.26
31.22
28.01
28.79
20.48
23.36
50.41
50.91
55.12
40.95
42.17
194.94
74.34
222.05
381.7
1900.15
1250.33
1898.04
-
4.57
3.61
3.60
89.15
7.31
124.82
51.58
108.99
2.77
129.88
126.82
15.97
19.17
55.29
56.05
129.29
3.48
8.59
11.48
198.68
36.23
36.33
624.39
5553.84
7254.23
17664.8
1769.55
112521.79
14243.95
12.85
17.91
18.00
98.85
20.63
134.89
62.93
119.16
20.37
141.20
137.37
46.23
50.39
83.30
84.84
149.77
26.84
59.00
62.39
253.80
77.18
78.50
819.33
5628.18
7476.28
18046.5
3669.7
113772.12
16141.99
3verllead/
Siniul
0.47
128
112
115
0 12
1811
0 16
0 19
0 LO
1 .14
0 19
0 20
0 OB
0 'i5
0io
0 L9
0 14
1'19
1 15
I 06
0 15
1 13
1 IO
0 io
0 18
0 11
0 24
2 1)3
0 16
0 16
0.77
Table 1: Experimental Data for 50,000 random pattern fault
simulation. The column Simul is the sum of the two previous
ones.
[5] N. Gouders, R. Kaibel: "PARIS: A Parallel Pattern Fault
Simulator for Synchronous Sequential Circuits." ICCAD-91
IEEE Int. Conf. on CAD, Santa Clara (CA), US.4, No\
1991, pp. 542-545
[6] D. Harel, R. Sheng, J Udell. "Efficient Single Fault Prop
agation in Combinational Circults," ICCAD-87: IEEE Int
Conf. on CAD, Santa Clara (CA), USA, Nov. 1987, pp. 2-5
[7] W. Ke, S.C. Seth, B.B. Bhattacharya: "A Fast Fault Simulation Algorithm for Combinational Circuits," ICCAD-88:
IEEE Int. Conf. on CAD, Santa Clara (CA). U S A . Nov.
1988, pp. 166-169
[8] H.K. Lee, D.S. Ha: "HOPE: An Efficient Parallel Fault
Simulator for Synchronous Sequential Circuits," DAC92: ACM/IEEE Design Automation Conference, Anaheim
(CA), I'SA, June 1992. pp. 336-340
References
[ I ] I \ . J . .\ntreich. R1.H. Schulz: "Accelerated Fault Simulation
a i d T A r i l t Grading i n Combinational Circuits," IEEE Trans.
on ('.\D/I('.AS. Nov. 19S7, pp. 701-712
['I
)verllrad
- [
SI
.
I[SI [SI [26.01
12.31
7.28
18.73
1
\\
-
[9] D.M. Lewis: "A Hierarchical Compiled Code Event-Driven
Logic Simulat.or." IEEE Trans. on Computer-Aided Design.
Vol. 10, No. 6, June 1991, pp. 726-737
F. 11yIrz. I). Bryan. I\. Koiniifiski: "('ombinational profil(.\ of seqiirntial benchmark circ:iits," ISCAS-S9: IEEE
Simposiiiiii on ('ircuits .4nd Systems, Portland ( O R ) .
l.S.\. \la>- 1959. pp. 1929-1934
lilt.
[lo] F. Maamari, J. Rajski: "A Fault Simulation Method base(l
on Stern regions," ICCAD-88: IEEE Int. C o d . on CAD.
Santa Clara ( C A ) . USA, Nov. l9SS. pp. 170-173
[:%I(i.1'. ('al)o(li. S. Gai. hl. Sonza Reorda: "Fast Differrntial
l ~ ~ a i i 1Simulation
1
I>>- Dynamic Fault Ordering," ICC'DSI:
1111. ('oiif. on ('oinputer Design, Cambridge, SIA
). Orlolwr 1991. pp. 60-63
[ l l ] T.M. Nicrmann. W.T. Cheng. J.H. Patel: "PROOFS: .\
Fast, Memory Efficient Sequential Circuit Fault Simulator," 2 i i h A C l I Design Auton!ation Conference. J u n e 1990.
pp. 535-.540 and IEEE Trans. on Computer-Aided Design.
Vol. 11. No. 2. Feb. 1992. pp. 198-207
[ I ] S. ( L i . 1'. Soinrnzi. 31. Spalla: .'Fast and Coherent
Siiiiiil.il io11 \vi{ Ii %cro IDelay Elements." IEEF Trans. ou
( ' \ l ) / l ( ' . \ S . \'ol. ('.\LM. No. I . Jan. 19x7, pp. 55-92
49
1
fOHSISI
Time
Ralio
154
[
.
Ix 1000
2G.01
12.85
17.91
18.00
98.8.5
20.63
131.89
62.93
119.16
20.37
141.20
13i.37
46.23
50.39
83.30
a434
149.i7
26.84
59.00
62.39
253.au
77.18
78.50
819.33
wxi8
i176.28
18046.5
3669.70
1 13772.12
16141.9
177
218
219
1.53
203
115
151
160
223
159
164
203
193
192
1aa
Ii o
246
245
246
137
188
182
154
162
I25
135
183
12
129
iao
-
Gate E\
x 1000
15
25
OOFS
Time
A
100
I
130
1 40
32 00
1 40
24 ao
4 10
37 20
N A
N A
22 20
2’; a
30
32
139
129
131
64
65
81
109
446
370
2003
NA
NA
NA
5283
NA
NA
13
ao
20
20
530
16
408
68
618
343
Ratio
1000
-
15 ao
2 50
2 GO
9 GO
9 10
7 60
3 50
6 70
a 20
7 00
23 IO
20 20
99 50
TORSIM vs.
PROOFS
x
13
15
14
I6
11
16
16
I6
N A.
10 33
12.79
14 21
15.36
9.27
17.80
7.02
9.16
9.64
I5
10.35
I4
12
11.42
12
11
14
17
18
1)
9
15
19
18
20
N A.
N A
N.A.
1’
140 90
rt.4.
N A
N A
N.A.
15
--
16.92
15.76
13.29
13.27
9.90
13.46
25.31
24.97
8.85
9.76
9.95
7.66
NA
N A
N A
i1.82
11.95
I<ildr2: (‘onipari~onbetween PROOFS and TORSIM in terms
number o f g a t e e v a l u a t i o n s / t i m e .
[ I ? ] . J . P . Rotlr. Ii..G. Bouricius. P.R. Schneider: “Programmed
AIgorit Iims to Compute Tests to Detect and Distinguish het\rtrii I.‘ailun=s i n Logic Circuits,” IEEE Trans. on Electronic
NO. 5 , Oct. 1967, pp. 567-580
C O I I I ~ ) I I ~~ ‘~OII .XEC-16,
.
[I
$1
E.G. 1-lricli. T.G. Raker: “Concurrent Simulation of Nearly
[tlc~iitical Digital Networks,” Computer, Vol. 7, No. 4.
111). 30- I I. April 1974
UCircuit
s208
s298
s344
s349
s382
s386
s400
s420
s444
s510
s526
s526n
s641
s713
s820
s832
s838
s953
sl196
si23a
s1423
s1488
s1494
s5378
s9234
~13207
~158.50
s35932
s3a4~i
s3a5a4
, Average
TORSlM PROOFS
0.32
0.21
0.22
0.23
0.31
0.24
0.44
0.29
0.28
0.19
0 26
0 26
5.98
8.00
8.68
9.25
7.47
4.13
9.75
5.06
9.77
0.24
0.52
0.21
722
5.55
0.21
0.42
0.32
0.70
0.62
0.41
2.27
0.96
0.40
6.04
6.49
0.23
0.36
0.37
0.30
0.14
0.22
18.96
38.90
39.72
39.59
24.29
17.23
22.00
17.24
34.36
N.A.
11.49
9.34
4.28
5.00
6.61
6.84
4.21
4.26
4.03
4.35
0.22
ratio
-
43.55
36.37
19.45
22.04
18.41
18.49
14.11
31.49
18.25
18.01
13.81
26.61
28.21
15.40
N.A.
N.A.
N.A.
21.20
51.60
N A.
N A.
7.29
26.17
-
Table 3: Simulation time normalized to w
50