Int. J. Pres. Ves. & Piping 13 (1983) 65-83
The Influence of Flanged End Constraints on Smooth
Curved Tubes Under In-Plane Bending
G. Thomson
Ferranti, Edinburgh, Scotland, Great Britain
&
J. Spence
University of Strathclyde, Department of Mechanics of Materials, James Weir Building,
75, Montrose Street, Glasgow G1 IX3, Scotland, Great Britain
(Received: 19 April, 1982)
ABSTRACT
A theoretical solution is presentedjor the in-plane bending linear elastic
dejbrmation behaviour of smooth circular cross-section, constant
thickness pipe bends whose ends are terminated by rigid flanges. The
technique employs the theorem of minimum total potential energy with
suitable kinematieally admissible displacements in the form of trigonometric series. Results are given covering a fairly wide spectrum of
practical bend geometries. These are compared with previous theoretical
predictions and with various published experimental data. Some test
results which were obtained during the present investigation are also
given.
NOMENCLATURE
A, B, C, D, F, G with subscripts: Displacement coefficients.
(A, B, C, D, F, G) (Non-dimensionalised).
Et/(1 - v2).
Et3/(l - v2)12.
Young's Modulus.
nr3t.
with subscripts: Curvature strain.
65
Int. J. Pres. Ves. & Piping 0308-0161/83/$03"00 © Applied Science Publishers Ltd,
1983. Printed in Great Britain
C
D
E
I
K
66
G. T h o m s o n ,
K
M
R
R'
J. S p e n c e
Flexibility factor.
In-plane bending moment.
Radius of bend centreline (4) = 0).
R + r sin qS.
Rigid cross-section centreline displacements.
Total potential energy (non-dimensionalised).
u,,v,
Subscripts
Series subscripts.
Mid-surface radius of pipe cross-section.
Bend wall thickness.
Rigid cross-section displacements.
Distortion displacements.
j, In, H
F
t
H R , UR , W R
H D, UD, W D
Greek symbols
)'o~
7
Bend angle.
with subscript: Shear strain.
Rotation between ends of bend under bending moment,
M.
70
MRo~/E1.
0
2
v
a
q5
with subscript" Strain.
Angle along bend from centre, circumferential coordinate.
Pipe factor, Rt/r 2.
Poisson's ratio.
with subscript: Stress.
Meridional angle, measured around cross-section from
midway between intrados and extrados.
~"J
= 1, j even.
= 0, j odd.
)~= 0, ./even.
= 1, j odd.
JT, M T , N T
Total number of terms in series.
INTRODUCTI ON
With present trends in the petrochemical and power industries towards
higher temperatures and pressures, problems associated with the design
Flanged end constraints on smooth curved tubes
67
and safety assessment of pipework systems have become correspondingly
more complex. In the analysis of such systems the smooth curved pipe
bend merits special attention. Until relatively recently most of the
published analytical work has considered the bend in isolation, 1-3
usually under a pure bending moment, ignoring the influence of
connections to other components in the piping system. Furthermore,
there exists a considerable variance in the results of published experiments
on smooth bends with end constraints. In what follows an attempt will be
made to further the investigation of the effect of end constraints and to
provide the pipework with some information on the behaviour of bends
with rigid flange terminations. Over the last 15 years, several attempts at
an analytical solution have been published, including those by Thailer
and Cheng, 4 Axelrad, 5 Findlay and Spence 6 and Whatham and
Thompson. 7 However, divergence between their results is apparent but
comment will be reserved until later, in order that comparison with the
present work can be given at the same time.
THEORETICAL ANALYSIS
General considerations
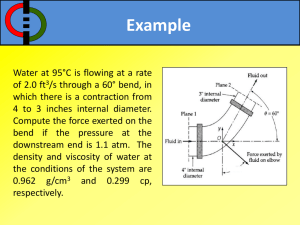
Details of the pipe bend geometry, applied loading and associated
notation are shown in Fig. 1. The bend is considered to be part of a thin
toroidal shell using the shells equation given by Novozhilov. 8 The general
limitations of thin shell theory apply in particular r/t > 10. Results will be
given later for r/t > 5 since many 'real' bends are at, or just below, the thin
shell limitation.
The solution will be obtained using the theorem of minimum total
potential energy on suitable kinematically admissible displacements.
Displacement series formulation
The displacement field is decomposed into two sets. The first set refers to
'rigid cross-section displacements' which are associated with the
movement of the tube cross-section but with no change in its
configuration. The second set describes 'distortion displacements' which
are associated with deformation of the cross-sections relative to the
particular section centre. The kinematic conditions imposed by a flange
sin
Geometry of the smooth pipe bend.
Meridional angle
e Circumferential angle
Fig. I.
LI
.=R.I,~, ]~I
R
d
Fig. 2.
J
~
I
1
~÷
"'v~
WR
y¢=lR
( U c - .6
~@
:)
Rigid section displacements. Displacements are
exaggerated for clarity.
0 / .,~ // I ' . ~.
~
profile
e~
G~
oc
Flanged end constraints on smooth curved tubes
69
are automatically satisfied by the rigid cross-section displacements and
therefore need only be applied to the distortion displacements which
considerably simplifies the displacement formulation.
Rigid cross-section displacements uR, %, wR can be derived from the
bend centreline (4~ = 0) displacement components, U,. and Vc,9 Fig. 2,
using:
r .
(
c3Vc~
u~ = u , . + ~ s m o ~
u,,- ~0/
v~ = V, cos ¢
wR = Vc sin ~b
(1)
The following series equations:
U,.= ~ F ~ ( O - G ~ ) s i n ( J ~ - ) )
j=l
V~.= -
X
DjsinZ\2aj
j= 1,2,3...,JT
(2)
j=l
were selected for Uc and V~ since they satisfy the required boundary
conditions of anti-symmetry and symmetry, respectively at 0 = 0 and
those of a free end at 0 = +_a/2. Unknown coefficients Dj and Fj will be
determined from the minimisation of the total potential energy.
Substitution of eqn. (2) into eqn. (1) gives the rigid cross-section shell
displacements as:
JT
=~F
1/
~ sin ( ~ 0 - ) ) ( 1 + R s i n ~b)
j=l
,IT
1~
I/jzr\ . (jrcO'~r .
j=l
JT
2 j~O
j=l
JT
w. = - ~ D~sin2(jrcO'~
\ 2 ~ j sin~b
j=l
(3)
G, Thomson, J. Spence
70
Distortion displacements uo, vo and w o are associated with deformation
of the normally plane, circular cross-sections, vo and wo being ovalisation
of the sections in their own plane and u o being distortion of the plane. To
satisfy the conditions of a rigid flange u o, vo, w o and Own~dOare required
to be zero at 0 = _ ~/2. The following series can be derived 9 using the
flange conditions, together with appropriate symmetry:
MT NT
/'/D =
,
R ~ ~Amn(~len~ cOSFI¢ + Ooo~-sin.¢
m=l
smi~-- )
n=2
MT NT
Vo= ~ Z B m n ( - ~ e n ! s i n n ( P + ~ o n ! C ° s n ¢
m=l
)
n=2
MT NT
WD= ~ZCmn(OenC°sn~p+~tonSinn~p )
m=ln=2
(re:o)
Hj /
+
2 /jTtO\
L_,
j=l
Total displacement series for u, v and w can then be found from the
summation of the rigid cross-section displacements and the distortion
displacements.
Strains
Strains can now be found by substituting the total displacements into the
shell strain displacement .relationships given by Novozhilov. s
ira,
]
Lra~ a~w]
Flanged end constraints on smooth curved tubes
1 [-Ou
71
]
,% = ~ - Lifo + v cos 4) + w sin 4)
~ s i n 4~ - ~0i- + - - r
K°=
1 [~,v
v-
R'~,u 1
~'o, = k T L~o - u c°s 4~ + r
K°~=r~'-[_~sln~q~
e~ j
a~bT~ ~
R'
\c~0-usinq~/_]
(5)
Total potential energy
The total potential energy for a bend subjected to an in-plane bending
moment can be found from:
V=~flf_~z[(e,4~+%)2-2(1-v)(%eO-¼724,)]rR'dOd(o
C
2n
a/2
+ 2- - ..Io ,3-~/2 [(K,~ + Ko) 2 - 2(1 - v)(KoK ~ - K~4,)lrR'dO ddp - M 7
(6)
The rotation between the ends of the bend 7 can be obtained from:
(7)
as:
JT
~'= ~
j~ sin ( 2 ) ) +
D,/(J~--n)sin ( 2 ) )
(8)
j=l
Non-dimensionalisation of the total potential energy is achieved using:
V= V
/(
:M o )
(1 - v2)n~J
7o-
E1
I=nr3t
(9)
G. Thomson, J. Spence
72
After some re-arranging this gives'
1-2
(g4, + gO)2 -- 2(1 - v)(ioi ~ - ~Y0,)
=
,J - W 2
+ i 2 {(k~ + ko) 2 - 2(1 -
v)(KoK~-k ~ ) }
1 + Rsin 40d0dq~
JT
j~
- (1 - v2)g~
j=l
)~
Rt
r2
R~
r~
R
g----- e - r)~0
K
(10)
Note that the integration limits have been changed to make use of the
symmetry. The displacement coefficients are non-dimensionalised using:
,4,, = Am, r~~°
/~,, = Bm, r7~°
1
= Dr RTo
Solution
Om =Cm, rTo
1
1
RTo
= H~ RT0
technique
Equation (10) was solved for the displacement coefficients using
numerical integration and minimisation on a computer. Numerical
integration was performed using Simpson's rule in two dimensions. In
general 17 and 9 integration points were found to be necessary in the
meridional (~b) and circumferential (0) directions, respectively, to give the
optimum between high accuracy and computer solution time.
Minimisation was performed using the method outlined in the Appendix.
The Fortran program takes less than 3rain to run on an ICL 2980
computer for a fully converged solution.
Flexibility factors for all bend geometries were obtained from:
JT
?,
"
-
,i~z
.
jTz
j=l
which represents the ratio of the end rotation of a bend to the rotation
Flanged end constraints on smooth curved tubes
73
between the ends of a similar length (1 = Rot) of straight pipe under the
same loading conditions.
Stress factors were found in the form:
where (Mr/l) is the peak stress in a straight pipe subjected to the bending
moment, M. The meridional (64;) and circumferential (6o) stress factors
were obtained from:
6ea= (g4~+vg°)-t-2 (Kea+ vK°) ( 1 - v z)
6o= (go+ rico) +_-2(Ko+ vK~) (1
where + and respectively.
- v 2)
refer to the outer and inner surfaces of the shell,
Convergence
Convergence of the displacement series was examined over a range of the
major characterising parameters and the total number of terms found to
give satisfactory convergence for each of the coefficient subscripts j, m and
n was JT = 5, MT = 5 and NT = 6, respectively. This requires the use of
105 displacement coefficients and is suitable for 2 >__0.05, R/r < 10 and
< 180 °. Although reasonable convergence could be obtained by fewer
coefficients when parameters were inside the above ranges, this number
was used for all results presented herein.
RESULTS
Flexibility factors
Flexibility factors for flanged bends under in-plane bending obtained
from the present theory are given in Fig. 3(a), (b) and (c) for bend angles of
180 o, 90 o and 45 °, respectively. The Figures show that flanged bends with
smaller subtended angles and shorter radius have the lowest flexibility.
The general trend is that shorter length bends have lower flexibility. Note
G. Thomson, J. Spence
74
A
L
~
~ND ANGLE = 180
j
los'
"
%~
io
.~
'
.;
'
'
B
2o
BEND ANGLE= 90'
o~ 10
R/r
"
2
05
.1
.2
'5
1
C
i
2l
,
'
1
:'05
Fig. 3.
r
/10
i
i
i
/5
~'1"
i
3
'1
"2
PIPE FACTOR (X)
BEND
,
I
p
*
,
,
AN~LE--~.5"
"5
1
Flexibility factors for flanged bends.
that these results indicate a significant variation not only with the pipe
factor, 2 as in the Karman 1 case without end constraints, but also with
bend angle, ~, and radius ratio, R/r. Furthermore, the present results
cannot be approximated by straight lines on a log-log plot as was the case
with the Karman solution.
Figure 4 shows a comparison of present theory with the earlier work of
Thailer and Cheng 4 and Findlay and Spence. 6 Thailer and Cheng only
published results for ~ = 180 ° and R/r = 3 but these are considerably
higher than the present work.
A close examination for the Thailer and Cheng theory reveals that
although they assumed the shear strain in the bend to be zero they did not
enforce this condition on their displacements. Experimentation with the
present theory has shown that had they done so they would have achieved
results closer to the present ones. The work of Findlay and Spence (one of
Flanged end constraints on smooth curved tubes
,
,
.
.
.
.
,
i
RX:3IO
,
,
i
,
,
P~'esL~" Theory
Whatham & Thompson
......
--.-....
.....
[]
r ~
0C:180oJ ~ . .
,
75
A~etrad
Finley & Sotnce
ThaiIer & Che~g
Finite Element Results
~
Ftanged Bends
E.
~
I
'05
I
I
i
I
]
-1
,,2
i
i
I
"5
h
i
I
I
I
1
Pipe Factor (,~)
Fig. 4.
Comparison of theoretical flexibilities.
the current authors) has recently been re-examined and has been shown to
be inadequate in certain respects.
Experimentation with the present theory has shown that the main
problem with the results in the work of Findlay and Spence 6 was that they
assumed that the circumferential distortion displacement was insignificant and could be neglected. Although this displacement is
generally small, its contribution to the shear strain is, in fact, significant.
Note that by neglecting u o, Findlay and Spence's results show no
variation with radius ratio.
Figure 4 compares the present theory with flexibility factors calculated
from a formula given by Axelrad 5 and with those given by Whatham and
Thompson. 7 The results of Axelrad are approximate, being for only one
term in a series, and are more valid for higher ). values. However, his
results show a similar trend to the current ones, particularly for higher 2
and R / r values. The absolute values are different, probably mainly due to
a number of assumptions employed by Axelrad, most notably that of zero
shear strain. Whatham and Thompson's results compare favourably with
the present theory over a wide range of parameters. Generally, their
flexibility factors are slightly higher than those of the present theory.
Some of this difference is probably due to the present results being a lower
bound. If the (1 - v2) term in the strain energy of the present method is
G. Thomson, J. Spence
76
20
'o
'
~ND'AN&E-180
£ "
10
5
o
o
~2
u
,,<
1
'~' 20
|
,
I
I
,
,
!
!
I
I
•1
-2
,
I
I
,
,
i
:
i
,
,
,
,
;
I
.5
p
,
,
,
BEND ANGLE = 90 °
10
tt t,
+
--
,e.
1
PIPE
2 R/r
3
4,
~;
o
]~
•
+
'"
- - -
Fig. 5.
-~
t
I
tl
I
•2
FACTOR
t
I
I
"5
Present Expt.
Vigness
Oet Buono
Findlay
Whatham
R/r=3 t Theory
Par'due &
Vissat &
Rh'=2
Comparison of theory and experiment.
neglected (as it has been by some investigators to ensure correct
asymptotic behaviour at high 2), the results are much closer to those of
Whatham. However, this term should be included for consistency.
Comparison of flexibility factors with experiment
Comparisons of the flexibility factors from the present theory with
various experimental data are given in Fig. 5. It can be seen that there
exists a considerable spread in the results.
The most comprehensive set of published tests are those of Pardue and
Vigness 1°'11 who tested nine bends with different pipe factors. As some of
their early experiments indicated that different loadings would give
Flanged end constraints on smooth curved tubes
77
different flexibilities they presented 'averaged' factors, together with a
range of the extremes, making direct comparison slightly difficult.
Furthermore, the relatively small thickness of the flanges they adopted for
the tests (cut from ½in thick plate and soldered on to bends which already
had tangent pipes) must cast some doubt on their comparability with the
present theory which assumes rigid flanges.
Vissot and Del-Buono have published results for eight flanged 180 °
bends. 12 However, they adopted a rather unusual definition for flexibility
factor which included the flexibility of connected straight pipes. Some of
their results are slightly odd, since the same bends without flanges gave
lower flexibilities. Generally, their results are slightly higher than the
present theory.
Findlay and Spence provided experimental results from three flanged
bends, two of which had 'adjustable' flanges. The factor for the normal
90 ° welded flange bend compares favourably with the present theory, as
does the 180 ° results with the adjustable flanges. A higher result was
obtained for the 90 o bend using the adjustable flanges, possibly because
the circumferential distortion displacement, which is higher for lower
angle bends, was not inhibited experimentally by the adjustable
arrangement.
Whatham 13 presented results for two 90 ° bends which show good
comparison with the present theory.
In the current programme two bends with flanges were tested and
measured flexibilities are shown in Fig. 5. The 90 ° bend exhibited a higher
flexibility than the theory predicted. This may have been due to the
difficulty experienced during the test of measuring the comparatively
small bend rotation. Good comparison with the theory was obtained
from the more flexible 180 o bend.
Stress factors
In a pipe bend with end constraints, the stress factors vary in the
meridional direction, circumferential directions and through the
thickness, making it difficult to present a comprehensive set of results.
The problem is further aggravated by the maximum stress not being at the
same bend position for all bend geometries. Only typical results for
selected geometries can be given here. For a more complete set of results
refer to either reference 9 or reference 14. The latter is largely based on the
present theory.
QC
1¢
~
105
2
- - 2C
b~
i
. . . .
,
i
i
i
2
".i
,
i
,
I
.1
_ R/r
J,
~L~0
5
.2'
10\
/5 R/r
i
~
"2
/5 R/r
,
.
.
.
.
.
,
i
•
~
•
•
i
' .;
'
"
90°
,
i
•
i
o
BEND ANGLE = ~,5-
'
BEND ANGLE=
,
i
BEND ANGLE = 180°
i
4
-2
"5
PIPE FACTOR (X)
Fig. 6. M c r i d i o n a l stress factors.
-
,
i
10 - - - z - - _ ~
2(]
,
i
1
I
]
•05
=
,
,
,
•
-1
•
R/r
•S
BEND ANGLE =
180 °
-z'
'
F i g . 7.
Circumferential
'
.~
'"
Z ~
stress factors at 0 = 0 °
PIPE FACTOR (X)
2~ B E N D ~ A N G L E ~ -
'"~-
%201 . . . . . . . . . . . . .
/
BEND ANGLE= 90°
1
2
5
1(]
20
t~
@
C~
Flanged end constraints on smooth curved tubes
20
,
79
. . . .
BEND ANGLE = 1800
10
5
1-os
_ 20
,
,
,
.1
-i
,
i
i
. . -s. . . .
,
•
•
'
•
,
,
BEN0 ANGLE = 90°
rv-
10
o
i--
~s
R,r
?
t~
~
....
I "
21-
.i
.~
10
~
R~
~._~.--- - ~
PIPE
Fig. 8.
'
'
.;
'"
_
-BEN0-ANfiLE --.~__~
t
FA£TOR (X)
Circumferential stress factors at 0 = + c(/2.
Figure 6 shows the maximum meridional stress factors for bend angles
of 180 °, 90 ° and 45 °. The m a x i m u m meridional stress always occurs at
the bend centre (0 = 0 °) but can be close to either the pipe centre (4, = 0 °)
or the intrados (~b = - 9 0 ° ) , depending on the values of R/r, ~ and 2.
Generally, bends of short length, i.e. low R/r and ~, are more likely to
have a maximum at the intrados.
Figures 7 and 8 give the peak circumferential stress factors at the bend
centre (0 = 0 °) and at the flange 0 = + ~/2 for bend angles of 180 °, 90 °
and 45 °. The maximum circumferential stress can occur at almost any
meridional position at either of these sections.
Finite element results
To complement the theory, some results for flanged bends have been
attained using the finite element method. Figure 9 shows one of the
G. Thomson, J. Spence
80
Fig. 9.
Finite e l e m e n t m o d e l (using s y m m e t r i e s at 0 = 0 ° a n d ~b = + 90 °).
models used to obtain the results. The models were run using the eight
noded parabolic, six degree of freedom, isoparametric shell element
(NSTIF = 7, I O R D E R = 2) with the SUPERB finite element code on the
VAX 11/750 computer at Ferranti.
As the mesh in Fig. 9 shows, the flanges were modelled by turning the
shell elements on their sides. Experimentation with the models
demonstrated the sensitivity of the bend flexibility factor and stresses to
what might normally be thought of as reasonably thick flanges. For
R = 9 in, r = 3 in, t = 0-28 in and ~ = 90 °, a flange thickness of 1 in gave a
maximum meridional stress factor of 3.7 whereas a thickness of 4 in gave a
factor of 2.4. This behaviour may help explain the wide variation in the
results obtained by the early experiments.
Figure 4 includes the flexibility factors given by the finite element
models. The results are higher than both Whatham's and the present
theory but show a similar trend. The higher results from the finite element
model are probably mainly due to the 'non-rigid' flanges.
CONCLUSIONS
Both theory and experiment demonstrate that the incorporation of
flanges on the ends of a bend causes a significant reduction in its inherent
flexibility. The flexibility factor reduces with bend angle and radius ratio
Flanged end constraints on smooth curved tubes
81
and increases as pipe factor reduces. The results exhibit considerable
sensitivity to the radius ratio, unlike unflanged bends.
Agreement of results from the present theory, Whatham's theory, the
finite element models and the various experiments are affected somewhat
by the flange boundary conditions. The flexibility factors from the theory
presented herein provide a useful lower bound with the assumption of
completely rigid flanges. The effect of flange flexibility on the bend
stresses is more complex. Generally, the results presented provide a
reasonable indication of the likely peak stresses, particularly at the bend
centre, 0 = 0 °.
APPENDIX: MINIMISATION
The total potential energy (TPE) expression for linear elasticity is a
quadratic function of the displacement coefficients. Therefore, when the
T P E is differentiated with respect to each of the unknown coefficients, a
set of linear equations is obtained. Since the displacement coefficients are
not functions of the bend coordinates, integration of the T P E can be
performed without values for the coefficients. Using these principles,
together with the following procedure, provides a fast and efficient
method of evaluating the coefficient. The method determines the matrices
for the linear equations from the T P E function without any hand
manipulation or integration.
The simplest way to explain the technique is with an example.
Consider the following typical T P E quadratic expression:
V = ~ ( a l x2 q-a2x22 + a 3 x l x 2 + a 4 x l + a s x 2 d- a6)d~
where al, a2, a3, a4, a 5 and a 6 are functions of ~ and xx and x 2 are
unknown coefficients.
If all coefficients are given the value of 0 (x 1 = 0, x 2 = 0) then evaluation
of V gives:
a 6 d~
(A(1))
If each coefficient is given the value of 1 with the rest O, then evaluating V
gives:
~(a 1 + a 4 + a 6 ) d ~
x 1= l,x 2=0
j" (a 2 + a 5 + a6) de
x 1 = 0, x 2 = 1
(A(2))
82
G. Thomson, J. Spence
Similarly, making each coefficient the value negative 1 with the rest 0
gives:
j'(a l - a 4 +a6)d~
X1 = - l,x2 = 0
(a 2 - a 5+a6)d~
x 1=0,
x2=-1
(A(3))
Adding eqn. (A(2)) to the corresponding eqn. (A(3)), and subtracting
twice, eqn. (A(1)) gives, respectively:
2yald¢
2j"a 2 d~
(A(4))
which form the diagonal terms of the linear equation matrix.
Subtracting eqn. (A(2)) from eqn. (A(3)) and dividing by two gives:
-ja4d~
- f a s d~
(A(5))
which are the terms of the vector on the right-hand side of the matrix
equation.
Giving one coefficient the value of 1 and then evaluating V with one of
the remainder, given the value of 1, the rest 0, gives:
S(a1+a2+a3+a4+as+a6)d~
xl=l, x2=l
(A(6))
The off-diagonal terms of the matrix are then found by subtracting eqn.
(A(1)) and half of the relevant equations (A(4)) from (A(6)) and adding the
relevant equations (A(5)) giving:
S a 3 d~
(A(7))
Thus, the complete matrix equation can be formulated as:
2~a I d~
j'a3 d~
E
j~a3d~lFx , q = [ - y a 4d~]
2j" a2 d{ ][_x2.] - S a s d ~
which can easily be solved to give the unknown coefficients using a
standard matrix solution technique such as the Gauss algorithm. Further
details of the technique, including a program, can be found in reference 9.
REFERENCES
1. Karman, Von T. Uber die Formanderung Dunnwandiger Rohre insbesonders federner Ausgleichrohre. Zeits V.D.I., 55 (1911), pp. 1889-95.
Flanged end constraints on smooth curved tubes
83
2. Rodabaugh, E. C. and George, H. H. Effect of internal pressure on flexibility
and stress intensification factors of curved pipes or welding elbows. Trans.
ASME, 79 (1957), pp. 939-48.
3. Spence, J. On the bounding of pipe bend flexibility factors. Nuc. Eng.
Design, 12(1) (1970), pp. 39-47.
4. Thailer, H. J. and Cheng, D. H. In-plane bending of a U-shaped circular tube
with end constraints. J. Eng. Industry, 92(4) (1970), pp. 792-6.
5. Axelrad, E. Flexible shell theory and buckling of shells and tubes. Ing.
Archiv. (1978), pp. 95-104.
6. Findlay, G. E. and Spence, J. Flexibility of smooth circular curved tubes
with flanged end constraints. Int. J. Pres. Ves. and Piping (1979).
7. Whatham, J. F. and Thompson, J. J., The bending and pressurising of pipe
bends with flanged tangents. Nuc. Eng. and Design (1979), pp. 17-28.
8. Novozhilov, V. V., Thin shell theory, (Trans Ed. Lowe, P. G.). P. Noordhoff
Ltd., Netherlands 1964.
9. Thomson, G. The influence oj end constraints on pipe bends. Doctoral
Dissertation, University of Strathclyde, 1980.
10. Pardue, T. E. and Vigness, I. Characteristics of pipe bends under applied
moments. Nat'al Research Lab. Rep. No. 111292, Dec., 1953.
11. Pardue, T. E. and Vigness, I. Properties of thin walled curved tubes of short
bend radius. Trans. ASME, 73 (1951), pp. 77-84.
12. Vissat, P. L. and Del Buono, A. J. In-plane bending properties of welding
elbows. Trans. ASME, 77 (1955), p. 161.
13. Whatham, J. F. In-plane bending of flanged pipe elbows. MetalStruct. Conf.
Inst. oJ Eng., Perth, Australia, 1978.
14. ESDU, Flexibilities oj and stresses in thin unpressurised pipe bends with
flanged ends under in-plane bending: Influence of bend angle. Item No. 81041,
Nov. 1981.
15. Thomson, G. and Spence, J. The influence of end constraints on smooth pipe
bends. 6th Int. Conj~ Struct. Mech. Reactor Tech., Paris, 1981.